Предлагаемое изобретение относится к области космической техники. Оно может быть использовано для приведения космического аппарата (КА) с электрореактивной двигательной установкой (ЭРДУ) или другими двигателями малой тяги к рабочей геофизической долготе на геосинхронной или геостационарной орбите (ГСО) при больших начальных отклонениях КА от рабочей долготы и от номинального периода, а также для перевода КА на другую долготу.
Известен способ приведения КА к рабочей долготе на ГСО, описанный в статье [1] А.Е. Назаров «Использование комбинированного метода расчета программы коррекций приведения геостационарного КА для минимизации эксцентриситета орбиты», Вестник ФГУП НПО им. С.А. Лавочкина, 2009, №2, стр. 23-33. В нем приведение выполняется тремя импульсными коррекциями, рассчитываемыми с учетом ошибок измерений элементов орбиты КА и ошибок исполнения коррекций двигательной установкой. Этот способ принципиально не может быть применен, если используются двигатели малой тяги.
Известен способ, описанный в книге [2] Г.М. Чернявский, В.А. Бартенев, В.А. Малышев «Управление орбитой стационарного спутника», М., Машиностроение, 1984 г., стр. 120-126. В нем выполняют многошаговый процесс приведения двигателями малой тяги. На каждом шаге во время полета КА выполняют измерения орбитальных параметров и по результатам измерений вычисляют время начала и длительность воздействия коррекций на этом шаге. При вычислении прогнозируют результат путем решения дифференциальных уравнений движения КА с учетом корректирующего воздействия.
Недостатки этого способа в следующем. Способ не предусматривает ограничений на длительность работы двигателей при очередном включении. Точные измерения на каждом шаге приведения требуют около суток и более времени между коррекциями. Поскольку при применении двигателей со сверхмалой тягой порядка 0,1 Н и ограниченной длительностью работы могут потребоваться десятки шагов приведения, то его общая длительность будет недопустимо большой, особенно при больших начальных отклонениях периода и, соответственно, при большой начальной скорости движения КА по долготе.
В качестве прототипа принят способ, описанный в книге [3] «Космический мусор». В 2 книгах, Кн. 2. «Предупреждение образования космического мусора», под научной редакцией Г.Г. Райкунова, М.: ФИЗМАТЛИТ, 2014 г., стр. 50-52.
В этом способе после испытаний КА с пробными включениями и уточнением тяги двигателей последовательно выполняют: измерение и по их результатам расчет элементов орбиты КА; расчет коррекций, которым уточняют план приведения; коррекции периода орбиты для придания КА заданной скорости движения по долготе; измерение и расчет элементов орбиты для уточнения достигнутой скорости пассивного перемещения; уточнение плана торможения КА на заданной долготе; коррекции периода с целью торможения в окрестности заданной долготы; измерение и расчет элементов орбиты после коррекции периода; уточнение тяги и последнее включение двигателей для точной постановки спутника в заданную орбитальную позицию; выполнение последней коррекции.
Такой способ обычно используют для приведения при нормальной, штатной работе КА и его системы управления. При этом скорость пассивного перемещения, т.е. дрейфа КА по долготе от 0,4 градуса до 1,0 градуса в сутки. Это соответствует отклонению периода обращения КА от 95 до 240 секунд от номинального периода ГСО, составляющего 86164,09 секунды. При необходимости уменьшения длительности приведения скорость дрейфа и отклонение периода могут быть больше, платой за это является риск столкновений с отработавшими КА.
Недостаток прототипа в том, что он неприменим в широком диапазоне начальных отклонений КА от рабочей долготы и от номинального периода. Такие отклонения возникают при больших ошибках выведения КА на квазистационарную орбиту, при временной длительной потере управления КА и при невозможности выведения КА на заданную геофизическую долготу. Этот способ неприменим также при таких малых отклонениях, когда приведение возможно на коротком интервале времени небольшим числом коррекций.
Техническим результатом изобретения является расширение начальных отклонений КА от рабочей долготы и от номинального периода, при которых способ обеспечивает приведение.
Суть изобретения в том, что приведение выполняют через выбираемые и достигаемые с ошибками промежуточные расчетные долготу и период, после которых окончание приведения обеспечено с достаточно малыми отклонениями от целевой рабочей долготы и от номинального периода.
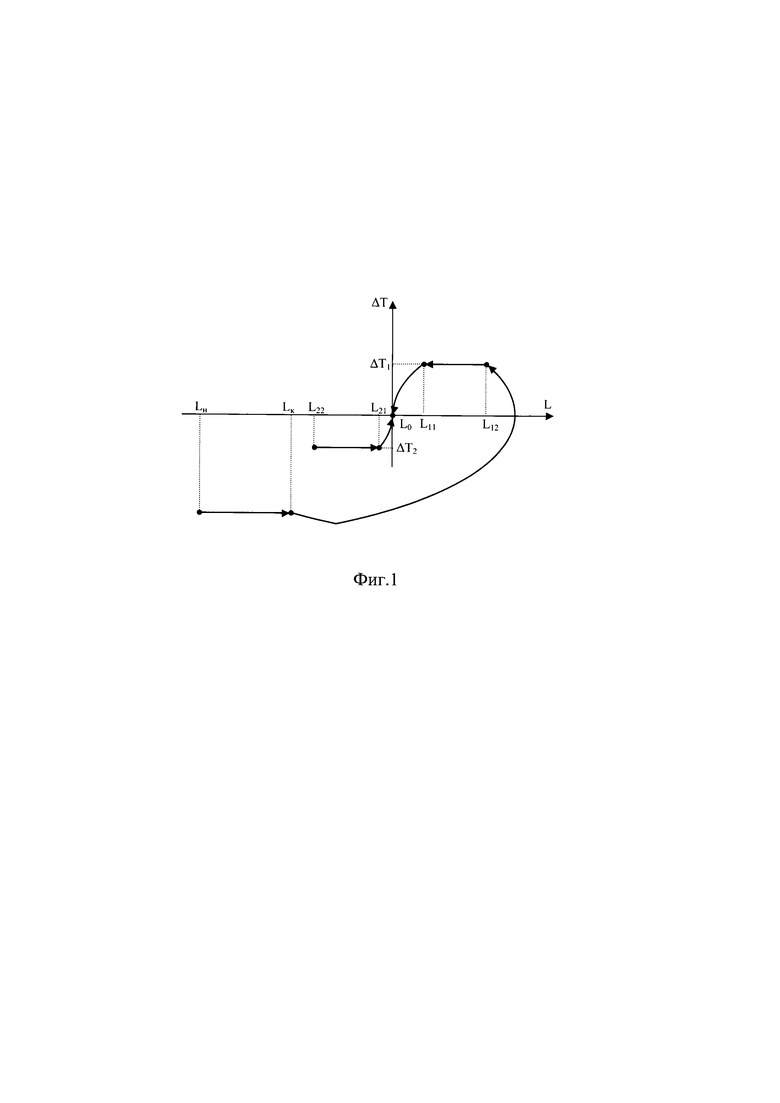
На фиг. 1 приведен пример схемы фазовой траектории приведения в изобретении, в координатах долготы и отклонения периода от номинального периода ГСО. На фиг. 1 и в описании введены обозначения:
L0 - целевая рабочая долгота;
Lн - начальная долгота приведения;
Lк, ΔTк - долгота и отклонение периода в начале коррекций приведения;
L12, ΔT1 - промежуточные расчетная долгота и положительное отклонение периода;
L11, ΔT1 - долгота начала завершающих коррекций и положительное отклонение периода;
L22, ΔT2 - промежуточные расчетная долгота и отрицательное отклонение периода;
L21, ΔT2 - долгота начала завершающих коррекций и отрицательное отклонение периода;
Начальной долготой приведения является Lн. От нее КА пассивно, без коррекций, перемещается к долготе Lк. За время этого перемещения выполняют измерения параметров орбиты КА. После этого рассчитывают план коррекций, начинающихся при достижении долготы Lк и отклонения периода ΔTк.
Сначала рассчитывают план коррекций приведения непосредственно к целевой начальной долготе и к номинальному периоду геосинхронной орбиты. Затем для такого плана рассчитывают диапазон конечных отклонений долготы и периода после выполнения коррекций, возможные из-за ошибок измерений и исполнения коррекций. Если рассчитанные конечные отклонения не превышают допустимые значения, то выполняют коррекции и завершают приведение. Такая ситуация является редкой, особой и возможна в случае малых начальных отклонений.
Если рассчитанные конечные отклонения превышают заданные допустимые значения, то для приведения предварительно находят два варианта промежуточных величин. С этой целью выбирают две величины отклонений периода ΔT1, ΔT2 с разным знаком, ΔT1 от 95 до 240 секунд и ΔT2 от минус 240 до минус 95 секунд. Для каждого из этих выбранных отклонений ΔT1, ΔT2 вычисляют долготу соответственно L11, L21 такую, что для данного КА минимально время его приведения к заданной долготе стояния L0 и к номинальному периоду из начальных положений L11, ΔT1 и L21, ΔT2. Для отклонений периода ΔT1, ΔT2 вычисляют соответственно долготы L12, L22 такие, что при отклонениях периода ΔT1, ΔT2 длительность некорректируемого движения КА от долготы L12 к долготе L11 и от долготы L22 к долготе L21 равна сумме длительности измерения орбиты и длительности смещения КА по долготе на величину возможной ошибки приведения к долготе соответственно L12 с отклонением периода ΔT1 и к долготе L22 с отклонением периода ΔT2.
Для выбора одного из двух вариантов рассчитывают планы коррекций приведения КА от долготы начала коррекций Lк к долготе L12 с отклонением периода ΔT1 и к долготе L22 с отклонением периода ΔT2. Рассчитывают полную длительность приведения к заданной целевой долготе L0 и к номинальному периоду, а также требуемый для приведения расход характеристической скорости для двух вариантов приведения, через долготы L12, L11 с отклонением периода ΔT1 или через долготы L22, L21 с отклонением периода ΔT2. Исходя из рассчитанной длительности приведения и расхода скорости, выбирают вариант приведения через долготы L12, L11 с отклонением периода ΔT1 или через долготы L22, L21 с отклонением периода ΔT2.
На фиг. 1 показан вариант приведения через долготы L12, L11 с отклонением периода ΔT1. Долгота L12 с отклонениями периода ΔT1 является той самой, после достижения которой при приведении в соответствии с сутью изобретения не существенно влияние ошибок измерения орбиты и исполнения оставшихся коррекций. Далее на схеме фиг. 1 от долготы Lк коррекциями по рассчитанному и выбранному варианту плана приводят КА с ошибкой на долготу L12 с отклонением периода ΔT1. Выполняют измерения элементов орбиты КА при его некорректируемом движении от долготы L12 к L11. По данным этих измерений вычисляют длительность достижения долготы L11 и рассчитывают план коррекций приведения от долготы L11 к заданной рабочей долготе L0 и периоду Т0. От момента достижения КА долготы L11 выполняют коррекции приведения к заданной долготе стояния L0 и периоду Т0 и завершают приведение, с возможным выполнением контрольных измерений.
Технический результат изобретения достигается тем, что способ приведения геосинхронного космического аппарата к рабочей долготе двигателями малой тяги, включающий измерения орбиты КА, расчет плана коррекций приведения к заданной рабочей долготе и к номинальному периоду геосинхронной орбиты, выполнение коррекций орбитального движения КА по рассчитанному плану, отличается тем, что выполняют измерения параметров орбиты КА при его некорректируемом движении от начальной долготы приведения Lн к начальной долготе коррекций приведения Lк, рассчитывают план коррекций приведения КА от долготы Lк к заданной долготе L0 и к номинальному периоду геосинхронной орбиты, рассчитывают отклонения долготы КА от долготы L0 и отклонение периода от номинального периода, возможные после приведения по рассчитанному плану из-за ошибок измерений орбиты и ошибок исполнения коррекций, выбирают две величины отклонения периода ΔT1, ΔT2 с разным знаком, ΔT1 от 95 до 240 секунд и ΔT2 от минус 240 до минус 95 секунд, для каждого из двух выбранных отклонений периода ΔT1, ΔT2 вычисляют долготу соответственно L11, L21 такую, что для данного КА минимально время приведения КА к долготе L0 и к номинальному периоду из начальных положений L11, ΔT1 и L21, ΔT2, для отклонений периода ΔT1, ΔT2 вычисляют соответственно долготы L12, L22, такие, что при отклонениях периода ΔT1, ΔT2 длительность некорректируемого движения КА от долготы L12 к долготе L11 и от долготы L22 к долготе L21 равна сумме длительности измерения орбиты и длительности смещения КА по долготе на величину возможной ошибки приведения к долготе соответственно L12 с отклонением периода ΔT1 и к долготе L22 с отклонением периода ΔT2, рассчитывают планы коррекций приведения КА от долготы начала коррекций Lк к долготе L12 с отклонением периода ΔT1 и к долготе L22 с отклонением периода ΔT2, рассчитывают полную длительность приведения к заданной долготе L0 и к номинальному периоду, а также требуемый для приведения расход характеристической скорости для двух вариантов приведения, через долготы L12, L11 с отклонением периода ΔT1 или через долготы L22, L21 с отклонением периода ΔT2, исходя из рассчитанной длительности приведения и расхода скорости, выбирают вариант приведения через долготы L12, L11 с отклонением периода ΔT1 или через долготы L22, L21 с отклонением периода ΔT2, от долготы Lк коррекциями по рассчитанному и выбранному варианту плана приводят КА на долготу L12 с отклонением периода ΔT1 или на долготу L22 с отклонением периода ΔT2., при этом с ошибками в этих величинах, вызванными ошибками измерений и исполнения коррекций, выполняют измерения параметров орбиты КА при его некорректируемом движении от долготы L12 к L11 или от долготы L22 к L21, по данным измерений вычисляют длительность достижения долготы L11 или L21 и рассчитывают план коррекций приведения от долготы L11 или L21 к заданной рабочей долготе L0 и к номинальному периоду, от момента достижения КА долготы L11 или L21 выполняют коррекции приведения к долготе L0 и к номинальному периоду.
Предлагаемый способ реализуется с применением известных методов расчета [4-7].
Вначале методами [4] или [5, 6] рассчитывают план коррекций приведения за минимальное время от начальной долготы Lк к целевой долготе L0 и к номинальному периоду. Затем, исходя из рассчитанного плана коррекций и известных для данной космической системы ошибок измерений и исполнения коррекций, методом [7] вычисляют возможные конечные отклонения долготы и периода от целевых значений. Если эти отклонения не превышают допустимые значения, то выполняют коррекции и завершают приведение. Такая ситуация является редкой, особой и возможна в случае малых начальных отклонений.
Затем выбирают две величины отклонения периода, ΔT1 от 95 до 240 секунд и ΔT2 от минус 240 до минус 95 секунд, в зависимости от характеристик КА и требований по точности его приведения.
Далее рассчитывают долготу L11, такую, что для данного КА минимально время приведения КА от этой долготы L11 к целевой рабочей долготе L0 и к номинальному периоду. Для этого планируют коррекции максимального уменьшения периода от его отклонения ΔT1 при долготе L0 до номинальной величины периода, затем прогнозируют корректируемое движение КА на этом интервале. Долгота, получаемая по результату прогнозирования, принимается равной величине L0-(L0+L11) и из нее получают величину L11, с несущественной ошибкой. Далее получают предварительную величину L12 как сумму долготы L11 и разницы долгот, которую преодолевает КА при отклонении периода ΔT1 и некорректируемом движении за время, достаточное для измерений в данной космической системе. Полученную предварительную величину L12 уточняют несколькими итерациями следующим образом. Методом [6] планируют коррекции приведения к долготе L12 и к отклонению периода ΔT1 от начальной долготы коррекций Lк и отклонения периода ΔTк. Методом [7] вычисляют утроенное среднеквадратическое отклонение долготы из-за ошибок измерений и исполнения коррекций. Долготу L12 увеличивают на вычисленное отклонение и повторяют такие итерации планирования приведения к долготе L12 и ее вычисление до тех пор, пока изменение отклонения в очередной итерации не станет достаточно малым, например, менее 1/10 его полной величины. Запоминают требуемый расход скорости и длительность приведения в последней итерации приведения к долготе L12 и к отклонению периода ΔT1.
Аналогично L11, L12 рассчитывают долготы L21, L22, планируют коррекции приведения к долготе L22 и к отклонению периода ΔT2, определяют требуемый расход скорости и длительность этого приведения.
Для каждого из двух вариантов приведения определяют расход скорости и длительность от начальной долготы коррекций Lк и отклонения периода ΔTк до целевой рабочей долготы L0 и номинального периода. Их получают добавлением к найденным величинам соответствующих величин для интервалов некорректируемого движения при отклонениях периода ΔT1, ΔT2, а также интервалов приведения от этих отклонений к номинальному периоду долготе L0. На интервалах некорректируемого движения расход отсутствует, а длительность вычисляют по разницам крайних долгот этого движения и отклонениям периода. На интервалах приведения эти величины известны из прогнозирования при вычислении долгот L11, L21.
По результатам сравнения длительностей приведения и расходов скорости выбирают вариант для осуществления. В примере на фиг 1 приведение выполняют через промежуточную расчетную долготу L12 и положительное отклонение периода ΔT1.
По рассчитанному плану коррекций приводят КА к долготе L12 и к отклонению периода ΔT1 с ошибками. С учетом этих ошибок уточняют долготу L11, вычисляют время прибытия КА на эту долготу и уточняют план коррекций окончательного приведения к долготе L0 и к номинальному периоду.
При использовании описанного выше способа приведения конечные отклонения от долготы L0 и от номинального периода определяются интервалом приведения от долготы L11 и отклонения периода ΔT1, с учетом ошибок предшествующего интервала приведения.
В случае наличия эксцентриситета и наклонения орбиты КА совершает суточные колебания по долготе. В изобретении долготой считается ее среднее значение в течение звездных суток. Эксцентриситет при необходимости корректируют одновременно с периодом известными способами [2, 4, 5].
Для оценки конечных отклонений используем метод [7]. При расчете в качестве примера примем обозначения и значения величин:
ΔT1=200 с;
m=2500 кг - масса КА;
Δt=8 ч - длительность максимального воздействия на витке;
τ0=0,36 с - среднеквадратическая ошибка измерения периода;
δn=0,02 - относительная среднеквадратическая ошибка трансверсальной коррекции;
Т=86164,09 с - номинальный период ГСО;
k=0,32 с/км - гравитационный параметр;
n - длительность приведения в целых сутках;
F - тяга ЭРДУ.
Длительность приведения в целых сутках:

Ошибка приведения на долготу L0 и период Т, по периоду:

Ошибка приведения на долготу L0 и период Т, по долготе:

Из формул (1-3) ошибки приведения:
ΔT=12 с, ΔL=0,05° при тяге F=0,2 Н;
ΔT=8,2 с, ΔL=0,08° при тяге F=0,1 Н.
Такие ошибки достаточно малы и позволяют перейти к удержанию КА на целевой рабочей долготе L0.
Оценки ошибок приведения на долготу начала завершающих коррекций L11 и отклонение периода ΔT1:ΔT=15 с, ΔL=0,25° при тяге F=0,1 Н и примерном суммарном изменении периода на 600 с. Эти ошибки также достаточно малы для завершения приведения к долготе L0 и периоду Т с необходимой точностью согласно изобретению.
Источники информации.
1. А.Е. Назаров Использование комбинированного метода расчета программы коррекций приведения геостационарного КА для минимизации эксцентриситета орбиты. Вестник ФГУП НПО им. С.А. Лавочкина, 2009, №2, стр. 23-33.
2. Г.М. Чернявский, В.А. Бартенев, В.А. Малышев «Управление орбитой стационарного спутника», М., Машиностроение, 1984 г., стр. 120-126.
3. «Космический мусор». В 2 книгах, Кн. 2. «Предупреждение образования космического мусора», под научной редакцией Г.Г. Райкунова, М.: ФИЗМАТЛИТ, 2014 г., стр. 50-52.
4. А.В. Соколов, Ю.П. Улыбышев Многовитковые маневры с малой тягой в окрестности геостационарной орбиты. Известия Академии наук. Теория и системы управления, 1999, №2, стр. 95-100.
5. А.Р. Агишев, В.Г. Касаткин Планирование коррекций для приведения КА на заданную позицию ГСО двигателями малой тяги. Труды МАИ, №102, 2018, Режим доступа: http://trudymai.ru/upload/iblock/782/Agishev-_Kasatkin_rus.pdf (Дата обращения: 15.11.2018).
6. А.Р. Агишев Расчет коррекций орбиты квазистационарного КА двигателями малой тяги для приведения к заданным долготе и периоду. Труды 61-й Всероссийской научной конференции МФТИ. Аэрокосмические технологии, 2018, стр. 98-99.
7. А.Р. Агишев Расчет среднеквадратических отклонений долготы и периода после завершения серии коррекций вблизи геостационарной орбиты. Труды МАИ, №100, 2018, Режим доступа: http://trudymai.ru/upload/iblock/04c/Agishev_rus.pdf (Дата обращения 04.10.2018).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УДЕРЖАНИЯ КОСМИЧЕСКОГО АППАРАТА НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ ПРИ ПРЕРЫВАНИЯХ ИЗМЕРЕНИЙ И АВТОНОМНОМ ФУНКЦИОНИРОВАНИИ | 2018 |
|
RU2709949C1 |
| СПОСОБ УДЕРЖАНИЯ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА НА ЗАДАННОЙ ОРБИТАЛЬНОЙ ПОЗИЦИИ | 2011 |
|
RU2481249C2 |
| СПОСОБ УДЕРЖАНИЯ КОСМИЧЕСКОГО АППАРАТА НА ГЕОСИНХРОННОЙ 24-ЧАСОВОЙ ОРБИТЕ | 2017 |
|
RU2653949C1 |
| СПОСОБ ПРИВЕДЕНИЯ НА ЗАДАННУЮ ОРБИТАЛЬНУЮ ПОЗИЦИЮ И ПЕРЕВОДА НА НОВУЮ ОРБИТАЛЬНУЮ ПОЗИЦИЮ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА | 2022 |
|
RU2788555C1 |
| СПОСОБ УДЕРЖАНИЯ КОСМИЧЕСКОГО АППАРАТА НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2018 |
|
RU2709957C1 |
| СПОСОБ ТЕСТИРОВАНИЯ ДВИГАТЕЛЕЙ КОРРЕКЦИИ КОСМИЧЕСКОГО АППАРАТА | 2012 |
|
RU2535352C2 |
| СПОСОБ УДЕРЖАНИЯ КОСМИЧЕСКОГО АППАРАТА НА ГЕОСИНХРОННОЙ 24-ЧАСОВОЙ ОРБИТЕ | 2013 |
|
RU2535353C2 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ОКОЛОСТАЦИОНАРНОЙ ОРБИТЕ | 2021 |
|
RU2768994C1 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ОКОЛОСТАЦИОНАРНОЙ ОРБИТЕ | 2018 |
|
RU2703696C1 |
| СПОСОБ УДЕРЖАНИЯ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА НА ЗАДАННОЙ ОРБИТАЛЬНОЙ ПОЗИЦИИ | 2011 |
|
RU2486111C1 |
Изобретение относится к приведению космического аппарата (КА) к номинальным параметрам его геостационарной орбиты при больших начальных отклонениях этих параметров от заданных значений. Согласно способу, ориентированному на применение двигателей малой тяги, приведение КА выполняют через выбираемые и достигаемые с ошибками промежуточные расчетные долготу и период обращения. Предложенный выбор последних и соответствующий план коррекций орбиты КА обеспечивают достаточно малые отклонения от номинальных рабочих значений долготы и периода обращения КА. Техническим результатом является расширение допустимых начальных отклонений от номинальных долготы и периода обращения геостационарного КА, при которых осуществимо указанное приведение. 1 ил.
Способ приведения геосинхронного космического аппарата (КА) к рабочей долготе двигателями малой тяги, включающий измерения орбиты КА, расчет плана коррекций приведения к заданной рабочей долготе и к номинальному периоду геосинхронной орбиты, выполнение коррекций орбитального движения КА по рассчитанному плану, отличающийся тем, что выполняют измерения параметров орбиты КА при его некорректируемом движении от начальной долготы приведения Lн к начальной долготе коррекций приведения Lк, рассчитывают план коррекций приведения КА от долготы Lк к заданной долготе L0 и к номинальному периоду геосинхронной орбиты, рассчитывают отклонения долготы КА от долготы L0 и отклонение периода от номинального периода, возможные после приведения по рассчитанному плану из-за ошибок измерений орбиты и ошибок исполнения коррекций, выбирают две величины отклонения периода ΔТ1, ΔТ2 с разным знаком: ΔТ1 от 95 с до 240 с и ΔТ2 от минус 240 с до минус 95 с, для каждого из двух выбранных отклонений периода ΔТ1, ΔТ2 вычисляют долготу соответственно L11, L21 такую, что для данного КА минимально время приведения КА к долготе L0 и к номинальному периоду из начальных положений L11, ΔТ1 и L21, ΔТ2, для отклонений периода ΔТ1, ΔТ2 вычисляют соответственно долготы L12, L22 такие, что при отклонениях периода ΔТ1, ΔТ2 длительность некорректируемого движения КА от долготы L12 к долготе L11 и от долготы L22 к долготе L21 равна сумме длительности измерения орбиты и длительности смещения КА по долготе на величину возможной ошибки приведения к долготе соответственно L12 с отклонением периода ΔТ1 и к долготе L22 с отклонением периода ΔТ2, рассчитывают планы коррекций приведения КА от долготы начала коррекций Lк к долготе L12 с отклонением периода ΔТ1 и к долготе L22 с отклонением периода ΔТ2, рассчитывают полную длительность приведения к заданной долготе L0 и к номинальному периоду, а также требуемый для приведения расход характеристической скорости для двух вариантов приведения: через долготы L12, L11 с отклонением периода ΔТ1 или через долготы L22, L21 с отклонением периода ΔТ2, исходя из рассчитанной длительности приведения и расхода скорости, выбирают вариант приведения через долготы L12, L11 с отклонением периода ΔТ1 или через долготы L22, L21 с отклонением периода ΔТ2, от долготы Lк коррекциями по рассчитанному и выбранному варианту плана приводят КА на долготу L12 с отклонением периода ΔТ1 или на долготу L22 с отклонением периода ΔТ1, при этом с ошибками в этих величинах, вызванными ошибками измерений и исполнения коррекций, выполняют измерения параметров орбиты КА при его некорректируемом движении от долготы L12 к L11 или от долготы L22 к L21, по данным измерений вычисляют длительность достижения долготы L11 или L21 и рассчитывают план коррекций приведения от долготы L11 или L21 к заданной рабочей долготе L0 и к номинальному периоду, от момента достижения КА долготы L11 или L21 выполняют коррекции приведения к долготе L0 и к номинальному периоду.
| Космический мусор | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Предупреждение образования космического мусора | |||
| Под ред | |||
| д.т.н | |||
| проф | |||
| Г.Г | |||
| Райкунова | |||
| М | |||
| ФИЗМАТЛИТ | |||
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ОКОЛОСТАЦИОНАРНОЙ ОРБИТЕ | 2018 |
|
RU2703696C1 |
| СПОСОБ МОНИТОРИНГОВОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2013 |
|
RU2558959C2 |
| СПОСОБ УПРАВЛЕНИЯ КЛАСТЕРОМ НАХОДЯЩИХСЯ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ СПУТНИКОВ (ВАРИАНТЫ) | 2004 |
|
RU2284950C2 |
| US 4691882 A, 08.09.1987. | |||

