Предлагаемое изобретение относится к области космической техники и может быть использовано для космического аппарата (КА) на геостационарной орбите (ГСО), удерживаемого относительно заданной долготы стояния с повышенной точностью, т.е. с отклонением 0,1 градуса и менее.
Известен способ удержания КА на ГСО, описанный в книге Г.М. Чернявский, В.А. Бартенев, В.А. Малышев «Управление орбитой стационарного спутника», М., Машиностроение, 1984 г., на стр. 126-134. В этом способе удерживают долготу КА управлением по т.н. предельному циклу, обеспечивая тем самым максимальный интервал времени между коррекциями периода с сохранением долготы в заданных границах. Измеряют долготу КА и при достижении отклонения долготы, уменьшенного по сравнению с крайним допустимым отклонением на величину возможной ошибки, вычисляют величину изменения периода, при котором долгота в ее последующей эволюции достигнет противоположного допустимого отклонения, также с учетом ошибки. Далее изменяют, т.е. корректируют период. Величину необходимого изменения периода вычисляют по формулам, соответствующим описанному выше управлению по предельному циклу. Максимальная допустимая длительность интервала времени между коррекциями немного меньше длительности идеального предельного цикла, чтобы учесть погрешности. При допустимом отклонении 0,1 градуса максимальный интервал между коррекциями может быть около одного месяца и более в зависимости от номинальной долготы КА. Контроль нахождения корректируемых параметров в заданных границах при приближении к последним по возможности выполняют ежесуточно.
При применении этого способа выполняют также коррекции эксцентриситета отдельно или одновременно и совместно с коррекциями периода. Если задано ограничение по наклонению, например 0,1 градуса, то также выполняют коррекции наклонения, многократно межу коррекциями периода. Для коррекций используют двигатели сверхмалой тяги.
Известны другие способы удержания КА на геостационарной орбите, в которых выполняют систематические измерения положения КА для контроля выхода за заданные ограничения и при приближении к ограничению рассчитывают коррекции на последующее время. При этом коррекции периода и наклонения могут совмещать, т.е. могут выполнять одновременно. Эти способы описаны в патентах РФ №2381965, RU 2481249 С2.
В книге Сухой Ю.Г. «Коррекции орбит геостационарных спутников», Часть 1, М., Спутник, 2011 г., на стр. 24-25 описан типовой повторяющийся цикл удержания спутника на ГСО двигателями сверхмалой тяги. Согласно указанному описанию длительность такого цикла сокращена в разы по сравнению с длительностью предельного цикла и может составлять от 6 до 14 суток. В одном таком цикле сокращенной длительности последовательно измеряют орбитальные параметры, выполняют коррекции наклонения и принимают решение о проведении коррекции периода с эксцентриситетом, если по прогнозу долгота выйдет за допустимое значение при отсутствии коррекции. В таком случае коррекцию планируют, т.е. рассчитывают и затем исполняют в конце цикла.
Этот способ принят в качестве прототипа.
Общим недостатком известных способов является необходимость систематически контролировать выход КА за допустимые границы и на пункте управления принимать решения, осложненные изменчивостью условий в процессе удержания КА. Такое управление имеет ситуационный характер и требует повышенной квалификации операторов пункта, осуществляющих управление. Другой недостаток состоит в том, что для контроля отклонения погрешность измерений должна быть на порядок меньше его допустимой величины, так что при удержании долготы с погрешностью не более 0,1 градуса необходимо выполнять измерения орбитальных параметров с погрешностью по долготе порядка 0,01 градуса. Это затрудняет создание и эксплуатацию космических систем в связи с необходимостью ввода в их состав высокоточных средств траекторных измерений.
Техническим результатом изобретения является снижение требований к точности измерений и исполнения коррекций, исключение необходимости контроля выхода долготы КА за допустимые границы и упрощение работы операторов пункта управления космическим аппаратом.
Суть изобретения состоит в том, что используют циклы с длительностью, которая много меньше длительности предельного цикла, при этом величину корректирующего изменения периода вычисляют по специальной формуле.
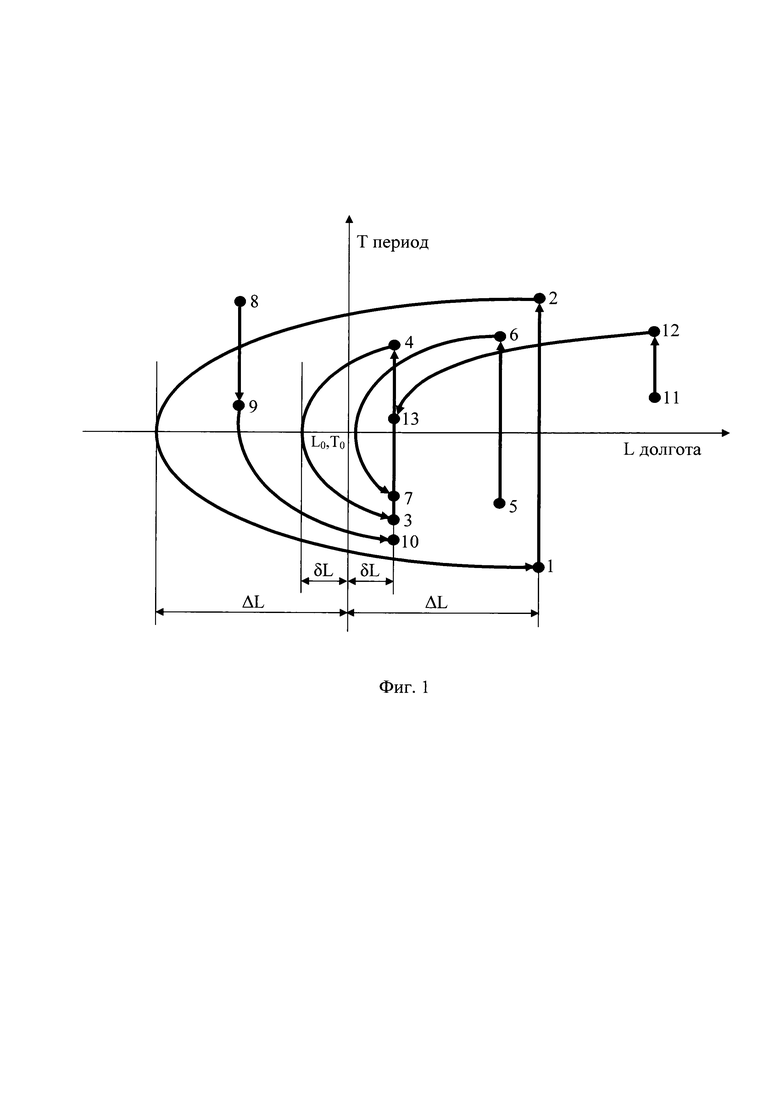
На фиг. 1 схематически показаны фазовые диаграммы вариантов изменения долготы и периода после коррекции периода для случая, когда ближайшая долгота устойчивого равновесия больше поддерживаемой заданной долготы L0.
Обозначения на фиг. 1:
L, T - долгота и период;
L0, T0 - долгота и период, от которых отсчитываются отклонения;
ΔL - максимальное допустимое отклонение долготы;
δL - максимальное отклонение долготы в идеальном сокращенном цикле.
На фиг. 1 точка 1 находится на идеальном предельном цикле, на границе допустимого диапазона долготы: L=L0+ΔL. В течение коррекции периода долготу можно считать неизменной, а период увеличивается и на диаграмме осуществляется переход в точку 2. Затем без коррекций период за время предельного цикла равномерно возвращается к прежнему значению, а долгота при этом изменяется квадратично, достигая другой границы допустимого диапазона L=L0-ΔL. К концу цикла период и долгота снова соответствуют точке 1. За время движения от точки 2 к точке 1 выполняют серию коррекций наклонения, которые могут вносить искажения в изменения периода и долготы.
Если КА удерживают в заданных орбитальных параметрах по такому предельному циклу или стремятся к сокращению числа коррекций периода, то систематически проверяют отклонение долготы, чтобы своевременно скорректировать период, избежав выхода долготы за допустимое значение с поправками на влияние эксцентриситета и погрешностей. Для такого удержания погрешность измерений долготы должна быть мала по сравнению с максимальным допустимым отклонением последней.
На фиг. 1 точка 3 находится на границе уменьшенного цикла: L=L0+δL. Если длительность этого цикла меньше длительности предельного цикла в несколько раз, то δL много меньше ΔL, т.к. отклонение долготы квадратично зависит от отклонения периода. В процессе выполнения такого идеального уменьшенного цикла точки на фазовой диаграмме проходятся в порядке 3-4-3. В реальном случае из-за ошибок измерений, расчета и исполнения коррекций цикл заканчивается со случайными отклонениями периода и долготы относительно точки 3. На фиг. 1 примерам таких отклонений соответствуют точки 5, 8, 11. По данным измерений об отклонениях этих точек вычисляют изменение периода, необходимое для возвращения долготы к величине L0+δL за время предстоящего цикла. Из точек 5, 8, 11 точки на фазовой диаграмме проходятся в порядке 5-6-7, 8-9-10, 11-12-13. Отклонение периода не возвращается к значению, соответствующему точке 3.
В приведенных ниже формулах время и период в секундах, угол в радианах.
Требуемое корректирующее изменение периода ΔT вычисляется исходя из того, что КА на ГСО за достаточно малое время t смещается по долготе на угол

где l - малое угловое смещение;
t - время;
δW - начальное отличие угловой скорости КА от скорости вращения Земли;
dW/dt - производная угловой скорости движения КА на орбите, вблизи долготы удержания.
Выражая δW, dW/dt через отличие сидерического периода от номинального значения и через производную этого периода по времени, из (1) получим

где Т0 - номинальный сидерический период, Т0=86164,09 с;
δТ - начальное отличие периода от номинального Т0;
dT/dt - производная сидерического периода по времени на заданной долготе удержания КА.
Учитывая, что за половину времени цикла долгота изменяется на 2δL, при δТ=0 получим из (2) для номинального отклонения долготы перед коррекцией периода в цикле:

где
τ - длительность цикла или время до следующей коррекции.
Полагая

где L0 - долгота удержания КА,
δL - номинальное отклонение долготы перед коррекцией периода,
L - долгота по результатам измерений,
полагая также

где ΔT - требуемое изменение сидерического периода,
Т0 - номинальный сидерический период,
Т - сидерический период по результатам измерений,
получим из (2, 4, 5):

Отсюда с учетом (3) требуемое изменение периода в цикле:

При отсутствии ошибок измерений и коррекций долгота поддерживается в пределах L0±δL, при этом δL много меньше ΔL. Если долготу необходимо удерживать в пределах L0±ΔL, то требования к погрешностям измерений в предлагаемом способе существенно снижаются. Допустимая погрешность измерений долготы в этом случае может быть порядка допуска ΔL, а погрешности коррекций накапливаются в меньшей мере, чем в продолжительном цикле, т.к. число коррекций наклонения сокращено.
Сокращение времени между коррекциями периода и увеличение их числа, как известно, не увеличивает расход скорости, требуемый для удержания долготы [1]. Вместе с тем, увеличение этого времени не является преимуществом в условиях необходимости коррекций наклонения, поскольку последние должны выполняться двигателями сверхмалой тяги часто, в среднем не реже чем через двое суток.
Технический результат изобретения достигается тем, что способ удержания космического аппарата на геостационарной орбите, в котором выполняют циклы удержания, включающие измерения орбиты, расчет коррекций, коррекции периода орбиты, ее эксцентриситета и наклонения, имеет следующие отличия: длительность цикла удержания много меньше длительности предельного цикла и период орбиты изменяют коррекцией в цикле на величину

где время и период в секундах, долгота в радианах и
ΔT - изменение периода орбиты коррекцией в цикле,
Т0 - номинальный сидерический период, Т0=86164,09 секунды,
L0 - заданная долгота удержания КА,
dT/dt - производная сидерического периода по времени на заданной долготе удержания КА,
L - долгота КА по результатам измерений,
Т - сидерический период по результатам измерений,
τ - длительность цикла или время до следующей коррекции периода.
Предложенный способ реализуется следующим образом.
Определяют максимальную длительность измерений орбиты во время цикла, исходя из требований к точности измерений и возможностей применяемых средств измерений. Например, если в космической системе выполнение траекторных измерений возможно только радиотехническими методами, то для их выполнения и обработки с приемлемой точностью может потребоваться интервал времени не менее трех суток.
Определяют максимальную длительность расчета коррекций, исходя из применяемой технологии этого расчета. При автоматическом расчете этой длительностью можно пренебречь, а при привлечении операторов она может быть порядка одних суток.
Определяют максимальную длительность коррекций периода с эксцентриситетом. При совмещенной коррекции периода с эксцентриситетом эта длительность может быть принята равной одним суткам.
Определяют минимальную достаточную суммарную длительность исполнения коррекций наклонения в цикле. При этом учитывают технологию коррекций, принятую в системе для цикла удержания орбитальных параметров КА, т.е. тягу и длительность включений двигателей, интервалы без включений, прочее. Учитывают, что коррекции наклонения в цикле должны быть достаточны для удержания наклонения на интервале времени цикла при том, что длительность цикла включает длительности измерений, расчета коррекций, выполнения коррекций периода с эксцентриситетом, выполнение коррекций наклонения, а также включает интервал времени, дополняющий длительность цикла до целого числа суток. Пример расчета приведен далее.
Определяют длительность цикла коррекций как целое число суток, включающее сумму длительностей измерений, расчета и исполнения коррекций, а также включающее интервал времени, дополняющий длительность цикла до целого числа суток. Указанные составляющие длительности цикла коррекций, кроме дополнения до целых суток, учитываются со своими допусками. Дополнение длительности коррекций до целого числа суток не обязательно для достижения указанного выше технического результата, но оно унифицирует и упрощает процесс удержания в целом.
Минимальную достаточную суммарную длительность коррекций наклонения в цикле и длительность цикла можно вычислить на основе соотношений:



где: N- длительность цикла;
n - длительность коррекций наклонения в цикле;
Δi - максимальное суточное изменение наклонения без коррекции;
Δimax - максимальное суточное изменение наклонения коррекцией;
n1 - длительность измерений;
n2 - длительность расчета;
n3 - длительность коррекций периода с эксцентриситетом;
ΔN - дополнение длительности цикла до целого числа суток.
Длительности в (8-10) выражены в числе суток с долями.
Соотношение (8) отражает необходимость компенсации естественного увеличения наклонения за время N коррекциями за время n. Соотношение (9) отражает суммирование длительностей составляющих цикла. Соотношение (10) следует из (8, 9) с учетом того, что отыскивается минимальное значение n.
Вычисления выполняют по формулам (8-10) следующим образом. По формуле (10) находят n, полагая ΔN равным максимальному возможному значению, т.е. полагая ΔN=1,0. Далее находят N по формуле (9), полагая ΔN=0. Затем дополняют найденную величину N до целого значения. На эту величину дополнения соответственно увеличивается фактически предусмотренная длительность коррекций наклонения n в цикле.
В виде примера полагая Δi=0,0025 градуса, Δimax=0,0075 градуса, n1=3,0; n2=0; n3=1,0 описанным способом получим N=7,0; n=2,5+0,5=3,0;
При сокращении времени измерений и увеличении тяги двигателей длительность цикла может быть уменьшена, например, до N=5,0 суток. В этом случае для упрощения организации управления полетом КА длительность цикла может быть незначительно увеличена, например, до N=7,0 суток для упрощения организации управления полетом КА на наземном командном пункте.
При полете КА в каждом цикле выполняют измерения. После измерений рассчитывают коррекции, при этом расчете по данным измерений вычисляют величины необходимых изменений орбитальных параметров и формируют график работы двигателей во времени с учетом их ориентации в пространстве, обеспечивающий требуемые изменения. Величину изменения периода вычисляют по формуле (7) или по формуле, полученной из (7) математическими преобразованиями. В формуле (7) время и период в секундах, угол в радианах. Производная dT/dt может быть найдена, например, из известной и представленной в книге [4] на стр. 62 зависимости суточного изменения периода, т.е. величины (dT/dt)T0, от долготы. При практическом применении формула (7) может быть дополнена поправочными членами, учитывающими особенности расчета и выполнения коррекций в конкретной системе. После измерений и расчета выполняют коррекции периода с эксцентриситетом. Затем, в последнюю очередь, выполняют коррекции наклонения. Такой порядок уменьшает возможное негативное влияние коррекций наклонения на точность удержания по долготе.
Технический результат подтвержден имитационным моделированием.
Источники информации.
1. Г.М. Чернявский, В.А. Бартенев, В.А. Малышев «Управление орбитой стационарного спутника», М., Машиностроение, 1984 г.
2. Патент РФ №2381965 «Способ одновременной коррекции удержания вектора наклонения орбиты и периода обращения трехосностабилизированного космического аппарата» / Афанасьев С.М. Открытое акционерное общество «Информационные спутниковые системы» имени академика М.Ф. Решетнева».
3. Патент RU 2481249 «Способ удержания геостационарного космического аппарата на заданной орбитальной позиции» / Афанасьев С.М., Анкудинов А.В. Открытое акционерное общество «Информационные спутниковые системы» имени академика М.Ф. Решетнева».
4. Ю.Г. Сухой «Коррекции орбит геостационарных спутников», Часть 1, М., Спутник, 2011 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УДЕРЖАНИЯ КОСМИЧЕСКОГО АППАРАТА НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ ПРИ ПРЕРЫВАНИЯХ ИЗМЕРЕНИЙ И АВТОНОМНОМ ФУНКЦИОНИРОВАНИИ | 2018 |
|
RU2709949C1 |
| СПОСОБ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2020 |
|
RU2729347C1 |
| СПОСОБ УДЕРЖАНИЯ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА НА ЗАДАННОЙ ОРБИТАЛЬНОЙ ПОЗИЦИИ | 2011 |
|
RU2481249C2 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ОКОЛОСТАЦИОНАРНОЙ ОРБИТЕ | 2021 |
|
RU2768994C1 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2019 |
|
RU2721813C1 |
| СПОСОБ ПРИВЕДЕНИЯ КОСМИЧЕСКОГО АППАРАТА К ДОЛГОТЕ СТОЯНИЯ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2018 |
|
RU2714286C1 |
| СПОСОБ УДЕРЖАНИЯ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА | 2018 |
|
RU2708468C1 |
| СПОСОБ МОНИТОРИНГОВОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2019 |
|
RU2721812C1 |
| СПОСОБ ПРИВЕДЕНИЯ ГЕОСИНХРОННОГО КОСМИЧЕСКОГО АППАРАТА К РАБОЧЕЙ ДОЛГОТЕ ДВИГАТЕЛЯМИ МАЛОЙ ТЯГИ | 2019 |
|
RU2731831C1 |
| СПОСОБ УДЕРЖАНИЯ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА НА ЗАДАННОЙ ОРБИТАЛЬНОЙ ПОЗИЦИИ | 2011 |
|
RU2486111C1 |
Изобретение относится к управлению движением космического аппарата (КА), к удержанию геостационарного КА в заданной области стояния. Способ включает удержание КА на геостационарной орбите путем выполнения циклов удержания, содержащих этапы измерений орбитальных параметров, расчета коррекций, выполнения коррекций периода, эксцентриситета и наклонения. Используют цикл с длительностью, которая много меньше длительности предельного цикла, при этом величину изменения периода вычисляют по специальной формуле. Снижаются требования к точности измерений и исполнения коррекций, исключается необходимость контроля выхода долготы КА за допустимые границы и упрощается работа операторов пункта управления КА. 1 ил.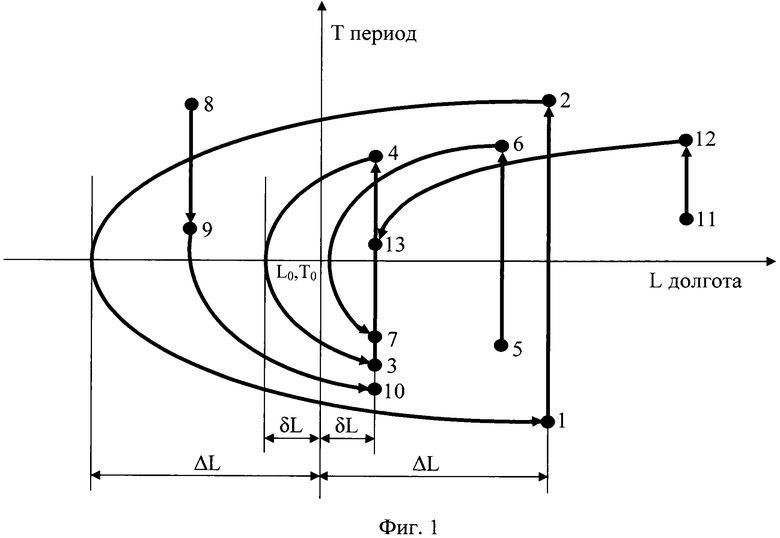
Способ удержания космического аппарата на геостационарной орбите, в котором выполняют циклы удержания, включающие измерения орбиты, расчет коррекций, коррекции периода орбиты, ее эксцентриситета и наклонения, отличающийся тем, что длительность цикла удержания много меньше длительности предельного цикла и период орбиты изменяют коррекцией в цикле на величину

где время и период в секундах, долгота в радианах и
ΔT - изменение периода орбиты коррекцией в цикле,
Т0 - номинальный сидерический период, Т0=86164,09 секунды,
L0 - заданная долгота удержания КА,
dT/dt - производная сидерического периода по времени на заданной долготе удержания КА,
L - долгота КА по результатам измерений,
Т - сидерический период по результатам измерений,
τ - длительность цикла или время до следующей коррекции периода.
| СПОСОБ РЕЗЕРВИРОВАНИЯ КОСМИЧЕСКОГО АППАРАТА НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2013 |
|
RU2558530C2 |
| СПОСОБ ОЧИСТКИ ОРБИТ ОТ КОСМИЧЕСКОГО МУСОРА | 2012 |
|
RU2531679C2 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ ПРИ ЕГО СПУСКЕ С ОРБИТЫ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2014 |
|
RU2561490C1 |
| СПОСОБ УДЕРЖАНИЯ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА НА ЗАДАННОЙ ОРБИТАЛЬНОЙ ПОЗИЦИИ | 2011 |
|
RU2481249C2 |

