УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение в целом относится к бурению скважин и, в частности, к придолотным детекторам гамма-излучения во вращающейся секции роторной управляемой системы.
Углеводороды, такие как нефть и газ, как правило, добывают из подземных пластов, которые могут быть расположены на суше или в море. Выполнение подземных работ и способы, применяемые для извлечения углеводородов из подземного пласта, сложны. Обычно подземные работы предполагают выполнение ряда различных этапов, таких как, например, бурение ствола скважины в требуемом месте расположения скважины, обработка скважины для оптимизации добычи углеводородов и осуществление необходимых этапов для добычи и переработки углеводородов из подземного пласта.
Бурение ствола скважины может включать введение бурового долота в пласт и вращение бурового долота с помощью бурильной колонны. При некоторых операциях роторная управляемая система (РУС) может использоваться для точного позиционирования бурового долота как по вертикали, так и по горизонтали в пласте посредством изменения оси бурового долота по отношению к стволу скважины. Система с направлением долота обычно относится к РУС, в которой ось бурового долота изменяется относительно оси РУС. Система с отклонением долота обычно относится к РУС, в которой поршни с гидравлическим или пневматическим управлением выступают из РУС и контактируют со стенкой ствола скважины.
Бурение ствола скважины может также включать сбор результатов измерений подземного пласта, которые могут направлять процесс бурения. Примеры измерений включают измерение удельного сопротивления, гамма-лучевые, акустические, ядерные, магнитно-резонансные и сейсмические измерения, но не ограничиваются этим. Для применения при управлении получение результатов измерений на буровом долоте или рядом с ним может способствовать более быстрому и точному принятию решений в ходе бурения. Однако выполнение измерений на буровом долоте или около него может быть проблематичным, в зависимости от конфигурации РУС, которая может быть присоединена буровому долоту или расположена непосредственно над ним.
ФИГУРЫ
Некоторые конкретные, приведенные в качестве примера, варианты реализации настоящего изобретения будут понятны частично со ссылкой на следующее описание и сопроводительные графические материалы.
На Фиг. 1 представлена схема, иллюстрирующая приведенную в качестве примера буровую систему, соответствующую аспектам настоящего изобретения.
На Фиг. 2 представлена схема части приведенной в качестве примера РУС, соответствующей аспектам настоящего изобретения.
На Фиг. 3 представлена схема приведенных в качестве примера детекторов гамма-излучения в корпусе, соответствующих аспектам настоящего изобретения.
На Фиг. 4 представлена схема приведенного в качестве примера корпуса, содержащего внутреннюю муфту и внешнюю муфту соответствующего аспектам настоящего изобретения.
На Фиг. 5 представлена схема другого приведенного в качестве примера корпуса, содержащего внутреннюю муфту и внешнюю муфту соответствующего аспектам настоящего изобретения.
На Фиг. 6 представлена схема другого приведенного в качестве примера корпуса, содержащего внутреннюю муфту и внешнюю муфту соответствующего аспектам настоящего изобретения.
Несмотря на то, что варианты реализации данного изобретения были проиллюстрированы и описаны, а также изложены посредством ссылки на приведенные в качестве примера варианты реализации изобретения, эти ссылки не ограничивают изобретение, и такое ограничение не подразумевается. Раскрываемый объект изобретения допускает значительную модификацию, изменение и эквиваленты по форме и функции, что будет очевидно для специалистов в данной области техники, которые ознакомятся с настоящим описанием. Раскрытые варианты осуществления настоящего изобретения приведены лишь в качестве примеров и не исчерпывают объем изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение в целом относится к бурению скважин и, в частности, к придолотным детекторам гамма-излучения во вращающейся секции роторной управляемой системы.
Для ясности, в настоящем описании могут быть изложены не все особенности фактической реализации. Разумеется, следует иметь в виду, что при разработке любого такого фактического варианта реализации изобретения для достижения конкретных целей реализации приняты многочисленные специфичные для реализации решения, которые будут изменяться от одного варианта реализации изобретения к другому. Кроме того, следует иметь в виду, что такой процесс разработки может быть сложным и продолжительным, тем не менее, эта разработка будет рутинным мероприятием для специалистов в данной области техники, ознакомляющихся с данным описанием.
Для облегчения понимания настоящего изобретения приведены следующие примеры некоторых из вариантов реализации. Приведенные ниже примеры ни в коем случае не следует рассматривать как ограничивающие или определяющие объем данного изобретения. Варианты реализации данного изобретения могут быть применимы к горизонтальным, вертикальным, отклоненным или другим нелинейным стволам скважины в любом типе подземного пласта. Варианты реализации изобретения могут быть применимы к нагнетательным скважинам, а также добывающим скважинам, включая углеводородные скважины. Варианты осуществления могут быть реализованы с использованием инструмента, подходящего для тестирования, извлечения и отбора проб вдоль секций пласта. Варианты осуществления могут быть реализованы посредством инструментов, которые, например, могут быть переправлены через канал потока в колонне труб или с использованием кабеля, тросовой проволоки, колонны гибких труб, скважинного робота и т.п.
Некоторые системы и способы обсуждаются ниже в контексте операций бурения и добычи нефти, в ходе которых получают информацию относительно параметров и условий в скважине. Существует несколько способов для сбора скважинной информации, включая каротаж во время бурении («КВБ») и измерения во время бурении («ИВБ»). При КВБ данные обычно собирают во время процесса бурения, таким образом, избегая любой необходимости извлечения бурового снаряда для погружения проводного каротажного прибора. Следовательно, КВБ обеспечивает возможность оператору, осуществляющему бурение, вносить точные модификации или исправления в режиме реального времени для оптимизации производительности, при этом сводя к минимуму время простоя. Термин «ИВБ» обозначает измерение условий в скважине, относящихся к перемещению и расположению бурового снаряда во время продолжения бурения. КВБ более сосредоточен на измерении параметров пласта. Хотя существуют различия между ИВБ и КВБ, термины ИВБ и КВБ часто используют взаимозаменяемо. В настоящем описании термин КВБ будет использован с пониманием того, что этот термин включает сбор параметров пласта и сбор информации, относящейся к перемещению и расположению бурового снаряда.
В настоящем описании система обработки информации может содержать любые средства или совокупности средств, способные вычислять, классифицировать, обрабатывать, передавать, принимать, получать, создавать, коммутировать, хранить, отображать, обнаруживать, регистрировать, записывать, воспроизводить, идентифицировать или использовать любую форму информации, сведений или данных для бизнеса, науки, управления или других целей. Например, системой обработки информации может быть персональный компьютер, сетевое запоминающее устройство или любое другое подходящее устройство, которое может иметь разные размеры, форму, производительность, функции и цену. Система обработки информации может содержать оперативное запоминающее устройство (ОЗУ), один или более ресурсов обработки, таких как центральный процессор (ЦП), аппаратные или программные логические схемы управления, ПЗУ, и/или другие типы энергонезависимой памяти. Дополнительные компоненты системы обработки информации могут содержать один или более дисководов, один или более сетевых портов для связи с внешними устройствами, а также различные устройства ввода-вывода, такие как клавиатура, мышь и видеодисплей. Система обработки информации может также содержать одну или более шин, способных передавать информацию между различными компонентами аппаратного обеспечения. Она может также включать один или более интерфейсов, способных передавать один или более сигналов на контроллер, исполнительный механизм или подобное устройство.
В данном описании читаемые компьютером носители могут включать любые приспособления или сочетание приспособлений, которые могут сохранять данные и/или команды в течение определенного периода времени. Читаемые компьютером носители могут включать, например, без ограничений, носители информации, такие как запоминающее устройство прямого доступа (например, накопитель на жестком диске или накопитель на гибких дисках), запоминающее устройство с последовательным доступом (например, накопитель на магнитной ленте), компакт-диск, CD-ROM, DVD, ОЗУ, ПЗУ, электрически стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ) и/или флэш-память; а также среды передачи данных, такие как провода, оптические волокна, сверхвысокочастотные волны, радиоволны и другие электромагнитные и/или оптические носители и/или любые их комбинации.
Термины «соединять» или «соединяет», применяемые в данном документе, могут обозначать либо прямое, либо косвенное соединение. Например, два механически соединенных устройства могут быть соединены механически прямо, если механическое соединение подразумевает близкий или непосредственный физический контакт между двумя устройствами, или соединены механически косвенно, если каждое из двух устройств присоединено к промежуточныму компоненту или конструкции. Термин «соединен с возможностью связи», применяемый в данном документе, обычно относится к электронному (или, в некоторых случаях, гидравлическому) соединению между двумя элементами, через которое они могут осуществлять электронную (или гидравлическую) связь. Электронное соединение обычно делает возможным поток электрической энергии и/или данных между элементами. Такая электронная связь может представлять собой проводную и/или беспроводную связь, например, с помощью Wi-fi, Bluetooth или другого беспроводного протокола, LAN, коаксиального кабеля, волоконно-оптического кабеля, проводных физических соединений, дорожек на монтажной плате или любой другой среды для передачи сигналов или их комбинации. Как и в случае прямых и косвенных физических соединений, первое устройство может быть прямо соединено с возможностью связи со вторым устройством, например, прямым электронным соединением, или косвенно соединено с возможностью связи через промежуточные устройства и/или соединения.
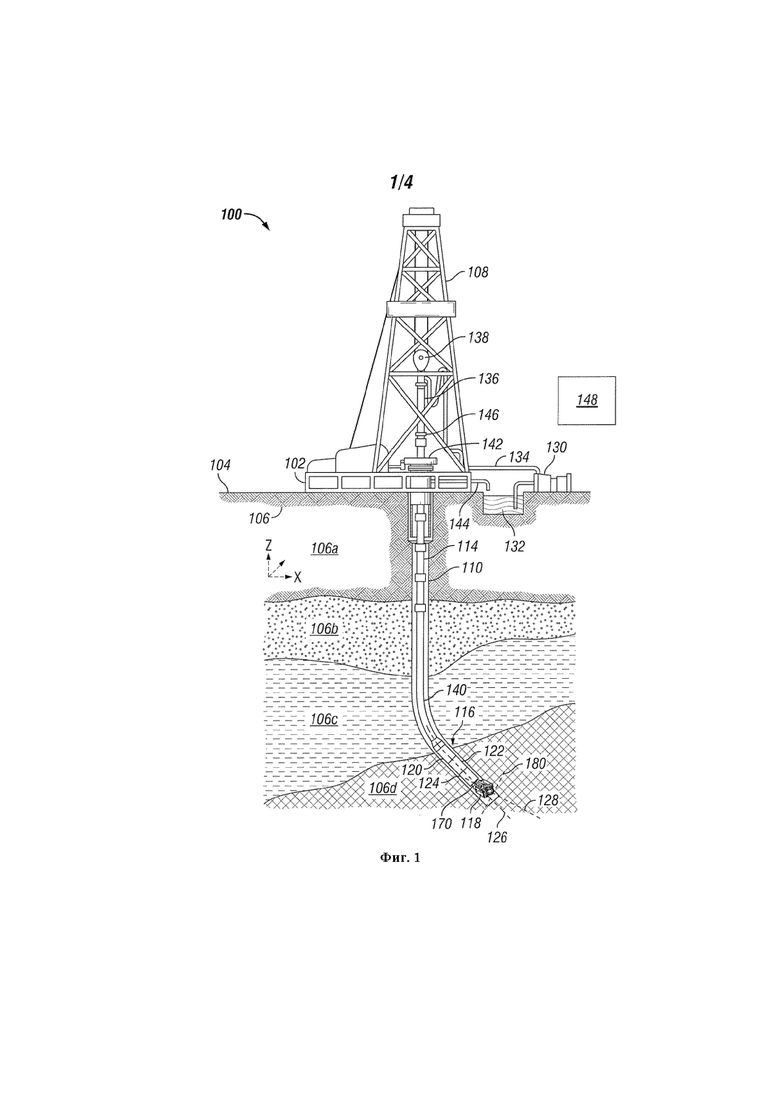
На Фиг. 1 представлена схема подземной буровой системы 100, включающей приведенную в качестве примера РУС 124, соответствующей аспектам настоящего изобретения. Буровая система 100 содержит буровую платформу 102, расположенную на поверхности 104. В показанном варианте реализации изобретения поверхность 104 включает верхнюю часть пласта 106, содержащую одну или более породных толщ или слоев 106a-d, а буровая платформа 102 может быть в контакте с поверхностью 104. В других вариантах реализации изобретения, таких как операции морского бурения, поверхность 104 может быть отделена от буровой платформы 102 объемом воды.
Буровая система 100 содержит буровую вышку 108, поддерживаемую буровой платформой 102, и имеющую талевый блок 138 для подъема и спуска бурильной колонны 114. Ведущая труба 136 может поддерживать бурильную колонну 114 при ее опускании через роторный стол 142 в ствол скважины 110. Насос 130 может прокачивать буровой раствор через питающую трубу 134 в ведущую бурильную трубу 136, в скважину через внутреннюю часть бурильной колонны 114, через отверстия в буровом долоте 118, обратно на поверхность через кольцевое пространство 140, сформированное бурильной колонной 114 и стенкой ствола скважины 110. Оказавшись на поверхности, буровой раствор может выходить из кольцевого пространства 140 через трубу 144 и в сточный резервуар 132. Буровой раствор переносит буровой шлам из ствола скважины 110 в резервуар 132 и способствует сохранению целостности ствола скважины 110.
Буровая система 100 может содержать компоновку низа бурильной колонны (КНБК) 116, присоединенную к бурильной колонне 114 рядом с бурильным долотом 118. КНБК 116 может содержать инструмент КВБ/ИВБ 122 и телеметрический прибор 120. Инструмент КВБ/ИВБ 122 может содержать приемники и/или передатчики (например, антенны, способные принимать и/или передавать один или более электромагнитных сигналов). По мере прохождения ствола скважины 110 при бурении пласта 106, инструмент КВБ/ИВБ 122 может собирать данные измерений, касающиеся различных характеристик пласта, а также ориентации и положения инструмента и прочих условий бурения.
Телеметрический прибор 120 может передавать результаты измерений от КНБК 116 на поверхностный приемник 146 и/или принимать команды от поверхностного приемника 146. Результаты измерений могут включать результаты измерений от инструмента КВБ/ИВБ 122 и/или от РУС 124, как будет описано ниже. Телеметрический прибор 120 может передавать измерения или данные через один или более проводных или беспроводных каналов связи (например, трубу со встроенным кабелем или распространение ЭМВ). В альтернативном варианте телеметрический прибор 120 может передавать данные в виде серии импульсов или модуляций давления в потоке бурового раствора (например, телеметрия по гидроимпульсному каналу связи или гидросиреновому каналу связи) или в виде серии акустических импульсов, которые распространяются к поверхности через среду, такую как бурильная колонна 114. Команды, принимаемые телеметрическим прибором 120, могут передаваться на элементы КНБК 116, которым направляются команды.
В некоторых вариантах реализации изобретения буровая система 100 может содержать систему обработки информации 148, расположенную на поверхности 104. Система обработки информации 148 может быть присоединена с возможностью связи к поверхностному приемнику 146 и может получать результаты измерений от КНБК 116 и/или передавать команды на КНБК 116 через поверхностный приемник 146. Система обработки информации 148 может также принимать результаты измерений от элементов КНБК 116, когда они поступают на поверхность 102. В некоторых вариантах реализации изобретения система обработки информации 148 может обрабатывать результаты измерений для определения некоторых характеристик пласта 106 и может передавать команды на один или более элементов КНБК 116, основанных по меньшей мере частично на определенных свойствах пласта.
Буровое долото 118 может приводиться в действие забойным двигателем (не показан) и/или вращением бурильной колонны 114 для бурения ствола скважины 110 в пласте 106. В некоторых вариантах реализации изобретения забойный двигатель (не показан) может быть встроен в КНБК 116 непосредственно над буровым долотом 118 и может вращать буровое долото 118 с помощью энергии, полученной от потока бурового раствора через бурильную колонну 114. В вариантах реализации изобретения, в которых буровое долото 118 приводится в движение вращением бурильной колонны 114, роторный стол 142 может передавать вращающий момент и вращение на бурильную колонну 114, а бурильная колонна 114 в свою очередь передавать его на буровое долото 118 и элементы КНБК 116.
В некоторых вариантах реализации изобретения КНБК 116 может дополнительно содержать механизм управления, например, РУС 124. РУС 124 может быть присоединен к буровому долоту 118 и может управлять направлением бурения буровой системы 100, управляя по меньшей мере одним из: углом продольной оси 126 РУС 124 относительно оси ствола скважины 110 или углом продольной оси 128 бурового долота 118 относительно РУС 124. Изменение одного или обоих этих углов может смещать переднюю поверхность 180 бурового долота 118 так, что она перестает быть параллельной дну ствола скважины 110, таким образом, приводя к тому, что буровой снаряд продолжает бурить ствол скважины с отклонением направления относительно непосредственно предшествующей части ствола скважины. В некоторых вариантах реализации изобретения РУС 124 может изменять направление бурения буровой системы 100 в ответ на команды, передаваемые системой обработки информации 148.
В показанном варианте реализации изобретения РУС 124 содержит систему с направлением долота, в которой внутренний приводной вал (не показан) РУС 124 вращается, приводя в движение буровое долото, и отклоняется на угол продольной оси 128 бурового долота 118 относительно РУС 124. В соответствии с аспектами настоящего изобретения, по меньшей мере один детектор гамма-излучения (не показан) может быть вращательно присоединен к приводному валу для выполнения гамма-лучевых измерений пласта 106 на буровом долоте 118 или рядом с ним. Как будет детально описано ниже, по меньшей мере один детектор гамма-излучения может выполнять измерения как во время вращения с внутренним приводным валом, так и в состоянии покоя, предоставляя широкий диапазон измерений, на основании которых могут приниматься управляющие решения. Результаты этих измерений могут приниматься системой обработки информации 148 либо путем передачи через телеметрический прибор 120 и поверхностный приемник 146, либо когда РУС 124 извлекают на поверхность, и обрабатывают для направления управляющих решений.
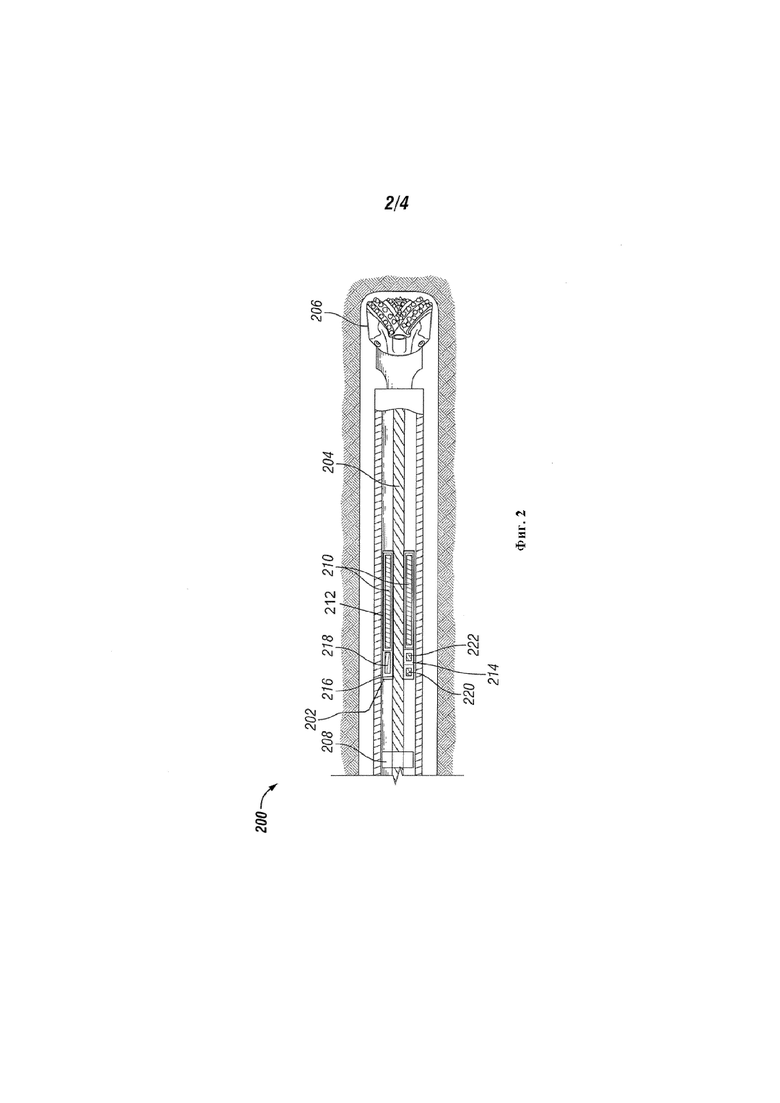
На Фиг. 2 представлена схема части приведенной в качестве примера РУС 200 соответствующей аспектам настоящего изобретения. В показанном варианте реализации изобретения РУС 200 содержит внешний корпус 202 и приводной вал 204, по меньшей мере частично расположенный внутри внешнего корпуса 202 и вращательно независимый от него. Приводной вал 204 может быть присоединен к буровому долоту 206 на одном конце и к источнику вращающего момента (не показан) на другом конце. Приведенные в качестве примера источники вращающего момента включают забойный двигатель и бурильную колонну, вращаемую с поверхности верхним приводом. Во время операций бурения источник вращающего момента может вращать приводной вал 204, который, в свою очередь, вращает буровое долото 206 и заставляет буровое долото 206 врезаться в пласт, в то время как внешний корпус 202 может в целом оставаться неподвижным. В показанном варианте реализации изобретения продольная ось бурового долота 206 может быть изменена с помощью отклоняющего устройства 208, такого как эксцентрические кольца, присоединенные к внешнему корпусу 202 для радиального отклонения приводного вала 204 внутри корпуса 202 во время работы.
В соответствии с аспектами настоящего изобретения, РУС 200 может содержать по меньшей мере один детектор гамма-излучения 210, вращательно присоединенный к приводному валу 204 внутри внешнего корпуса 202. По меньшей мере один детектор гамма-излучения 210 может содержать детектор гамма-излучения любого типа, обычно используемого для измерений внутри скважины, что будет понятно специалисту в данной области техники при ознакомлении с настоящим описанием. Примеры датчиков включают один или более счетчиков Гейгера-Мюллера и фоточувствительный матричный сцинтиллирующий кристалл с одним или более оптических датчиков, таких как фотоэлектронный умножитель, фотоэлемент, регулируемый резистивный диод, фотодиод или фотонный датчик на квантовых точках на основе графена.
В показанном варианте реализации изобретения по меньшей мере один детектор гамма-излучения 210 содержит множество детекторов гамма-излучения, расположенных внутри по меньшей мере одной полости под давлением 212 в корпусе 214. По меньшей мере одна полость под давлением 212 может проходить обслуживание при атмосферном давлении для обеспечения надлежащей работы детектора 210. В некоторых вариантах реализации изобретения множество детекторов гамма-излучения 210 могут быть разделены равными угловыми интервалами вокруг корпуса 214 или связаны вместе для обеспечения измерений с повышенной направленной чувствительностью. Кроме того, множество детекторов гамма-излучения 210 могут быть расположены внутри множества полостей под давлением, разделенных равными угловыми интервалами вокруг корпуса 214, как будет детально описано ниже.
В показанном варианте реализации изобретения детекторы 210 расположены продольно параллельно внешнему корпусу 202 и имеют одинаковую длину. Как будет понятно специалисту в данной области техники при ознакомлении с настоящим описанием, чувствительность детектора гамма-излучения может положительно коррелироваться с его размером. Соответственно, длина детекторов 210 и корпуса 214/полости под давлением 212 для размещения детекторов 210 может изменяться на основании требуемой чувствительности измерений и физических ограничений РУС 200. В других вариантах реализации изобретения длина детекторов 210 может быть неравномерной и/или детекторы 210 могут иметь разную ориентацию внутри корпуса 214.
Корпус 214 может быть вращательно присоединен к приводному валу 204 так, чтобы корпус 212 и детекторы гамма-излучения 210 вращались с такой же скоростью и направлением, что и приводной вал 204. В показанном варианте реализации изобретения корпус 214 вращательно присоединен к приводному валу 204 посредством ряда продольных шлицов 216, сформированных на внешней поверхности приводного вала 204 и внутренней поверхности корпуса 214. Использование корпуса 214 и шлицов 216 для вращательного соединения детекторов гамма-излучения 210 с приводным валом 204 не является ограничением, поскольку могут быть использованы другие механизмы.
В показанном варианте реализации изобретения детекторы 210 и корпус 212 расположены на механизме отклонения 208 со стороны бурового долота, чтобы сделать возможным более близкое расположение детекторов 210 к буровому долоту 206. Это может повысить точность результатов измерений и скорость принятия соответствующих управляющих решений. В других вариантах реализации изобретения детекторы 210 могут быть расположены в других местах вдоль приводного вала 204, в том числе на стороне механизма отклонения 208, противоположной буровому долоту 206.
Корпус 210 может дополнительно содержать электронное оборудование, связанное с детекторами 210. Электронное оборудование может содержать по меньшей мере один из: блок управления 218, источник питания 220 и датчик положения 222. Источник питания 220 может содержать, например, батарейный источник питания или конденсаторную батарею. В других вариантах реализации изобретения источник питания 220 может быть расположен вне корпуса 214, а питание может подаваться в корпус через одно или более электрических соединений (не показано), таких как индуктивное соединение между корпусом 214 и внешним корпусом 202. Датчик положения 222 может содержать, например, акселерометр, магнитометр или любой другой датчик с возможностью его использования для определения углового положения корпуса 214 внутри ствола скважины, что будет понятно специалисту в данной области техники при ознакомлении с настоящим описанием. В некоторых вариантах реализации изобретения датчик положения 222 может в качестве эталона использовать данные об угловом положении внешнего корпуса 202, который может практически не вращаться во время использования.
Блок управления 218 может быть присоединен к источнику питания 220, датчику положения 222 и детекторам гамма-излучения 210. Блок управления 218 может получать питание от источника питания 220 и результаты измерений как от датчика положения 222, так и от детекторов гамма-излучения 210 и может обрабатывать результаты измерений, полученные от детекторов гамма-излучения 210, используя результат измерения, полученный от датчика положения 222, как будет описано ниже. Блок управления 218 может содержать процессор, примеры которого могут включать микропроцессоры, микроконтроллеры, цифровые сигнальные процессоры (DSP), специализированные интегральные микросхемы (ASIC) или любые другие цифровые или аналоговые схемы, выполненные с возможностью интерпретирования и/или выполнения программных инструкций и/или обработки данных. Блок управления 218 может также содержать элемент памяти, соединенный с возможностью связи с процессором. Процессор может быть выполнен с возможностью интерпретирования и/или выполнения программных инструкций и/или данных, хранящихся в памяти. Приведенные в качестве примера элементы памяти включают энергонезависимые носители, читаемые компьютером, которые могут содержать любую систему, устройство или аппарат, выполненные с возможностью удержания и/или размещения одного или более модулей памяти; например, память может содержать память только для чтения, память с произвольной выборкой, твердотельную память или память на дисках. Каждый модуль памяти может содержать любую систему, устройство или аппарат, выполненные с возможностью хранения программных инструкций и/или данных в течение определенного периода времени (например, энергонезависимые носители, читаемые компьютером).
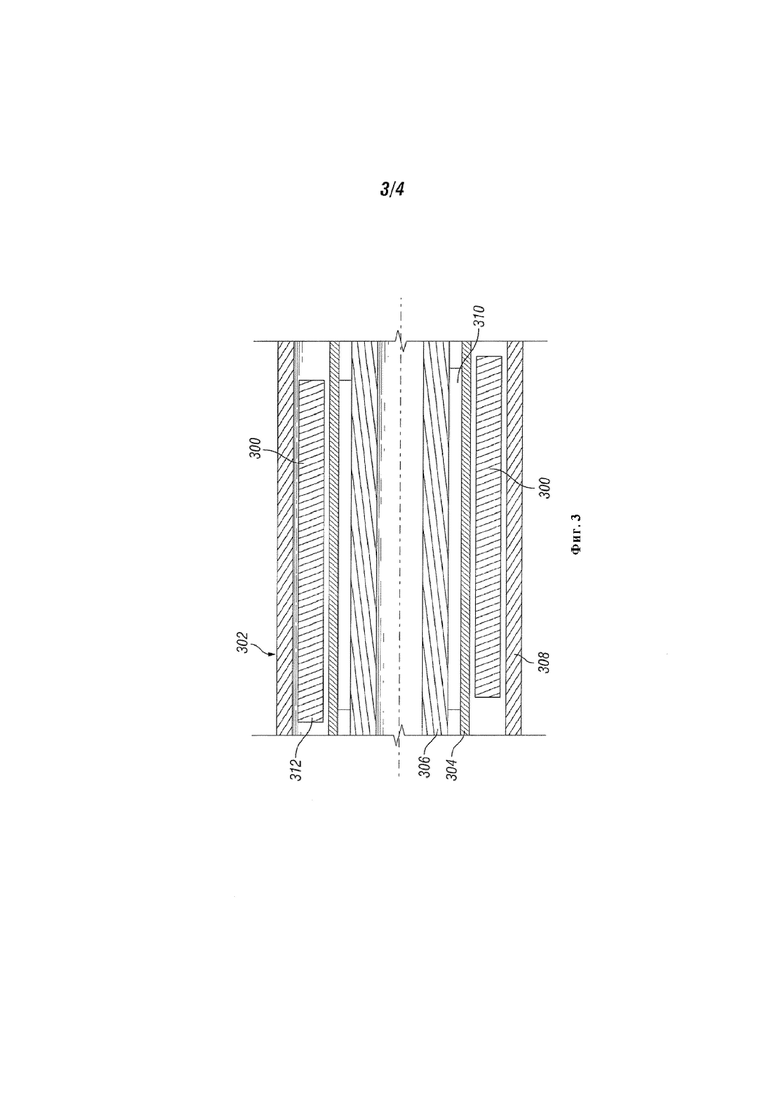
На Фиг. 3 представлена схема приведенных в качестве примера детекторов гамма-излучения 300 в корпусе 302, соответствующих аспектам настоящего изобретения. В показанном варианте реализации изобретения корпус 302 содержит внутреннюю муфту 304, вращательно присоединенную к приводному валу 306 РУС, и внешнюю муфту 308, вращательно присоединенную к внутренней муфте 304. Внутренняя муфта 304 может быть вращательно присоединена к приводному валу 306 посредством множества шлицов 310, сформированных на внутренней поверхности внутренней муфты 304 и внешней поверхности приводного вала 306. Внешняя муфта 308 может быть вращательно присоединена к внутренней муфте 304 посредством скоб (не показано) или любого другого соединительного механизма, что будет понятно специалисту в данной области техники при ознакомлении с настоящим описанием. Внутренняя муфта 304 и внешняя муфта 308 могут по меньшей мере частично образовывать по меньшей мере одну полость под давлением 312, в которой расположены детекторы гамма-излучения 300. В других вариантах реализации изобретения по меньшей мере одна полость под давлением 312 может содержать множество полостей под давлением, определенных частично свойствами внутреннего корпуса 304 и/или внешнего корпуса 308, в которых множество детекторов гамма-излучения 300 размещены с угловыми интервалами.
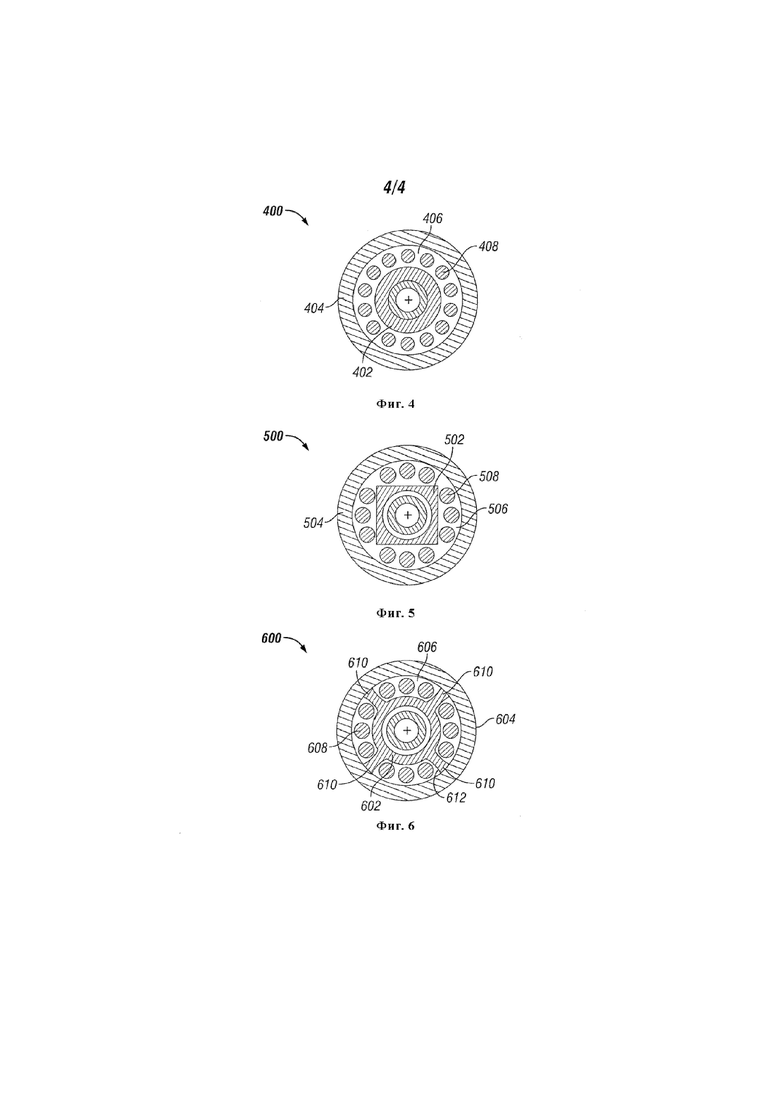
На Фиг. 4 представлена схема приведенного в качестве примера корпуса 400, содержащего внутреннюю муфту 402 и внешнюю муфту 404, соответствующего аспектам настоящего изобретения. В показанном варианте реализации изобретения как внутренняя муфта 402, так и внешняя муфта 404 имеют круглые сечения и действуют совместно, по меньшей мере частично создавая единственную кольцевую полость под давлением 406, в которой множество детекторов гамма-излучения 408 размещены с угловыми интервалами. Угловые интервалы могут содержать равномерные угловые интервалы, как показано. В других вариантах реализации изобретения угловые интервалы могут быть неравномерными, например, с детекторами 408, сгруппированными вместе с первым угловым интервалом, и группами детекторов 406, распределенными вокруг корпуса 400 со вторым угловым интервалом.
На Фиг. 5 представлена схема другого приведенного в качестве примера корпуса 500, содержащего внутреннюю муфту 502 и внешнюю муфту 504, соответствующего аспектам настоящего изобретения. В показанном варианте реализации изобретения внутренняя муфта 502 имеет квадратное сечение, а внешняя муфта 504 имеет круглое сечение. Внутренняя муфта 502 и внешняя муфта 504 также действуют совместно, создавая единственную полость под давлением 506, однако, полость имеет неравномерную форму благодаря квадратному сечению внутренней муфты 502. Благодаря неравномерной форме полости под давлением 506, детекторы гамма-излучения 508 могут быть разделены на группы, распределенные вокруг корпуса 500. Распределение групп и распределение детекторов 508 в группах может обеспечить улучшенное разрешение по направлению для измерений, выполняемых детекторами 508.
На Фиг. 6 представлена схема другого приведенного в качестве примера корпуса 600, содержащего внутреннюю муфту 602 и внешнюю муфту 604, соответствующего аспектам настоящего изобретения. В показанном варианте реализации изобретения внутренняя муфта 602 имеет множество ребер 610, расходящихся радиально от центра внутренней муфты 602. Ребра 610 могут быть расположены с равными угловыми интервалами вокруг внутренней муфты 602 или с любыми другими угловыми интервалами. В некоторых вариантах реализации изобретения ребра 610 могут контактировать с внешней муфтой 604 и герметично прилегать к ней, создавая множество полостей под давлением в корпусе 600. В других вариантах реализации изобретения, как показано, ребра 610 могут не прилегать герметично к внешней муфте 604, вместо этого создавая множество карманов внутри единственной полости под давлением 608.
Как и в корпусе, описанном со ссылкой на Фиг. 5, неравномерное распределение детекторов 608, вызванное наличием ребер 610, может обеспечить улучшенное разрешение по направлению для измерений, выполненных детекторами 608. В некоторых вариантах реализации изобретения внутренняя муфта 604 может содержать экранирующий или поглощающий гамма-излучение материал 612 для фокусировки угловой чувствительности и направленности детекторов 608. В показанном варианте реализации изобретения экранирующий или поглощающий гамма-излучение материал 612 нанесен тонким слоем на внешнюю поверхность внутренней муфты 602 так, чтобы угловая чувствительность каждой группы детекторов 608 была направлена наружу, в сторону от экранирующего или поглощающего гамма-излучение материала 612. Приведенные в качестве примера экранирующие или поглощающие гамма-излучение материалы включают материалы с высокой электронно-массовой плотностью, такие как свинец, который может быть нанесен тонким слоем без значительного уменьшения промежутка для детекторов в корпусе, и экранирование класса Z - многослойные материалы, состоящие из материалов с плотностью, плавно изменяющейся от высокой до низкой. Аналогичное экранирование гамма-излучения может быть использовано с любыми вариантами реализации изобретения, описанными в данном документе, включая применение экранирования гамма-излучения к любым конфигурациям внутренней и/или внешней муфты, описанным в данном документе. Кроме того, экранирование гамма-излучения может быть применено в коротких угловых сегментах на внутренней и/или внешней муфте для повышения угловой чувствительности получаемых измерений.
Хотя варианты реализации корпуса, описанные выше, включают различные поперечные сечения и свойства внутренней муфты, способствующие угловой направленности измерений детекторов гамма-излучения, такие поперечные сечения и свойства могут также относиться к внешней муфте. Например, ребра 610 на Фиг. 6 могут быть сформированы на внутренней поверхности внешней муфты 604, а не на внешней поверхности внутренней муфты 602. Кроме того, отдельные элементы, такие как отдельно сформированные ребра, могут быть вставлены между внутренней и внешней муфтой.
Во время работы РУС, аналогичная описанным выше, может располагаться внутри подземного пласта, где измерения могут проводиться детекторами гамма-излучения. Измерения могут проводиться, например, во время вращения детекторов гамма-излучения с приводным валом или когда приводной вал временно останавливается, и детекторы гамма-излучения неподвижны. Результаты таких измерений могут приниматься блоком управления, связанным с детекторами гамма-излучения, наряду с информацией о положении, и обрабатываться и/или накапливаться блоком управления и передаваться в систему обработки информации на поверхности через телеметрическую систему, присоединенную к РУС. Система обработки информации на поверхности может определять одну или более характеристик пласта по меньшей мере частично на основании полученных результатов измерений. Приведенные в качестве примера характеристики пласта включают тип породы в пласте, непосредственно окружающей буровое долото, присоединенное к РУС, которая может использоваться для определения границ пласта и путей управления буровым долотом. В других вариантах реализации изобретения результаты измерений могут передаваться в отдельный блок управления в переделах РУС, который может определять одну или более характеристик пласта по меньшей мере частично на основании полученных результатов измерений и принимать автоматические управляющие решения по меньшей мере частично на основании определенной характеристики пласта.
В некоторых вариантах реализации изобретения результаты измерений, генерируемые детекторами гамма-излучения, могут содержать результаты множества измерений гамма-излучения. Множество результатов измерений гамма-излучения может генерироваться в то время, как детекторы гамма-излучения вращаются или не вращаются с приводным валом. Каждый детектор гамма-излучения может определять гамма-излучение, излучаемое пластом во всех угловых ориентациях относительно приводного вала. Результаты измерений от каждого из множества детекторов гамма-излучения могут накапливаться для определения итогового или среднего результата измерений гамма-излучения для определенной глубины пласта. Итоговый или средний результат измерений гамма-излучения может быть использован для определения тенденций в уровне излучения в РУС, которые могут указывать на изменение состава пласта рядом с буровым долотом, требующее остановки или изменения направления бурения. Кроме того, это может указывать на необходимость проведения направленных измерений, описанных ниже, чтобы определить, относится ли повышение уровня радиации ко всему пласту в этом диапазоне глубины или к источнику излучения, расположенному в определенной угловой ориентации относительно РУС, что может иметь место, например, когда буровое долото находится близко к границе пласта.
В некоторых вариантах реализации изобретения направленные измерения могут проводиться детекторами гамма-излучения как во время вращения детекторов гамма-излучения с приводным валом, так и во время временной остановки детекторов гамма-излучения. Во время временной остановки результаты измерений детекторов гамма-излучения могут быть соотнесены с данными датчика положения для определения угловой ориентации вокруг приводного вала, соответствующей результатам измерений гамма-излучения. Угловые ориентации могут быть разделены на «сегменты», каждый из которых соответствует диапазону угловой ориентации относительно приводного вала. Размер сегментов/диапазон угловой ориентации может быть произвольным или может зависеть частично от направленности детекторов гамма-излучения, присоединенных к приводному валу. Например, каждый сегмент может охватывать сектор 90°, окружающий РУС, в соответствии с конфигурацией Фиг. 6, в которой детекторы гамма-излучения разделены на четыре кармана с равным пространством вокруг корпуса. Возможны другие размеры сегментов, в том числе неравномерные сегменты. Аналогичные технологии деления на сегменты могут быть использованы во время вращения детекторов гамма-излучения. Однако в этих случаях задержка времени между отправкой и приемом гамма-излучения и скорость вращения детектора гамма-излучения может искажать соответствие между угловой ориентацией, в которой излучалось гамма-излучение, и угловой ориентацией детекторов гамма-излучения, когда гамма-излучение регистрировалось. Соответственно, угловая ориентация измерений гамма-излучения может корректироваться перед тем, как они будут связаны с определенным сегментом.
В соответствии с аспектами данного изобретения, приведенное в качестве примера устройство содержит внешний корпус и приводной вал, который по меньшей мере частично находится внутри внешнего корпуса и вращательно независим от него. Буровое долото может быть присоединено к приводному валу. По меньшей мере один детектор гамма-излучения может быть вращательно присоединен к приводному валу внутри внешнего корпуса. В некоторых вариантах реализации изобретения устройство дополнительно содержит корпус, вращательно присоединенный к приводному валу, причем корпус содержит по меньшей мере одну полость под давлением; и по меньшей мере один детектор гамма-излучения расположен внутри по меньшей мере одной полости под давлением.
В некоторых вариантах реализации изобретения корпус содержит внутреннюю муфту, вращательно присоединенную к приводному валу, и внешнюю муфту, вращательно присоединенную к внутренней муфте; а внутренняя муфта и внешняя муфта по меньшей мере частично образуют по меньшей мере одну полость под давлением. В некоторых вариантах реализации изобретения внутренняя муфта имеет по меньшей мере одно круглое и/или квадратное поперечное сечение. В некоторых вариантах реализации изобретения внутренняя муфта и внешняя муфта по меньшей мере частично образуют множество полостей под давлением, расположенных с угловыми интервалами вокруг корпуса.
В любом из вариантов реализации изобретения, описанных в двух предыдущих параграфах, по крайней мере одно из: внутренняя муфта или внешняя муфта может содержать материал, экранирующий гамма-излучение. В любом из вариантов реализации изобретения, описанных в двух предыдущих параграфах, корпус может быть вращательно присоединен к приводному валу посредством шлицов. В любом из вариантов реализации изобретения, описанных в двух предыдущих параграфах, по меньшей мере один детектор гамма-излучения может содержать множество детекторов гамма-излучения, расположенных с угловым интервалом внутри корпуса, и ориентированных параллельно продольной оси внешнего корпуса. В любом из вариантов реализации изобретения, описанных в двух предыдущих параграфах, по меньшей мере один из: блок управления, источник питания или датчик положения, связанный по меньшей мере с одним детектором, может быть присоединено к корпусу. В любом из вариантов реализации изобретения, описанных в двух предыдущих параграфах, по меньшей мере один детектор гамма-излучения может содержать по меньшей мере одно из: счетчик Гейгера-Мюллера или сцинтиллирующий кристалл, присоединенный к оптическому датчику.
В соответствии с аспектами данного изобретения, приведенный в качестве примера способ включает позиционирование роторной управляемой системы (РУС) внутри подземного пласта, причем роторная управляемая система содержит приводной вал, который по меньшей мере частично находится внутри внешнего корпуса и вращательно независим от него. Результаты измерений, проводимых по меньшей мере одним детектором гамма-излучения, вращательно присоединенным к приводному валу внутри внешнего корпуса, могут приниматься, и характеристика пласта может определяться по меньшей мере частично на основании принятых результатов измерений. В некоторых вариантах реализации изобретения получение результатов измерений, проводимых по меньшей мере одним детектором гамма-излучения, вращательно присоединенным к приводному валу внутри внешнего корпуса, включает получение результатов измерений, проводимых множеством детекторов гамма-излучения, расположенных внутри по меньшей мере одной полости под давлением в корпусе, вращательно присоединенном к приводному валу. В некоторых вариантах реализации изобретения корпус содержит внутреннюю муфту, вращательно присоединенную к приводному валу, и внешнюю муфту, вращательно присоединенную к внутренней муфте; а внутренняя муфта и внешняя муфта по меньшей мере частично образуют по меньшей мере одну полость под давлением.
В любом из вариантов реализации изобретения, описанных в предыдущем параграфе, получение результатов измерений, проведенных по меньшей мере одним детектором гамма-излучения, вращательно присоединенным к приводному валу, может включать получение результатов измерений, проводимых по меньшей мере одним детектором гамма-излучения во время вращения приводного вала. В некоторых вариантах реализации изобретения измерение включает измерения, проведенные по меньшей мере одним детектором гамма-излучения во всех угловых ориентациях относительно приводного вала. В некоторых вариантах реализации изобретения определение характеристики пласта по меньшей мере частично на основании полученных результатов измерений включает определение итогового или среднего результата измерений, связанных с глубиной пласта, на которой были проведены измерения. В некоторых вариантах реализации изобретения определение характеристик пласта по меньшей мере частично на основании полученных результатов измерений включает разделение измерений на множество сегментов, каждый из которых охватывает диапазон угловых ориентаций, окружающих РУС. В некоторых вариантах реализации изобретения разделение измерений на множество сегментов, каждый из которых охватывает диапазон угловых ориентаций, окружающих РУС, включает коррекцию результата каждого измерения по меньшей мере частично на основании скорости вращения по меньшей мере одного детектора гамма-излучения.
В любом из вариантов реализации изобретения, описанных в двух предыдущих параграфах, получение результатов измерений, проведенных по меньшей мере одним детектором гамма-излучения, вращательно присоединенным к приводному валу, может включать получение результатов измерений, проведенных по меньшей мере одним детектором гамма-излучения, когда приводной вал не вращается. В некоторых вариантах реализации изобретения определение характеристики пласта по меньшей мере частично на основании полученных результатов измерений включает по меньшей мере одно из: разделение измерений на множество сегментов, каждый из которых охватывает диапазон угловых ориентаций, окружающих РУС, и/или определение итогового или среднего результата измерений, связанного с глубиной пласта, на которой были проведены измерения.
Следовательно, настоящее изобретение хорошо подходит для достижения упомянутых целей и преимуществ, а также таковых, связанных с ними. Частные варианты реализации, описанные ранее, являются только иллюстративными, так как настоящее изобретение может быть модифицировано и реализовано другими, но эквивалентными способами, понятными специалистам в данной области техники, у которых есть возможность ознакомиться с настоящим описанием. Кроме того, описанные в контексте настоящего изобретения подробности конструкции или дизайна не предполагают ограничения, за исключением описанных ниже в формуле изобретения. Таким образом, следует понимать, что частные иллюстративные варианты реализации, раскрытые ранее, могут быть изменены или модифицированы, при этом все такие изменения находятся в пределах объема и сущности настоящего изобретения. Кроме того, термины в формуле изобретения использованы в их простом, обычном значении, если обратное явным образом не указано заявителем. Под использованной в формуле изобретения формой единственного числа следует понимать один или большее количество элементов, если контекст не указывает иного. Кроме того, термины «соединять» или «соединяемый» или любые распространенные варианты, применяемые в подробном описании или формуле изобретения, не предназначены для ограничения лишь прямым соединением. Наоборот, два элемента могут быть соединены косвенно и по-прежнему рассматриваться как соединенные в рамках объема подробного описания и формулы изобретения.
Изобретение относится к бурению скважин, в частности к устройствам регистрации гамма-излучения. Предложено устройство вращающейся секции роторной управляемой системы, содержащее: внешний корпус; приводной вал, находящийся по меньшей мере частично внутри внешнего корпуса и вращательно независимый от внешнего корпуса; буровое долото, присоединенное к приводному валу; и по меньшей мере один детектор гамма-излучения, вращательно присоединенный к приводному валу внутри внешнего корпуса. Причем по меньшей мере один детектор гамма-излучения измеряет гамма-излучение, излучаемое пластом в одном или более угловых ориентациях относительно приводного вала. Раскрыт также способ гамма-каротажа с использованием указанного устройства. Предложенное изобретение позволяет увеличить угловую чувствительность получаемых измерений. 2 н. и 18 з.п. ф-лы, 6 ил.
1. Устройство вращающейся секции роторной управляемой системы, содержащее:
внешний корпус;
приводной вал, находящийся по меньшей мере частично внутри внешнего корпуса и вращательно независимый от внешнего корпуса;
буровое долото, присоединенное к приводному валу; и
по меньшей мере один детектор гамма-излучения, вращательно присоединенный к приводному валу внутри внешнего корпуса, причем по меньшей мере один детектор гамма-излучения измеряет гамма-излучение, излучаемое пластом в одном или более угловых ориентациях относительно приводного вала.
2. Устройство по п. 1, дополнительно содержащее корпус, вращательно присоединенный к приводному валу, в котором
корпус содержит по меньшей мере одну полость под давлением; и
по меньшей мере один детектор гамма-излучения расположен внутри по меньшей мере одной полости под давлением.
3. Устройство по п. 2, отличающееся тем, что
корпус содержит внутреннюю муфту, вращательно присоединенную к приводному валу, и внешнюю муфту, вращательно присоединенную к внутренней муфте; и
внутренняя муфта и внешняя муфта по меньшей мере частично образуют по меньшей мере одну полость под давлением.
4. Устройство по п. 3, отличающееся тем, что внутренняя муфта имеет по меньшей мере одно из: круглое или квадратное поперечное сечение.
5. Устройство по п. 3, отличающееся тем, что внутренняя муфта и внешняя муфта по меньшей мере частично образуют множество полостей под давлением, расположенных с угловыми интервалами вокруг корпуса.
6. Устройство по любому из пп. 3-5, отличающееся тем, что по меньшей мере одно из: внутренняя гильза или внешняя гильза, содержит материал, экранирующий гамма-излучение.
7. Устройство по любому из пп. 2-5, отличающееся тем, что корпус вращательно присоединен к приводному валу посредством шлицов.
8. Устройство по любому из пп. 2-5, отличающееся тем, что по меньшей мере один детектор гамма-излучения содержит множество детекторов гамма-излучения, расположенных с угловыми интервалами внутри корпуса и ориентированных параллельно продольной оси внешнего корпуса.
9. Устройство по любому из пп. 2-5, отличающееся тем, что по меньшей мере один из: блок управления, источник питания или датчик положения, связанные по меньшей мере с одним детектором, присоединен к корпусу.
10. Устройство по любому из пп. 2-5, отличающееся тем, что по меньшей мере один детектор гамма-излучения содержит по меньшей мере один из: счетчик Гейгера-Мюллера или сцинтиллирующий кристалл, присоединенный к оптическому датчику.
11. Способ гамма-каротажа с использованием вращающейся секции роторной управляемой системы по п. 1, включающий этапы, на которых:
позиционируют роторную управляемую систему (РУС) внутри подземного пласта, причем роторная управляемая система содержит приводной вал, который по меньшей мере частично находится внутри внешнего корпуса и вращательно независим от внешнего корпуса;
проводят измерения с помощью по меньшей мере одного детектора гамма-излучения, соединенного с возможностью вращения с приводным валом внутри внешнего корпуса, причем по меньшей мере один детектор гамма-излучения измеряет гамма-излучение, излучаемое пластом в одном или более угловых ориентациях относительно приводного вала;
получают результаты измерений, проведенных по меньшей мере одним детектором гамма-излучения,
определяют характеристику пласта, основанную по меньшей мере частично на полученных результатах измерений.
12. Способ по п. 11, отличающийся тем, что получение результатов измерений, проведенных по меньшей мере одним детектором гамма-излучения, вращательно прикрепленным к приводному валу внутри внешнего корпуса, включает этап, на котором получают результаты измерений, проведенных множеством детекторов гамма-излучения, расположенных внутри по меньшей мере одной полости под давлением в корпусе, вращательно прикрепленном к приводному валу.
13. Способ по п. 12, отличающийся тем, что
корпус содержит внутреннюю муфту, вращательно присоединенную к приводному валу, и внешнюю муфту, вращательно присоединенную к внутренней муфте; и
внутренняя муфта и внешняя муфта по меньшей мере частично образуют по меньшей мере одну полость под давлением.
14. Способ по любому из пп. 11-13, отличающийся тем, что получение результатов измерений, проведенных по меньшей мере одним детектором гамма-излучения, вращательно присоединенным к приводному валу, включает этап, на котором получают результаты измерений, проведенных по меньшей мере одним детектором гамма-излучения во время вращения приводного вала.
15. Способ по п. 14, отличающийся тем, что измерение включает измерения, проведенные по меньшей мере одним детектором гамма-излучения во всех угловых ориентациях относительно приводного вала.
16. Способ по п. 15, отличающийся тем, что определение характеристики пласта, основанное по меньшей мере частично на полученных результатах измерений, включает этап, на котором определяют итоговый или средний результаты измерений, связанные с глубиной пласта, на которой были проведены измерения.
17. Способ по п. 15, отличающийся тем, что определение характеристики пласта, основанное по меньшей мере частично на полученном результате измерения, включает разделение измерений на множество сегментов, каждый из которых охватывает диапазон угловых ориентаций, окружающих РУС.
18. Способ по п. 17, отличающийся тем, что разделение измерений на множество сегментов, каждый из которых охватывает диапазон угловых ориентаций, окружающих РУС, включает коррекцию результата каждого измерения, основанную по меньшей мере частично на скорости вращения по меньшей мере одного детектора гамма-излучения.
19. Способ по любому из пп. 11-13, отличающийся тем, что получение результатов измерений, проведенных по меньшей мере одним детектором гамма-излучения, вращательно прикрепленным к приводному валу, включает получение результатов измерений, проведенных по меньшей мере одним детектором гамма-излучения, пока приводной вал не вращается.
20. Способ по п. 19, отличающийся тем, что определение характеристики пласта, основанное по меньшей мере частично на полученных результатах измерений, включает по меньшей мере одно из:
разделение измерений на множество сегментов, каждый из которых охватывает диапазон угловых ориентаций, окружающих РУС; или
определение итогового или среднего результата измерения, связанного с глубиной пласта, на которой были проведены измерения.
| US 5448227 A1, 05.09.1995 | |||
| US 20110120775 A1, 26.05.2011 | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| СПОСОБ БУРЕНИЯ СКВАЖИНЫ И ОДНОВРЕМЕННОГО НАПРАВЛЕНИЯ БУРОВОЙ КОРОНКИ АКТИВНО УПРАВЛЯЕМОЙ ВРАЩАТЕЛЬНОЙ НАПРАВЛЯЕМОЙ БУРОВОЙ СИСТЕМОЙ И АКТИВНО УПРАВЛЯЕМАЯ ВРАЩАТЕЛЬНАЯ НАПРАВЛЯЕМАЯ СИСТЕМА | 1999 |
|
RU2239042C2 |
| US 20100126770 A1, 27.05.2010 | |||
| УПРАВЛЯЕМЫЙ РОТОРНЫЙ ИНСТРУМЕНТ | 2007 |
|
RU2435015C2 |
| US 20100126770 A1, 27.05.2010. | |||

