Изобретение относится к области авиации, в частности к парашютным посадочно-навигационным системам и может быть использовано для доставки парашютиста или груза в точку посадки.
Известна система отображения навигационных данных для парашютиста (WO 2010132133 А1, дата приоритета 12.11.2010), раскрывающая систему отображения навигационных данных для парашютиста на основе дисплея, включающего в себя значки, представляющие парашютиста и цель. Парашютист направляется на цель через окружности, обычно эксцентричные, которые центрированы на трехмерной линии, рассчитанной на основе скорости снижения и скорости ветра. Радиусы кругов для разных высот, отображаемые для парашютиста, указывают границу трехмерного объема (обозначенного в источнике как «навигационная воронка»), в пределах которого парашютист достигнет выбранной цели. Ситуационный статус парашютиста может быть отображен с использованием цветов или символов в кругах на дисплее.
Основным недостатком раскрытой в указанном источнике информации системы навигации в сравнении с решением, охарактеризованным в заявке, является отсутствие управляющих командных сигналов в дополнение к индикации положения, а также использование при расчете траектории снижения только одной опорной точки, в частности, предполагаемой точки посадки на земле, что не соответствует алгоритму, процедуре и методике парашютирования на парашютных системах типа «крыло» и подразумевает выведение парашютиста в район приземления с непременным установлением визуального контакта с целью (точкой приземления), а это, в свою очередь, повышает критический уровень требований к погодным условиям по параметрам количества облаков, нижней границы облачности и дальности видимости на высоте осуществления маневра приземления в зоне посадки.
Очевидно, что максимальный эффект в повышении точности доставки парашютной системы в точку посадки может быть достигнут благодаря использованию дополнительной опорной точки, от которой строится конус приземления.
Таким образом, недостатком приведенной выше системы посадки является несоответствие процедуре и методике парашютирования на парашютных системах типа «крыло» и отсутствие управляющих командных сигналов.
Технической задачей, на решение которой направлено заявляемое изобретение, является повышение точности доставки парашютной системы в точку посадки вне зависимости от метеоусловий в зоне выброски, а также приведение в соответствие навигационных алгоритмов, процедуре и методике парашютирования на парашютных системах типа «крыло», и автоматическое наведение в заданную точку приземления с обеспечением минимально возможной горизонтальной скорости приземления.
Поставленная техническая задача решается тем, что при исполнении доставки подвесной парашютной системы в точку посадки, производится динамический расчет конуса посадки от точки посадки на основании параметров парашютной системы и метеорологических условий, путем определения радиуса окружности в зависимости от высоты, из которой парашютная система может попасть в точку посадки. Следующим шагом производится определение точки базы на окружности конуса посадки, который согласно методике ограничивается высотой, на которой осуществляется разворот против ветра и прицельное снижение в цель (точку приземления), таким образом, чтобы точка была максимально удаленной от центра окружности конуса посадки в направлении, противоположном прогнозируемому направлению ветра у земли, с учетом понижающего коэффициента, соответствующего среднему режиму движения парашюта. Динамический расчет конуса снижения (навигации) от точки базы производится на основании параметров парашютной системы и метеорологических условий, путем определения радиуса окружности в зависимости от высоты над точкой базы, из которой парашютная система может попасть в точку базы. Доставка подвесной системы парашюта в точку посадки производится на основании полученных конуса посадки и конуса снижения (навигации).
В дополнительном варианте изобретения расчет конуса снижения может проводиться динамически (многократно), при этом в качестве точки базы для расчета первого после конуса посадки, конуса снижения является максимально удаленная от центра окружности в направлении, противоположном направлению ветра у земли, с учетом понижающего коэффициента, соответствующего среднему режиму движения парашюта, точка, а для расчета последующих конусов снижения в качестве точки базы используют максимально удаленные от центра окружности точки, расположенные на любом радиусе окружности с учетом выбранного понижающего коэффициента.
Для специалиста, сведущего в уровне техники, очевидно, что подвесная система парашюта может представлять собой механизированную систему управления куполом использующую полученные навигационные данные в виде конуса снижения и конуса посадки для автоматической корректировки курса снижения к точке посадки с использованием управляющих команд.
Также очевидно, что конус снижения и конус посадки могут быть выведены на информационный дисплей парашютиста, закрепленный, например, на запястье, на шлеме, встроенном в визор или любым другим способом. В таком случае, парашютист осуществляют посадку, ориентируясь на информационные данные, полученные с дисплея, управляя куполом парашюта самостоятельно.
Также передача навигационной информации о конусе посадки и конусе снижения парашютисту возможна, при помощи звуковых и/или тактильных сигналов, сообщающих парашютисту его положение относительно границ конуса посадки и конуса снижения и рекомендуемое направление разворота.
Техническим результатом, на который направлено изобретение, является повышение точности навигации подвесной парашютной системы в процессе полета в зону приземления, а также осуществление инструментального приземления в точку посадки с обеспечением информации точного положения парашютиста относительно заданной траектории посадки, для обеспечения посадки в соответствии с методикой, вне зависимости от метеоусловий.
Указанный технический результат достигается тем, что система доставки подвесной парашютной системы в точку посадки включает управляемую парашютную систему, прибор навигации, включающий в себя, по меньшей мере, акселерометр, гироскоп, магнитометр, барометр, память, содержащую исполняемые по меньшей мере одним процессорным устройством инструкции, которые при их исполнении, по меньшей мере, одним процессорным устройством, побуждают прибор навигации выполнять навигацию парашютной системы путем расчета конуса снижения и конуса посадки.
Настоящее изобретение подтверждается описанными ниже конкретными примерами реализации, взаимосвязанными с чертежами, на которые далее имеются отсылки для визуальной демонстрации принципов работы и функционирования заявленного изобретения, которые не призваны ограничивать сущность заявленного изобретения, а лишь обозначить графическое представление некоторых аспектов.
Для более точного понимания сущности заявленного изобретения, дальнейшее раскрытие примеров реализации заявленного изобретения, из которого специалисту станут очевидны указанные выше и иные преимущества заявленного изобретения, изложено в том числе со ссылкой на позиции, обозначенные на чертежах.
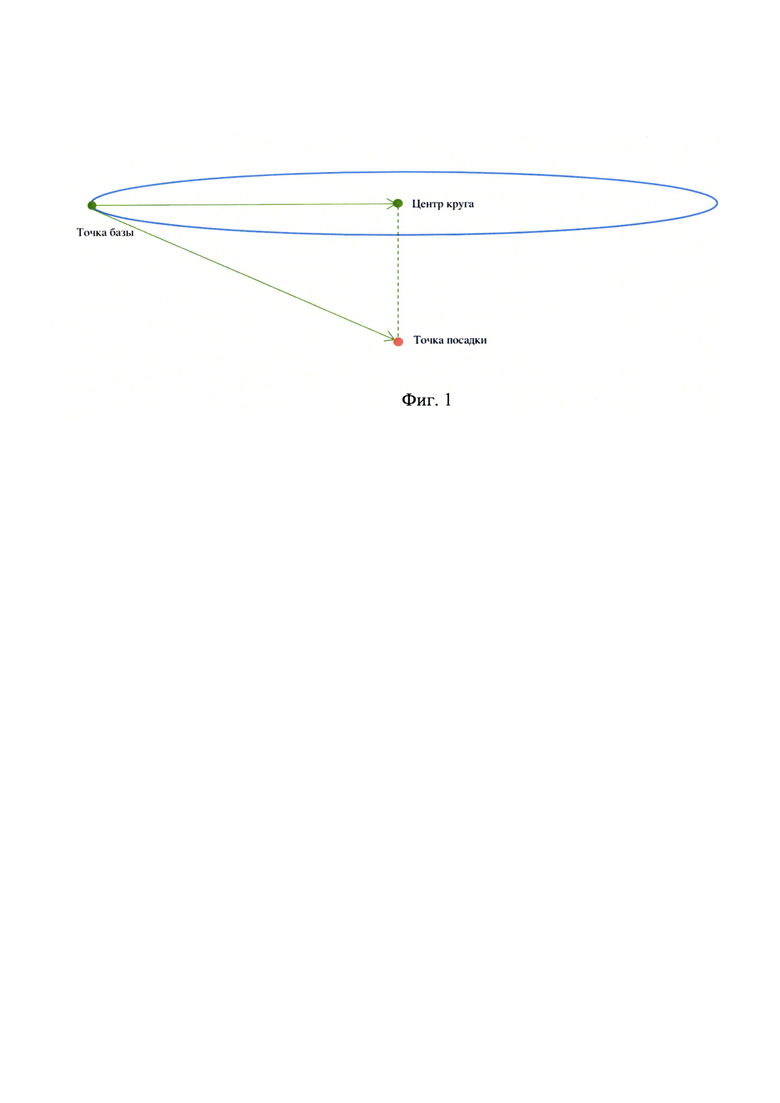
Фиг. 1 - Пример конуса посадки под действием векторов скоростей горизонтального и вертикального движения парашютиста без ветра.
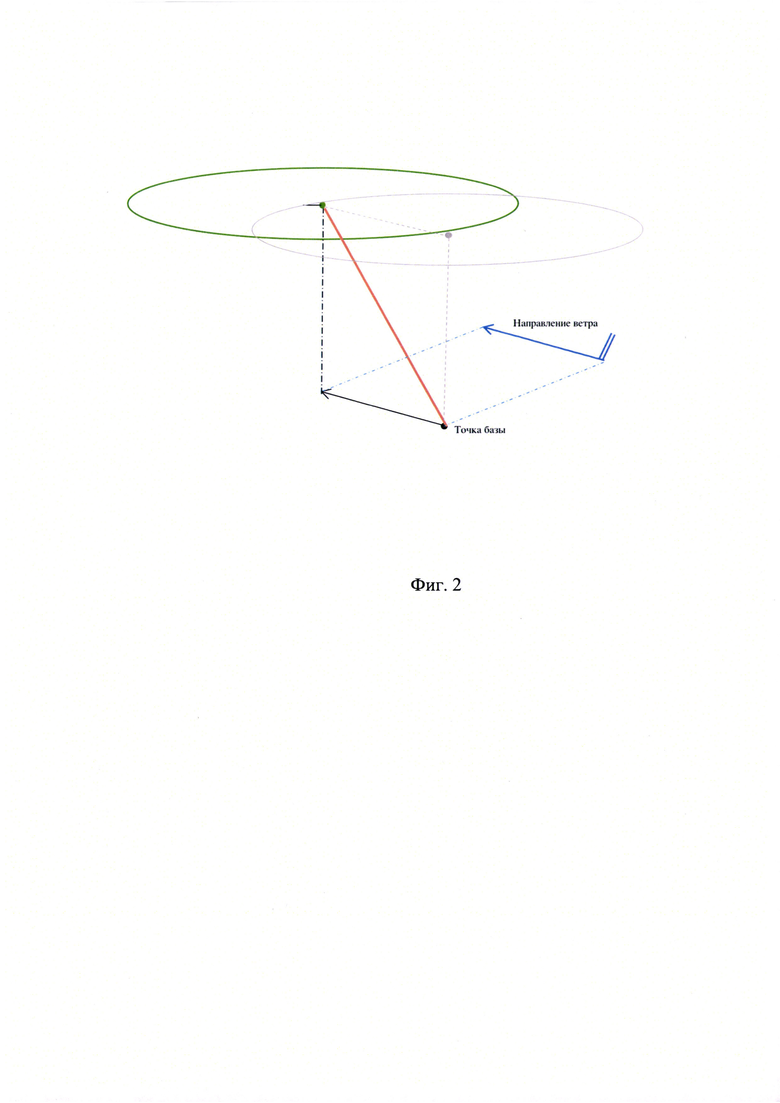
Фиг. 2 - Пример смещения конуса под влиянием ветра.
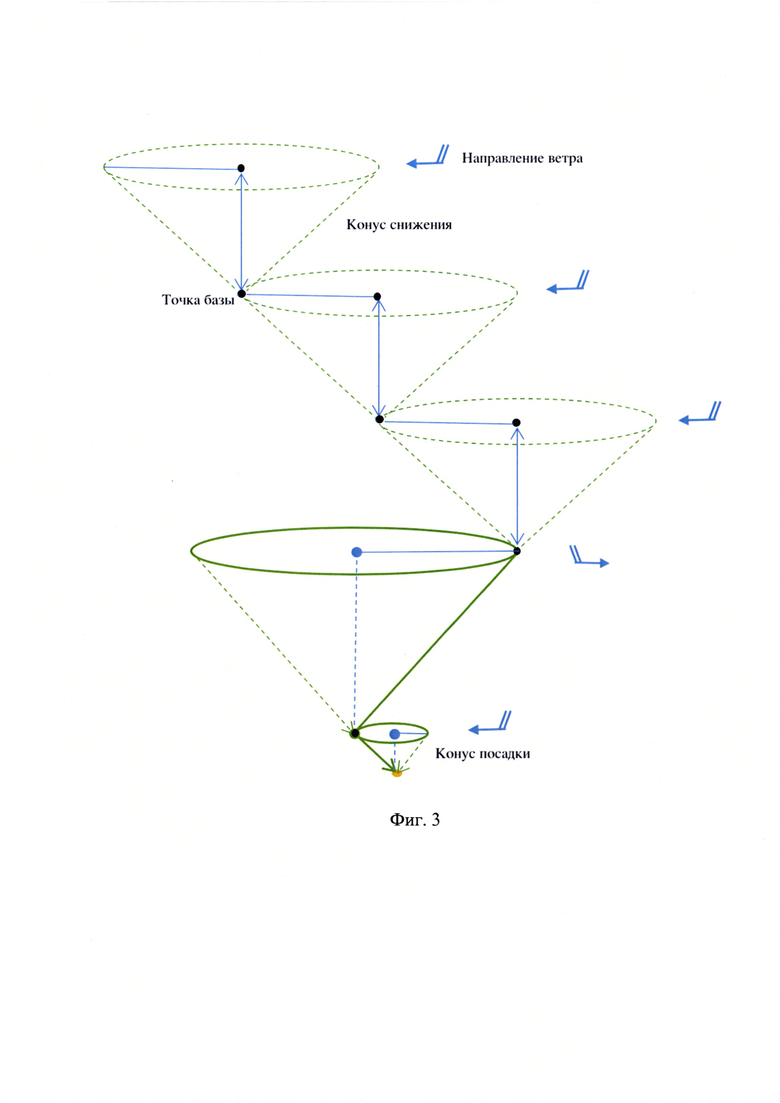
Фиг. 3 - Пример использования модели с многократным расчетом конусов снижения.
Для более точного изложения сущности заявленного изобретения, необходимо принимать во внимание терминологию, используемую в настоящем описании далее, а именно необходимо обозначить такие основные термины, как:
Точка базы - опорная точка, от которой строится модель конуса до какого-либо уровня истинной (относительной) высоты. Опорной точкой для конуса посадки является точка приземления, опорной точкой для конуса снижения (навигации) является точка начала прицеливания для посадки и т.д.
Глиссада - траектория полета парашютиста, по которой он снижается, под действием горизонтального и вертикального векторов скоростей движения. Глиссада определяется аэродинамическими характеристиками парашютной системы, а именно качеством или коэффициентом скольжения. Предельной глиссадой является точка в горизонтальной плоскости парашютирования, максимально удаленная от центра, от которой, двигаясь по радиусу к центру, за время снижения с высоты парашютирования до высоты опорной точки парашютист придет к опорной точке.
Конус - пространственная фигура, находясь внутри которой обеспечивается посадка парашютиста в заданную точку. Объем конуса является геометрическим местом точек совокупности возможных глиссад. Сечение конуса плоскостью на любой высоте образует круг. Центр круга является проекцией точки приземления на высоту парашютирования.
Первой опорной точкой для определения конуса посадки является точка приземления парашютиста на поверхности приземления. Конус от нее ограничивается высотой, на которой начинается маневр прицеливания в точку приземления, например, 100 метров, в плоскости которой образован круг заданной глиссады.
На этом круге, на противоположной прогнозируемому ветру, стороне располагается точка базы, с учетом понижающего коэффициента, соответствующего среднему режиму полета парашюта, которая является точкой начала маневра захода на посадку;
Конус снижения (навигации) начинается в точке базы и поднимается до высоты переходных условий - начала снижения под основным куполом, на которой образуется круг заданной глиссады с понижающим коэффициентом, обеспечивающим заданные критерии безопасности.
На этом круге, в точке пересечения с вектором среднего ветра, располагается точка начала снижения под основным куполом, наиболее выгодная для решения задачи максимально дальнего полета.
Как указано выше, для одного из дополнительных вариантов изобретения, последующие конуса снижения начинаются в точке базы предыдущего конуса снижения и поднимаются до высоты, зависящей от предзаданной точности снижения.
Центр круга в плоскости высоты парашютирования для штилевых условий является проекцией точки приземления на высоту парашютирования. Под влиянием ветра на различных высотах происходит смещение центра круга по линии ветра в горизонтальной плоскости. Расчет координат линии смещения центра круга от высоты парашютирования до точки базы производится на основе прогноза скоростей ветра и прогноза скорости снижения парашютиста на различных высотах.
Следует осознавать, что описание выше призвано раскрывать, а не ограничивать сущность изобретения указанным примером реализации.
Специалистам в уровне техники станут очевидны и иные варианты реализации изобретения, как это следует из формулы изобретения, полным однозначным подтверждением которой является описание и чертежи, сопутствующие настоящему документу.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗОНЫ ДОСЯГАЕМОСТИ ПАРАШЮТИСТОМ ЦЕЛЕВОЙ ТОЧКИ ПРИЗЕМЛЕНИЯ | 2019 |
|
RU2705928C1 |
| АВТОМАТИЗИРОВАННАЯ ПАРАШЮТНАЯ СИСТЕМА ДОСТАВКИ ГРУЗОВ | 2021 |
|
RU2761675C1 |
| МОДУЛЬНАЯ ИНФОРМАЦИОННАЯ СИСТЕМА ПАРАШЮТИСТА | 2018 |
|
RU2681241C1 |
| СПОСОБ КОМПЛЕКСНОЙ ПОДГОТОВКИ ПАРАШЮТИСТОВ | 2014 |
|
RU2570028C1 |
| Способ и система приземления парашютиста | 2017 |
|
RU2671896C1 |
| Способ наземной отработки элементов парашютной подготовки и устройство, его реализующее | 2023 |
|
RU2832674C2 |
| Многокупольная крыльевая система | 2020 |
|
RU2770501C2 |
| Способ подготовки парашютистов и устройство его реализующее | 2019 |
|
RU2730759C1 |
| ПАРАШЮТНЫЙ ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ К ПРЫЖКАМ НА ВОДУ | 2017 |
|
RU2655230C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ МЯГКОЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2400410C1 |
В изобретении охарактеризован способ доставки подвесной парашютной системы в точку посадки, который реализует динамический расчет конуса посадки от точки посадки на основании параметров парашютной системы и метеорологических условий, путем определения радиуса окружности, из которой парашютная система может попасть в точку посадки по высоте над точкой посадки, с учетом понижающего коэффициента глиссады, затем производят определение точки базы на конечной окружности конуса посадки таким образом, чтобы точка была максимально удаленной от центра окружности конуса посадки в направлении, противоположном прогнозируемому направлению ветра, динамический расчет конуса снижения от точки базы на основании параметров парашютной системы и метеорологических условий путем определения радиуса окружности, из которой парашютная система может попасть в точку базы по высоте над точкой базы, доставка подвесной системы парашюта в точку посадки на основании полученных конуса посадки и конуса снижения. Техническим результатом заявленного изобретения является повышение точности навигации и снижение горизонтальной скорости приземления подвесной парашютной системы в процессе полета в точку посадки вне зависимости от метеоусловий. 6 з.п. ф-лы, 3 ил.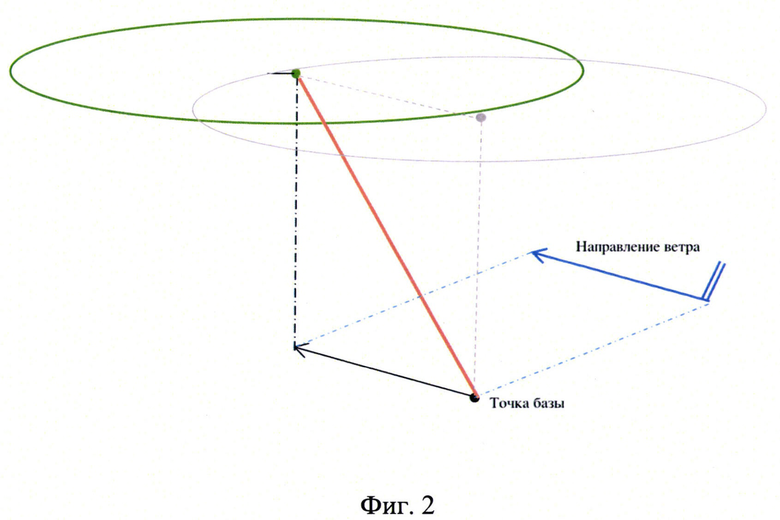
1. Способ доставки подвесной парашютной системы в точку посадки, при котором производится:
динамический расчет конуса посадки от точки посадки на основании параметров парашютной системы и метеорологических условий путем определения радиуса окружности, из которой парашютная система может попасть в точку посадки по высоте над точкой посадки, с учетом понижающего коэффициента глиссады
определение точки базы на конечной окружности конуса посадки таким образом, чтобы точка была максимально удаленной от центра окружности конуса посадки в направлении, противоположном прогнозируемом направлению ветра с учетом понижающего коэффициента, соответствующего среднему режиму полета парашюта
динамический расчет конуса снижения от точки базы на основании параметров парашютной системы и метеорологических условий путем определения радиуса окружности, из которой парашютная система может попасть в точку базы на высоте начала маневра прицеливания для точного приземления,
доставка подвесной системы парашюта в точку посадки на основании полученных конуса посадки и конуса снижения.
2. Способ по п. 1, при котором динамический расчет конуса снижения производится многократно, при этом точкой базы для расчета первого после конуса посадки конуса снижения является максимально удаленная от центра окружности в направлении, противоположном направлению ветра у земли, с учетом понижающего коэффициента, соответствующего среднему режиму движения парашюта, точка, а для расчета последующих конусов снижения в качестве точки базы используют максимально удаленные от центра окружности точки, расположенные на любом радиусе окружности с учетом выбранного понижающего коэффициента.
3. Способ по п. 1, при котором подвесная система парашюта представляет собой механизированную систему управления куполом.
4. Способ по п. 2, при котором управление куполом механизированной системой осуществляется на основании навигации по конусу посадки и конусу снижения.
5. Способ по п. 1, при котором осуществляется доставка парашютиста в точку посадки.
6. Способ по п. 4, при котором окружность конуса посадки или конуса снижения отображается на дисплее парашютиста для обеспечения его навигации во время полета.
7. Способ по п. 5, при котором для отображения глиссады снижения и/или глиссады посадки парашютисту используются тактильные и/или звуковые сигнальные средства.
| US 8489256 B2, 16.07.2013 | |||
| Способ и система приземления парашютиста | 2017 |
|
RU2671896C1 |
| СПОСОБ ПОСАДКИ ПЛАНИРУЮЩЕЙ ПАРАШЮТНОЙ СИСТЕМЫ НА НАЗЕМНЫЙ РАДИОМАЯК | 1989 |
|
RU1777300C |
| УПРАВЛЯЕМАЯ ПАРАШЮТНАЯ СИСТЕМА ДЛЯ ДОСТАВКИ ГРУЗОВ | 1993 |
|
RU2039680C1 |
| МОДУЛЬНАЯ ИНФОРМАЦИОННАЯ СИСТЕМА ПАРАШЮТИСТА | 2018 |
|
RU2681241C1 |

