[ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ]
[0001] Настоящее изобретение относится к способу управления транспортным средством и устройству управления транспортным средством.
[УРОВЕНЬ ТЕХНИКИ]
[0002] Известно устройство управления движением транспортного средства для осуществления смены полосы движения транспортного средства, движущегося по полосе движения, с упомянутоый полосы движения на смежную полосу движения, которая смежна упомянутой полосе движения и перегружена (Патентный документ 1). Когда определяется, что нет места, в которое въезжает транспортное средство, устройство управления движением транспортного средства управляет транспортным средством, чтобы оно двигалось по траектории движения, заранее определенной для осуществления смены полосы движения, и ожидает в положении ожидания на границе полосы движения между полосой движения и смежной полосой движения или в положении ожидания в пределах заданного расстояния от границы полосы движения в полосе движения. Когда определяется, что во время ожидания транспортного средства пространство есть, устройство управления движением транспортного средства управляет транспортным средством, чтобы оно переместилось из положения ожидания в упомянутое пространство.
[ДОКУМЕНТ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ]
[ПАТЕНТНЫЙ ДОКУМЕНТ]
[0003] [Патентный документ 1] JP2016-203745A
[РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ]
[ЗАДАЧА, РЕШАЕМАЯ ИЗОБРЕТЕНИЕМ]
[0004] В частности, когда есть следующее транспортное средство, которое следует за рассматриваемым транспортным средством в ситуации, в которой рассматриваемое транспортное средство осуществляет смену полосы движения, водитель следующего транспортного средства подтверждает ситуацию впереди в течение времени от работы указателя поворота указатель поворота рассматриваемого транспортного средства до начала смены полосы движения. В предшествующем уровне техники время от работы указателя поворота рассматриваемого транспортного средства до начала смены полосы движения может быть сокращено, поскольку смена полосы движения начинается в момент времени, когда определяется, что пространство есть, независимо от наличия или отсутствия следующего транспортного средства. В этом случае возникает проблема, заключающаяся в том, что у водителя следующего транспортного средства недостаточно времени для подтверждения ситуации впереди.
[0005] Задача, которая должна быть решена настоящим изобретением, состоит в том, чтобы предоставить способ управления транспортным средством и устройство управления транспортным средством, которые могут увеличить время для водителя следующего транспортного средства, чтобы подтвердить ситуацию впереди в месте смены полосы движения рассматриваемого транспортного средства.
[СРЕДСТВА РЕШЕНИЯ ЗАДАЧИ]
[0006] Настоящее изобретение решает вышеупомянутую задачу посредством получения информации об окружающей среде рассматриваемого транспортного средства, определяя на основе информации об окружающей среде положение въезда, указывающее положение пункта назначения въезда рассматриваемого транспортного средства, при этом положение въезда расположено на смежной полосе движения (вторая полоса движения), смежная рассматриваемой полосе движения (первая полоса движения), по которой движется рассматриваемое транспортное средство, при работе указателя поворота рассматриваемого транспортного средства, замедление рассматриваемого транспортного средства и осуществление смены полосы движения рассматриваемого транспортного средства, определение наличия или отсутствия следующего транспортное средство, которое следует за рассматриваемым транспортным средством, в заранее определенной области, расположенной позади рассматриваемого транспортного средства на первой полосе движения, и при определении наличия следующего транспортного средства, установка времени подготовки больше, чем время подготовки, при определении отсутствия следующего транспортного средства, времени подготовки, указывающего время от работы указателя поворота рассматриваемого транспортного средства до замедления рассматриваемого транспортного средства и начала смены полосы движения рассматриваемого транспортного средства и управление положением движения рассматриваемого транспортного средства на первой полосе движения в течение времени подготовки.
[РЕЗУЛЬТАТ ИЗОБРЕТЕНИЯ]
[0007] Согласно настоящему изобретению в сцене смены полосы движения рассматриваемого транспортного средства можно увеличить время для водителя следующего транспортного средства, чтобы подтвердить ситуацию впереди.
[КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ]
[0008] Фиг. 1 - блок-схема, иллюстрирующая пример системы транспортного средства, включающей в себя устройство управления транспортным средством, согласно одному или нескольким вариантам осуществления настоящего изобретения.
Фиг. 2 показывает пример взаимосвязи между величиной близости между рассматриваемым транспортным средством и следующим транспортным средством и временем подготовки.
Фиг. 3A - блок-схема процесса смены полосы движения, осуществляемого устройством управления транспортным средством, согласно одному или нескольким вариантам осуществления настоящего изобретения;
Фиг. 3B - блок-схема процесса смены полосы движения, осуществляемого устройством управления транспортным средством, согласно одному или нескольким вариантам осуществления настоящего изобретения;
Фиг. 4 - пример движения рассматриваемого транспортного средства, когда процесс, показанный на фиг. 2 осуществляется (когда отсутствует следующее транспортное средство).
Фиг. 5 - пример движения рассматриваемого транспортного средства, когда процесс, показанный на фиг. 2 осуществляется (когда присутствует следующее транспортное средство).
[ВАРИАНТ (-Ы) ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ]
[0009] В дальнейшем варианты осуществления настоящего изобретения будут описаны со ссылкой на чертежи. Настоящий вариант осуществления изобретения будет описан на примере устройства управления транспортным средством, установленного на транспортном средстве.
[0010] Фиг. 1 является блок-схемой, иллюстрирующей пример системы 200 транспортного средства, включающей в себя устройство 100 управления транспортным средством, согласно варианту осуществления настоящего изобретения. Система 200 транспортного средства согласно настоящему варианту осуществления изобретения установлена на транспортном средстве. Система 200 транспортного средства представляет собой систему, позволяющую транспортному средству автономно менять полосу движения.
[0011] Как показано на фиг. 1, система 200 транспортного средства согласно настоящему варианту осуществления включает в себя группу 10 датчиков окружающей среды, группу 20 датчиков транспортного средства, навигационную систему 30, базу данных 40 карт, HMI 50, контроллер 60 исполнительного механизма, группу 70 исполнительных механизмов управления транспортным средством, указатель поворота 80 и устройство 100 управления транспортным средством. Эти устройства или системы связаны друг с другом посредством сети сети контроллеров (CAN, control area network) или другой локальной сети транспортного средства для взаимного обмена информацией.
[0012] Группа 10 датчиков окружающей среды представляет собой группу датчиков для обнаружения состояния (внешнего состояния) окружающей среды рассматриваемого транспортного средства. Группа 10 датчиков окружающей среды обеспечена в рассматриваемом транспортном средстве. Как показано на фиг. 1, группа 10 датчиков окружающей среды включает в себя, например, радар 11 и устройство 12 формирования изображения, но не ограничивается радаром 11 и устройством 12 формирования изображения.
[0013] Радар 11 обнаруживает объекты вокруг рассматриваемого транспортного средства. Радар 11 включает в себя, например, радар миллиметрового диапазона, лазерный радар, ультразвуковой радар и лазерный дальномер, но не ограничивается ими. Радар 11 обнаруживает любой объект, например, путем передачи радиоволн в окрестности рассматриваемого транспортного средства и приема радиоволн, отраженных объектом. В частности, радар 11 определяет направление и расстояние до объекта. Радар 11 также определяет относительную скорость (включая направление движения) объекта относительно рассматриваемого транспортного средства на основе изменения направления на объект во времени и изменения расстояния до объекта во времени. Радар 11 выводит обнаруженные результаты на устройство 100 управления транспортным средством.
[0014] В настоящем варианте осуществления изобретения радар 11 предназначен для обнаружения во всех направлениях от рассматриваемого транспортного средства. Например, радар 11 обеспечен спереди, сбоку и сзади рассматриваемого транспортного средства, соответственно, и состоит из переднего радара для обнаружения объекта впереди транспортного средства, бокового радара для обнаружения объекта сбоку транспортного средства и задний радар для обнаружения объекта сзади транспортного средства. Количество и тип радаров 11, включенных в рассматриваемое транспортное средство, особо не ограничиваются.
[0015] Устройство 12 формирования изображения отображает объект, находящийся вокруг транспортного средства. Устройство 12 формирования изображения включает в себя, например, камеру, содержащую устройство формирования изображения CCD или CMOS, но не ограничивается. Устройство 12 формирования изображения выводит захваченное изображение на устройство 100 управления транспортным средством.
[0016] В настоящем варианте осуществления изобретения устройство 12 формирования изображения предназначено для изображения во всех направлениях от рассматриваемого транспортного средства. Например, устройство 12 формирования изображения обеспечено спереди, сбоку и сзади транспортного средства, соответственно, и состоит из передней камеры для отображения объекта впереди транспортного средства, боковой камеры для отображения объекта сбоку от транспортного средства, задняя камера для обнаружения объекта сзади транспортного средства. Количество и тип устройств 12 формирования изображения, включенных в рассматриваемое транспортное средство, особо не ограничиваются.
[0017] Объекты, обнаруживаемые группой 10 датчиков окружающей среды, включают в себя, например, велосипеды, мотоциклы, транспортные средства (в дальнейшем также называемые другими транспортными средствами), дорожные препятствия, светофоры, дорожную разметку (включая границы полос движения) и пешеходные переходы. Например, когда другое транспортное средство движется вдоль направления движения рассматриваемого транспортного средства вокруг рассматриваемого транспортного средства, радар 11 определяет направление и расстояние до другого транспортного средства, а также относительную скорость другого транспортного средства относительно рассматриваемого транспортного средства на основе положения рассматриваемого транспортного средства. Кроме того, устройство 12 формирования изображения захватывает изображение, на котором можно идентифицировать тип транспортного средства другого транспортного средства, размер другого транспортного средства и форму другого транспортного средства.
[0018] Кроме того, например, когда рассматриваемое транспортное средство движется по определенной полосе движения среди множества полос, радар 11 обнаруживает границу полосы движения, разделяющую полосу движения, по которой движется рассматриваемое транспортное средство, и полосу движения, расположенную сбоку полосы движения, а также определяет расстояние от рассматриваемого транспортного средства до границы полосы движения. Кроме того, устройство 12 формирования изображения захватывает изображение, на котором можно идентифицировать тип границы полосы движения. Когда полоса, по которой движется рассматриваемое транспортное средство, имеет линии границ полосы движения с обеих сторон, радар 11 обнаруживает каждое из расстояний от рассматриваемого транспортного средства до границ полосы движения. Кроме того, в нижеследующем описании полоса, по которой движется рассматриваемое транспортное средство, упоминается как рассматриваемая полоса движения, а полоса движения, расположенная сбоку рассматриваемой полосы движения, упоминается как смежная полоса движения.
[0019] Группа 20 датчиков транспортного средства представляет собой группу датчиков для обнаружения состояния рассматриваемого транспортного средства (внутреннего состояния). Как показано на фиг. 1, группа 20 датчиков транспортного средства включает в себя датчик 21 скорости транспортного средства, акселерометр 22, гироскопический датчик 23, датчик 24 угла поворота рулевого колеса, датчик 25 акселератора и датчик 26 тормоза, но не ограничивается особым образом.
[0020] Датчик 21 скорости транспортного средства измеряет скорость вращения системы привода, такой как приводной вал, и определяет скорость движения рассматриваемого транспортного средства на основе результата измерения. Датчик 21 скорости транспортного средства обеспечен, например, на приводном валу, вращающемся как одно целое с колесами, или колесами рассматриваемого транспортного средства. Акселерометр 22 определяет ускорение рассматриваемого транспортного средства. Акселерометр 22 включает в себя продольный акселерометр для обнаружения ускорения в продольном направлении рассматриваемого транспортного средства и поперечный акселерометр для обнаружения поперечного ускорения рассматриваемого транспортного средства. Гироскопический датчик 23 определяет скорость вращения рассматриваемого транспортного средства, то есть величину перемещения (угловую скорость) под углом рассматриваемого транспортного средства в единицу времени. Датчик 24 угла поворота рулевого колеса определяет угол поворота рулевого колеса. Датчик 24 угла поворота рулевого колеса, например, обеспечен на рулевом валу рассматриваемого транспортного средства. Датчик 25 акселератора определяет величину нажатия (положение педали акселератора) педали акселератора. Датчик 25 акселератора обеспечен, например, на валу педали акселератора. Датчик 26 тормоза определяет величину нажатия педали тормоза (положение педали тормоза). Датчик 26 тормоза обеспечен, например, на валу педали тормоза.
[0021] Группа 20 датчиков транспортного средства выводит обнаруженный результат в устройство 100 управления транспортным средством. Результаты обнаружения включают в себя, например, скорость транспортного средства, ускорение (включая продольное и поперечное ускорение), угловую скорость, величину нажатия педали акселератора и величину нажатия педали тормоза рассматриваемого транспортного средства.
[0022] Навигационная система 30 представляет собой систему для направления человека, занимающего место в транспортном средстве, (в том числе водителя) рассматриваемого транспортного средства путем указания маршрута от текущего положения рассматриваемого транспортного средства до пункта назначения на основе информации о текущем положении рассматриваемого транспортного средства. Информация о карте вводится из базы 40 данных карт в навигационную систему 30, а информация о пункте назначения вводится через HMI 50 от человека, занимающего место в транспортном средстве,, находящегося в рассматриваемом транспортном средстве, в навигационную систему 30. Навигационная система 30 формирует маршрут движения рассматриваемого транспортного средства на основе введенной информации. Затем навигационная система 30 выводит информацию о маршруте движения рассматриваемого транспортного средства в устройство 100 управления транспортным средством и представляет информацию о маршруте движения рассматриваемого транспортного средства человеку, занимающему местро в транспортном средстве, рассматриваемого транспортного средства через HMI 50. Таким образом, человеку, занимающему местро в транспортном средстве, обеспечен маршрут движения от текущего положения до пункта назначения.
[0023] Как показано на фиг. 1, навигационная система 30 включает в себя GPS 31, коммуникатор 32 и навигационный контроллер 33.
[0024] GPS 31 (GPS, Global Positioning System) получает информацию о местоположении, которая указывает текущее положение рассматриваемого транспортного средства. GPS 31 получает информацию о местоположении рассматриваемого транспортного средства путем приема радиоволн, передаваемых приемником от множества спутниковых каналов связи. Кроме того, GPS 31 может обнаруживать изменения в информации положения рассматриваемого транспортного средства, принимая радиоволны, периодически передаваемые от множества спутниковых систем связи.
[0025] Коммуникатор 32 получает информацию об окружающей среде рассматриваемого транспортного средства извне. Коммуникатор 32 представляет собой, например, устройство, выполненное с возможностью связи с сервером или системой, находящейся вне рассматриваемого транспортного средства. Коммуникатор 32 может связываться с коммуникатором, установленным на другом транспортном средстве.
[0026] Например, коммуникатор 32 получает информацию о дорожном движении из системы передачи информации о дорожном движении (Vehicle Information and Communication System, VICS (зарегистрированный товарный знак), здесь и далее по тексту) посредством устройства передачи информации (маяка) или FM-мультиплексного вещания, или тому подобное, обеспеченное на дороге. Информация о дорожном движении включает в себя, например, информацию о пробках, информацию о дорожно-транспортных происшествиях, информацию о неисправном транспортном средстве, информацию о конструкции, информацию о регулировании скорости, информацию о регулировании полосы движения и так далее для каждой полосы движения. Следует отметить, что информация о дорожном движении возможно включает в себя каждую из вышеупомянутой информации и может включать в себя по меньшей мере любую из вышеупомянутой информации.
[0027] Кроме того, например, когда коммуникатор 32 имеет функцию, допускающую связь с коммуникатором, установленным на другом транспортном средстве, коммуникатор 32 получает информацию о скорости транспортного средства другого транспортного средства и информацию о местоположении другого транспортного средства. Такая связь между рассматриваемым транспортным средством и другим транспортным средством называется связью между транспортными средствами. Коммуникатор 32 может получать информацию, такую как скорость транспортного средства другого транспортного средства, в качестве информации об окружающей среде рассматриваемого транспортного средства посредством связи между транспортными средствами.
[0028] В частности, коммуникатор 32 может получать от VICS информацию, в том числе положение, скорость транспортного средства и направление движения других транспортных средств, в качестве информации об окружающей среде рассматриваемого транспортного средства.
[0029] Навигационный контроллер 33 представляет собой компьютер, который формирует маршрут движения от текущего положения рассматриваемого транспортного средства до пункта назначения. Например, навигационный контроллер 33 включает в себя ПЗУ (постоянное запоминающее устройство), в котором хранится программа для создания маршрута движения, ЦП (центральный процессор), который осуществляет программу, хранящуюся в ПЗУ, и ОЗУ (оперативное запоминающее устройство), которое функционирует как доступное запоминающее устройство.
[0030] Навигационный контроллер 33 принимает информацию о текущем положении рассматриваемого транспортного средства от GPS 31, информацию о дорожном движении от коммуникатора 32, информацию о карте из базы 40 данных карт и информацию о пункте назначения рассматриваемого транспортного средства от HMI 50. Например, предполагается, что человек, занимающий место в транспортном средстве, рассматриваемого транспортного средства установил пункт назначения рассматриваемого транспортного средства через HMI 50. Навигационный контроллер 33 формирует маршрут от текущего положения до пункта назначения в полосе движения в качестве маршрута движения рассматриваемого транспортного средства в соответствии с информацией о местоположении рассматриваемого транспортного средства, информацией о пункте назначения рассматриваемого транспортного средства, информацией о карте, и информацией о дорожном движении. Навигационный контроллер 33 выводит сформированную информацию о маршруте движения в устройство 100 управления транспортным средством и представляет информацию человеку, занимающему местро в транспортном средстве, рассматриваемого транспортного средства через HMI 50.
[0031] В настоящем варианте осуществления изобретения маршрут движения рассматриваемого транспортного средства может быть любым маршрутом при условии, что рассматриваемое транспортное средство может прибыть в пункт назначения из текущего положения, и другие условия не ограничиваются. Например, навигационный контроллер 33 может формировать маршрут движения рассматриваемого транспортного средства в соответствии с условиями, установленными человеком, занимающим место в транспортном средстве,. Например, когда человек, занимающий место в транспортном средстве, задает условия, такие как использование преимущественно платной дороги для прибытия в пункт назначения, навигационный контроллер 33 может формировать маршрут движения, используя платную дорогу, на основе информации о карте. Кроме того, например, навигационный контроллер 33 на основе информации о дорожном движении может формировать маршрут движения рассматриваемого транспортного средства. Например, когда на пути кратчайшего маршрута к пункту назначения возникает затор, навигационный контроллер 33 может осуществлять поиск объездного маршрута и формировать в качестве маршрута движения маршрут, имеющий наименьшее требуемое время из множества объездных маршрутов, таким образом искал.
[0032] База данных карт 40 хранит информацию о карте. Информация о карте включает в себя информацию о дорогах и правилах дорожного движения. Информация о дороге и информация о правилах дорожного движения определяются узлами и связями (также называемыми дорожными связями), соединяющими узлы. Ссылки идентифицируются на уровне полосы движения.
[0033] Дорожная информация относится к дорогам, по которым могут передвигаться транспортные средства. Каждое звено дороги связано с информацией, относящейся к дорогам, такой как, например, тип дороги, ширина дороги, форма дороги, нужно ли ехать прямо, приоритетное отношение движения, разрешен ли обгон (разрешен ли выезд на смежную полосу движения), нужно ли осуществлять предварительную смену полосы движения и т.п., но информация, связанная с дорожной связью, этим не ограничивается. Кроме того, каждое дорожное сообщение связано, например, с информацией о расположении светофоров, расположением перекрестков, приближением перекрестков, типом перекрестков и другой информацией о перекрестках.
[0034] Информация о правилах дорожного движения - это правило, которому транспортное средство должно следовать во время движения. Правила дорожного движения могут включать в себя, например, паузу на маршруте, запрет парковки/прекращение, медленное движение, ограничение скорости, запрет смены полосы движения. Информация о правилах дорожного движения в разделе, определяемом дорожным соединением, связана с каждым дорожным соединением. Например, информация о запрете смены полосы движения связана со ссылкой на дорогу в разделе о запрете смены полосы движения. Информация о правилах дорожного движения может быть связана не только с дорогой, но и с определенной точкой (широтой, маршрутом) на узле или, например, на карте.
[0035] Информация о правилах дорожного движения может включать в себя не только информацию о правилах дорожного движения, но также информацию о светофорах. Например, информация о цвете, отображаемом в данный момент сигналом светофора, и/или информация о периоде, в который переключается отображение светофора, может быть связана с дорожной линией перекрестка, на котором установлен светофор. Информация о светофоре получается от VICS, например, коммуникатором 32, или от устройства передачи информации (например, оптического маяка), установленного на дороге. Отображаемая информация о светофоре меняется с течением времени. Таким образом, информация о правилах дорожного движения обновляется каждый заранее определенный цикл.
[0036] Информация о карте, хранящаяся в базе 40 данных карт, может быть картографической информацией высокой точности, подходящей для автономного вождения. Информация о карте высокой точности получается, например, посредством связи с сервером или системой, обеспеченной вне рассматриваемого транспортного средства. Кроме того, информация о карте высокой точности может быть сформирована в любое время на основе информации, полученной в реальном времени с использованием группы 10 датчиков окружающей среды (например, информация об объекте, обнаруженном радаром 11, изображение окружающей среды рассматриваемого транспортного средства, захваченное устройством формирования изображения 12).
[0037] Здесь будет описано автономное вождение в настоящем варианте осуществления изобретения. В настоящем варианте осуществления изобретения автономное вождение указывает режим вождения, отличный от режима вождения, в котором движущий объект состоит только из водителя. Например, автономное вождение соответствует случаю, когда управляющий объект состоит из контроллера (не показан) для поддержки операции вождения вместе с водителем, или случаю, когда управляющий объект состоит из контроллера (не показан) для осуществления операции вождения от имени водителя.
[0038] В настоящем варианте осуществления изобретения конфигурация, в которой система 200 транспортного средства включает в себя базу данных 40 карт, описана в качестве примера, но конфигурация может быть обеспечена вне системы 200 транспортного средства. Например, информация о карте может быть ранее сохранена в портативном запоминающем устройстве (например, на внешнем жестком диске, флэш-памяти). В этом случае, посредством электрического соединения устройства 100 управления транспортным средством и запоминающего устройства для хранения картографической информации, запоминающее устройство функционирует как база данных 40 карт.
[0039] HMI 50 представляет собой интерфейс для вывода и ввода данных между пассажиром рассматриваемого транспортного средства и системой 200 транспортного средства интерфейс человек – машина (Human Machine Interface, HMI). Примеры HMI 50 могут включать в себя дисплей для отображения текста или видеоинформации и динамик для вывода звука, такого как музыка или звук, но не ограничиваются этим.
[0040] Далее будет описана передача и прием информации через HMI 50. Например, когда человек, занимающий место в транспортном средстве, вводит пункт назначения в HMI 50, пункт назначения выводится из HMI 50 в систему 30 навигации. Это позволяет навигационной системе 30 получать информацию о пункте назначения рассматриваемого транспортного средства. Кроме того, например, когда навигационная система 30 формирует маршрут движения к пункту назначения, навигационная система 30 выводит информацию о маршруте движения в HMI 50. Затем HMI 50 выводит информацию о маршруте движения с дисплея и/или динамика. Таким образом, информация о маршруте движения к пункту назначения обеспечивается человеку, занимающему местро в транспортном средстве, рассматриваемого транспортного средства. Информация о маршруте движения к пункту назначения может включать в себя, например, руководство по маршруту и необходимое время до пункта назначения.
[0041] Кроме того, например, когда человек, занимающий место в транспортном средстве, вводит команду осуществления смены полосы движения в HMI 50, чтобы осуществить смену полосы движения рассматриваемого транспортного средства, команда осуществления смены полосы движения выводится из HMI 50 в устройство 100 управления транспортным средством. Таким образом, устройство 100 управления транспортным средством может начать процесс управления сменой полосы движения. Кроме того, например, когда устройство 100 управления транспортным средством устанавливает целевую траекторию для смены полосы движения, информация о целевой траектории выводится из устройства 100 управления транспортным средством в HMI 50. Затем HMI 50 выводит информацию о целевой траектории с дисплея и/или динамика. Таким образом, информация о целевой траектории для смены полосы движения обеспечивается человеку, занимающему местро в транспортном средстве, рассматриваемого транспортного средства. Информация о целевой траектории для смены полосы движения может включать в себя, например, положение въезда, указанную на смежной полосе движения, и целевую траекторию во время смены полосы движения, но не ограничивается этим. Целевая траектория и положение въезда будут описаны позже.
[0042] Контроллер 60 исполнительного механизма управляет перемещением рассматриваемого транспортного средства. Контроллер 60 исполнительного механизма включает в себя механизм управления рулевым управлением, механизм управления акселератором, механизм управления тормозом, механизм управления двигателем и т.п. Контроллер 60 исполнительного механизма принимает управляющий сигнал от устройства 100 управления транспортным средством, которое будет описано ниже. Контроллер 60 исполнительного механизма, в ответ на сигнал управления от устройства 100 управления транспортным средством, управляет группой 70 исполнительных механизмов управления транспортным средством для осуществления автономного вождения рассматриваемого транспортного средства. Например, когда управляющий сигнал для перемещения рассматриваемого транспортного средства с рассматриваемой полосы движения на смежную полосу движения вводится в контроллер 60 исполнительного механизма, контроллер 60 исполнительного механизма вычисляет угол поворота, необходимый для движения рассматриваемого транспортного средства, величину нажатия акселератора или величина нажатия на тормоз в соответствии со скоростью движения в соответствии с управляющим сигналом. Контроллер 60 исполнительного механизма выводит вычисленные различные параметры в группу 70 исполнительных механизмов управления транспортным средством.
[0043] Управление каждым механизмом может осуществляться полностью автономно или может осуществляться таким образом, чтобы содействовать операции движения водителя. Управление каждым механизмом может быть прервано или остановлено вмешательством водителя. Способ управления движением посредством контроллера 60 исполнительного механизма не ограничивается вышеописанным способом управления, и могут использоваться другие хорошо известные способы.
[0044] Группа 70 исполнительных механизмов управления транспортным средством представляет собой различные исполнительные механизмы для приведения в движение рассматриваемого транспортного средства. Как показано на фиг. 1, группа 70 исполнительных механизмов управления транспортным средством может включать в себя исполнительный механизм 71 рулевого управления, исполнительный механизм 72 акселератора и исполнительный механизм 73 управления тормозом, но не ограничивается этим.
[0045] Исполнительный механизм 71 рулевого управления управляет направлением рулевого управления и величиной рулевого управления рассматриваемого транспортного средства в ответ на входной сигнал от контроллера 60 исполнительного механизма. Исполнительный механизм 72 акселератора регулирует степень ускорения рассматриваемого транспортного средства в ответ на входной сигнал от контроллера 60 исполнительного механизма. Исполнительный механизм 73 управления тормозом управляет работой тормозного устройства рассматриваемого транспортного средства в ответ на входной сигнал от контроллера 60 исполнительного механизма.
[0046] Указатель 80 поворота имеет внутри лампу для мигания. Когда водитель рассматриваемого транспортного средства приводит в действие переключатель указания направления (не показан), указатель 80 поворота загорается оранжевым цветом. Указатель 80 поворота представляет собой устройство для указания направления на окрестности, когда рассматриваемое транспортное средство поворачивает вправо или влево или осуществляет смену полосы движения. Например, указатель 80 поворота встроен в левую и правую части переднего и заднего концов рассматриваемого транспортного средства.
[0047] Кроме того, в настоящем варианте осуществления изобретения управляющий сигнал вводится из устройства 100 управления транспортным средством в указатель 80 поворота. Управляющий сигнал представляет собой сигнал для работы указателя поворота и может включать в себя сигнал для мигания указателя 80 поворота, который выключен (также называемый сигналом мигания), и сигнал для выключения указателя 80 поворота, который мигает (также называемый как сигнал выключения). Например, когда сигнал мигания вводится в указатель поворота 80, чтобы мигать левым указателем поворота, указатель 80 поворота зажигает левый указатель поворота. Когда сигнал выключения для выключения левого указателя поворота подается на указатель 80 поворота, указатель 80 поворота выключает левый указатель поворота. Таким образом, указателем 80 поворота управляет устройство 100 управления транспортным средством, а также водитель рассматриваемого транспортного средства.
[0048] Далее будет описано устройство 100 управления транспортным средством. Устройство 100 управления транспортным средством согласно одному или нескольким вариантам осуществления настоящего изобретения конфигурируется компьютером, на котором установлены аппаратные средства и программное обеспечение. В частности, устройство 100 управления транспортным средством выполнено с возможностью включать в себя постоянного запоминающего устройства (ПЗУ), в котором хранятся программы, центрального процессора (ЦП), который выполняет программы, хранящиеся в ПЗУ, и оперативного запоминающего устройства (ОЗУ), которое служит в качестве доступного запоминающего устройства. В качестве рабочих схем могут использоваться MPU (Micro Processing Unit, микропроцессор), DSP (Digital Signal Processor, цифровой сигнальный процессор), ASIC (Application Specific Integrated Circuit, специализированная интегральная схема) и FPGA (Field Programmable Gate Array, программируемая вентильная матрица) вместо или в дополнение к процессору. Контроллер 101, показанный на фиг. 1, соответствует ЦП (процессору). Хранилище 110, показанное на фиг. 1, соответствует ПЗУ и ОЗУ.
[0049] В настоящем варианте осуществления изобретения программа, которая должна выполняться контроллером 101, заранее сохраняется в хранилище 110, но программа может храниться в другом устройстве. Например, программа может храниться на считываемом компьютером и портативном считываемом компьютером носителе записи (например, дисковом носителе, флэш-памяти и т. д.). В этом случае контроллер 101 выполняет программу, загруженную с считываемого компьютером носителя записи. Другими словами, устройство 100 управления транспортным средством может быть выполнено с возможностью включать в себя только рабочей схемы и загружать программу извне.
[0050] Как показано на фиг. 1, контроллер 101 включает в себя в качестве функциональных блоков блок 102 получения информации, блок 103 указания точки смены полосы движения, блок 104 подготовки к смене полосы движения и блок 105 управления сменой полосы движения. Эти блоки активируют функции, описанные ниже, посредством программного обеспечения, установленного в ПЗУ. В настоящем варианте осуществления изобретения функции контроллера 101 разделены на четыре функциональных блока, и описаны функции соответствующих функциональных блоков. Однако функции контроллера 101 возможно могут быть разделены на четыре блока и могут быть разделены на три или менее функциональных блока или пять или более функциональных блоков. Функция контроллера 101 не ограничивается функцией функционального блока, описанного ниже, но включает в себя, например, функцию управления навигационной системой.
[0051] Далее будет описана функция блока 102 получения информации. Блок 102 получения информации получает различную информацию от группы 10 датчиков окружающей среды, группы 20 датчиков транспортного средства, навигационной системы 30, базы данных 40 карт и HMI 50.
[0052] Блок 102 получения информации получает информацию об окружающей среде (также называемую внешней информацией о рассматриваемом транспортном средстве) рассматриваемого транспортного средства, которая обнаруживается группой 10 датчиков окружающей среды. Информация об окружающей среде рассматриваемого транспортного средства включает в себя результат обнаружения, обнаруженный радаром 11, и захваченное изображение, захваченное устройством 12 формирования изображения. Кроме того, блок 102 получения информации получает информацию (также называемую внутренней информацией о рассматриваемом транспортном средстве), указывающую состояние рассматриваемого транспортного средства, которое обнаруживается группой 20 датчиков транспортного средства. Внутренняя информация о рассматриваемом транспортном средстве включает в себя скорость транспортного средства, ускорение, угловую скорость, величину нажатия педали акселератора и величину нажатия педали тормоза. Кроме того, блок 102 получения информации получает текущее положение рассматриваемого транспортного средства, маршрут движения рассматриваемого транспортного средства и информацию о дорожном движении от навигационной системы 30. Блок 102 получения информации получает информацию о карте (включая информацию о дороге и информацию о правилах дорожного движения) из базы 40 данных карт.
[0053] Блок 103 указания точки смены полосы движения получает текущее положение рассматриваемого транспортного средства и маршрут движения рассматриваемого транспортного средства от навигационной системы 30 и определяет точку смены полосы движения в соответствии с текущим положением рассматриваемого транспортного средства и маршрутом движения. Точка смены полосы движения указывает точку, в которой транспортное средство необходимо переместить с рассматриваемой полосы на смежную полосу движения при движении по маршруту движения. Блок 103 указания точки смены полосы движения определяет точку, в которой смена полосы движения должна быть выполнена на маршруте движения, посредством ссылки на маршрут движения рассматриваемого транспортного средства.
[0054] Блок 103 указания точки смены полосы движения определяет, исходя из маршрута движения рассматриваемого транспортного средства, точку, в которой направление движения изменяется, например, перекресток, или точку, в которой курс изменяется в направлении, отличном от направления движения транспортного средства, такое как развязка, в качестве целевой точки. Затем блок 103 указания точки смены полосы движения определяет в качестве точки смены полосы движения точку, в которой транспортное средство необходимо переместить на смежную полосу движения с рассматриваемой полосы движения, чтобы изменить направление движения рассматриваемого транспортного средства в целевой точке.
[0055] Например, когда маршрут движения настроен на маршрут, где рассматриваемое транспортное средство поворачивает направо на перекрестке перед текущим положением, и рассматриваемое транспортное средство движется по крайней левой полосе из множества полос, рассматриваемому транспортному средству требуется перейти с крайней левой полосы на правую для поворота направо. В такой сцене блок 103 указания точки смены полосы движения определяет перекресток, на котором требуется поворот направо, в качестве целевой точки. Блок 103 указания точки смены полосы движения определяет в качестве точки смены полосы движения точку на полосе движения, которая расположена на заданном расстоянии перед перекрестком (целевой точкой), где должен быть сделан поворот направо. Например, точка смены полосы движения устанавливается на более сотен метров впереди целевой точки на маршруте движения. Точка смены полосы движения возможно должна быть установлена в точке, но ее можно установить как заранее определенный участок. В качестве другого примера точка смены полосы движения может включать в себя заранее определенный участок перед точкой разветвления, обеспеченной на скоростной автомагистрали, и заранее определенный участок перед пунктом назначения рассматриваемого транспортного средства. Точка разветвления, обеспеченная на скоростной автомагистрали, может включать в себя точки разветвления в каждом направлении и точки разветвления между основной линией и съездом. В настоящем варианте осуществления изобретения, когда точка смены полосы движения определена как участок, длина участка точки смены полосы движения особо не ограничивается.
[0056] В настоящем варианте осуществления изобретения, когда рассматриваемое транспортное средство достигло точки смены полосы движения после того, как точка смены полосы движения была определена блоком 103 указания точки смены полосы движения, или когда человек, занимающий место в транспортном средстве, вводит команду на осуществление смены полосы движения, процесс смены полосы движения, в котором рассматриваемое транспортное средство автономно осуществляет смену полосы движения, осуществляется посредством функций, описанных ниже.
[0057] Блок 104 подготовки к смене полосы движения осуществляет управление подготовкой для осуществления смены полосы движения рассматриваемого транспортного средства, когда текущее положение рассматриваемого транспортного средства достигло точки смены полосы движения. Управление подготовкой включает в себя определение положения въезда, определение области-кандидата на смену полосы движения, установку положения работы указателя поворота для управления указателем поворота, управление скоростью транспортного средства, установку времени подготовки и управление указателем поворота. Управление подготовкой включает в себя определение наличия или отсутствия следующего транспортного средства. Блок 104 подготовки к смене полосы движения устанавливает время подготовки в соответствии с наличием или отсутствием следующего транспортного средства и осуществляет управление скоростью транспортного средства, чтобы удовлетворить условию времени подготовки. Разница в управлении скоростью транспортного средства в зависимости от наличия или отсутствия следующего транспортного средства будет описана позже. В одном или более вариантах осуществления настоящего изобретения управление скоростью транспортного средства используется в качестве примера для объяснения. Однако он не ограничивается управлением скоростью транспортного средства, поскольку это метод, используемый для управления положением, в котором движется рассматриваемое транспортное средство (положение движения рассматриваемого транспортного средства) по рассматриваемой полосе движения. Например, управление рулевым управлением может осуществляться вместо управления скоростью транспортного средства или вместе с ним.
[0058] Блок 104 подготовки к смене полосы движения определяет положение въезда, которое указывает положение пункта назначения въезда рассматриваемого транспортного средства, и расположено на смежной полосе движения, смежной указанной полосе движения, по которой движется рассматриваемое транспортное средство в соответствии с информацией об окружающей среде рассматриваемого транспортного средства. Например, блок 104 подготовки к смене полосы движения определяет в качестве положения въезда место на смежной полосе движения, расстояние которого вдоль направления движения транспортного средства равно или больше заранее определенного расстояния на основе результата, обнаруженного посредством радара 11 и захваченного изображения, полученного устройством 12 формирования изображения.
[0059] Кроме того, при указании положения въезда блок 104 подготовки к смене полосы движения определяет, среди других транспортных средств, расположенных впереди и/или позади положения въезда, другое транспортное средство, расположенное впереди, как переднее транспортное средство, и другое транспортное средство, расположенное позади как заднее транспортное средство. Таким образом, блок 104 подготовки к смене полосы движения определяет переднее транспортное средство, расположенное перед положением въезда, и заднее транспортное средство, расположенное за положением въезда, среди множества других транспортных средств, расположенных на смежной полосе движения. Например, блок 104 подготовки к смене полосы движения определяет в качестве переднего транспортного средства другое транспортное средство, которое находится ближе всего к положению въезда среди множества других транспортных средств, расположенных перед положением въезда в смежную полосу движения, на основе результата, обнаруженного радаром 11, и захваченного изображения, захваченного устройством 12 формирования изображения. Кроме того, блок 104 подготовки к смене полосы движения определяет в качестве заднего транспортного средства другое транспортное средство, которое находится ближе всего к положению въезда среди множества других транспортных средств, расположенных позади положения въезда в смежную полосу движения. В частности, при указании переднего транспортного средства и заднего транспортного средства блок 104 подготовки к смене полосы движения может заранее обозначить заранее определенную область, расположенную перед положением въезда, и определить другое транспортное средство, существующее в заранее определенной области, как переднее транспортное средство. Например, блок 104 подготовки к смене полосы движения обозначает в качестве заранее определенной области область, имеющую длину в направлении вдоль направления движения рассматриваемого транспортного средства на основе скорости транспортного средства рассматриваемого транспортного средства. Заранее определенная область особо не ограничивается. Заранее определенная область может быть заранее определенной областью, хранящейся в запоминающем устройстве, таком как ПЗУ. В частности, когда за положением въезда нет другого транспортного средства, блок 104 подготовки к смене полосы движения может определять только переднее транспортное средство.
[0060] При определении по меньшей мере переднего транспортного средства, блок 104 подготовки к смене полосы движения определяет заранее определенную область, расположенную позади переднего транспортного средства, в качестве области-кандидата на смену полосы движения (в дальнейшем также называемой областью-кандидатом на смену полосы движения) на смежной полосе движения. Когда заднее транспортное средство движется позади переднего транспортного средства, блок 104 подготовки к смене полосы движения определяет область между передним транспортным средством и задним транспортным средством в качестве области-кандидата на смену полосы движения. Когда никакое другое транспортное средство не движется позади переднего транспортного средства, блок 104 подготовки к смене полосы движения устанавливает область-кандидата на смену полосы движения, так что длина области-кандидата на смену полосы движения становится заданной длины вдоль направления движения рассматриваемого транспортного средства.
[0061] Блок 104 подготовки к смене полосы движения устанавливает положение работы указателя поворота и управляет синхронизацией работы указателя 80 поворота, чтобы информировать транспортные средства, движущиеся по рассматриваемой полосе движения и по смежной полосе движения, о намерении смены полосы движения. Кроме того, блок 104 подготовки к смене полосы движения устанавливает положение изменения скорости транспортного средства для изменения скорости транспортного средства рассматриваемого транспортного средства и управляет скоростью транспортного средства рассматриваемого транспортного средства до тех пор, пока рассматриваемое транспортное средство не достигнет положения изменения скорости транспортного средства, чтобы информировать транспортные средства, движущиеся по рассматриваемой полосе движения и на смежной полосе движения, о намерении смены полосы движения. Кроме того, блок 104 подготовки к смене полосы движения устанавливает положение начала движения в сторону для движения рассматриваемого транспортного средства на сторону полосы движения и управляет моментом начала движения в сторону для движения рассматриваемого транспортного средства на сторону полосы движения, чтобы информировать транспортные средства, движущиеся по рассматриваемой полосе движения и по смежной полосе движения, о намерении смены полосы движения. Кроме того, когда рассматриваемое транспортное средство достигло положения изменения скорости транспортного средства, блок 104 подготовки к смене полосы движения определяет наличие или отсутствие следующего транспортного средства и устанавливает время подготовки в соответствии с наличием или отсутствием следующего транспортного средства. Блок 104 подготовки к смене полосы движения также регулирует скорость транспортного средства рассматриваемого транспортного средства в соответствии со временем подготовки. Далее будут описаны соответствующие контроллеры.
[0062] Блок 104 подготовки к смене полосы движения устанавливает положение работы указателя поворота на основе скорости транспортного средства рассматриваемого транспортного средства, скорости транспортного средства переднего транспортного средства и положения переднего транспортного средства. Положение работы указателя поворота представляет собой положение, в котором указатель поворота начинает мигать, чтобы сообщить переднему транспортному средству о намерении смены полосы движения. Положение работы указателя поворота выражается как положение относительно положения переднего транспортного средства при указании области-кандидата на смену полосы движения. Положение работы указателя поворота устанавливается на полосе объекта. Положение работы указателя поворота установлено в диапазоне, в котором указатель поворота рассматриваемого транспортного средства виден водителю переднего транспортного средства, движущегося по смежной полосе движения. Кроме того, положение работы указателя поворота установлено в положение, при котором мигание указателя поворота легко видно водителю переднего транспортного средства.
[0063] Блок 104 подготовки к смене полосы движения устанавливает положение изменения скорости транспортного средства на заранее определенном расстоянии от положения работы указателя поворота в направлении движения рассматриваемого транспортного средства. Заранее определенное расстояние - это, например, общая длина рассматриваемого транспортного средства. Заранее определенное расстояние может быть общей длиной другого транспортного средства. Положение изменения скорости транспортного средства устанавливается в положение, которое находится впереди переднего транспортного средства, в котором блок 104 подготовки к смене полосы движения сообщает о намерении смены полосы движения, и находится перед положением работы указателя поворота. Положение изменения скорости транспортного средства выражается как положение относительно переднего транспортного средства, а также положение работы указателя поворота. Положение изменения скорости транспортного средства может быть положением впереди положения переднего транспортного средства на длину, полученную путем умножения расстояния от положения переднего транспортного средства до положения работы указателя поворота на фиксированное отношение.
[0064] Блок 104 подготовки к смене полосы движения устанавливает положение начала движения в сторону в положении, которое расположено на заданном расстоянии от положения работы указателя поворота в направлении, противоположном направлению движения рассматриваемого транспортного средства. Заранее определенное расстояние - это экспериментально определенное расстояние, а не расстояние, которое должно быть особенно ограничено. Положение начала движения в сторону устанавливается в положение, которое находится за положением изменения скорости транспортного средства и далее за положением работы указателя поворота. Положение начала движения в сторону выражается как положение относительно переднего транспортного средства, а также положение работы указателя поворота и положение изменения скорости транспортного средства.
[0065] Блок 104 подготовки к смене полосы движения управляет скоростью транспортного средства рассматриваемого транспортного средства так, чтобы положение рассматриваемого транспортного средства достигло положения изменения скорости транспортного средства из состояния, в котором рассматриваемое транспортное средство движется вокруг переднего транспортного средства. Например, когда положение рассматриваемого транспортного средства движется за положением изменения скорости транспортного средства в состоянии, в котором рассматриваемое транспортное средство и переднее транспортное средство движутся параллельно, блок 104 подготовки к смене полосы движения выдает управляющий сигнал для управления скоростью транспортного средства. к контроллеру 60 исполнительного механизма, так что скорость транспортного средства рассматриваемого транспортного средства больше, чем скорость транспортного средства переднего транспортного средства.
[0066] Когда текущее положение рассматриваемого транспортного средства достигло положения изменения скорости транспортного средства, блок 104 подготовки к смене полосы движения определяет, существует ли следующее транспортное средство, которое следует за рассматриваемым транспортным средством, в заранее определенной области, расположенной позади рассматриваемого транспортного средства в рассматриваемою полосу движения. Например, блок 104 подготовки к смене полосы движения определяет, движется ли следующее транспортное средство в пределах заранее определенной области, расположенной позади рассматриваемого транспортного средства, на основе результата, обнаруженного радаром 11, и захваченного изображения, захваченного устройством 12 формирования изображения. Заранее определенная область заранее определена и сохраняется в запоминающем устройстве, таком как ПЗУ. Заранее определенная область представляет собой, например, область, имеющую длину в направлении вдоль направления движения рассматриваемого транспортного средства на основе скорости транспортного средства рассматриваемого транспортного средства, но не ограничивается этой областью. Положение заранее определенной области представлено, например, положением относительно положения въезда. Положение заранее определенных областей включает в себя, но не ограничивается этим, положение на смежной полосе движения, так что положение въезда и положение заранее определенной области выровнены в поперечном направлении в направлении ширины транспортного средства рассматриваемого транспортного средства.
[0067] Блок 104 подготовки к смене полосы движения устанавливает другое время подготовки в соответствии с результатом определения наличия или отсутствия следующего транспортного средства. Время подготовки - это время от начала работы указателя поворота рассматриваемого транспортного средства до начала смены полосы движения рассматриваемого транспортного средства. В частности, в одном или более вариантах осуществления настоящего изобретения время подготовки включает время, требуемое с момента, когда рассматриваемое транспортное средство достигает положения работы указателя поворота, до момента, когда рассматриваемое транспортное средство перемещается в положение начала движения в сторону, и время, требуемое от время, когда рассматриваемого транспортного средства достигает положения начала движения в сторону, до момента, когда рассматриваемого транспортного средства начинает смену полосы движения.
[0068] Блок 104 подготовки к смене полосы движения устанавливает большее время подготовки, когда определяется, что идет следующее транспортное средство, по сравнению со временем подготовки, когда определяется, что следующее транспортное средство отсутствует. Затем блок 104 подготовки к смене полосы движения управляет скоростью транспортного средства рассматриваемого транспортного средства так, чтобы время от момента срабатывания указателя поворота рассматриваемого транспортного средства до момента, когда рассматриваемое транспортное средство начинает движение в сторону полосы движения, становилось установленным временем подготовки. Следующее объяснение описывает, как управлять скоростью транспортного средства рассматриваемого транспортного средства в соответствии со временем подготовки.
[0069] Блок 104 подготовки к смене полосы движения устанавливает скорость транспортного средства рассматриваемого транспортного средства так, чтобы относительная скорость рассматриваемого транспортного средства относительно переднего транспортного средства была отрицательной, и изменяет скорость транспортного средства рассматриваемого транспортного средства. Относительная скорость рассматриваемого транспортного средства относительно переднего транспортного средства отрицательна, поэтому рассматриваемое транспортное средство движется назад относительно переднего транспортного средства. Водитель переднего транспортного средства может распознать по движению рассматриваемого транспортного средства, что рассматриваемое транспортное средство не входит в пространство перед передним транспортным средством.
[0070] Кроме того, при установке скорости транспортного средства рассматриваемого транспортного средства блок 104 подготовки к смене полосы движения устанавливает скорость транспортного средства рассматриваемого транспортного средства так, чтобы относительная скорость становилась скоростью, соответствующей времени подготовки, при этом относительная скорость рассматриваемого транспортного средства относительно переднего транспортного средства отрицательна. В частности, когда определяется, что идет следующее транспортное средство, блок 104 подготовки к смене полосы движения устанавливает скорость транспортного средства рассматриваемого транспортного средства так, чтобы абсолютное значение относительной скорости стало меньше, чем когда определено, что следующее транспортное средство отсутствует. Другими словами, когда определяется, что идет следующее транспортное средство, блок 104 подготовки к смене полосы движения устанавливает скорость транспортного средства рассматриваемого транспортного средства так, чтобы разница в скорости транспортного средства между скоростью транспортного средства переднего транспортного средства и скоростью транспортного средства рассматриваемого транспортного средства становится меньше по сравнению с тем, когда определяется, что следующее транспортное средство отсутствует. Таким образом, когда определяется наличие следующего транспортного средства, скорость, с которой рассматриваемое транспортное средство движется назад относительно переднего транспортного средства, становится меньше по сравнению с тем, когда определяется, следующее транспортное средство отсутствует. Когда скорость, с которой рассматриваемое транспортное средство движется назад относительно переднего транспортного средства, становится меньше, время, необходимое для рассматриваемого транспортного средства, чтобы достичь положения начала движения в сторону из положения работы указателя поворота, и время, необходимое для рассматриваемого транспортного средства, чтобы начать смену полосы движения из положения начала движения в сторону, будет дольше.
[0071] Кроме того, когда определяется наличие следующего транспортного средства, блок 104 подготовки к смене полосы движения определил, насколько мала разница в скорости транспортного средства между скоростью транспортного средства переднего транспортного средства и скоростью транспортного средства рассматриваемого транспортного средства в сравнении со случаем, когда определяется, что следующее транспортное средство отсутствует, в соответствии со величиной близости между рассматриваемым транспортным средством и следующим транспортным средством.
[0072] Когда определено наличие следующего транспортного средства, блок 104 подготовки к смене полосы движения вычисляет величину близости между рассматриваемым транспортным средством и следующим транспортным средством на основе информации об окружающей среде рассматриваемого транспортного средства. Например, блок 104 подготовки к смене полосы движения вычисляет THW (Time Head Way, время прохождения пути) или TTC (Time to Collision, время до столкновения) на основе расстояния от транспортного средства до транспортного средства между рассматриваемым транспортным средством и следующим транспортным средством. THW - это значение, полученное путем деления расстояния от транспортного средства до транспортного средства между рассматриваемым транспортным средством и следующим транспортным средством на скорость транспортного средства рассматриваемого транспортного средства. TTC - это величина, полученная путем деления расстояния от транспортного средства до транспортного средства между рассматриваемым транспортным средством и следующим транспортным средством на относительную скорость следующего транспортного средства относительно рассматриваемого транспортного средства. Блок 104 подготовки к смене полосы движения вычисляет величину близости между рассматриваемым транспортным средством и следующим транспортным средством, используя по меньшей мере одно из расстояния от транспортного средства до транспортного средства между рассматриваемым транспортным средством и следующим транспортным средством, THW и TTC. Принимая THW в качестве примера, блок 104 подготовки к смене полосы движения увеличивает величину близости между рассматриваемым транспортным средством и следующим транспортным средством по мере увеличения значения THW. Объяснение опускается, но блок 104 подготовки к смене полосы движения аналогичным образом вычисляет величину близости между рассматриваемым транспортным средством и следующим транспортным средством, даже когда используется расстояние от транспортного средства до транспортного средства или TTC.
[0073] Фиг. 2 показывает пример взаимосвязи между величиной близости между рассматриваемым транспортным средством и следующим транспортным средством и временем подготовки. На фиг. 2 горизонтальная ось указывает величину близости между рассматриваемым транспортным средством и следующим транспортным средством. Вертикальная ось указывает время подготовки. Горизонтальная ось показывает, что с левой стороны величина близости между рассматриваемым транспортным средством и следующим транспортным средством выше. Вертикальная ось показывает, что время подготовки больше на верхней стороне. Как показано на фиг. 2, блок 104 подготовки к смене полосы движения устанавливает скорость транспортного средства рассматриваемого транспортного средства таким образом, что чем больше величина близости между рассматриваемым транспортным средством и следующим транспортным средством, тем дольше будет время подготовки. Таким образом, блок 104 подготовки к смене полосы движения устанавливает скорость транспортного средства рассматриваемого транспортного средства таким образом, что чем больше величина близости между рассматриваемым транспортным средством и следующим транспортным средством, тем меньше разница в скорости транспортного средства между скоростью транспортного средства рассматриваемого транспортного средства и скорость транспортного средства следующего транспортного средства. В примере на фиг. 2, хотя величина близости между рассматриваемым транспортным средством и следующим транспортным средством и время подготовки выражены как пропорциональная зависимость, пропорциональная константа должна быть только отрицательной, и ее размер не ограничен. Кроме того, при установке скорости транспортного средства рассматриваемого транспортного средства в соответствии со величиной близости, она не ограничивается соотношением между временем подготовки и величиной близости, и, например, соотношением между временем прибавления, которое должно быть добавляется в течение заранее определенного времени, и может использоваться величина близости.
[0074] Блок 105 управления сменой полосы движения управляет указателем 80 поворота и начинает мигать указателем 80 поворота, когда рассматриваемое транспортное средство движется назад по отношению к переднему транспортному средству из положения изменения скорости транспортного средства, и положение рассматриваемого транспортного средства достигает положения работы указателя поворота. В это время мигание указателя 80 поворота начинается в точке в пределах области, где мигание указателя 80 поворота видно водителю переднего транспортного средства. Следовательно, водитель переднего транспортного средства может распознать, что рассматриваемое транспортное средство приближается к задней части переднего транспортного средства. То есть водитель переднего транспортного средства может понять намерение о смене полосы движения рассматриваемого транспортного средства, распознавая, что рассматриваемое транспортное средство движется назад из положения впереди переднего транспортного средства, и что задействуется мигание указателя поворота.
[0075] Блок 105 управления сменой полосы движения начинает перемещать рассматриваемое транспортное средство в сторону полосы движения, управляя углом рулевого управления рассматриваемого транспортного средства, когда рассматриваемое транспортное средство движется назад относительно переднего транспортного средства из положения работы указателя поворота и положения рассматриваемого транспортного средства достигает положения начала движения в сторону. В это время в одном или более вариантах осуществления настоящего изобретения блок 105 управления сменой полосы движения управляет рулевым управлением рассматриваемого транспортного средства без управления скоростью транспортного средства рассматриваемого транспортного средства. Например, блок 105 управления сменой полосы движения управляет рулевым управлением рассматриваемого транспортного средства так, чтобы рассматриваемое транспортное средство располагалось между границей полосы движения на стороне смежной полосы движения и осевой линией указанной полосы движения вдоль направления движения рассматриваемого транспортного средства. Блок 105 управления сменой полосы движения вычисляет расстояние, необходимое для перемещения рассматриваемого транспортного средства в сторону полосы движения от текущего положения рассматриваемого транспортного средства, и устанавливает угол рулевого управления, необходимый для перемещения. Затем блок 105 управления сменой полосы движения выдает управляющий сигнал, включающий в себя заданное содержание, на контроллер 60 исполнительного механизма.
[0076] Блок 105 управления сменой полосы движения измеряет длину области-кандидата на смену полосы движения и сравнивает длину области-кандидата на смену полосы движения с заранее определенным порогом определения, когда рассматриваемое транспортное средство движется рядом с областью-кандидатом на смену полосы движения, перемещаясь на сторону смежной полосы движения из положения начала движения в сторону. Длина области-кандидата на смену полосы движения - это длина в направлении вдоль маршрута движения. Пороговое значение определения - это порог для определения возможности смены полосы движения, которое устанавливается заранее. Например, порог определения устанавливается на длину, при которой заранее определенная длина (например, 6 м) может быть закреплена соответственно спереди и сзади транспортного средства. В частности, порог определения может быть изменен в соответствии со скоростью транспортного средства другого транспортного средства на смежной полосе движения и/или скоростью транспортного средства рассматриваемого транспортного средства и так далее.
[0077] Когда длина области кандидата на смену полосы движения равна или превышает порога определения, блок 105 управления сменой полосы движения формирует целевую траекторию для рассматриваемого транспортного средства, чтобы осуществить смену полосы движения, которая является траекторией из текущего положения рассматриваемого транспортного средства в качестве начальной точки к положению въезда в пределах области-кандидата на смену полосы движения в качестве конечной точки. Блок 105 управления сменой полосы движения устанавливает скорость транспортного средства и угол рулевого управления, когда рассматриваемое транспортное средство движется по целевой траектории. Блок 105 управления сменой полосы движения выдает управляющий сигнал, соответствующий установленной скорости транспортного средства и углу рулевого управления, на контроллер 60 исполнительного механизма. Когда положение рассматриваемого транспортного средства достигло положения въезда, блок 105 управления сменой полосы движения прекращает мигать указателем 80 поворота и прекращает управление сменой полосы движения.
[0078] Далее со ссылкой на фиг. 3A и 3B будет описана последовательность операций управления контроллером 101. На фиг. 3A и 3B показана блок-схема процесса управления, осуществляемого устройством управления транспортным средством, согласно одному или более вариантам осуществления настоящего изобретения. Управление каждым механизмом может осуществляться полностью автономно или может осуществляться таким образом, чтобы содействовать управлению движением водителя.
[0079] На этапе S1 контроллер 101 получает внешнюю информацию (информацию об окружающей среде) о рассматриваемом транспортном средстве от группы 10 датчиков окружающей среды. Контроллер 101 получает внутреннюю информацию о рассматриваемом транспортном средстве. В частности, контроллер 101, выполняя процесс управления после этапа S2, получает внешнюю информацию и внутреннюю информацию о рассматриваемом транспортном средстве в заранее определенном цикле. Состояние движения обозначается положением транспортного средства, скоростью транспортного средства и т. д.
[0080] На этапе S2 контроллер 101 определяет точку смены полосы движения на основе маршрута движения рассматриваемого транспортного средства. На этапе S3 контроллер 101 сравнивает текущее положение рассматриваемого транспортного средства с точкой смены полосы движения и определяет, достигло ли рассматриваемое транспортное средство точки смены полосы движения. Когда текущее положение рассматриваемого транспортного средства не достигло точки смены полосы движения, контроллер 101 повторно осуществляет процесс управления на этапе S3. Когда текущее положение рассматриваемого транспортного средства достигло точки смены полосы движения, контроллер 101 осуществляет процесс управления на этапе S4 и последующих этапах.
[0081] На этапе S4 контроллер 101 определяет положение въезда рассматриваемого транспортного средства на смежной полосе движения из информации об окружающей среде рассматриваемого транспортного средства и определяет е другое транспортное средство, расположенное перед положением въезда, как переднее транспортное средство. На этапе S5 контроллер 101 определяет область-кандидата на смену полосы движения позади переднего транспортного средства на смежной полосе движения.
[0082] На этапе S6 контроллер 101 устанавливает положение работы указателя поворота в пределах заранее определенного диапазона, расположенного перед передним транспортным средством на рассматриваемой полосе движения. Контроллер 101 также устанавливает положение изменения скорости транспортного средства перед положением работы указателя поворота. Кроме того, контроллер 101 устанавливает положение начала движения в сторону после положения работы указателя поворота.
[0083] На этапе S7 контроллер 101 управляет скоростью транспортного средства рассматриваемого транспортного средства так, чтобы текущее положение рассматриваемого транспортного средства приближалось к положению изменения скорости транспортного средства на основе текущего положения рассматриваемого транспортного средства, скорости транспортного средства рассматриваемого транспортного средства, текущего положения переднего транспортного средства, скорости транспортного средства переднего транспортного средства и положения изменения скорости транспортного средства. Например, когда рассматриваемое транспортное средство расположено позади переднего транспортного средства, и скорость транспортного средства рассматриваемого транспортного средства ниже, чем скорость транспортного средства переднего транспортного средства, контроллер 101 управляет скоростью транспортного средства так, чтобы скорость транспортного средства рассматриваемого транспортного средства была выше, чем скорость транспортного средства переднего транспортного средства. В качестве другого примера, когда рассматриваемое транспортное средство расположено впереди переднего транспортного средства и скорость транспортного средства рассматриваемого транспортного средства ниже, чем скорость транспортного средства переднего транспортного средства, контроллер 101 управляет скоростью транспортного средства рассматриваемого транспортного средства, так что текущая скорость транспортного средства рассматриваемого транспортного средства сохраняется.
[0084] На этапе S8 контроллер 101 сравнивает текущее положение рассматриваемого транспортного средства с положением изменения скорости транспортного средства и определяет, достигло ли текущее положение рассматриваемого транспортного средства положения изменения скорости транспортного средства. Когда текущее положение рассматриваемого транспортного средства не достигло положения изменения скорости транспортного средства, контроллер 101 повторно осуществляет процесс управления на этапе S8.
[0085] На этапе S9 контроллер 101 определяет, наличие или отсутствие следующего транспортного средства, которое следует за рассматриваемым транспортным средством, в заранее определенной области, расположенной позади рассматриваемого транспортного средства на рассматриваемой полосе движения. Когда определяется наличие следующего транспортного средства, процесс переходит к этапу S10. С другой стороны, когда определяется отсутствие следующего транспортного средства, процесс переходит к этапу S13.
[0086] Когда на этапе S9 определяется наличие следующего транспортного средства, процесс переходит к этапу S10. На этапе S10 контроллер 101 вычисляет величину близости между рассматриваемым транспортным средством и следующим транспортным средством, определенным на этапе S9. Например, контроллер 101 вычисляет величину близости на основании расстояния от транспортного средства до транспортного средства между рассматриваемым транспортным средством и следующим транспортным средством.
[0087] На этапе S11 контроллер 101 устанавливает время подготовки больше заранее определенного времени, установленного заранее. Заранее определенное время - это время, определенное экспериментально, и оно заранее сохраняется в запоминающем устройстве, таком как ПЗУ. Например, заранее определенное время - это время, соответствующее скорости транспортного средства рассматриваемого транспортного средства. Контроллер 101 устанавливает время подготовки в соответствии со величиной близости между рассматриваемым транспортным средством и следующим транспортным средством, вычисленной на этапе S10. Например, контроллер 101 обращается к карте, показывающей взаимосвязь между величиной близости между рассматриваемым транспортным средством и следующим транспортным средством и временем подготовки, как показано на фиг. 2. Контроллер 101 определяет время подготовки, соответствующее величины близости между рассматриваемым транспортным средством и следующим транспортным средством, вычисленной на этапе S10.
[0088] На этапе S12 контроллер 101 управляет рассматриваемым транспортным средством, чтобы оно перемещалось по рассматриваемой полосе движения со скоростью, при которой относительная скорость (Vs1) рассматриваемого транспортного средства относительно переднего транспортного средства становится отрицательной. В это время контроллер 101 устанавливает скорость транспортного средства рассматриваемого транспортного средства так, чтобы относительная скорость стала скоростью, соответствующей времени подготовки, установленному на этапе S11, при этом относительная скорость рассматриваемого транспортного средства относительно переднего транспортного средства становится отрицательной. Относительная скорость (Vs1) рассматриваемого транспортного средства относительно переднего транспортного средства, установленная на этом этапе, имеет соотношение, в котором размер абсолютного значения меньше, чем относительная скорость (Vs2) рассматриваемого транспортного средства относительно переднего транспортного средства, установленного на этапе S14, который будет описан позже.
[0089] Когда на этапе S9 определяется, что нет следующего транспортного средства, процесс переходит к этапу S13. На этапе S13 контроллер 101 устанавливает время подготовки на заранее определенное время. Заранее определенное время на этом этапе такое же, как заранее определенное время, описанное на этапе S7.
[0090] На этапе S14, как и на этапе S12, контроллер 101 управляет рассматриваемым транспортным средством, чтобы оно перемещалось по рассматриваемой полосе движения со скоростью, при которой относительная скорость (Vs2) рассматриваемого транспортного средства относительно переднего транспортного средства становится отрицательной. В это время контроллер 101 устанавливает скорость транспортного средства рассматриваемого транспортного средства так, чтобы относительная скорость стала скоростью транспортного средства, соответствующей времени подготовки, установленному на этапе S13, при этом относительная скорость рассматриваемого транспортного средства относительно переднего транспортного средства становится отрицательной.
[0091] Когда на этапе S12 или этапе S14 скорость транспортного средства рассматриваемого транспортного средства устанавливается на скорость, при которой относительная скорость рассматриваемого транспортного средства относительно переднего транспортного средства становится отрицательной, рассматриваемое транспортное средство движется назад относительно переднего транспортного средства. Когда рассматриваемое транспортное средство двинулось назад относительно переднего транспортного средства, процесс переходит к этапу S15. На этапе S15 контроллер 101 сравнивает текущее положение рассматриваемого транспортного средства с положением работы указателя поворота и определяет, достигло ли текущее положение рассматриваемого транспортного средства положения работы указателя поворота. Когда текущее положение рассматриваемого транспортного средства не достигло положения работы указателя поворота, контроллер 101 повторно осуществляет процесс управления на этапе S15.
[0092] Когда текущее положение рассматриваемого транспортного средства достигло положения работы указателя поворота, контроллер 101 приводит в действие указатель 80 поворота, чтобы начать мигать указателем 80 поворота на этапе S16.
[0093] На этапе S17 контроллер 101 сравнивает текущее положение рассматриваемого транспортного средства с положением начала движения в сторону и определяет, достигло ли текущее положение рассматриваемого транспортного средства положения начала движения в сторону. Когда текущее положение рассматриваемого транспортного средства не достигло положения начала движения в сторону, контроллер 101 повторно осуществляет процесс управления на этапе S17.
[0094] Когда текущее положение рассматриваемого транспортного средства достигло положения начала движения в сторону, на этапе S18 контроллер 101 управляет углом рулевого управления рассматриваемого транспортного средства, чтобы начать перемещение рассматриваемого транспортного средства на сторону смежной полосы движения.
[0095] На этапе S19 контроллер 101 измеряет длину (M) области-кандидата на смену полосы движения. На этапе S20 контроллер 101 сравнивает длину (M) области-кандидата на смену полосы движения с заранее определенным порогом определения (Mth) и определяет, равна или превышает длина (M) области-кандидата на смену полосы движения порог определения (Mth). Когда длина (M) области-кандидата на смену полосы движения равна или превышает порогов определения (Mth), на этапе S20 контроллер 101 начинает смену полосы движения функцией блока 105 управления сменой полосы движения. Таким образом, относительная скорость рассматриваемого транспортного средства относительно переднего транспортного средства становится отрицательной, и указатель 80 поворота рассматриваемого транспортного средства приводится в действие в пределах диапазона, в котором мигание указателя 80 поворота видно водителю переднего транспортного средства. В результате водитель переднего транспортного средства информируется о намерении рассматриваемого транспортного средства войти в положение въезда и увеличивает скорость транспортного средства переднего транспортного средства. По мере увеличения скорости транспортного средства переднего транспортного средства длина (M) области кандидата на смену полосы движения увеличивается, и остается достаточно места для смены полосы движения позади переднего транспортного средства. Это позволяет рассматриваемому транспортному средству перемещаться с рассматриваемой полосы движения на смежную полосу движения к положению въезда.
[0096] С другой стороны, когда длина (M) области-кандидата на смену полосы движения меньше порога определения (Mth), контроллер 101 сравнивает время, прошедшее с момента начала мигания указателя 80 поворота, с заранее определенным временем, и определяет, превысило ли истекшее время заданное время. Когда истекшее время истекло, контроллер 101 осуществляет процесс управления этапа S4. Другими словами, когда заранее определенное время истекло с момента начала мигания указателя поворота и длина (M) области-кандидата на смену полосы движения не стала равной или больше, чем порог определения (Mth), контроллер 101 осуществляет управление подготовкой смены полосы движения посредством функции блока 104 подготовки к смене полосы движения, чтобы определить новое положение въезда. Когда истекшее время не превысило заранее заданное время, контроллер 101 осуществляет управление на этапе S21. Контроллер 101 повторно осуществляет контуры управления от этапа S19 до этапа S22.
[0097] Ссылаясь на фиг. 4 будет описана взаимосвязь процесса управления контроллера 101 и сцены движения рассматриваемого транспортного средства и другого транспортного средства. Фиг. 4 показывает пример сцены движения рассматриваемого транспортного средства, когда отсутствует следующее транспортное средство. Сцена движения меняется в порядке от (a) до (d). В частности, транспортное средство, показанное на фиг. 4 - транспортное средство в движении, а фиг. 4 представляет положение транспортного средства в относительном положении. На фиг. с 4 (а) по фиг. 4 (d) полоса L1 указывает рассматриваемую полосу движения, полоса L2 указывает смежную полосу движения, центральная линия C1 указывает центральную линию полосы L1 вдоль направления движения рассматриваемого транспортного средства X, а центральная линия C2 указывает центральную линию полосы L2 вдоль направления движения рассматриваемого транспортного средства X.
[0098] Когда рассматриваемое транспортное средство X проезжает через точку смены полосы движения (не показана), как показано на фиг. 4 (a), контроллер 101 получает информацию об окружающей среде рассматриваемого транспортного средства X от группы 10 датчиков окружающей среды. Контроллер 101 определяет положение P въезда рассматриваемого транспортного средства X на смежной полосе движения из информации об окружающей среде. Контроллер 101 определяет переднее транспортное средство A, расположенное перед положением P въезда, и заднее транспортное средство B, расположенное за положением P въезда, соответственно.
[0099] Контроллер 101 определяет область между передним транспортным средством A и задним транспортным средством B как область-кандидата на смену полосы движения. Контроллер 101 устанавливает положение Q работы указателя поворота в положение впереди переднего транспортного средства A на рассматриваемой полосе движения. Положение Q работы указателя поворота представлено относительным положением с передним концом переднего транспортного средства A в качестве опорной точки O. Положение Q работы указателя поворота, показанное на фиг. 4 (а), является просто примером и особо не ограничивается. Контроллер 101 также устанавливает положение R изменения скорости транспортного средства в положение впереди на заранее определенное расстояние от положения Q работы указателя поворота. Кроме того, контроллер 101 устанавливает положение S начала движения в сторону в положении позади на заранее определенное расстояние от положения работы указателя поворота Q на рассматриваемой полосе движения. Положение S начала движения в сторону представлено относительным положением с передним концом переднего транспортного средства A в качестве опорной точки O
[0100] Контроллер 101 управляет скоростью транспортного средства рассматриваемого транспортного средства X так, чтобы рассматриваемое транспортное средство X было расположено относительно впереди по отношению к положению переднего транспортного средства A. Рассматриваемое транспортное средство X движется впереди переднего транспортного средства A по рассматриваемой полосе движения, и положение рассматриваемого транспортного средства X достигает положения R изменения скорости транспортного средства. Когда положение рассматриваемого транспортного средства X и положение переднего транспортного средства A становятся позиционными отношениями, как показано на фиг. 4 (a), контроллер 101 определяет наличие или отсутствие следующего транспортного средства, которое следует за рассматриваемым транспортным средством X в пределах диапазона заранее определенной области W, расположенной позади рассматриваемого транспортного средства X на рассматриваемой полосе движения. Как показано на фиг. 4 (a), заранее определенная область W установлена так, чтобы включать в себя по меньшей мере область, в которой область-кандидат на смену полосы движения смещена параллельно смежной полосе движения.
[0101] Как показано на фиг. 4 (a), когда отсутствует следующее транспортное средство, контроллер 101 устанавливает время подготовки на заранее определенное время и управляет скоростью транспортного средства рассматриваемого транспортного средства X так, чтобы относительная скорость рассматриваемого транспортного средства X относительно переднего транспортного средства A была отрицательной. Относительная скорость рассматриваемого транспортного средства X относительно переднего транспортного средства A устанавливается в соответствии со временем подготовки.
[0102] Как показано на фиг. 4 (b), когда относительная скорость рассматриваемого транспортного средства относительно переднего транспортного средства A становится отрицательной, рассматриваемое транспортное средство X движется назад относительно переднего транспортного средства A. Другими словами, рассматриваемое транспортное средство X приближается к переднему транспортному средству A вдоль пути движения от положения перед передним транспортным средством A. Когда рассматриваемое транспортное средство X достигло положения Q работы указателя поворота, контроллер 101 управляет указателем 80 поворота. При этом указатель 80 поворота начинает мигать из положения Q работы указателя поворота. В это время водитель переднего транспортного средства А может понимать намерение о смене полосы движения рассматриваемого транспортного средства в положении за передним транспортным средством посредством распознавания того, что рассматриваемое транспортное средство X движется назад относительно переднего транспортного средства A, и указатель 80 поворота рассматриваемого транспортного средства X начал мигать.
[0103] Как показано на фиг. 4 (c), водитель переднего транспортного средства A понимает намерение о смене полосы движения рассматриваемого транспортного средства X и увеличивает скорость транспортного средства переднего транспортного средства. Это приводит к тому, что область-кандидат на смену полосы движения расширяется вперед относительно положения P въезда. Водитель заднего транспортного средства B также понимает намерение смены полосы движения рассматриваемого транспортного средства X в положения впереди заднего транспортного средства B, поскольку рассматриваемое транспортное средство X движется относительно назад с мигающим указателем 80 поворота. Водитель заднего транспортного средства B понимает намерение о смене полосы движения рассматриваемого транспортного средства X и снижает скорость транспортного средства заднего транспортного средства. Это приводит к тому, что область-кандидат на смену полосы движения расширяется назад относительно положения въезда P.
[0104] Кроме того, рассматриваемое транспортное средство X движется назад относительно переднего транспортного средства A в рассматриваемой полосе движения, и положение рассматриваемого транспортного средства X достигает положения S начала движения в сторону. Когда рассматриваемое транспортное средство X достигло положения S начала движения в сторону, контроллер 101 начинает управлять рулевым управлением рассматриваемого транспортного средства, чтобы управлять перемещением рассматриваемого транспортного средства X в сторону смежной полосы движения. В частности, контроллер 101 управляет скоростью транспортного средства рассматриваемого транспортного средства X так, чтобы относительная скорость рассматриваемого транспортного средства X относительно переднего транспортного средства A поддерживалась отрицательной.
[0105] Как показано на фиг. 4 (d), водитель заднего транспортного средства B снижает скорость транспортного средства, чтобы освободить дополнительное пространство перед задним транспортным средством B, поскольку рассматриваемое транспортное средство X движется в сторону смежной полосы движения. В результате область-кандидат на смену полосы движения расширяется назад относительно положения въезда P.
[0106] Контроллер 101 сравнивает длину (M) области-кандидата на смену полосы движения с порогом определения (Mth). В примере на фиг. 4 (d) длина (M) области-кандидата на смену полосы движения соответствует расстоянию от транспортного средства до транспортного средства между передним транспортным средством A и задним транспортным средством B. Когда длина (M) области-кандидата на смену полосы движения равна до или выше порога определения (Mth), контроллер 101 управляет рассматриваемым транспортным средством, чтобы оно переместилось к положению P въезда.
[0107] Обратимся теперь к фиг. 5, здесь будет описана взаимосвязь между процессом управления контроллера 101, когда есть следующее транспортное средство, и сценой движения рассматриваемого транспортного средства и другого транспортного средства. Фиг. 5 показывает пример сцены движения рассматриваемого транспортного средства, когда есть следующее транспортное средство. Сцена движения меняется в порядке от (a) до (d). В частности, транспортное средство, показанное на фиг. 5, как и на фиг. 4 - транспортное средство в движении. Фиг. 5 представляет положение транспортного средства в относительном положении. Переход сцены движения на фиг. С 5 (а) по фиг. 5 (d) соответствует переходу сцены движения на фиг. С 4 (а) по фиг. 4 (г). По этой причине пояснение на фиг. 4 будет использоваться соответственно для деталей на фиг. 5, которые частично совпадают с объяснением с использованием фиг. 4.
[0108] Как показано на фиг. 5 (a), контроллер 101 определяет положение P въезда, переднее транспортное средство A, заднее транспортное средство B и область-кандидат на смену полосы движения. Кроме того, контроллер 101 устанавливает положение Q работы указателя поворота, положение R изменения скорости транспортного средства и положение S начала движения в сторону. Положение Q работы указателя поворота, положение R изменения скорости транспортного средства и положение S начала движения в сторону такие же, как показанные на фиг. 4А. Контроллер 101 управляет скоростью транспортного средства рассматриваемого транспортного средства X так, чтобы рассматриваемое транспортное средство достигло положения R изменения скорости транспортного средства.
[0109] Когда положение рассматриваемого транспортного средства X и положение переднего транспортного средства A становятся позиционными отношениями, как показано на фиг. 5 (a), контроллер 101 определяет наличие следующего транспортного средства, которое следует за рассматриваемым транспортным средством X в пределах диапазона заранее определенной области W, расположенной позади рассматриваемого транспортного средства X на рассматриваемой полосе движения.
[0110] Как показано на фиг. 5 (a), когда следующее транспортное средство Y находится в пределах диапазона заранее определенной области W, контроллер 101 устанавливает время подготовки больше, чем заранее определенное время, и управляет скоростью транспортного средства рассматриваемого транспортного средства X, так, чтобы относительная скорость рассматриваемого транспортного средства X относительно переднего транспортного средства A становится отрицательной. Заранее определенное время совпадает с заранее определенным временем, используемым контроллером 101 для установки времени подготовки в сцене на фиг. 4А. Относительная скорость рассматриваемого транспортного средства X относительно переднего транспортного средства A устанавливается в соответствии со временем подготовки.
[0111] Контроллер 101 устанавливает время подготовки в соответствии со величиной близости между рассматриваемым транспортным средством X и следующим транспортным средством Y. Время подготовки устанавливается большим, когда идет следующее транспортное средство, чем когда следующее транспортное средство отсутствует. Следовательно, когда есть следующее транспортное средство, разница в скорости транспортного средства между скоростью транспортного средства переднего транспортного средства A и скоростью транспортного средства рассматриваемого транспортного средства X будет меньше, чем когда следующее транспортное средство отсутствует. При сравнении относительной скорости, установленной в сцене на фиг. 5 (a), и относительная скорость, установленной в сцене на фиг. 4 (а), относительная скорость, установленная в сцене на фиг. 5 (a) имеет меньшее абсолютное значение, чем относительная скорость, установленная в сцене на фиг. 4 (а).
[0112] Как показано на фиг. 5 (b), когда относительная скорость рассматриваемого транспортного средства X относительно переднего транспортного средства A становится отрицательной, рассматриваемое транспортное средство X движется назад относительно переднего транспортного средства A. В зависимости от наличия или отсутствия следующего транспортного средства указанная выше взаимосвязь происходит в относительной скорости. Следовательно, время, необходимое для перехода от фиг. С 5 (а) по фиг. 5 (b) больше, чем время, необходимое для перехода от фиг. С 4 (а) по фиг. 4 (б). Когда рассматриваемое транспортное средство X достигло положения Q работы указателя поворота, контроллер 101 управляет указателем 80 поворота. Водитель следующего транспортного средства Y может понять намерение о смене полосы движения рассматриваемого транспортного средства X в положение позади переднего транспортного средства A, подтверждая, что рассматриваемое транспортное средство X движется относительно задней части переднего транспортного средства A и что указатель 80 поворота рассматриваемого транспортного средства X начал мигать.
[0113] Как показано на фиг. 5 (c), водитель следующего транспортного средства Y понимает намерение о смене полосы движения рассматриваемого транспортного средства X и снижает скорость транспортного средства следующего транспортного средства Y. Это предотвращает водителя следующего транспортного средства Y от приближения следующего транспортного средства Y к рассматриваемому транспортному средству X против смены полосы движения рассматриваемого транспортного средства X, которая осуществляется при движении назад относительно переднего транспортного средства. Кроме того, в отличие от случая на фиг. 5 (c), даже когда водитель следующего транспортного средства Y не снижает скорость транспортного средства, время, необходимое для переключения с фиг. С 5 (b) по фиг. 5 (c) больше, чем время, необходимое для перехода от фиг. 4 (b) - фиг. 4 (в). Следовательно, устройству 100 управления транспортным средством дается время для определения того, входит ли следующее транспортное средство Y в область-кандидата на смену полосы движения посредством смены полосы движения. Когда устройство 100 управления транспортным средством определяет, что следующее транспортное средство Y войдет в область-кандидата на смену полосы движения, устройство 100 управления транспортным средством может предотвратить приближение рассматриваемого транспортного средства X к следующему транспортному средству Y, увеличивая скорость транспортного средства рассматриваемого транспортного средства X.
[0114] Как описано выше, один или более вариантов осуществления настоящего изобретения порлучает от датчиков, установленных в рассматриваемом транспортном средстве, информацию об окружающей среде рассматриваемого транспортного средства и определяет, на основе информации об окружающей среде, положение въезда, указывающее положение пункта назначения въезда рассматриваемого транспортного средства, при этом положение въезда расположено на смежной полосе движения (второй полосе движения), смежной рассматриваемой полосе движения (первой полосе движения), по которой движется рассматриваемое транспортное средство. Затем, при работе указателя поворота рассматриваемого транспортного средства, замедляет рассматриваемое транспортное средство и осуществляет смену полосы движения, один или более вариантов осуществления настоящего изобретения определяет наличие или отсутствие следующего транспортного средства, которое следует за рассматриваемым транспортным средством, в заранее определенной области, расположенной за рассматриваемым транспортным средством в рассматриваемой полосе движения. При определении наличия следующего транспортного средства, один или более вариантов осуществления настоящего изобретения устанавливает время подготовки больше, чем время подготовки, когда определяет отсутствие следующего транспортного средства, и управляет положением движения рассматриваемого транспортного средства, время подготовки, указывающее время от работы указателя поворота рассматриваемого транспортного средства до замедления рассматриваемого транспортного средства и начала смены полосы движения рассматриваемого транспортного средства. Таким образом, один или более вариантов осуществления настоящего изобретения дает водителю следующего транспортного средства время, чтобы подтвердить поведение рассматриваемого транспортного средства, даже когда в сцене замедления рассматриваемого транспортного средства находится следующее транспортное средство, чтобы осуществить смену полосы движения. Кроме того, поскольку при наличии следующего транспортного средства время, необходимое для информирования других транспортных средств о намерении смены полосы движения, также больше, чем при отсутствии следующего транспортного средства, пространство позади переднего транспортного средства становится шире, тем самым создавая дорожную среду, в которой рассматриваемому транспортному средству легче выехать на смежную полосу движения.
[0115] Кроме того, один или более вариантов осуществления настоящего изобретения при определении наличия следующего транспортного средства, устанавливает замедление рассматриваемого транспортного средства при замедлении рассматриваемого транспортного средства меньшим, чем замедление, при определении отсутствия следующего транспортного средства с большим запасом времени. Это снижает скорость, с которой рассматриваемое транспортное средство замедляется, поэтому, даже если рассматриваемое транспортное средство приближается к следующему транспортному средству, водитель следующего транспортного средства может реагировать на поведение рассматриваемого транспортного средства с большим запасом времени. В результате можно уменьшить беспокойство и дискомфорт, которые испытывает водитель следующего транспортного средства.
[0116] Кроме того, один или более вариантов осуществления настоящего изобретения вычисляет величину близости между рассматриваемым транспортным средством и следующим транспортным средством и устанавлиает замедление рассматриваемого транспортного средства на основе величины близости. Это замедляет рассматриваемое транспортное средство со скоростью транспортного средства, которая соответствует позиционному отношению между рассматриваемым транспортным средством и следующим транспортным средством. Например, это может предотвратить рассматриваемое транспортное средство от снижения на излишне низкой скорости, когда следующее транспортное средство движется относительно назад по отношению к рассматриваемому транспортному средству. В результате можно уменьшить беспокойство и дискомфорт, которые испытывает водитель следующего транспортного средства.
[0117] В качестве модификации одного или более вариантов осуществления настоящего изобретения контроллер 101 может устанавливать скорость транспортного средства рассматриваемого транспортного средства, когда рассматриваемое транспортное средство перемещается из положения работы указателя поворота в положение начала движения в сторону, и скорость транспортного средства рассматриваемого транспортного средства до тех пор, пока рассматриваемое транспортное средство не переместится из положения начала движения в сторону и не начнет смену полосы движения, соответственно. Когда определяется наличие следующего транспортного средства, контроллер 101 устанавливает более низкую скорость транспортного средства рассматриваемого транспортного средства до тех пор, пока рассматриваемое транспортное средство не переместится из положения начала движения в сторону и не начнет смену полосы движения, чем когда определено, что следующее транспортное средство отсутствует. Другими словами, когда определяется наличие следующего транспортного средства, контроллер 101 устанавливает более низкую скорость транспортного средства рассматриваемого транспортного средства при перемещении рассматриваемого транспортного средства на сторону смежной полосы движения к центральной линии рассматриваемой полосы движения вдоль направления движения рассматриваемого транспортного средства, чем когда определено отсутствие следующего транспортного средства. Таким образом, время, необходимое для того, чтобы рассматриваемое транспортное средство переместилось из положения начала движения в сторону на сторону смежной полосы движения, увеличивается, и водитель следующего транспортного средства может реагировать на поведение рассматриваемого транспортного средства с большим запасом времени. В результате можно уменьшить беспокойство и дискомфорт, которые испытывает водитель следующего транспортного средства.
[0118] Контроллер 101 может устанавливать скорость транспортного средства рассматриваемого транспортного средства, когда рассматриваемое транспортное средство перемещается из положения работы указателя поворота в положение начала движения в сторону, до скорости транспортного средства рассматриваемого транспортного средства, когда следующее транспортное средство отсутствует. Контроллер 101 может также устанавливать скорость транспортного средства рассматриваемого транспортного средства до тех пор, пока рассматриваемое транспортное средство не переместится из положения начала движения в сторону и не начнет смену полосы движения, на скорость транспортного средства рассматриваемого транспортного средства, когда есть следующее транспортное средство. Другими словами, контроллеру 101 может потребоваться установленное время подготовки, чтобы подготовить смену полосы движения рассматриваемого транспортного средства. Кроме того, контроллер 101 может управлять скоростью транспортного средства рассматриваемого транспортного средства в любом элементе управления или любой сцене между временем, когда включается указатель поворота, и временем, когда начинается смена полосы движения.
[0119] В качестве другой модификации, контроллер 101 может прекратить осуществление управления подготовкой к смене полосы движения, когда удовлетворяется заранее определенное условие.
[0120] Например, контроллер 101 прекращает осуществление управления подготовкой к смене полосы движения, когда величина близости между рассматриваемым транспортным средством и следующим транспортным средством превышает заранее определенное первое пороговое значение. Заранее определенное первое пороговое значение - это пороговое значение, которое водитель следующего транспортного средства чувствует близко к рассматриваемому транспортному средству, которое определяется экспериментально. Например, заранее определенное первое пороговое значение является значением, соответствующим скорости транспортного средства рассматриваемого транспортного средства, а первое пороговое значение является значением, заранее сохраненным в запоминающем устройстве, таком как ПЗУ. Когда рассматриваемое транспортное средство и следующее транспортное средство приближаются до такой степени, что водитель следующего транспортного средства чувствует, что они приближаются, контроллер 101 прекращает осуществление управления подготовкой для смены полосы движения. Это прекращает движение рассматриваемого транспортного средства, которое движется назад относительно переднего транспортного средства, тем самым уменьшая дискомфорт, доставляемый водителю следующего транспортного средства.
[0121] Кроме того, например, контроллер 101 прекращает осуществление управления подготовкой к смене полосы движения, когда следующее транспортное средство движется по стороне смежной полосы движения относительно центральной линии рассматриваемой полосы движения вдоль направления движения рассматриваемого транспортного средства. Причина, по которой следующее транспортное средство движется по смежной полосе движения, заключается в том, что следующее транспортное средство пытается войти в положение въезда в области-кандидате на смену полосы движения посредством смены полосы движения. Когда следующее транспортное средство готовится к смене полосы движения до того, как рассматриваемое транспортное средство готовится к смене полосы движения, контроллер 101 также может предотвратить въезд рассматриваемого транспортного средства в то же положение посредством смены полосы движения и тем самым уменьшая беспокойство и дискомфорт у водителя следующего транспортного средства.
[0122] Кроме того, например, контроллер 101 прекращает осуществление управления подготовкой к смене полосы движения, когда величина близости между рассматриваемым транспортным средством и следующим транспортным средством изменилась с заранее определенного второго порогового значения или больше до меньшего, чем второе пороговое значение при замедлении рассматриваемого транспортного средства. Заранее определенный второй порог - это расстояние между рассматриваемым транспортным средством и следующим транспортным средством, которое достаточно для рассматриваемого транспортного средства, чтобы осуществить смену полосы движения, пока рассматриваемое транспортное средство замедляется, и представляет собой значение, которое определяется экспериментально. Например, заранее определенное второе пороговое значение является значением, соответствующим скорости транспортного средства рассматриваемого транспортного средства, и является значением, заранее сохраненным в запоминающем устройстве, таком как ПЗУ. Когда величина близости между рассматриваемым транспортным средством и следующим транспортным средством изменяется в меньшей степени, в то время как рассматриваемое транспортное средство замедляется, управление подготовкой к смене полосы движения прекращается. Например, одна из причин того, что величина близости изменяется в меньшей степени, заключается в том, что водитель следующего транспортного средства понимает намерение о смене полосы движения рассматриваемого транспортного средства в положении позади переднего транспортного средства и снижает скорость транспортного средства следующего транспортного средства. Это предотвращает сохранение медленного состояния скорости, с которой рассматриваемое транспортное средство замедляется, после того, как водитель следующего транспортного средства замедлил движение следующего транспортного средства. Дискомфорт для водителя следующего транспортного средства может быть уменьшен. В частности, контроллер 101 может продолжить управление подготовкой к смене полосы движения после сброса времени ожидания на заранее определенное время, не прекращая осуществление управления подготовкой к смене полосы движения.
[0123] Кроме того, например, контроллер 101 может также измерять расстояние от транспортного средства до транспортного средства между передним транспортным средством и задним транспортным средством в заранее определенном цикле, осуществляя управление подготовкой к смене полосы движения, и измерять изменение в расстояние от транспортного средства до транспортного средства с прошедшим временем. Контроллер 101 может прекратить осуществление управления подготовкой к смене полосы движения, когда расстояние от транспортного средства до транспортного средства между передним транспортным средством и задним транспортным средством за единицу времени изменяется в направлении сокращения. Это может предотвратить осуществление смены полосы движения на заднюю часть переднего транспортного средства, даже если пространство, которое должно быть пунктом назначения въезда для рассматриваемого транспортного средства, изменяется в сторону меньшего.
[0124] Кроме того, например, контроллер 101 может получать скорость транспортного средства переднего транспортного средства в заранее определенный период при осуществлении управления подготовкой к смене полосы движения и отслеживать размер переднего пространства, расположенного перед передним транспортным средством. Контроллер 101 может прекратить осуществление управления подготовкой к смене полосы движения, когда скорость транспортного средства переднего транспортного средства замедляется и длина переднего пространства становится равной или превышающей порог определения. Длина переднего пространства - это длина в направлении, в котором движется рассматриваемое транспортное средство. Это может предотвратить смену полосы движения позади переднего транспортного средства, даже если рассматриваемого транспортного средства может въехать в переднее пространство.
[0125] В качестве другой модификации, контроллер 101 может также управлять моментом начала, когда рассматриваемое транспортное средство движется назад относительно переднего транспортного средства, в соответствии со величиной близости между рассматриваемым транспортным средством и следующим транспортным средством. В частности, контроллер 101 управляет скоростью транспортного средства рассматриваемого транспортного средства до положения изменения скорости транспортного средства в соответствии со величиной близости между рассматриваемым транспортным средством и следующим транспортным средством. Например, контроллер 101 устанавливает скорость транспортного средства рассматриваемого транспортного средства до положения изменения скорости транспортного средства так, чтобы скорость транспортного средства рассматриваемого транспортного средства соответствовала скорости транспортного средства следующего транспортного средства, когда величина близости между рассматриваемым транспортным средством и следующее транспортное средство равна или больше заранее определенного третьего порогового значения. Заранее определенное третье пороговое значение - это пороговое значение, которое водитель следующего транспортного средства чувствует близко к рассматриваемому транспортному средству, которое определяется экспериментально. Отметим, что заранее определенное третье пороговое значение может быть тем же самым значением, что и заданное первое пороговое значение, описанное выше, или отличаться от него. Приведение скорости транспортного средства рассматриваемого транспортного средства в соответствие со скоростью транспортного средства следующего транспортного средства также включает в себя установку скорости транспортного средства рассматриваемого транспортного средства равной той же скорости транспортного средства, что и скорость транспортного средства следующего транспортного средства, и установку скорости транспортного средства рассматриваемого транспортного средства равной скорость транспортного средства в пределах заранее определенного диапазона ошибок для скорости транспортного средства следующего транспортного средства. Контроллер 101 управляет скоростью транспортного средства рассматриваемого транспортного средства, так что рассматриваемое транспортное средство достигает положения изменения скорости транспортного средства после того, как скорость транспортного средства рассматриваемого транспортного средства соответствует скорости транспортного средства следующего транспортного средства. Когда рассматриваемое транспортное средство достигло положения изменения скорости транспортного средства, контроллер 101 устанавливает скорость транспортного средства рассматриваемого транспортного средства так, чтобы относительная скорость рассматриваемого транспортного средства относительно переднего транспортного средства стала отрицательной. Это дает приоритет обеспечению расстояния от транспортного средства до транспортного средства между рассматриваемым транспортным средством и следующим транспортным средством, а не управлению рассматриваемым транспортным средством для осуществления смены полосы движения позади переднего транспортного средства, таким образом, можно уменьшить беспокойство и дискомфорт, испытываемые водителем следующего транспортного средства.
[0126] Объясненные выше варианты осуществления изобретения описаны для облегчения понимания настоящего изобретения и не описаны для ограничения настоящего изобретения. Поэтому предполагается, что элементы, раскрытые в вышеуказанных вариантах осуществления изобретения, включают в себя все изменения в конструкции и эквиваленты, подпадающие под объем технических сведений настоящего изобретения.
[0127] Например, в вышеописанном варианте осуществления изобретения приведена конфигурация, которая устанавливает положение изменения скорости транспортного средства и положение работы указателя поворота перед передним транспортным средством на рассматриваемой полосе движения, но конфигурация не ограничивается установкой положение переключения скорости транспортного средства и положением работы указателя поворота перед передним транспортным средством. Например, контроллер 101 может устанавливать положение изменения скорости транспортного средства перед передним транспортным средством и положение работы указателя поворота за передним транспортным средством на рассматриваемой полосе движения. Также, например, контроллер 101 может устанавливать положение изменения скорости транспортного средства и положение работы указателя поворота позади переднего транспортного средства на рассматриваемой полосе движения. Задняя часть переднего транспортного средства включает в себя, например, область, где область-кандидат на смену полосы движения смещена параллельно рассматриваемой полосе движения. Установка положения изменения скорости транспортного средства и положения работы указателя поворота перед передним транспортным средством позволяет рассматриваемому транспортному средству информировать водителя переднего транспортного средства о намерении смены полосы движения рассматриваемого транспортного средства в направлении задней части переднего транспортного средства, но в настоящем изобретении нет необходимости информировать переднее транспортное средство о намерении смены полосы движения рассматриваемого транспортного средства. Другими словами, настоящее изобретение разработано, чтобы дать водителю следующего транспортного средства больше времени для подтверждения ситуации впереди в сцене, где рассматриваемое транспортное средство движется назад относительно переднего транспортного средства и осуществляет смену полосы движения, и не зависит от того, информирован или водитель переднего транспортного средства о намерении смены полосы движения. Следовательно, настоящее изобретение также может применяться к сценам, в которых смена полосы движения осуществляется сзади переднего транспортного средства без информирования водителя переднего транспортного средства о намерении смены полосы движения.
[0128] Кроме того, например, в вышеописанном варианте осуществления изобретения конфигурация, которая устанавливает переход в положение начала движения в сторону и осуществляет управление перемещением на сторону перед осуществлением управления сменой полосы движения, была описана в качестве примера, но управление движением в сторону не обязательно должно осуществляться.
[0129] Кроме того, например, в вышеописанном варианте осуществления изобретения сцена, в которой осуществляется смена полосы движения, когда рассматриваемое транспортное средство движется назад относительно переднего транспортного средства, была описана в качестве примера, но присутствие переднего транспортного средства возможно требуется в сцене смены полосы движения рассматриваемого транспортного средства. В качестве управления положением движения рассматриваемого транспортного средства на рассматриваемой полосе движения во время подготовки блок 104 подготовки к смене полосы движения может управлять скоростью транспортного средства рассматриваемого транспортного средства, например, так, чтобы рассматриваемое транспортное средство не приближалось к следующему транспортному средству пока не начнется смена полосы движения. Например, блок 104 подготовки к смене полосы движения управляет скоростью транспортного средства рассматриваемого транспортного средства, чтобы поддерживать расстояние от транспортного средства до транспортного средства между рассматриваемым транспортным средством и следующим транспортным средством. Блок 104 подготовки к смене полосы движения также может управлять скоростью транспортного средства рассматриваемого транспортного средства так, чтобы относительная скорость относительно следующего транспортного средства находилась в пределах заранее определенного диапазона. Напр00имер, блок 104 подготовки к смене полосы движения может управлять скоростью транспортного средства рассматриваемого транспортного средства так, чтобы замедление было относительно меньшим, чем при замедлении рассматриваемого транспортного средства во время смены полосы движения.
[0130] Например, в настоящем описании устройство управления транспортным средством согласно настоящему изобретению описано на примере устройства 100 управления транспортным средством, но настоящее изобретение этим не ограничивается. Кроме того, в настоящем описании первая полоса движения в соответствии с настоящим изобретением описана с использованием рассматриваемой полосы движения в качестве примера, но настоящее изобретение этим не ограничивается. Кроме того, в настоящем описании вторая полоса движения согласно настоящему изобретению описывается с использованием смежной полосы движения, но настоящее изобретение этим не ограничивается.
[ПОЯСНЕНИЯ ССЫЛОЧНЫХ ПОЗИЦИЙ]
[0131] 10 ... Группа датчиков окружающей среды
11 ... Радар
12 ... Устройство визуализации
20... Группа датчиков транспортного средства
30 ... Навигационная система
40 ... База данных карт
50 ... Интерфейс человек - машина
60 ... Контроллер исполнительного механизма
70 ... Группа исполнительных механизмов системы управления транспортным средством
80 ... Указатель поворота
100 ... Устройство управления транспортным средством
101 ... Контроллер
102 ... Блок получения информации
103 ... Блок указания точки смены полосы движения
104 ... Блок подготовки к смене полосы движения
105 ... Блок управления сменой полосы движения
200 ... Система транспортного средства

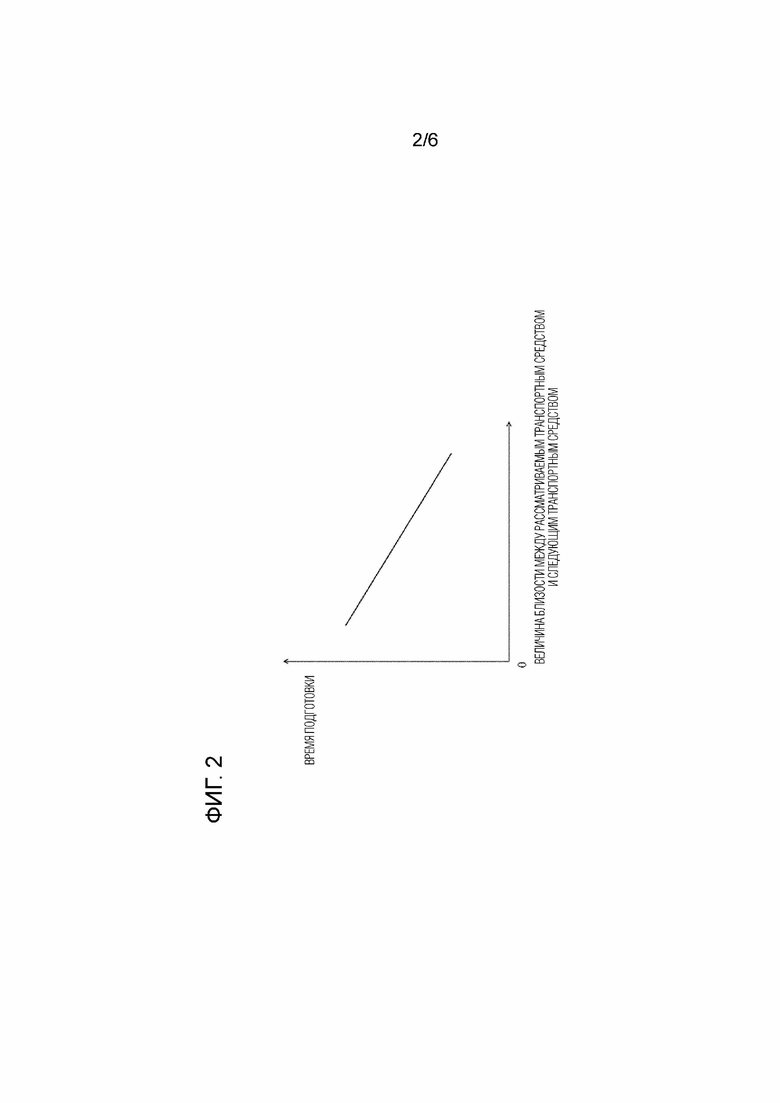

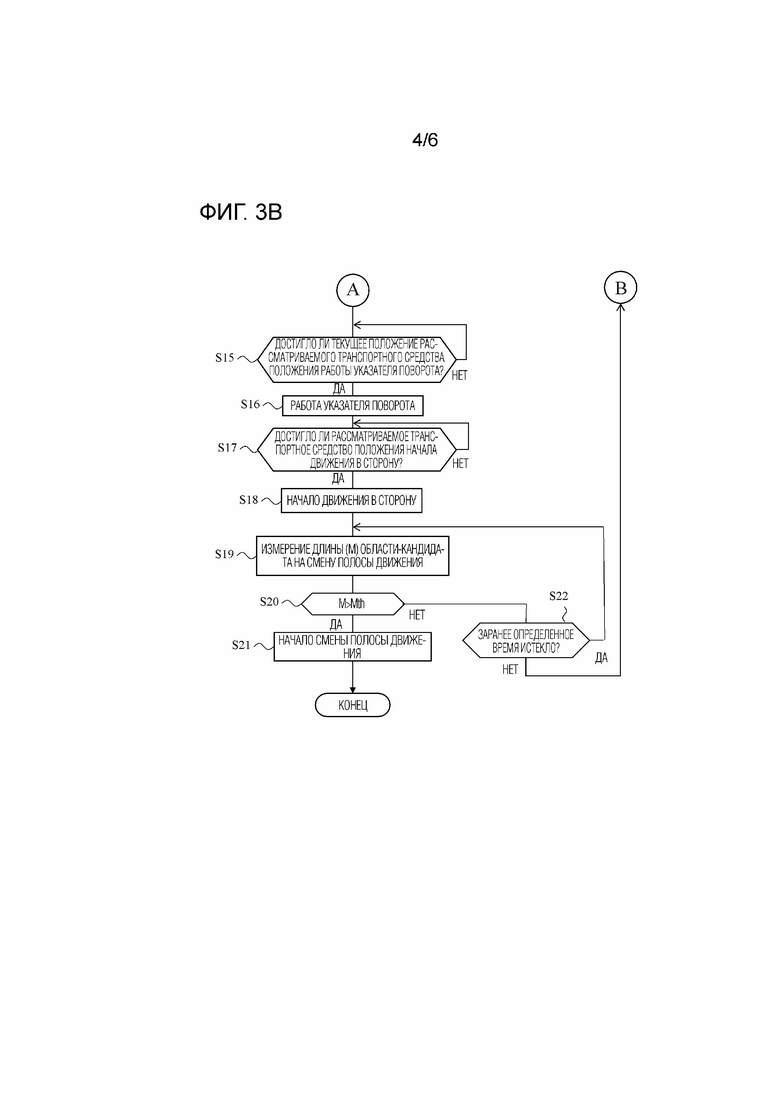
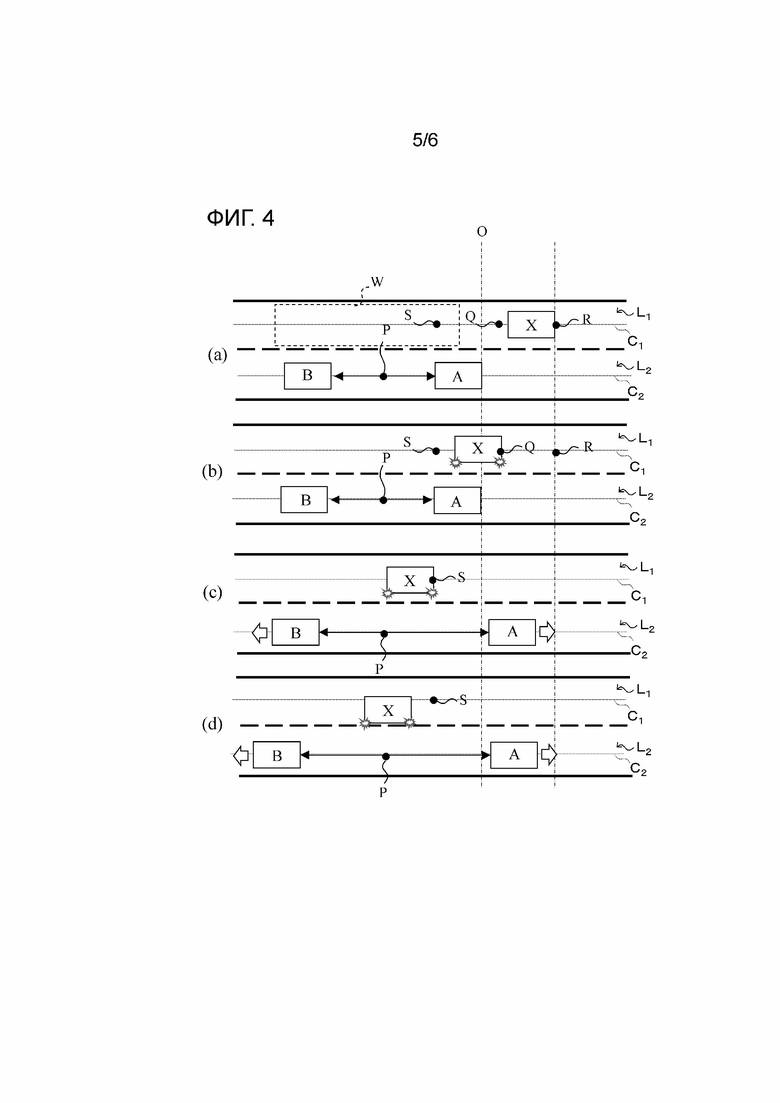
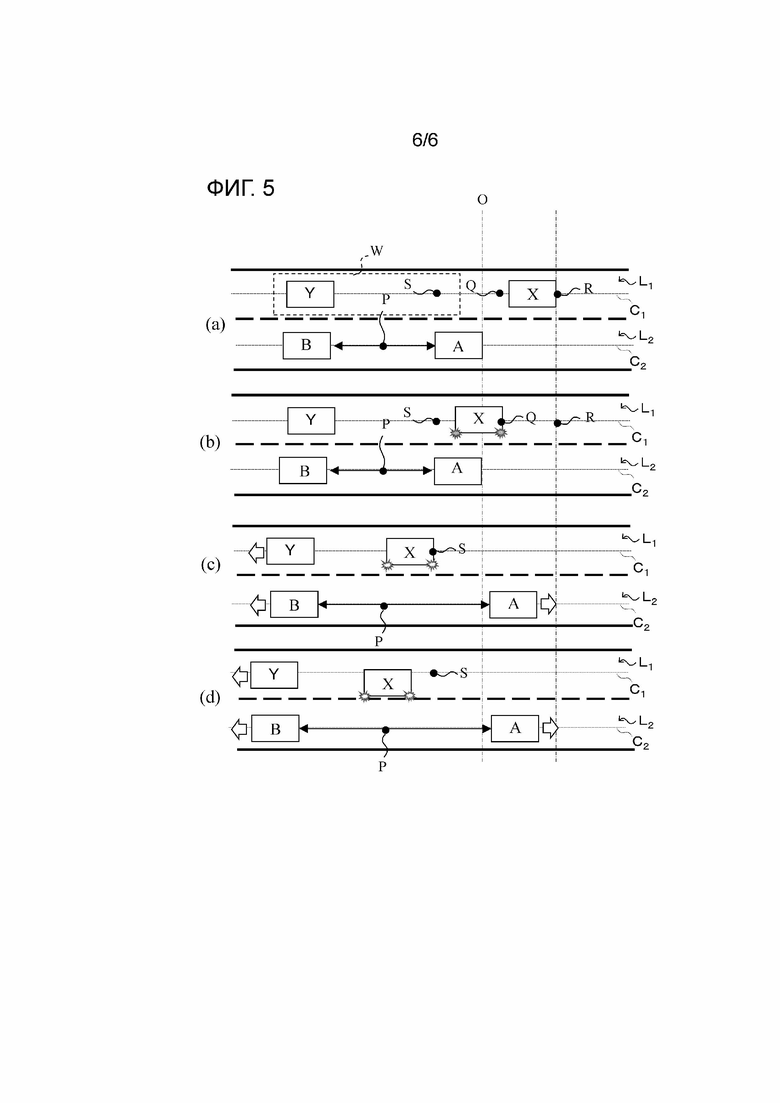
Изобретение относится к способу управления транспортным средством. Способ управления транспортным средством содержит этап получения от датчиков информации об окружающей среде рассматриваемого транспортного средства, определение положения въезда, указывающего положение пункта назначения въезда рассматриваемого транспортного средства, при этом положение въезда расположено на второй полосе движения, смежной первой полосе движения, по которой движется рассматриваемое транспортное средство. При работе указателя поворота рассматриваемого транспортного средства замедление рассматриваемого транспортного средства и осуществление смены полосы движения, определение наличия или отсутствия следующего транспортного средства, которое следует за рассматриваемым транспортным средством, в заранее определенной области. При определении наличия следующего транспортного средства установку времени подготовки больше, чем время подготовки при определении отсутствия следующего транспортного средства. Причем время подготовки указывает время от работы указателя поворота рассматриваемого транспортного средства до замедления рассматриваемого транспортного средства и начала смены полосы движения рассматриваемого транспортного средства. Достигается повышение безопасности. 2 н. и 7 з.п. ф-лы, 6 ил.
1. Способ управления транспортным средством, осуществляемый процессором, выполненным с возможностью осуществления смены полосы движения рассматриваемого транспортного средства, содержащий:
получение от датчиков, установленных в рассматриваемом транспортном средстве, информации об окружающей среде рассматриваемого транспортного средства;
определение, на основе информации об окружающей среде, положения въезда, указывающего положение пункта назначения въезда рассматриваемого транспортного средства, при этом положение въезда расположено на второй полосе движения, смежной первой полосе движения, по которой движется рассматриваемое транспортное средство;
при работе указателя поворота рассматриваемого транспортного средства замедление рассматриваемого транспортного средства и осуществление смены полосы движения, определение наличия или отсутствия следующего транспортного средства, которое следует за рассматриваемым транспортным средством, в заранее определенной области, расположенной позади рассматриваемого транспортного средства на первой полосе движения,
при определении наличия следующего транспортного средства установку времени подготовки больше, чем время подготовки при определении отсутствия следующего транспортного средства, причем время подготовки, указывает время от работы указателя поворота рассматриваемого транспортного средства до замедления рассматриваемого транспортного средства и начала смены полосы движения рассматриваемого транспортного средства; и
управление положением движения рассматриваемого транспортного средства на первой полосе движения в течение времени подготовки.
2. Способ управления транспортным средством по п. 1, содержащий:
при определении наличия следующего транспортного средства установку замедления рассматриваемого транспортного средства при замедлении рассматриваемого транспортного средства, меньшем, чем замедление, при определении отсутствия следующего транспортного средства.
3. Способ управления транспортным средством по п. 1 или 2, содержащий:
при определении наличия следующего транспортного средства установку скорости транспортного средства рассматриваемого транспортного средства при движении рассматриваемого транспортного средства на сторону второй полосы движения относительно центральной линии первой полосы движения вдоль направления движения рассматриваемого транспортного средства, меньшей, чем скорость транспортного средства при определении отсутствия следующего транспортного средства.
4. Способ управления транспортным средством по п. 2, содержащий:
вычисление величины близости между рассматриваемым транспортным средством и следующим транспортным средством; и
установку замедления рассматриваемого транспортного средства на основе величины близости.
5. Способ управления транспортным средством по любому из пп. 1-4, содержащий:
вычисление величины близости между рассматриваемым транспортным средством и следующим транспортным средством; и
когда величина близости равна или превышает первое пороговое значение, прекращение осуществления управления положением движения рассматриваемого транспортного средства на первой полосе движения.
6. Способ управления транспортным средством по любому из пп. 1-5, содержащий:
при движении следующего транспортного средства по стороне второй полосы движения относительно центральной линии первой полосы движения вдоль направления движения рассматриваемого транспортного средства прекращение осуществления управления положением движения рассматриваемого транспортного средства на первой полосе движения.
7. Способ управления транспортным средством по любому из пп. 1-6, содержащий:
вычисление величины близости между рассматриваемым транспортным средством и следующим транспортным средством; и
когда, при замедлении рассматриваемого транспортного средства, величина близости изменилась со значения, которое равно или превышает второе пороговое значение, на значение, которое ниже, чем второе пороговое значение, установку времени подготовки на время, когда отсутствует следующее транспортное средство.
8. Способ управления транспортным средством по любому из пп. 1-7, содержащий:
вычисление величины близости между рассматриваемым транспортным средством и следующим транспортным средством;
когда величина близости равна или превышает третье пороговое значение, установку скорости транспортного средства рассматриваемого транспортного средства так, чтобы скорость транспортного средства рассматриваемого транспортного средства соответствовала скорости транспортного средства следующего транспортного средства; и
после того, как скорость транспортного средства рассматриваемого транспортного средства соответствует скорости транспортного средства следующего транспортного средства, осуществление начала управления для замедления рассматриваемого транспортного средства.
9. Устройство управления транспортным средством, содержащее устройство управления, выполненное с возможностью осуществления смены полосы движения рассматриваемого транспортного средства, при этом
устройство управления выполнено с возможностью:
получения от датчиков, установленных в рассматриваемом транспортном средстве, информации об окружающей среде рассматриваемого транспортного средства,
определения на основе информации об окружающей среде положения въезда, указывающего положение пункта назначения въезда рассматриваемого транспортного средства, при этом положение въезда расположено на второй полосе движения, смежной первой полосе движения, по которой движется рассматриваемое транспортное средство,
при работе указателя поворота рассматриваемого транспортного средства замедления рассматриваемого транспортного средства и осуществления смены полосы движения, определения наличия или отсутствия следующего транспортного средства, которое следует за рассматриваемым транспортным средством, в заранее определенной области, расположенной позади рассматриваемого транспортного средства на первой полосе движения,
при определении наличия следующего транспортного средства установки времени подготовки больше, чем время подготовки при определении отсутствия следующего транспортного средства, времени подготовки, указывающего время от работы указателя поворота рассматриваемого транспортного средства до замедления рассматриваемого транспортного средства и начала смена полосы движения рассматриваемого транспортного средства, и
управления положением движения рассматриваемого транспортного средства по первой полосе движения в течение времени подготовки.
| US 20180293894 A1, 11.10.2018 | |||
| JP 6387910 B2, 12.09.2018 | |||
| JP 6323385 B2, 08.12.2016 | |||
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПОЗИЦИИ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ОПРЕДЕЛЕНИЯ ПОЗИЦИИ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2667675C1 |

