[Область техники]
[0001]
Настоящее изобретение относится к способу управления парковкой и устройству управления парковкой.
[Уровень техники]
[0002]
Известна технология, в которой транспортное средство движется с низкой скоростью транспортного средства, когда регулируется положение парковки транспортного средства (патентный документ 1).
[Документ предшествующего уровня техники]
[Патентный Документ]
[0003]
[Патентный Документ 1] JP2006-306233A
[Сущность изобретения]
[Проблемы, решаемые изобретением]
[0004]
Однако в вышеприведенном уровне техники транспортное средство движется со скоростью, которая неизменно снижается независимо от разности высот между оператором и транспортным средством, и поэтому проблема заключается в том, что работоспособность при удаленной парковке не может быть обеспечена при наличии разности высот.
[0005]
Задача, которая должна быть решена с помощью настоящего изобретения, заключается в выполнении дистанционного управления парковкой с высокой работоспособностью, даже когда существует разность высот между оператором и транспортным средством.
[Средства для решения проблем]
[0006]
Настоящее изобретение решает вышеупомянутую проблему путем изменения первой скорости на вторую скорость, меньшую, чем первая скорость, когда относительная высота между положением по высоте оператора и положением по высоте транспортного средства не меньше, чем первое предварительно определенное значение. Первая скорость предварительно установлена в инструкции управления для перемещения транспортного средства по маршруту парковки.
[Эффект, достигаемый изобретением]
[0007]
Согласно настоящему изобретению дистанционное управление парковкой может быть выполнено с высокой работоспособностью, даже когда существует разность высот между оператором и транспортным средством.
[Краткое описание чертежей]
[0008]
Фиг. На фиг. 1 показана блок-схема, иллюстрирующая пример системы управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения.
Фиг. 2А - схема для описания первой схемы обнаружения положения оператора.
Фиг. 2B - схема для описания второй схемы обнаружения положения оператора.
Фиг. 2C - схема для описания третьей схемы обнаружения положения оператора.
Фиг. 2D - схема для описания четвертой схемы обнаружения положения оператора.
Фиг. 3А - схема для описания первой схемы обнаружения препятствия.
Фиг. 3B - схема для описания второй схемы обнаружения препятствия.
Фиг. 4A - первая схема для описания отношений между транспортным средством и оператором.
Фиг. 4B - вторая диаграмма для описания отношений между транспортным средством и оператором.
Фиг. 4C - третья схема для описания отношений между транспортным средством и оператором.
Фиг. 5А - схема, иллюстрирующая транспортные средства, видимые от оператора, расположенного в первом положении.
Фиг. 5B - схема, иллюстрирующая транспортные средства, видимые от оператора, расположенного во второй положения.
Фиг. 5C - схема, иллюстрирующая транспортные средства, видимые от оператора, расположенного в третьей положения.
Фиг. 5D - схема, иллюстрирующая транспортные средства, видимые от оператора, расположенного в четвертом положении.
На фиг. 6 показана блок-схема последовательности операций, иллюстрирующая пример процедуры управления, выполняемой системой управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения.
Фиг. 7А - схема, иллюстрирующая пример взаимосвязи между относительной высотой HT и второй скоростью MV.
Фиг. 7B является схемой, иллюстрирующей пример взаимосвязи между расстоянием D и коэффициентом.
Фиг. 8А - схема, иллюстрирующая первый пример отображения на операционном терминале в соответствии с относительной высотой HT.
Фиг. 8B - схема, иллюстрирующая второй пример отображения на операционном терминале в соответствии с относительной высотой HT.
Фиг. 8C является схемой, иллюстрирующей третий пример отображения на операционном терминале в соответствии с относительной высотой HT.
Фиг. 9 - блок-схема последовательности операций, иллюстрирующая пример процесса установки инструкции управления.
На фиг. 10 показана схема, иллюстрирующая пример инструкции управления, в которой целевая скорость TV определена в каждой точке маршрута RT парковки.
[Вариант(ы) осуществления настоящего изобретения]
[0009]
Далее один или несколько вариантов осуществления настоящего изобретения будут описаны со ссылкой на чертежи.
В вариантах осуществления настоящее изобретение будет описано посредством примера случая, в котором устройство управления парковкой в соответствии с настоящим изобретением применяется к системе управления парковкой. Устройство управления парковкой также может быть применено к портативному операционному терминалу (оборудованию, такому как смартфон или КПК: Персональный цифровой помощник), способный обмениваться информацией с бортовой аппаратурой. Способ управления парковкой в соответствии с настоящим изобретением может использоваться в устройстве управления парковкой, которое будет описано ниже.
[0010]
Фиг. На фиг.1 показана блок-схема системы 1000 управления парковкой, включающей в себя устройство 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения. Система 1000 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения включает в себя камеры 1a-1d, дальномерные устройства 2, информационный сервер 3, операционный терминал 5, устройство 100 управления парковкой, контроллер 70 транспортного средства, систему 40 привода, датчик 50 угла поворота рулевого управления и датчик 60 скорости транспортного средства. Устройство 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения управляет операцией перемещения (парковки) транспортного средства в парковочное место на основе операционной команды, которая вводится из операционного терминала 5.
[0011]
Операционный терминал 5 представляет собой портативный компьютер, который может быть выведен наружу из транспортного средства и имеет функцию ввода и функцию связи. Операционный терминал 5 принимает ввод операционной команды, сделанной оператором M для управления вождением (работой) транспортного средства для парковки. Движение включает в себя операции для парковки (операции для въезда на парковочное место и выезда из парковочного места). Оператор M вводит инструкции через операционный терминал 5. Инструкции включают в себя операционную команду парковкой транспортного средства в качестве цели управления. Операционная команда включает в себя информацию о выполнении/остановке управления парковкой, выборе/изменении целевого парковочного места и выборе/изменении маршрута парковки и другую информацию, необходимую для парковки. Оператор M также может заставить устройство 100 управления парковкой распознавать инструкции, включающие в себя операционную команду, без использования операционного терминала 5, например, жестом, сделанным оператором M (то есть оператор M может вводить такие инструкции в устройство 100 управления парковкой без использования операционного терминала 5 (например, жестом).
Операционный терминал 5 включает в себя устройство связи и способен обмениваться информацией с устройством 100 управления парковкой и информационным сервером 3. Операционный терминал 5 передает операционную команду, которая вводится вне транспортного средства, в устройство 100 управления парковкой через сеть связи и вводит операционную команду в устройство 100 управления парковкой. Операционный терминал 5 осуществляет связь с устройством 100 управления парковкой, используя сигналы, включающие в себя уникальный код идентификации.
Операционный терминал 5 включает в себя дисплей 53. Дисплей 53 представляет интерфейс ввода и различные элементы информации. Когда дисплей 53 является дисплеем типа панели с сенсорным управлением, он имеет функцию приема операционной команды.
Операционный терминал 5 можеты быть портативным оборудованием, таким как смартфон или КПК: Персональный цифровой помощник, в котором установлены приложения для приема ввода операционной команды, используемой в способе управления парковкой, в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, и передачи операционной команды на устройство 100 управления парковкой.
[0012]
Информационный сервер 3 является устройством предоставления информации, предоставляемым в сети, допускающей связь. Информационный сервер включает в себя устройство 31 связи и запоминающее устройство 32. Запоминающее устройство 32 включает в себя считываемую картографическую информацию 33, информацию 34 о парковке и информацию 35 о препятствиях. Устройство 100 управления парковкой и операционный терминал 5 могут осуществлять доступ к запоминающему устройству 32 информационного сервера 3 для получения каждого элемента информации.
[0013]
Устройство 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения включает в себя устройство 10 управления, устройство 20 ввода и устройство 30 вывода. Эти компоненты устройства 100 управления парковкой соединены друг с другом через локальную сеть контроллеров (CAN) или другую бортовую локальную сеть для взаимного обмена информацией. Устройство 20 ввода включает в себя устройство 21 связи. Устройство 21 связи принимает операционную команду, переданную от внешнего операционного терминала 5, и вводит операционную команду в устройство 20 ввода. Субъектом, который вводит операционную команду на внешний операционный терминал 5, может быть человек (пользователь, пассажир, водитель или работник парковки). Устройство 20 ввода передает принятую операционную команду на устройство 10 управления. Устройство 30 вывода включает в себя дисплей 31. Устройство 30 вывода уведомляет водителя об информации управления парковкой. Дисплей 31 в соответствии с одним или несколькими вариантами осуществления настоящего изобретения представляет собой дисплей типа панели с сенсорным управлением, имеющий функцию ввода и функцию вывода. Когда дисплей 31 имеет функцию ввода, он служит в качестве устройства 20 ввода. Даже когда транспортное средство управляется на основе операционной команды, которая вводится с операционного терминала 5, человек, занимающий место в транспортном средстве (водитель или пассажир), может вводить операционную команду, такую как команда для экстренной остановки, через устройство 20 ввода.
[0014]
Устройство 10 управления устройства 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения представляет собой компьютер для управления парковкой, включающий в себя ПЗУ 12, в котором хранится программа управления парковкой, ЦП 11 в качестве операционной схемы, которая исполняет сохраненную в ПЗУ 12 программу для того, чтобы служить в качестве устройства 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения, и ОЗУ 13, которое служит в качестве доступного запоминающего устройства.
[0015]
Программа управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения включает в себя программу для определения относительной высоты/высоты между первым положением по высоте оператора M (первой высотой положения, где оператор M находится/существовал) и вторым положением по высоте транспортного средства V (второй высотой положения, где транспортное средство V находится/существовало) в качестве цели управления; когда относительная высота/высота не меньше, чем первое предварительно определенное значение, изменения первой скорости, которая предварительно установлена в инструкции управления, на вторую скорость, меньшую, чем первая скорость; и выполнение управления парковкой для транспортного средства V в соответствии с измененной инструкцией управления.
[0016]
Устройство 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения представляет собой устройство типа дистанционного управления, которое принимает операционную команду извне и управляет движением транспортного средства V, чтобы парковать транспортное средство V в заданное парковочное место. Человек, занимающий место в транспортном средстве, может находиться вне салона транспортного средства или также внутри салона транспортного средства.
[0017]
Устройство 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения может быть автономного (автоматизированного) типа управления, в котором рулевое управление и ускорение/торможение выполняются автономным (автоматическим) образом. Устройство 100 управления парковкой также может быть полуавтономного (полуавтоматического) типа, в котором операция рулевого управления выполняется автономно, в то время как водитель выполняет операцию ускорения/торможения.
В программе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения пользователь может произвольно выбирать целевое парковочное место, или устройство 100 управления парковкой или сторона стоянки могут автоматически устанавливать целевое парковочное место.
[0018]
Устройство 10 управления устройства 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения имеет функции выполнения процесса обнаружения для относительной высоты/высоты между первым положением по высоте оператора M и второго положение по высоте транспортного средства V, процесс вычисления для маршрута парковки, процесс вычисления для инструкции управления, включающей в себя скорость, и процесс управления парковкой. Устройство 10 управления дополнительно имеет функции выполнения процесса обнаружения препятствий и вычисления маршрута парковки с учетом положения препятствия. Каждый из вышеупомянутых процессов выполняется посредством взаимодействия программного обеспечения для реализации процесса и вышеописанного аппаратного обеспечения.
[0019]
Некоторые процессы определения положения оператора M будут описаны со ссылкой на фиг. 2А в 2D. Устройство 10 управления получает положение оператора M. Положение оператора M включает в себя информацию о положении на плоскости движения транспортного средства V (двухмерную информацию о положении) и информацию о положении по высоте (трехмерную информацию о положении). Положение оператора M может быть обнаружено на основе сигналов датчиков от датчиков, предусмотренных в транспортном средстве V, или также может быть получено путем обнаружения положения операционного терминала 5, переносимого оператором M, и вычисления положения оператора M на основе положения операционного терминала 5. Операционный терминал 5 может быть предусмотрен в предварительно определенном положении или может также переноситься оператором M. Когда операционный терминал 5 предусмотрен в предварительно определенном положении, оператор M приходит в положение, в котором предусмотрен операционный терминал 5, и использует операционный терминал 5. В этих случаях положение операционного терминала 5 может использоваться как положение оператора M.
[0020]
Как показано на фиг. 2А, положение оператора M определяется на основе результатов обнаружения от множества дальномерных устройств 2, предусмотренных в транспортном средстве, и/или изображений, снятых камерами 1. Положение оператора M может быть обнаружено на основе изображений, снятых камерами 1a-1d. Каждое из дальномерных устройств 2 может представлять собой радиолокационное устройство, такое как радиолокационное устройство миллиметрового диапазона, лазерное радиолокационное устройство или ультразвуковое радиолокационное устройство или гидролокатор. Множество дальномерных устройств 2 и их результаты обнаружения могут быть идентифицированы, и таким образом двумерное положение и/или трехмерное положение оператора M могут быть обнаружены на основе результатов обнаружения. Дальномерные устройства 2 могут быть обеспечены в тех же положениях, что и камеры 1a-1d, или могут также быть обеспечены в других положениях. Устройство 10 управления также может обнаруживать жест оператора M на основе изображений, снятых камерами 1a-1d, и идентифицировать операционную команду, связанную с признаками изображения жеста.
[0021]
Как показано на фиг. 2B, положение операционного терминала 5 или оператора M, несущего операционный терминал 5, также может быть обнаружено на основе радиоволн связи между несколькими антеннами 211, предоставленными в разных положениях транспортного средства V и операционного терминала 5. Когда множество антенн 211 обмениваются данными с одним операционным терминалом 5, интенсивность принимаемой радиоволны каждой антенны 211 отличается. Положение операционного терминала 5 может быть вычислено на основе разности интенсивности между принятыми радиоволнами антенн 211. Двухмерное положение и/или трехмерное положение операционного терминала 5 или оператора M может быть вычислена из разности интенсивности между принятыми радиоволнами антенны 211.
Как показано на фиг. 2C, предварительно определенное положение (направление/расстояние: D1, D2) относительно сиденья водителя DS транспортного средства V могут быть предварительно обозначены как рабочее положение оператора M или как положение, в котором расположен операционный терминал 5. Например, когда оператор M временно останавливает транспортное средство V в назначенном положении и покидает транспортное средство V, чтобы задействовать операционный терминал 5, предусмотренный в предварительно определенном положении, можно обнаружить начальное положение оператора M относительно транспортное средство V или начальное положение терминала 5, которое перевозится оператором M, относительно транспортного средства V.
[0022]
Как показано на фиг. 2D аналогичным образом, информация об изображении, представляющая рабочее положение (положение, в котором оператор M стоит: рабочее положение) относительно транспортного средства V, отображается на дисплее 53 операционного терминала 5. Это управление отображением может выполняться приложением, установленным на стороне операционного терминала 5, или также может выполняться на основе команды от устройства 10 управления.
[0023]
Положение (включая положение по высоте) транспортного средства V может быть получено на основе значения обнаружения устройства обнаружения положения, предусмотренного в транспортном средстве V. Устройство обнаружения положения обнаруживает положение устройства приема радиоволн (транспортное средство V) или операционный терминал 5) на основе принятых радиоволн от спутников, таких как спутники глобальной системы определения местоположения (GPS). Аналогично, положение оператора M может быть получено на основе значения обнаружения устройства обнаружения положения, предусмотренного в операционном терминале 5.
[0024]
Информация о высоте оператора M и транспортного средства V может быть получена как относительная разность между высотами, то есть информация об относительной высоте/высоте. Относительная высота/высота может быть получена как «первое положение по высоте оператора M минус второе положение по высоте транспортного средства» или «второе положение по высоте транспортного средства минус первое положение по высоте оператора M.» Относительное положение оператора M относительно транспортного средства V может быть обнаружено на основе принятых радиоволн от ранее описанных дальномерных устройств 2, установленных в транспортном средстве V, и поэтому относительная высота/высота может быть вычислена из информации о высоте относительного положения. Дополнительно или альтернативно, относительное положение оператора M по отношению к транспортному средству V может быть обнаружено аналогичным образом на основе захваченных изображений оператора M с камер 1, оборудованных в транспортном средстве V, и относительная высоте/высота таким образом высоту можно вычислить на основе информации о высоте относительного положения. Дополнительно или альтернативно, относительное положение оператора M по отношению к транспортному средству V может быть обнаружено аналогичным образом на основе принятой радиоволны от операционного терминала 5, которая принимается в устройстве 51 связи, оборудованном в транспортном средстве. V, и относительная высота/высота, следовательно, может быть вычислена из информации о высоте относительного положения.
[0025]
Процесс обнаружения препятствия будет описан со ссылкой на фиг. 3А и 3В. «Препятствия» включают в себя конструкции, такие как стены и столбы парковочных сооружений, установки вокруг транспортного средства, пешеходы, другие транспортные средства и т.д.
Как показано на фиг. 3А, препятствие обнаруживается на основе результатов обнаружения от дальномерных устройств 2, предусмотренных в транспортном средстве V, и/или изображений, снятых камерами 1. Дальномерные устройства 2 обнаруживают присутствие или отсутствие объекта, положение объекта, размер объекта и расстояние до объекта на основе принятых сигналов радарных устройств. Дополнительно или альтернативно, наличие или отсутствие объекта, положение объекта, размер объекта и расстояние до объекта могут быть обнаружены на основе изображений, снятых камерами 1a-1d. Обнаружение препятствия может быть выполнено с использованием стереофонической техники движения с изображениями, снятыми камерами 1a-1d. Результаты обнаружения используются для определения того, является ли парковочное место пустым (независимо от того, припарковано или нет транспортное средство на парковочном месте).
Как показано на фиг. 3B, препятствия, включающие в себя конструкции, такие как стены и столбы парковки, могут быть обнаружены на основе информации 34 о парковке, полученной от запоминающего устройства 32 информационного сервера 3. Информация о парковке включает в себя местоположение и идентификационный номер каждой парковки, а также информацию о местоположении проходов, столбов, стен, мест для хранения и т.д. на парковке. Информационный сервер 3 может управляться персоналом парковки.
[0026]
Фиг. 4A-4C иллюстрируют примеры взаимного расположения между транспортным средством V и оператором M. Фиг. 4A иллюстрирует пример случая, в котором этажи, на которых присутствуют оператор M и транспортное средство V, отличаются на многоуровневой парковке. Фиг. 4B иллюстрирует пример случая, в котором существует ступень между этажами, на которой присутствуют оператор M и транспортное средство V, и ступень имеет разность высот, которую оператор M не может преодолеть. Фиг. 4C иллюстрирует пример случая, в котором оператор M находится на верхнем этаже (верхняя сторона) конструкции ST, такой как здание, и смотрит вниз на транспортное средство V, находящееся на нижнем этаже (нижняя сторона). В примерах, показанных на фиг. 4A-4C, положения по высоте транспортного средства V и оператора M различны. Относительная высота H может быть получена на основе информации о высоте относительного положения между транспортным средством V и оператором M. Оператор M во взаимных расположениях, показанных на этих фигурах, имеет относительную высоту предварительно определенного значения или более, и, следовательно, не может немедленно перейти к транспортному средству поблизости, чтобы подтвердить окружение транспортного средства.
[0027]
Фиг. 5A-5D иллюстрируют ситуации, в которых оператор M наблюдает за транспортным средством V, когда положения по высоте транспортного средства V и оператора M различаются. Со ссылкой на эти фигуры будут рассмотрены некоторые сцены, в которых оператор M, который выполняет дистанционное управление, управляет транспортным средством V, чтобы парковать транспортное средство V. На этих фигурах транспортное средство в качестве цели операции парковки представляет собой транспортное средство V1. Транспортное средство V1 и другие транспортные средства V2 и V3 расположены на парковочной поверхности PG1, образованной из сетчатого пластинчатого материала PG, имеющего множество сквозных отверстий/щелей/сеток. Транспортное средство V1 и операционный терминал 5 могут связываться друг с другом, потому что пластинчатый материал PG, который является структурой парковочной поверхности PG1, имеет множество сквозных отверстий/щелей/сеток. Примеры материала пластины PG для использования включают в себя металл, легкий металл и полимерный материал, такой как армированный пластик.
[0028]
Другие транспортные средства V2 и V3 уже припаркованы с обеих сторон места, в котором должно быть припарковано транспортное средство V1. На фигурах 5A-5D, относительная высота между транспортным средством V1 и точкой обзора оператора M, наблюдающего транспортное средство V1, различна. Фиг. 5A является схемой, иллюстрирующей транспортные средства V1-V3, наблюдаемые с точки зрения оператора M, который присутствует на том же этаже, что и парковочная поверхность PG1 для транспортного средства V1, как обычно.
Фиг. 5B является схемой, иллюстрирующей транспортные средства V1-V3, наблюдаемые с точки зрения оператора M, который присутствует в положении на этаже ниже, чем положение транспортного средства V1 на парковочной поверхности PG1, когда этажи, на которых находятся оператор M и транспортное средство V отличаются на парковке, имеющей многоуровневую структуру, например, как показано на фиг. 4A. Как показано на фиг. 5B, оператор M рассматривает задние поверхности (нижние поверхности) транспортных средств V1-V3 со стороны задней поверхности PG2 парковочной поверхности PG1. Парковочная поверхность PG1 является поверхностью (сетчатой поверхностью), имеющей большое количество сквозных отверстий/щелей/сеток, и поэтому оператор M может наблюдать за транспортными средствами V1-V3 через сквозные отверстия/щели/сетку.
Фиг. 5C - схема, иллюстрирующая транспортные средства V1-V3, наблюдаемые с точки зрения оператора M, когда существует ступень между этажами, на которых присутствуют оператор M и транспортное средство V, и ступень имеет разность высот, который оператор M не может преодолеть. В качестве примера эта фигура - схема , иллюстрирующую состояние, в котором, когда этажи парковки соединены склоном, оператор M, присутствующий на склоне между мезонином второго этажа и вторым этажом, просматривает транспортные средства V1-V1, припаркованные на втором этаже в качестве верхнего этажа.
Фиг. 5D - схема, иллюстрирующая транспортные средства V1-V3, наблюдаемые с точки зрения оператора M, когда оператор M присутствует на верхнем этаже здания ST и смотрит вниз на транспортное средство V, расположенное на нижнем этаже, как показано на фиг. 4C.
Таким образом, оператор M может находиться в положении ниже, чем транспортное средство V1 в качестве цели операции. Когда относительная высота велика, оператор M не может сразу приблизиться к транспортному средству, чтобы подтвердить окружение.
[0029]
Как показано на фиг. 5А, при просмотре транспортных средств с того же этажа, что и обычно, оператор M может подтвердить наличие транспортного средства V2, расположенного за транспортным средством V1. Однако, как показано на фиг. 5B, при просмотре транспортных средств из нижнего положения на нижнем этаже оператор M не может визуально распознать взаимное расположение между транспортным средством V1 и транспортным средством V2, расположенным за транспортным средством V1, поскольку часть транспортного средства V2 скрыта корпусом транспортного средства транспортного средства V1 с точки зрения оператора M. Когда транспортное средство V1 и оператор M расположены на одном этаже, оператор M может приблизиться к положению, в котором транспортное средство V1 и транспортное средство V2 находятся близко друг к другу и может тем самым визуально распознавать транспортные средства легко, но когда транспортное средство V1 и оператор M расположены на разных этажах, оператор M не может приблизиться к транспортному средству V1 и, следовательно, не может визуально распознать положение, которое оператор M желает визуально распознать. Как показано на фиг. 5C, также при просмотре транспортных средств с положения меньшей относительной высоты, чем в случае разницы этажей, такой как более низкое положение в нижней части склона, оператор M не может визуально распознавать транспортное средство V2, которое является считается присутствующим, поскольку транспортное средство V2 скрыто корпусом транспортного средства транспортного средства V1 с точки зрения оператора M. Кроме того, как показано на фиг. 5D, также когда оператор M, находящийся на верхнем этаже конструкции ST, такой как здание, наблюдает за транспортными средствами V, расположенными на нижней стороне и, таким образом, имеющими меньшую относительную высоту, существует часть транспортного средства V1, которую нельзя наблюдать. Как описано выше, когда транспортное средство V1 и оператор M расположены на одном этаже, оператор M может приблизиться к транспортному средству V1, чтобы визуально распознать транспортное средство V1, но когда оператор M находится на этаже с другой высотой, другим типом конструкции ST, оператор M не может приблизиться к транспортному средству V1 и, следовательно, не может визуально распознать положение, которое оператор M желает визуально распознать.
[0030]
Таким образом, когда относительная высота между первым положением по высоте оператора M и вторым положением по высоте транспортного средства V не меньше, чем первое предварительно определенное значение, и первое положение по высоте оператора M ниже (или выше), чем второе положение по высоте транспортного средства V, может быть сделано определение, что оператору M более сложно подтвердить окружение транспортного средства V, чем когда первое положение по высоте, по существу, равно второму положению по высоте. Дополнительно или альтернативно, когда относительная высота между первым положением по высоте оператора M и вторым положением по высоте транспортного средства V не меньше, чем первое предварительно определенное значение, может быть сделано определение, что оператор M не может визуально распознать положение, которое оператор M желает визуально распознать, потому что оператор M не может приблизиться к транспортному средству V1. В вышеописанных случаях первое положением по высоте оператора M ниже, чем второе положением по высоте транспортного средства V на парковке, имеющей многоуровневую конструкцию, но также и в случае, когда первое положением по высоте оператор M выше второго положения по высоте транспортного средства V, когда относительная высота между первым положением по высоте оператора M и вторым положением по высоте транспортного средства V не меньше, чем первое предварительно определенное значение, может быть выполнено определение что оператор M не может визуально распознать положение, которое оператор M желает визуально распознать, потому что оператор M не может приблизиться к транспортному средству V1. Например, как показано на фиг. 4C, можно рассмотреть случай, в котором оператор M находится на втором этаже здания, а транспортное средство V находится на парковочном месте перед первым этажом здания. Вышеприведенное описание основано на примере склона парковки, имеющей многоуровневую структуру, но определение также может быть выполнено на склоне общей дороги аналогичным образом.
В одном или нескольких вариантах осуществления настоящего изобретения, когда разность между первым положением по высоте и вторым положением по высоте не меньше, чем первое предварительно определенное значение, делается определение, что трудно подтвердить окружение или невозможно немедленно приблизиться к транспортному средству V, и скорость в инструкции управления в процессе парковки для транспортного средства V изменяется на более низкое значение (скорость). Ограничивая диапазон относительной высоты между оператором M и транспортным средством V, можно соответствующим образом выделить состояние (сцену), в котором трудно подтвердить окружение транспортного средства. В результате, когда оператору M трудно подтвердить окружение транспортного средства, скорость в инструкции управления может быть изменена на более низкое значение, что позволяет оператору M легко составить инструкцию.
[0031]
Когда разность между первым положением по высоте и вторым положением по высоте невелика, легкость подтверждения окружения транспортного средства не сильно отличается. В одном или нескольких вариантах осуществления настоящего изобретения первое предварительно определенное значение определяется как разность между первым положением по высоте и вторым положением по высоте, при котором оператору M представляется трудным подтвердить окружение транспортного средства. Когда разность между первым положением по высоте и вторым положением по высоте не меньше, чем первое предварительно определенное значение, делается определение, что оператору M трудно подтвердить окружение транспортного средства.
[0032]
«Первое предварительно определенное значение» в одном или нескольких вариантах осуществления настоящего изобретения может быть надлежащим образом определено в соответствии со структурой парковки, областью, в которой может работать оператор M, и т.п. Например, первое предварительно определенное значение может быть установлено равным 2 м. Когда относительная высота составляет 2 м или более, оператор не может легко приблизиться к транспортному средству V и, следовательно, не может быстро визуально распознать положение, которое оператор желает визуально распознать. Первое предварительно определенное значение является фактором, на который также влияют высота транспортного средства V, высота оператора M и острота зрения оператора M, но согласно экспериментам было обнаружено, что оператор M чувствует, что «трудно подтвердить окружение транспортного средства» и/или «трудно управлять транспортным средством», когда первое предварительно определенное значение составляет 2 м, то есть, когда разность между первым положением по высоте и второй высотой превышает 2 м В экспериментах, когда операторы M (тестировщики) работали на парковочной поверхности более низкого этажа, чем парковочная поверхность PG1 на высоте 2 м, и на склоне (тротуаре), соединенном с нижним этажом, все операторы M, которые работали в положениях с разностью высот более 2 м отвечали, что «было трудно подтвердить окружение транспортного средства» и «было трудно управлять транспортным средством». Также, когда операторы M (тестировщики) работали на парковочной поверхности выше, чем парковочная поверхность PG1 на высоту 2 м, на склоне (тротуаре), соединенном с верхним этажом, и на конструкции ST, все операторы M, которые работали в положениях с разностью высот более 2 м ответили, что «было трудно подтвердить окружение транспортного средства» и «было трудно управлять транспортным средством».
[0033]
В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, когда первое положение по высоте оператора M равно или больше, чем второе положение по высоте транспортного средства V на первое предварительно определенное значение, первая скорость которая предварительно установлена в инструкции управления, изменяется на вторую скорость, меньшую, чем первая скорость. Таким образом, устройство 10 управления выполнено с возможностью повторного вычисления инструкции управления, в которой скорость движения транспортного средства V уменьшается, поскольку ситуация, в которой оператор M наблюдает за окружением транспортного средства V, из положения ниже, чем транспортное средство V, может быть определяется как ситуация, которую оператору M трудно подтвердить. Посредством уменьшения скорости в инструкции управления увеличивается запас по времени для операции перемещения транспортного средства V, и операция перемещения может быть упрощена. Посредством этой операции, даже когда оператор M работает из положения, имеющего относительную разность высот по отношению к транспортному средству V1, может быть обеспечена работоспособность для оператора M для дистанционного управления транспортным средством V, и простота подтверждения ситуации вокруг транспортного средства также может быть обеспечена.
[0034]
Когда расстояние между оператором M и транспортным средством V велико, оператору M может быть трудно визуально распознать транспортное средство V. Поэтому, когда расстояние между оператором M и транспортным средством V не меньше, чем предварительно определенное расстояние, устройство 10 управления определяет, что оператор M находится в состоянии, в котором трудно подтвердить транспортное средство V, и выполняет процесс изменения первой скорости на вторую скорость. Здесь расстояние между оператором M и транспортным средством V относится к кратчайшему расстоянию между оператором M и транспортным средством V. Для удобства может использоваться горизонтальное расстояние между оператором M и транспортным средством V. Ограничивая диапазон расстояния между оператором M и транспортным средством V, можно соответствующим образом выделить состояние, в котором трудно подтвердить окружение транспортного средства. В результате, когда оператор M находится в состоянии затруднительного подтверждения окружения транспортного средства, скорость в инструкции управления может быть изменена на более низкое значение, что позволяет оператору M легко управлять транспортным средством V.
[0035]
В одном или нескольких вариантах осуществления настоящего изобретения устройство 10 управления учитывает препятствие, расположенное вокруг транспортного средства. Устройство 10 управления обнаруживает препятствие, присутствующее вокруг транспортного средства V. Когда между оператором M и транспортным средством V обнаруживается препятствие, устройство 10 управления определяет, что из-за препятствия может возникнуть слепая зона. Когда препятствие обнаружено, делается определение, что оператор M находится в состоянии, когда трудно подтвердить транспортное средство V, и выполняется процесс изменения первой скорости на вторую скорость. Случай, в котором существует препятствие между оператором M и транспортным средством V, может быть извлечен как сцена, в которой трудно подтвердить ситуацию вокруг транспортного средства. В результате, когда оператору M трудно подтвердить ситуацию вокруг транспортного средства, скорость в инструкции управления может быть изменена на более низкое значение, тем самым улучшая работоспособность транспортного средства V1 в процессе парковки.
[0036]
Процедура управления для управления парковкой будет описана ниже со ссылкой на блок-схему последовательности операций, показанную на фиг. 6 .
Фиг. На фиг.6 показана блок-схема последовательности операций, иллюстрирующая процедуру управления процессом управления парковкой, выполняемым системой 1000 управления парковкой, в соответствии с одним или несколькими вариантами осуществления настоящего изобретения. Триггер для запуска процесса управления парковкой конкретно не ограничен, и процесс управления парковкой может быть инициирован с помощью переключателя запуска устройства 100 управления парковкой.
[0037]
Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения имеет функцию автономного перемещения транспортного средства V в парковочное место на основе операционной команды, полученной извне транспортного средства.
[0038]
На этапе 101 устройство 10 управления устройством 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения получает информацию вокруг транспортного средства. Получение сигналов о расстояниях и получение захваченных изображений может выполняться выборочно. Устройство 10 управления получает сигналы о расстояниях от дальномерных устройств 2, которые прикреплены в нескольких местах транспортного средства V. Устройство 10 управления получает изображения, которые снимаются камерами 1a-1d, прикрепленными в нескольких местах транспортного средства V. Хотя это конкретно не ограничено, камера 1a расположена на передней решетке транспортного средства V, камера 1d расположена вблизи заднего бампера, а камеры 1b и 1c расположены на нижних частях правого и левого дверных зеркал. Камера, имеющая широкоугольный объектив с широким углом обзора, может использоваться в качестве каждой из камер 1a-1d. Камеры 1a-1d снимают изображения граничных линий парковочных мест вокруг транспортного средства V и объектов, присутствующих вокруг парковочных мест. Камеры 1a - 1d могут быть камерами CCD, инфракрасными камерами или другими соответствующими устройствами формирования изображения.
[0039]
На этапе 102 устройство 10 управления обнаруживает парковочные места, на которых возможна парковка. Устройство 10 управления обнаруживает рамки (области) парковочных мест на основе изображений, снятых камерами 1a-1d. Устройство 10 управления обнаруживает пустые парковочные места, используя данные обнаружения от дальномерных устройств 2 и данные обнаружения, извлеченные из захваченных изображений. Устройство 10 управления обнаруживает доступные парковочные места среди парковочных мест. Доступные парковочные места - это парковочные места, которые пусты (т. е. другие транспортные средства не припаркованы) и для которых можно вычислить маршруты для завершения парковки.
В одном или нескольких вариантах осуществления настоящего изобретения условие, что маршрут парковки может быть вычислен, означает, что траектория маршрута от текущего положения до целевого парковочного места может быть воспроизведена по координатам дорожного покрытия, не без пересечений с препятствиями (включая припаркованные транспортные средства).
[0040]
На этапе 103 устройство 10 управления передает доступные парковочные места на операционный терминал 5, управляет дисплеем 53 для отображения доступных парковочных мест и просит оператора M ввести информацию о выборе целевого парковочного места для парковки транспортного средства V. Целевое парковочное место может быть автоматически выбрано устройством 10 управления или стороной парковки. Когда операционная команда указания парковочного места вводится в операционный терминал 5, парковочное место устанавливается в качестве целевого парковочного места.
[0041]
В одном или нескольких вариантах осуществления настоящего изобретения на этапе 104 люди, занимающее место в транспортном средстве, вынуждены выходить из транспортного средства. После этого транспортное средство V перемещается в целевое парковочное место с помощью пульта дистанционного управления. Целевое парковочное место может быть выбрано после того, как люди, занимающее место в транспортном средстве, выйдут из транспортного средства.
[0042]
На этапе 105 устройство 10 управления получает относительную высоту между оператором M и транспортным средством V. Относительная высота представляет собой разность между первым положением по высоте оператора M и вторым положением по высоте транспортного средства V. Устройство управления 10 использует ранее описанную схему для определения положения оператора M. Положение оператора M включает в себя первое положение по высоте в направлении высоты. На этапе 106 устройство 10 управления получает второе положение по высоте транспортного средства V в направлении высоты. Устройство 10 управления может получать разность между первым положением по высоте оператора M и вторым положением по высоте транспортного средства V (первое положение по высоте минус второе положение по высоте) и использовать эту разность в качестве относительной высоты. Устройство 10 управления может получать в качестве относительной высоты первое положением по высоте (высоту относительно транспортного средства V) оператора M, которое вычисляется на основе результатов обнаружения от дальномерных устройств 2 или первого положения по высоте (высота относительно транспортного средства V) оператора M, которая вычисляется на основе изображений, снятых бортовыми камерами 1.
[0043]
На этапе 106 устройство 10 управления использует ранее описанную схему для обнаружения положения, в котором присутствует препятствие.
[0044]
На этапе 107 устройство 10 управления вычисляет маршрут парковки от положения остановки транспортного средства V до целевого парковочного места. Маршрут парковки включает в себя точку поворота для парковки, необходимую для перемещения на парковочное место. Для этой операции маршрут парковки определяется как линия, а также определяется как полосообразная зона, соответствующая занятой зоне транспортного средства V, на основе ширины транспортного средства. Занятая область транспортным средством V определяется с учетом ширины транспортного средства и ширины запаса, обеспечиваемого для движения.
[0045]
На этапе 108 устройство 10 управления вычисляет инструкцию управления для транспортного средства V для движения по маршруту парковки. Примеры инструкции управления включают в себя инструкции по работе для одного или нескольких из величины рулевого управления, скорости рулевого управления, ускорения рулевого управления, передачи (коробки переключения передач), скорости (движения), ускорения и замедления транспортного средства V. Инструкция управления включает в себя время или положение, в котором выполнялась вышеуказанная операция Инструкция для транспортного средства V выполнена. Когда инструкция управления выполняется, транспортное средство V следует по маршруту парковки, чтобы двигаться к целевому парковочному месту. Устройство 10 управления в соответствии с одним или несколькими вариантами осуществления настоящего изобретения представляет собой так называемое устройство управления парковкой типа дистанционного управления, которое выполняет инструкцию управления для перемещения транспортного средства V по вычисленному маршруту парковки на основе операционной команды, полученной от оператора M, расположенного вне транспортного средства V.
[0046]
Устройство 10 управления в соответствии с одним или несколькими вариантами осуществления настоящего изобретения устанавливает скорость, включенную в инструкцию управления, в соответствии с относительной высотой, которая является разностью между первым положением по высоте оператора M и вторым положением по высоте транспортного средства V. В частности, когда определено, что разность между первым положением по высоте оператора M и вторым положением по высоте транспортного средства V не меньше, чем первое предварительно определенное значение на основе относительной высоты, устройство 10 управления изменяет первую скорость, которая предварительно установлена в инструкции управления, на вторую скорость, меньшую чем первая скорость. Таким образом, устройство 10 управления повторно вычисляет инструкцию управления, в которой скорость движения транспортного средства V уменьшается, потому что ситуация, в которой оператор M смотрит на транспортное средство V из положения ниже, чем транспортное средство V, может быть определена как ситуация, в которой оператору M трудно подтвердить положение и движение транспортного средства V1. Посредством уменьшения скорости в инструкции управления скорость, с которой транспортное средство V движется по маршруту парковки, уменьшается. Это может улучшить работоспособность оператора M для управления транспортным средством в ситуации, когда оператору M трудно подтвердить транспортное средство V.
[0047]
Схема установки второй скорости особо не ограничена. Вторая скорость может быть вычислена путем вычитания предварительно определенного значения (положительного значения) из первой скорости или также может быть вычислена путем умножения первой скорости на предварительно определенное значение (0 <K<1). Дополнительно или в качестве альтернативы, отношение между относительной высотой HT первого положения по высоте относительно второго положения по высоте и второй скоростью MV может быть предварительно задано.
[0048]
Фиг. 7А - схема, иллюстрирующая пример взаимосвязи между относительной высотой HT и второй скоростью MV. Положение оператора M становится относительно более низким, поскольку относительная высота HT изменяется вправо вдоль ее оси (изменяется при отдалении от точки отсчета). Согласно взаимосвязи, проиллюстрированной на фигуре, когда относительная высота представляет собой первый порог TH1 ( <TH2) или больше и меньше второго порога TH2, скорость транспортного средства устанавливается равной MV1, и когда скорость транспортного средства равна второму порогу TH2 или больше и меньше третьего порога TH3, вторая скорость MV уменьшается по мере увеличения относительной высоты HT.
[0049]
Хотя это конкретно не ограничено, первый порог TH1 может быть установлен равным, например, 1 м. Считается, что оператор может без затруднений подтвердить движение транспортного средства V1 при разности высот около 1 м на склоне или тому подобном. Второй порог TH2 может быть установлен, например, примерно на 2 метра. Сцена с большой разностью высот может быть извлечена на многоуровневой парковке или тому подобном, исключая склон с умеренной разностью высот или тому подобное. Третий порог TH3 может быть установлен равным, например, 4 м. На многоуровневой парковке оператору M, расположенному на первом этаже, трудно управлять транспортным средством V1, расположенным на мезонине второго этажа или третьего этажа. Когда относительная высота не меньше, чем третий порог TH3, транспортное средство V1 управляется для остановки.
[0050]
Когда разность между первым положением по высоте и вторым положением по высоте не меньше, чем третий порог TH3 (> TH2), транспортное средство V1 управляется для остановки (скорость=ноль). Таким образом, транспортное средство V1 управляется так, чтобы сделать остановку, когда разность между первым положением по высоте и вторым положением по высоте не меньше, чем третий порог TH3 (> TH2) выше, чем второй порог TH2, при котором начинается управление снижением скорости транспортного средства. Процесс остановки может быть временным. Оператор M может управлять транспортным средством V1 с достаточным временем.
[0051]
Когда разность между первым положением по высоте и вторым положением по высоте не меньше, чем третий порог TH3 (> TH2), выполнение инструкции управления парковкой транспортного средства V1 приостанавливается или отменяется. Таким образом, выполнение инструкции управления для транспортного средства V1 приостанавливается или отменяется, когда разность между первым положением по высоте и вторым положением по высоте не меньше, чем третий порог TH3 (> TH2) выше, чем второй порог TH2, при котором начинается управление снижением скорости транспортного средства; следовательно, оператор M может перемещаться в положение, которое позволяет уменьшить разность высот, или может выполнять операцию ввода при рассмотрении следующей инструкции с запасом по времени.
[0052]
Устройство 10 управления в соответствии с одним или несколькими вариантами осуществления настоящего изобретения устанавливает более низкую вторую скорость, когда расстояние между оператором M и транспортным средством V увеличивается. Когда расстояние от оператора M увеличивается, становится все труднее воспринимать движение транспортного средства V. Устройство 10 управления управляет движением транспортного средства V на более низкой скорости, когда расстояние от оператора M увеличивается, так что положение транспортного средства V и приближение к препятствию можно легко контролировать. В результате работоспособность для оператора M может поддерживаться или улучшаться, даже когда транспортное средство V находится в положении, удаленном от оператора M.
[0053]
Фиг. 7B - схема, иллюстрирующая пример взаимосвязи между расстоянием D между оператором M и транспортным средством V и ограничивающим коэффициентом K для скорости MV. Расстояние D между оператором M и транспортным средством V является линейным расстоянием. Расстояние между оператором M и транспортным средством V увеличивается по мере того, как расстояние D изменяется вправо вдоль его оси (изменяется при отдалении от точки отсчета). Ограничивающий коэффициент К является коэффициентом (0 <K<1) который умножается на вторую скорость, применяемую, когда относительное расстояние не ниже первого предварительно определенного значения (соответствует второму порогу на фиг. 7A). Устройство 10 управления в соответствии с одним или несколькими вариантами осуществления настоящего изобретения устанавливает ограничивающий коэффициент K на меньшее значение (0 <K<1) по мере того, как расстояние между оператором M и транспортным средством V увеличивается (так как оператор M находится дальше от транспортного средства V), и вычисляет более низкую вторую скорость, умноженную на ограничивающий коэффициент K. Как показано на фигуре, когда расстояние между оператором M и транспортным средством V не превышает первый порог THd расстояния, ограничивающий коэффициент K устанавливается равным 1,0, а вторая скорость не корректируется, но когда расстояние между оператором M и транспортным средством V превышает первый порог THd расстояния, ограничивающий коэффициент K уменьшается в соответствии с расстоянием D. Как показано на фигуре, минимальное значение (например, 0,5) может быть установлено для ограничивающего коэффициента K.
[0054]
Ограничивающий коэффициент K для второй скорости не ограничивается вышеописанными примерами и может быть связан с фактором окружающей среды при парковке вокруг транспортного средства. Примеры факторов окружающей среды при парковке в этом процессе включают в себя условия, касающиеся поля зрения, такие как наличие или отсутствие препятствия, размер препятствия, размер визуально распознаваемой области, размер области слепой зоны и соотношение размера визуально распознаваемой области и размера области слепой зоны, окружения обнаружения, такого как погода (ливень, снегопад) или освещенность, и состояния дорожного покрытия. Вертикальная ось, показанная на фиг. 7А может быть любым из таких факторов окружающей среды при парковке.
[0055]
Условие, касающееся поля зрения, получают путем вычисления диапазона, который можно визуально распознать с положения оператора M, используя изображения, снятые камерами 1. В состоянии, касающемся поля зрения, правое направление на горизонтальной оси является направлением, в котором поле зрения ухудшается. Чем хуже поле зрения, тем ниже установлен ограничивающий коэффициент K. Например, поскольку площадь области слепой зоны больше, ограничивающий коэффициент K является меньшим значением, а вторая скорость транспортного средства V устанавливается на более низкое значение. Условие, касающееся окружения обнаружения, может быть получено на основе включения/выключения функции стеклоочистителя, скорости движения функции стеклоочистителя, новостей о погоде, полученных извне, захваченных изображений, значений освещенности и/или календаря и времени (определения до или после захода солнца). В условиях, касающихся окружения обнаружения, правое направление на горизонтальной оси является направлением, в котором точность обнаружения ухудшается. Например, чем хуже погода или чем ниже освещенность, тем ниже установлен ограничивающий коэффициент K. Например, ограничивающий коэффициент K устанавливается на меньшее значение (0 <K<1) по мере того, как скорость движения стеклоочистителя увеличивается (количество осадков увеличивается) или обнаруженная освещенность становится ниже, а вторая скорость, умноженная на ограничивающий коэффициент K, устанавливается на более низкое значение. Условие, касающееся состояния дорожного покрытия, может быть получено на основе коэффициента скольжения колеса и/или погоды. Поверхность дороги скользкая во время дождя, и поэтому состояние дорожного покрытия можно оценить по состоянию дождя путем получения времени дождя или количества осадков на основе включения/выключения функции стеклоочистителя, скорости движения функция стеклоочистителя, новости погоды, полученные извне, и/или захваченные изображения. В состоянии, касающемся состояния дорожного покрытия, правое направление на горизонтальной оси является направлением, в котором транспортное средство находится в более скользком состоянии. Например, ограничивающий коэффициент K устанавливается на более низкое значение (0 <K<1)при определении того, что поверхность дороги более скользкая. Например, ограничивающий коэффициент K устанавливается на меньшее значение (0 <K<1) по мере того, как увеличивается коэффициент скольжения колеса, скорость движения стеклоочистителя увеличивается (количество осадков увеличивается), состояние снегопада увеличивается или обнаруженная освещенность становится ниже, а вторая скорость транспортного средства V устанавливается на более низкое значение. Коэффициент проскальзывания колеса получен из блока управления ABS.
[0056]
Дополнительно или альтернативно, операция ввода может быть ограничена в соответствии с разностью между первым положением по высоте и вторым положением по высоте. Устройство 10 управления в соответствии с одним или несколькими вариантами осуществления настоящего изобретения заставляет операционный терминал 5 запрещать прием операционной команды, когда первое положение по высоте ниже, чем второе положение по высоте, и разность между первым положением по высоте и вторым положением по высоте не меньше, чем третий порог TH3 (> TH2). Таким образом, операция ввода для операционной команды на операционный терминал 5 запрещается, когда разность между первым положением по высоте и вторым положением по высоте не меньше, чем третий порог TH3 (> TH2) выше, чем второй порог TH2, при котором начинается управление снижением скорости транспортного средства, и поэтому оператор M может быть информирован о том, что операция ввода невозможна. Сообщая, что ввод операции не может быть выполнен, оператор M может перейти в положение, в котором разность высот невелика. В ситуации, когда разность высот велика, точность операции, выполняемой оператором M, не может быть обеспечена. За счет неполучения ввода операции можно предотвратить движение транспортного средства V1 на основе неверной входной информации. Неполучение ввода операции включает в себя процесс игнорирования введенной информации, процесс представления информации, указывающей, что ввод операции не принят, и процесс представления информации, указывающей, что управление парковкой невозможно.
[0057]
Дополнительно или в качестве альтернативы, ввод операции не может быть получен из-за того, что операционный терминал 5 запрещает представление информации для приема операционной команды. Примеры процесса запрета представления информации для приема операционной команды включают в себя процесс не отображения экрана операции, процесс отображения переключателя ввода серым цветом и процесс отображения сообщения наложенным образом на экран операции. Это позволяет оператору M не выполнять бесполезную операцию ввода, которую нельзя получить. Кроме того, когда экран операции не представлен, оператор M может тем самым распознать, что управление парковкой неисполнимо.
[0058]
Фиг. 8A-8C иллюстрируют примеры экрана операции, отображаемого на дисплее 53 операционного терминала 5. Фиг. 8А иллюстрирует пример экрана операции для приема операционной команды. Эта фигура иллюстрирует пример экрана операции, отображаемого, когда разность между первым положением по высоте и вторым положением по высоте меньше, чем третий порог (первое предварительно определенное значение, при котором начинается управление замедлением). Другими словами, это пример экрана операции, отображаемого, когда относительная высота меньше, чем первое предварительно определенное значение, и оператор M и транспортное средство V расположены на одной высоте. Как показано на фигуре, отображается кнопка «Вперед», которая служит в качестве выключателя автоблокировки для инструктирования выполнения управления парковкой. Выключатель автоблокировки, относится к переключателю, имеющему функцию продолжения выполнения процесса управления парковкой, только когда оператор прикладывает усилие к переключателю, и функцию приостановки или отмены выполнения процесса управления парковкой, когда сила, приложенная к переключателю, является устранена. Пока нажат выключатель автоблокировки операционного терминала 5, процесс управления парковкой выполняется непрерывно.
[0059]
Фиг. 8B иллюстрирует пример экрана операции, отображаемого, когда существует относительная разность высот между оператором M и транспортным средством V, и разность между первым положением по высоте и вторым положением по высоте не меньше, чем третий порог (первое предварительно определенное значение). Как показано на фигуре, отображение кнопки «Вперед» для указания выполнения управления парковкой отображается серым цветом. Серая кнопка «Вперед» не принимает операцию ввода.
[0060]
Аналогично, фиг. 8C иллюстрирует другой пример экрана операции, отображаемого, когда существует относительная разность высот между оператором M и транспортным средством V, и разность между первым положением по высоте и вторым положением по высоте не меньше, чем третий порог (первое предварительно определенное значение). Как показано на фигуре, сообщение отображается наложенным образом на кнопке «Вперед» для указания выполнения управления парковкой. В этом примере кнопка «Вперед» для указания выполнения управления парковкой скрыта сообщением «Пожалуйста, подойдите к транспортному средству. Управление парковкой начнется при приближении к транспортному средству». Кнопка «Вперед», скрытая отображением текста, не получает операцию ввода, выполненную оператором M. Когда разность между первым положением по высоте и второго положение по высоте не меньше, чем второй порог (первое предварительно определенное значение), или третий порог (первое предварительно определенное значение), функция вибрации операционного терминала 5 может быть активирована, чтобы вибрировать вибрирующим элементом операционного терминала 5. Вибрируя операционным терминалом 5, можно снизить работоспособность операции ввода, выполняемой оператором M, и уведомить оператора M о том, что ввод не получен.
[0061]
Фиг. 9 иллюстрирует подпрограмму этапа 108. На этапе 120 устройство 10 управления определяет, является или нет относительная высота между первым положением по высоте оператора M и второго положение по высоте транспортного средства V первым предварительно определенным значением или более. Когда относительная высота является первым предварительно определенным значением или меньше, может быть определена ситуация, в которой окружение транспортного средства V может быть легко подтверждено. В этом случае процесс переходит к этапу 125, на котором первая скорость, предварительно установленная как заданное значение, применяется к инструкции управления без изменения.
[0062]
С другой стороны, когда значение относительной высоты между первым положением по высоте и вторым положением по высоте является первым предварительно определенным значением или более, делается определение, что оператор M находится в ситуации, в которой трудно подтвердить окружение транспортного средства V, и процесс переходит к этапу 121. На этапе 120 устройство 10 управления может оценить расстояние между оператором M и транспортным средством V и установить дополнительное условие, чтобы расстояние между оператором M и транспортным средством V было предварительно определенным расстоянием или более. Скорость может быть изменена с учетом не только относительной высоты, но и состояния разделения между горизонтальными положениями. На этапе 120 устройство 10 управления может подтвердить наличие или отсутствие препятствия между оператором M и транспортным средством V и установить дополнительное условие, что препятствие существует между оператором M и транспортным средством V. Скорость может быть изменена с учетом не только относительной высоты, но и наличия или отсутствия препятствий.
[0063]
На этапе 121 устройство 10 управления вычисляет вторую скорость в соответствии с относительной высотой (разностью высот). Относительная высота, упомянутая в данном документе, основана на предположении, что оператор M находится в более низком положении, чем транспортное средство V. Вторая скорость вычисляется со ссылкой на соотношение соответствия между относительной высотой HT и второй скоростью MV, показанное как пример на фиг. 7А.
[0064]
На этапе 122 устройство 10 управления вычисляет вторую скорость, используя ограничивающий коэффициент K в соответствии со степенью фактора окружающей среды при парковке. Вторая скорость вычисляется со ссылкой на соотношение соответствия между расстоянием между оператором M и транспортным средством V и ограничивающий коэффициент K, проиллюстрированным в качестве примера на фиг. 7В. Расстояние между оператором M и транспортным средством V является одним из факторов окружающей среды при парковке.
[0065]
На этапе 123 устройство 10 управлениязаставляет операционный терминал 5 запретить ввод операционной команды. Этап 123 выполняется параллельно с этапом 121, 122 или до или после этапа 121, 122. Устройство 10 управления предписывает операционному терминалу 5 запретить представление информации для приема операционной команды или отключает функцию переключения для приема операционной команды. Это ограничивает ввод операционной команды операционным терминалом 5.
[0066]
На этапе 124 устройство 10 управления использует вычисленную вторую скорость для управления парковкой. Первая скорость, первоначально установленная в управлении парковкой, изменяется на вторую скорость. Дополнительно или альтернативно, когда относительная высота не меньше, чем первое предварительно определенное значение, устройство 10 управления может устанавливать вторую скорость равной нулю, чтобы остановить транспортное средство.
[0067]
Обращаясь снова к фиг. 6, на этапе S108 устройство 10 управления формирует инструкцию управления для перемещения транспортного средства V по вычисленному маршруту парковки. Устройство 10 управления предварительно сохраняет информацию о спецификации транспортного средства V, необходимую для инструкции управления. Примеры инструкций управления включают в себя операционные инструкции для целевой скорости (включая ноль), замедления, величины рулевого управления, скорости рулевого управления, ускорения рулевого управления и передачи (коробки переключения передач) транспортного средства V, которые связаны с моментом или положением, когда транспортное средство V движется вдоль маршрута парковки и др. операционные инструкции. Целевая скорость включает в себя верхнюю предельную скорость. Целевое ускорение и замедление включают в себя верхнее предельное ускорение и верхнее предельное замедление. Целевая величина рулевого управления, скорость рулевого управления и ускорение рулевого управления включают в себя соответствующие верхние предельные значения. Инструкция относительно маршрута парковки и операционная инструкция, связанная с маршрутом парковки, выполняются транспортным средством V, и транспортное средство V, таким образом, может перемещаться (парковаться) к целевому парковочному месту.
[0068]
Фиг. 10 является схемой, иллюстрирующей пример инструкции управления. Фиг. 10 иллюстрирует пример инструкции управления, в которой целевая скорость TV связана с положением RT на маршруте парковки. Задана целевая скорость TV, когда транспортное средство V движется в каждой точке маршрута парковки. Целевая скорость равна нулю в каждой начальной точке PS процесса управления парковкой, точке поворота для парковки PT и конечной точке PE процесса управления парковкой на маршруте парковки. В инструкции управления, показанной на фиг. На фиг.6 сплошная линия CR1 представляет инструкцию управления, к которой применяется первая верхняя предельная скорость MV1 (> вторая верхняя предельная скорость MV2) из предварительно установленных первых скоростей. Пунктирная линия CR2 представляет инструкцию управления, к которой применяется вторая верхняя предельная скорость MV2 (< первой верхнее предельной скорости MV1) из вычисленных вторых скоростей. Первая верхняя предельная скорость и вторая верхняя предельная скорость являются аспектом целевой скорости. Как показано на фигуре, целевая скорость TV в инструкции управления, обозначенной пунктирной линией CR2, ниже, чем целевая скорость TV в инструкции управления, указанной сплошной линией CR1. Здесь вторая верхняя предельная скорость представляет собой верхнюю скорость, которая применяется, когда делается определение, что относительная высота между первым положением по высоте оператора M и вторым положением по высоте транспортного средства V не меньше первого предварительно определенного значения (|Второе положение по высоте - Первое положение по высоте| > Первое предварительно определенное значение).
[0069]
Процесс этапа 109 и последующие процессы будут описаны. Устройство 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения выполняет процесс управления парковкой посредством дистанционного управления, который включает в себя передачу команды установки целевого парковочного места, команды запуска процесса управления парковкой, команды приостановки/отмены парковки и других необходимых команд снаружи транспортному средству V1 для выполнения парковки не садясь в транспортное средство V. На этапе 109 устройство 10 управления управляет дисплеем 53 операционного терминала 5, чтобы представить маршрут парковки. Когда оператор M подтверждает маршрут парковки и инструкция выполнения вводится на этапе 110, процесс переходит к этапу 111. Операционный терминал 5 передает инструкцию выполнения от оператора M к устройству 100 управления парковкой транспортного средства V. Устройство 100 управления парковкой транспортного средства V начинает управление парковкой.
[0070]
На этапе 113 устройство 10 управления периодически вычисляет относительную высоту (разность между первым положением по высоте и вторым положением по высоте. Относительная высота изменяется из-за движения транспортного средства V или движения оператора M, и легкость для оператора M в подтверждении транспортного средства V изменяется соответственно. Устройство 10 управления вычисляет относительную высоту в предварительно определенном цикле, чтобы реагировать на изменение ситуации. На этапе 114 устройство 10 управления определяет, есть ли изменение относительной высоты. Когда есть изменение в относительной высоте, инструкция управления вычисляется снова, потому что также есть изменения в легкости, для оператора M, подтверждения транспортного средства V и маршрута парковки и легкости удаленной операции. Когда новая соответствующая инструкция управления может быть вычислена, используется новый маршрут парковки. На этапе 115 устройство 10 управления обновляет инструкцию управления, вычисленную на этапе 108. Когда на этапе 114 нет изменения относительной высоты, нет необходимости вычислять новую инструкцию управления, поэтому процесс переходит к этапу 116.
[0071]
На этапе 116 устройство 10 управления отслеживает изменение относительной высоты до тех пор, пока транспортное средство V не достигнет точки поворота для парковки. Когда транспортное средство V достигает точки поворота для парковки, переключение передач, включенное в инструкцию управления, выполняется на этапе 117. После этапа 117 следует этап 118, на котором управление парковкой завершается путем последовательного выполнения инструкций управления.
[0072]
Устройство 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения управляет работой системы 40 привода через контроллер 70 транспортного средства в соответствии с инструкцией управления, так что транспортное средство V движется по маршруту парковки. Устройство 100 управления парковкой вычисляет командные сигналы для системы 40 привода транспортного средства V, такого как двигатель EPS, одновременно возвращая выходное значение датчика 50 угла поворота рулевого управления устройства рулевого управления, так что траектория движения транспортного средства V совпадает с вычисленным маршрутом парковки и передает командные сигналы в систему 40 привода или в контроллер 70 транспортного средства, который управляет системой 40 привода.
[0073]
Устройство 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения включает в себя блок управления для управления парковкой. Блок управления для управления парковкой получает информацию о диапазоне переключения передач от блока управления AT/CVT, информацию о скорости вращения колес от блока управления ABS, информацию о угле поворота рулевого управления от блока управления углом поворота рулевого управления, информацию о скорости вращения двигателя от ECM и другую необходимую информацию. На основе этих элементов информации блок управления для управления парковкой вычисляет и выводит информацию об инструкциях по автономному рулевому управлению на блок управления EPS, информацию об инструкциях, такую как предупреждение блоку управления счетчиком, и. Устройство 10 управления получает элементы информации, которые получают датчиком 50 угла поворота рулевого управления устройства рулевого управления транспортного средства V, датчиком 60 скорости транспортного средства и другими датчиками транспортного средства V через контроллер 70 транспортного средства.
[0074]
Система 40 привода в соответствии с одним или несколькими вариантами осуществления настоящего изобретения приводит в движение транспортное средство V для перемещения (перемещения) из текущего положения в целевое парковочное место путем вождения на основе сигналов команд управления, полученных от устройства 100 управления парковкой. Устройство рулевого управления в соответствии с одним или несколькими вариантами осуществления настоящего изобретения представляет собой приводной механизм, который перемещает транспортное средство V в правом и левом направлениях. Двигатель EPS, включенный в систему 40 привода, приводит в действие механизм рулевого управления с усилителем рулевого управления устройства рулевого управления на основе сигналов команд управления, полученных от устройства 100 управления парковкой, для управления величиной рулевого управления и управления работой при движении транспортного средства V на целевое парковочное место. Содержание управления и схема работы для парковки транспортного средства V конкретно не ограничены, и любая схема, известная на момент подачи настоящей заявки, может быть соответствующим образом применена.
[0075]
Когда устройство 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения управляет транспортным средством V для перемещения в целевое парковочное место вдоль маршрута, вычисленного на основе положения транспортного средства V и положения целевого парковочного места, акселератор и тормоз управляются автономно на основе назначенной скорости транспортного средства (заданной скорости транспортного средства) управления, а работа устройства рулевого управления управляет движением транспортного средства V автономным образом в соответствии со скоростью транспортного средства.
[0076]
Способ управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения используется в устройстве управления парковкой, как указано выше, и поэтому демонстрирует следующие эффекты. Устройство 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения сконфигурировано и работает, как указано выше, и, следовательно, проявляет следующие эффекты.
[0077]
(1) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, когда относительная высота между первым положением по высоте оператора M и вторым положением по высоте транспортного средства V не меньше, чем первое предварительно определенное значение, первая скорость, которая предварительно установлена в инструкции управления, изменяется на вторую скорость, меньшую, чем первая скорость. То есть устройство 10 управления выполнено с возможностью повторного вычисления инструкции управления, в которой скорость движения транспортного средства V уменьшается, поскольку ситуация, в которой оператор M наблюдает за окружением транспортного средства V, из положения, имеющего относительную разность высот относительно транспортного средства V может быть определена как ситуация, которую оператору M трудно подтвердить. Снижая скорость в инструкции управления, можно облегчить движение транспортного средства V. Посредством этой операции, даже когда оператор M работает из положения, имеющего относительную разность высот относительно транспортного средства V1, оператор M может подтвердить движение транспортного средства V, и можно обеспечить работоспособность во время дистанционного управления и легкость подтверждения ситуации вокруг транспортного средства. Снижая скорость транспортного средства, оператор может быстро и легко приблизиться к транспортному средству, и подтверждение ситуации может быть легко выполнено вокруг транспортного средства.
[0078]
(2) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, когда разность между первым положением по высоте и вторым положением по высоте не меньше, чем первое предварительно определенное значение, транспортное средство V1 управляется, чтобы сделать остановку и, следовательно, оператор M может управлять транспортным средством V1 в течение достаточного времени.
[0079]
(3) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, когда разность между первым положением по высоте и вторым положением по высоте не меньше, чем первое предварительно определенное значение, выполнение инструкции управления для парковки транспортного средства V1 приостанавливается или отменяется. Таким образом, выполнение инструкции управления для транспортного средства V1 приостанавливается или отменяется, когда разность между первым положением по высоте и вторым положением по высоте не меньше, чем первое предварительно определенное значение, при котором начинается управление снижением скорости транспортного средства, и оператор поэтому М может выполнять операцию ввода с запасом.
[0080]
(4) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, когда разность между первым положением по высоте и вторым положением по высоте не меньше, чем первое предварительно определенное значение, операционный терминал 5 выполнен с возможностью запрещать прием операционной команды. Таким образом, операция ввода для операционной команды в операционный терминал 5 запрещается, когда разность между первым положением по высоте и второго положение по высоте не меньше, чем первое предварительно определенное значение, и поэтому оператор M может быть проинформирован о том, что операция невозможна. Сообщая, что ввод операции не может быть выполнен, можно направить оператора M в положение, в котором разность высот мала (положение на верхней стороне). В ситуации, когда разность высот велика, точность операции, выполняемой оператором M, не может быть обеспечена. Не получая ввод операции, можно предотвратить движение транспортного средства V1 на основе неверной входной информации.
[0081]
(5) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения ввод операции не принимается за счет предписания операционному терминалу 5 запрещать представление информации для приема операционной команды. Не отображая экран операций, оператор M может быть лишен возможности выполнять бесполезную операцию ввода, которая не может быть принята. Кроме того, когда экран операции не представлен, оператор M может тем самым распознать, что управление парковкой неисполнимо.
[0082]
(6) Когда расстояние между оператором M и транспортным средством V велико, оператору M может быть трудно визуально распознать транспортное средство V. В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, когда расстояние между оператором M и транспортным средством V не меньше, чем предварительно определенное расстояние, делается определение, что оператор M находится в состоянии затруднения при подтверждении транспортного средства V, и процесс изменения первой скорости на вторую скорость выполняется. Когда оператор M отделен от транспортного средства V, можно извлечь состояние, в котором трудно подтвердить окружение транспортного средства. В результате, когда оператору M трудно подтвердить окружение транспортного средства, скорость в инструкции управления может быть изменена на более низкое значение, что позволяет оператору M легко управлять.
[0083]
(7) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения обнаруживается препятствие, присутствующее вокруг транспортного средства V, и когда обнаруживается препятствие между оператором M и транспортным средством V, выполняется процесс изменения первой скорости, включенной в инструкцию управления, на вторую скорость. Скорость может быть уменьшена путем определения сцены, в которой существует препятствие между оператором M и транспортным средством V, и трудно подтвердить окружение транспортного средства. В результате, даже когда оператор M находится в относительно более низком положении и трудно подтвердить движение транспортного средства, оператор M может подтвердить движение транспортного средства V, и можно обеспечить работоспособность во время дистанционного управления и простоту подтверждения ситуации вокруг транспортного средства.
[0084]
(8) Также в устройстве 100 управления парковкой, в котором выполняется способ управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, демонстрируются действия и эффекты, как описано выше в (1) - (7).
[0085]
Описанные выше варианты осуществления описаны для облегчения понимания настоящего изобретения, но не для ограничения настоящего изобретения. Поэтому предполагается, что элементы, раскрытые в вышеуказанных вариантах осуществления, включают в себя все изменения в конструкции и эквиваленты, подпадающие под объем технических сведений в настоящем изобретении.
[Описание позиционных обозначений]
[0086]
1000 Система управления парковкой
100 Устройство управления парковкой
10 Устройство управления
11 ЦП
12 ПЗУ
13 ОЗУ
132 Запоминающее устройство
133 Картографическая информация
134 Информация о парковке
135 Информация о препятствии
20 Устройство ввода
21 Устройство связи
30 Устройство вывода
31 Дисплей
1a-1d Камеры
2 Дальномерные устройства
3 Информационный сервер
31 Устройство связи
32 Запоминающее устройство
33 Картографическая информация
34 Информация о парковке
35 Информация о препятствии
5 Операционный терминал
51 Устройство связи
52 Устройство ввода
53 Дисплей
200 Бортовое устройство
40 Система привода
50 Датчик угла поворота рулевого управления
60 Датчик скорости транспортного средства
70 Контроллер транспортного средства
V, V1 Транспортное средство
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2740661C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2742530C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2735340C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2736960C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2733300C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2740111C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И АППАРАТУРА УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2736520C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И ОБОРУДОВАНИЕ УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2746684C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И АППАРАТУРА УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2744447C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2730808C1 |

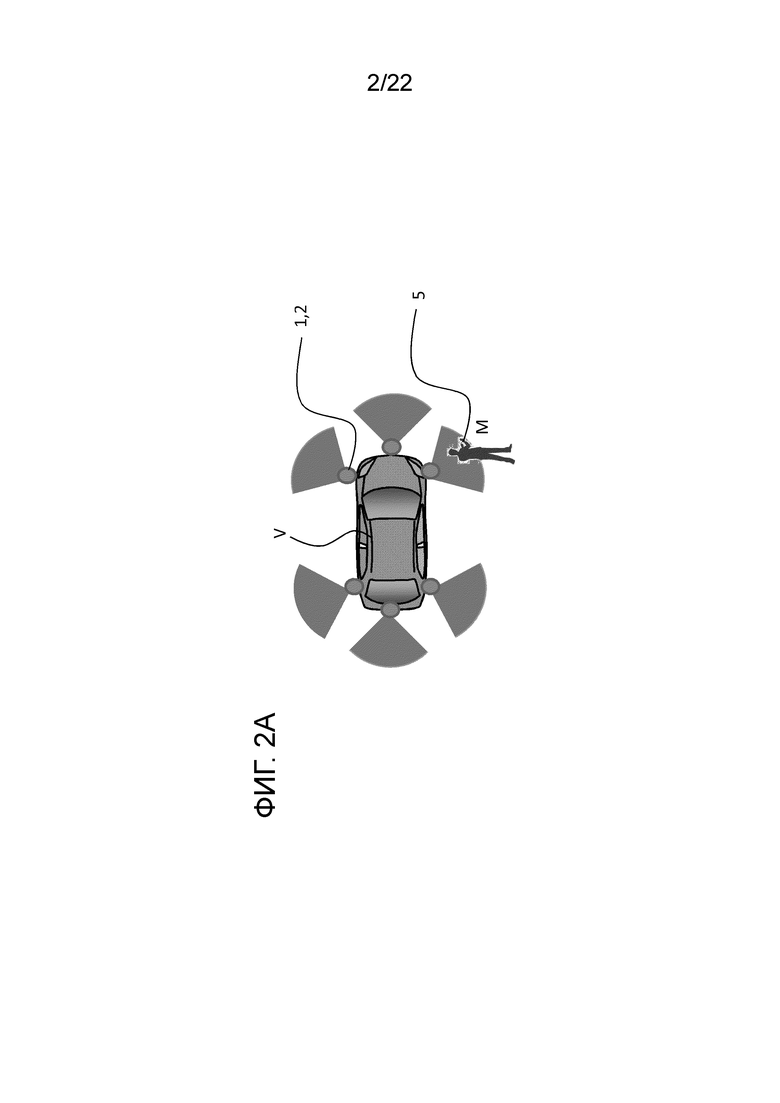
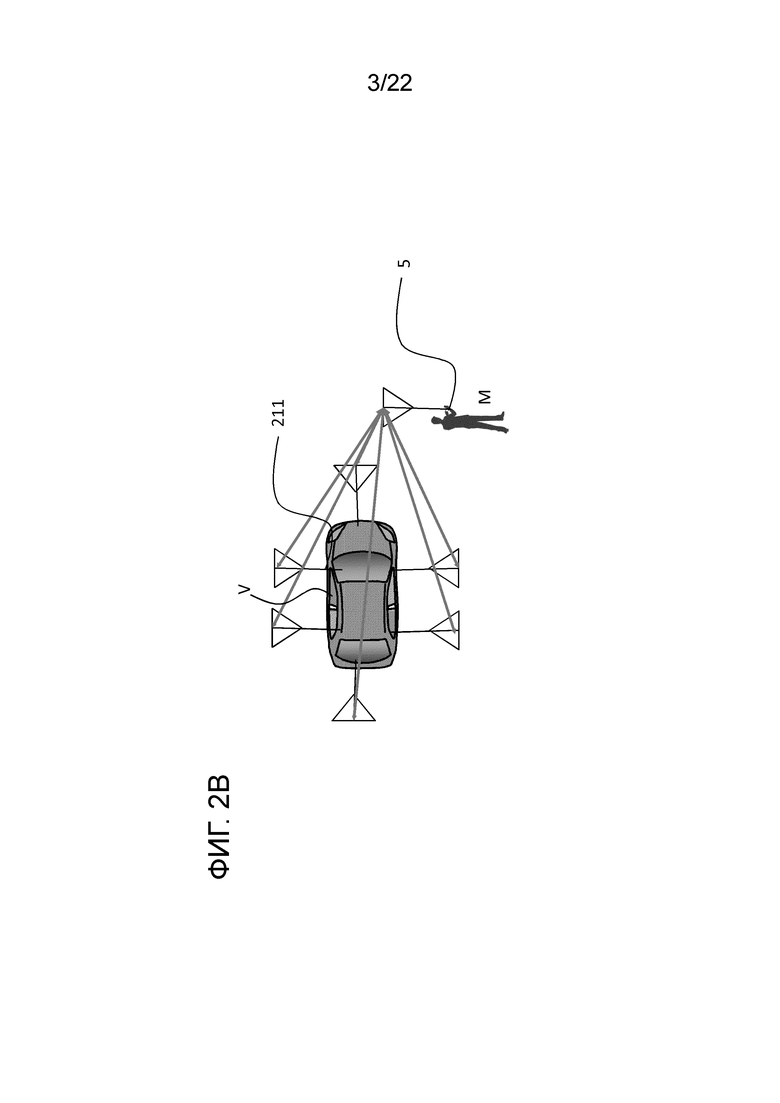
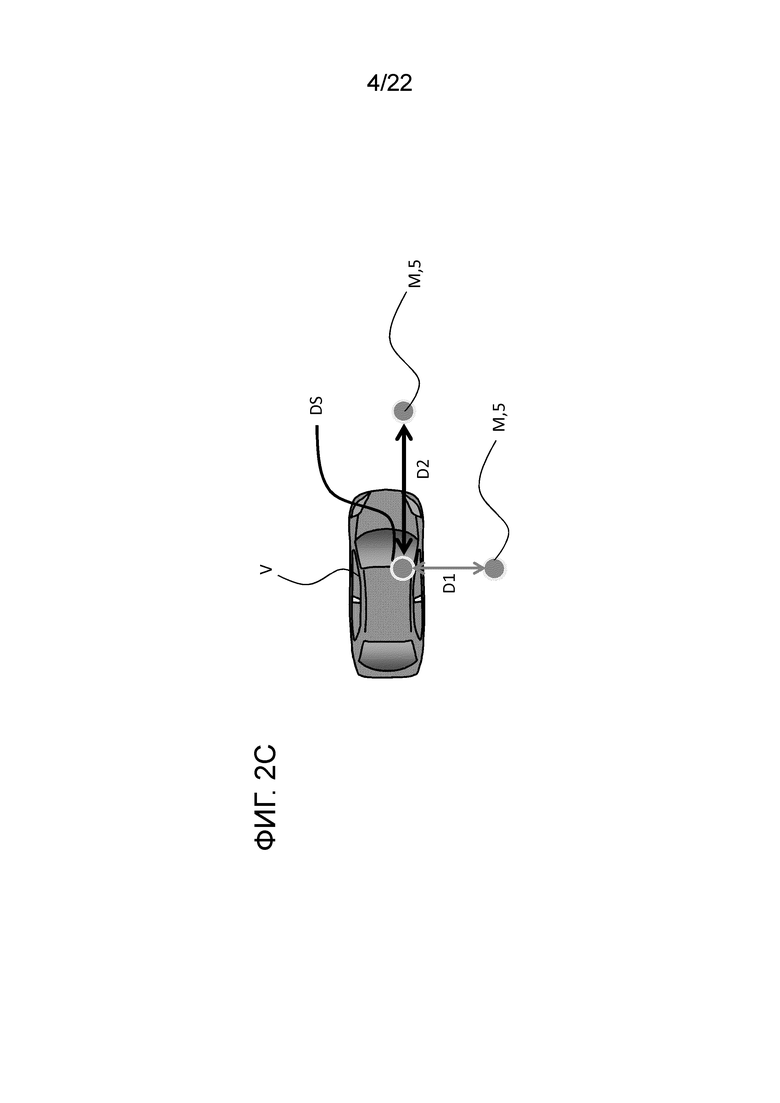
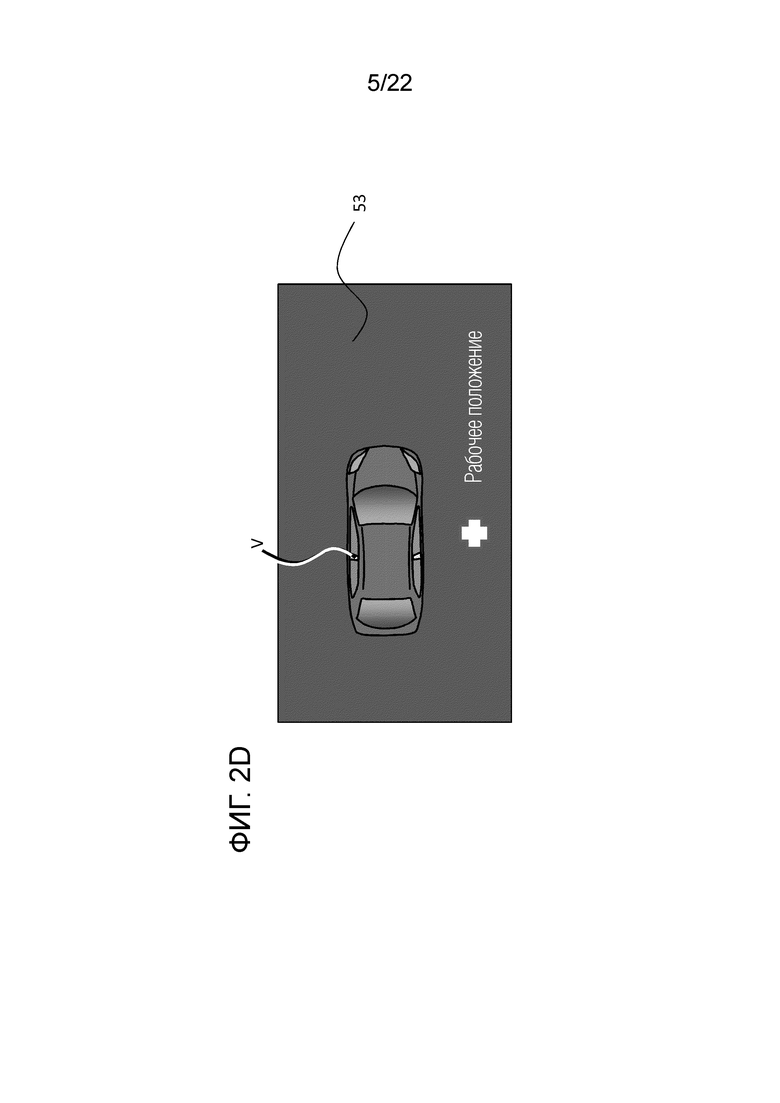












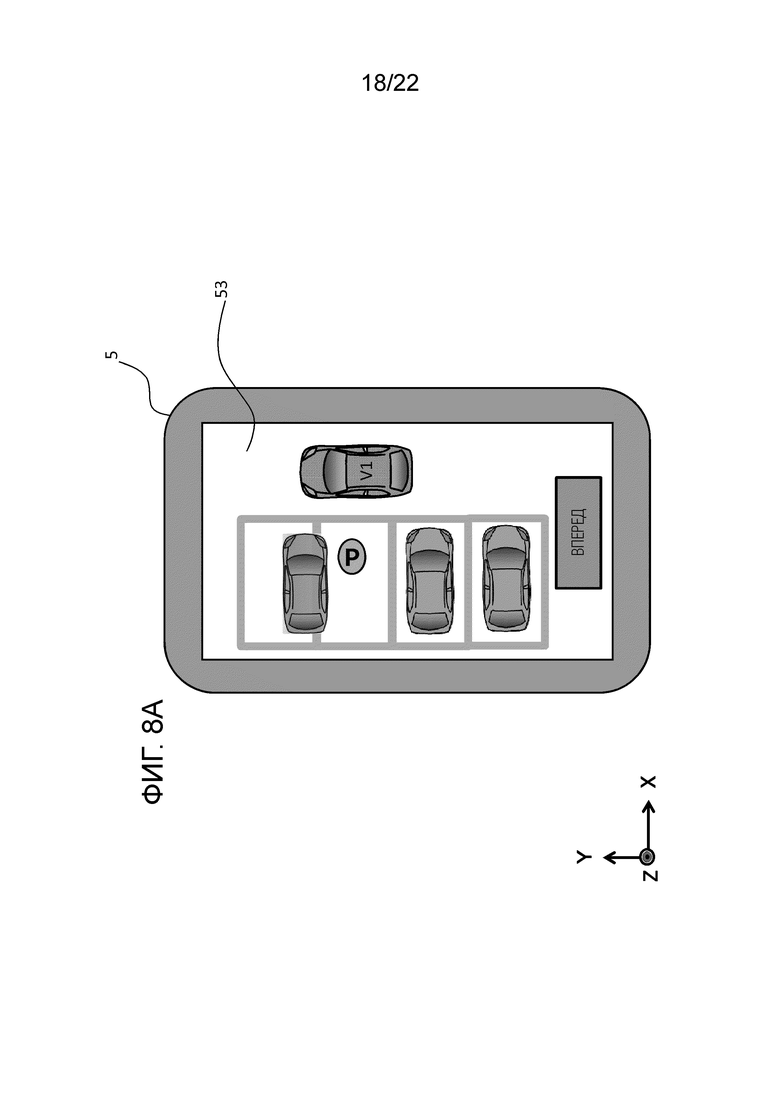


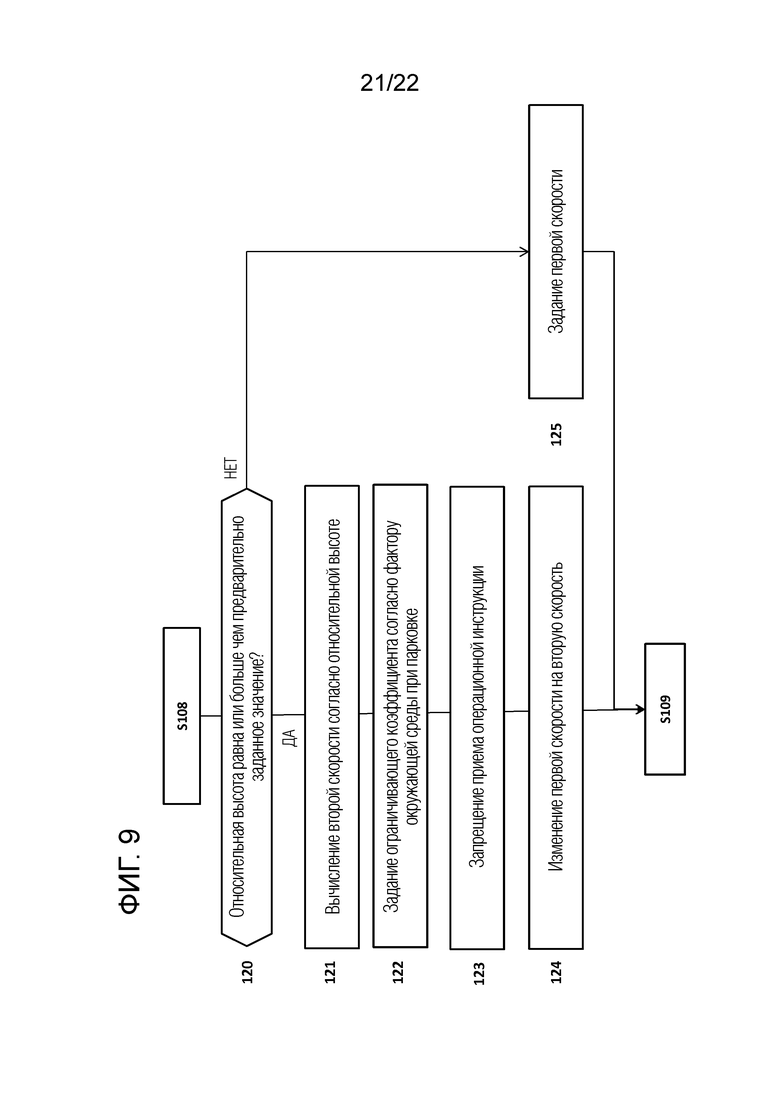
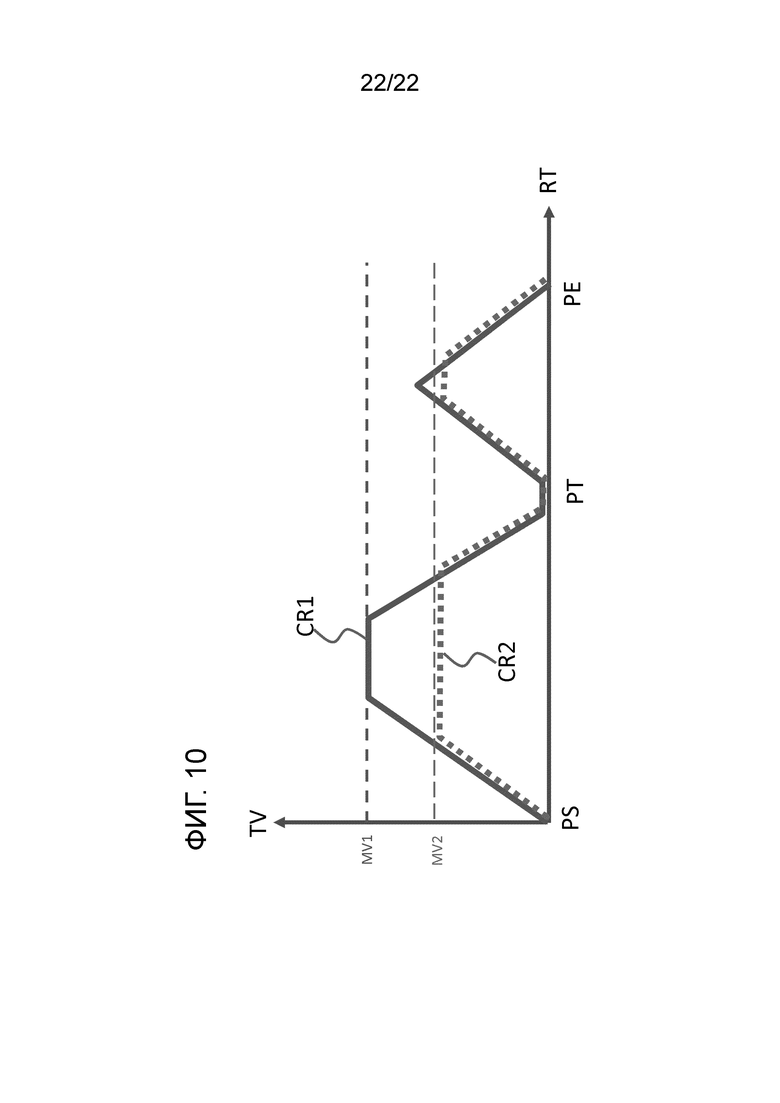
Изобретение относится к способу и устройству управления парковкой. Способ управления парковкой содержит этапы, на которых обнаруживают относительную высоту между первым положением по высоте оператора и вторым положением по высоте транспортного средства, когда высота первого положения по высоте оператора и высота второго положения по высоте транспортного средства отличаются и относительная высота между оператором и транспортным средством равна или больше, чем первый порог, и меньше, чем второй порог, перемещают транспортное средство по маршруту парковки на первой скорости, когда относительная высота равна или больше, чем второй порог, и меньше, чем третий порог, который больше, чем второй порог, перемещают транспортное средство по маршруту парковки на второй скорости и, когда относительная высота равна или больше, чем третий порог, приостанавливают или отменяют выполнение инструкции управления. Устройство управления парковкой содержит устройство управления, сконфигурированное для выполнения инструкции управления для перемещения транспортного средства по маршруту парковки. Маршрут парковки вычисляется на основе операционной команды, полученной от оператора, расположенного вне транспортного средства. Достигается своевременная парковка транспортного средства. 2 н. и 5 з.п. ф-лы, 22 ил.
1. Способ управления парковкой для выполнения инструкции управления для перемещения транспортного средства по маршруту парковки, причем маршрут парковки вычисляется на основе операционной команды, полученной от оператора, расположенного вне транспортного средства, причем способ управления парковкой содержит этапы, на которых:
обнаруживают относительную высоту между первым положением по высоте оператора и вторым положением по высоте транспортного средства;
когда высота первого положения по высоте оператора и высота второго положения по высоте транспортного средства отличаются и относительная высота между оператором и транспортным средством равна или больше, чем первый порог, и меньше, чем второй порог, перемещают транспортное средство по маршруту парковки на первой скорости, установленной в инструкции управления;
когда относительная высота равна или больше, чем второй порог, и меньше, чем третий порог, который больше, чем второй порог, перемещают транспортное средство по маршруту парковки на второй скорости, которая меньше, чем первая скорость, и больше чем ноль; и
когда относительная высота равна или больше, чем третий порог, приостанавливают или отменяют выполнение инструкции управления.
2. Способ управления парковкой по п. 1, в котором вторая скорость задается меньшей по мере того, как относительная высота увеличивается.
3. Способ управления парковкой по п. 1 или 2, содержащий этап, на котором:
когда относительная высота больше, чем третий порог, предписывают операционному терминалу, управляемому оператором, запрещать прием операционной команды, инструктирующей выполнять инструкцию управления.
4. Способ управления парковкой по любому из пп. 1-3, содержащий этап, на котором: когда относительная высота больше, чем третий порог, предписывают операционному терминалу, управляемому оператором, запрещать представление информации для приема операционной команды, инструктирующей выполнять инструкцию управления.
5. Способ управления парковкой по любому из пп. 1-4, содержащий этап, на котором:
когда расстояние между оператором и транспортным средством не меньше, чем предварительно определенное расстояние, изменяют первую скорость на вторую скорость.
6. Способ управления парковкой по любому из пп. 1-5, содержащий этапы, на которых:
обнаруживают препятствие, присутствующее вокруг транспортного средства; и
при обнаружении препятствия между оператором и транспортным средством изменяют первую скорость на вторую скорость.
7. Устройство управления парковкой, содержащее устройство управления, сконфигурированное для выполнения инструкции управления для перемещения транспортного средства по маршруту парковки, причем маршрут парковки вычисляется на основе операционной команды, полученной от оператора, расположенного вне транспортного средства, причем устройство управления работает для:
обнаружения относительной высоты между первым положением по высоте оператора и вторым положением по высоте транспортного средства;
когда высота первого положения по высоте оператора и высота второго положения по высоте транспортного средства отличаются и относительная высота между оператором и транспортным средством равна или больше, чем первый порог, и меньше, чем второй порог, перемещения транспортного средства по маршруту парковки на первой скорости, установленной в инструкции управления;
когда относительная высота равна или больше, чем второй порог, и меньше, чем третий порог, который больше, чем второй порог, перемещения транспортного средства по маршруту парковки на второй скорости, которая меньше, чем первая скорость, и больше чем ноль; и
когда относительная высота равна или больше, чем третий порог, приостанавливать или отменять выполнение инструкции управления.
| JP 2016074285 A, 12.05.2016 | |||
| WO 2015068032 A1, 14.05.2015 | |||
| JP 2014065392 A, 17.04.2014. |

