[Область техники]
[0001]
Настоящее изобретение относится к способу управления парковкой и аппаратуре управления парковкой.
[Уровень техники]
[0002]
Известен способ помощи при парковке для управления транспортным средством для остановки при обнаружении препятствия (патентный документ 1: JP2008– 74296A).
[Документ предшествующего уровня техники]
[Патентный документ]
[0003]
[Патентный Документ 1] JP2008–74296A
[Сущность изобретения]
[Задачи, решаемые изобретением]
[0004]
Однако в вышеупомянутом предшествующем уровне техники, когда обнаруживается препятствие, транспортное средство управляется так, чтобы сделать без исключения остановку даже в ситуации, в которой транспортное средство может продолжать движение.
[0005]
Задача, которая должна быть решена с помощью настоящего изобретения, состоит в том, чтобы позволить транспортному средству продолжать движение в соответствии с ситуацией, когда обнаружено препятствие.
[Средства для решения проблем]
[0006]
Настоящее изобретение решает вышеуказанную задачу путем вычисления первой области, наблюдаемой оператором за пределами транспортного средства, и второй области, ненаблюдаемой оператором, и вычисления маршрута парковки таким образом, чтобы первый уровень близости транспортного средства к препятствию в первой области был выше, чем второй уровень близости транспортного средства к препятствию во второй области.
[Эффект изобретения]
[0007]
Согласно настоящему изобретению, управление парковкой может продолжаться в первой области, наблюдаемой оператором, даже когда существует препятствие.
[Краткое описание рисунков]
[0008]
ФИГ. На фиг.1 показана блок–схема, иллюстрирующая пример системы управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения.
ФИГ. 2А – схема для описания первой схемы обнаружения позиции оператора.
ФИГ. 2B – схема для описания второй схемы обнаружения позиции оператора.
ФИГ. 2C – схема для описания третьей схемы обнаружения позиции оператора.
ФИГ. 2D представляет собой диаграмму для описания четвертой схемы обнаружения позиции оператора.
ФИГ. 3А – схема для описания первой схемы обнаружения препятствия.
ФИГ. 3B является схемой для описания второй схемы обнаружения препятствия.
ФИГ. 4А – схема для описания первой схемы вычисления для первой области и второй области (слепой зоны).
ФИГ. 4B является схемой для описания второй схемы вычисления для первой области и второй области (слепой зоны).
ФИГ. 4C является схемой для описания третьей схемы вычисления для первой области и второй области (слепой зоны).
ФИГ.5 – блок–схема последовательности операций, иллюстрирующая пример процедуры управления в системе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения.
ФИГ.6 – блок–схема последовательности операций, иллюстрирующая первый пример схемы установки уровня близости к препятствию.
ФИГ. 7А – первая схема для описания схемы установки уровня близости к препятствию.
ФИГ. 7B – вторая схема для описания схемы установки уровня близости к препятствию.
ФИГ. 7C – третья схема для описания схемы установки уровня близости к препятствию.
ФИГ. 7D – четвертая схема для описания схемы установки уровня близости к препятствию.
ФИГ. 7E – пятая схема для описания схемы установки уровня близости к препятствию.
ФИГ. 8 показывает блок–схему последовательности операций, иллюстрирующую схему установки времени начала замедления.
ФИГ. 9А – первая схема для описания схемы установки времени начала замедления.
ФИГ. 9B – вторая схема для описания схемы установки для времени начала замедления.
ФИГ. 9C – третья схема для описания схемы установки времени начала замедления.
ФИГ. 9D – четвертая схема для описания схемы установки времени начала замедления.
ФИГ. 9E является пятой схемой для описания схемы установки времени начала замедления.
ФИГ. 10 является блок–схемой, иллюстрирующей схему установки для замедления.
ФИГ. 11А – первая схема для описания схемы установки для замедления.
ФИГ. 11B – вторая схема для описания схемы установки для замедления.
ФИГ. 12 является блок–схемой, иллюстрирующей первый пример схемы вычисления для маршрута парковки.
ФИГ. 13А – первая схема для описания первого примера схемы вычисления для маршрута парковки.
ФИГ. 13B – вторая схема для описания первого примера схемы вычисления для маршрута парковки.
ФИГ. 14 является блок–схемой, иллюстрирующей второй пример схемы вычисления для маршрута парковки.
ФИГ. 15А – первая схема для описания второго примера схемы вычисления для маршрута парковки.
ФИГ. 15B – вторая схема для описания второго примера схемы вычисления для маршрута парковки.
ФИГ. 15C – третья схема для описания второго примера схемы вычисления для маршрута парковки.
ФИГ. 15D – четвертая схема для описания второго примера схемы вычисления для маршрута парковки.
ФИГ. 15E – пятая схема для описания второго примера схемы вычисления для маршрута парковки.
ФИГ. 16 является блок–схемой, иллюстрирующей третий пример схемы вычисления для маршрута парковки.
ФИГ. 17 является схемой для описания третьего примера схемы вычисления для маршрута парковки.
ФИГ. 18 является блок–схемой, иллюстрирующей четвертый пример схемы вычисления для маршрута парковки.
ФИГ. 19А – первая схема для описания четвертого примера схемы вычисления для маршрута парковки.
ФИГ. 19B – вторая схема для описания четвертого примера схемы вычисления для маршрута парковки.
ФИГ. 20 является блок–схемой, иллюстрирующей пятый пример схемы вычисления для маршрута парковки.
ФИГ. 21А – первая схема для описания пятого примера схемы вычисления для маршрута парковки.
ФИГ. 21B – вторая схема для описания пятого примера схемы вычисления для маршрута парковки.
ФИГ. 21C – третья схема для описания пятого примера схемы вычисления для маршрута парковки.
ФИГ. 22 является блок–схемой, иллюстрирующей шестой пример схемы вычисления для маршрута парковки.
ФИГ. 23А – первая схема для описания шестого примера схемы вычисления для маршрута парковки.
ФИГ. 23B – вторая схема для описания шестого примера схемы вычисления для маршрута парковки.
ФИГ. 23C – схема, иллюстрирующая пример представления рабочей позиции.
[Режим(ы) осуществления изобретения]
[0009]
Далее один или несколько вариантов осуществления настоящего изобретения будут описаны со ссылкой на чертежи.
В вариантах осуществления настоящее изобретение будет описано посредством примера случая, в котором аппаратура управления парковкой согласно настоящему изобретению применяется к системе управления парковкой. Аппаратура управления парковкой также может быть применена к портативному операционному терминалу (оборудованию, такому как смартфон или персональный цифровой помощник (PDA)), способному обмениваться информацией с бортовой аппаратурой. Способ управления парковкой в соответствии с настоящим изобретением может использоваться в аппаратуре управления парковкой, которая будет описана ниже.
[0010]
На фиг.1 показана блок–схема системы 1000 управления парковкой, включающей в себя аппаратуру 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения. Система 1000 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения включает в себя камеры 1a–1d, множественные дальномерные устройства 2, информационный сервер 3, операционный терминал 5, аппаратуру 100 управления парковкой, контроллер 70 транспортного средства, систему 40 привода, датчик 50 угла поворота рулевого колеса и датчик 60 скорости транспортного средства. Аппаратура 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения управляет операцией перемещения (парковки) транспортного средства в парковочное пространство на основе рабочей команды, которая вводится из операционного терминала 5.
[0011]
Операционный терминал 5 представляет собой портативный компьютер, который может быть выведен наружу из транспортного средства и имеет функцию ввода и функцию связи. Операционный терминал 5 принимает ввод рабочей команды оператора для управления вождением (работой) транспортного средства для парковки. Вождение включает в себя операции для парковки (операции для входа в парковочное пространство и выхода из парковочного пространства). Оператор вводит команды через рабочий терминал 5. Команды включают в себя рабочую команду (команду операции) для выполнения парковки. Рабочая команда включает в себя выполнение/остановку управления парковкой, выбор/изменение целевого парковочного места, выбор/изменение маршрута парковки и другую информацию, необходимую для парковки. Оператор также может заставить аппаратуру 100 управления парковкой распознавать команды, включающие в себя рабочую команду, без использования операционного терминала 5, например, жестом оператора.
Операционный терминал 5 включает в себя устройство связи и способен обмениваться информацией с аппаратурой 100 управления парковкой и информационным сервером 3. Операционный терминал 5 передает рабочую команду, которая вводится вне транспортного средства, в аппаратуру 100 управления парковкой через сеть связи и вводит рабочую команду в аппаратуру 100 управления парковкой. Операционный терминал 5 связывается с аппаратурой 100 управления парковкой, используя сигналы, включающие в себя уникальный идентификационный код.
Операционный терминал 5 включает в себя дисплей 53. Дисплей 53 представляет интерфейс ввода и различные элементы информации. Когда дисплей 53 является дисплеем типа сенсорной панели, он имеет функцию приема рабочей команды.
Операционный терминал 5 может быть портативным устройством, таким как смартфон или персональный цифровой помощник (PDA), в котором установлены приложения для приема ввода рабочей команды, используемой в способе управления парковкой, в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, и передачи рабочей команды на аппаратуру 100 управления парковкой.
[0012]
Информационный сервер 3 является устройством предоставления информации, предоставляемым в сети, способным к связи. Информационный сервер включает в себя устройство 31 связи и запоминающее устройство 32. Запоминающее устройство 32 включает в себя читаемую информацию 33 карты, информацию 34 о парковочном месте и информацию 35 о препятствиях. Аппаратура 100 управления парковкой и операционный терминал 5 могут иметь доступ к запоминающему устройству 32 информационного сервера 3, чтобы получать каждый элемент информации.
[0013]
Аппаратура 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения включает в себя устройство 10 управления, устройство 20 ввода и устройство 30 вывода. Эти компоненты аппаратуры 100 управления парковкой соединены друг с другом через локальную сеть контроллера (CAN) или другую бортовую локальную сеть для взаимного обмена информацией. Устройство 20 ввода включает в себя устройство 21 связи. Устройство 21 связи принимает рабочую команду, переданную от внешнего операционного терминала 5, и вводит рабочую команду в устройство 20 ввода. Субъектом, который вводит рабочую команду на внешний операционный терминал 5, может быть человек (пользователь, пассажир, водитель или работник парковочного объекта). Устройство 20 ввода передает принятую рабочую команду на устройство 10 управления. Устройство 30 вывода включает в себя дисплей 31. Устройство 30 вывода уведомляет водителя об информации управления парковкой. Дисплей 31 в соответствии с одним или несколькими вариантами осуществления настоящего изобретения представляет собой дисплей типа сенсорной панели, имеющий функцию ввода и функцию вывода. Когда дисплей 31 имеет функцию ввода, он служит в качестве устройства 20 ввода. Даже когда транспортное средство управляется на основе рабочей команды, которая вводится с операционного терминала 5, пассажир (водитель или пассажир) может вводить рабочую команду, такую как команда для экстренной остановки, через устройство 20 ввода.
[0014]
Устройство 10 управления аппаратуры 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения представляет собой конкретный компьютер, включающий в себя ROM 12, который хранит программу управления парковкой, CPU 11 в качестве операционной схемы, которая выполняет программу, сохраненную в ROM 12, чтобы служить в качестве аппаратуры 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, и RAM 13, которое служит в качестве доступного устройства хранения.
[0015]
Программа управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения представляет собой программу для вычисления первой области, наблюдаемой оператором M, из позиционного соотношения между позицией наблюдения, которая устанавливается на основе позиции оператора M, и позицией препятствия, вычисления маршрута парковки и команды управления для перемещения вдоль маршрута парковки, так что первый уровень близости транспортного средства к препятствию в первой области выше, чем второй уровень близости транспортного средства к препятствию во второй области, и выполнения управления парковкой для транспортного средства в соответствии с этой командой управления. Программа управления парковкой представляет собой программу для вычисления маршрута парковки и рабочей команды для перемещения по маршруту парковки таким образом, чтобы, по меньшей мере, часть транспортного средства находилась в первой области вдоль, по меньшей мере, части маршрута парковки транспортного средства, и выполнения управления парковкой для транспортного средства в соответствии с командой управления. Эта программа выполняется устройством 10 управления аппаратуры 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения. Первая область и вторая область могут быть вычислены с использованием результатов обнаружения препятствия, таких как размер и форма препятствия, в дополнение к позиции препятствия.
Аппаратура 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения представляет собой аппаратуру типа дистанционного управления, которая принимает рабочую команду от внешнего устройства и управляет перемещением транспортного средства для парковки транспортного средства в данное парковочное пространство. Во время этой операции пассажир может находиться за пределами салона транспортного средства или также может находиться внутри салона транспортного средства.
Аппаратура 100 управления парковкой согласно одному или нескольким вариантам осуществления настоящего изобретения может быть автоматизированного или автономного типа управления, в котором операция руления и операция ускорения/замедления выполняются автоматически или автономно. Аппаратура 100 управления парковкой также может быть полуавтоматического или полуавтономного типа, в котором операция руления выполняется автоматически или автономно, в то время как водитель выполняет операцию ускорения/замедления.
В программе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения пользователь может произвольно выбирать целевое парковочное пространство, или аппаратура 100 управления парковкой или сторона объекта парковки могут автоматически устанавливать целевое парковочное пространство.
[0016]
Устройство 10 управления аппаратуры 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения имеет функции выполнения процесса установки для позиции наблюдения, процесса вычисления для первой области и/или второй области, процесса вычисления для маршрута парковки, процесса вычисления для команды управления и процесса управления парковкой. Устройство 10 управления дополнительно имеет функции выполнения процесса обнаружения препятствий и вычисления маршрута парковки с учетом позиции препятствия. Каждый из вышеупомянутых процессов выполняется взаимодействием программного обеспечения для реализации процесса и вышеописанного аппаратного обеспечения.
[0017]
Процесс установки позиции наблюдения будет описан со ссылкой на фиг. 2А в 2D. Устройство 10 управления вычисляет позицию наблюдения на основе позиции оператора М. Устройство 10 управления получает позицию оператора М. Позиция оператора может быть обнаружена непосредственно на основе сигналов датчиков от датчиков, предоставляемых в транспортном средстве V, или также может быть получено путем обнаружения позиции операционного терминала 5, переносимого оператором M, и вычисления позиции оператора M на основе позиции операционного терминала 5. Операционный терминал 5 может предоставляться в заранее определенной позиции или также может переноситься оператором М. Когда операционный терминал 5 предоставляется в заранее определенной позиции, оператор М переходит в позицию, в которой предоставляется операционный терминал 5, и использует операционный терминал 5 там. В этих случаях позиция операционного терминала 5 может использоваться как позиция оператора М.
Как показано на фиг. 2А, позиция оператора М обнаруживается на основании результатов обнаружения множественных дальномерных устройств 2, предусмотренных в транспортном средстве, и/или изображений, захваченных камерами 1. Позиция оператора М может быть обнаружена на основе изображений, захваченных камерами 1a–1d. Каждое дальномерное устройство 2 для использования может представлять собой радарное устройство, такое как радар миллиметрового диапазона, лазерный радар или ультразвуковой радар или гидролокатор. Множественные дальномерные устройства 2 и их результаты обнаружения могут быть идентифицированы, и, следовательно, позиция оператора М может быть обнаружена на основе результатов обнаружения. Дальномерные устройства 2 могут быть обеспечены в тех же позициях, что и камеры 1a–1d, или могут также быть обеспечены в разных позициях. Устройство 10 управления также может обнаруживать жест оператора M на основе изображений, захваченных камерами 1a–1d, и идентифицировать рабочую команду, связанную с жестом.
Как показано на фиг. 2B, позиция операционного терминала 5 или оператора M, несущего операционный терминал 5, также может быть обнаружена на основе радиоволн связи между множественными антеннами 211, предоставленными в разных позициях транспортного средства V и операционного терминала 5. Когда множество антенн 211 обмениваются данными с одним рабочим терминалом 5, интенсивность принимаемой радиоволны каждой антенны 211 отличается. Позиция операционного терминала 5 может быть вычислена на основе разности интенсивности между принятыми радиоволнами антенн 211. Двумерная позиция и/или трехмерная позиция операционного терминала 5 или оператора М может быть вычислена из разности интенсивности между принятыми радиоволнами антенн 211.
Как показано на фиг. 2C, заранее определенная позиция (направление/расстояние: D1, D2) относительно сиденья DS водителя транспортного средства V могут быть предварительно обозначена как рабочая позиция оператора M или как позиция, в которой расположен операционный терминал 5. Например, когда оператор M временно останавливает транспортное средство V в заданной позиции и покидает транспортное средство V, чтобы управлять операционным терминалом 5, расположенным в предварительно определенной позиции, можно обнаружить начальную позицию оператора M относительно транспортного средства V или начальную позицию терминала 5, который переносится оператором М, относительно транспортного средства V.
Как показано на фиг. 2D, аналогичным образом, информация об изображении, представляющая рабочую позицию (позицию, в которой находится оператор M: рабочая позиция) относительно транспортного средства V, отображается на дисплее 53 операционного терминала 5. Это управление отображением может быть выполнено приложением, сохраненным на стороне операционного терминала 5, или также может быть выполнено на основе команды от устройства 10 управления.
[0018]
В одном или нескольких вариантах осуществления настоящего изобретения позиция наблюдения оператора M вычисляется для вычисления первой области, которую оператор M может визуально распознать, или второй области (слепой зоны), которую оператор M не может визуально распознать. При вычислении первой области (или второй области) обнаруженная двумерная позиция оператора М может быть вычислена как позиция наблюдения. В этом вычислении может учитываться положение глаза оператора М (информация о высоте). Позиция, соответствующая положению глаза оператора М, вычисляется как позиция наблюдения на основе двумерной позиции операционного терминала 5, полученной по вышеупомянутой схеме. Позиция наблюдения может быть вычислена с использованием предварительно установленной высоты стояния оператора М или средней высоты стояния взрослого. Когда сигнал обнаружения, представляющий информацию о местоположении операционного терминала 5, включает в себя информацию о высоте, позиция операционного терминала 5 может использоваться в качестве позиции наблюдения.
[0019]
Процесс обнаружения препятствия будет описан со ссылкой на фиг. 3А и 3В. Препятствия включают в себя конструкции, такие как стены и столбы парковочного места, установки вокруг транспортного средства, пешеходы, другие транспортные средства, припаркованные транспортные средства и т.д.
Как показано на фиг. 3A, препятствие обнаруживается на основе результатов обнаружения дальномерных устройств 2, предоставленных в транспортном средстве V, и изображений, захваченных камерами 1. Дальномерные устройства 2 обнаруживают присутствие или отсутствие объекта, позицию объекта, размер объекта и расстояние до объекта на основе принятых сигналов радиолокационных устройств. В дополнение или в качестве альтернативы, наличие или отсутствие объекта, позиция объекта, размер объекта и расстояние до объекта могут быть обнаружены на основе изображений, захваченных камерами 1a–1d. Обнаружение препятствия может быть выполнено с использованием технологии стерео движения с камерами 1a–1d. Результаты обнаружения используются для определения, является ли парковочное пространство пустым или нет (независимо от того, припарковано ли транспортное средство в парковочном пространстве).
Как показано на фиг. 3B, препятствия, включающие в себя конструкции, такие как стены и столбы парковки, могут быть обнаружены на основе информации 34 парковки, полученной из запоминающего устройства 32 информационного сервера 3. Информация о парковке включает в себя местоположение и идентификационный номер каждого парковочного места, а также позиционную информацию проходов, столбов, стен, мест для хранения и т.д. на парковке. Информационный сервер 3 может управляться персоналом парковки.
[0020]
Далее будет описан процесс вычисления для первой области и/или второй области. На основе взаимного расположения (позиционного соотношения) между позицией препятствия и позицией оператора М, устройство 10 управления вычисляет первую область, которую оператор М может наблюдать из вычисленной позиции наблюдения оператора М. Устройство 10 управления вычисляет в качестве первой области область, в которой поле зрения не затенено препятствием, когда оператор М наблюдает с позиции наблюдения. Устройство 10 управления вычисляет в качестве второй области область, в которой поле зрения затенено препятствием, когда оператор М наблюдает из позиции наблюдения. Вторая область, которая невидима или визуально не распознаваема оператором М, может быть вычислена по позиционному соотношению с препятствием. Слепая зона, вызванная не только препятствием, но и транспортным средством V, которое должно эксплуатироваться, также может быть установлена как вторая область, которая визуально не распознается. Устройство 10 управления вычисляет, в качестве второй области, область, в которой, когда оператор М наблюдает с позиции наблюдения, поле зрения затеняется транспортным средством, которое будет эксплуатироваться. Вторая область, которую оператор M не видит, может быть вычислена по позиционному соотношению с транспортным средством, подлежащим парковке. Как будет понятно, к препятствиям относятся другие транспортные средства, которые не являются объектами эксплуатации. С точки зрения уменьшения вычислительной нагрузки, устройство 10 управления может сначала вычислить вторую область и установить область, отличную от второй области, в качестве первой области. В дополнение или в качестве альтернативы, вторая область может быть установлена как относительно широкая область с учетом точности обнаружения препятствия и точности обнаружения позиции оператора М.
[0021]
ФИГ. 4А иллюстрирует пример случая, в котором возникает слепая зона из–за структуры парковки. В примере, показанном на фиг. 4A, транспортное средство M1 перемещается по маршруту RT парковки, и оператор M, стоящий сбоку от транспортного средства V1, управляет операционным терминалом 5. Устройство 10 управления вычисляет, в качестве первой области VA, область, которая может быть оценена как визуально распознаваемая без затенения другим объектом, когда оператор М наблюдает из позиции VP наблюдения. В примере по фиг. 4А поле зрения оператора М затенено стеной W парковки. Устройство 10 управления вычисляет в качестве второй области BA область, которая оценена как скрытая за стеной W и визуально не распознаваема, когда оператор M наблюдает из позиции VP наблюдения.
ФИГ. 4B иллюстрирует пример случая, когда возникает слепая зона из–за самого транспортного средства, которым нужно управлять. Устройство 10 управления в качестве первой области VA вычисляет область, которая может быть оценена как визуально распознаваемая без затенения другим объектом, когда оператор М наблюдает из позиции VP наблюдения. В примере по фиг. 4B, поле зрения оператора M затенено транспортным средством V2, которое расположено в позиции поворота для парковки на предполагаемом маршруте парковки. Устройство 10 управления вычисляет, в качестве второй области BA, область, которая оценивается как скрытая за транспортным средством V2 и визуально не распознаваемая, когда оператор M наблюдает из позиции VP наблюдения. Устройство 10 управления предварительно сохраняет информацию о транспортном средстве, такую как высота и размер транспортного средства, которая используется при вычислении второй области BA. Информация о транспортном средстве может быть информацией, уникальной для транспортного средства, или также может быть информацией, определенной в соответствии с типом транспортного средства и т.п.
Как показано на фиг. 4C, на основе интенсивности принятых радиоволн, генерации отраженных волн, возникновения помех и многолучевого распространения и т.д. между устройством 51 связи и антенной 511 операционного терминала 5 и устройством 21 связи и антеннами 211 устройства 21 связи аппаратуры 100 управления парковкой, наличие спрятанной части может быть определено из позиции стены парковки или формы пространства, а наличие слепой зоны может быть определено на основе результата определения.
[0022]
Устройство 10 управления вычисляет маршрут парковки и команду управления для перемещения по маршруту парковки так, что первый уровень близости транспортного средства V к препятствию в первой области VA выше, чем второй уровень близости транспортного средства V к препятствию во второй области BA. Устройство 10 управления вычисляет маршрут RT парковки и команду управления для транспортного средства V для перемещения по маршруту RT парковки так, что, по меньшей мере, часть транспортного средства V существует в первой области VA вдоль, по меньшей мере, части маршрута RT парковки транспортного средства V. Команда управления включает в себя скорость и ускорение/замедление при перемещении по маршруту RT парковки, позицию (время), в которой выполняется ускорение/замедление, позицию поворота для парковки, величину рулевого управления и т.д.
[0023]
Процедура управления для управления парковкой будет описана ниже со ссылкой на блок–схему, показанную на фиг. 5 .
На фиг.5 показана блок–схема последовательности операций, иллюстрирующая процедуру управления процессом управления парковкой, выполняемым системой 1000 управления парковкой, в соответствии с одним или несколькими вариантами осуществления настоящего изобретения. Инициирующий фактор для начала процесса управления парковкой конкретно не ограничен, и процесс управления парковкой может инициироваться с помощью операции пускового переключателя аппаратуры 100 управления парковкой.
[0024]
Аппаратура 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения имеет функцию перемещения транспортного средства V в автоматическом или автономном режиме в парковочное пространство на основе рабочей команды, полученной извне транспортного средства.
[0025]
На этапе 101 устройство 10 управления аппаратуры 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения получает сигналы дальности от дальномерных устройств 2, которые присоединены к множественным участкам транспортного средства V. Устройство 10 управления получает изображения, захваченные камерами 1a–1d, прикрепленными к множественным участкам транспортного средства V. Хотя это и не ограничивается конкретно, камера 1a расположена на передней решетке транспортного средства V, камера 1d расположена вблизи заднего бампера, и камеры 1b и 1c расположены на нижних частях правого и левого зеркал заднего вида. Каждая из камер 1a–1d может быть камерой, имеющей широкоугольный объектив с широким углом обзора. Камеры 1a–1d захватывают изображения пограничных линий парковочных пространств вокруг транспортного средства V и объектов, существующих вокруг парковочных пространств. Камеры 1a - 1d могут быть камерами CCD, инфракрасными камерами или другими соответствующими устройствами формирования изображения.
[0026]
На этапе 102 устройство 10 управления обнаруживает парковочные пространства, в которых возможна парковка. Устройство 10 управления обнаруживает кадры (области) парковочных мест на основе изображений, захваченных камерами 1a–1d. Устройство 10 управления обнаруживает пустые парковочные пространства, используя данные обнаружения дальномерных устройств 2 и данные обнаружения, извлеченные из захваченных изображений. Устройство 10 управления обнаруживает парковочные доступные пространства среди парковочных пространств. Парковочные доступные пространства – это парковочные пространства, которые пусты (т. е. другие транспортные средства не припаркованы) и к которым можно вычислить маршруты для завершения парковки.
В одном или нескольких вариантах осуществления настоящего изобретения условие, что маршрут парковки может быть вычислен, означает, что траектория маршрута от текущей позиции к целевому парковочному пространству может быть визуализирована по координатам дорожного покрытия без наложения на препятствия (включая припаркованные транспортные средства).
[0027]
На этапе 103 устройство 10 управления передает парковочные доступные места в операционный терминал 5, управляет дисплеем 53 для отображения парковочных доступных мест и запрашивает оператора ввести информацию о выборе целевого парковочного пространства для парковки транспортного средства. Целевое парковочное пространство может быть автоматически выбрано устройством 10 управления или стороной объекта парковки. Когда рабочая команда указания парковочного пространства вводится в операционный терминал 5, парковочное пространство устанавливается в качестве целевого парковочного пространства.
[0028]
В одном или нескольких вариантах осуществления настоящего изобретения пассажиры вынуждены выходить из транспортного средства на этапе 104. Затем транспортное средство перемещается в целевое парковочное пространство с помощью дистанционного управления. Целевое парковочное пространство может быть выбрано после того, как пассажиры выйдут из транспортного средства.
[0029]
На этапе 105 устройство 10 управления обнаруживает позицию оператора M с использованием ранее описанной схемы и вычисляет позицию VP наблюдения на основе позиции оператора M. На этапе 106 устройство 10 управления обнаруживает позицию, в которой препятствие существует, с использованием ранее описанной схемы.
[0030]
На этапе 107 вычисляется первая область, наблюдаемая оператором M с позиции VP наблюдения. Первая область вычисляется на основе позиции препятствия. Устройство 10 управления вычисляет вторую область, не наблюдаемую оператором M из позиции VP наблюдения. Вторая область вычисляется на основе позиции препятствия. Позиция препятствия относится к позиции области, в которой существует препятствие. Таким образом, позиция препятствия представлена значениями координат занятой области препятствием в трехмерных координатах.
[0031]
На этапе 108 устройство 10 управления вычисляет маршрут парковки от позиции остановки транспортного средства до целевого парковочного пространства. Маршрут парковки включает в себя позицию поворота, необходимую для перемещения на парковочное пространство. Здесь маршрут парковки определяется как линия и может также определяться как поясоподобная область, соответствующая занятой области транспортным средством в соответствии с шириной транспортного средства. Занятая область транспортным средством определяется с учетом ширины транспортного средства и ширины интервала, который обеспечивается для перемещения. На этом этапе устройство 10 управления вычисляет команду управления для транспортного средства для перемещения по маршруту парковки. Команда управления включает в себя рабочую команду для любого одного или нескольких из величины рулевого управления, скорости рулевого управления, ускорения рулевого управления, позиции переключения передачи, скорости, ускорения и замедления транспортного средства. Команда управления также включает в себя время выполнения или позицию выполнения вышеуказанной рабочей команды для транспортного средства.
[0032]
При управлении парковкой необходимо избегать чрезмерного сближения друг с другом транспортного средства, которым нужно управлять, и препятствий, которые вступают в контакт друг с другом от начала перемещения до завершения парковки. Маршрут парковки вычисляется на основе предположения, что между обнаруженным препятствием и транспортным средством сохраняется некоторая взаимосвязь близости/разнесения. В одном или нескольких вариантах осуществления настоящего изобретения «уровень близости» определяется как значение для количественной оценки взаимосвязи близости/разнесения между препятствием и транспортным средством при управлении парковкой.
Устройство 10 управления вычисляет маршрут парковки на основе уровня близости между транспортным средством V и препятствием. Уровень близости между транспортным средством V и препятствием относится к индексу, указывающему степень близости, которая разрешена между транспортным средством V и препятствием при вычислении маршрута парковки.
«Высокий уровень близости» означает, что транспортное средство и препятствие находятся в непосредственной близости друг от друга. «Низкий уровень близости» означает, что транспортное средство и препятствие разнесены друг от друга.
Уровень близости может быть представлен размером интервала, который позволяет транспортному средству V приближаться к препятствию, расстоянием поворота от препятствия до точки поворота для парковки или расстоянием от препятствия к маршруту парковки.
[0033]
Устройство 10 управления получает первый уровень близости и второй уровень близости. Первый уровень близости представляет степень близости транспортного средства к препятствию в первой области, в то время как второй уровень близости представляет степень близости транспортного средства к препятствию во второй области. Устройство 10 управления получает первый уровень близости и второй уровень близости так, что первый уровень близости выше, чем второй уровень близости, и вычисляет маршрут парковки на основе первого уровня близости и второго уровня близости. Степень близости между транспортным средством и препятствием в первой области может быть выше, чем степень близости между транспортным средством и препятствием во второй области. Маршрут парковки вычисляется так, что транспортное средство находится ближе к препятствию в первой области, чем во второй области. Если второй области не существует, первый уровень близости устанавливается выше стандартного уровня близости, который предварительно установлен, и маршрут парковки транспортного средства V вычисляется таким образом, чтобы первый уровень близости между транспортным средством и препятствием был меньше стандартный уровень близости.
[0034]
На этапе 120 по фиг. 6 подтверждается, что первая область была обнаружена на этапе 107 по фиг. 5. На этапе 121 подтверждается, что вторая область была обнаружена.
ФИГ. 7A иллюстрирует позиции V1, V2 и VP транспортного средства, которое перемещается для парковки. В ситуации, проиллюстрированной на фигуре, оператор M может визуально распознать, из позиции наблюдения на основе позиции оператора M, ситуацию, в которой транспортное средство приближается к препятствию вдоль маршрута парковки, пока транспортное средство не будет припарковано. В ситуации, проиллюстрированной на фигуре, слепая зона, вызванная стеной W в качестве препятствия, не образуется. Первая область VA, наблюдаемая оператором M, определяется между позицией наблюдения наблюдателя M и стеной W. На фиг. 7А иллюстрирует пример, в котором слепая зона, вызванная транспортным средством V, не установлена в качестве второй области. Таким образом, в ситуации, в которой оператор M может оценить слепую зону, вызванную транспортным средством V, слепая зона, вызванная транспортным средством V, не обязательно должна быть задана как вторая область.
[0035]
За обнаружением первой области VA и второй области BA следует этап 122, на котором первый уровень близости транспортного средства к препятствию в первой области VA установлен выше, чем второй уровень близости транспортного средства к препятствию во второй области BA (первый уровень близости > второго уровня близости). Этап 123 следует за не обнаружением второй области (слепой зоны), в котором устанавливается первый уровень близости. Чем короче размер интервала транспортного средства V до препятствия, тем выше уровень близости.
ФИГ. 7B иллюстрирует позиции V1, V2 и VP транспортного средства, которое перемещается для парковки. В ситуации, проиллюстрированной на фигуре, если смотреть с позиции наблюдения оператора M на основе позиции операционного терминала 5, правая передняя часть транспортного средства V2, расположенная в позиции поворота для парковки, принадлежит второй области BA, образованной благодаря стене W. Устройство 10 управления устанавливает второй уровень близости для передней правой части, в которой расстояние между транспортным средством V2 и стеной W является самым коротким. Второй уровень близости может быть установлен для каждой части транспортного средства V или также может быть установлен как значение, применяемое к транспортному средству в целом. Устройство 10 управления устанавливает второй уровень близости, представленный вторым размером интервала R2, который больше первого размера интервала R1, показанного на фиг. 7А (второй размер интервала > первого размера интервала R1). Это позволяет установить первый уровень близости транспортного средства V к препятствию в первой области VA выше, чем второй уровень близости транспортного средства V к препятствию во второй области BA.
[0036]
ФИГ. 7C иллюстрирует случай, в котором ненаблюдаемая вторая область формируется из–за транспортного средства V, которым нужно управлять. Также в таком случае вторая область обнаруживается, и делается определение, что транспортное средство V принадлежит второй области. Это сцена, в которой транспортное средство V и часть его периферии не могут наблюдаться. В ситуации, проиллюстрированной на фигуре, если смотреть с позиции наблюдения, основанной на позиции оператора M, левая передняя часть, передняя часть и правая передняя часть транспортного средства V2, расположенного в позиции поворота для парковки, принадлежат второй области BA, образованной за счет транспортного средства V2. Устройство 10 управления устанавливает второй размер интервала R21 для правой передней части и второй размер интервала R22 для передней левой части, причем расстояние между транспортным средством V2 и стеной W является заранее заданным значением или меньше. Устройство 10 управления устанавливает вторые размеры интервалов R21 и R22 на большие значения, чем первый размер интервала R1, показанный на фиг. 7А (вторые размеры интервалов R21 и R22 > первого размера интервала R1).
[0037]
ФИГ. 7D также иллюстрирует случай, в котором ненаблюдаемая вторая область формируется из–за транспортного средства V, которым нужно управлять. Этот пример представляет сцену, в которой противоположная сторона транспортного средства V и его окружение являются ненаблюдаемыми, потому что оператор М расположен на стороне транспортного средства V, которым нужно управлять. В ситуации, показанной на фигуре, если смотреть с позиции наблюдения оператора M, правая часть транспортного средства V2, движущаяся прямо вперед в направлении позиции поворота для парковки, принадлежит второй области BA, образованной благодаря транспортному средству V1. Устройство 10 управления устанавливает второй уровень R23 близости для правой части транспортного средства V1. Устройство 10 управления устанавливает второй размер интервала R23 в качестве большего расстояния, чем первый размер интервала R1, показанного на фиг. 7А (второй размер интервала R23 > первого размера интервала R1).
[0038]
ФИГ. 7E иллюстрирует случай, в котором ненаблюдаемая вторая область формируется из–за транспортного средства V, которым нужно управлять, и, в дополнение к этому, препятствие OB, отличное от стены W, существует во второй области. В ситуации, проиллюстрированной на фигуре, если смотреть с позиции наблюдения оператора M на основе позиции операционного терминала 5, вторая область BA формируется перед транспортным средством V2 благодаря транспортному средству V2, расположенному в позиции поворота для парковки. Препятствие OB существует во второй области BA. Уровень близости также определяется между препятствием OB и транспортным средством V2. Устройство 10 управления устанавливает второй размер интервала R24 между транспортным средством V2 и препятствием OB. Устройство 10 управления устанавливает второй размер интервала R24 равным большему значению, чем первый размер интервала R1, показанного на фиг. 7А (второй размер интервала R24 > первого размера интервала R1).
[0039]
В одном или нескольких вариантах осуществления настоящего изобретения первый уровень близости транспортного средства V к препятствию в первой области, наблюдаемой из позиции наблюдения, устанавливается выше, чем второй уровень близости транспортного средства V к препятствию во второй области, не наблюдаемой с позиции наблюдения. Первый уровень близости может представлять степень близости к препятствию, когда транспортное средство V перемещается в первой области, и второй уровень близости может представлять степень близости к препятствию, когда транспортное средство V перемещается во второй области. В области, наблюдаемой оператором M, транспортному средству и препятствию разрешено приближаться друг к другу ближе, чем в области, не наблюдаемой оператором M. Таким образом, уровень близости между транспортным средством и препятствием можно регулировать в соответствии с ситуацией наблюдения оператора М.
В первой области, наблюдаемой оператором, транспортное средство перемещается, приближаясь к препятствию ближе, чем во второй области; следовательно, даже если препятствие существует, управление парковкой может быть продолжено. Процесс управления парковкой не прерывается без исключения из–за наличия препятствия, поскольку в зависимости от ситуации, транспортному средству и препятствию разрешается приближаться ближе друг к другу. Как правило, зазор (размер интервала) между транспортным средством и препятствием устанавливается с учетом безопасности. Чем больше зазор (размер интервала), тем выше безопасность, но вероятность и частота прерывания процесса управления парковкой будут высокими, а комфорт и удобство использования могут быть принесены в жертву, поскольку требуются дополнительные операции и команды от оператора. В соответствии со способом управления парковкой в одном или нескольких вариантах осуществления настоящего изобретения первый уровень близости, применяемый в первой области, изменяется на значение, которое относительно выше, чем второй уровень близости, применяемый во второй области; следовательно, количество сцен, в которых процесс управления парковкой продолжается, увеличивается, и могут быть достигнуты как комфорт, так и удобство использования и безопасность.
[0040]
Хотя это и не ограничено конкретно, первый уровень близости представлен первым размером интервала, который позволяет транспортному средству V приближаться к препятствию в первой области, а второй уровень близости представлен вторым размером интервала, который позволяет транспортному средству V приближаться к препятствию во второй области. Первый размер интервала может быть выражен длиной (расстоянием). Первый размер интервала установлен короче, чем второй размер интервала.
[0041]
Первый уровень близости может быть представлен первым расстоянием поворота от препятствия до первой позиции поворота, принадлежащей первой области VA, а второй уровень близости может быть представлен вторым расстоянием поворота от препятствия до второй позиции поворота, принадлежащей ко второй области. Маршрут парковки, используемый в процессе управления парковкой, включает в себя позицию поворота для парковки, при котором направление перемещения переключается. Позиция транспортного средства V2 на фиг. 7А соответствует первой позиции поворота, а позиция транспортного средства V2 на фиг. 7В соответствует второй позиции поворота. На маршруте парковки вероятность приблизиться к препятствию наиболее высока в позиции поворота для парковки. Когда, по меньшей мере, часть транспортного средства V существует в первой области в первой позиции поворота, уровень близости устанавливается выше, чем когда, по меньшей мере, часть транспортного средства V существует во второй области во второй позиции поворота. Устройство 10 управления устанавливает первое расстояние поворота короче, чем второе расстояние поворота. Это позволяет первой позиции поворота и препятствию подходить относительно близко друг к другу в первой области VA, и процесс управления парковкой может быть продолжен. Первое расстояние поворота и второе расстояние поворота могут быть каждое установлены на расстояние до наружного кузова транспортного средства V, ближайшего к препятствию.
[0042]
Первый уровень близости может быть представлен первым расстоянием разнесения от препятствия до маршрута RT парковки, а второй уровень близости может быть представлен вторым расстоянием разнесения от препятствия до маршрута RT парковки. При вычислении маршрута парковки маршрут парковки генерируется таким образом, что каждая точка на маршруте парковки отделена от препятствия на заранее определенное расстояние. Заранее определенное расстояние может быть предварительно установлено в соответствии с размером транспортного средства и зазором (размером интервала) до препятствия. Первое расстояние разнесения, когда маршрут парковки существует в первой области, устанавливается короче, чем второе расстояние разнесения, когда маршрут парковки существует во второй области. В частности, зазор (размер интервала) до препятствия на первом расстоянии разнесения устанавливается короче, чем зазор (размер интервала) до препятствия на втором расстоянии разнесения. Это позволяет маршруту парковки и препятствию приблизиться друг к другу ближе в первой области VA, чем во второй области BA, и процесс управления парковкой может быть продолжен.
[0043]
Вычисление команды управления будет описано ниже.
На этапе S108 по фиг. 5 устройство 10 управления генерирует команду управления для транспортного средства для перемещения по маршруту RT парковки. Подпрограмма для генерации команды управления будет описана ниже. Команда управления включает в себя одно или несколько из времени начала замедления, расстояния завершения замедления, замедления и целевой скорости при приближении к препятствию.
[0044]
Сначала будет описана схема установки времени начала замедления в команде управления.
На этапе 140 по фиг. 8 подтверждается существование первой области, и на этапе 141 подтверждается существование второй области. На этапе 142 устройство 10 управления генерирует рабочую управления, которая включает в себя время начала замедления для начала замедления транспортного средства. Время начала замедления является формой уровня близости. Задержка времени начала замедления для начала замедления, выполняемого при приближении к препятствию, означает, что замедление начинается после приближения к препятствию. Задержка времени начала замедления означает, что уровень близости увеличен. С другой стороны, увеличение времени начала замедления означает, что уровень близости снижен.
ФИГ. 9А и фиг. 9B каждая иллюстрирует маршрут RT парковки, который проходит через первую область VA и вторую область BA. ФИГ. 9А иллюстрирует состояние, в котором препятствие OB2 существует перед транспортным средством V2, расположенным в позиции поворота для парковки. Препятствие OB2 принадлежит второй области VA. ФИГ. 9B иллюстрирует состояние, в котором препятствие OB1, принадлежащее первой области VA, существует перед транспортным средством V2, расположенным в позиции поворота для парковки.
На этапе 142 устройство 10 управления устанавливает первое время T1 начала замедления или второе время T2 начала замедления. Первое время T1 начала замедления является временем для начала замедления при приближении к препятствию OB1, а второе время T2 начала замедления является временем для начала замедления при приближении к препятствию OB2. Устройство 10 управления вычисляет команду управления таким образом, чтобы первое время T1 начала замедления был более поздним временем, чем второе время T2 начала замедления. ФИГ. 9C иллюстрирует второе время T2 начала замедления, когда существует препятствие OB2. ФИГ. 9D иллюстрирует первое время T1 начала замедления, когда существует препятствие OB1. Первое время T1 начала замедления является более поздним временем, чем второе время T2 начала замедления. Расстояние между позицией транспортного средства V и препятствием OB1 в первое время T1 начала замедления короче, чем расстояние между позицией транспортного средства V и препятствием OB2 во второе время T2 начала замедления. Устройство 10 управления управляет транспортным средством для перемещения по маршруту парковки в соответствии с вычисленной командой управления. Посредством задания первого времени начала замедления более поздним, чем второе время начала замедления, время для прохождения через первую область может быть сокращено. В результате время, требуемое от начала парковки до завершения парковки, может быть сокращено. Когда обнаруживается только первая область, генерируется команда управления для процесса управления парковкой, включающего в себя первое время T1 начала замедления.
Время начала замедления может быть выражено временем, соответствующим скорости приближения между транспортным средством и препятствием. Время, соответствующее скорости приближения, вычисляется как TTC: время до столкновения, то есть время перед столкновением. Первое временя начала замедления задается как первое TTC, а второе время начала замедления задается как второе TTC. Транспортное средство V начинает замедляться во время, когда вычисленное TTC становится короче, чем установленное первое TTC или второе TTC. При установке первого TTC короче, чем второе TTC, время начала замедления для начала замедления, выполняемого в первой области при приближении к препятствию, задерживается по сравнению с таковым во второй области, и замедление начинается после приближения к препятствию. Задержка времени начала замедления означает, что уровень близости увеличивается. С другой стороны, увеличение времени начала замедления означает, что уровень близости снижается.
[0045]
Фиг.9E иллюстрирует временное изменение скорости в команде управления. Команда управления при перемещении по первой области указана сплошной линией, а команда управления при перемещении по второй области (слепой зоне) указана пунктирной линией. Как проиллюстрировано на чертеже, первое время T1 начала замедления в первой области является временем позже, чем второе время T2 начала замедления во второй области.
[0046]
С той же точки зрения может быть установлено расстояние завершения замедления. Устройство 10 управления генерирует команду управления, которая включает в себя расстояние завершения замедления до точки завершения замедления, в которой замедление транспортного средства завершено. Расстояние завершения замедления является формой уровня близости. Сокращение расстояния завершения замедления от точки, в которой замедление, выполненное при приближении к препятствию, завершается до позиции препятствия, означает, что замедление завершается в состоянии приближения как можно ближе к препятствию. Сокращение расстояния завершения замедления означает, что уровень близости увеличивается. С другой стороны, увеличение расстояния завершения замедления означает, что уровень близости снижается. Этот процесс может быть выполнен вместе с или вместо вышеописанного этапа 142 на фиг. 8. Делая первое расстояние завершения замедления короче, чем второе расстояние завершения замедления, чтобы позволить транспортному средству приближаться как можно ближе к препятствию, транспортное средство может продолжать перемещаться при управлении парковкой.
[0047]
Далее будет описана схема установки замедления в команде управления.
На этапе 150 на фиг. 10 существование первой области подтверждается, и на этапе 151 подтверждается существование второй области. Устройство 10 управления генерирует команду управления, которая включает в себя замедление транспортного средства. Замедление является формой уровня близости. Высокое замедление, выполняемое при приближении к препятствию, означает, что уровень близости, который представляет степень близости к препятствию, является высоким. С другой стороны, низкое замедление означает, что уровень близости, который представляет степень близости к препятствию, является низким.
ФИГ. 11А и фиг. 11B каждая иллюстрирует маршрут RT парковки, который проходит через первую область VA и вторую область BA. ФИГ. 11А иллюстрирует состояние, в котором препятствие OB2 существует перед транспортным средством V2, расположенным в позиции поворота для парковки. Препятствие OB2 принадлежит второй области VA. ФИГ. 11B иллюстрирует состояние, в котором препятствие OB1, принадлежащее первой области VA, существует перед транспортным средством V2, расположенным в позиции поворота для парковки.
На этапе 152 устройство 10 управления устанавливает первое замедление S1 и второе замедление S2. Первое замедление S1 – это замедление при приближении к препятствию OB1, а второе замедление S2 – это замедление при приближении к препятствию OB2. Замедление включает в себя скорость во время замедления или ускорение во время замедления. Устройство 10 управления вычисляет команду управления так, что первое замедление S1 является более высоким значением, чем второе замедление S2. В ситуации фиг. 11A, генерируется команда управления, в которой второе замедление S2 (<S1) установлено, и в ситуации фиг. 11B, генерируется команда управления, в которой установлено первое замедление S1 (> S2). Первое замедление m1 и второе замедление m2 проиллюстрированы на ранее описанной фиг. 9E. Фиг.9E иллюстрирует временное изменение скорости в команде управления. Команда управления при перемещении по первой области указана сплошной линией, а команда управления при перемещении по второй области (слепой зоне) указана пунктирной линией. Как показано на чертеже, первое замедление m1 в первой области больше, чем второе замедление m2 во второй области.
Устройство 10 управления управляет транспортным средством для перемещения по маршруту парковки в соответствии с вычисленной командой управления. Делая первое замедление выше, чем второе замедление, время для прохождения через первую область может быть сокращено. В результате время, требуемое от начала парковки до завершения парковки, может быть сокращено. Когда обнаруживается только первая область, генерируется команда управления для процесса управления парковкой, включающего в себя первое замедление S1.
[0048]
С той же точки зрения, может быть установлено значение ограничения относительной скорости транспортного средства V для оператора. Значение ограничения относительной скорости – это значение, которое определяет ограничение относительной скорости между транспортным средством и оператором. Устройство 10 управления устанавливает первое значение ограничения относительной скорости транспортного средства в первой области и второе значение ограничения относительной скорости транспортного средства во второй области. Этот процесс может выполняться вместе с или вместо вышеописанного этапа 142 на фиг. 8. Делая первое значение ограничения относительной скорости выше второго значения ограничения относительной скорости, время прохождения через первую область может быть сокращено. В результате время, требуемое от начала парковки до завершения парковки, может быть сокращено.
[0049]
Далее будет описана схема вычисления маршрута парковки транспортного средства RT.
Устройство 10 управления вычисляет маршрут RT парковки таким образом, чтобы, по меньшей мере, часть транспортного средства V существовала в первой области VA вдоль, по меньшей мере, части маршрута RT парковки транспортного средства. Устройство 10 управления вычисляет маршрут RT парковки так, чтобы часть транспортного средства V можно было видеть из позиции наблюдения, по меньшей мере, временно, пока транспортное средство V перемещается вдоль маршрута RT парковки. Это позволяет оператору подтверждать наличие и позицию транспортного средства V во время процесса управления парковкой. Можно избежать ситуации, в которой маршрут RT парковки вычисляется так, что оператор не может подтвердить наличие и позицию транспортного средства V во время процесса управления парковкой.
Маршрут парковки RT может быть вычислен так, что длина маршрута, вдоль которого, по меньшей мере, часть транспортного средства V существует в первой области VA, имеет заранее определенное соотношение по отношению ко всей длине маршрута парковки RT. Заранее определенное соотношение предпочтительно является высоким (близко к 1 (одному)), но может быть установлено с учетом баланса с возможностью того, что маршрут RT парковки может быть вычислен. Например, маршрут парковки, имеющий самое высокое соотношение, может быть выбран из маршрутов RT парковки, которые могут быть вычислены в диапазоне, в котором число поворотов для парковки не увеличивается.
[0050]
В одном или нескольких вариантах осуществления настоящего изобретения, когда, по меньшей мере, часть маршрута RT парковки принадлежит второй области BA (слепой зоне), маршрут RT парковки вычисляется таким образом, что, по меньшей мере, часть транспортного средства V существует в первой области VA.
На этапе 190 по фиг. 12, устройство 10 управления определяет, включена ли, по меньшей мере, часть предварительно вычисленного маршрута RT парковки во вторую область BA. ФИГ. 13A иллюстрирует пример случая, в котором весь предварительно вычисленный маршрут RT1 парковки включен во вторую область BA. Также возможен другой случай, в котором часть маршрута RT1 парковки принадлежит второй области BA. На этапе 191 маршрут RT парковки вычисляется как предложение по исправлению так, что часть транспортного средства V существует в первой области VA вдоль, по меньшей мере, части маршрута RT1 парковки. Когда может быть использован новый маршрут парковки, маршрут парковки обновляется на этапе 192. В примере, показанном на фиг. 13B, маршрут RT2 парковки заново вычисляется как предложение по исправлению, в котором передняя левая часть V121 движущегося транспортного средства V12 принадлежит первой области VA. На этом маршруте RT2 парковки задняя левая часть V21 транспортного средства V2, расположенная в позиции поворота для парковки, принадлежит первой области VA. Когда маршрут RT2 парковки предложения по исправлению может быть сгенерирован до целевой позиции VP парковки без наложения на препятствия (включая припаркованные транспортные средства), маршрут RT2 парковки используется в качестве замены для предварительно вычисленного маршрута RT1 парковки.
Маршрут RT парковки корректируется, когда, по меньшей мере, часть маршрута RT парковки принадлежит второй области BA, и поэтому процесс управления парковкой может выполняться вдоль маршрута RT парковки, который оператор может легко наблюдать. При парковке с помощью дистанционного управления, оператор может легко подтвердить позицию и перемещение транспортного средства V.
[0051]
В одном или нескольких вариантах осуществления настоящего изобретения, маршрут RT парковки вычисляется таким образом, чтобы, по меньшей мере, часть транспортного средства V существовала в первой области VA, когда оно находится в позиции поворота для парковки, которая включена в маршрут RT парковки.
На этапе 201 по фиг. 14 устройство 10 управления определяет, находится ли транспортное средство V во второй области, когда находится в позиции поворота для парковки, которая включена в маршрут RT парковки. Весьма возможно, что позиция поворота для парковки является позицией, в которой транспортное средство V находится дальше всего от оператора и, следовательно, его трудно наблюдать. Смена направления выполняется в позиции поворота для парковки, поэтому оператор стремится уделять больше всего внимания.
Устройство 10 управления вычисляет маршрут RT парковки, который позволяет оператору легко наблюдать за транспортным средством V, расположенным в позиции поворота для парковки. На этапе 202, устройство 10 управления устанавливает позицию поворота для парковки таким образом, чтобы, по меньшей мере, часть транспортного средства существовала в первой области VA, когда оно находится в позиции поворота для парковки. На этапе 203, вычисляется маршрут, включающий в себя позицию поворота для парковки.
В примере, показанном на фиг. 15A, большая часть транспортного средства V2, расположенного в позиции поворота для парковки, включена во вторую область BA. Даже в таком случае, маршрут RT парковки вычисляется так, что задняя левая часть V21, которая является, по меньшей мере, частью транспортного средства V, принадлежит первой области VA. По меньшей мере, часть транспортного средства V, существующая в наблюдаемой первой области VA, позволяет оператору выполнять операцию парковки при оценке позиции транспортного средства V. Если транспортное средство V вообще не видно, позиция транспортного средства V не может быть даже оценена, поэтому будет трудно продолжить операцию парковки. Напротив, вышеупомянутая схема может гарантировать возможность выполнения операции парковки.
Как будет понятно, как показано на фиг. 15B, маршрут RT парковки может быть вычислен так, что все транспортное средство принадлежит первой области VA, то есть вторая область BA не включает в себя какую–либо часть транспортного средства V.
[0052]
Устройство 10 управления может вычислять маршрут RT парковки так, что конкретная часть транспортного средства V существует в первой области VA. Как показано на фиг. 15C, устройство 10 управления вычисляет маршрут RT парковки так, чтобы часть бокового зеркала принадлежала первой области VA, поскольку такая часть бокового зеркала имеет высокую вероятность контакта с препятствием. Конкретная часть может быть частью, выступающей наружу во внешнем корпусе транспортного средства V и, таким образом, имеющей высокую вероятность сближения с препятствием. Конкретная часть может быть частью бокового зеркала, как описано выше, подвеской для велосипеда, предусмотренной в задней части транспортного средства, держателем запасного колеса или другой подобной частью. Это позволяет оператору парковаться посредством дистанционной операции, наблюдая за конкретной частью, на которую следует обратить внимание.
[0053]
Устройство 10 управления может предварительно определять конкретную часть, которая включена в первую область VA, транспортного средства V в соответствии с формой парковки. Как показано на фиг. 15D, когда транспортное средство перемещается назад и затем припаркуется вперед в парковочное пространство, устройство 10 управления определяет правую или левую заднюю часть (угловую часть) в качестве конкретной части. Когда выполняется поворот вправо, передняя правая часть или часть зеркала или задняя правая часть могут быть определены как конкретная часть. Когда выполняется поворот влево, передняя левая часть или часть зеркала или задняя левая часть могут быть определены как конкретная часть. То есть, в случае правого поворота при парковке вперед, правая часть зеркала может быть установлена в качестве конкретной части. При выполнении парковки задним ходом, устройство 10 управления вычисляет маршрут RT парковки так, что правая или левая задняя часть принадлежит первой области VA. Это позволяет оператору парковаться посредством дистанционной операции, одновременно наблюдая за конкретной частью, на которую следует обратить внимание.
[0054]
Устройство 10 управления может вычислять маршрут парковки так, чтобы, по меньшей мере, часть транспортного средства V существовала в первой области, когда расстояние между транспортным средством V и препятствием, обнаруженным вокруг транспортного средства, меньше предварительно определенного значения. Как показано на фиг. 15E, при условии, что транспортное средство V перемещается по предварительно вычисленному маршруту RT парковки, устройство 10 управления вычисляет маршрут RT парковки так, что задняя правая часть V21, которая является, по меньшей мере, частью транспортного средства V, принадлежит первой области VA, когда определено, что расстояние между стеной W парковки в качестве препятствия и транспортным средством V меньше предварительно определенного значения. Устройство 10 управления может вычислять маршрут RT парковки так, чтобы часть транспортного средства V, которая находится ближе всего к препятствию, принадлежала первой области VA. В этом примере, препятствием, к которому ближе всего подходит транспортное средство V, является стена W парковки, и поэтому маршрут RT парковки вычисляется таким образом, что задняя правая часть V21 транспортного средства, которая находится ближе всего к стене W, относится к первой области VA. Это позволяет оператору парковаться посредством дистанционной операции, наблюдая за участком, на который следует обратить внимание в соответствии с позиционным соотношением между транспортным средством V и препятствием.
Когда транспортное средство V и препятствие приближаются друг к другу, позиция транспортного средства V делается наблюдаемой путем установки маршрута RT парковки (занятой области во время парковки) таким образом, что часть транспортного средства V существует в первой области VA. Это позволяет транспортному средству V и препятствию приблизиться друг к другу. Ситуация, в которой маршрут RT парковки не может быть вычислен из–за приближения к препятствию, предотвращается, тем самым увеличивая возможность выполнения процесса управления парковкой для транспортного средства V.
[0055]
Когда часть маршрута парковки принадлежит второй области, устройство 10 управления устанавливает маршрут RT парковки таким образом, чтобы часть маршрута парковки находилась в первой области. В этом случае вторая целевая скорость при перемещении по маршруту RT2 парковки, принадлежащему второй области BA, устанавливается ниже, чем первая целевая скорость при перемещении по маршруту RT1 парковки, принадлежащему первой области VA.
Как показано на фиг. 16, когда на этапе 301 определено, что маршрут парковки принадлежит второй области BA, процесс переходит к этапу 302, чтобы дополнительно определить, может ли быть установлен маршрут парковки в первой области VA. Когда весь маршрут парковки может быть установлен в первой области VA, маршрут парковки вычисляется на этапе 303. Когда часть маршрута парковки принадлежит второй области BA, целевая скорость на маршруте парковки, принадлежащем второй области, изменяется относительно низко.
Как показано на фиг. 17, когда часть маршрута парковки принадлежит второй области BA, а другая часть принадлежит первой области VA, целевая скорость транспортного средства V при перемещении по маршруту RT2 парковки (обозначенная сплошной линией), принадлежащем второй области BA, ниже целевой скорости транспортного средства V при перемещении по маршруту RT1 парковки (указанному пунктирной линией), принадлежащему первой области VA. Во второй области BA, которую нельзя увидеть визуальным распознаванием, скорость транспортного средства V снижается, и поэтому оператор может внимательно наблюдать за движением транспортного средства V.
[0056]
Когда угол между направлением транспортного средства V относительно позиции наблюдения и направлением, по меньшей мере, части маршрута RT парковки меньше предварительно определенного угла, устройство 10 управления может изменять позицию поворота для парковки TP, тем самым изменять направление маршрута TP парковки. Направление маршрута RT парковки изменяется путем смещения позиции поворота для парковки в сторону ниже по движению (сторона направления движения).
Как показано на фиг. 18, на этапе 401 выполняется определение, является ли угол между направлением транспортного средства V относительно позиции наблюдения и направлением, по меньшей мере, части маршрута RT парковки меньше предварительно определенного угла. За положительным определением следует этап 402, на котором делается определение относительно того, может ли быть изменена позиция поворота для парковки TP. Когда позиция поворота для парковки может быть изменена, процесс переходит к этапу 403 для вычисления маршрута парковки на основе измененной позиции поворота для парковки. Когда позиция поворота для парковки не может быть изменена из–за помех другим препятствиям и т.д., процесс переходит к этапу 404, чтобы уменьшить целевую скорость на маршруте парковки, имеющем угол меньше заданного угла с направлением, соединяющим позицию наблюдения (оператор М или операционный терминал 5) и транспортное средство V.
ФИГ. 19А иллюстрирует случай, в котором угол между направлением транспортного средства V относительно позиции наблюдения и направлением, по меньшей мере, части маршрута RT парковки меньше предварительно определенного угла. Как показано на фиг. 19A, в таком случае вторая область BA (слепая зона) формируется благодаря транспортному средству V, подлежащему управлению. Устройство 10 управления сдвигает позицию поворота для парковки TP1 в позицию поворота для парковки TP2 ниже по движению в направлении движения, то есть на дальнюю сторону спрятанной части, образованной ввиду стены W на чертеже. Посредством этой операции, угол маршрута RT парковки может быть изменен. Угол между направлением транспортного средства V относительно позиции наблюдения, показанной на фиг. 19B, и направление маршрута RT2 парковки относительно больше, чем на фиг. 19А; следовательно, время, в течение которого вторая область BA обуславливается транспортным средством V, сокращается, и площадь второй области BA также уменьшается.
Направление движения транспортного средства V и направление прямой видимости оператора могут быть смещены друг от друга путем изменения позиции поворота для парковки, и, таким образом, можно предотвратить возникновение второй области BA, обусловленной транспортным средством V, подлежащим управлению.
[0057]
Когда угол между направлением транспортного средства V относительно позиции наблюдения и направлением, по меньшей мере, части маршрута RT парковки меньше предварительно определенного угла, устройство 10 управления может изменять угол/кривизну маршрута RT парковки, тем самым изменять направление маршрута RT парковки.
Как показано на фиг. 20, на этапе 501 выполняется определение того, является ли угол между направлением транспортного средства V относительно позиции наблюдения и направлением, по меньшей мере, части маршрута RT парковки меньше предварительно определенного угла. За положительным определением следует этап 502, на котором выполняется определение того, может ли быть изменено направление маршрута RT парковки. Когда направление маршрута RT парковки может быть изменено, процесс переходит к этапу 503 для вычисления маршрута парковки на основе измененного угла/кривизны. Даже когда вычисляется новый маршрут RT парковки, может оставаться участок, в котором угол между направлением транспортного средства V относительно позиции наблюдения и направлением, по меньшей мере, части маршрута RT парковки меньше предварительно определенного угла. В этом случае процесс переходит к этапу 504, чтобы уменьшить целевую скорость на маршруте парковки, имеющем угол меньше предварительно определенного угла с направлением, соединяющим оператора M и транспортное средство V. Также на этапе 502, когда угол/кривизна маршрута парковки не может быть изменен из–за помех другим препятствиям и т. д., процесс переходит к этапу 504, чтобы уменьшить целевую скорость на маршруте парковки, имеющем угол меньше предварительно определенного угла с направлением, соединяющим оператора М и транспортное средство V.
[0058]
ФИГ. 21А иллюстрирует случай, когда существует область Q1, в которой угол между направлением транспортного средства V относительно позиции наблюдения и направлением, по меньшей мере, части маршрута RT парковки меньше предварительно определенного угла. Как описано ранее, в таком случае вторая область BA (слепая зона) формируется благодаря транспортному средству V, подлежащему управлению. Как показано на фиг. 21B, кривизна маршрута RT2 парковки, таким образом, изменяется, чтобы увеличить угол между направлением транспортного средства V относительно позиции наблюдения и направлением маршрута RT2 парковки, и время, в течение которого обуславливается вторая область BA из–за транспортного средства V (время для прохождения через область Q1, показанную на фиг. 21A), таким образом, сокращается.
Направление перемещения транспортного средства V и направление прямой видимости оператора могут быть смещены друг от друга путем изменения угла/кривизны маршрута RT парковки, и, таким образом, можно предотвратить возникновение второй области BA из–за транспортного средства V, подлежащего управлению.
На этапе 504 по фиг. 20 целевая скорость на маршруте RT парковки, имеющем угол меньше предварительно определенного угла с направлением, соединяющим позицию наблюдения и транспортное средство V, снижается. Это может снизить целевую скорость на маршруте RT парковки, включенном во вторую область, обусловленную транспортным средством V. Как показано на фиг. 21C, целевая скорость на маршруте RT3 парковки, включенном во вторую область BA, может быть снижена. Как будет понятно, тот же процесс выполняется, когда маршрут RT парковки не может быть обновлен («Нет» на этапе 502). Во второй области BA, которую нельзя увидеть визуальным распознаванием, скорость транспортного средства V снижается, и поэтому оператор может внимательно наблюдать за перемещением транспортного средства V.
[0059]
Когда область второй области, ненаблюдаемой из первой позиции наблюдения, которая установлена на основе позиции оператора М, больше, чем область второй области, ненаблюдаемой со второй позиции наблюдения, отличной от первой позиции наблюдения, устройство 10 управления передает вторую позицию наблюдения на операционный терминал 5.
Для перемещения позиции оператора M, таким образом, представляется новая вторая рабочая позиция, чтобы побуждать оператора M перемещаться. В качестве альтернативы, Команда для изменения позиции наблюдения может быть дана оператору М через операционный терминал 5.
На этапе 601 по фиг. 22, когда область второй области, вычисленная в первой позиции наблюдения, больше, чем область второй области, вычисленная во второй позиции наблюдения, процесс переходит к этапу 602, на котором устройство 10 управления изменяет позицию наблюдения. Область второй области BA’, которая вычисляется на основе второй позиции 51’ наблюдения, показанной на фиг. 23B, и которая не может быть визуально распознана оператором M из–за препятствия (стены W) меньше, чем область второй области BA, которая вычисляется на основе первой позиции 51 наблюдения, показанной на фиг. 23А, и которая не может быть визуально распознана оператором М из–за препятствия (стены W). В таком случае позиция оператора М, служащего в качестве ориентира позиции наблюдения, изменяется. Информация для запроса оператора М на перемещение предоставляется через операционный терминал 5, потому что операционный терминал 5 переносится оператором М. Например, как показано на фиг. 23C, представлена новая вторая рабочая позиция, чтобы побудить оператора M перемещаться. Это может уменьшить ненаблюдаемую вторую область, и транспортное средство V может быть припарковано вдоль маршрута парковки, который оператор М может легко воспринимать.
[0060]
На этапе 108 устройство 10 управления генерирует команду управления для перемещения транспортного средства V по вычисленному маршруту парковки. Устройство 10 управления предварительно хранит информацию о технических характеристиках транспортного средства, необходимую для команды управления. Примеры команды управления включают в себя команды по величине рулевого управления, скорости рулевого управления, ускорению рулевого управления, позиции переключения передачи, скорости (включая ноль), ускорению и замедлению транспортного средства, которые связаны с временем или позицией, когда транспортное средство перемещается вдоль маршрута парковки, и другие рабочие команды. Команда относительно маршрута парковки и рабочая команда, связанная с маршрутом парковки, выполняются транспортным средством, и транспортное средство, таким образом, может перемещаться (парковаться) в целевое парковочное пространство.
[0061]
Обращаясь снова к фиг. 5, будет описан процесс после этапа 109. Аппаратура 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения функционирует для выполнения процесса управления парковкой посредством дистанционного управления посредством передачи целевой команды установки парковочного пространства, команды запуска процесса управления парковкой, команды прерывания/отмены парковки и других соответствующих команд от внешнего объекта к транспортному средству V1, не требуя, чтобы оператор сел на транспортное средство V1. На этапе 109 устройство 10 управления управляет дисплеем 53 операционного терминала 5 для представления маршрута парковки. На этапе 110, когда оператор подтверждает маршрут парковки и вводит команду выполнения, процесс переходит к этапу 111. Операционный терминал 5 передает команду выполнения, введенную оператором, в аппаратуру 100 управления парковкой транспортного средства V. Аппаратура 100 управления парковкой транспортного средства V начинает управление парковкой.
[0062]
На этапе 112 устройство 10 управления периодически вычисляет первую область (и/или вторую область). Первая область, распознаваемая с позиции наблюдения, и вторая область, не распознаваемая с позиции наблюдения, изменяются в соответствии с изменениями в позиции препятствия и в позиции транспортного средства V. Чтобы реагировать на изменение ситуации, устройство 10 управления вычисляет первую область (или вторую область) в предварительно определенном цикле. На этапе 113 устройство 10 управления определяет, есть ли изменение в первой области или во второй области. Когда есть изменение, маршрут парковки вычисляется снова, потому что позиционное соотношение между позицией маршрута парковки (включая позицию поворота для парковки) и второй областью также изменяется. Когда можно вычислить соответствующий новый маршрут парковки, используется новый маршрут парковки. Устройство 10 управления вычисляет команду управления для нового маршрута парковки. На этапе 114 устройство 10 управления обновляет маршрут парковки и команду управления, вычисленную на этапе 108, для нового маршрута парковки и команды управления, соответствующих первой области или второй области, которая изменилась со временем. Когда нет никаких изменений в первой области или второй области на этапе 113, нет необходимости вычислять новый маршрут парковки и рабочую команду, и процесс переходит к этапу 115.
[0063]
На этапе 115 устройство 10 управления контролирует изменения в первой области и второй области, пока транспортное средство V не достигнет позиции поворота для парковки. Когда транспортное средство достигает позиции поворота для парковки, переключение передач, включенное в команду управления, выполняется на этапе 116. За этапом 116 следует этап 117, на котором управление парковкой завершается путем последовательного выполнения команд управления.
[0064]
Аппаратура 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения управляет работой системы 40 привода через контроллер 30 транспортного средства в соответствии с командой управления, так что транспортное средство V1 перемещается по маршруту парковки. Аппаратура 100 управления парковкой вычисляет командные сигналы для системы 40 привода транспортного средства V1, такого как электродвигатель EPS, возвращая выходное значение датчика 50 угла поворота рулевого устройства, так что траектория движения транспортного средства V1 совпадает с вычисленным маршрутом парковки, и передает командные сигналы в систему 40 привода или в контроллер 70 транспортного средства, который управляет системой 40 привода.
[0065]
Аппаратура 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения включает в себя блок управления парковкой. Блок управления парковкой получает информацию о диапазоне переключения передач от блока управления AT/CVT, информацию о скорости вращения колес от блока управления ABS, информацию о угле рулевого управления от блока управления углом рулевого управления, информацию о частоте вращения коленчатого вала двигателя от ECM и другую необходимую информацию. На ее основе блок управления парковкой вычисляет и выводит информацию о командах относительно автоматического или автономного рулевое управления в блок управления EPS, информацию о командах, такую как предупреждение для блока управления датчиком, и т. д. Устройство 10 управления получает элементы информации, которые получают датчиком 50 угла поворота рулевого устройства транспортного средства V1 и датчиком 60 скорости транспортного средства и другими датчиками транспортного средства через контроллер 70 транспортного средства.
[0066]
Система 40 привода в соответствии с одним или несколькими вариантами осуществления настоящего изобретения управляет транспортным средством V1 для перемещения (движения) из текущей позиции в целевое парковочное пространство путем вождения на основе сигналов команды управления, полученных от аппаратуры 100 управления парковкой. Рулевое устройства в соответствии с одним или несколькими вариантами осуществления настоящего изобретения представляет собой приводной механизм, который перемещает транспортное средство V в правом и левом направлениях. Электродвигатель EPS, включенный в систему 40 привода, приводит в действие механизм руления с усилителем руления рулевого устройства на основе сигналов команды управления, полученных от аппаратуры 100 управления парковкой, для управления количеством руления, и управляет работой при перемещении транспортного средства V1 до целевого парковочного пространства. Контент управления и схема работы для парковки транспортного средства V1 конкретно не ограничены, и любая схема, известная на момент подачи этой заявки, может быть соответствующим образом применена.
[0067]
Когда аппаратура 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения управляет транспортным средством V1 для перемещения к целевому парковочному пространству по маршруту, вычисленному на основе позиции транспортного средства V1 и позиции целевого парковочного пространства, акселератор и тормоз управляются в автоматическом или автономном режиме на основе конкретной скорости управления транспортным средством (установленной скорости транспортного средства), а работа рулевого устройства управляет движением транспортного средства в автоматическом или автономном режиме в соответствии со скоростью транспортного средства.
[0068]
Способ управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения используется в аппаратуре управления парковкой, как описано выше, и поэтому имеет следующие эффекты. Аппаратура 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения сконфигурирована и работает, как указано выше, и, следовательно, имеет следующие эффекты.
[0069]
(1) Способ управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения включает в себя вычисление первой области, наблюдаемой оператором, и второй области, ненаблюдаемой из позиции наблюдения, на основе позиционного соотношения между позицией препятствия и позицией оператора, и вычисление маршрута парковки и команды управления для перемещения по маршруту парковки, так что первый уровень близости транспортного средства к препятствию в первой области выше, чем второй уровень близости транспортного средства к препятствию во второй области.
В одном или нескольких вариантах осуществления настоящего изобретения первый уровень близости в первой области, наблюдаемой с позиции наблюдения оператора, устанавливается выше, чем второй уровень близости во второй области, не наблюдаемой с позиции наблюдения наблюдателя. В области, наблюдаемой оператором M, транспортному средству и препятствию разрешено приближаться друг к другу, в отличие от области, не наблюдаемой оператором M. Таким образом, уровень близости между транспортным средством и препятствием можно регулировать в соответствии с ситуацией наблюдения оператора М.
В первой области, наблюдаемой оператором, транспортное средство перемещается, приближаясь к препятствию ближе, чем во второй области; следовательно, даже если препятствие существует, управление парковкой может быть продолжено. Процесс управления парковкой не прерывается кроме как из–за существования препятствия, поскольку в зависимости от ситуации транспортному средству и препятствию разрешается приближаться друг к другу. В соответствии со способом управления парковкой в одном или нескольких вариантах осуществления настоящего изобретения первый уровень близости, применяемый в первой области, изменяется на значение, которое относительно выше, чем второй уровень близости, применяемый во второй области; следовательно, количество сцен, в которых процесс управления парковкой продолжается, увеличивается, и могут быть достигнуты как комфорт, так и удобство использования и безопасность.
[0070]
(2) В способе управления парковкой согласно одному или нескольким вариантам осуществления настоящего изобретения первый уровень близости представлен первым размером интервала, которое позволяет транспортному средству приблизиться к препятствию, а второй уровень близости представлен вторым размером интервала, которое позволяет транспортному средству приблизиться к препятствию. Маршрут парковки вычисляется таким образом, чтобы первый размер интервала был короче, чем второй размер интервала; следовательно, процесс управления парковкой может продолжаться, в то же время позволяя транспортному средству V и препятствию приближаться друг к другу в первой области VA.
[0071]
(3) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения первый уровень близости представлен первым расстоянием поворота между первой позицией поворота, принадлежащей первой области и препятствием, и второй уровень близости представлен вторым расстоянием поворота между второй позицией поворота, принадлежащей второй области, и препятствием. Маршрут парковки вычисляется таким образом, чтобы первое расстояние поворота было короче второго расстояния поворота; следовательно, процесс управления парковкой может быть продолжен, в то же время позволяя первой позиции поворота и препятствию приближаться относительно близко друг к другу в первой области VA.
[0072]
(4) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения первый уровень близости представлен первым расстоянием разнесения от препятствия до маршрута парковки, а второй уровень близости представлен вторым расстоянием разнесения от препятствия до парковки. Маршрут парковки вычисляется так, что первое расстояние разнесения меньше второго расстояния разнесения.
При вычислении маршрута парковки, условие состоит в том, что каждая точка на маршруте парковки разнесена от препятствия заранее определенным расстоянием. Первое расстояние разнесения, когда маршрут парковки существует в первой области, устанавливается короче, чем второе расстояние разнесения, когда маршрут парковки существует во второй области. Это позволяет маршруту парковки и препятствию приблизиться друг к другу ближе в первой области VA, чем во второй области BA, и процесс управления парковкой может быть продолжен.
[0073]
(5) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения первый уровень близости представлен первым временем начала замедления, при котором замедление начинается при приближении к препятствию, а второй уровень близости представлен временем начала замедления, при котором начинается замедление при приближении к препятствию. Команда управления генерируется таким образом, что первое время начала замедления является более поздним, чем второе время начала замедления. Посредством задания первого времени начала замедления позже второго времени начала замедления, время для прохождения через первую область может быть сокращено. В результате время, требуемое от начала парковки до завершения парковки, может быть сокращено.
[0074]
(6) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения первый уровень близости представлен первым расстоянием завершения замедления от препятствия до первой точки завершения замедления в первой области, и второй уровень близости представлен вторым расстоянием завершения замедления от препятствия до второй точки завершения замедления во второй области. Команда управления генерируется так, что первое расстояние завершения замедления короче, чем второе расстояние завершения замедления. Делая первое расстояние завершения замедления короче, чем второе расстояние завершения замедления, чтобы позволить транспортному средству приближаться как можно ближе к препятствию, транспортное средство может продолжать перемещаться в режиме управления парковкой.
[0075]
(7) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения первый уровень близости представлен первым замедлением при приближении к препятствию, а второй уровень близости представлен вторым замедлением при приближении к препятствию. Делая первое замедление выше, чем второе замедление, время для прохождения через первую область может быть сокращено. В результате время, требуемое от начала парковки до завершения парковки, может быть сокращено.
[0076]
(8) Команда управления в способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения включает в себя первое значение ограничения относительной скорости между транспортным средством, принадлежащим к первой области, и оператором, и второе значение ограничения относительной скорости между транспортным средством, принадлежащим ко второй области, и оператором, и команда управления генерируется так, что первое значение ограничения относительной скорости выше, чем второе значение ограничения относительной скорости. Делая первое значение ограничения относительной скорости выше второго значение ограничения относительной скорости, время прохождения через первую область может быть сокращено. В результате время, требуемое от начала парковки до завершения парковки, может быть сокращено.
[0077]
(9) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения маршрут RT парковки вычисляется так, что, по меньшей мере, часть транспортного средства V существует в первой области VA вдоль, по меньшей мере, части маршрута RT парковки транспортного средства. Устройство 10 управления вычисляет маршрут RT парковки так, чтобы часть транспортного средства V можно было видеть из позиции наблюдения, по меньшей мере, временно, пока транспортное средство V перемещается вдоль маршрута RT парковки. Это позволяет оператору подтверждать наличие и позицию транспортного средства V во время процесса управления парковкой. Можно избежать ситуации, в которой маршрут RT парковки вычисляется так, что оператор не может подтвердить наличие и позицию транспортного средства V в течение всего процесса управления парковкой.
[0078]
(10) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения маршрут RT парковки вычисляется так, что, по меньшей мере, часть транспортного средства V существует в первой области VA, когда оно находится в позиции поворота для парковки, которая включена в маршрут RT парковки. Даже когда позиция поворота для парковки принадлежит второй области (слепой зоне) вдоль маршрута RT парковки, которая вычисляется на основе предварительно установленного правила, маршрут RT парковки вычисляется так, что задняя левая часть V21, которая представляет собой, по меньшей мере, часть транспортного средства V, принадлежит первой области VA. По меньшей мере, часть транспортного средства V, существующего в наблюдаемой первой области VA, позволяет оператору выполнять операцию парковки при оценке позиции транспортного средства V. Если транспортное средство V вообще не видно, позиция транспортного средства V не может быть даже оценена, поэтому будет трудно продолжить работу парковки. Напротив, вышеупомянутая схема может гарантировать возможность выполнения операции парковки.
[0079]
(11) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения маршрут RT парковки вычисляется таким образом, что конкретная часть транспортного средства V существует в первой области VA. Устройство 10 управления вычисляет маршрут RT парковки так, что конкретная часть (например, часть бокового зеркала), для которой уделяется внимание контакту, принадлежит первой области VA. Это позволяет оператору парковаться посредством дистанционной операции, одновременно наблюдая за конкретной частью, на которую следует обратить внимание.
[0080]
(12) В способе управления парковкой согласно одному или нескольким вариантам осуществления настоящего изобретения конкретная часть, которая включена в первую область VA транспортного средства V, может быть предварительно определена в соответствии с формой парковки. Например, при выполнении парковки задним ходом, правая или левая задняя часть (угловая часть) определяется как конкретная часть. При выполнении парковки задним ходом, устройство 10 управления вычисляет маршрут RT парковки так, что правая или левая задняя часть принадлежит первой области VA. Это позволяет оператору парковаться посредством дистанционной операции, наблюдая за конкретной частью, на которую следует обратить внимание.
[0081]
(13) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, маршрут парковки вычисляется таким образом, чтобы, по меньшей мере, часть транспортного средства V существовала в первой области, когда расстояние между транспортным средством V и препятствием, обнаруженным вокруг транспортного средства, меньше заранее определенного значения. Это позволяет оператору парковаться посредством дистанционной операции, одновременно наблюдая за участком, на который следует обратить внимание в соответствии с позиционным соотношением между транспортным средством V и препятствием.
[0082]
(14) В способе управления парковкой согласно одному или нескольким вариантам осуществления настоящего изобретения, когда угол между направлением транспортного средства V относительно позиции оператора и направлением, по меньшей мере, части маршрута RT парковки меньше заданного угла, маршрут RT парковки изменяется. Направление перемещения транспортного средства V и направление прямой видимости оператора могут быть смещены друг от друга путем изменения позиции поворота для парковки или изменения наклона и/или кривизны маршрута RT парковки, и, таким образом, возможно предотвратить возникновение второй области BA из–за транспортного средства V, подлежащего управлению.
[0083]
(15) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, когда, по меньшей мере, часть маршрута RT парковки принадлежит второй области BA (слепая зона), маршрут RT парковки вычисляется так, что, по меньшей мере, часть транспортного средства V существует в первой области VA. Маршрут RT парковки корректируется, когда, по меньшей мере, часть маршрута RT парковки принадлежит второй области BA, и поэтому процесс управления парковкой может выполняться вдоль маршрута RT парковки, который оператор может легко наблюдать. При парковке с помощью дистанционного управления, оператор может легко подтвердить позицию и перемещение транспортного средства V. Маршрут RT парковки вычисляется таким образом, что левая задняя часть V21, которая является, по меньшей мере, частью транспортного средства V, принадлежит первой области VA. По меньшей мере, часть транспортного средства V, существующая в наблюдаемой первой области VA, позволяет оператору выполнять операцию парковки при оценке позиции транспортного средства V. Если транспортное средство V не видно вообще, позиция транспортного средства V даже не может быть оценена, так что будет трудно продолжить работу парковки. В отличие от этого, вышеупомянутая схема может гарантировать возможность выполнения операции парковки.
[0084]
(16) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, когда часть маршрута парковки принадлежит второй области BA, а другая часть принадлежит к первой области VA, целевая скорость транспортного средства V при движении по маршруту RT2 парковки (указано сплошной линией), принадлежащему ко второй области BA, ниже, чем целевая скорость транспортного средства V при перемещении по маршруту RT1 парковки (указано пунктирной линией), принадлежащему к первой области VA. Во второй области BA, которая не может наблюдаться посредством визуального распознавания, скорость транспортного средства V снижается, и оператор может поэтому внимательно наблюдать за движением транспортного средства V.
[0085]
(17) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, когда область второй области, ненаблюдаемой с первой позиции наблюдения, которая устанавливается на основе позиции оператора M, больше области второй области, ненаблюдаемой из второй позиции наблюдения, отличающейся от первой позиции наблюдения, вторая позиция наблюдения передается на операционный терминал 5. Вторая область, которая является ненаблюдаемой слепой зоной, может быть уменьшена, и транспортное средство V может быть припарковано вдоль маршрута парковки, который оператор может легко воспринимать.
[0086]
(18) В аппаратуре 100 управления парковкой, в которой выполняется способ в соответствии с одним или более вариантами осуществления настоящего изобретения, могут быть получены действия и эффекты, описанные в вышеуказанных параграфах с (1) по (17).
[0087]
Варианты осуществления, объясняемые выше, описаны для облегчения понимания настоящего изобретения и не описаны для ограничения настоящего изобретения. Следовательно предполагается, что элементы, раскрытые в вышеуказанных вариантах осуществления, включают в себя все изменения в конструкции и эквиваленты, подпадающие под объем технических сведений в настоящем изобретении.
[Описание ссылочных номеров]
[0088]
1000 Система управления парковкой
100 Аппаратура управления парковкой
10 Устройство управления
11 процессор
12 ROM
13 RAM
132 Устройство хранения
133 Информация карты
134 Информация о парковке
135 Информация о препятствии
20 Входное устройство
21 Устройство связи
211 Антенна
30 Выходное устройство
31 Дисплей
1a–1d Камеры
2 Дальномерные устройства
3 Информационный сервер
31 Устройство связи
32 Устройство хранения
33 Информация карты
34 Информация о парковке
35 Информация о препятствии
5 Операционный терминал
51 Устройство связи
511 Антенна
52 Входное устройство
53 Дисплей
200 Бортовое устройство
40 Система привода
50 Датчик угла поворота рулевого устройства
60 Датчик скорости транспортного средства
70 Контроллер транспортного средства
V Транспортное средство
VA Первая область
BA Вторая область.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2735340C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2736960C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2733300C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2740661C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И АППАРАТУРА УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2744447C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2730808C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2738780C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2740111C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И ОБОРУДОВАНИЕ УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2746684C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2742530C1 |
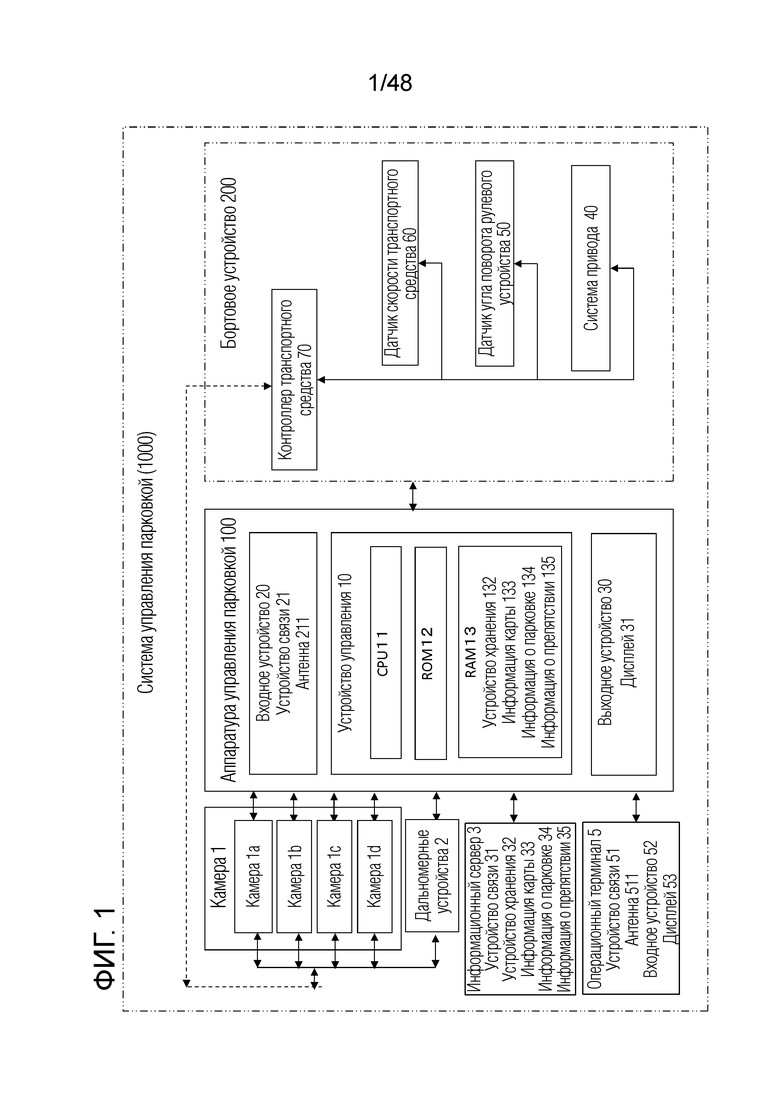

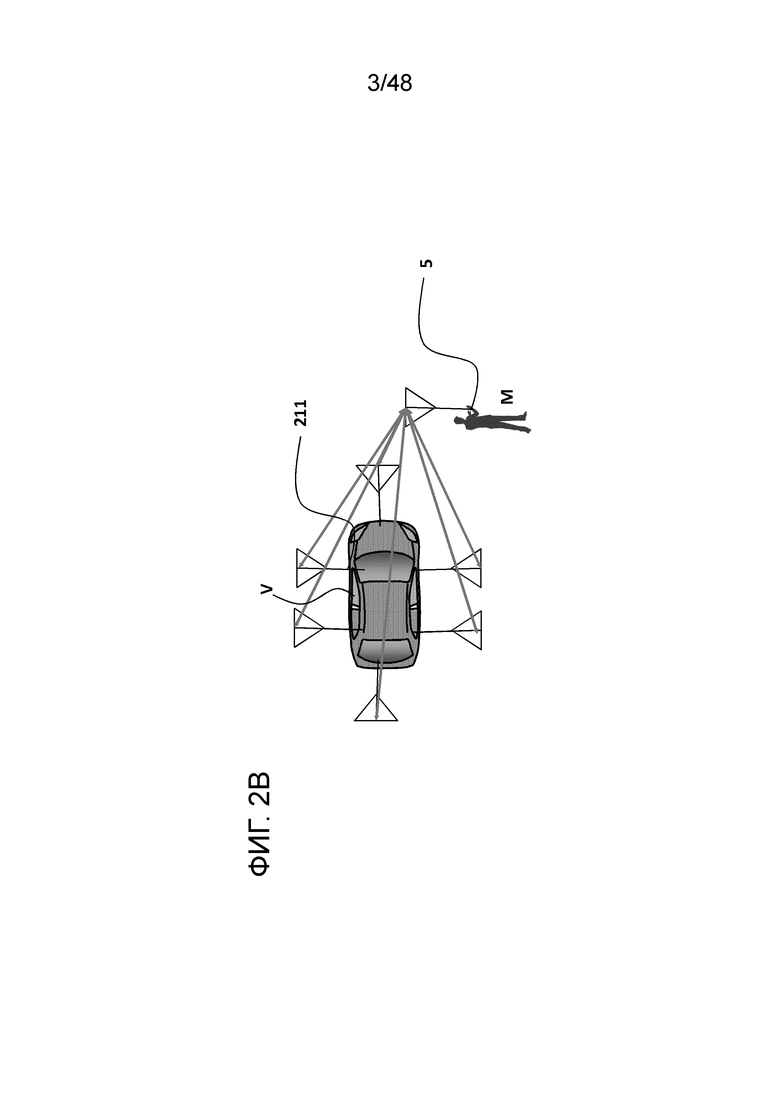
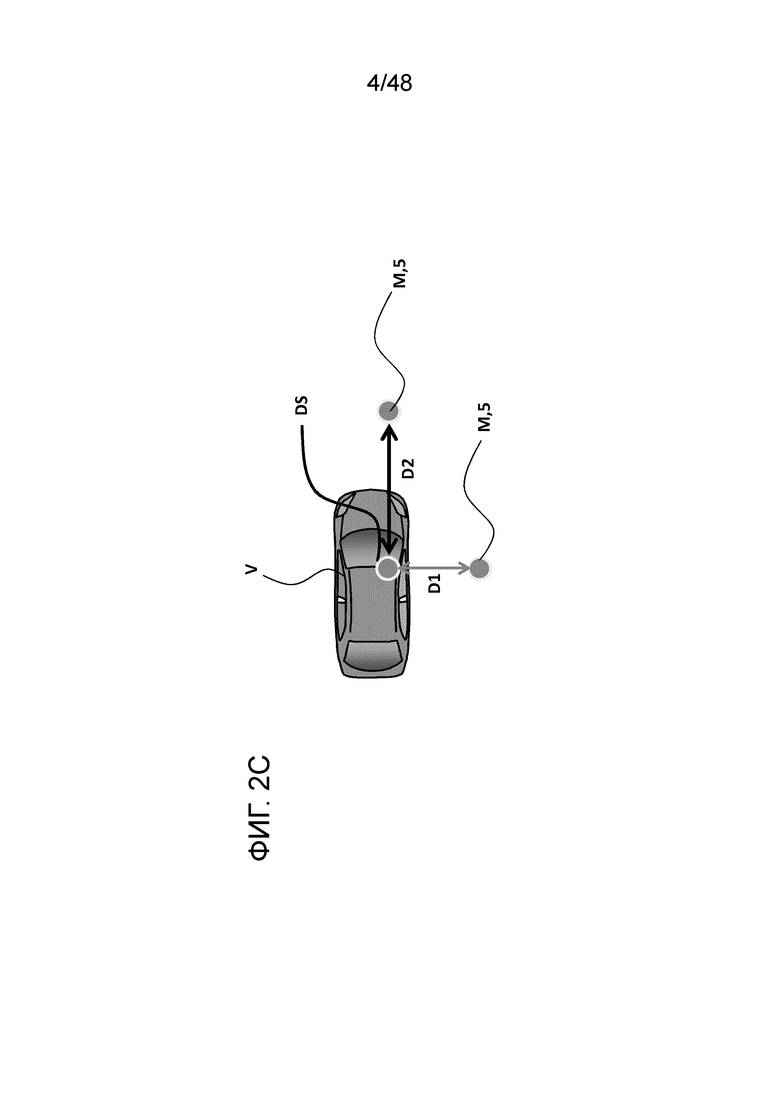

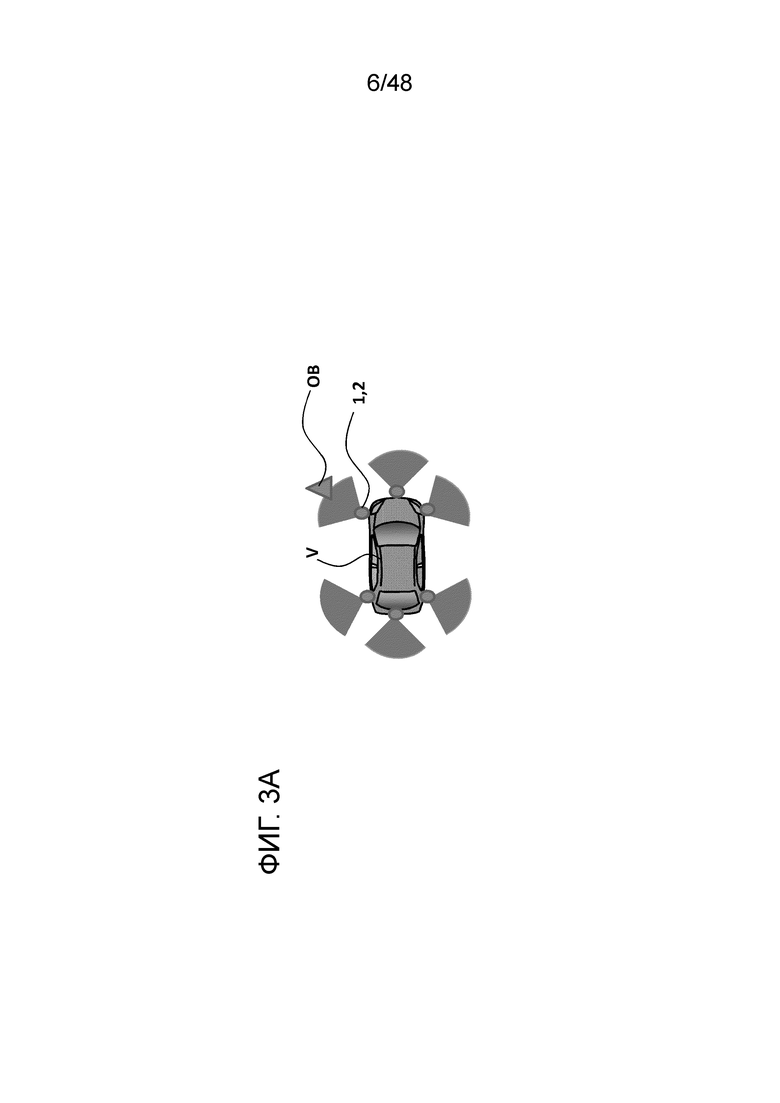
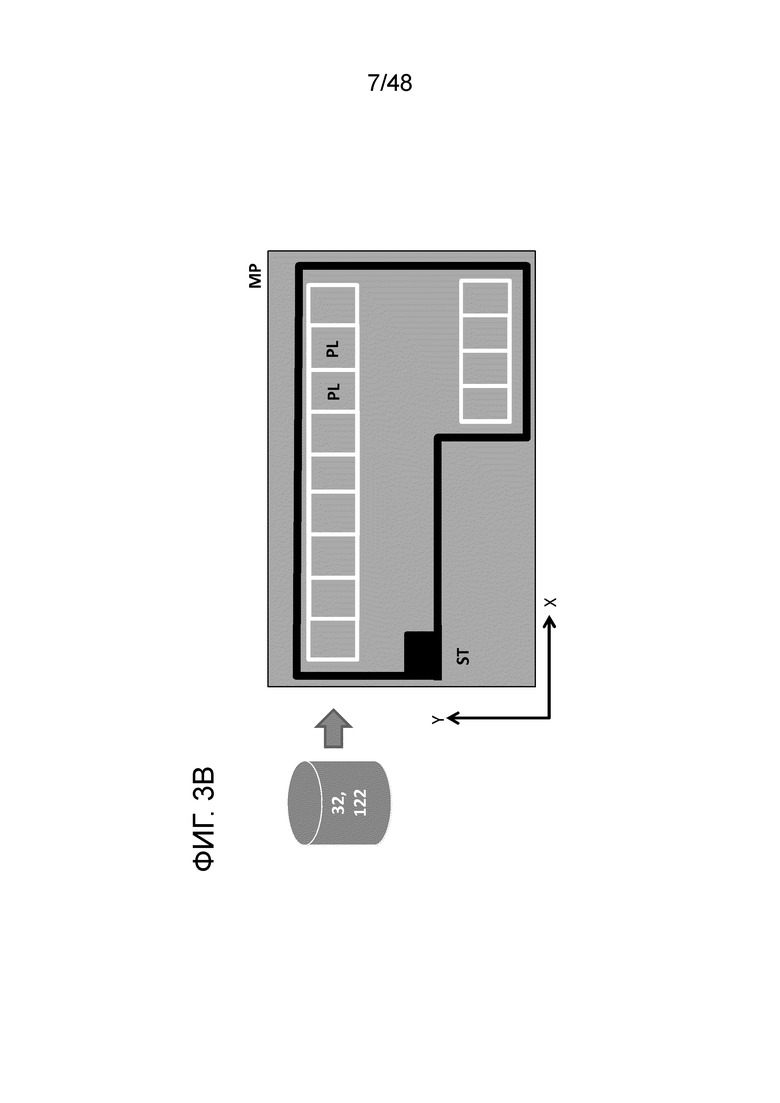
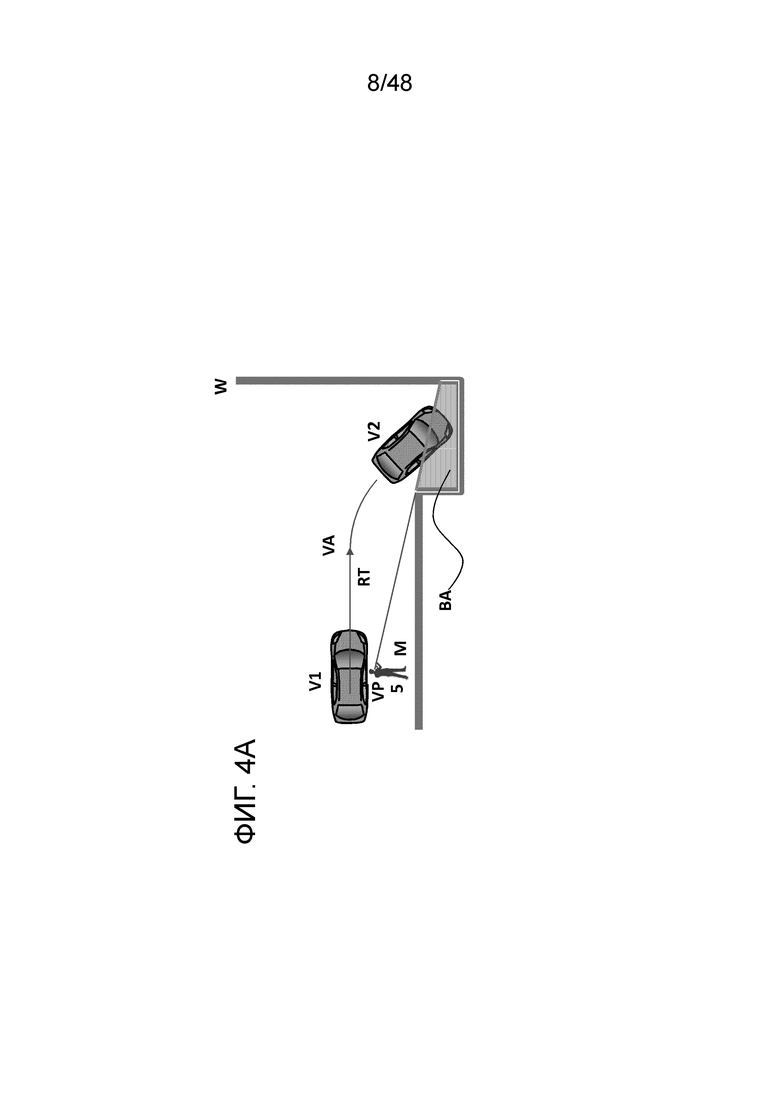
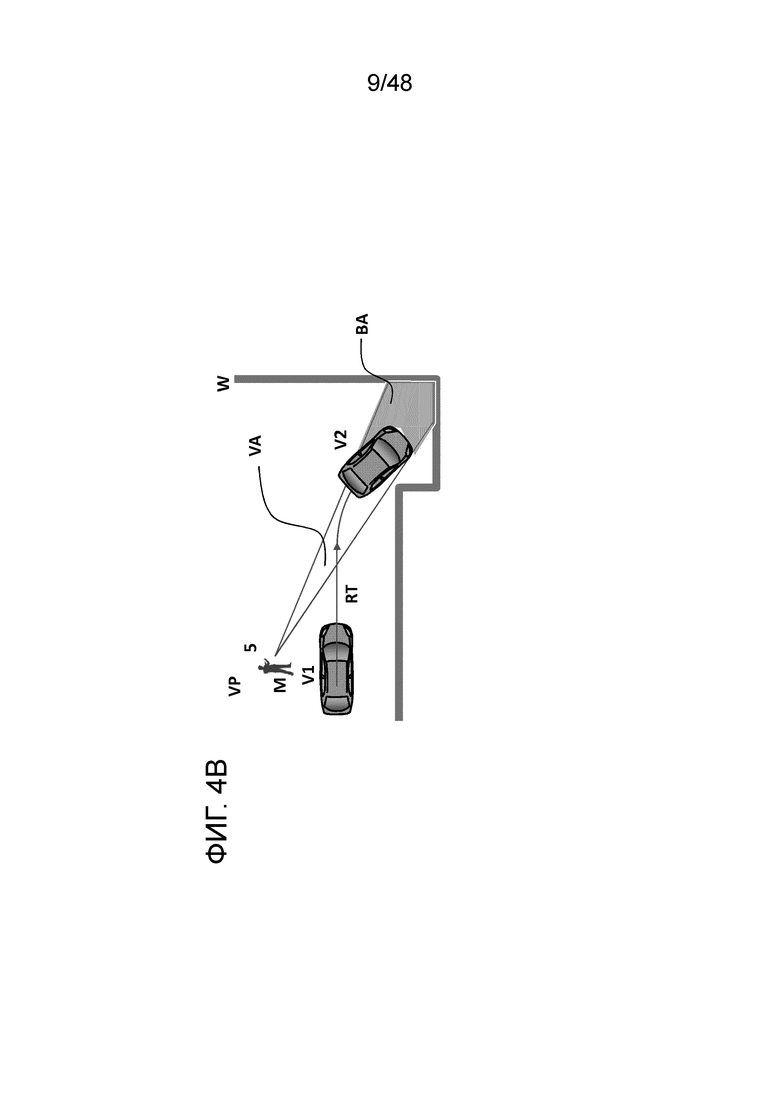
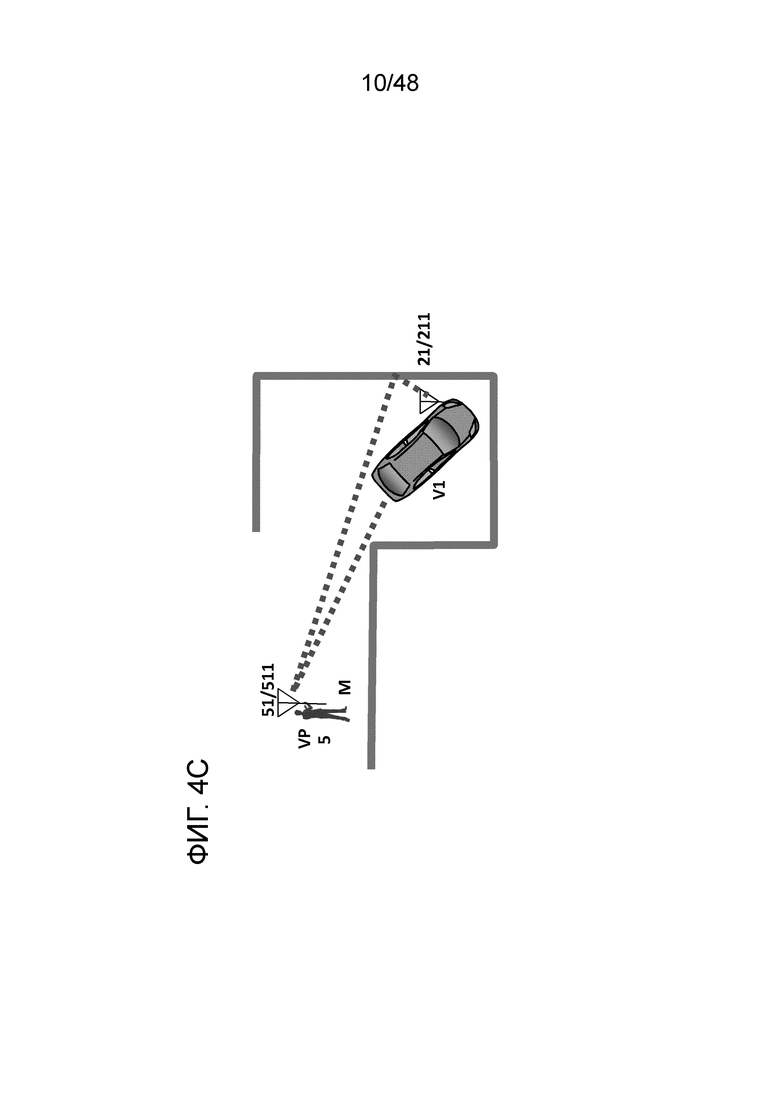
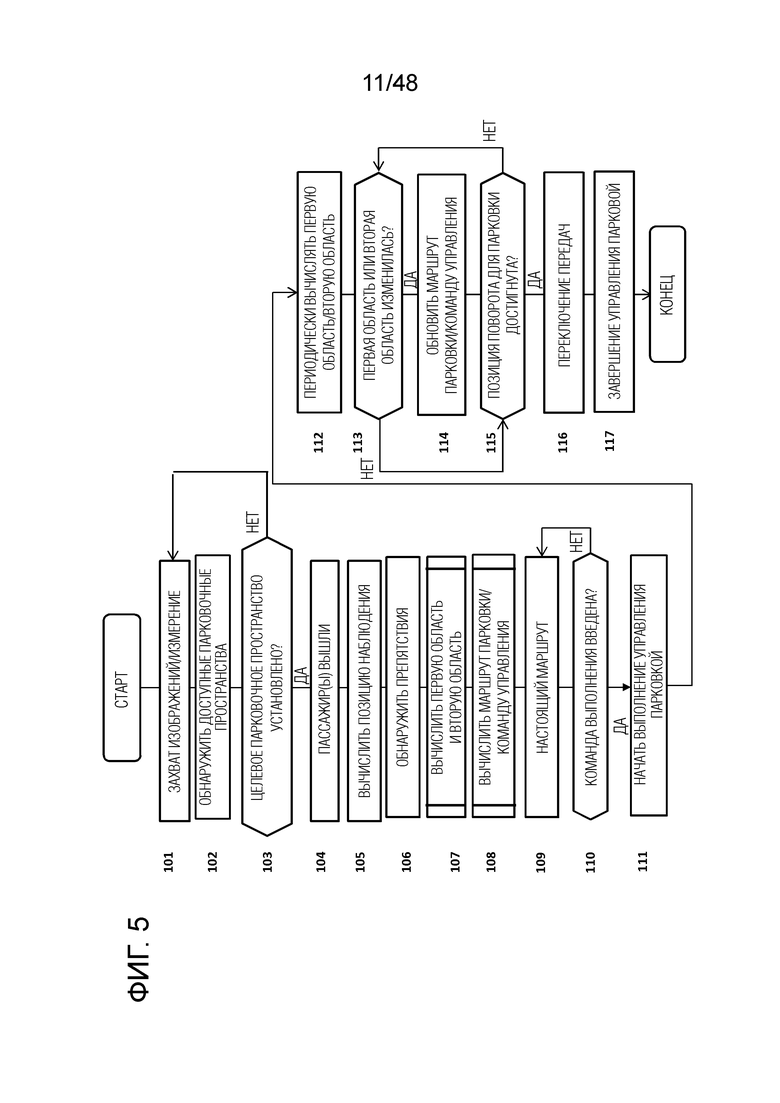
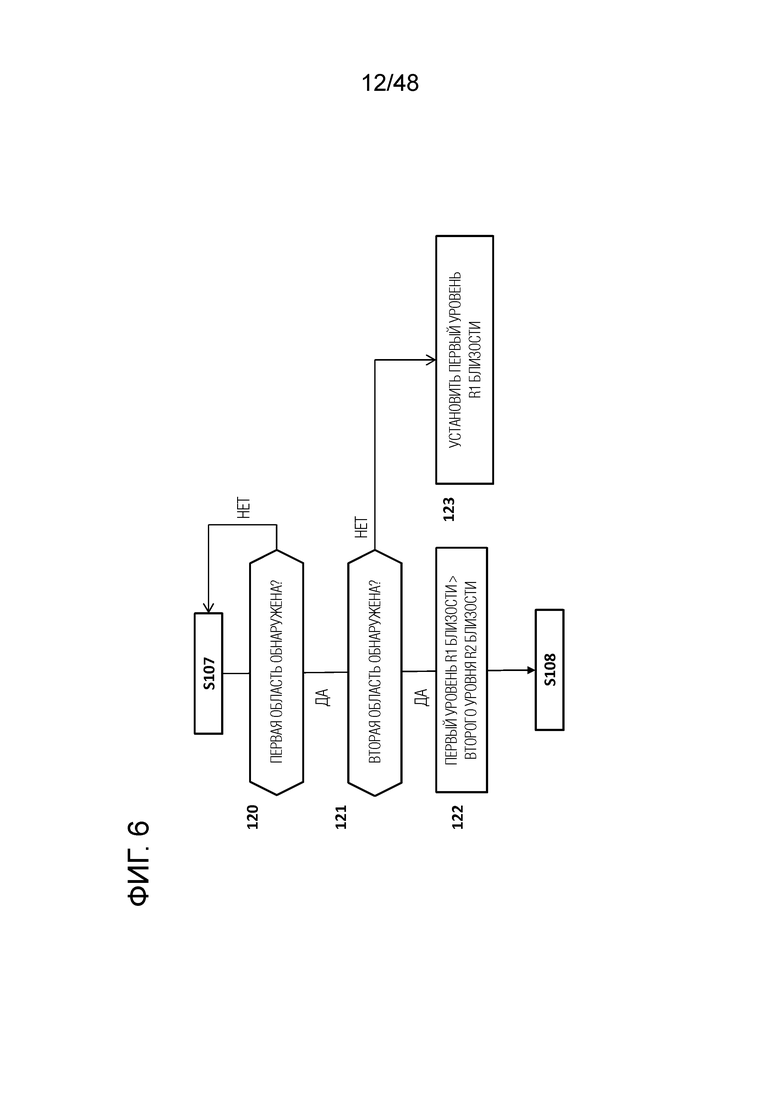
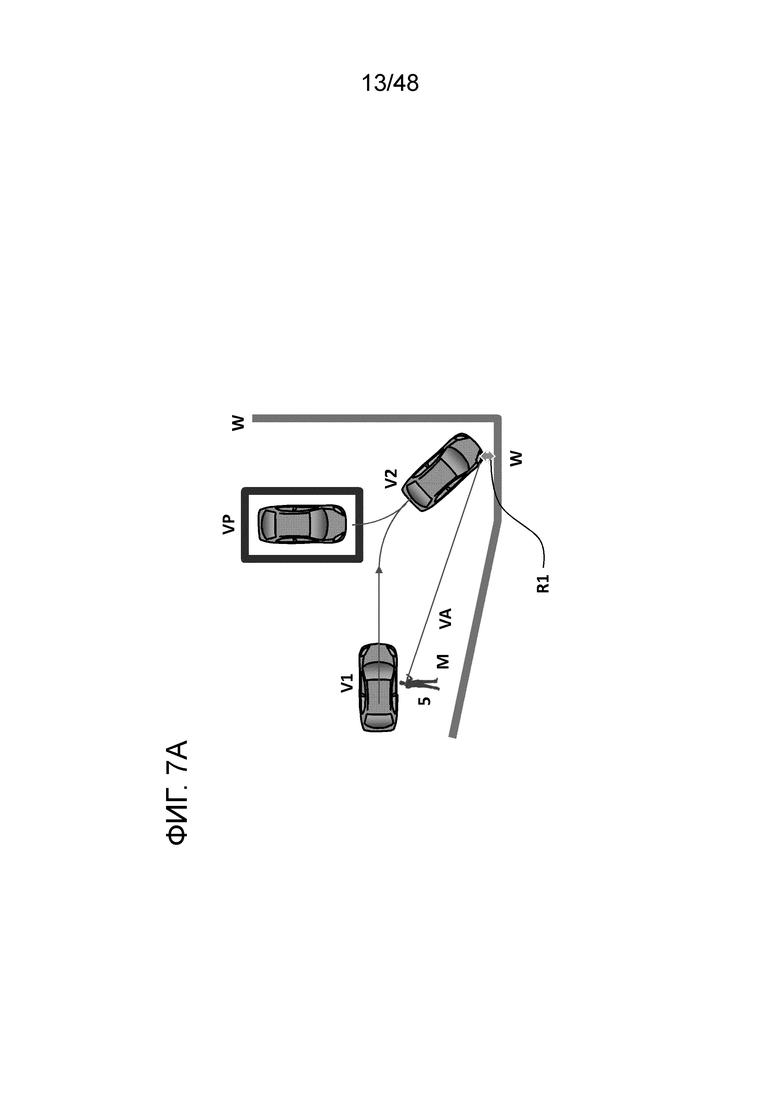
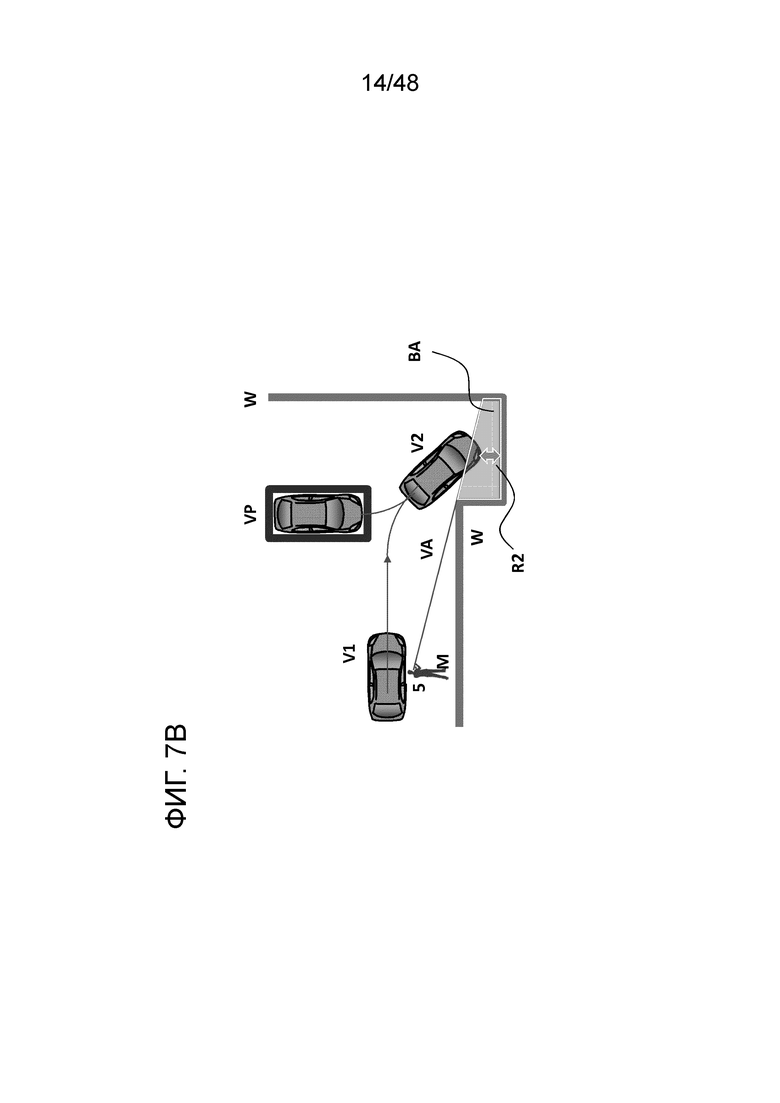
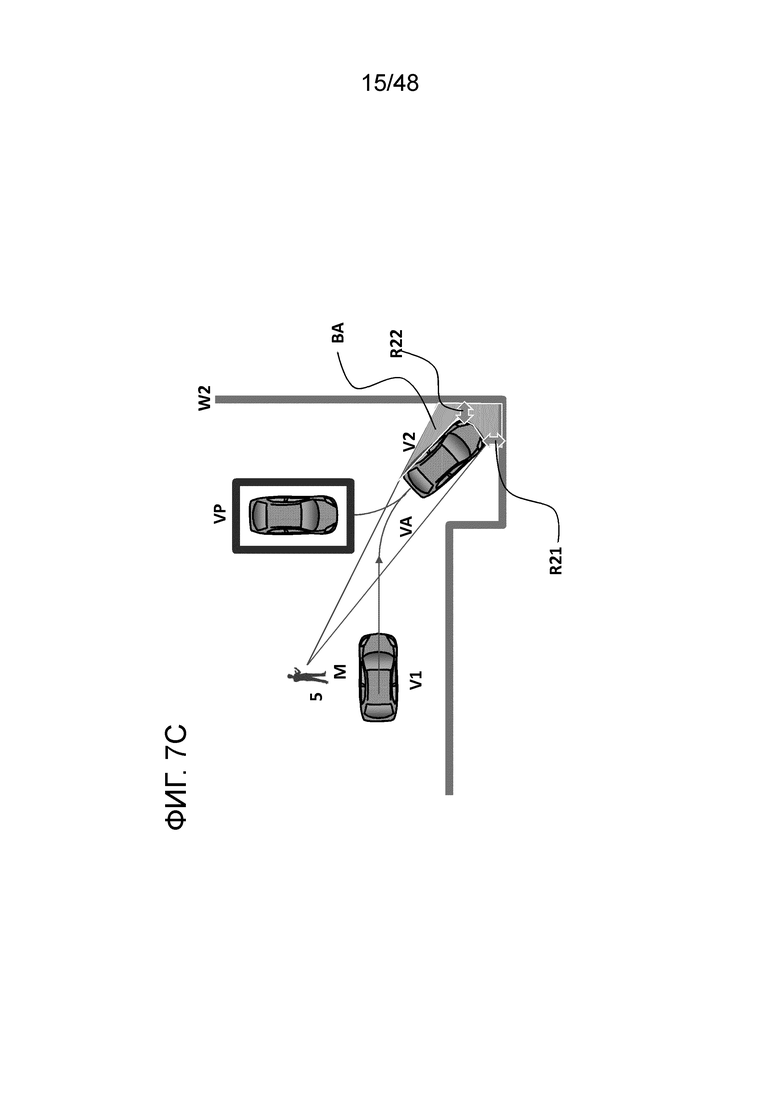

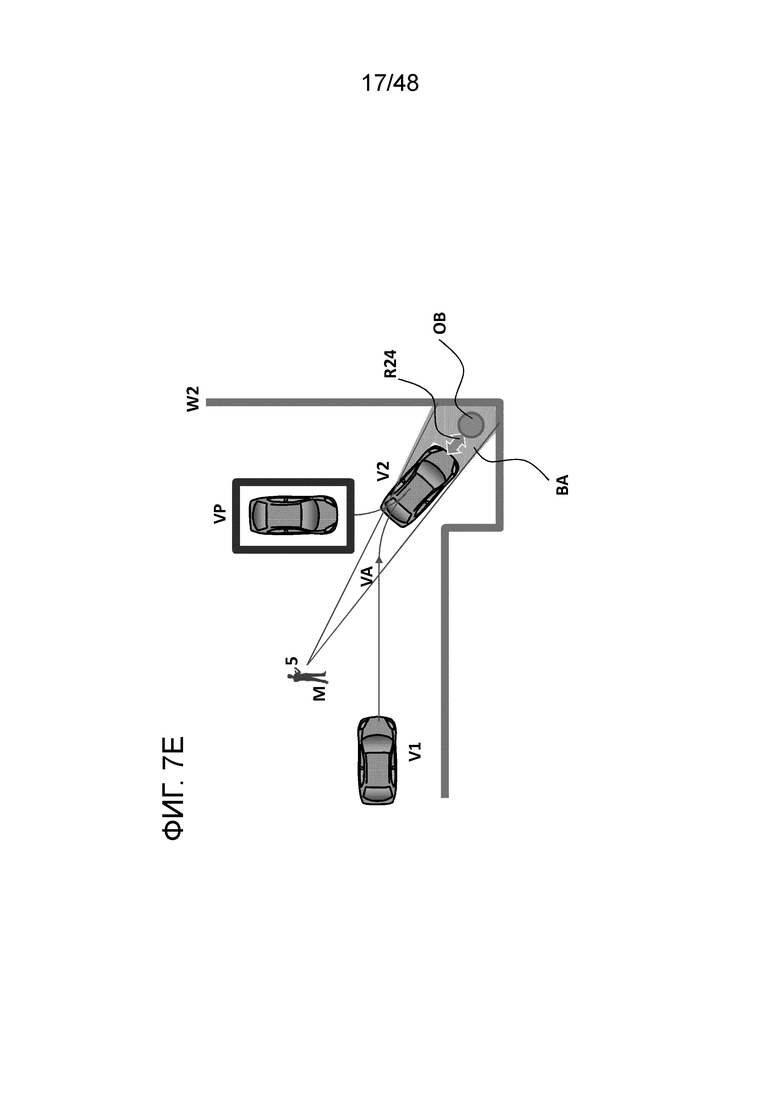


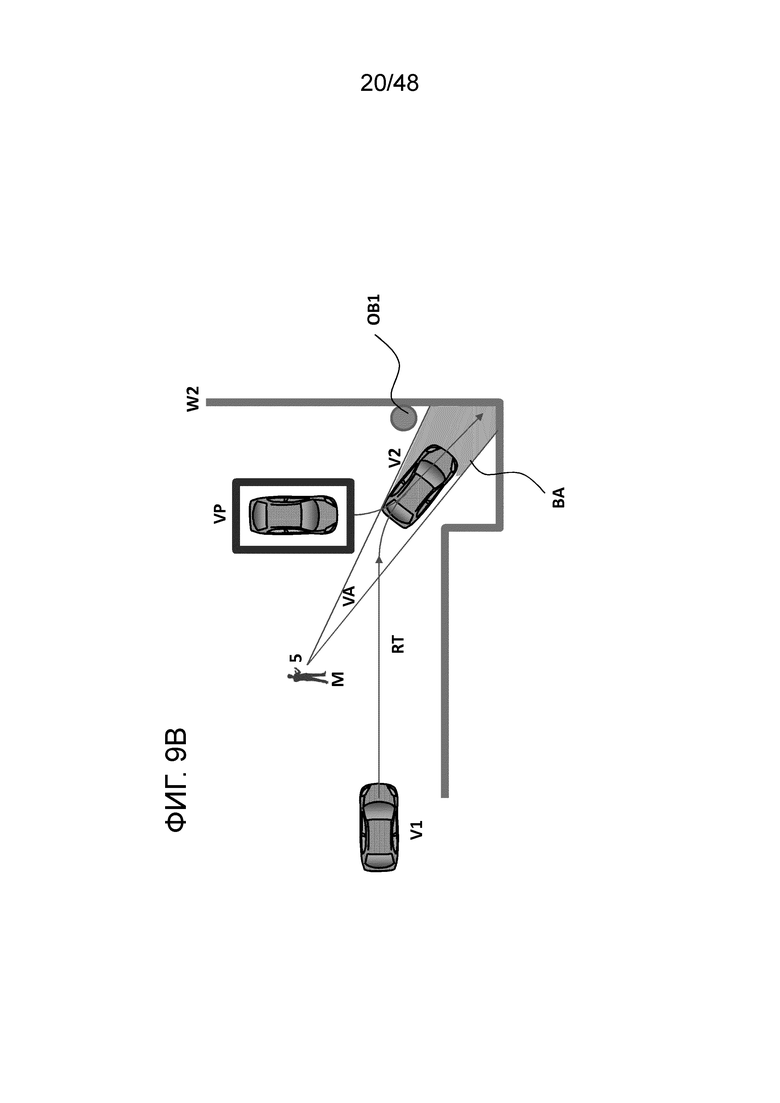
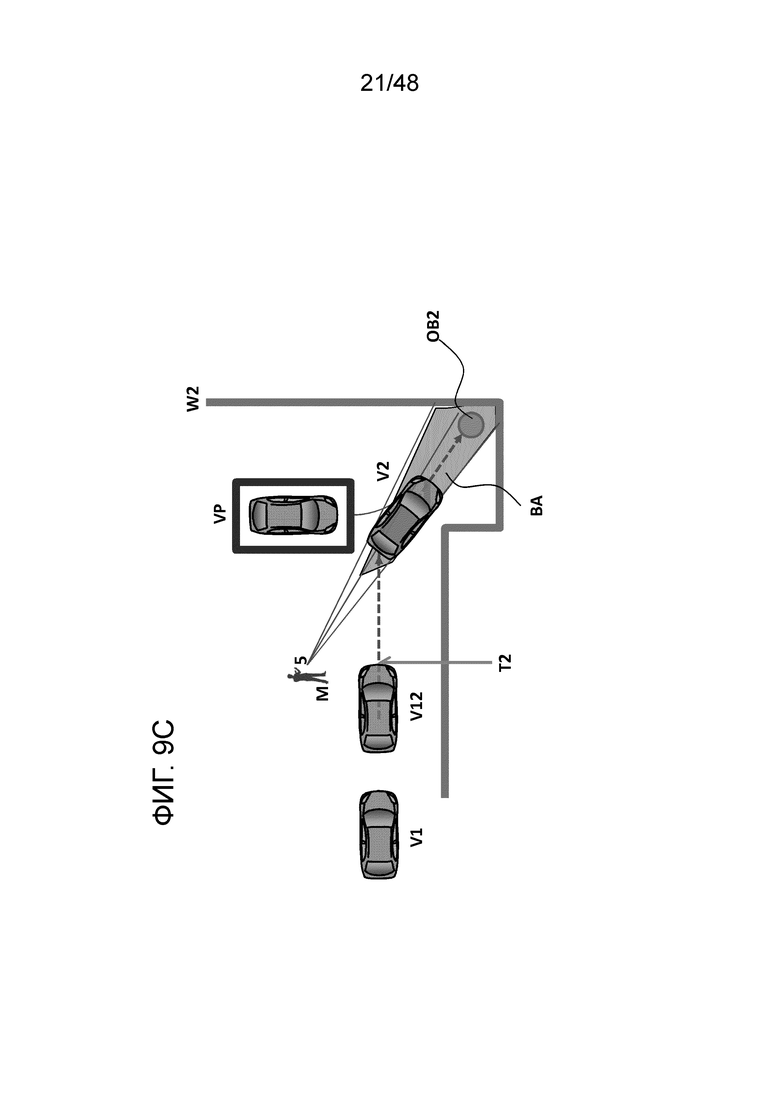

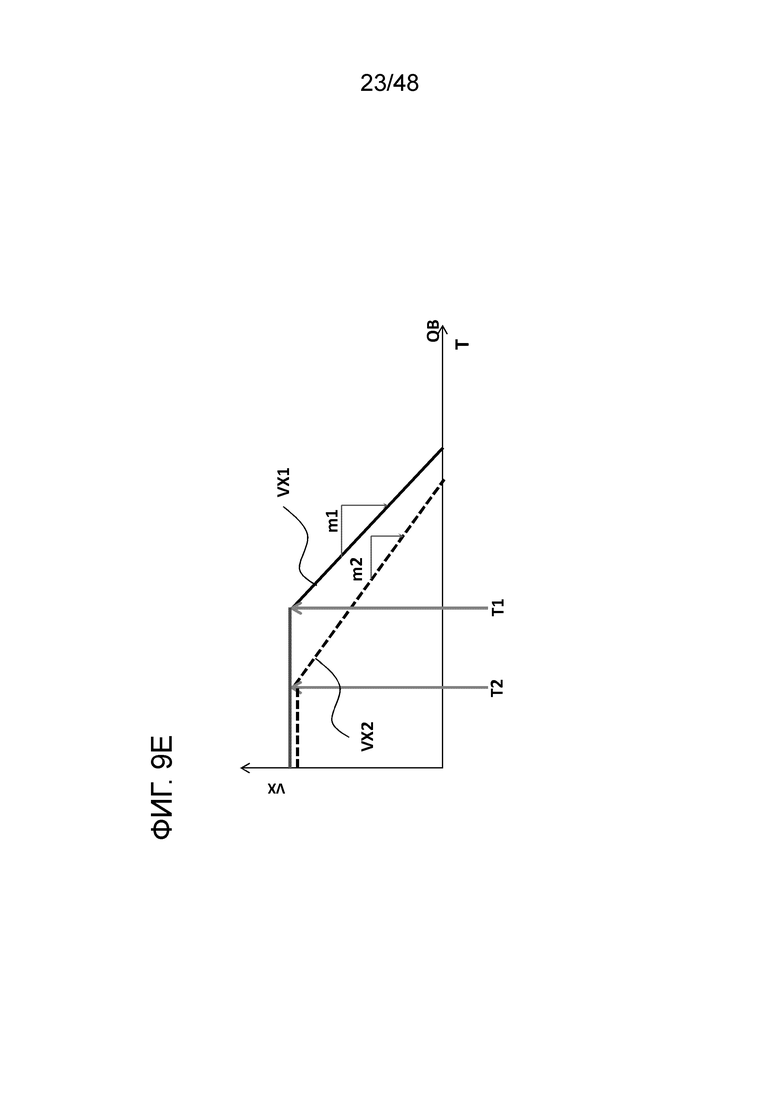
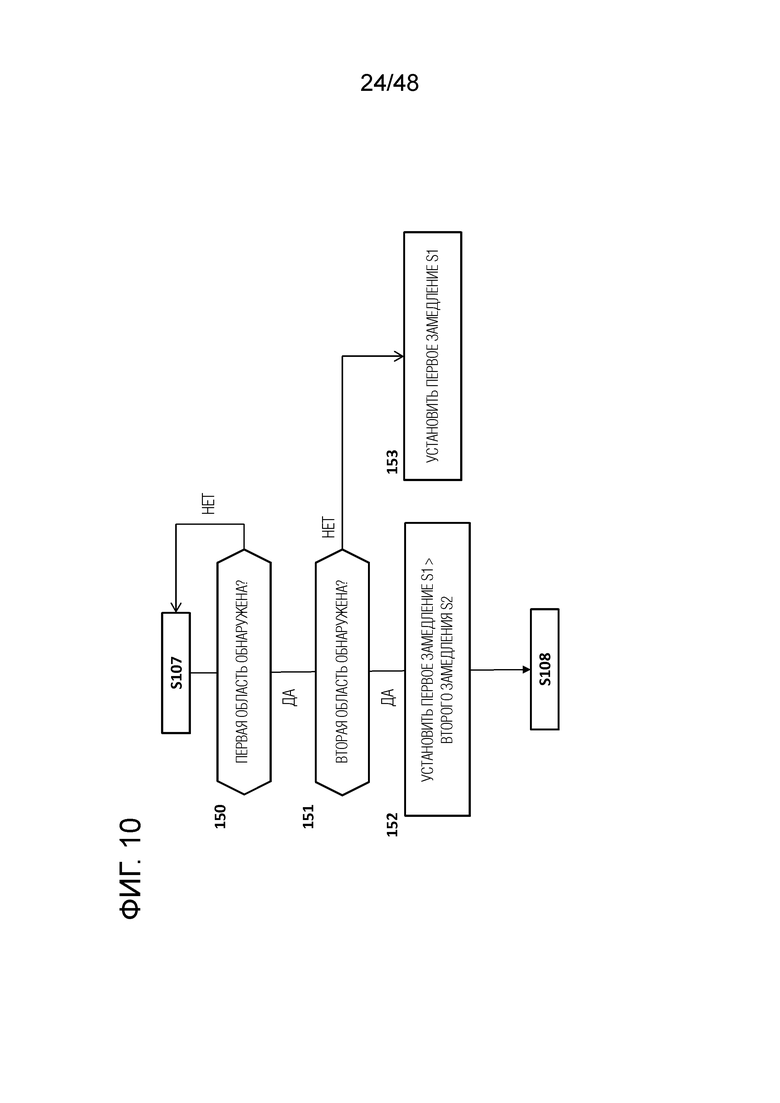

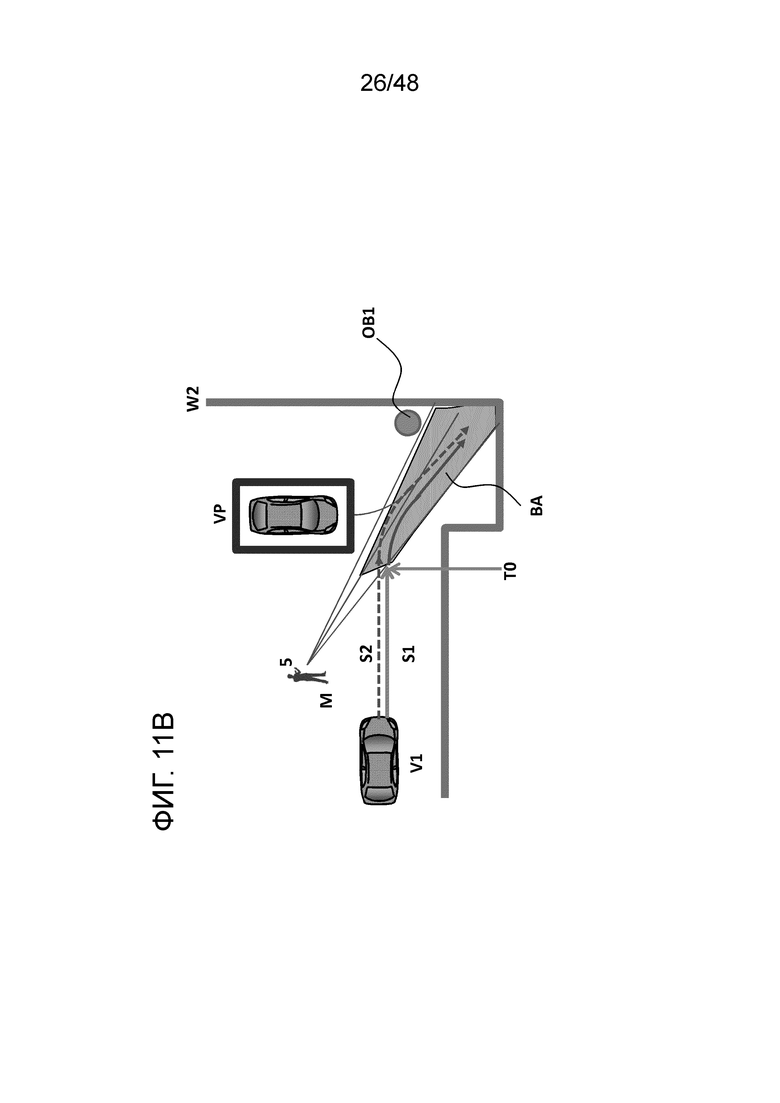
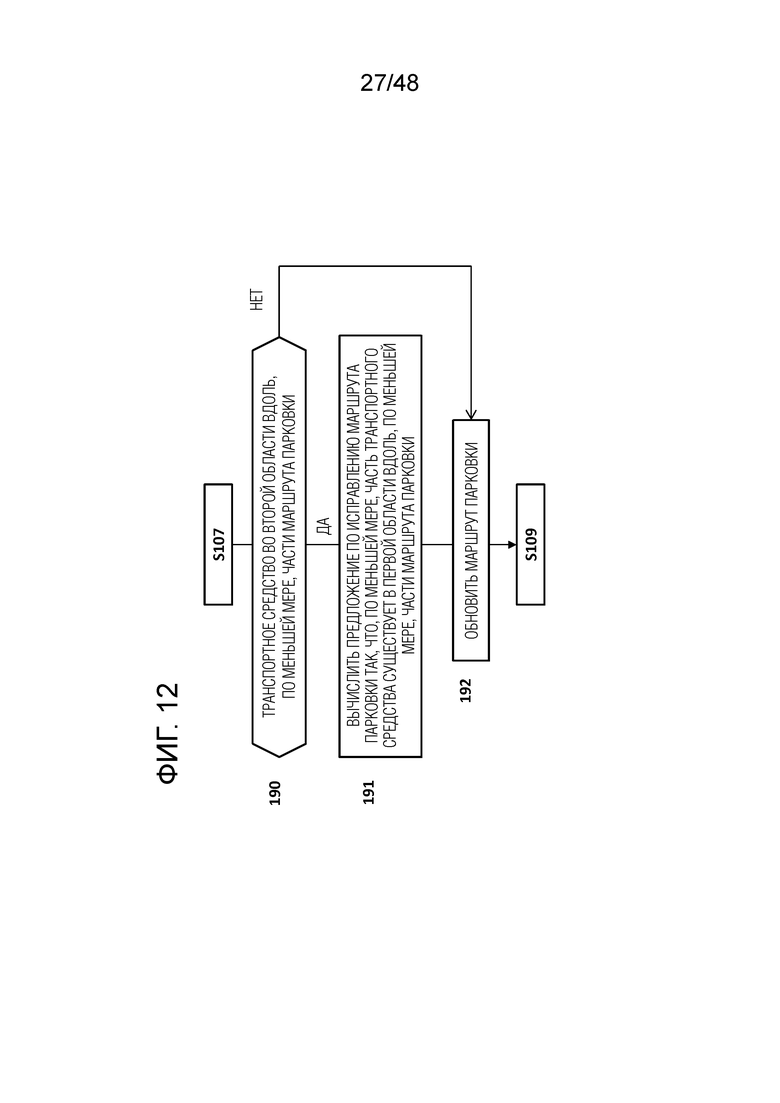
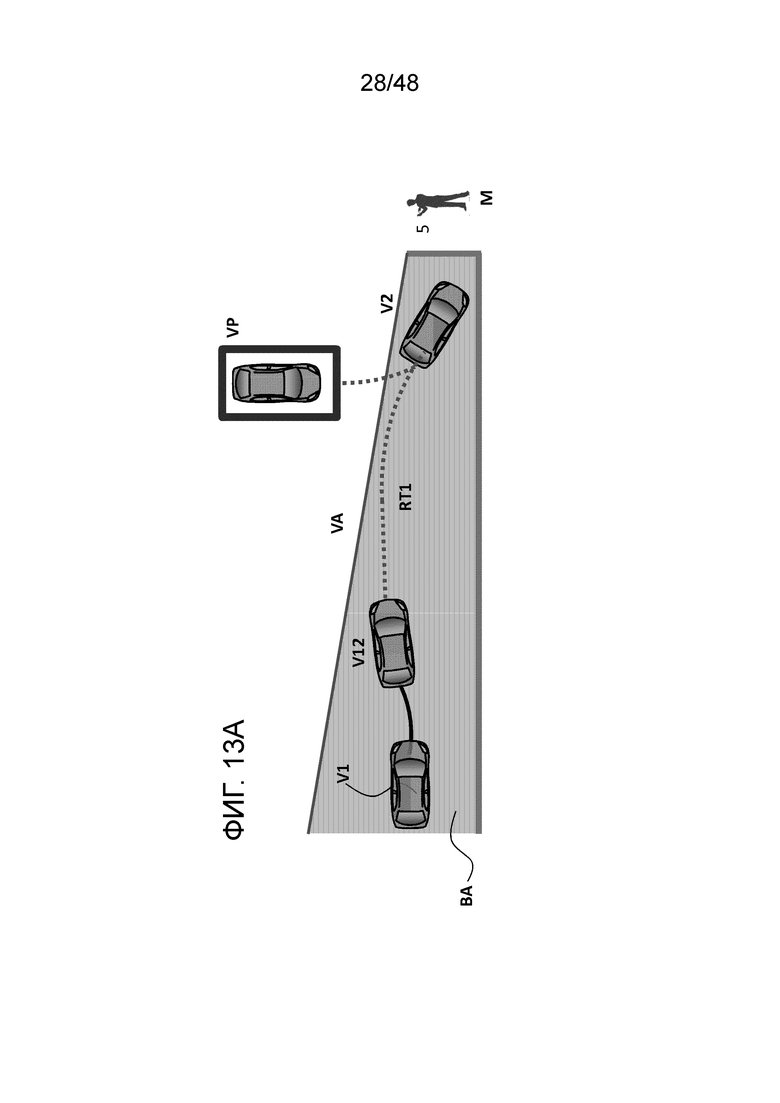
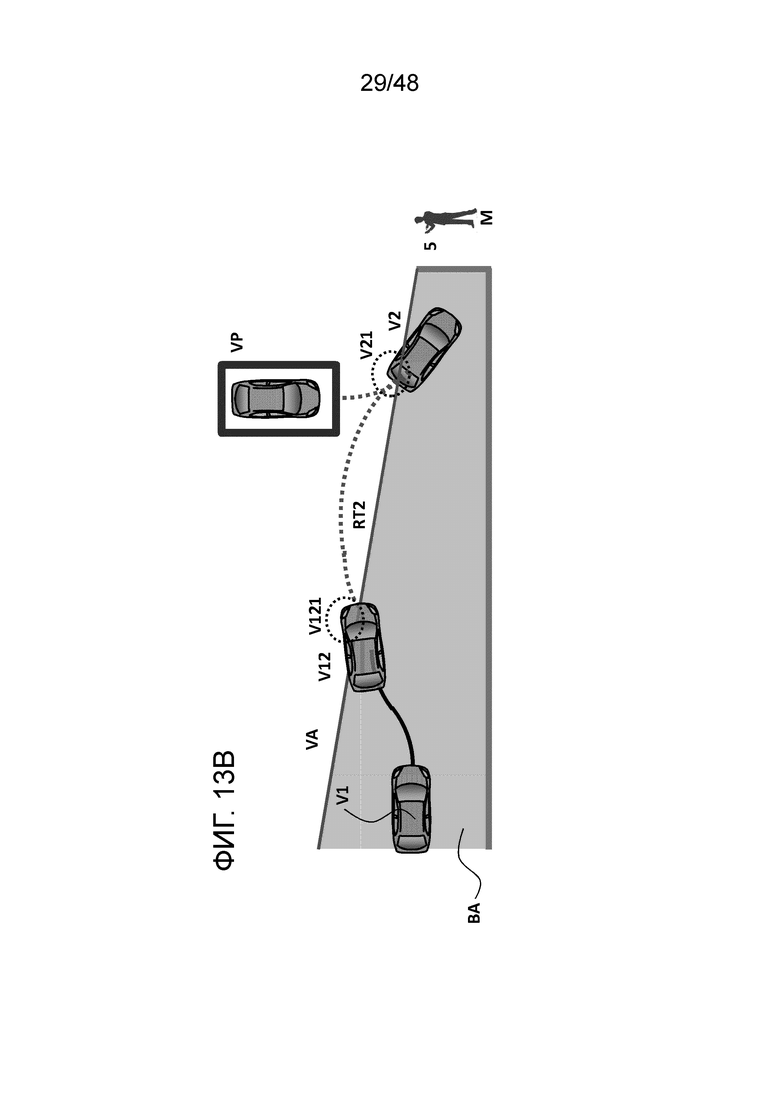
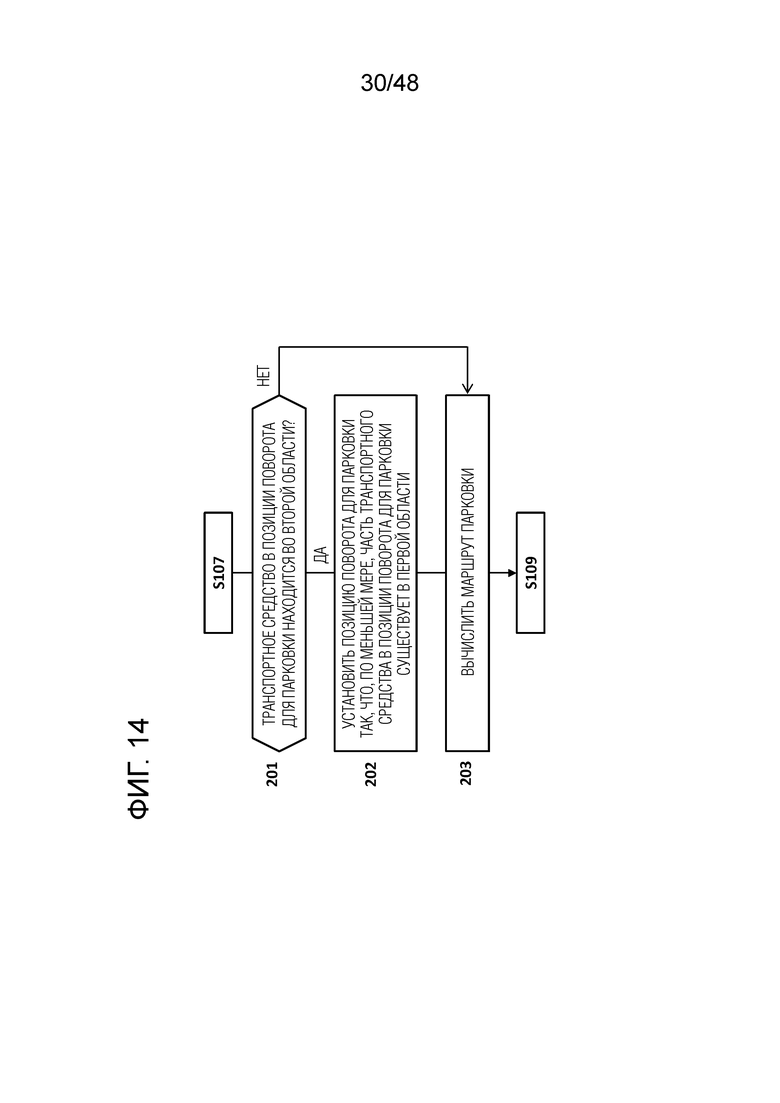
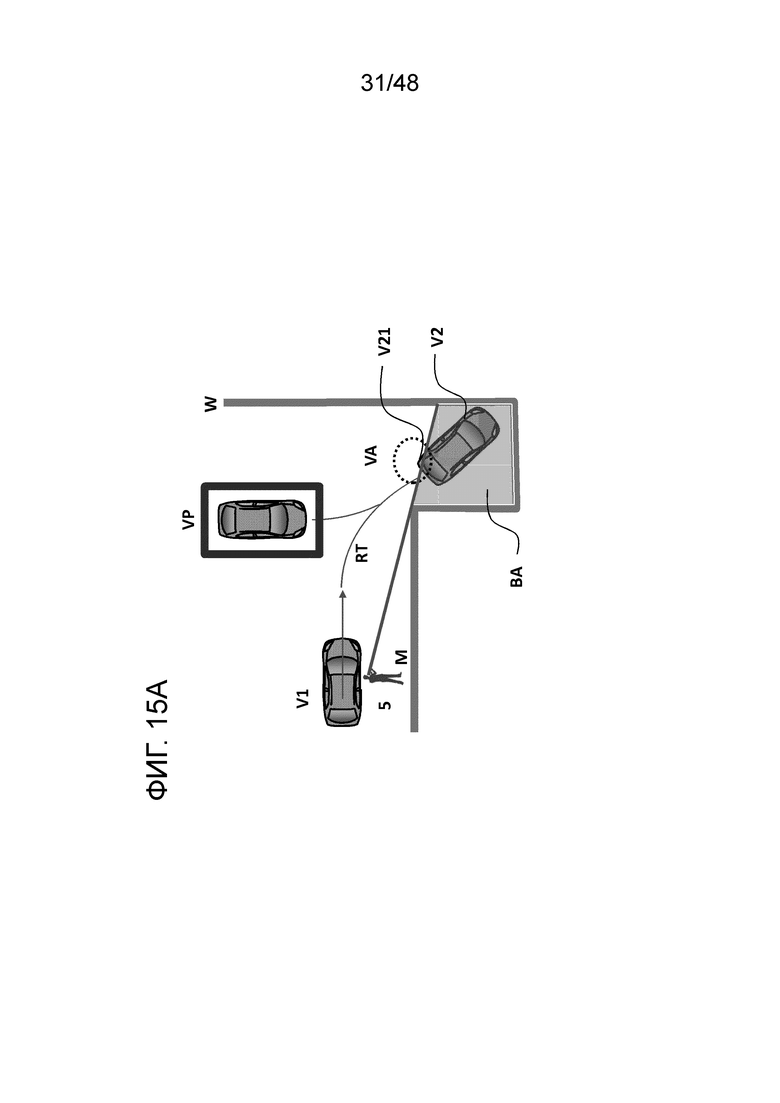
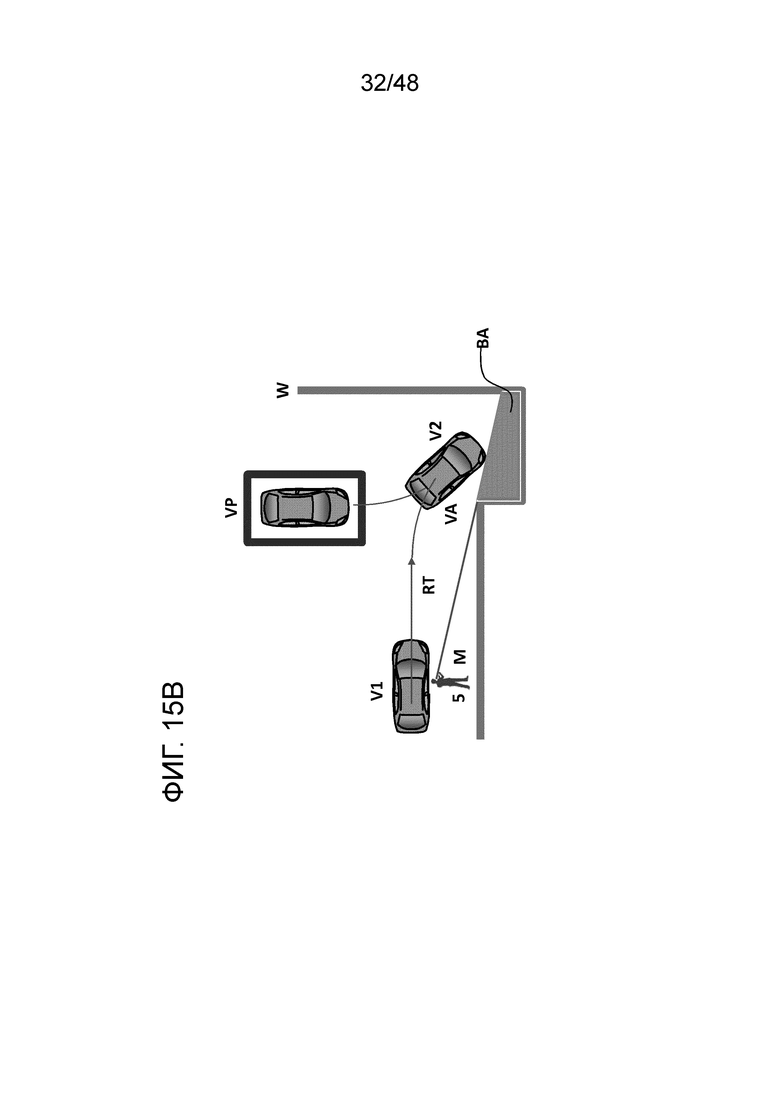
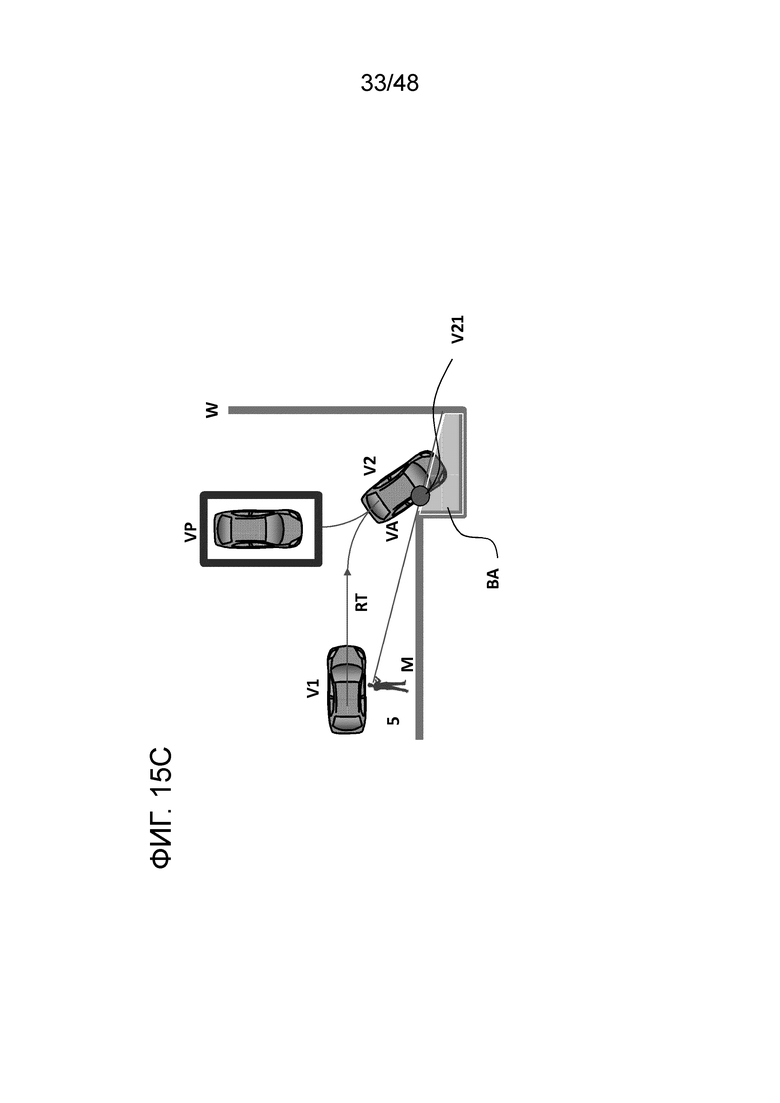
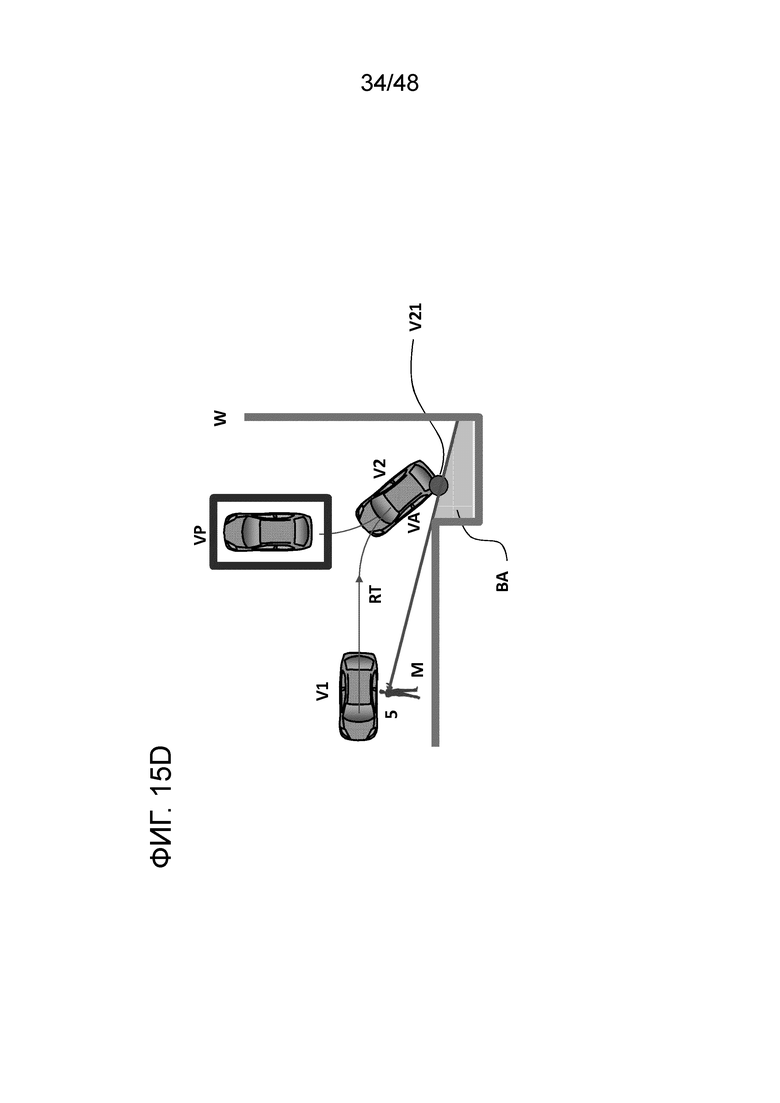
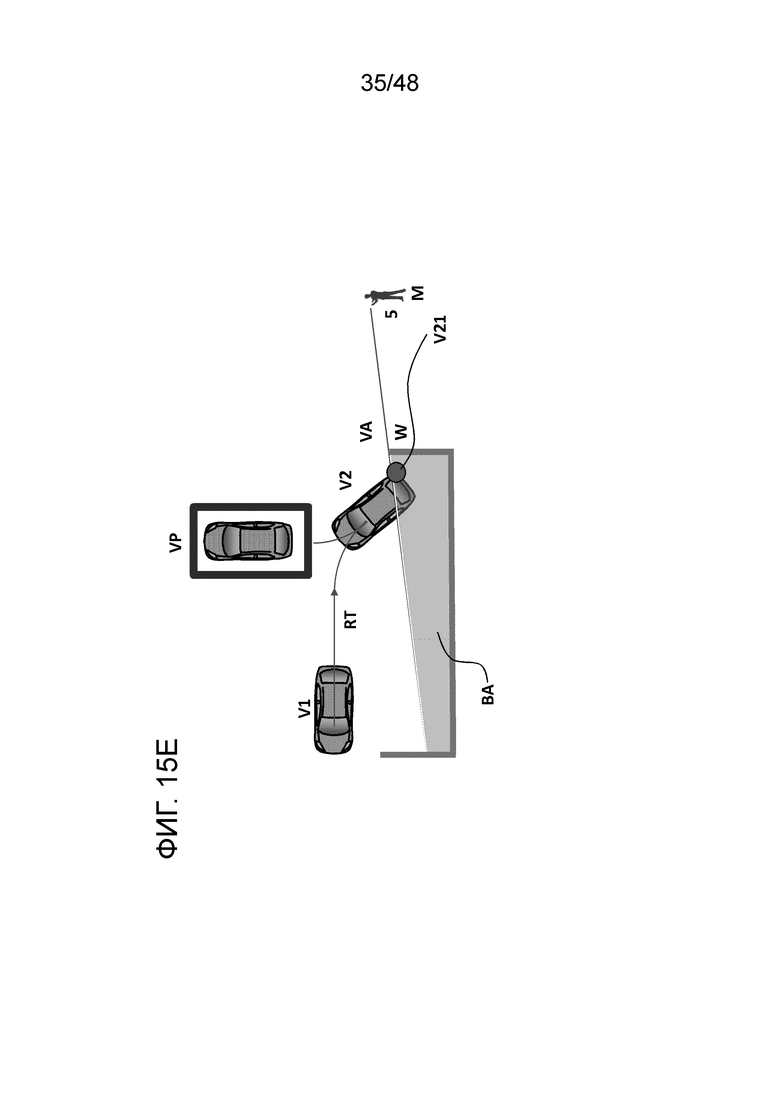
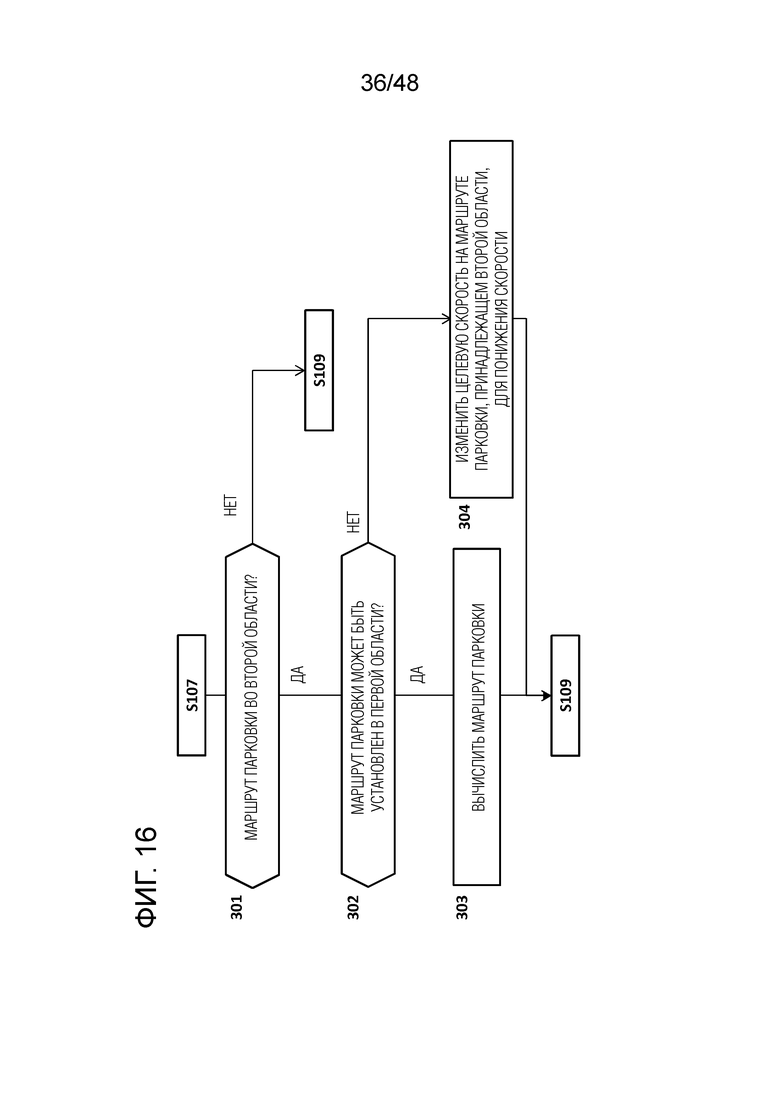
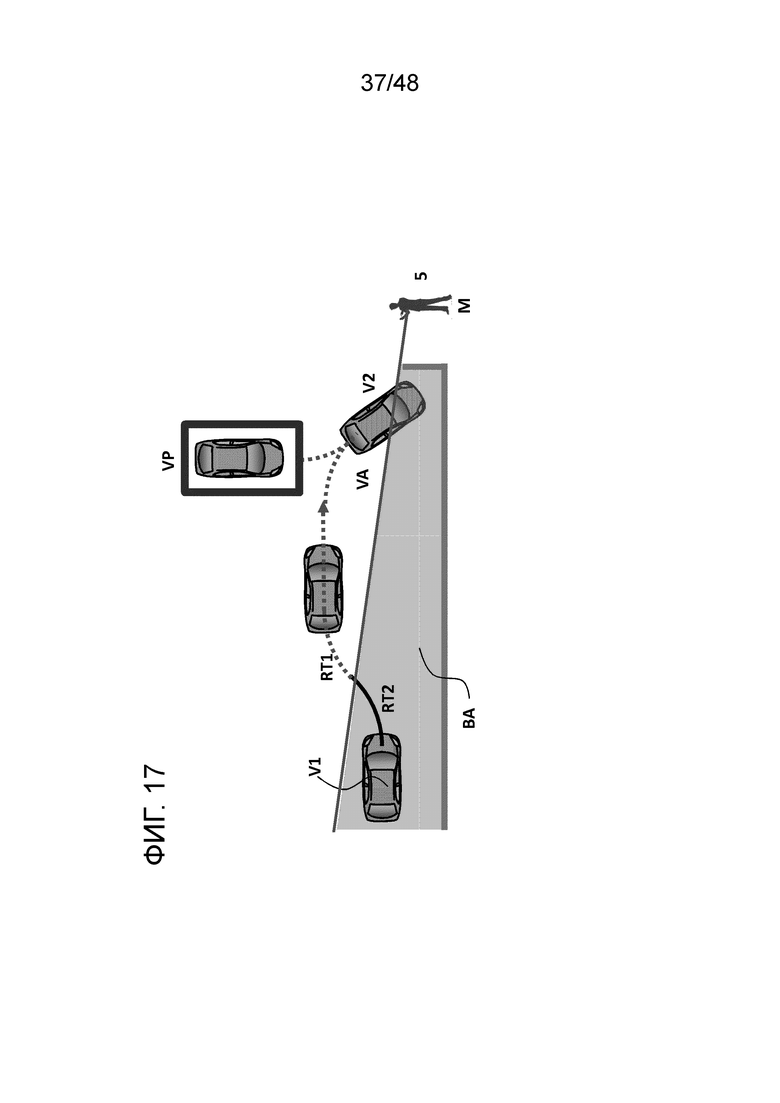
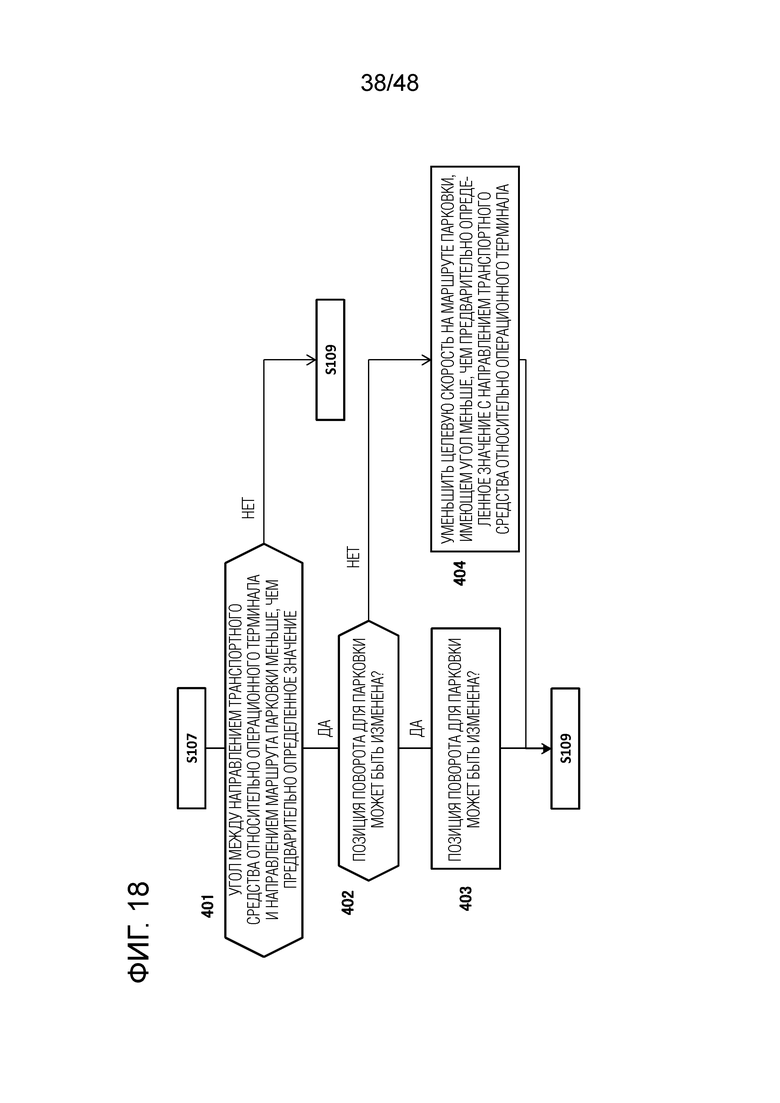
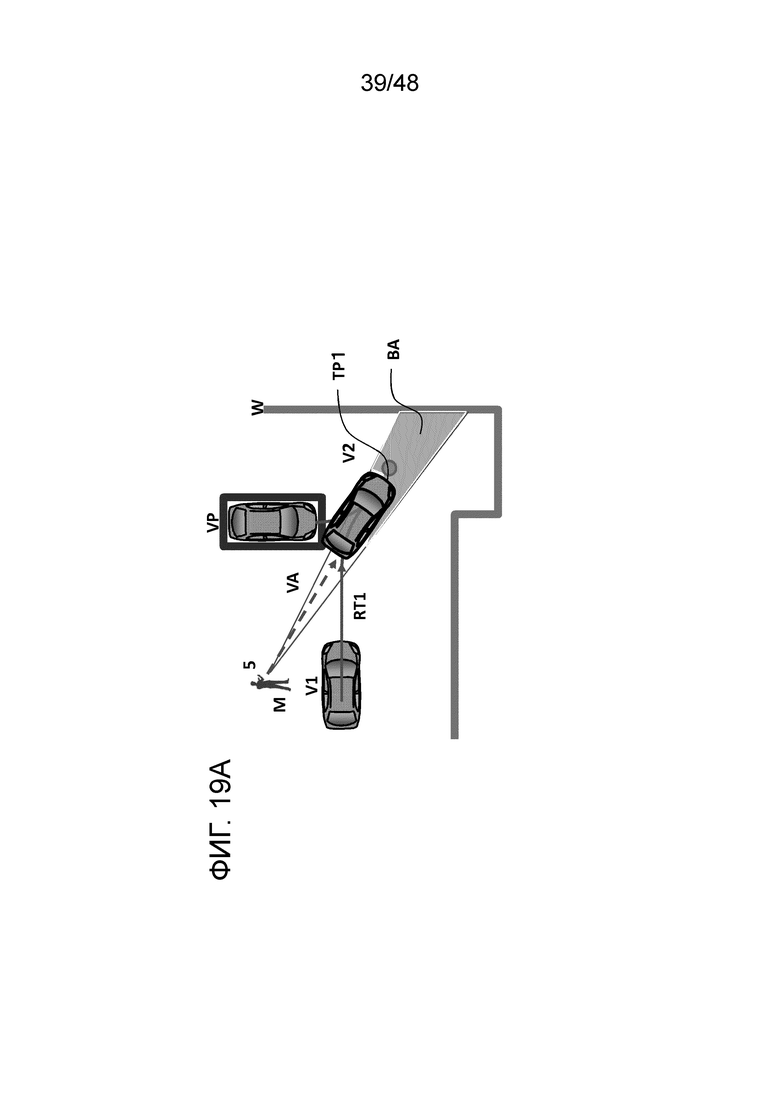
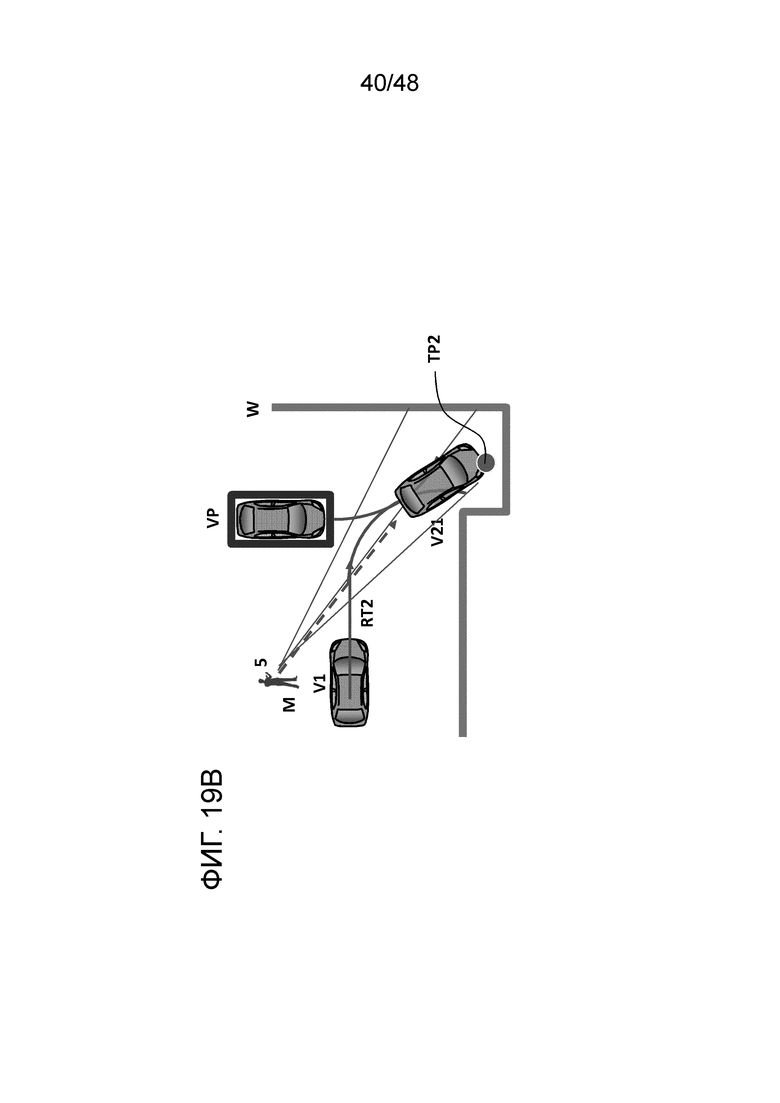
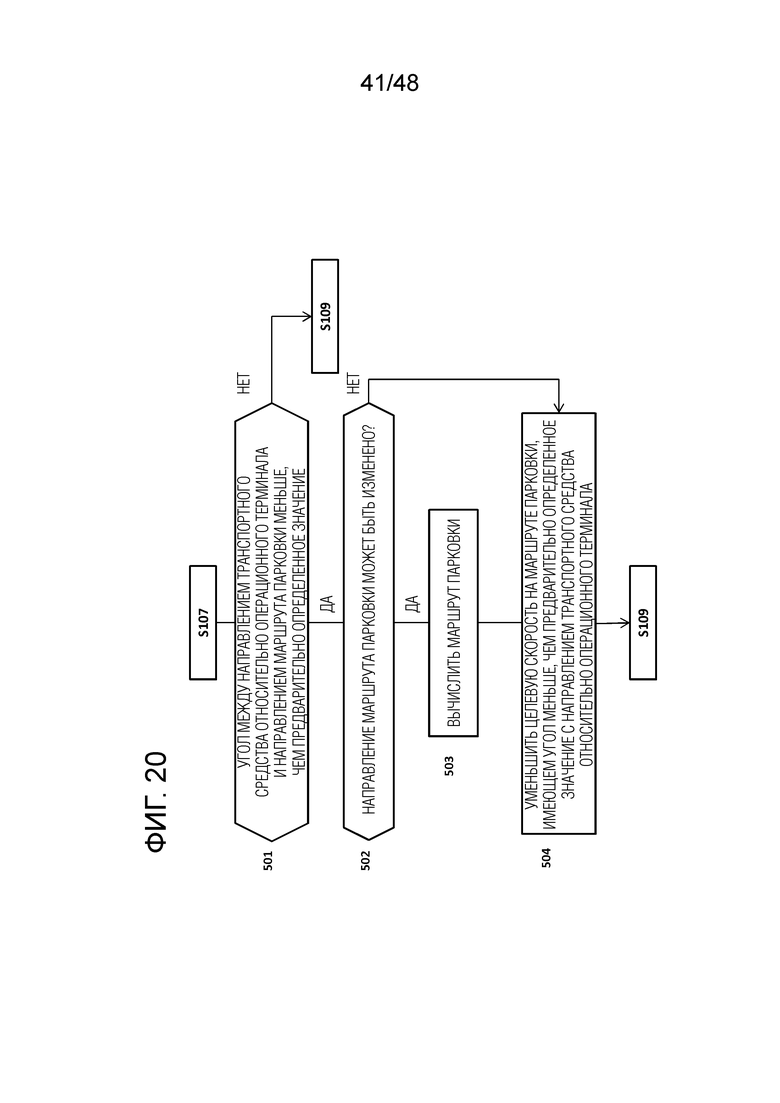
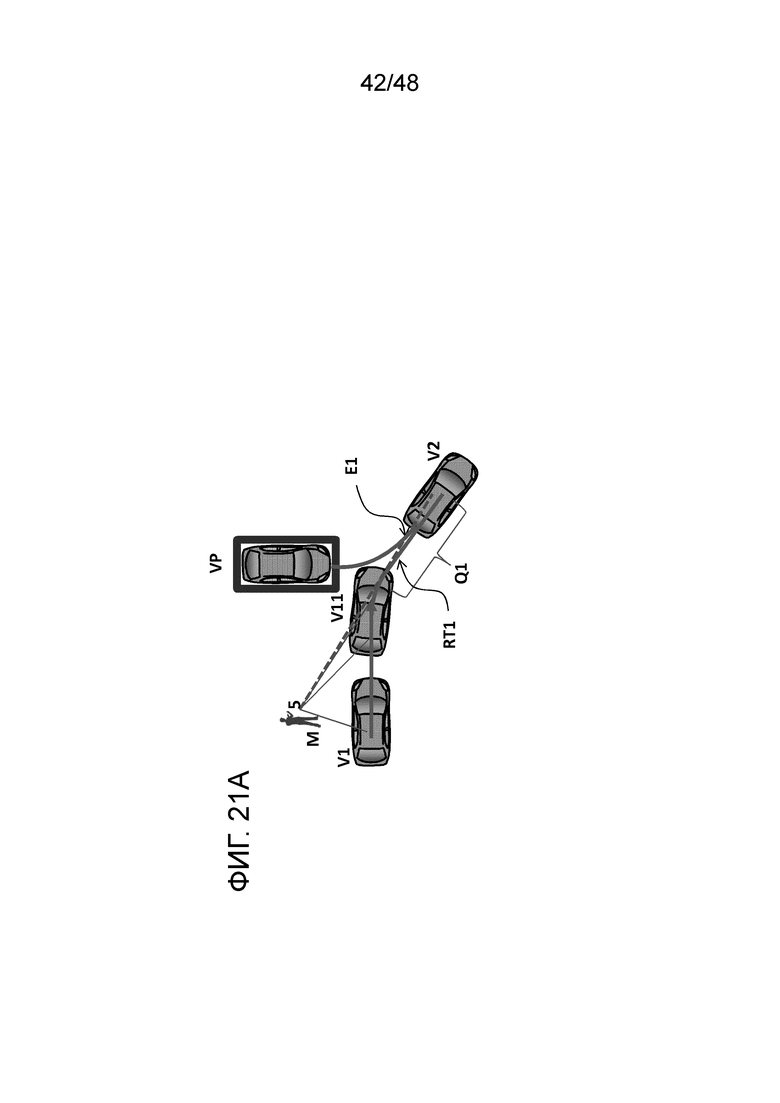

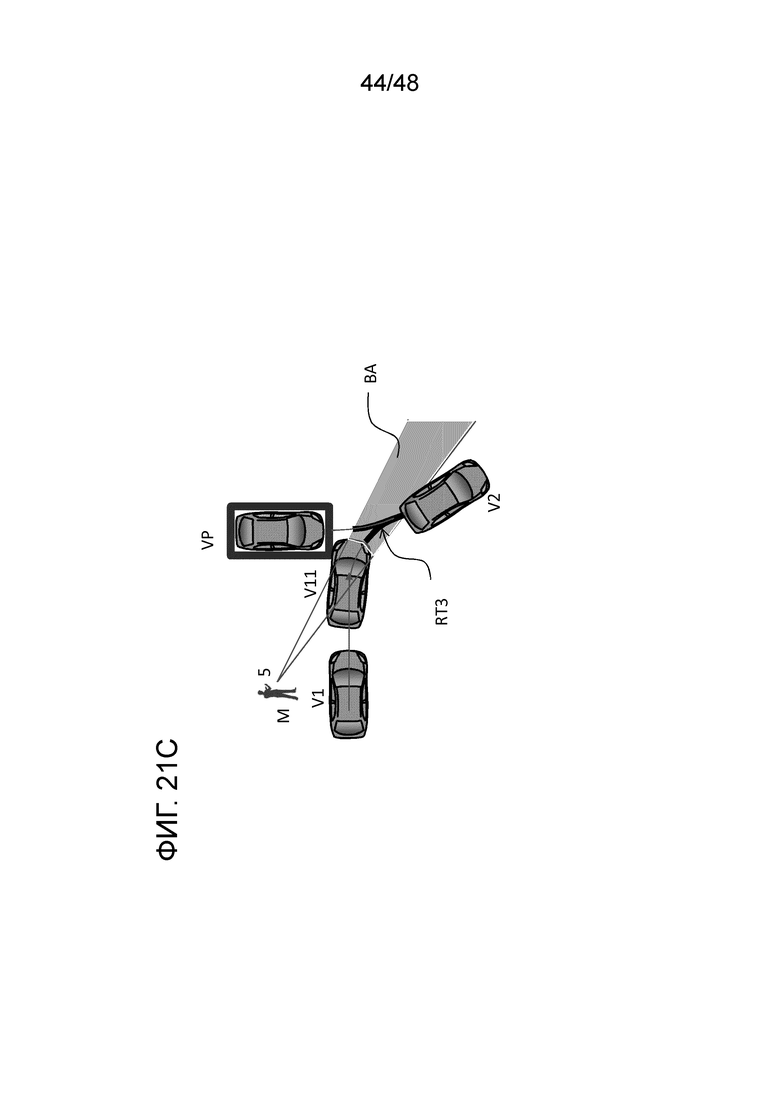
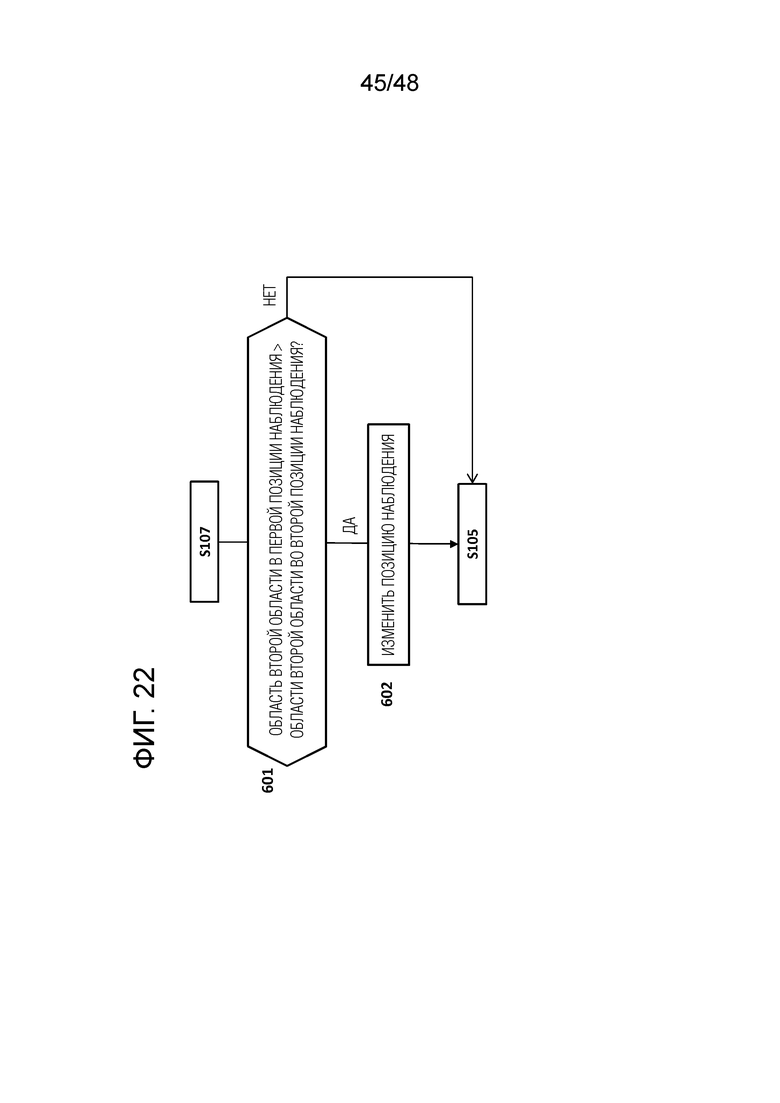
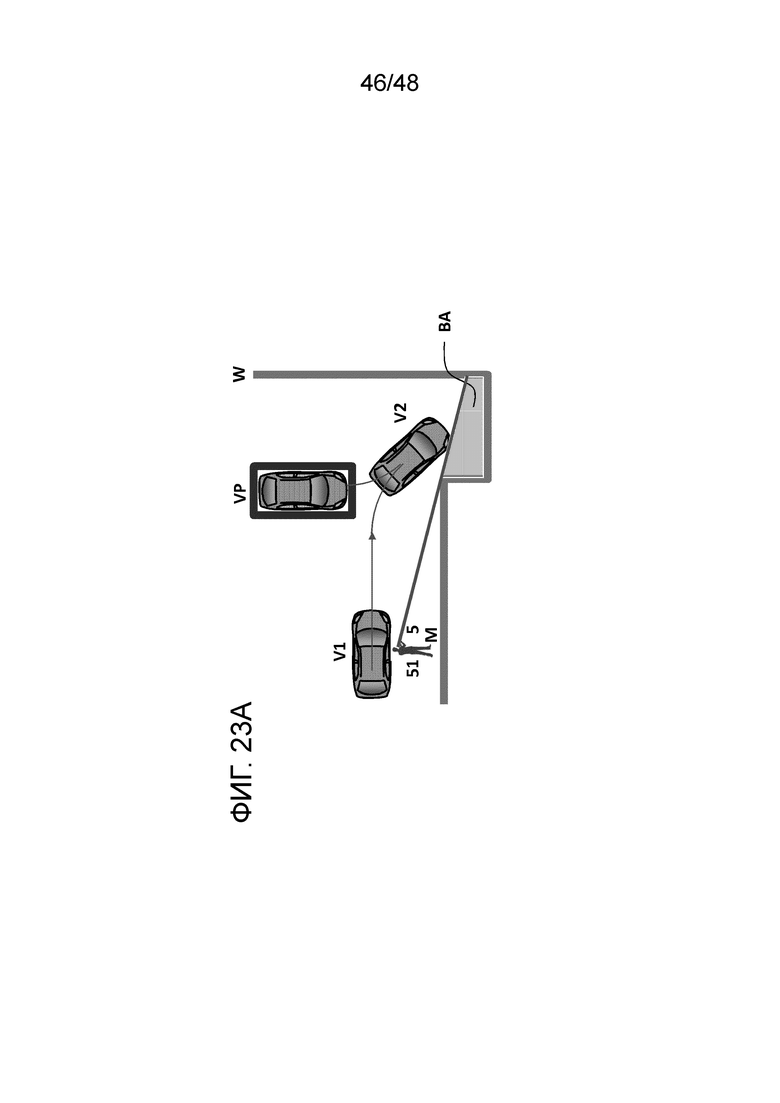
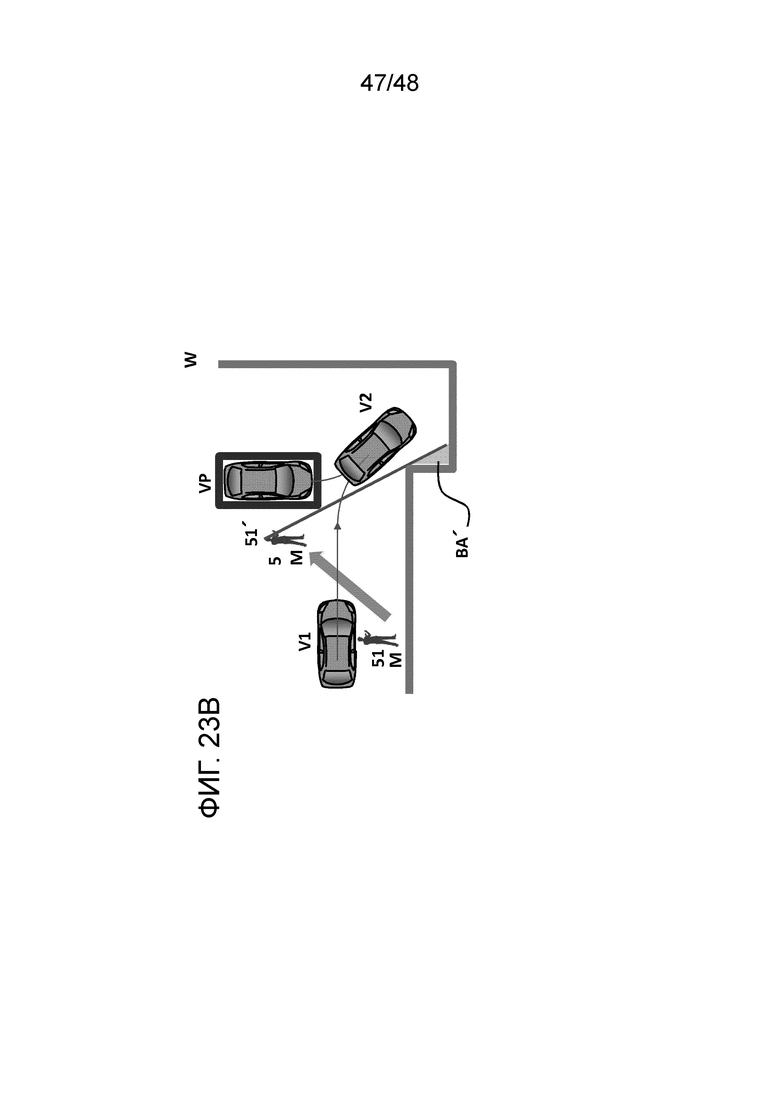
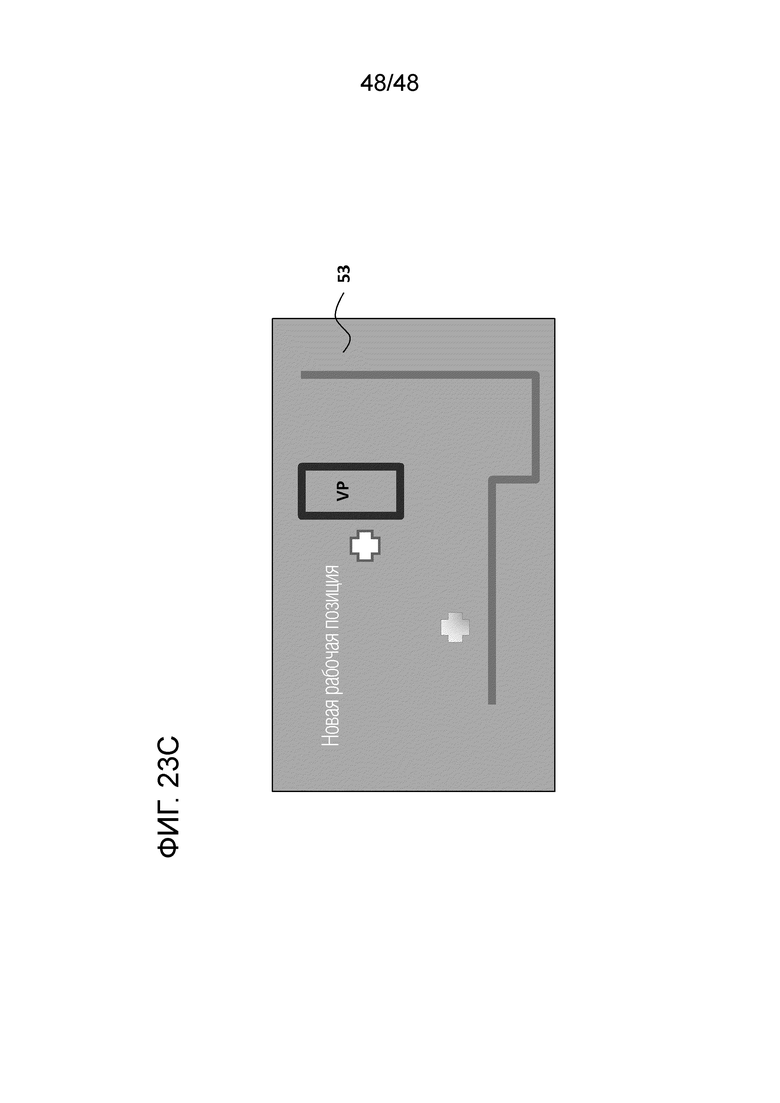
Изобретение относится к способу управления парковкой и аппаратуре управления парковкой. Способ управления парковкой для парковки транспортного средства на основе рабочей команды, полученной от оператора вне транспортного средства. Причем способ управления парковкой содержит обнаружение позиции оператора, обнаружение позиции препятствия, вычисление первой области, наблюдаемой оператором, и второй области, отличной от первой области и ненаблюдаемой оператором, на основе позиционной взаимосвязи между позицией препятствия и позицией оператора, вычисление маршрута парковки и команды управления для перемещения по маршруту парковки, чтобы первый уровень близости транспортного средства к препятствию в первой области был выше второго уровня близости транспортного средства к препятствию во второй области, и парковку транспортного средства в соответствии с командой управления. Аппаратура управления парковкой, содержащая устройство управления, сконфигурированное для выполнения команды управления для парковки транспортного средства на основе рабочей команды, полученной от оператора вне транспортного средства. Достигается повышение безопасности при парковке транспортного средства. 2 н. и 16 з.п. ф-лы, 48 ил.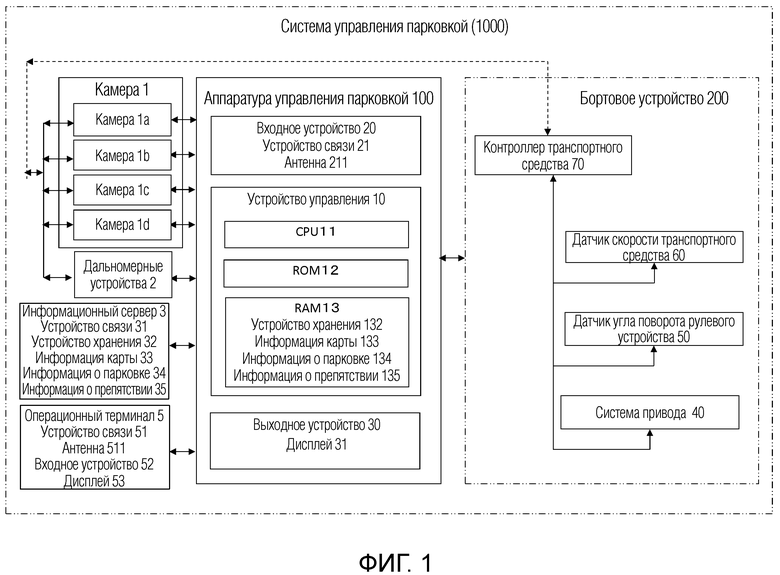
1. Способ управления парковкой для парковки транспортного средства на основе рабочей команды, полученной от оператора вне транспортного средства, причем способ управления парковкой содержит:
обнаружение позиции оператора;
обнаружение позиции препятствия, существующего вокруг транспортного средства;
вычисление первой области, наблюдаемой оператором, и второй области, отличной от первой области и не наблюдаемой оператором, на основе позиционной взаимосвязи между позицией препятствия и позицией оператора;
вычисление маршрута парковки и команды управления для перемещения по маршруту парковки, чтобы первый уровень близости транспортного средства к препятствию в первой области был выше второго уровня близости транспортного средства к препятствию во второй области; и
парковку транспортного средства в соответствии с командой управления.
2. Способ управления парковкой по п. 1, в котором
первый уровень близости представлен первым размером интервала, который позволяет транспортному средству приблизиться к препятствию,
второй уровень близости представлен вторым размером интервала, который позволяет транспортному средству приблизиться к препятствию, и
маршрут парковки вычисляется таким образом, чтобы первый размер интервала был меньше, чем второй размер интервала.
3. Способ управления парковкой по п. 1, в котором
вычисляемый маршрут парковки включает в себя позицию поворота для парковки,
первый уровень близости представлен первым расстоянием поворота между первой позицией поворота, принадлежащей первой области, и препятствием,
второй уровень близости представлен вторым расстоянием поворота между вторым позицией поворота, принадлежащей второй области, и препятствием, и
маршрут парковки вычисляется так, что первое расстояние поворота меньше второго расстояния поворота.
4. Способ управления парковкой по п. 1, в котором
первый уровень близости представлен первым расстоянием разнесения от препятствия до маршрута парковки,
второй уровень близости представлен вторым расстоянием разнесения от препятствия до маршрута парковки, и
маршрут парковки вычисляется так, что первое расстояние разнесения меньше второго расстояния разнесения.
5. Способ управления парковкой по п. 1, в котором
команда управления включает в себя время начала замедления, в которое начинается управление замедлением,
первый уровень близости представлен первым временем начала замедления, в которое начинается замедление при приближении к препятствию,
второй уровень близости представлен вторым временем начала замедления, в которое начинается замедление при приближении к препятствию, и
команда управления генерируется таким образом, что первое время начала замедления является более поздним, чем второе время начала замедления.
6. Способ управления парковкой по п. 1, в котором
команда управления включает в себя расстояние завершения замедления между точкой завершения замедления, в которой завершено управление замедлением, и препятствием,
первый уровень близости представлен первым расстоянием завершения замедления от препятствия до первой точки завершения замедления в первой области,
второй уровень близости представлен вторым расстоянием завершения замедления от препятствия до второй точки завершения замедления во второй области, и
команда управления генерируется так, что первое расстояние завершения замедления меньше второго расстояния завершения замедления.
7. Способ управления парковкой по п. 1, в котором
команда управления включает в себя замедление,
первый уровень близости представлен первым замедлением при приближении к препятствию,
второй уровень близости представлен вторым замедлением при приближении к препятствию, и
команда управления генерируется так, что первое замедление больше, чем второе замедление.
8. Способ управления парковкой по п. 1, в котором
команда управления включает в себя значения ограничения относительной скорости транспортного средства для оператора,
значения ограничения относительной скорости включают в себя первое значение ограничения относительной скорости между транспортным средством, принадлежащим к первой области, и оператором,
значения ограничения относительной скорости включают в себя второе значение ограничения относительной скорости между транспортным средством, принадлежащим второй области, и оператором, и
команда управления генерируется таким образом, что первое значение ограничения относительной скорости больше, чем второе значение ограничения относительной скорости.
9. Способ управления парковкой по п. 1, в котором маршрут парковки вычисляется так, что, по меньшей мере, часть транспортного средства существует в первой области вдоль, по меньшей мере, части маршрута парковки транспортного средства.
10. Способ управления парковкой по п. 9, в котором маршрут парковки вычисляется таким образом, что, по меньшей мере, часть транспортного средства существует в первой области, когда оно находится в позиции поворота для парковки, которая включена в маршрут парковки.
11. Способ управления парковкой по п. 9 или 10, в котором маршрут парковки вычисляют таким образом, чтобы в первой области существовала конкретная часть транспортного средства.
12. Способ управления парковкой по п. 11, в котором конкретная часть предварительно устанавливается в соответствии с формой парковки транспортного средства.
13. Способ управления парковкой по п. 9, в котором маршрут парковки вычисляют таким образом, чтобы, по меньшей мере, часть транспортного средства существовала в первой области, когда расстояние между транспортным средством и препятствием меньше предварительно определенного значения.
14. Способ управления парковкой по п. 9, в котором, когда угол между направлением транспортного средства относительно позиции оператора и направлением, по меньшей мере, части маршрута парковки меньше предварительно определенного угла, маршрут парковки изменен.
15. Способ управления парковкой по п. 9, в котором
вычисляют вторую область, отличную от первой области и не наблюдаемую оператором, и
когда, по меньшей мере, часть маршрута парковки транспортного средства принадлежит второй области, маршрут парковки вычисляется так, что, по меньшей мере, часть транспортного средства существует в первой области.
16. Способ управления парковкой по п. 15, в котором вторая целевая скорость на маршруте парковки, принадлежащем второй области, установлена ниже, чем первая целевая скорость на маршруте парковки, принадлежащем первой области.
17. Способ управления парковкой по п. 15 или 16, в котором, когда область второй области, ненаблюдаемой из первой позиции наблюдения, которая установлена на основе позиции оператора, больше, чем область второй области, ненаблюдаемой из второй позиции наблюдения, отличной от первой позиции наблюдения, вторая позиция наблюдения передается операционному терминалу, который несет оператор.
18. Аппаратура управления парковкой, содержащая устройство управления, сконфигурированное для выполнения команды управления для парковки транспортного средства на основе рабочей команды, полученной от оператора вне транспортного средства, причем устройство управления дополнительно сконфигурировано для:
обнаружения позиции оператора;
обнаружения позиции препятствия, существующего вокруг транспортного средства;
вычисления первой области, наблюдаемой оператором, и второй области, отличной от первой области и не наблюдаемой оператором, на основе позиционного соотношения между позицией препятствия и позицией оператора;
вычисления маршрута парковки и команды управления для перемещения по маршруту парковки так, чтобы первый уровень близости транспортного средства к препятствию в первой области был выше, чем второй уровень близости транспортного средства к препятствию во второй области; и
парковки транспортного средства в соответствии с командой управления.
| JP 2017030481 A, 09.02.2017 | |||
| JP 4962739 B2, 27.06.2012 | |||
| WO 2017068698 A1, 27.04.2017. |

