Изобретение относится к резальному устройству для экструзионной машины для теста, содержащему подвижную раму, проволоку или лезвие, закрепленное на упомянутой раме, и первый привод, соединенный с упомянутой рамой, вызывающий перемещение рамы в первом направлении. Кроме того, изобретение относится к способу резания теста, выдавливаемого экструзионной машиной для теста, причем упомянутое резание осуществляется посредством вышеописанного резального устройства, при котором упомянутую проволоку/лезвие циклически перемещают вдоль траектории перемещения, образующей замкнутую кривую во время резания.
Такое резальное устройство и такой способ резания общеизвестны в уровне техники. В этой связи US 2,488,046 раскрывает тесторезальную машину, которая периодически отрезает тесто для выпечки печенья или тому подобное, выдавливаемое из форсунок. Печенье падает на ленту и непрерывно перемещается к печи для выпечки. Рама, на которой закреплена режущая проволока, приводится в движение посредством одного электродвигателя и перемещается вдоль траектории перемещения, образующей замкнутую кривую. Траектория перемещения, как правило, определяется во время разработки резального устройства и впоследствии не может быть легко изменена.
Кроме того, ЕР 0 230 368 А2 раскрывает машину для формования сферической массы, содержащей оболочку из теста и начинку. Поэтому используется множество режущих элементов, которые открываются и закрываются наподобие ирисовой диафрагмы. Перемещение для резания может быть совмещено с вертикальным перемещением.
Наконец, ЕР 0 601 194 А1 раскрывает другую машину с множеством режущих элементов, которые открываются и закрываются наподобие ирисовой диафрагмы, и с возможностью совмещения вертикального перемещения с перемещением для резания.
Помимо сложных механических регулировок и модификаций, экструдер для печенья нужно останавливать перед изменением траектории перемещения и затем нужно снова запускать. Вследствие невозможно сразу оценивать эффекты регулировок и модификаций. В частности, запуск и остановка экструдера оказывают нестационарные эффекты на экструзию теста, соответственно искажающие эффекты регулировок и модификаций. Вследствие этого нахождение оптимальной траектории перемещения становится невозможным или по меньшей мере проблематичным.
Таким образом, задачей настоящего изобретения является создание усовершенствованного резального устройства и усовершенствованного способа резания. В частности, резальное устройство должно обеспечивать возможность простой модификации траектории перемещения проволоки/лезвия.
Упомянутая задача изобретения решается посредством вышеописанного резального устройства, содержащего второй привод, соединенный с упомянутой рамой, который вызывает перемещение рамы во втором направлении, проходящем поперек первого направления, и который может быть приведен в действие независимо от упомянутого первого привода.
Кроме того, упомянутая задача изобретения решается посредством способа использования резального устройства вышеописанного типа, в котором при перемещении проволоки/лезвия одновременно приводят в действие первый привод и второй привод.
В частности, для резания теста используют одну проволоку или одно лезвие. Таким образом, проволоку/лезвие можно легко содержать в чистоте.
Предпочтительно, форму траектории перемещения можно произвольно определять посредством изменения сигналов управления для первого и второго привода. При этом не требуется механическая регулировка и механическая модификация резального устройства. Следовательно, изменение формы траектории перемещения при перемещение проволоки/лезвия не только просто, но и возможно.
Таким образом, можно оптимизировать процесс резки при изготовления печенья, а эффекты изменения траектории перемещения сразу становятся очевидными. Остановка и запуск экструдера, которые необходимы в известных решениях и которые вызывают нестационарные эффекты, соответственно не позволяющие осуществлять оптимальную регулировку траектории перемещения, могут быть исключены.
В предпочтительном варианте осуществления, траектория перемещения проволоки/лезвия представляет собой замкнутую кривую. Это обеспечивает предпочтительное непрерывное перемещение (без остановок) проволоки/лезвия. Таким образом, могут быть достигнуты высокие скорости проволоки/лезвия при всего лишь средних ускорениях.
В предпочтительном варианте осуществления изобретения, упомянутое резальное устройство содержит блок управления, соединенный с упомянутыми первым и вторым приводами и приспособленный для вычисления сигналов управления для данных приводов на основе заданной траектории перемещения для проволоки/лезвия. Например, траектория перемещения может быть показана на сенсорной панели, на которой оператор может изменять ее посредством простых операций перетаскивания.
Необходимо отметить, что изобретение относится не только к резанию теста, но и к резанию других кондитерских материалов в пищевой промышленности, таких как кондитерский шоколад или карамель и т.п.
Другие предпочтительные варианты осуществления раскрыты в формуле изобретения и в описании, а также на чертежах.
Предпочтительно, первое направление и второе направление по существу перпендикулярны друг другу. Таким образом, формирование траектории перемещения для проволоки/лезвия на основе совмещения упомянутых двух перемещений является сравнительно простым. Данное преимущество имеет особое значение, если первый привод вызывает по существу горизонтальное перемещение рамы, а второй привод вызывает по существу вертикальное перемещение рамы. В данном случае «по существу» означает в пределах +/-10°.
В другом предпочтительном варианте осуществления изобретения, упомянутое резальное устройство содержит третий привод, соединенный с упомянутой проволокой или лезвием, который вызывает перемещение проволоки/лезвия в третьем направлении, проходящем поперек первого направления и поперек второго направления, в частности по существу перпендикулярно первому направлению и по существу перпендикулярно второму направлению. Следовательно, резание теста улучшается посредством срезающего перемещения проволоки/лезвия при ее перемещении вперед.
В предпочтительном варианте осуществления изобретения, первый привод представляет собой первый линейный двигатель и/или второй привод представляет собой второй линейный двигатель и/или третий привод представляет собой третий линейный двигатель. Таким образом, могут быть легко осуществлены прямолинейные перемещения режущей проволоки/лезвия. Например, линейные двигатели могут быть выполнены в виде гидравлических цилиндров, пневматических цилиндров или (электрических) шпиндельных двигателей.
В альтернативном предпочтительном варианте осуществления изобретения, первый привод представляет собой первый вращательный двигатель и/или второй привод представляет собой второй вращательный двигатель и/или третий привод представляет собой третий вращательный двигатель. Вращательные двигатели являются легко доступными и надежными. Вращательные двигатели могут быть выполнены в виде гидравлических двигателей, пневматических двигателей или электрических двигателей. Вращательные приводы вообще способны перемещаться непрерывно в одном направлении с постоянной угловой скоростью или с изменяющейся скоростью во время одного оборота, управление которой осуществляется посредством блока управления. Однако вращательные двигатели могут также перемещаться возвратно-поступательно, чтобы вызывать перемещение проволоки/лезвия. В частности, в этом случае эксцентричность точек соединения для шатунов может быть очень большой по сравнению с длиной перемещения проволоки/лезвия.
В другом предпочтительном варианте осуществления изобретения, рама установлена на каретке посредством первой линейной рейки или направляющей, ориентированной в упомянутом первом направлении, и упомянутая каретка установлена на основании посредством второй линейной рейки или направляющей, ориентированной в упомянутом втором направлении, или наоборот. Таким образом получается последовательный манипулятор, который является признанным средством для формирования траектории перемещения для проволоки/лезвия на основе совмещения упомянутых двух перемещений.
Предпочтительно, рама соединена с упомянутым первым приводом посредством первого шатуна и с упомянутым вторым приводом посредством второго шатуна. При помощи данных средств вращательные двигатели, а также линейные двигатели могут быть соединены с рамой.
В данном случае предпочтительно первый конец первого шатуна поворотно прикреплен к упомянутой раме, а второй конец первого шатуна поворотно прикреплен к эксцентриковой точке первого поворотного диска или рычага, который выполнен с возможностью вращения посредством первого привода. Таким образом, перемещение вращательного двигателя может быть преобразовано в прямолинейное перемещение рамы или перемещение вдоль произвольной кривой. Перемещение линейного двигателя может быть также преобразовано в перемещение рамы вдоль произвольной кривой. В зависимости от эксцентричности точек соединения для шатунов, всего лишь небольшое угловое перемещение поворотного диска может вызывать сравнительно большое перемещение лезвия/проволоки. Следовательно, лезвие/проволока может перемещаться с высокой скоростью. Вообще скорость перемещения проволоки/лезвия может находиться в пределах от 0,2 м/с до 0,7 м/с, а ее ускорение равно или меньше 65 м/с2.
В другом предпочтительном варианте осуществления рама соединена с упомянутым вторым приводом посредством двух параллельных вторых шатунов, при этом первые концы вторых шатунов поворотно прикреплены к упомянутой раме в первых точках соединения, расположенных на раме на расстоянии, при этом вторые концы вторых шатунов поворотно прикреплены к эксцентриковым точкам вторых поворотных дисков или рычагов во вторых точках соединения, при этом первые и вторые точки соединения образуют углы виртуального параллелограмма и при этом упомянутые вторые поворотные диски или рычаги выполнены с возможностью синхронного вращения посредством второго привода. Следовательно, ориентация рамы может быть легко сохранена во время перемещения или по меньшей мере может быть определена посредством положения вторых поворотных дисков или рычагов. Таким образом могут быть исключены линейные направляющие и может быть уменьшен механический износ.
Упомянутые преимущества имеют особое значение, если вторые диски/рычаги соединены посредством третьего шатуна, поворотно прикрепленного к эксцентриковым точкам вторых дисков/рычагов на одинаковых радиусах. Таким образом, во время синхронного перемещения вторых поворотных дисков или рычагов рама сохраняет свою ориентацию в пространстве.
Вообще вторые поворотные диски или рычаги могут независимо приводиться в движение посредством независимых двигателей, синхронно приводиться в движение посредством независимых двигателей или могут быть соединены посредством зубчатого колеса, ремня или шатуна и приводиться в движение посредством одного двигателя.
Кроме того, рама может являться частью последовательного манипулятора или параллельного манипулятора, как описано ниже в данном документе.
При этом отмечается, что варианты осуществления резального устройства для экструзионной машины для теста и соответствующие преимущества, представленные в данном документе, одинаково относятся к способу резания теста, выдавливаемого экструзионной машиной для теста, и наоборот.
Для лучшего понимания изобретения ниже приведены чертежи, показывающие варианты осуществления изобретения. Упомянутые чертежи схематично показывают:
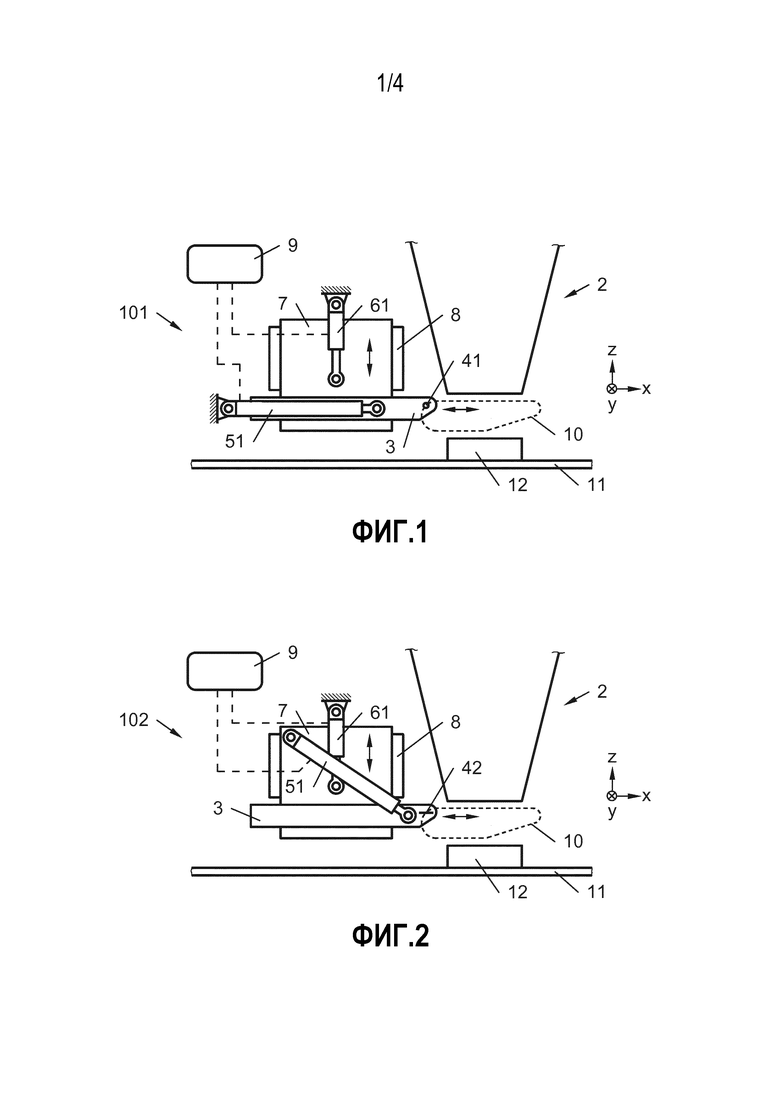
Фиг.1 схематичный вид сбоку первого примера резального устройства для экструзионной машины для теста с линейными приводами и параллельным манипулятором для рамы;
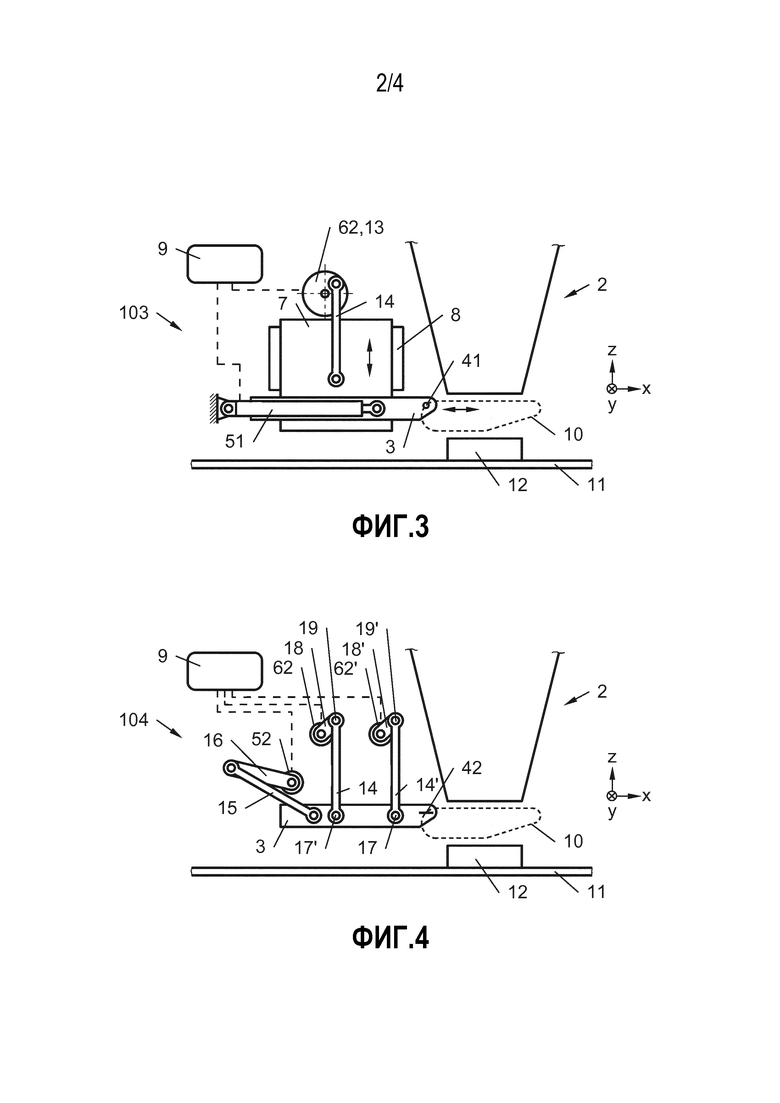
Фиг.2 схематичный вид сбоку второго примера резального устройства для экструзионной машины для теста с линейными приводами и последовательным манипулятором для рамы;
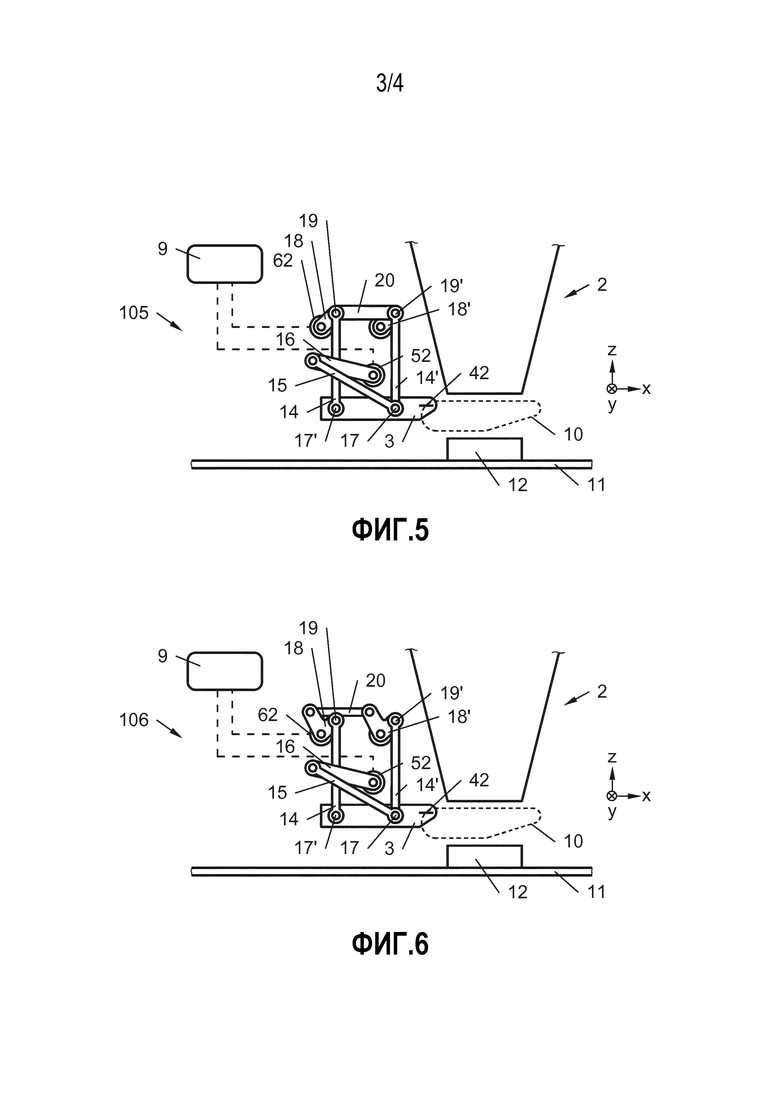
Фиг.3 представляет собой вариант, аналогичный фиг.1, но с вращательным вторым приводом;
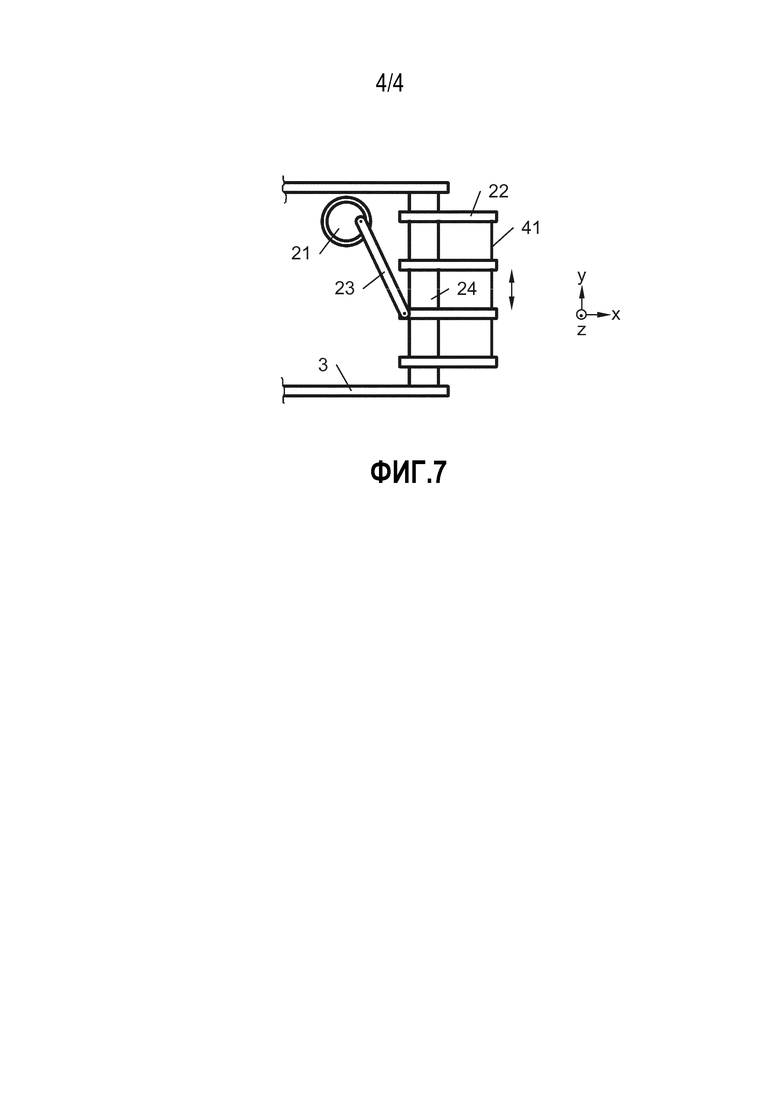
Фиг.4 представляет собой схематичный вид сбоку другого примера резального устройства для экструзионной машины для теста с вращательными приводами и параллельным манипулятором для рамы;
Фиг.5 представляет собой вариант, аналогичный фиг.4, но с одним вторым приводом;
Фиг.6 представляет собой вариант, аналогичный фиг.5, но с вторыми рычагами другой формы и
Фиг.7 представляет собой схематичный вид сверху конструкции, обеспечивающей колебательное движение режущей проволоки в третьем направлении.
Вообще одинаковые детали или подобные детали указаны одинаковыми/подобными названиями и ссылочными позициями. Признаки, раскрытые в описании, относятся к деталям с одинаковыми/аналогичными названиями и соответственно ссылочными позициями. Указание ориентации и относительного положения (вверх, вниз, в сторону и др.) относится к соответствующему чертежу, и указание ориентации и/или относительного положения должно быть уточнено в других чертежах соответствующим образом в зависимости от конкретного случая.
Фиг.1 показывает схематичный вид сбоку первого примера резального устройства 101 для экструзионной машины 2 для теста. Резальное устройство 101 содержит подвижную раму 3, проволоку 41, размещенную на упомянутой раме 3, и первый привод 51, соединенный с упомянутой рамой 3, вызывающий перемещение рамы 3 в первом направлении х. Кроме того, резальное устройство 101 содержит второй привод 61, соединенный с упомянутой рамой 3, вызывающий перемещение рамы 3 во втором направлении z, проходящем поперек первого направления х. Второй привод 61 может быть приведен в действие независимо от упомянутого первого привода 51.
В данном примере рама 3 установлена на каретке 7 посредством первой линейной рейки или направляющей, ориентированной в первом направлении х, и упомянутая каретка 7 установлена на основании 8 посредством второй линейной рейки или направляющей, ориентированной в упомянутом втором направлении z. Таким образом, каретка 7 способна перемещаться в вертикальном направлении z, а рама 3 способна перемещаться в горизонтальном направлении х и в вертикальном направлении z. Однако в альтернативном варианте осуществления каретка 7 может перемещаться в горизонтальном направлении х, а рама 3 перемещается в вертикальном направлении z и горизонтальном направлении х. Хотя данная конструкция содержит ряд признаков последовательного манипулятора, строго говоря, она включает в себя параллельный манипулятор, поскольку горизонтальное перемещение рамы 3 совершенно не зависит от вертикального положения каретки 7.
В вышеописанном примере, первое направление х и второе направление z по существу перпендикулярны друг другу, и первый привод 51 вызывает горизонтальное перемещение рамы 3, а второй привод 61 вызывает вертикальное перемещение рамы 3. Хотя данный вариант является предпочтительным, это не является обязательным условием. Первое направление х и второе направление z могут также образовывать другой угол и могут также проходить под наклоном относительно горизонтального и вертикального направления.
В данном примере, оба привода 51 и 61 выполнены в виде линейных двигателей, например, в виде гидравлических цилиндров, пневматических цилиндров или шпиндельных двигателей. Кроме того, приводы 51 и 61 непосредственно соединены с рамой 3 соответственно с кареткой 7. Однако упомянутые приводы 51 и 61 могут быть также соединены с рамой 3 соответственно с кареткой 7 посредством соединительных шатунов.
Наконец, резальное устройство 101 содержит блок 9 управления, соединенный с первым приводом 51 и вторым приводом 61. Блок 9 управления приспособлен для вычисления сигналов управления для приводов 51 и 61 на основе заданной траектории 10 перемещения для проволоки 41.
Помимо вышеупомянутых элементов, показан противень, поддон или лента 11 с печеньем 12 сверху. Необходимо отметить, что для упрощения на фиг.1 показана только форсунка экструзионной машины 2 для теста. Однако в действительности экструзионная машина 2 для теста содержит дополнительные средства, например, такие как бункер и подающие валки. Экструзионная машина 2 для теста, а также лента 11 в принципе известны из уровня техники и поэтому подробно не описаны.
Конструкция, показанная на фиг.1, функционирует следующим образом.
Тесто подают через форсунку и отрезают проволокой 41 во время ее горизонтального перемещения. После этапа резания, проволоку 41 перемещают вниз и возвращают в ее исходное положение. Следовательно, проволока 41 циклически перемещается вдоль траектории 10 перемещения, которая образует замкнутую кривую. Во время упомянутого перемещения оба привода 51 и 61 приводят в действие одновременно. Предпочтительно, форму траектории 10 перемещения можно определять произвольно. В особенно предпочтительном варианте осуществления форму траектории 10 перемещения изменяют во время перемещения проволоки 41.
Таким образом, при изготовлении печенья 12 процесс резания может быть оптимизирован, и эффекты изменения траектории 10 перемещения сразу становятся очевидными. Остановка и запуск экструдера 2, которые сами по себе вызывают нестационарные эффекты и не позволяют осуществлять оптимальную регулировку траектории 10 перемещения, могут быть исключены.
Предпочтительно, блок 9 управления вычисляет сигналы управления для приводов 51 и 61 на основе траектории 10 перемещения, задаваемой оператором. Например, траектория 10 перемещения может быть показана на сенсорном экране, где оператор может изменять ее посредством простых операций перетаскивания.
В примере, показанном на фиг.1, как было отмечено выше, резальное устройство 101 включает в себя параллельный манипулятор. Однако это не единственное возможное решение. Фиг.2 показывает другой пример резального устройства 102 с последовательным манипулятором. Поэтому левый конец первого привода 51 закреплен на каретке 7. В данном примере, первый привод 51 установлен в наклонном положении. Однако первый привод 51 может быть также установлен в горизонтальном положении. Предпочтительно, в данном варианте осуществления вертикальное перемещение каретки 7 не влияет на горизонтальное перемещение рамы 3, соответственно позволяя использовать довольно простой блок 9 управления. Необходимо также отметить, что в варианте осуществления, показанном на фиг.2, вместо проволоки 41 используется лезвие 42.
Фиг.3 показывает другой вариант резального устройства 103, которое аналогично резальному устройству 101, показанному на фиг.1. Но в отличие от него, резальное устройство 103 содержит не второй линейный привод 61, а второй привод 62, который выполнен в виде вращательного двигателя и который вращает диск 13 с эксцентриковой осью. Шатун 14 соединяет упомянутую ось диска 13 с кареткой 7, таким образом преобразуя вращательное движение второго привода 62 в прямолинейное перемещение каретки 7. На фиг.3 первый привод 51 представляет собой линейный привод. Однако вместо него может быть также использован вращательный двигатель с диском и шатуном.
Фиг.4 показывает вариант осуществления резального устройства 104 с другой кинематикой. Конкретно, резальное устройство 104 содержит первый привод 52 и два вторых привода 62, 62', выполненных в виде вращательных двигателей. Рама 3 соединена с упомянутым первым приводом 52 посредством первого шатуна 15 и с упомянутыми вторыми приводами 62, 62' посредством вторых шатунов 14, 14'. Первый конец первого шатуна 15 поворотно прикреплен к раме 3, а второй конец первого шатуна 15 поворотно прикреплен к эксцентриковой точке первого поворотного рычага 16, который выполнен с возможностью вращения посредством первого привода 52.
Первые концы вторых шатунов 14, 14' поворотно прикреплены к раме 3 в первых точках 17, 17' соединения, расположенных на раме 3 на расстоянии, а вторые концы вторых шатунов 14, 14' поворотно прикреплены к эксцентриковым точкам вторых поворотных рычагов 18, 18' во вторых точках 19, 19' соединения. Левый второй шатун 14 расположен параллельно правому второму шатуну 14', и первые точки 17, 17' соединения и вторые точки 19, 19' соединения образуют углы виртуального параллелограмма. В конкретном положении, показанном на фиг.4, точки 17, 17' и 19, 19' даже образуют углы виртуального прямоугольника. В данном примере, резальное устройство 104 включает в себя параллельный манипулятор.
Конструкция, показанная на фиг.4, функционирует следующим образом.
Блок 9 управления генерирует сигналы управления для первого привода 52 и вторых приводов 62, 62' в соответствии с заданной траекторией 10 перемещения. Вторые рычаги 18, 18' вращаются синхронно посредством вторых приводов 62, 62'. Поэтому при перемещении рама сохраняет свою (горизонтальную) ориентацию. Вторые приводы 62, 62' преимущественно осуществляют вертикальное перемещение рамы 3 и только небольшое горизонтальное перемещение. Для того чтобы осуществлять значительное горизонтальное перемещение, преимущественно приводят в действие первый привод 52, а вторые приводы 62, 62' только осуществляют корректирующее перемещение.
В вышеописанном примере, эксцентричность осей на вторых рычагах 18, 18' одинаковая, так что точки 17, 17' и 19, 19' всегда образуют углы виртуального параллелограмма. Хотя это предпочтительный вариант осуществления, эксцентричность упомянутых осей может быть также разной. Вызываемое тем самым отклонение рамы 3 может быть скорректировано посредством первого привода 52. Предпочтительно, в таком варианте осуществления вместо лезвия 42 может быть использована проволока 41.
В данном примере, резальное устройство 104 содержит два вторых привода 62, 62' для вращения вторых рычагов 18, 18'. Однако один второй привод 62 может быть использован вместе с вторыми рычагами 18, 18', соединенными посредством зубчатого колеса, ремня или цепи, таким образом осуществляя синхронное перемещение вторых рычагов 18, 18'. В качестве альтернативы, вторые рычаги 18, 18' могут быть соединены посредством третьего шатуна, который поворотно прикреплен к эксцентриковым точкам вторых рычагов 18, 18', в частности на одинаковых радиусах. Фиг.5 и 6 показывают примеры таких конструкций.
В варианте осуществления, показанном на фиг.5, который аналогичен варианту осуществления, показанному на фиг.4, вторые рычаги 18, 18' соединены посредством третьего шатуна 20. Следовательно, можно исключить зубчатое колесо, ремень или цепь для соединения рычагов 18, 18', и требуется только один второй привод 62. Третий шатун 20 на фиг.5 использует те же оси, что и вторые шатуны 14, 14'.
Кроме того, первый привод 52, первый рычаг 16 и первый шатун 15 сдвинуты вправо в виде резального устройства 104, соответственно делая резальное устройство 105 более компактным. В данном примере, первый шатун 15 использует то же шарнирное соединение, что и второй шатун 14'. Однако первый шатун 15 может быть также прикреплен к раме 3 в другом положении.
Фиг.6 показывает другой вариант осуществления резального устройства 106, которое совершенно аналогично резальному устройству 105, показанному на фиг.5. В отличие от него, третий шатун 20 прикреплен к вторым рычагам 18, 18' на других осях, чем вторые шатуны 14, 14'. Поэтому вторые рычаги 18, 18' имеют L-образную форму. Однако можно также использовать разные рычаги для вторых шатунов 14, 14' и третьего шатуна 20.
На фиг.5 и 6 третий шатун 20 поворотно прикреплен к вторым рычагам 18, 18' на одинаковых радиусах. Это предпочтительно, не необязательно. Можно также прикреплять третий шатун 20 к вторым рычагам 18, 18' на разных радиусах, таким образом обусловливая разные углы вращения вторых рычагов 18, 18'. То же самое может быть достигнуто посредством зубчатого колеса, ремня или цепи. В случае резального устройства 104, вторые приводы 62, 62' могут приводиться в действие по-разному.
Необходимо отметить, что во всех примераз проволока 41 может быть заменена лезвием 42 и наоборот. Кроме того, во всех примерах диск 13 может быть заменен рычагом 16, 18, 18' и наоборот. Вообще во всех примерах вместо вращательного привода 52, 62, 62' может быть использован линейный привод 51, 61 и наоборот. В частности в связи с примерами, показанными на фиг.4-6, необходимо также отметить, что конкретное положение, ориентация и длина рычагов 16, 18, 18' и шатунов 14, 14', 15, 20, показанные в чертежах, являются только схематичными и примерными. Характер поведения конструкции может быть изменен посредством изменения положения, ориентации и/или длины рычагов 16, 18, 18' и шатунов 14, 14', 15, 20. Однако положение и ориентация рамы 3 могут быть сохранены. Например, вторые рычаги 18, 18' могут быть ориентированы вниз, а вторые шатуны 14, 14' могут быть сделаны короче.
Вообще высокие скорости и ускорения проволоки 41/лезвия 42 могут быть достигнуты посредством использования вращательных приводов 21, 52, 62, 62' (см. фиг.3-7). В зависимости от эксцентричности точек 19, 19' соединения сравнительно небольшое угловое перемещение вращательных приводов 21, 52, 62, 62' может вызывать сравнительно большое перемещение проволоки 41/лезвия 42. Следовательно, проволока 41/лезвие 42 может перемещаться с высокой скоростью. В частности, скорость перемещения проволоки 41 /лезвия 42 находится в пределах от 0,2 м/с до 0,7 м/с, а ее ускорение равно или меньше 65 м/с2.
Вообще предпочтительно, если траектория 10 перемещения проволоки 41 /лезвия 42 представляет собой замкнутую кривую. Это обеспечивает предпочтительное непрерывное перемещение (без остановок) проволоки 41/лезвия 42. Таким образом, могут быть достигнуты высокие скорости при только средних ускорениях.
Если рама 3 содержит две точки 17, 17' соединения, как это показано на фиг.4-6, то линейные направляющие могут быть исключены. Таким образом, можно уменьшить механический износ и соответственно риск загрязнения печенья 12 продуктами износа.
Фиг.7 показывает частичный вид сверху варианта осуществления с третьим приводом 21, соединенным с упомянутой проволокой 41 и вызывающим перемещение проволоки 41 в третьем направлении y, проходящим поперек первого направления х и поперек второго направления z. В частности третье направление y перпендикулярно первому направлению х и перпендикулярно второму направлению z, что предпочтительно, но необязательно. Конкретно, третий привод 21 соединен с балками 22 посредством четвертого шатуна 23. Балки 22 соединены вместе и подвижно закреплены на стойке 24. Вращение третьего привода 21 вызывает колебательное движение проволоки 41 в третьем направлении y. На фиг.7 показан вращательный двигатель 21. Однако вместо него может быть использован линейный двигатель. Конструкция, показанная на фиг.7, может быть использована в соединении с любым резальным устройством 101..106. Двигатель 21 может быть также соединен с блоком 9 управления, который при этом способен генерировать сигналы управления для трехмерной траектории 10 перемещения проволоки 41/лезвия 42. Однако двигатель 21 можно просто включать и выключать, по желанию, так что перемещение проволоки 41/лезвия 42 в направлении y не синхронизировано с перемещениями проволоки 41/лезвия 42 в направлении х и направлении z.
Вращательные приводы 21, 52, 62, 62' вообще способны перемещаться непрерывно в одном направлении с постоянной угловой скоростью или с изменяющейся скоростью во время одного оборота, управление которой осуществляется посредством блока 9 управления. Однако вращательные приводы 21, 52, 62, 62' могут также перемещаться возвратно-поступательно, чтобы вызывать перемещение проволоки 41/лезвия 42. В частности, эксцентричность точек 19, 19' соединения может быть очень большой по сравнению с длиной перемещения проволоки 41/лезвия 42.
Отмечается, что изобретение не ограничено вышеописанными вариантами осуществления, и возможны комбинации разных вариантов осуществления. В действительности, резальное устройство 101..106 может содержать больше или меньше деталей, чем показано в чертежах. Резальное устройство 101..106 и его детали могут быть также показаны в разных масштабах и могут быть больше или меньше, чем изображенные. Наконец, описание может содержать объект других независимых изобретений.
Перечень ссылочных позиций
101..106 резальное устройство
2 экструзионная машина для теста
3 рама
41 проволока
42 лезвие
51,52 первый привод
61,62,62' второй привод
7 каретка
8 основание
9 блок управления
10 траектория перемещения проволоки/лезвия
11 противень/поддон/лента
12 выпекаемое изделие
13 диск
14,14' вторые шатуны
15 первый шатун
16 первый поворотный рычаг
17,17' первые точки соединения
18,18' вторые поворотные рычаги
19,19' вторые точки соединения
20 третий шатун
21 третий привод
22 балка
23 четвертый шатун
24 стойка
x первое направление
y третье направление
z второе направление
Группа изобретений относится к пищевой промышленности, в частности к резальному устройству (101..106) экструзионной машины (2) для резания теста. Резальное устройство содержит подвижную раму (3), проволоку (41) или лезвие (42), закрепленное на упомянутой раме (3), и первый привод (51, 52), соединенный с упомянутой рамой (3), вызывающий перемещение рамы (3) в первом направлении (х). Резальное устройство (101..106) содержит также второй привод (61, 62, 62'), соединенный с упомянутой рамой (3), который вызывает перемещение рамы (3) во втором направлении (z), проходящем поперек первого направления (х). Второй привод (61, 62, 62') может быть приведен в действие независимо от упомянутого первого привода (51, 52). Кроме того, изобретение относится к способу резания теста посредством упомянутого резального устройства (101..106), в котором во время перемещения проволоки (41) / лезвия (42) первый привод (51, 52) и второй привод (61, 62, 62') приводят в действие одновременно. Использование группы изобретений позволит повысить качество получаемого продукта. 2 н. и 16 з.п. ф-лы, 7 ил.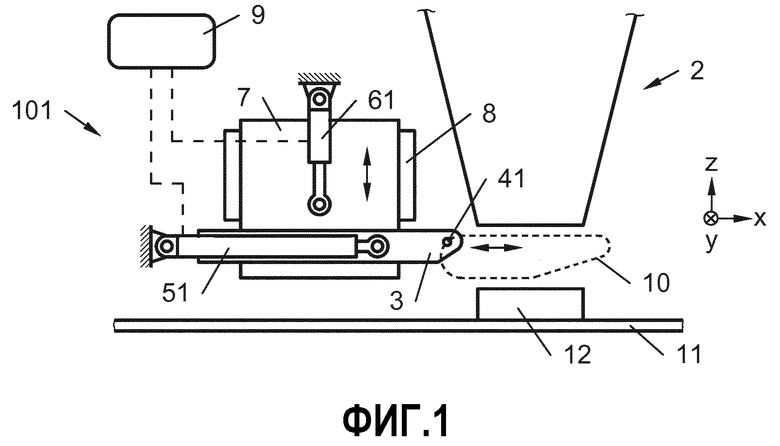
1. Резальное устройство (101..106) экструзионной машины (2) для теста, содержащее:
подвижную раму (3),
проволоку (41) или лезвие (42), закрепленное на упомянутой раме (3), и
первый привод (51, 52), соединенный с упомянутой рамой (3), вызывающий перемещение рамы (3) в первом направлении (х),
отличающееся тем, что содержит
второй привод (61, 62, 62'), соединенный с упомянутой рамой (3), который вызывает перемещение рамы (3) во втором направлении (z), проходящем поперек первого направления (х), и который может быть приведен в действие независимо от упомянутого первого привода (51, 52), и
блок (9) управления, соединенный с упомянутым первым приводом (51,52) и упомянутым вторым приводом (61, 62, 62') и выполненный с возможностью вычисления сигналов управления для данных приводов на основе заданной траектории (10) перемещения для проволоки (41) или лезвия (42).
2. Резальное устройство (101..106) по п. 1, отличающееся тем, что первое направление (х) и второе направление (z) по существу перпендикулярны друг другу.
3. Резальное устройство (101..106) по п. 2, отличающееся тем, что первый привод (51, 52) вызывает по существу горизонтальное перемещение рамы (3), а второй привод (61, 62, 62') вызывает по существу вертикальное перемещение рамы (3).
4. Резальное устройство (101..106) по любому из пп. 1-3, отличающееся тем, что содержит третий привод (21), соединенный с упомянутой проволокой (41) или лезвием (42) и вызывающий перемещение проволоки (41) / лезвия (42) в третьем направлении (y), проходящем поперек первого направления (х) и поперек второго направления (z).
5. Резальное устройство (101..106) по любому из пп. 1-4, отличающееся тем, что первый привод (51, 52) представляет собой первый линейный двигатель, и/или второй привод (61, 62, 62') представляет собой второй линейный двигатель, и/или третий привод (21) представляет собой третий линейный двигатель.
6. Резальное устройство (101..106) по любому из пп. 1-4, отличающееся тем, что первый привод (51, 52) представляет собой первый вращательный двигатель, и/или второй привод (61, 62, 62') представляет собой второй вращательный двигатель, и/или третий привод (21) представляет собой третий вращательный двигатель.
7. Резальное устройство (101..106) по любому из пп. 1-6, отличающееся тем, что упомянутая рама (3) установлена на каретке (7) посредством первой линейной рейки или направляющей, ориентированной в упомянутом первом направлении (х), и упомянутая каретка (7) установлена на основании (8) посредством второй линейной рейки или направляющей, ориентированной в упомянутом втором направлении (z), или наоборот.
8. Резальное устройство (101..106) по любому из пп. 1-7, отличающееся тем, что упомянутая рама (3) соединена с упомянутым первым приводом (51, 52) посредством первого шатуна (15) и с упомянутым вторым приводом (61, 62, 62') посредством второго шатуна (14, 14').
9. Резальное устройство (101..106) по п. 8, отличающееся тем, что первый конец первого шатуна (15) поворотно прикреплен к упомянутой раме (3), а второй конец первого шатуна (15) поворотно прикреплен к эксцентриковой точке первого поворотного диска или рычага (16), который выполнен с возможностью вращения посредством первого привода (51, 52).
10. Резальное устройство (101..106) по п. 8 или 9, отличающееся тем, что упомянутая рама (3) соединена с упомянутым вторым приводом (61, 62, 62') посредством двух параллельных вторых шатунов (14, 14'), причем первые концы вторых шатунов (14, 14') поворотно прикреплены к упомянутой раме (3) в первых точках (17, 17') соединения, расположенных на раме (3) на расстоянии, при этом вторые концы вторых шатунов (14, 14') поворотно прикреплены к эксцентриковым точкам вторых поворотных дисков или рычагов (18, 18') во вторых точках (19, 19') соединения.
11. Резальное устройство (101..106) по п. 10, отличающееся тем, что первые точки (17, 17') соединения и вторые точки (19, 19') соединения образуют углы виртуального параллелограмма и упомянутые поворотные диски или рычаги (18, 18') выполнены возможностью синхронного вращения посредством второго привода (61, 62, 62').
12. Резальное устройство (101..106) по п. 11, отличающееся тем, что упомянутые вторые диски/рычаги (18, 18') соединены посредством третьего шатуна (20), поворотно прикрепленного к эксцентриковым точкам вторых дисков/рычагов (18, 18') на одинаковых радиусах.
13. Резальное устройство (101..106) по любому из предыдущих пунктов, отличающееся тем, что на упомянутой раме (3) закреплена одна проволока (41) или одно лезвие (42).
14. Способ резания теста, выдаваемого экструзионной машиной (2), причем упомянутое резание осуществляется посредством резального устройства (101..106), содержащего подвижную раму (3), проволоку (41) или лезвие (42), закрепленное на упомянутой раме (3), причем при резании упомянутую проволоку (41) / лезвие (42) циклически перемещают вдоль траектории (10) перемещения, образующей замкнутую кривую, отличающийся тем, что
при перемещении проволоки (41) / лезвия (42) первый привод (51, 52), соединенный с упомянутой рамой (3), который вызывает перемещение рамы (3) в первом направлении (х), и второй привод (61, 62, 62'), соединенный с упомянутой рамой (3), который вызывает перемещение упомянутой рамы во втором направлении (z), проходящем поперек первого направления (х), и который может быть приведен в действие независимо от упомянутого первого привода (51, 52), приводят в действие одновременно.
15. Способ по п. 14, отличающийся тем, что траекторию (10) перемещения изменяют во время перемещения проволоки (41) / лезвия (42).
16. Способ по п. 14 или 15, отличающийся тем, что проволоку (41) / лезвие (42) непрерывно перемещают вдоль траектории (10) перемещения.
17. Способ по любому из пп. 14-16, отличающийся тем, что перемещение проволоки (41) / лезвия (42) осуществляют посредством вращательных двигателей (52, 62, 62', 21), которые перемещаются возвратно-поступательно.
18. Способ по любому из пп. 14-17, отличающийся тем, что скорость перемещения проволоки (41) / лезвия (42) находится в пределах от 0,2 м/с до 0,7 м/с и/или ее ускорение равно или меньше 65 м/с2.
| EP 0230368 A2, 29.07.1987 | |||
| Многооборотный разборный ящик | 1972 |
|
SU601194A1 |
| РЕЗАЛЬНОЕ УСТРОЙСТВО ДЛЯ ПОПЕРЕЧНОЙ РЕЗКИ, ПО МЕНЬШЕЙ МЕРЕ, ОДНОГО ПОЛОТНА РУЛОННОГО МАТЕРИАЛА | 2003 |
|
RU2283269C2 |
| КУДЕЛЕПРИГОТОВИТЕЛЬНАЯ МАШИНА | 1925 |
|
SU4017A1 |

