Область техники, к которой относится изобретение
Настоящее изобретение, в общем, относится к транспортным средствам и, более конкретно, способу, которым обеспечивается функционирование подножки транспортного средства, а также к компьютеру, выполняющему данный способ, транспортному средству, содержащему такой компьютер, и компьютерному программному продукту, воплощающему упомянутый способ.
Уровень техники
Транспортные средства могут включать в себя подножки, чтобы помогать посадке и высадке пользователей в салон транспортного средства. Подножка обеспечивает опору для пользователя, предоставляя возможность пользователю меньше поднимать свои ноги, чтобы садиться в салон транспортного средства. Подножка может разворачиваться, чтобы помогать посадке и высадке, когда транспортное средство является неподвижным, и подножка может убираться, когда транспортное средство находится в движении. Однако, если подножке не удается убраться, когда необходимо, топливная экономичность транспортного средства может подвергаться неблагоприятному воздействию. С другой стороны, если подножке не удается выдвинуться, когда необходимо, безопасность пользователя и/или удобство могут ухудшаться.
Так, в US2010/0194070 раскрыто транспортное средство, включающее в себя несколько дверей на одной стороне транспортного средства, систему подножек, актуатор и модуль управления. Система подножек выполнена с возможностью обеспечения доступа в транспортное средство и включает в себя первую подножку и вторую подножку. Первая подножка приспособлена для обеспечения возможности доступа в транспортное средство через переднюю дверь на упомянутой стороне транспортного средства, а вторая подножка приспособлена для обеспечения возможности доступа в транспортное средство через заднюю дверь на упомянутой стороне транспортного средства. Каждая из первой подножки и второй подножки является отдельно выдвигаемой при открывании передней двери или задней двери.
Сущность изобретения
Согласно одному аспекту, предложен способ, содержащий этапы, на которых: определяют первое значение топливной экономичности транспортного средства после выдвижения подножки; и определяют, что подножка является функционирующей, когда первое значение топливной экономичности ниже расчетного значения топливной экономичности транспортного средства, по меньшей мере, на первое предварительно определенное пороговое значение.
Способ может дополнительно содержать этап, на котором определяют второе значение топливной экономичности транспортного средства после выдвижения подножки. При этом, способ может также дополнительно содержать этап, на котором определяют, что подножка является функционирующей, когда второе значение топливной экономичности больше первого значения топливной экономичности, по меньшей мере, на второе предварительно определенное пороговое значение.
Способ может дополнительно содержать этап, на котором приводят в действие двигательную установку в однотопливном режиме, когда подножка выдвинута.
Способ может дополнительно содержать этап, на котором приводят в действие компонент транспортного средства при определении того, что подножка не является функционирующей.
Расчетное значение топливной экономичности транспортного средства может основываться на оценке топливной экономичности, определенной, когда подножка была ранее определена как функционирующая.
Способ может дополнительно содержать этап, на котором, перед началом предварительно определенного маршрута, идентифицируют участок маршрута, на котором необходимо выдвигать подножку. При этом, идентифицированный участок маршрута предпочтительно является практически прямым.
Способ может дополнительно содержать этап, на котором инструктируют подножке выдвигаться при идентификации отсутствия целевых транспортных средств в пределах порогового расстояния от транспортного средства.
Первое значение топливной экономичности может быть одним из скорости расхода жидкого топлива и скорости разряда аккумулятора.
Способ может дополнительно содержать этап, на котором определяют второе значение топливной экономичности транспортного средства после убирания подножки.
Способ может дополнительно содержать этап, на котором приводят в действие компонент транспортного средства при определении того, что подножка не является функционирующей.
Согласно другому аспекту, предложен компьютер, запрограммированный выполнять предложенный способ.
Согласно еще одному аспекту, предложено транспортное средство, содержащее предложенный компьютер.
Согласно еще одному аспекту, предложен компьютерный программный продукт, содержащий машиночитаемый носитель, хранящий инструкции, исполняемые процессором компьютера, чтобы выполнять предложенный способ.
Краткое описание чертежей
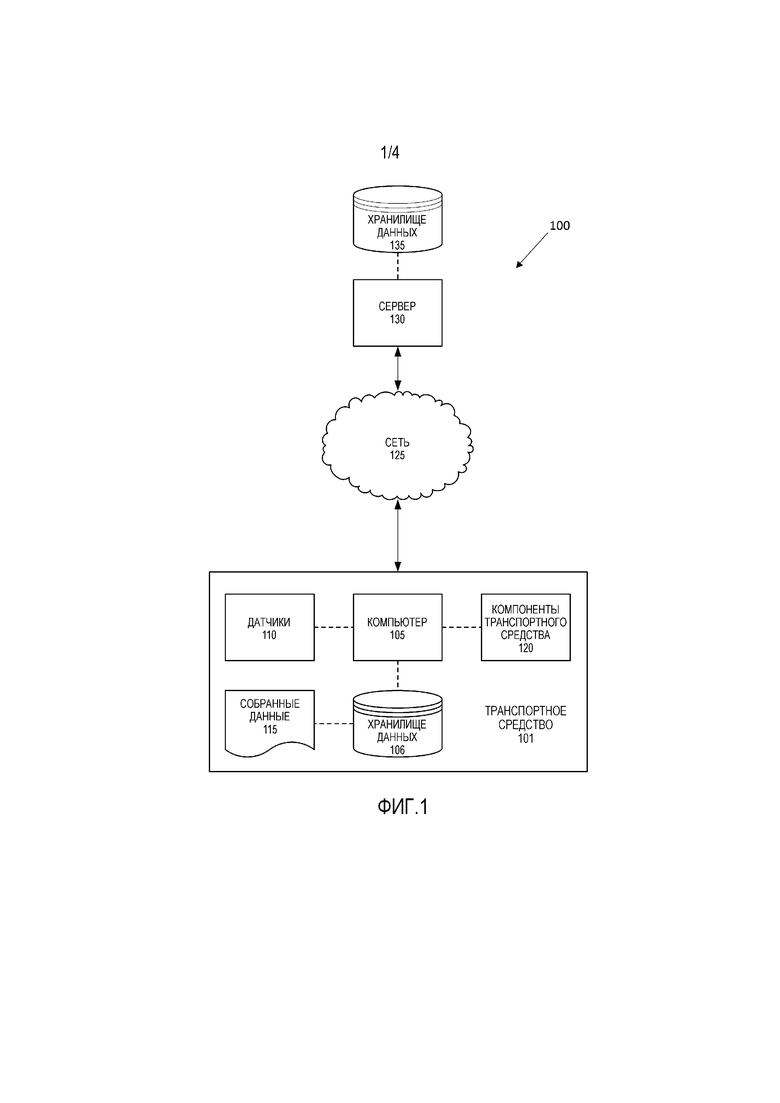
Фиг. 1 - блок-схема примерной системы для действия подножки в транспортном средстве.
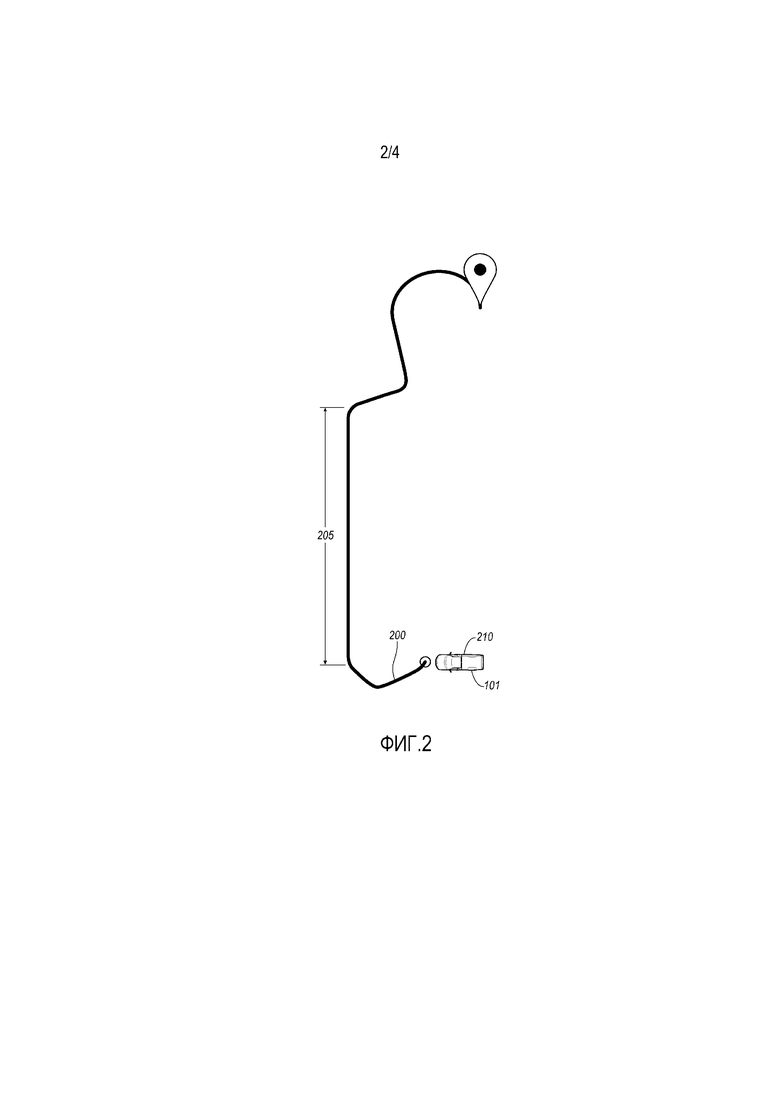
Фиг. 2 иллюстрирует примерный маршрут, по которому транспортное средство движется, чтобы определять работоспособность подножки.
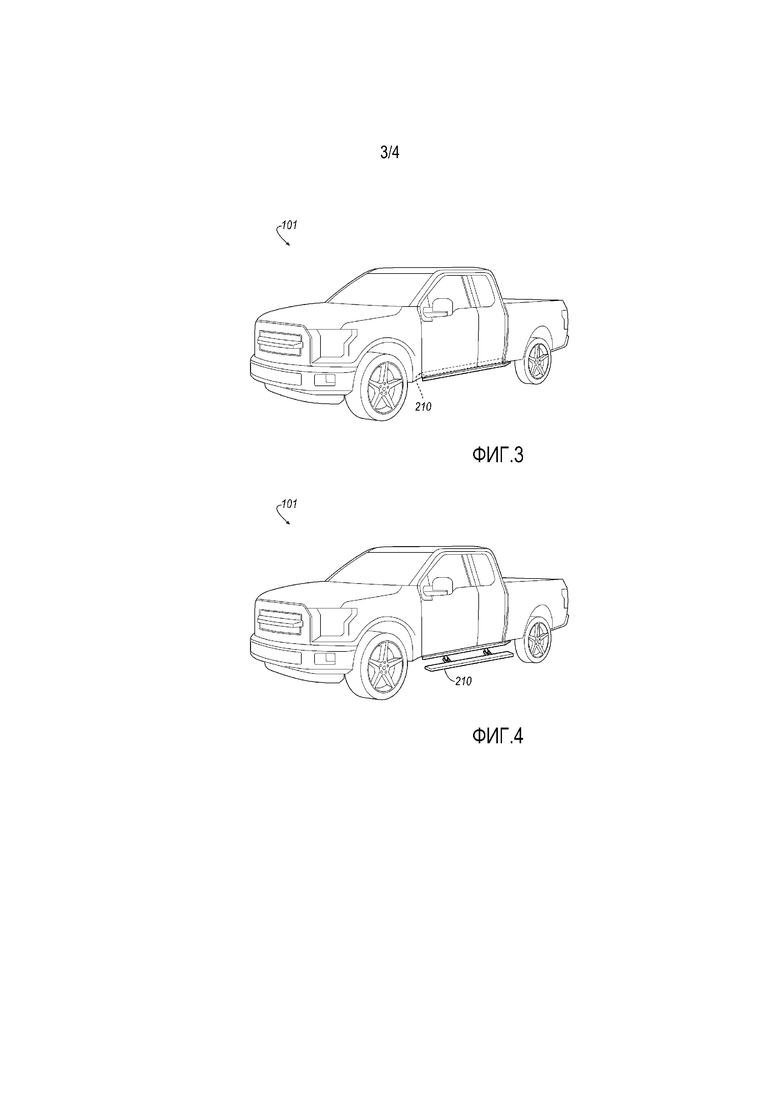
Фиг. 3 - вид транспортного средства с подножкой в сложенной позиции.
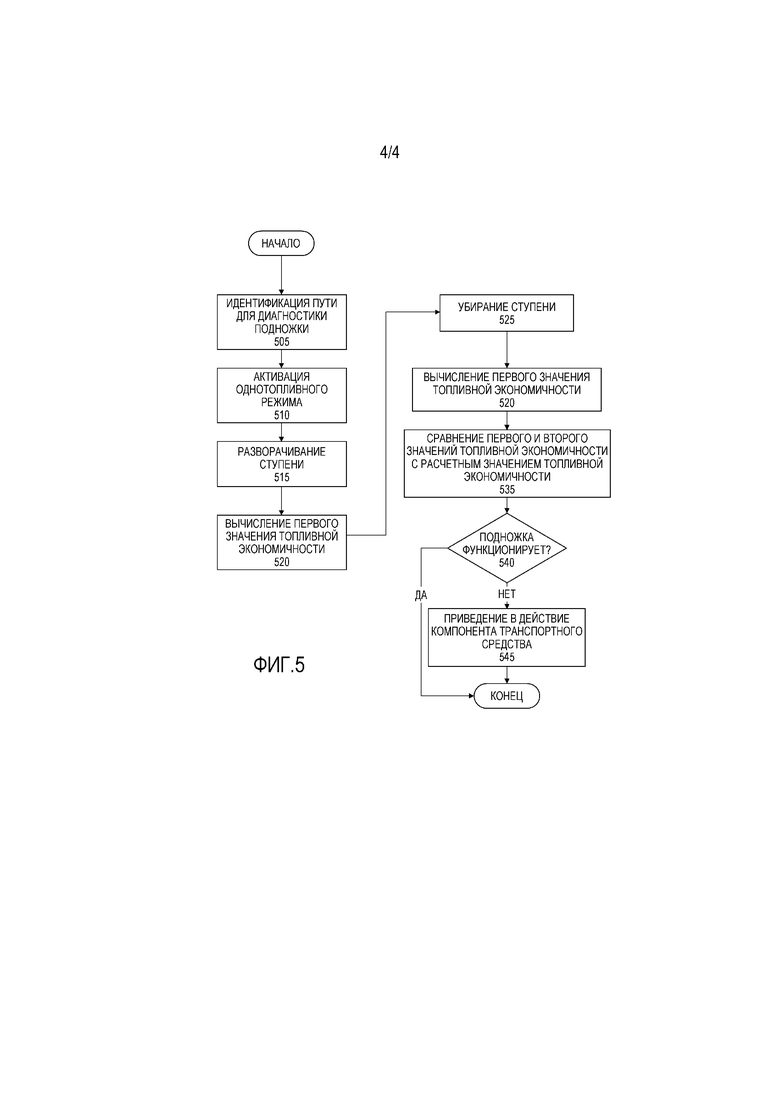
Фиг. 4 - вид транспортного средства с подножкой в развернутой позиции.
Фиг. 5 - блок-схема примерного процесса для приведения в действие подножки в транспортном средстве.
Подробное описание изобретения
Система включает в себя компьютер, запрограммированный определять первое значение топливной экономичности транспортного средства после выдвижения подножки и определять, что подножка является функционирующей, когда первое значение топливной экономичности ниже расчетного значения топливной экономичности транспортного средства, по меньшей мере, на первое предварительно определенное пороговое значение.
Компьютер может быть дополнительно запрограммирован определять второе значение топливной экономичности транспортного средства после убирания подножки. Компьютер может быть дополнительно запрограммирован, чтобы определять, что подножка является функционирующей, когда второе значение топливной экономичности больше первого значения топливной экономичности, по меньшей мере, на второе предварительно определенное пороговое значение.
Компьютер может быть дополнительно запрограммирован приводить в действие двигательную установку транспортного средства в однотопливном режиме, когда подножка выдвинута.
Компьютер может быть дополнительно запрограммирован задействовать компонент транспортного средства при определении того, что подножка является нефункционирующей.
Расчетное значение топливной экономичности транспортного средства может быть основано на оценке топливной экономичности, определенной, когда подножка была ранее определена как функционирующая.
Компьютер может быть дополнительно запрограммирован, чтобы, перед началом предварительно определенного маршрута, идентифицировать участок маршрута, на котором необходимо выдвигать подножку. Идентифицированный участок маршрута может быть практически прямым.
Компьютер может быть дополнительно запрограммирован, чтобы инструктировать подножке выдвигаться при идентификации отсутствия целевых транспортных средств в пределах порогового расстояния от транспортного средства.
Первое значение топливной экономичности может быть одним из скорости расхода жидкого топлива и скорости разряда аккумулятора.
Способ включает в себя определение первого значения топливной экономичности транспортного средства после выдвижения подножки и определение, что подножка является функционирующей, когда первое значение топливной экономичности ниже расчетного значения топливной экономичности транспортного средства, по меньшей мере, на первое предварительно определенное пороговое значение.
Способ может дополнительно включать в себя определение второго значения топливной экономичности транспортного средства после убирания подножки. Способ может дополнительно включать в себя определение того, что подножка является функционирующей, когда второе значение топливной экономичности больше первого значения топливной экономичности, по меньшей мере, на второе предварительно определенное пороговое значение.
Способ может дополнительно включать в себя приведение в действие двигательной установки транспортного средства в однотопливном режиме, когда подножка выдвинута.
Способ может дополнительно включать в себя приведение в действие компонента транспортного средства при определении, что подножка не является функционирующей.
В способе, расчетное значение топливной экономичности транспортного средства может быть основано на оценке топливной экономичности, определенной, когда подножка была ранее определена как функционирующая.
Способ может дополнительно включать в себя, перед началом предварительно определенного маршрута, идентификацию участка маршрута, на котором необходимо выдвигать подножку. Идентифицированный участок маршрута может быть практически прямым.
Способ может дополнительно включать в себя инструктирование подножке выдвигаться при идентификации отсутствия целевых транспортных средств в пределах порогового расстояния от транспортного средства.
В способе, первое значение топливной экономичности может быть одним из интенсивности расхода жидкого топлива и скорости разряда аккумулятора.
Фиг. 1 иллюстрирует систему 100 для определения того, является ли подножка 210 транспортного средства 101 функционирующей. Компьютер 105 в транспортном средстве 101 запрограммирован с возможностью принимать собранные данные 115 из одного или более датчиков 110. Например, данные 115 транспортного средства 101 могут включать в себя местоположение транспортного средства 101, местоположение цели и т.д. Данные местоположения могут иметь известную форму, например, геокоординат, к примеру, координат широты и долготы, полученных через навигационную систему, как известно, которая использует глобальную систему позиционирования (GPS). Дополнительно, примеры данных 115 могут включать в себя показатели измерений систем и компонентов транспортного средства 101, например, скорость транспортного средства 101, траекторию транспортного средства 101 и т.д.
Компьютер 105, как правило, программируется для связи по сети транспортного средства 101, например, включающей в себя шину связи, которая известна. Через сеть, шину и/или другие проводные или беспроводные механизмы (например, проводную или беспроводную локальную вычислительную сеть в транспортном средстве 101), компьютер 105 может передавать сообщения в различные устройства в транспортном средстве 101 и/или принимать сообщения из различных устройств, например, контроллеров, актуаторов, датчиков и т.д., включающих в себя датчики 110. Альтернативно или дополнительно, в случаях, если компьютер 105 фактически содержит несколько устройств, сеть транспортного средства может использоваться для связи между устройствами, представленными в качестве компьютера 105 в этом раскрытии сущности. Кроме того, компьютер 105 может быть запрограммирован для связи с сетью 125, которая, как описано ниже, может включать в себя различные проводные и/или беспроводные технологии сетевого взаимодействия, например, сотовые, Bluetooth, Bluetooth®, Bluetooth® Low Energy (BLE), проводные и/или беспроводные сети с коммутацией пакетов и т.д.
Хранилище 106 данных может быть любого известного типа, например, накопителями на жестких дисках, твердотельными накопителями, серверами или любыми энергозависимыми или энергонезависимыми носителями. Хранилище 106 данных может сохранять собранные данные 115, отправленные из датчиков 110.
Датчики 110 могут включать в себя множество устройств. Например, как известно, различные контроллеры в транспортном средстве 101 могут работать в качестве датчиков 110, чтобы предоставлять данные 115 через сеть или шину транспортного средства 101, например, данные 115, связанные со скоростью, ускорением, позицией транспортного средства, состоянием подсистемы и/или компонентов и т.д. Дополнительно, другие датчики 110 могут включать в себя камеры, детекторы движения и т.д., т.е. датчики 110, чтобы предоставлять данные 115 для оценки местоположения цели, проецирования пути цели, оценки местоположения полосы движения дороги и т.д. Датчики 110 также могут включать в себя радар ближнего действия, радар дальнего действия, лидар и/или ультразвуковые преобразователи.
Собранные данные 115 могут включать в себя множество данных, собранных в транспортном средстве 101. Примеры собранных данных 115 предоставляются выше, и кроме того, данные 115, в общем, собираются с использованием одного или более датчиков 110 и дополнительно могут включать в себе данные, вычисленные из них, в компьютере 105 и/или на сервере 130. В общем, собранные данные 115 могут включать в себя любые данные, которые могут собираться посредством датчиков 110 и/или вычисляться из таких данных.
Транспортное средство 101 может включать в себя множество компонентов 120 транспортного средства. При использовании в данном документе, каждый компонент 120 транспортного средства включает в себя один или более аппаратных компонентов, адаптированных с возможностью осуществлять механическую функцию или операцию, такую как движение транспортного средства, замедление или остановка транспортного средства, руление транспортным средством и т.д. Неограничивающие примеры компонентов 120 включают в себя компонент тяги (который включает в себя, например, двигатель внутреннего сгорания и/или электромотор и т.д.), компонент трансмиссии, компонент руления (например, который может включать в себя одно или более из руля, рулевой зубчатой рейки и т.д.), компонент торможения, компонент помощи при парковке, компонент адаптивной системы оптимального регулирования скорости, компонент адаптивного руления и т.п.
Система 100 дополнительно может включать в себя сеть 125, соединенную с сервером 130 и хранилищем 135 данных. Компьютер 105 дополнительно может быть запрограммирован с возможностью обмениваться данными с одним или более удаленных веб-узлов, к примеру, с сервером 130, через сеть 125, причем такой удаленный веб-узел, возможно, включает в себя хранилище 135 данных. Сеть 125 представляет один или более механизмов, посредством которых компьютер 105 транспортного средства может обмениваться данными с удаленным сервером 130. Соответственно, сеть 125 может представлять собой один или более различных механизмов проводной или беспроводной связи, включающих в себя любую требуемую комбинацию механизмов проводной (например, кабельной и волоконной) и/или беспроводной (например, сотовой, беспроводной, спутниковой, микроволновой и радиочастотной) связи и любую требуемую топологию сети (или топологии, когда используются несколько механизмов связи). Примерные сети связи включают в себя беспроводные сети связи (например, использующие Bluetooth®, BLE, IEEE 802.11, связь между транспортными средствами (V2V), такую как выделенная связь ближнего действия (DSRC) и т.д.), локальные вычислительные сети (LAN) и/или глобальные вычислительные сети (WAN), включающие в себя Интернет, предоставляющие услуги передачи данных.
Фиг. 2 иллюстрирует примерный маршрут 200, которому транспортное средство 101 следует. Маршрут 200 может быть предварительно определен компьютером 105 на основе пункта назначения, предоставленного оператором транспортного средства 101. Компьютер 105 может использовать известные способы определения маршрута, чтобы определять маршрут 200 от позиции транспортного средства 101 до пункта назначения.
Компьютер 105 может быть запрограммирован, чтобы определять фрагмент маршрута 200, чтобы измерять топливную экономичность транспортного средства 101, т.е. объем топлива, потребленного за пройденное расстояние, например, миль на галлон. Перед началом маршрута 200 компьютер 105 может собирать данные 115 о дорогах по маршруту 200. Компьютер 105 может идентифицировать участок маршрута 200, чтобы инструктировать подножке 210 выдвигаться. Участок маршрута 200 показан на фиг. 2 как путь 205. Как описано ниже, путь 205 может быть определен как фрагмент маршрута 200, где топливная экономичность может быть измерена так, что действия, которые могут изменять показатели топливной экономичности (например, дорожное движение, повороты, остановки дорожного движения и т.д.), отличные от позиции подножки 210, могут быть минимизированы.
Компьютер 105 может определять топливную экономичность транспортного средства 101. Топливная экономичность транспортного средства 101 может типично быть определена как количество энергии, расходуемой посредством продвижения вперед, разделенное на пройденное расстояние. Как описано выше, позиция подножки 210 может влиять на топливную экономичность, таким образом, когда транспортное средство 101 находится на участке маршрута 200, имеющем благоприятные условия, позиция подножки 210 может быть определена на основе топливной экономичности.
Топливная экономичность транспортного средства 101 может быть определена на основе потребления энергии для двигательной установки 120. Как описано выше, двигательная установка 120 может быть, например, двигателем внутреннего сгорания, электромотором, питаемым посредством аккумулятора, и/или гибридным сочетанием двигателя внутреннего сгорания и электромотора. Компьютер 105 может приводить в действие двигательную установку в однотопливном режиме, чтобы определять топливную экономичность. Т.е., когда двигательная установка 120 является гибридной двигательной установкой 120 из двигателя внутреннего сгорания/электромотора, компьютер 105 может приводить в действие двигательную установку 120 только для одного из двигателя внутреннего сгорания и питаемого аккумулятором электромотора, чтобы определять топливную экономичность. Т.е., топливная экономичность может основываться на одном из расхода жидкого топлива двигателя внутреннего сгорания (например, бензина, дизельного топлива, этанола, биобутанола, природного газа и т.д.) и скорости разряда аккумулятора для питаемого аккумулятором электромотора.
Компьютер 105 может определять топливную экономичность на основе длины пути 205 и топлива, израсходованного на участке пути 205. Как описано выше, путь 205 может быть определен как участок маршрута с одним или более благоприятными условиями, например, путь 205 является практически прямым, двигательная установка 120 "прогрета", т.е. была активна в течение более чем предварительно определенного периода времени (сохраненного в хранилище 106 данных и/или на сервере 130) после начала маршрута 200, путь 205 не имеет остановок дорожного движения, и т.д. Когда компьютер 105 приводит в действие двигательную установку 120 в режиме жидкого топлива, компьютер 105 может определять топливную экономичность посредством измерения объема жидкого топлива, израсходованного двигательной установкой, и деления израсходованного топлива на расстояние, пройденное по пути 205, в то же время измеряя расход топлива. Когда компьютер 105 приводит в действие двигательную установку 120 в полностью электрическом режиме, компьютер 105 может определять топливную экономичность посредством измерения величины электрического заряда, потраченного аккумулятором, и деления потраченного заряда на расстояние, пройденное по пути 205. Дополнительно, компьютер 105 может использовать известные коэффициенты пересчета электрического разряда в эквивалентные объемы топлива, чтобы определять топливную экономичность, например, 33,7 кВт/ч электричества=1 галлон бензина и т.д. Значение топливной экономичности может быть выражено как объем топлива (или пересчет эквивалента объема) на пройденное расстояние, например, миль на галлон (миль/гал). Первое значение топливной экономичности "выше" второго значения топливной экономичности, когда первое значение топливной экономичности больше второго значения топливной экономичности, например, 20 миль/гал больше 18 миль/гал. Аналогично, первое значение топливной экономичности "ниже" или "менее" второго значения топливной экономичности, когда первое значение топливной экономичности меньше второго значения топливной экономичности, например, 18 миль/гал ниже 20 миль/гал и 18 миль/гал менее 20 миль/гал.
Как описано выше, путь 205 может быть определен посредством идентификации участка маршрута 200, имеющего одно или более благоприятных условий для определения топливной экономичности. Топливная экономичность может быть подвержена влиянию множества сценариев вождения, например, буксировка прицепа, холодный двигатель, изменения в отметке высоты, агрессивное ускорение и замедление, нестандартные топливные смеси (например, 85% этанол) и т.д. Таким образом, благоприятные условия, которые определяют путь 205, могут быть определены на основе этих сценариев. Примерные благоприятные условия включают в себя, например, транспортное средство 101, небуксирующее прицеп, предварительно определенный период времени, прошедший, чтобы предоставлять возможность двигателю прогреваться, уклон дороги ниже порогового уклона дороги, уклон дороги, который не изменяется за пределы порогового изменения уклона дороги, установленное ограничение скорости, которое не изменяется на участке маршрута 200, отсутствие остановок дорожного движения на участке маршрута 200, единообразное дорожное движение на участке маршрута 200, и т.д. Компьютер 105 может идентифицировать путь 205 как участок маршрута 200, удовлетворяющий предварительно определенному числу таких благоприятных условий. Предварительно определенное число благоприятных условий может быть сохранено в хранилище 106 данных и/или на сервере 130.
Компьютер 105 может быть запрограммирован, чтобы инструктировать подножке 210 выдвигаться при идентификации отсутствия целевых транспортных средств 101 в пределах порогового расстояния от транспортного средства 101. Находясь на пути 205, другие транспортные средства 101, т.е. целевые транспортные средства 101, могут двигаться рядом с транспортным средством 101. Когда подножка 210 выдвигается, подножка 210 может сталкиваться с целевыми транспортными средствами 101. Чтобы предотвращать потенциальное столкновение, компьютер 105 может быть запрограммирован обнаруживать целевые транспортные средства 101, определять расстояние между транспортным средством 101 и целевыми транспортными средствами 101 и инструктировать подножке 210 выдвигаться, когда целевые транспортные средства 101 не находятся в пределах порогового расстояния от транспортного средства 101.
Подножка 210 может быть поворотно присоединена к шарниру транспортного средства 101 через актуатор (не показан), например, мотор. Например, когда актуатор является мотором, компьютер 105 может инструктировать мотору вращаться в первом направлении, чтобы выдвигать подножку 210, и вращаться во втором направлении, противоположном первому направлению, чтобы убирать подножку 210. Как показано на фиг. 3 и 4 ниже, подножка 210 может выдвигаться из сложенной позиции в развернутую позицию. Компьютер 105 может инструктировать актуатору выдвигать подножку 210 из сложенной позиции внутри шарнира транспортного средства 101 в развернутую позицию снаружи шарнира транспортного средства 101.
Компьютер 105 может быть запрограммирован инструктировать подножке 210 выдвигаться и определять первое значение топливной экономичности транспортного средства 101. Когда используются в данном документе, термины "первый" и "второй" формулируются не в качестве ограничений, а для удобства описания различных значений для топливной экономичности. Первое значение топливной экономичности может быть определено с помощью способов, описанных выше. Поскольку подножка 210 выдвинута, аэродинамическое сопротивление транспортного средства 101 увеличивается и первое значение топливной экономичности должно быть ниже показателя топливной экономичности, когда подножка 210 убрана.
Компьютер 105 может быть запрограммирован инструктировать подножке 210 убираться и определять второе значение топливной экономичности транспортного средства 101. После убирания подножки 210 аэродинамическое сопротивление транспортного средства 101 уменьшается, и топливная экономичность транспортного средства 101 должна увеличиваться соответственно. Компьютер 105 может сравнивать первое значение топливной экономичности, определенное, когда подножка 210 была выдвинута, со вторым значением топливной экономичности, определенным, когда подножка была убрана, чтобы определять, является ли подножка 210 функционирующей.
Когда используется в данном документе, подножка 210 является "функционирующей", когда компьютер 105 определяет, что подножка 210 находится в развернутой позиции после инструкции перемещаться в развернутую позицию, и что подножка 210 находится в сложенной позиции после инструкции перемещаться в сложенную позицию. Подножка 210 является "нефункционирующей", когда компьютер 105 определяет, по меньшей мере, одно из следующего: подножка 210 не находится в развернутой позиции после инструкции перемещаться в развернутую позицию, и подножка 210 не находится в сложенной позиции после инструкции перемещаться в сложенную позицию. Когда второе значение топливной экономичности больше топливной экономичности более чем на предварительно определенное пороговое значение топливной экономичности, компьютер 105 может определять, что подножка 210 успешно выдвигается и убирается. Предварительно определенное пороговое значение топливной экономичности может быть определено на основе оцененного изменения в топливной экономичности от повышенного аэродинамического сопротивления, создаваемого выдвижением подножки 210, например, 2 миль/гал. Когда значение топливной экономичности находится в пределах предварительно определенного порогового значения топливной экономичности для второго значения топливной экономичности, компьютер 105 может определять, что подножка 210 является нефункционирующей, например, подножке 210 не удается либо выдвигаться, либо убираться.
Компьютер 105 может быть запрограммирован задействовать компонент 120 транспортного средства при определении того, что подножка 210 является нефункционирующей. Например, компьютер 105 может отправлять сообщение по сети 125 владельцу транспортного средства 101, указывающее, что подножка 210 является нефункционирующей. В другом примере компьютер 105 может приводить в действие двигательную установку 120, чтобы перемещать транспортное средство 101 к месту ремонта, чтобы ремонтировать подножку 210. В другом примере компьютер 105 может идентифицировать место для парковки, которое находится дальше порогового расстояния (например, протяженность типичного пространства для парковки) от другого места для парковки, и перемещать транспортное средство 101 к идентифицированному месту для парковки.
Компьютер 105 может быть запрограммирован приводить в действие двигательную установку 120 в однотопливном режиме перед инструктированием подножке 210 выдвигаться. Когда транспортное средство 101 является гибридным электрическим транспортным средством 101, т.е. двигательная установка 120 включает в себя двигатель внутреннего сгорания и питаемый аккумулятором мотор, компьютер 105 может приводить в действие двигательную установку 120 с одним из двигателя внутреннего сгорания или питаемым аккумулятором мотором. Т.е., в однотопливном режиме двигательная установка 120 приводится в действие исключительно с двигателем внутреннего сгорания (потребляющим жидкое топливо), или с питаемым аккумулятором мотором (потребляющим электроэнергию от аккумулятора). Первое и второе значения топливной экономичности могут быть проще вычислены, когда компьютер 105 приводит в действие двигательную установку 120 в однотопливном режиме, поскольку только один тип топлива (жидкое или электричество) потребляется.
Фиг. 3 иллюстрирует транспортное средство 101 с подножкой 210 в сложенной позиции. Подножка 210 может быть вытянутой балкой, которая протягивается по длине транспортного средства 101. Подножка 210 может быть сложена под шарниром транспортного средства 101. Подножка 210 может быть в сложенной позиции, когда транспортное средство 101 движется по маршруту 200. Т.е., подножка 210 может быть использована, чтобы помогать пассажирам, садящимся в салон транспортного средства 101, и, таким образом, может быть сложена, в то время как транспортное средство 101 движется. Кроме того, когда подножка 210 находится в сложенной позиции, суммарное аэродинамическое сопротивление транспортного средства 101 может быть уменьшено и топливная экономичность транспортного средства 101 может увеличиваться.
Фиг. 4 иллюстрирует транспортное средство 101 с подножкой 210 в развернутой позиции. Когда подножка 210 находится в развернутой позиции и транспортное средство 101 не движется, пассажиры могут вставать на подножку 210, чтобы опираться при посадке в транспортное средство 101. Когда подножка 210 находится в развернутой позиции и транспортное средство 101 движется, повышенное аэродинамическое сопротивление может уменьшать топливную экономичность транспортного средства 101.
На основе первого и второго значений топливной экономичности, измеренных когда подножка 210 находится в развернутой позиции и сложенной позиции, компьютер 105 может определять, является ли подножка 210 функционирующей. Хранилище 106 данных и/или сервер 130 может хранить расчетное значение топливной экономичности для транспортного средства 101. Расчетная топливная экономичность может основываться, например, на ранее определенной оценке для топливной экономичности, определенной производителем оценке топливной экономичности, сохраненной оценке топливной экономичности, определенной, когда подножка 210 была ранее определена как функционирующая, и т.д. Компьютер 105 может сравнивать первое и второе значения топливной экономичности, определенные когда подножка 210 была в развернутой и сложенной позициях, с предварительно определенным значением топливной экономичности, чтобы определять, является ли подножка 210 функционирующей. Например, если первое значение топливной экономичности (определенное, когда подножка 210 находится в развернутой позиции) меньше расчетного значения топливной экономичности более чем на предварительно определенное пороговое значение, компьютер 105 может определять, что подножка 210 правильно находится в развернутой позиции. Предварительно определенное пороговое значение может быть определено на основе, например, известных моделей топливной экономичности и/или предыдущих измерений и сохраненных в хранилище 106 данных и/или на сервере 130. Например, расчетное значение топливной экономичности транспортного средства 101 может быть 20 миль на галлон (миль/гал), и когда подножка 210 находится в развернутой позиции, повышенное аэродинамическое сопротивление может уменьшать топливную экономичность приблизительно на 10%. Предварительно определенное пороговое значение может, таким образом, быть 2 миль/гал. Кроме того, если второе значение топливной экономичности (определенное, когда подножка 210 находится в сложенной позиции), находится в пределах порогового значения для расчетного значения топливной экономичности, компьютер 105 может определять, что подножка 210 правильно находится в сложенной позиции. Когда компьютер 105 определяет, что подножка 210 была правильно в сложенной и развернутой позициях, компьютер 105 может определять, что подножка 210 является функционирующей. Иначе, компьютер 105 может определять, что подножка является нефункционирующей.
Фиг. 5 иллюстрирует примерный процесс 500 для определения того, является ли подножка 210 функционирующей. Процесс 500 начинается на этапе 505, на котором компьютер 105 идентифицирует путь 205 для выполнения диагностики подножки 210. Как описано выше, путь 205 может быть определен на маршруте 200 перед началом маршрута 200. Путь 205 может быть определен на основе идентифицированных благоприятных условий, например, практически прямая дорога, от небольшого до отсутствия движения транспорта и т.д.
Далее, на этапе 510, компьютер 105 активирует однотопливный режим для двигательной установки 120. Как описано выше, компьютер 105 может определять топливную экономичность транспортного средства 101 более легко, когда двигательная установка 120 работает в однотопливном режиме, т.е. только на жидком топливе или только получая питание посредством электрического аккумулятора.
Далее, на этапе 515, компьютер 105 разворачивает подножку 210 в развернутую позицию. Как описано выше, вследствие сопротивления на подножке 210, топливная экономичность транспортного средства 101 типично падает, когда подножка 210 находится в развернутой позиции.
Далее, на этапе 520, компьютер 105 вычисляет первое значение топливной экономичности. Как описано выше, компьютер 105 может измерять объем израсходованного топлива и/или величину разряда аккумулятора в течение предварительно определенного отрезка на пути 205.
Далее, на этапе 525, компьютер 105 убирает подножку 210 в сложенную позицию. Как описано выше, когда подножка 210 является функционирующей, первое значение топливной экономичности, определенное, когда подножка 210 находится в сложенной позиции, ожидается большим, чем второе значение топливной экономичности, определенное, когда подножка 210 находится в развернутой позиции. Например, первое значение топливной экономичности может быть приблизительно 20 миль/гал, а второе значение топливной экономичности может быть приблизительно 18 миль/гал.
Далее, на этапе 530, компьютер 105 вычисляет второе значение топливной экономичности. Компьютер 105 может определять второе значение топливной экономичности транспортного средства 101, когда подножка 210 находится в сложенной позиции.
Далее, на этапе 535, компьютер 105 сравнивает первое и второе значения топливной экономичности с расчетным значением топливной экономичности, таким как описанное выше. Расчетное значение топливной экономичности может быть сохранено в хранилище 106 данных и/или на сервере 130. Расчетное значение топливной экономичности может быть определено на основе предыдущих измерений топливной экономичности и/или стандартизированного значения топливной экономичности для марки и модели транспортного средства 101. Т.е. расчетное значение топливной экономичности может представлять топливную экономичность транспортного средства 101, когда подножка 210 является функционирующей и находится в сложенной позиции.
Далее, на этапе 540, компьютер 105 определяет, является ли подножка 210 функционирующей, на основе сравнения первого и второго значений топливной экономичности и расчетного значения топливной экономичности. Например, если первое значение топливной экономичности (определенное, когда подножка 210 находится в развернутой позиции) меньше расчетного значения топливной экономичности более чем на предварительно определенное пороговое значение, компьютер 105 может определять, что подножка 210 правильно находится в развернутой позиции. Кроме того, если второе значение топливной экономичности (определенное, когда подножка 210 находится в сложенной позиции), находится в пределах порогового значения для расчетного значения топливной экономичности, компьютер 105 может определять, что подножка 210 правильно находится в сложенной позиции. Когда компьютер 105 определяет, что, на основе значений топливной экономичности, подножка 210 была правильно в развернутой и сложенной позициях, компьютер 105 может определять, что подножка 210 является функционирующей. Когда компьютер 105 определяет, что подножка 210 является функционирующей, процесс 500 заканчивается. Иначе, процесс 500 продолжается на этапе 545.
На этапе 545 компьютер 105 приводит в действие один или более компонентов 120 транспортного средства. Например, компьютер 105 может отправлять сообщение по сети 125 владельцу транспортного средства 101, приводить в действие двигательную установку 120, чтобы перемещать транспортное средство 101 к месту ремонта, идентифицировать незанятое место для парковки, которое находится дальше порогового расстояния от другого занятого места для парковки и т.д. Компьютер 105 может осуществлять доступ к информации, хранящейся в хранилище 106 данных и/или на сервере 130, например, для контактной информации владельца, данных 115 о местоположении мест ремонта и т.д. Компьютер 105 может, после въезда на площадку для парковки, приводить в действие один или более датчиков 110 (например, камер), чтобы идентифицировать незанятое место для парковки, которое находится дальше порогового расстояния от другого места для парковки, где припарковано другое транспортное средство 101. После этапа 545, процесс 500 завершается.
Когда используется в данном документе, наречие "практически", преобразующее прилагательное, означает, что форма, структура, показатель, значение, вычисление и т.д. может отклоняться от точно описанной геометрии, расстояния, показателя, значения, вычисления и т.д. вследствие несовершенств в материалах, механической обработке, производстве, показателях модуля сбора данных, вычислениях, времени обработки, времени связи и т.д.
Каждый из компьютеров 105, как правило, включает в себя инструкции, исполняемые одним или более компьютерами, такими как идентифицированные выше, и для выполнения блоков или этапов процессов, описанных выше. Машиноисполняемые инструкции могут быть компилированы или интерпретированы из компьютерных программ, созданных с использованием множества языков и/или технологий программирования, включающих в себя, без ограничения и отдельно или в комбинации, Java™, C, C++, Visual Basic, Java Script, Perl, HTML и т.д. В общем, процессор (например, микропроцессор) принимает инструкции, например, из памяти, машиночитаемого носителя и т.д. и выполняет эти инструкции, за счет этого выполняя один или более процессов, включающих в себя один или более процессов, описанных в данном документе. Такие инструкции и другие данные могут быть сохранены и передаваться с помощью множества компьютерно-читаемых носителей. Файл в компьютере 105, в целом, является совокупностью данных, сохраненных на компьютерно-читаемом носителе, таком как носитель хранения, оперативное запоминающее устройство и т.д.
Компьютерно-читаемый носитель включает в себя любой носитель, который участвует в предоставлении данных (например, инструкций), который может быть считан посредством компьютера. Такой носитель может принимать множество форм, включающих в себя, но не только, энергонезависимые носители, энергозависимые носители и т.д. Энергонезависимые носители включают в себя, например, оптические или магнитные диски и другое постоянное запоминающее устройство. Энергозависимые носители включают в себя, например, динамическое оперативное запоминающее устройство (DRAM), которое типично составляет основную память. Обычные формы компьютерно-читаемых носителей включают в себя, например, гибкий диск, дискету, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM, DVD, любой другой оптический носитель, перфорационную карту, бумажную ленту, любой другой физический носитель с рисунками отверстий, RAM, PROM, EPROM, FLASH-EEPROM, любую другую микросхему памяти или картридж, или любой другой носитель, с которого компьютер может выполнять считывание.
Что касается носителей, процессов, систем, способов и т.д., описанных в данном документе, должно быть понятно, что, хотя этапы таких процессов и т.д. были описаны как происходящие согласно некой упорядоченной последовательности, такие процессы могут быть применены на практике с помощью описанных этапов, выполняемых в порядке, отличном от порядка, описанного в данном документе. Дополнительно должно быть понятно, что некоторые этапы могут выполняться одновременно, что другие этапы могут быть добавлены, или что некоторые этапы, описанные в данном документе, могут быть опущены. Например, в процессе 500, один или более этапов могут пропускаться, или этапы могут выполняться в порядке, отличном от порядка, показанного на фиг. 5. Другими словами, описания систем и/или процессов в данном документе предоставляются в целях иллюстрации конкретных вариантов осуществления и никоим образом не должны истолковываться так, чтобы ограничивать раскрытый предмет изобретения.
Соответственно, следует понимать, что настоящее раскрытие, включающее в себя вышеприведенное описание и прилагаемые чертежи и нижеприведенную формулу изобретения, имеет намерение быть иллюстративным, а не ограничивающим. Множество вариантов осуществления и вариантов применения, отличных от предоставленных примеров, должны быть очевидными для специалистов в данной области техники после прочтения вышеприведенного описания. Рамки изобретения должны быть определены, не со ссылкой на вышеприведенное описание, а вместо этого должны быть определены со ссылкой на формулу изобретения, приложенную к нему и/или включенную в непредварительную патентную заявку, основанную на данном описании, вместе с полными рамками эквивалентов, к которым такие пункты формулы изобретения приписаны. Ожидается и предполагается, что будущие разработки произойдут в технологиях, обсужденных в данном документе, и что раскрытые системы и способы будут включены в такие будущие варианты осуществления. В общем, следует понимать, что раскрытый предмет изобретения допускает модификацию и варьирование.
Упоминание существительного в единственном числе должно пониматься как означающее одно или более, если не указано иное или контекст не требует иного. Фраза "на основе" охватывает частично или полностью на основе.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ШТОРКОЙ РЕШЕТКИ РАДИАТОРА | 2017 |
|
RU2689911C2 |
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ | 2015 |
|
RU2706859C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ПРЕДУПРЕЖДЕНИЯ О ПРИБЛИЖЕНИИ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2687395C2 |
| СИСТЕМА И СПОСОБ УМЕНЬШЕНИЯ ПОСЛЕДСТВИЙ И ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ | 2018 |
|
RU2715601C2 |
| ОБНАРУЖЕНИЕ НАПРАВЛЕНИЯ ПОЛОСЫ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2711031C2 |
| СИСТЕМА ДИАГНОСТИКИ ШИНЫ | 2018 |
|
RU2686271C1 |
| ЗАРЯД ЭЛЕКТРОТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2709153C2 |
| ИЗБЕГАНИЕ УДАРА В ДНИЩЕ КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2707485C2 |
| СИСТЕМА И СПОСОБ ДЛЯ УЛУЧШЕННОГО ОБНАРУЖЕНИЯ ПОВЕДЕНИЯ В ПРЕДЕЛАХ ПОЛОСЫ ДВИЖЕНИЯ | 2015 |
|
RU2710125C2 |
| УЛУЧШЕННАЯ РАБОТА СЕНСОРНОГО ЭКРАНА | 2015 |
|
RU2696978C1 |
Изобретение относится к системе и способу функционирования подножки транспортного средства. Система функционирования подножки транспортного средства содержит компьютер, включающий в себя процессор и запоминающее устройство, хранящее инструкции, исполняемые процессором. Инструкции, исполняемые процессором, приводят в действие двигательную установку транспортного средства в однотопливном режиме, когда подножка выдвинута, определяют первое значение топливной экономичности транспортного средства после выдвижения подножки и определяют, что подножка является функционирующей, когда первое значение топливной экономичности ниже расчетного значения топливной экономичности транспортного средства по меньшей мере на первое предварительно определенное пороговое значение. Достигается повышение экономичности управления транспортным средством. 4 н. и 16 з.п. ф-лы. 5 ил.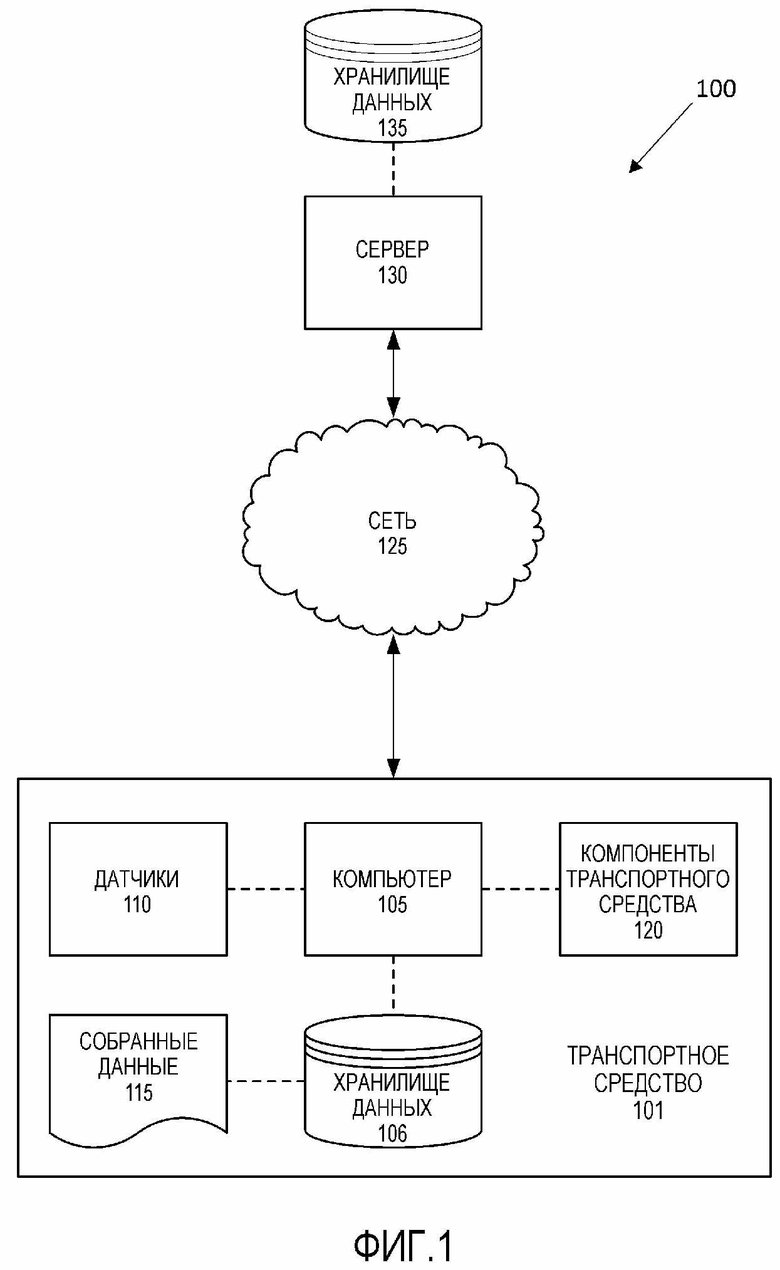
1. Система функционирования подножки транспортного средства, содержащая компьютер, включающий в себя процессор и запоминающее устройство, хранящее инструкции, исполняемые процессором, чтобы:
приводить в действие двигательную установку транспортного средства в однотопливном режиме, когда подножка выдвинута;
определять первое значение топливной экономичности транспортного средства после выдвижения подножки; и
определять, что подножка является функционирующей, когда первое значение топливной экономичности ниже расчетного значения топливной экономичности транспортного средства по меньшей мере на первое предварительно определенное пороговое значение.
2. Система по п. 1, в которой инструкции также включают в себя инструкции, чтобы определять второе значение топливной экономичности транспортного средства после выдвижения подножки.
3. Система по п. 2, в которой инструкции также включают в себя инструкции, чтобы определять, что подножка является функционирующей, когда второе значение топливной экономичности больше первого значения топливной экономичности по меньшей мере на второе предварительно определенное пороговое значение.
4. Система по п. 1, в которой инструкции также включают в себя инструкции, чтобы приводить в действие компонент транспортного средства при определении того, что подножка не является функционирующей.
5. Система по п. 1, в которой расчетное значение топливной экономичности транспортного средства основывается на оценке топливной экономичности, определенной, когда подножка была ранее определена как функционирующая.
6. Система по п. 1, в которой инструкции также включают в себя инструкции, чтобы, перед началом предварительно определенного маршрута, идентифицировать участок маршрута, на котором необходимо выдвигать подножку.
7. Система по п. 6, в которой идентифицированный участок маршрута является практически прямым.
8. Система по п. 1, в которой инструкции также включают в себя инструкции, чтобы инструктировать подножке выдвигаться при идентификации отсутствия целевых транспортных средств в пределах порогового расстояния от транспортного средства.
9. Система по п. 1, в которой первое значение топливной экономичности является одним из скорости расхода жидкого топлива и скорости разряда аккумулятора.
10. Способ функционирования подножки транспортного средства, содержащий этапы, на которых:
приводят в действие двигательную установку транспортного средства в однотопливном режиме, когда подножка выдвинута;
определяют первое значение топливной экономичности транспортного средства после выдвижения подножки; и
определяют, что подножка является функционирующей, когда первое значение топливной экономичности ниже расчетного значения топливной экономичности транспортного средства по меньшей мере на первое предварительно определенное пороговое значение.
11. Способ по п. 10, содержащий также этап, на котором определяют второе значение топливной экономичности транспортного средства после выдвижения подножки.
12. Способ по п. 11, содержащий также этап, на котором определяют, что подножка является функционирующей, когда второе значение топливной экономичности больше первого значения топливной экономичности по меньшей мере на второе предварительно определенное пороговое значение.
13. Способ по п. 10, содержащий также этап, на котором приводят в действие компонент транспортного средства при определении того, что подножка не является функционирующей.
14. Способ по п. 10, в котором расчетное значение топливной экономичности транспортного средства основывается на оценке топливной экономичности, определенной, когда подножка была ранее определена как функционирующая.
15. Способ по п. 10, содержащий также этап, на котором, перед началом предварительно определенного маршрута, идентифицируют участок маршрута, на котором необходимо выдвигать подножку.
16. Способ по п. 15, в котором идентифицированный участок маршрута является практически прямым.
17. Способ по п. 10, содержащий также этап, на котором инструктируют подножке выдвигаться при идентификации отсутствия целевых транспортных средств в пределах порогового расстояния от транспортного средства.
18. Способ по п. 10, в котором первое значение топливной экономичности является одним из скорости расхода жидкого топлива и скорости разряда аккумулятора.
19. Система функционирования подножки транспортного средства, содержащая компьютер, включающий в себя процессор и запоминающее устройство, хранящее инструкции, исполняемые процессором, чтобы:
определять первое значение топливной экономичности транспортного средства после выдвижения подножки;
определять, что подножка является функционирующей, когда первое значение топливной экономичности ниже расчетного значения топливной экономичности транспортного средства по меньшей мере на первое предварительно определенное пороговое значение; и
приводить в действие компонент транспортного средства при определении того, что подножка не является функционирующей.
20. Способ функционирования подножки транспортного средства, содержащий этапы, на которых:
определяют первое значение топливной экономичности транспортного средства после выдвижения подножки;
определяют, что подножка является функционирующей, когда первое значение топливной экономичности ниже расчетного значения топливной экономичности транспортного средства по меньшей мере на первое предварительно определенное пороговое значение; и
приводят в действие компонент транспортного средства при определении того, что подножка не является функционирующей.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Автоматический фрикционный аппарат для врубовых машин системы "Сулливан" типа ОZЕ | 1932 |
|
SU34484A1 |

