Изобретение относится к области приборостроения и может быть использовано для управления движением летательных аппаратов.
Из уровня техники известен способ стабилизации заданной скорости полета (Патент РФ №2455201, МПК B64D 43/02, опубл. 10.07.2012) включающий определение заданной скорости полета, измерение оборотов двигателей, продольной перегрузки, угла наклона траектории, скорости полета, отличающийся тем, что по разности между заданной и фактической скоростями полета, разности между продольной перегрузкой и синусом угла наклона траектории определяют расчетные обороты двигателей для заданной скорости, определяют изменения оборотов каждого двигателя, для чего измеряют величину отклонения рычагов управления двигателями от их среднего положения, определяемого методом «скользящего среднего» за время, соответствующее времени изменения оборотов с задержкой, соответствующей времени задержки изменения оборотов при перемещении рычага управления двигателем, формируют сигнал рассогласования между расчетными оборотами и фактическими оборотами каждого двигателя, который индицируют в виде метки избытка оборотов, перемещающейся относительно метки отсчета, стабилизацию заданной скорости полета осуществляют перемещая или удерживая рычаг управления двигателем так, чтобы метка избытка оборотов располагалась у метки отсчета.
Основным недостатком известного способа является реализация способа управления скоростью полета только посредством изменения тяги двигателей без возможности использования вспомогательных управляющих сигналов, т.е. отсутствие возможности перераспределения функции стабилизации и управления скоростью полета между силой тяги двигателей и силой лобового сопротивления самолета.
Также из уровня техники известен способ управления полетом самолета (Патент РФ №2249540, МПК В64С 13/18, опубл. 10.04.2005), согласно которому управление скоростью полета и углом наклона траектории осуществляют в соответствии с алгоритмом, синтезирующим величины отклонения рукоятки сектора газа и нормальной перегрузки с учетом ограничения по тяге и параметрам движения самолета при использовании всех органов управления самолета, необходимых для реализации допустимых траекторий полета и работающих синхронно, причем, если при выполнении маневра для поддержания заданной скорости полета тяги не хватает или она избыточна, корректируют величину угла наклона траектории, исходя из условий функционирования контура управления скоростью.
Основным недостатком известного способа является отсутствие возможности сохранения заданной скорости и траектории полета при отсутствии избытка тяги или необходимость управления скоростью полета посредством изменения угла наклона траектории.
В качестве прототипа заявителем выбран известный способ управления двухдвигательным самолетом (Патент РФ №2392186, МПК В64С 15/00, опубл. 20.06.2010), согласно которому при управлении двухдвигательным самолетом управляющие сигналы с поста управления летчика поступают на аэродинамические органы управления самолета и газодинамические органы, представляющие собой регулируемые сопла, которые обеспечивают отклонение вектора тяги, при этом управляющие сигналы разделяют на два тракта: тракт дистанционного управления аэродинамическими органами и тракт отклонения вектора тяги, и подают в вычислительную систему, разделенную на две функциональные вычислительные подсистемы: основную и дополняющую, при этом последнюю включают в работу при малых скоростях полета и больших углах атаки.
Основным недостатком прототипа является отсутствие возможности управлять скоростью полета без изменения угла наклона траектории.
Задачей изобретения является создание способа управления скоростью полета самолетом с учетом стабилизации скорости, который позволяет:
- реализовать дополнительную возможность защиты от выхода самолета за верхние ограничения по скорости (функция аэродинамического торможения при разгоне самолета с двигателями, работающими на малом газе), за счет чего повышается уровень безопасности полетов самолетов с электродистанционными системами управления (ЭДСУ);
- повысить экономичность эксплуатации самолетов по расходу топлива, дальность и продолжительность полета, за счет перераспределения функции стабилизации заданной скорости полета самолета между автоматом тяги и секциями интерцепторов;
- расширить диапазон вертикальных скоростей снижения при различных заданных значениях приборной скорости;
- повысить точность стабилизации и отслеживания заданной приборной скорости;
- расширить область ожидаемых условий эксплуатации и уровень безопасности полетов путем реализации дополнительной возможности минимизации ошибки по скорости совместно с автоматом тяги при полете в условиях воздействия атмосферных явлений повышенной опасности (сильные вертикальные сдвиги ветра и т.п.).
Технический результат, на достижение которого направлено заявляемое изобретение, заключается в расширении функциональных возможностей и повышении эксплуатационных характеристик самолета.
Заявленный технический результат в предлагаемом способе управления скоростью полета самолета с учетом стабилизации скорости достигается тем, что используются основной управляющий сигнал, поступающий на привод тяги двигателей, а также дополнительный управляющий сигнал, поступающий на привод секций интерцепторов, условие подключения которого определяется заданной величиной разницы между текущей и заданной приборной скоростью, которая может задаваться пилотом с пульта управления или автоматически при решении оптимизационных задач и выбирается из условия потребной величины долевого участия интерцепторов в решении задачи стабилизации и отслеживания заданной приборной скорости совместно с управлением тягой двигателей таким образом, что вспомогательный управляющий сигнал на выпуск секций интерцепторов формируется при условии:

где:
Vпр - текущее значение приборной скорости;
Vпр зад - заданная на пульте управления САУ приборная скорость,
причем величина угла отклонения интерцепторов δинт определяется в соответствии с условием:

где:
 - коэффициент усиления реакции на рассогласование между текущей и заданной приборной скоростью;
- коэффициент усиления реакции на рассогласование между текущей и заданной приборной скоростью;
 заданная величина разницы между текущей и заданной приборной скоростью, являющаяся порогом подключения вспомогательного сигнала на привод интерцепторов;
заданная величина разницы между текущей и заданной приборной скоростью, являющаяся порогом подключения вспомогательного сигнала на привод интерцепторов;
 - скорость изменения фильтрованной приборной скорости;
- скорость изменения фильтрованной приборной скорости;
 - коэффициент усиления реакции на скорость изменения фильтрованной приборной скорости;
- коэффициент усиления реакции на скорость изменения фильтрованной приборной скорости;
 - коэффициент усиления интегральной части управляющего сигнала;
- коэффициент усиления интегральной части управляющего сигнала;
p - оператор Лапласа;
Т - постоянная времени;
 - фильтрованное значение приборной скорости,
- фильтрованное значение приборной скорости,
при этом управляющий сигнал на полную уборку секций интерцепторов формируется при условии:

либо при условии:
Vпр - Vпр зад <0,
где:
Kпор - заданная величина понижающего коэффициента для определения минимальной допустимой ошибки по скорости полета без использования вспомогательного сигнала на секции интерцепторов;
 - заданная величина изменения приборной скорости для завершения формирования вспомогательного сигнала на привод секций интерцепторов,
- заданная величина изменения приборной скорости для завершения формирования вспомогательного сигнала на привод секций интерцепторов,
причем при несоблюдении любого из упомянутых условий подключения вспомогательного сигнала положение интерцепторов остается неизменным.
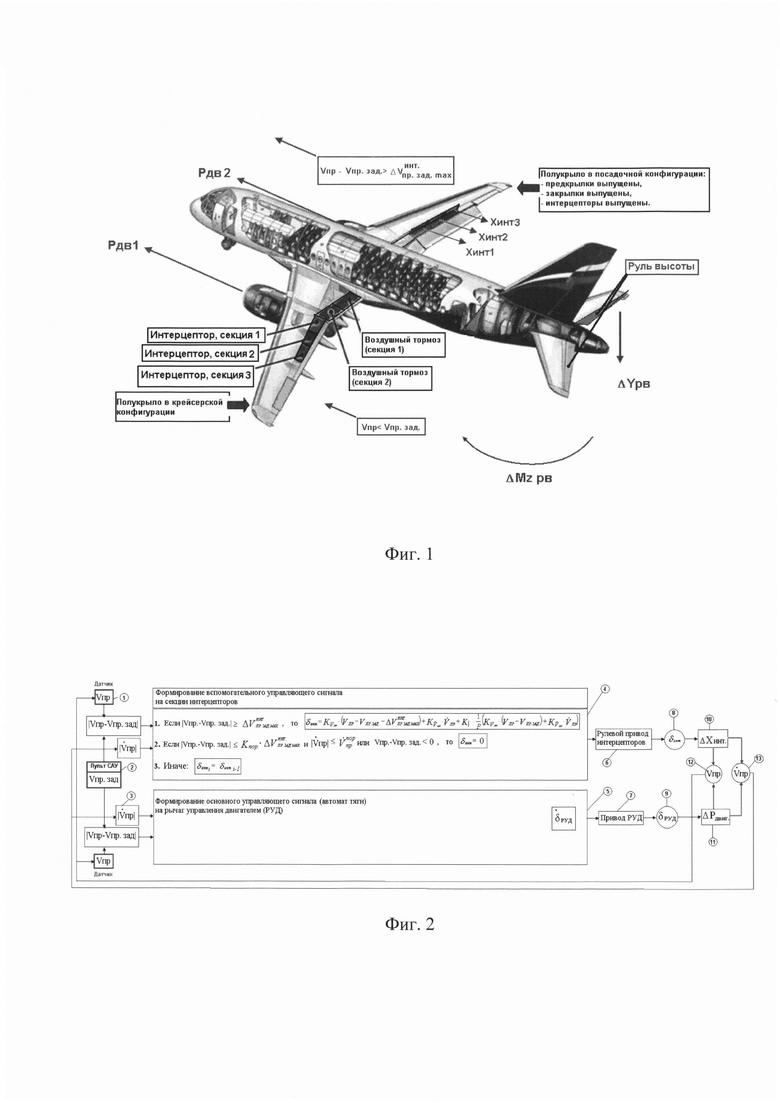
Предлагаемый способ управления скоростью полета самолета с учетом стабилизации скорости основан на реализации возможности автоматического управления силой лобового сопротивления самолета (вспомогательный сигнал) совместно с автоматическим управлением тягой двигателей (основной сигнал) для стабилизации и управления скоростью полета. Управление силой лобового сопротивления в полете реализуется с помощью изменения заданного угла отклонения секций интерцепторов в набегающем потоке воздуха. При выпуске интерцепторов появляется сила аэродинамического сопротивления, замедляющая скорость полета, а при уборке интерцепторов сила лобового сопротивления уменьшается, что способствует увеличению скорости полета. Интерцепторы отклоняются симметрично на левом и правом полукрыле. Кроме изменения силы лобового сопротивления, интерцепторы приводят и к изменению подъемной силы крыла. В режиме автоматического управления скоростью полета с использованием вспомогательного сигнала на секции интерцепторов, изменение подъемной силы крыла, вызванное отклонением интерцепторов, минимизируется изменением угла атаки крыла с помощью момента ΔMzрв от дополнительного компенсационного отклонения руля высоты самолета от электродистанционной системы управления (см. Фиг. 1, где: Рдв1, Рдв2 _ тяга первого и второго двигателей; хкнт1, хинт2, хинт3 - аэродинамическая сила лобового сопротивления от выпуска первой, второй и третьей секций интерцепторов; ΔMzрв - приращение момента тангажа, вызванное отклонением руля высоты; ΔYрв - приращение аэродинамической подъемной силы горизонтального оперения от отклонения руля высоты). В общем случае суммарный управляющий сигнал на руль высоты определяется задачами траекторного управления в вертикальной плоскости с учетом дополнительного компенсационного сигнала. Стабилизатор работает в режиме автобалансировки. На Фиг. 1 для наглядности раздельно на левом и правом полукрыле показано два положения интерцепторов и механизации крыла:
- на левом полукрыле механизация и интерцепторы убраны,
- на правом полукрыле механизация и интерцепторы выпущены.
Управляющий сигнал на секции интерцепторов правого и левого полукрыла в режиме управления скоростью полета совместно с автоматическим управлением тягой двигателей возможен как при убранной, так и выпущенной механизацией крыла (закрылки и предкрылки). Интерцепторы в этом случае работают в следящем режиме управления и отклоняются по величине управляющего сигнала симметрично на левом и правом полурыле.
Управление силой лобового сопротивления самолета (вспомогательный сигнал) выполняется изменением угла отклонения секций интерцепторов симметрично на левом и правом полукрыле. Управление тягой двигателей (основной сигнал) реализуется автоматом тяги по заданной скорости перемещения рычага управления двигателем (РУД). Работа основного и вспомогательного сигнала направлена на реализацию общей цели - минимизации ошибки по скорости (разницы между заданным и текущим значением скорости полета).
На Фиг. 2 показана схема формирования основного и вспомогательного управляющих сигналов, где:
1 - датчик приборной скорости;
2 - пульт управления САУ (задатчик заданной приборной скорости);
3 - контур обработки 
4 - блок формирования вспомогательного управляющего сигнала на привод интерцепторов;
5 - блок формирования основного управляющего сигнала на привод РУД;
6 - рулевой привод интерцепторов;
7 - привод РУД (исполнительный механизм автомата тяги);
8 - контур формирования угла отклонения секций интерцепторов δинт;
9 - контур формирования угла отклонения рычага управления двигателем δруд;
10 - контур обработки Δхинт;
11 - контур обработки ΔРдвиг;
12 - контур обработки Vпр;
13 - контур обработки 
где:
δруд - угол отклонения рычага управления двигателем;
Δхинт - изменение силы лобового сопротивления от отклонения интерцепторов в потоке воздуха;
ΔРдвиг - изменение тяги двигателя.
Входными сигналами для формирования основного и вспомогательного управляющих сигналов являются приборная скорость (сигнал с датчика 1), скорость изменения приборной скорости, получаемой дифференцированием принимаемой с датчика 1 и отфильтрованной приборной скорости (контур 4), заданная на пульте управления САУ 4 приборная скорость. Основная задача автомата тяги и системы управления секциями интерцепторов заключается в формировании основного и вспомогательного управляющих сигналов, направленных на минимизацию разницы между текущим и заданным значением приборной скорости. Автомат тяги формирует заданную скорость перемещения РУД (блок 5), которая является входным сигналом для исполнительного механизма автомата тяги (привода РУД 7). Исполнительный механизм автомата тяги формирует потребное положение РУД (контур 9) для формирования изменения тяги двигателя (контур 11), направленное на минимизацию разницы между текущим и заданным значением приборной скорости (основной сигнал). Вспомогательный управляющий сигнал (блок 4) формирует потребное отклонение секций интерцепторов (контур 8) с помощью рулевого привода 6. Изменение угла отклонения интерцепторов симметрично на левом и правом полукрыле, что приводит к изменению аэродинамической силы лобового сопротивления без изменения угла крена (контур 10), которое изменяет скорость полета (контур 12) и ускорение (контур 13).
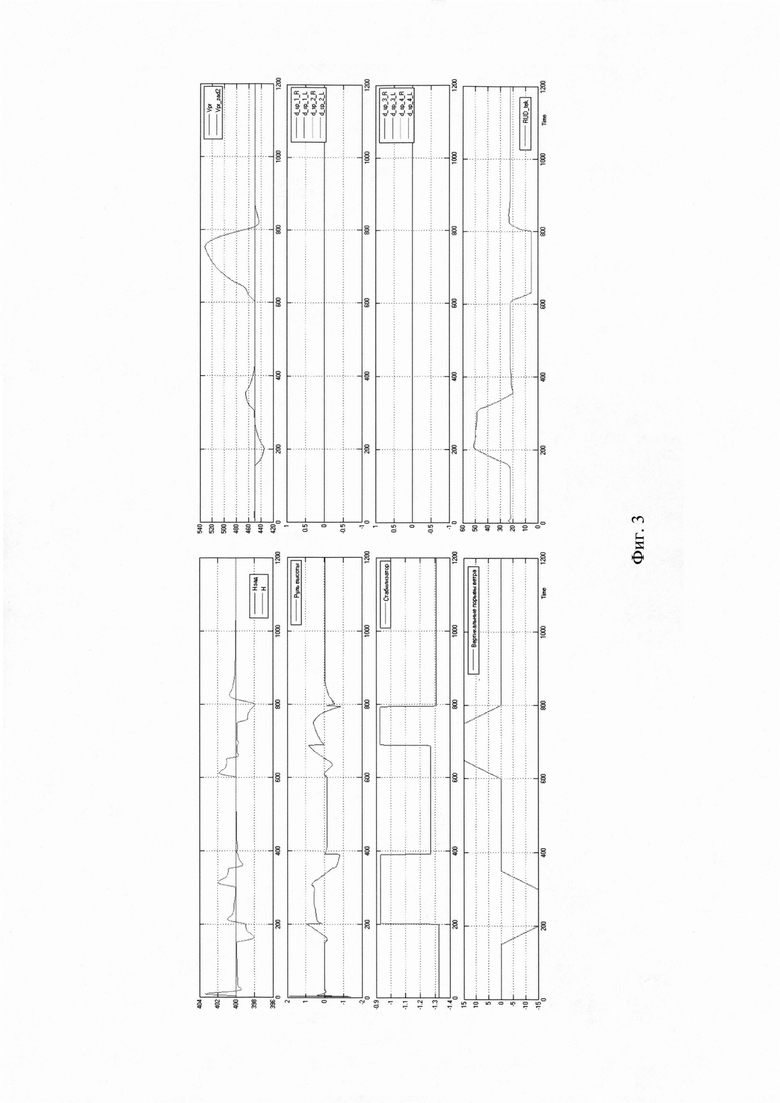
Некоторые результаты математического моделирования реализации предложенного способа посредством формирования вспомогательного управляющего сигнала на секции интерцепторов для стабилизации скорости и управления скоростью полета самолета совместно с автоматическим управлением тягой двигателей, применительно к самолету МС-21-300, приведены на Фиг. 3-13.
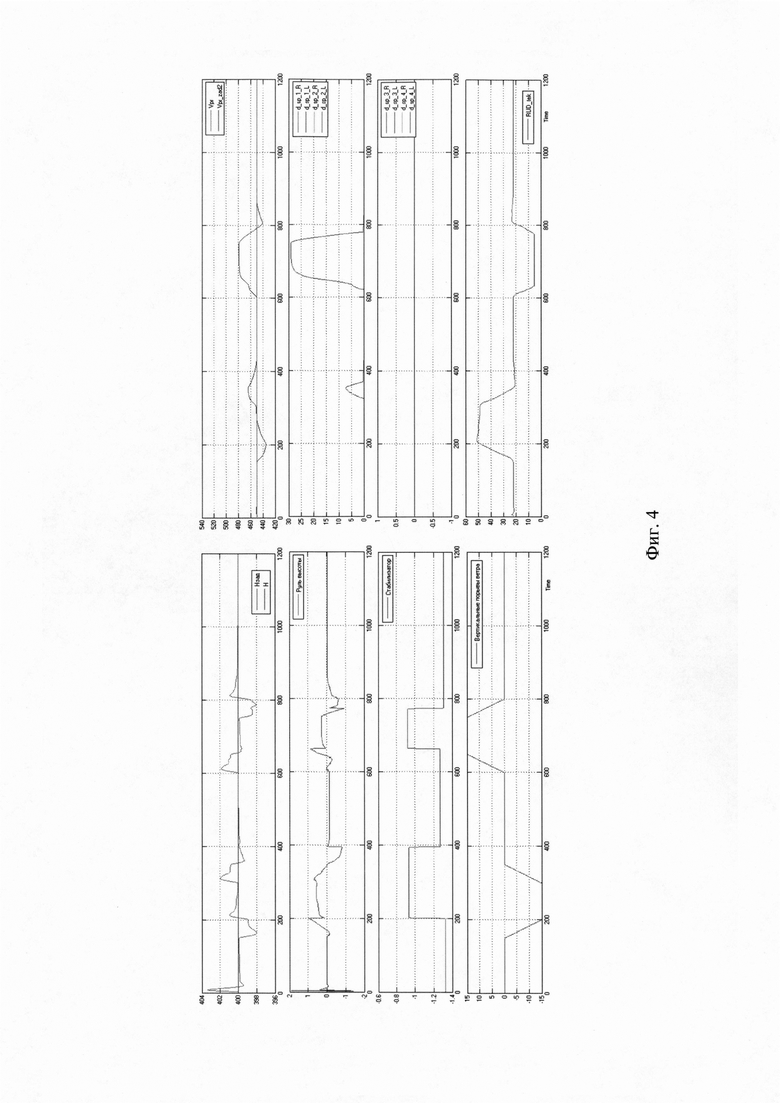
На Фиг. 3 показаны результаты моделирования режима стабилизации заданной высоты (400 м) и скорости полета (450 км/ч) без использования вспомогательного управляющего сигнала на секции интерцепторов в условиях вертикальных порывов ветра. При попадании самолета в восходящий поток воздуха имеет место увеличение ошибки стабилизации заданной скорости полета до  = 80 км/ч. Максимальные отклонения от заданной высоты полета достигали ΔHmax = ±2 м. При условии формирования вспомогательного управляющего сигнала только на внутренние секции интерцепторов при условии их подключения
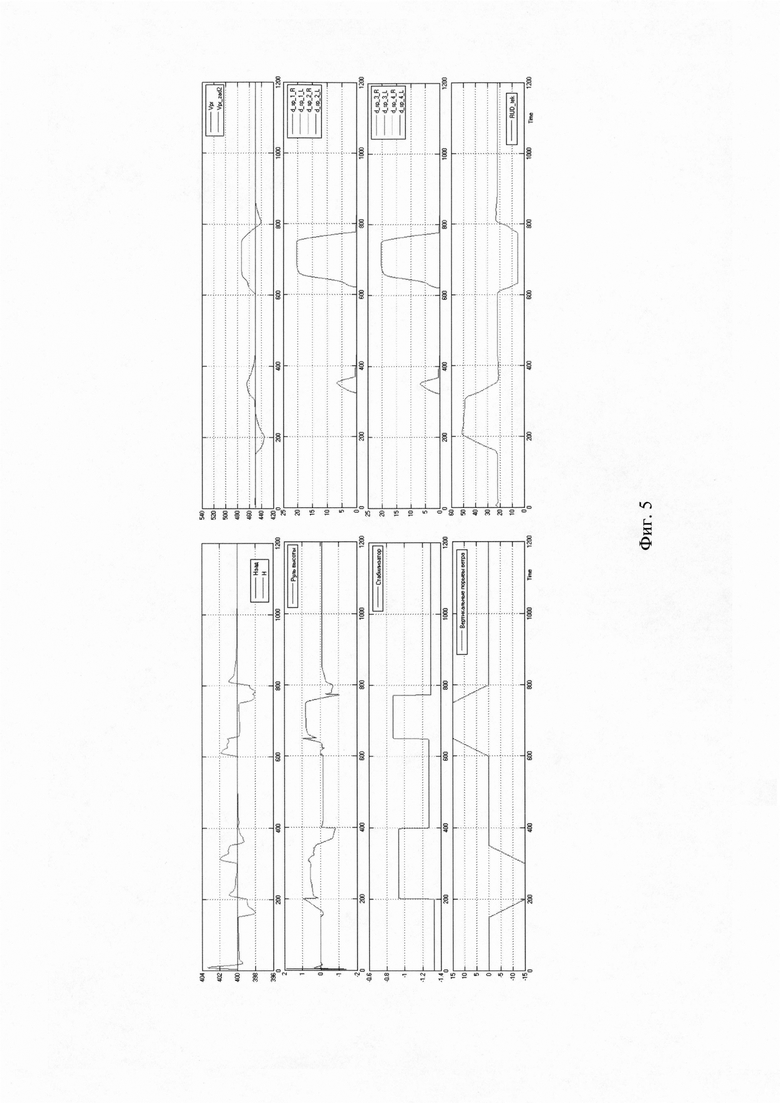
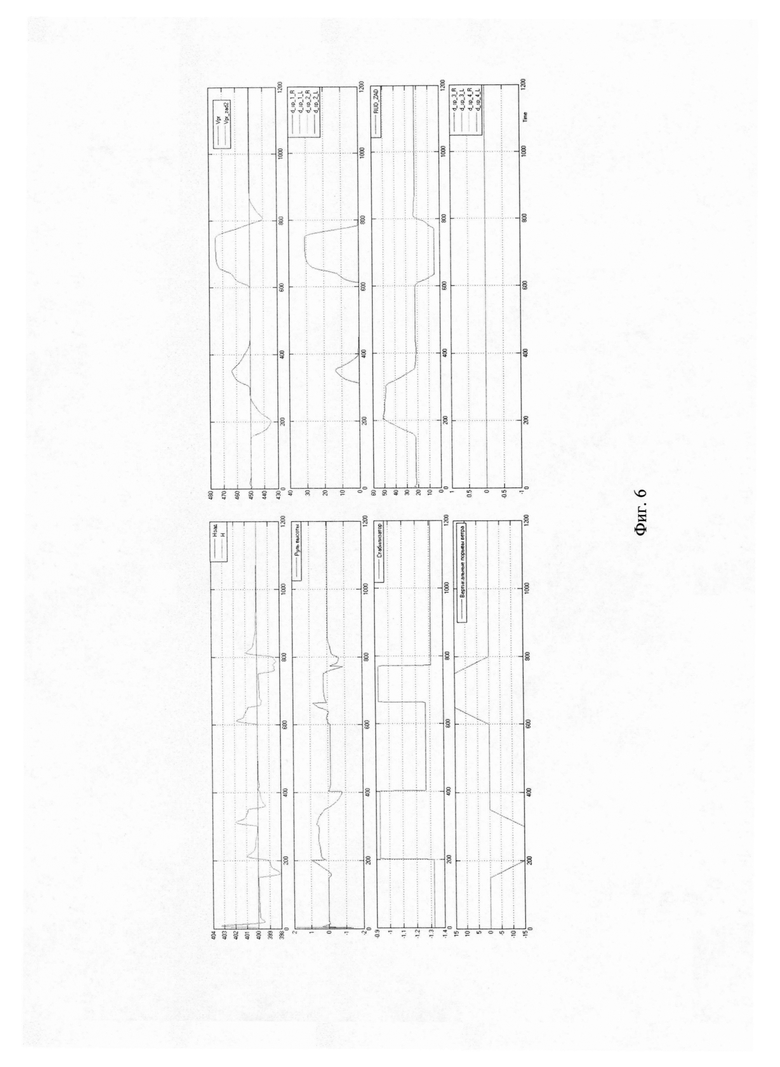
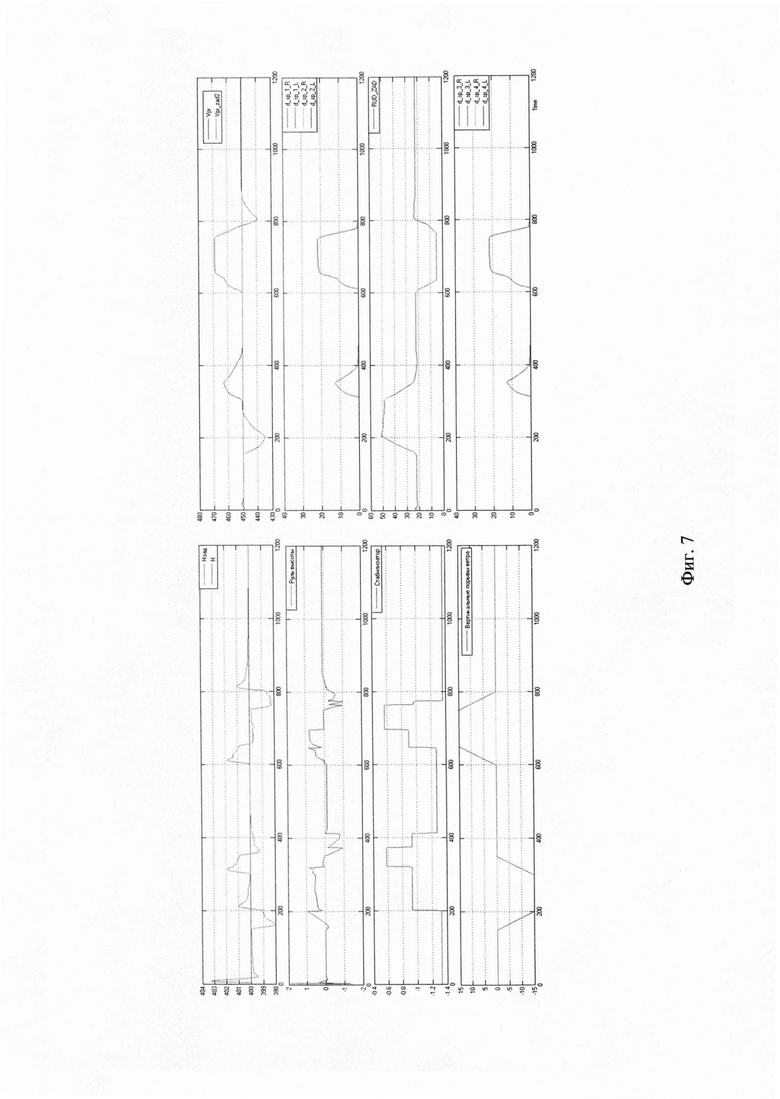
= 80 км/ч. Максимальные отклонения от заданной высоты полета достигали ΔHmax = ±2 м. При условии формирования вспомогательного управляющего сигнала только на внутренние секции интерцепторов при условии их подключения  > 10 км/ч, ошибки стабилизации заданной скорости полета уменьшаются до = 30 км/ч при сохранении точности стабилизации заданной высоты полета в пределах ΔНmax = ±2 м (см. Фиг. 4). Максимальный угол отклонения внутренних секций интерцепторов достигал величины δинт = 29°. При условии формирования вспомогательного управляющего сигнала на внутренние и внешние секции интерцепторов при условии их подключения сигнала > 10 км/ч, ошибки стабилизации заданной скорости полета уменьшаются до = 22 км/ч при сохранении точности стабилизации заданной высоты полета в пределах ΔHmax = ±2 м. (см. Фиг. 5). Максимальный угол отклонения всех секций интерцепторов уменьшился до δинт = 20,5°. Результаты формирования вспомогательного управляющего сигнала при условии > 5 км/ч приведены на Фиг. 6, 7. При формировании вспомогательного управляющего сигнала только на внутренние секции интерцепторов ошибка по скорости достигает величины = 25 км/ч при максимальном угле отклонения секций интерцепторов δинт = 31°. Точность стабилизации заданной высоты полета оставалась в пределах = ±2 м (см. Фиг. 6). Использование внешних и внутренних секций интерцепторов позволило уменьшить ошибку по скорости до величины = 19 км/ч при меньшем (δинт = 22)° максимальном угле отклонения всех секций интерцепторов (см. Фиг. 7).
> 10 км/ч, ошибки стабилизации заданной скорости полета уменьшаются до = 30 км/ч при сохранении точности стабилизации заданной высоты полета в пределах ΔНmax = ±2 м (см. Фиг. 4). Максимальный угол отклонения внутренних секций интерцепторов достигал величины δинт = 29°. При условии формирования вспомогательного управляющего сигнала на внутренние и внешние секции интерцепторов при условии их подключения сигнала > 10 км/ч, ошибки стабилизации заданной скорости полета уменьшаются до = 22 км/ч при сохранении точности стабилизации заданной высоты полета в пределах ΔHmax = ±2 м. (см. Фиг. 5). Максимальный угол отклонения всех секций интерцепторов уменьшился до δинт = 20,5°. Результаты формирования вспомогательного управляющего сигнала при условии > 5 км/ч приведены на Фиг. 6, 7. При формировании вспомогательного управляющего сигнала только на внутренние секции интерцепторов ошибка по скорости достигает величины = 25 км/ч при максимальном угле отклонения секций интерцепторов δинт = 31°. Точность стабилизации заданной высоты полета оставалась в пределах = ±2 м (см. Фиг. 6). Использование внешних и внутренних секций интерцепторов позволило уменьшить ошибку по скорости до величины = 19 км/ч при меньшем (δинт = 22)° максимальном угле отклонения всех секций интерцепторов (см. Фиг. 7).
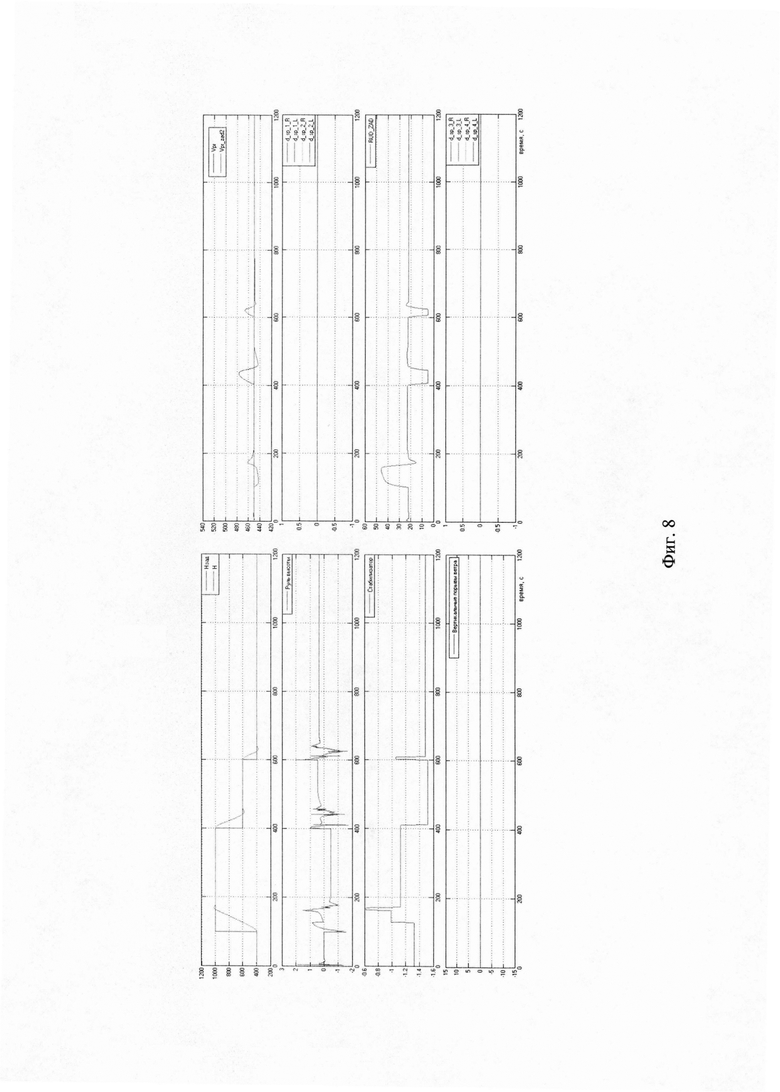
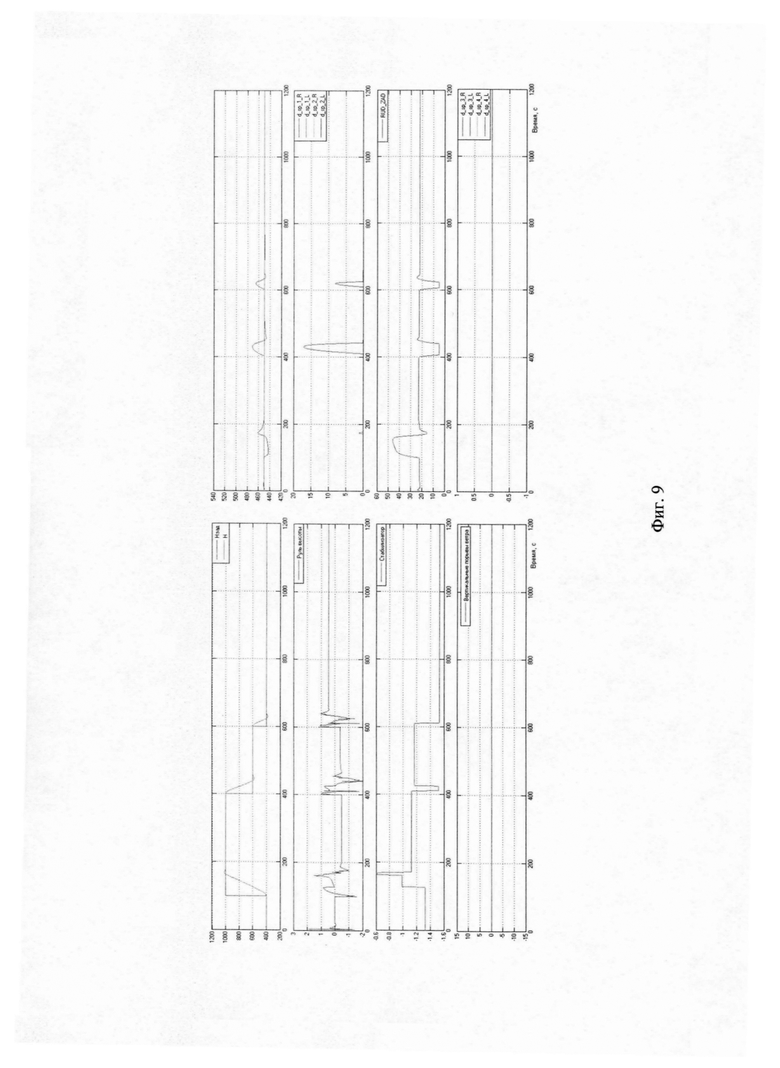
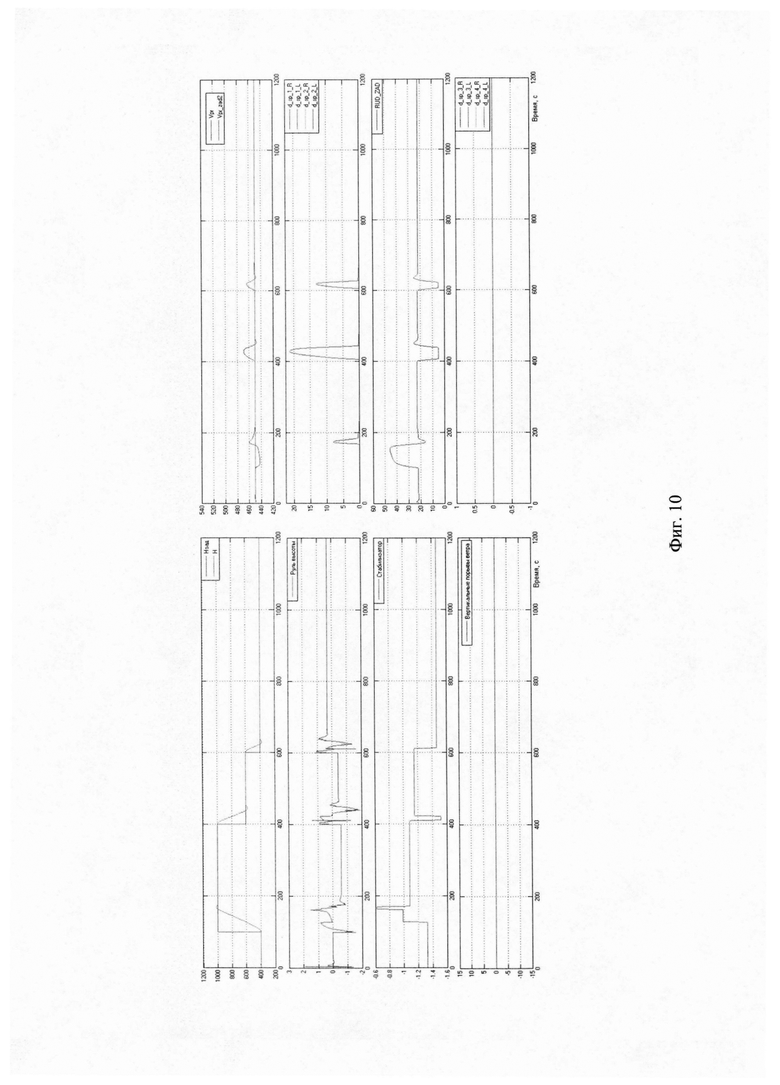
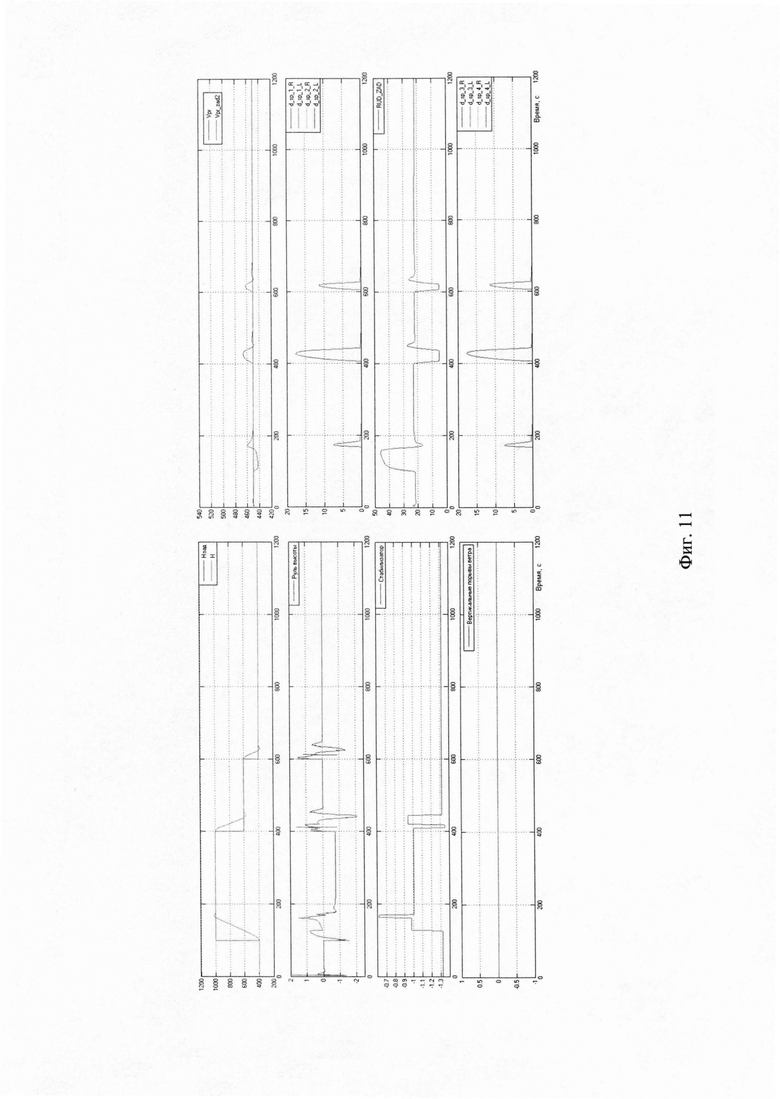
На Фиг. 8-13 приведены результаты моделирования режима вертикальной навигации с реализацией возможности формирования вспомогательного сигнала на секции интерцепторов. При снижении с высоты 1000 м до высоты 600 м и при снижении с высоты 600 м до высоты 400 м, без использования вспомогательного сигнала на секции интерцепторов, при условии стабилизации заданной приборной скорости 450 км/ч, РУДы двигателей достигают упора малого газа δруд мг = 5°. При этом максимальная ошибка по скорости достигает величины = 28 км/ч (см. Фиг. 8). Формирование вспомогательного сигнала только на внутренние секции интерцепторов по условию > 10 км/ч (см. Фиг. 9) позволило уменьшить максимальную ошибку стабилизации заданной величины приборной скорости на этапе снижения до = 21 км/ч без изменения качества траекторного управления в вертикальной плоскости. Максимальный угол отклонения внутренних секций интерцепторов пропорционален величине ошибки по скорости, которая, в свою очередь, зависит от величины участка снижения (при переходе с высоты 1000 м на высоту 600 м δинт max = 17°, при переходе с высоты 600 м на высоту 400 м δинт max = 8°). Уменьшение заданной величиной разницы между текущей и заданной приборной скоростью на условие подключения вспомогательного сигнала на внутренние секции интерцепторов  = 5 км/ч) приводит к увеличению максимальных углов отклонения интерцепторов и повышению точности выдерживания заданной приборной скорости ( =19 км/ч, см. Фиг. 10). Формирование вспомогательного управляющего сигнала на внутренние и внешние секции интерцепторов при =5 км/ч приводит к дальнейшему повышению точности выдерживания заданной приборной скорости ( =17 км/ч) при уменьшении максимальных углов отклонения интерцепторов (см. Фиг. 11).
= 5 км/ч) приводит к увеличению максимальных углов отклонения интерцепторов и повышению точности выдерживания заданной приборной скорости ( =19 км/ч, см. Фиг. 10). Формирование вспомогательного управляющего сигнала на внутренние и внешние секции интерцепторов при =5 км/ч приводит к дальнейшему повышению точности выдерживания заданной приборной скорости ( =17 км/ч) при уменьшении максимальных углов отклонения интерцепторов (см. Фиг. 11).
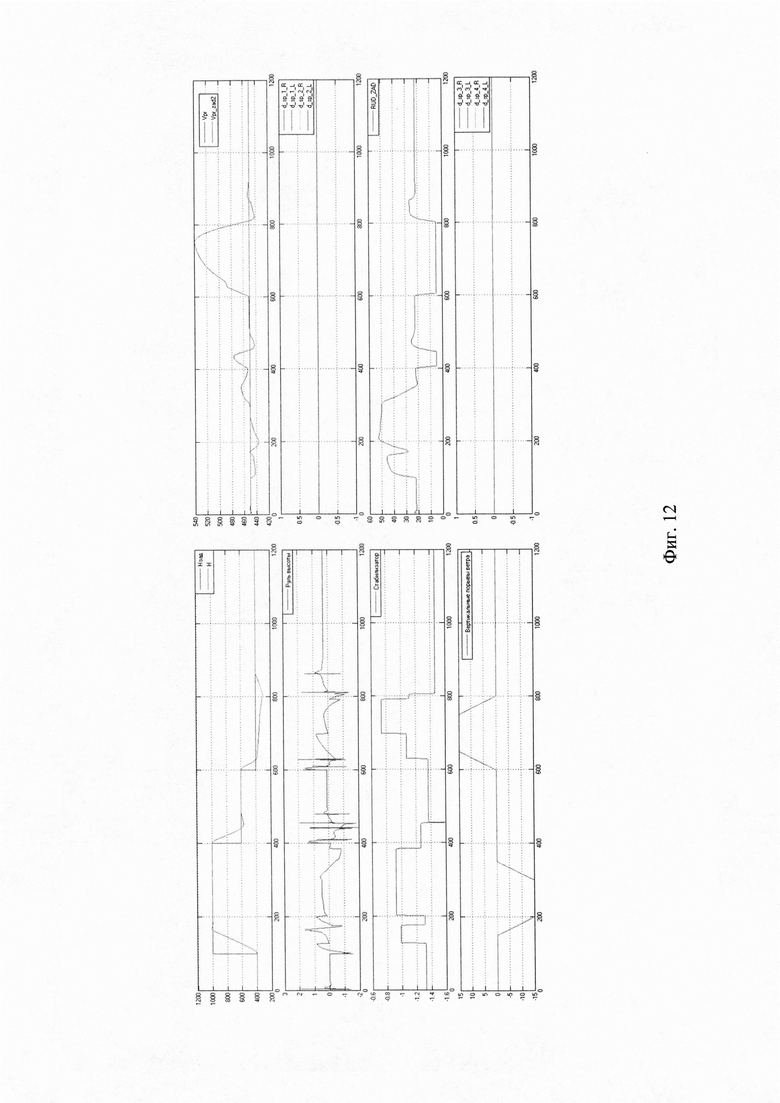
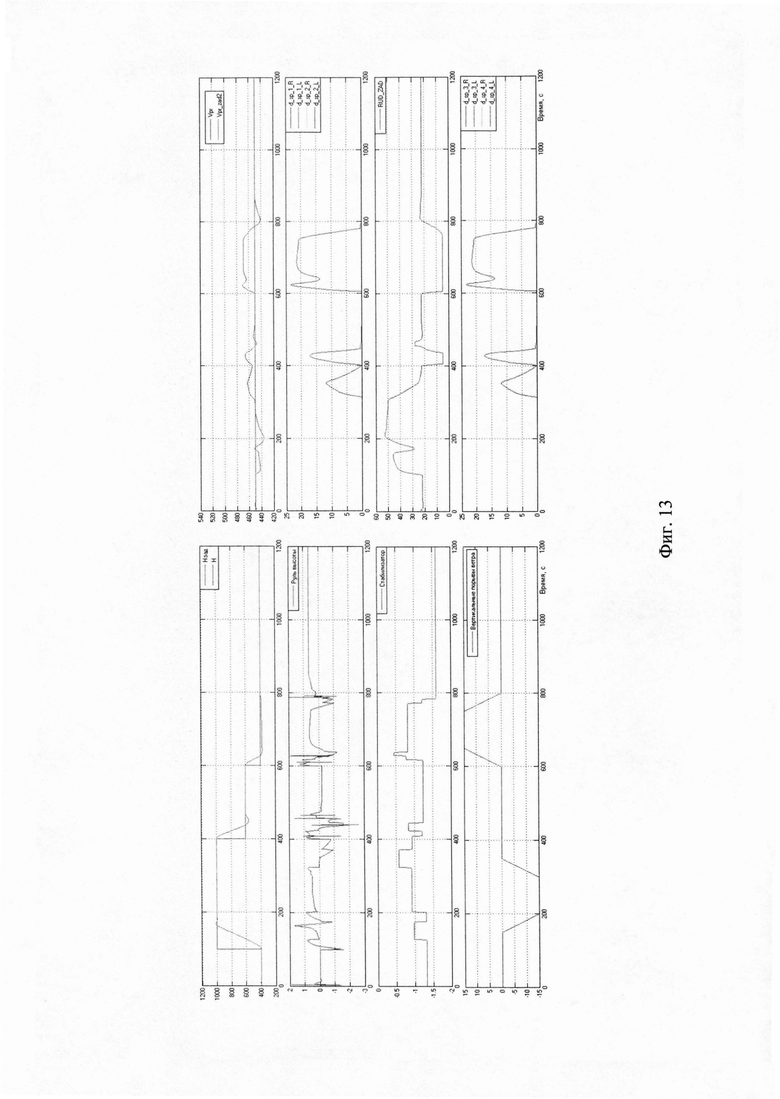
На Фиг. 12, 13 приведены результаты моделирования режима вертикальной навигации самолета МС-21-300 в условиях значительных вертикальных порывов ветра (Wyg = ±15 м/с). На Фиг. 12 вспомогательные управляющие сигналы на секции интерцепторов отключены. В этом случае, при попадании самолета в условия восходящих порывов ветра имеет место увеличении ошибки стабилизации заданной приборной скорости до = 90 км/ч и уход от заданной высоты полета на ΔHmax = 100 м. Подключение вспомогательных управляющих сигналов на внутренние и внешние секции интерцепторов по условию = 5 км/ч позволило уменьшить величину максимальной ошибки стабилизации заданного значения приборной скорости с 90 км/ч до 20 км/ч и повысить качество траекторного управления путем уменьшения максимального отклонения от заданной высоты полета со 100 м до 25 м. Максимальный угол отклонения секций интерцепторов не превышал 25 градусов.
= 5 км/ч позволило уменьшить величину максимальной ошибки стабилизации заданного значения приборной скорости с 90 км/ч до 20 км/ч и повысить качество траекторного управления путем уменьшения максимального отклонения от заданной высоты полета со 100 м до 25 м. Максимальный угол отклонения секций интерцепторов не превышал 25 градусов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО ФОРМИРОВАНИЯ ВСПОМОГАТЕЛЬНЫХ СИГНАЛОВ НА НАЗЕМНОМ УЧАСТКЕ ДВИЖЕНИЯ САМОЛЕТА | 2019 |
|
RU2733666C1 |
| Способ формирования вспомогательных управляющих сигналов на пробеге самолета | 2017 |
|
RU2667411C1 |
| Способ формирования вспомогательных управляющих сигналов на пробеге самолета | 2018 |
|
RU2684961C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА НА ПОСАДКЕ | 2015 |
|
RU2588173C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЁТОМ ДЛЯ РЕАЛИЗАЦИИ АВТОМАТИЧЕСКОГО ПАРАШЮТНОГО ДЕСАНТИРОВАНИЯ ТЯЖЁЛЫХ ГРУЗОВ | 2021 |
|
RU2775957C1 |
| Способ управления самолётом в режиме системы автоматического управления "Посадка" | 2024 |
|
RU2830919C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ НА ПОСАДКЕ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2581215C1 |
| Способ управления самолётом в режиме системы автоматического управления "Уход на второй круг" | 2022 |
|
RU2792904C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ С УЧЕТОМ СТАБИЛИЗАЦИИ ЗАДАННОЙ СКОРОСТИ ПОЛЕТА | 2010 |
|
RU2455201C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
Изобретение относится к способу управления скоростью полета самолета с учетом стабилизации скорости. Для управления скоростью полета самолета используют основной управляющий сигнал, поступающий на привод тяги двигателей, а также дополнительный управляющий сигнал, поступающий на привод секций интерцепторов, условие подключения которого определяется заданной величиной разницы между текущей и заданной приборной скоростью, которая может задаваться пилотом с пульта управления или автоматически при решении оптимизационных задач и выбирается из условия потребной величины долевого участия интерцепторов в решении задачи стабилизации и отслеживания заданной приборной скорости совместно с управлением тягой двигателей определенным образом. Обеспечивается расширение функциональных возможностей и повышение эксплуатационных характеристик самолета. 13 ил.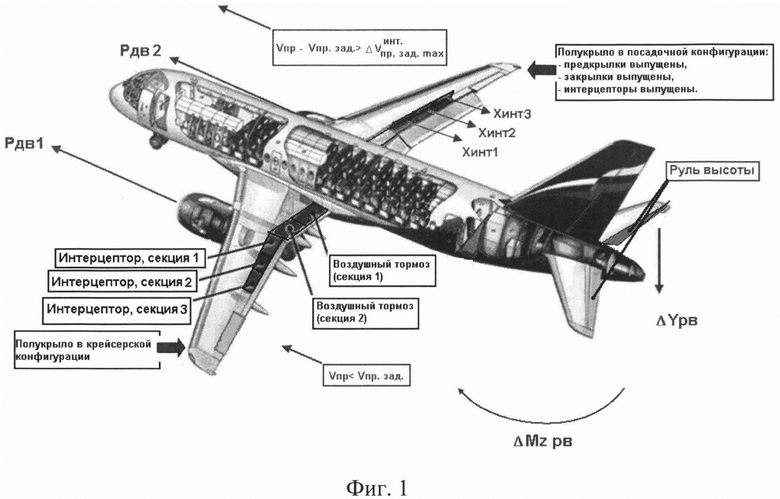
Способ управления скоростью полета самолета с учетом стабилизации скорости, характеризующийся тем, что используются основной управляющий сигнал, поступающий на привод тяги двигателей, а также дополнительный управляющий сигнал, поступающий на привод секций интерцепторов, условие подключения которого определяется заданной величиной разницы между текущей и заданной приборной скоростью, которая может задаваться пилотом с пульта управления или автоматически при решении оптимизационных задач и выбирается из условия потребной величины долевого участия интерцепторов в решении задачи стабилизации и отслеживания заданной приборной скорости совместно с управлением тягой двигателей таким образом, что вспомогательный управляющий сигнал на выпуск секций интерцепторов формируется при условии:

где:
Vпр - текущее значение приборной скорости;
Vпр зад - заданная на пульте управления САУ приборная скорость, причем величина угла отклонения интерцепторов δинт определяется в соответствии с условием:

где:
KVпр - коэффициент усиления реакции на рассогласование между текущей и заданной приборной скоростью;
 - заданная величина разницы между текущей и заданной приборной скоростью, являющаяся порогом подключения вспомогательного сигнала на привод интерцепторов;
- заданная величина разницы между текущей и заданной приборной скоростью, являющаяся порогом подключения вспомогательного сигнала на привод интерцепторов;
 - скорость изменения фильтрованной приборной скорости;
- скорость изменения фильтрованной приборной скорости;
 - коэффициент усиления реакции на скорость изменения фильтрованной приборной скорости;
- коэффициент усиления реакции на скорость изменения фильтрованной приборной скорости;
K∫ - коэффициент усиления интегральной части управляющего сигнала;
р - оператор Лапласа;
T - постоянная времени;
 - фильтрованное значение приборной скорости,
- фильтрованное значение приборной скорости,
при этом управляющий сигнал на полную уборку секций интерцепторов формируется при условии:

либо при условии:
Vпр-Vпр зад<0,
где:
Kпор - заданная величина понижающего коэффициента для определения минимальной допустимой ошибки по скорости полета без использования вспомогательного сигнала на секции интерцепторов;
 - заданная величина изменения приборной скорости для завершения формирования вспомогательного сигнала на привод секций интерцепторов,
- заданная величина изменения приборной скорости для завершения формирования вспомогательного сигнала на привод секций интерцепторов,
причем при несоблюдении любого из упомянутых условий подключения вспомогательного сигнала положение интерцепторов остается неизменным.
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ, СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2011 |
|
RU2537883C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ САМОЛЕТА | 2003 |
|
RU2249540C2 |
| СПОСОБ УПРАВЛЕНИЯ СКОРОСТЬЮ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2305307C2 |
| RU 2017100583 A, 11.07.2018. | |||

