ел
СП
со to
а
частот, устанавливают требуемое значение разности частот питающих напряжений пропорционально требуемой частоте вращения ротора двигателя 1 и коэффициенту электрической редукции. С помощью регуляторов 8,9 частоты определяют текущие значения частот питающих напряжений, в блоке 18 определяют разность этих частот, сравнивают ее с требуемой и изменяют с помощью управляемого генератора 6 частоту первого питающего напряжения до величины, при которой полученная разность частот питающих напряжений не станет равной требуемой. С помощь блока 10 задают требуемый угол нагрузки, измеряют, посредством обмотки 16 и датчика 13 угла нагрузки действительное его значение и сравнивают указанные параметры по величине и
знаку. Если знаки требуемого и действительного углов нагрузки совпадают, то с помощью управляемого генератора 7 увеличивают пропорционально рассогласованию частоту второго подводимого напряжения, а сли указанные знаки противоположны, то частоту второго напряжения уменьшают пропорционально рассогласованию углов нагрузки до тех пор, пока рассогласование по углу нагрузки не станет меньше максимально допустимой величины, В соответствии со способом все приращения электромагнитного момента обеспечиваются изменением частоты питаю- 1ДИХ напряжений, а не амплитуды. В результате появляется возможность исключить из состава устройства узлы и блоки, связанные с регулированием амплитуды питающих напряжений. 3 ил.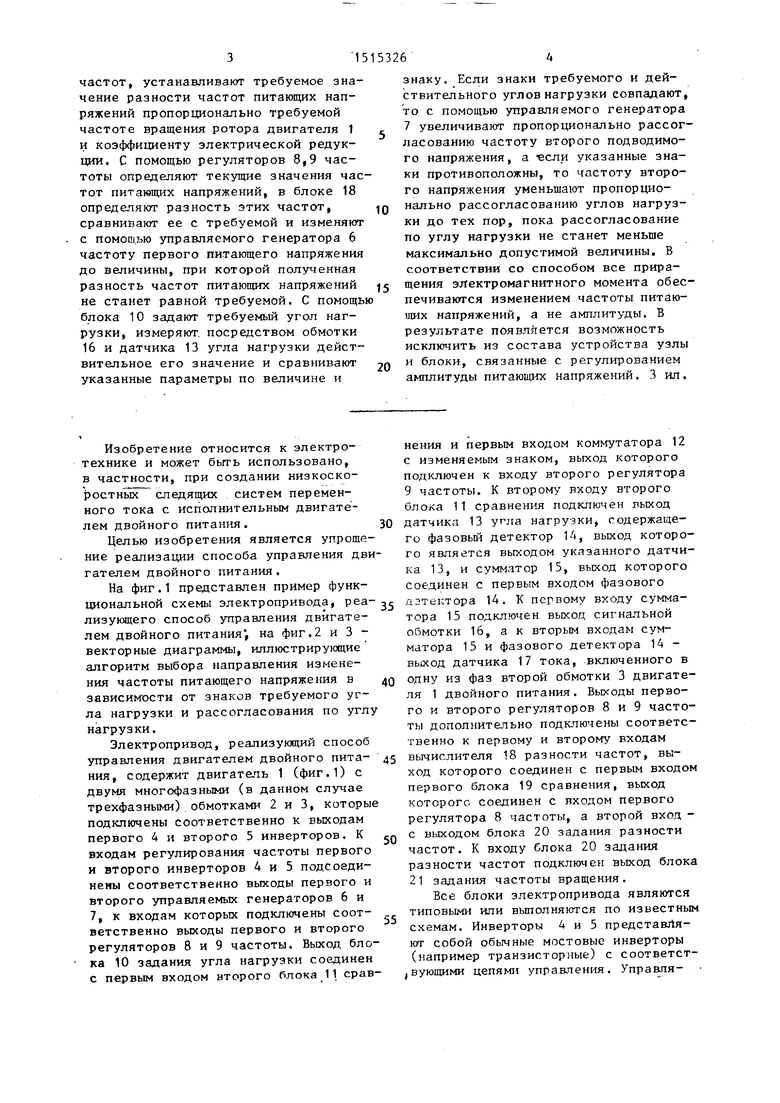
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1524153A1 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1436265A2 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1985 |
|
SU1310991A1 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1541752A1 |
| СПОСОБ ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2016 |
|
RU2626325C1 |
| Способ точной автоматической синхронизации синхронного двигателя, питаемого от преобразователя частоты с инвертором тока, с сетью переменного тока промышленной частоты | 1990 |
|
SU1744755A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2011 |
|
RU2476982C1 |
| СПОСОБ ФАЗОВОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2398349C1 |
| Электропривод | 1986 |
|
SU1385217A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
Изобретение относится к электротехнике. Целью изобретения является упрощение реализации способа управления двигателем двойного питания. Способ заключается в том, что на обмотки 2,3 двигателя 1 подают от инверторов 4,5 раздельно два напряжения с помощью блока 20 задания разности частот, устанавливают требуемое значение разности частот питающих напряжений пропорционально требуемой частоте вращения ротора двигателя 1 и коэффициенту электрической редукции. С помощью регуляторов 8,9 частоты определяют текущие значения частот питающих напряжений, в блоке 18 определяют разность этих частот, сравнивают ее с требуемой и изменяют с помощью управляемого генератора 6 частоту первого питающего напряжения до величины, при которой полученная разность частот питающих напряжений не станет равной требуемой. С помощью блока 10 задают требуемый угол нагрузки, измеряют посредством обмотки 16 и датчика 13 угла нагрузки действительное его значение и сравнивают указанные параметры по величине и знаку. Если знаки требуемого и действительного углов нагрузки совпадают, то с помощью управляемого генератора 7 увеличивают пропорционально рассогласованию частоту второго подводимого напряжения, а если указанные знаки противоположны, то частоту второго напряжения уменьшают пропорционально рассогласованию углов нагрузки до тех пор, пока рассогласование по углу нагрузки не станет меньше максимально допустимой величины. В соответствии со способом все приращения электромагнитного момента обеспечиваются изменением частоты питающих напряжений, а не амплитуды. В результате появляется возможность исключить из состава устройства узлы и блоки, связанные с регулированием амплитуды питающих напряжений. 3 ил.
Изобретение относится к электротехнике и может быть использовано, в частности, при создании низкоскоростных следящих систем переменного тока с исполнительным двигателем двойного питания.
Целью изобретения является упрощение реализации способа управления двигателем двойного питания.
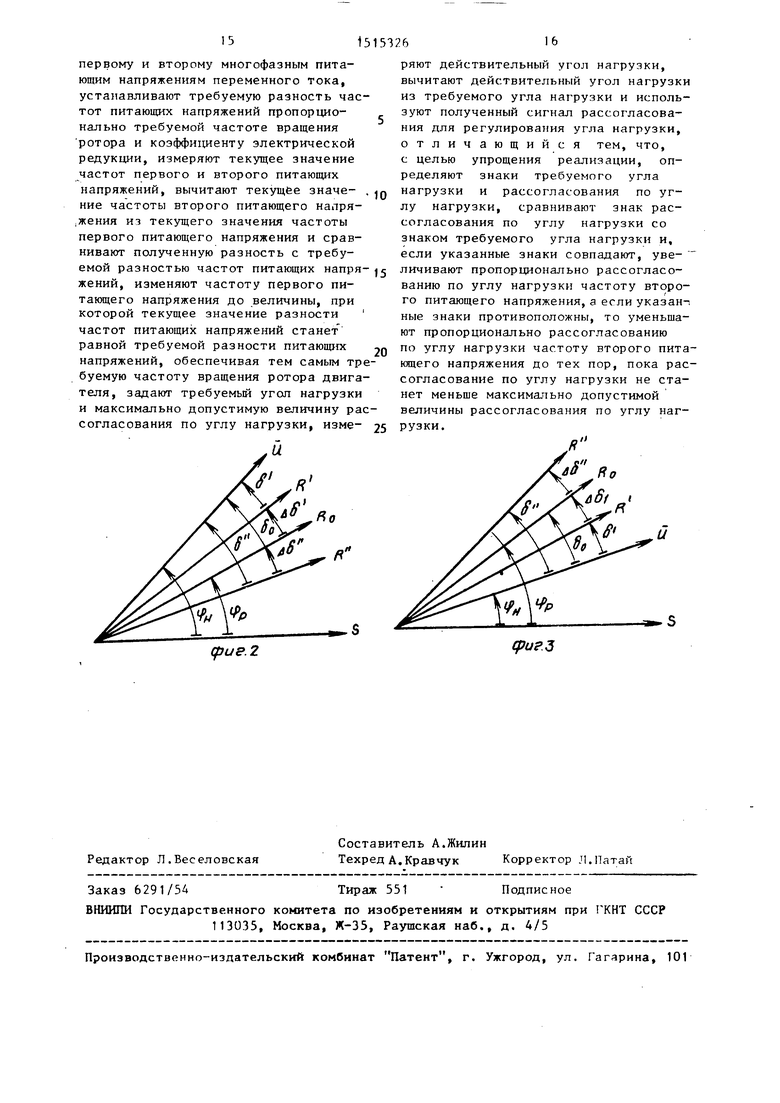
На фиг.1 представлен пример функциональной схемы электропривода, pea- лизующего способ управления двигателем двойного питания , на фиг.2 и 3 - векторные диаграммы, иллюстрирующие алгоритм выбора направления изменения частоты питающего напряжения в зависимости от знаков требуемого угла нагрузки и рассогласования по углу нагрузки.
Электропривод, реализующий способ управления двигателем двойного пита- ния, содержит двигатель 1 (фиг.1) с двумя многофазными (в данном случае трехфазными) обмотками 2 и 3, которы подключены соответственно к выходам первого 4 и второго 5 инверторов. К входам регулирования частоты первого и второго инверторов 4 и 5 подсоединены соответственно выходы первого и второго управляемых генераторов 6 и 7, к входам которых подключены соот- ветственно выходы первого и второго регуляторов 8 и 9 частоты. Выход блока 10 задания угла нагрузки соединен с первым входом второго блока 11 сравнения и первым входом коммутатора 12 с изменяемым знаком, выход которого подключен к входу второго регулятора 9 частоты. К второму входу второго блока 11 сравнения подршючен вькод датчика 13 угла нагрузки, содержащего фазовый детектор 14, выход которого является выходом указанного датчика 13, и сумматор 15, выход которого соединен с первым входом фазового дзтектора 14. К первому входу сумматора 15 подключен выход сигнальной обмотки 16, а к вторым входам сумматора 15 и фазового детектора 14 - выход датчика 17 тока, включенного в одну из фаз второй обмотки 3 двигателя 1 двойного питания. Выходы первого и второго регуляторов 8 и 9 частоты дополнительно подключены соответственно к первому и второму входам вычислителя 18 разности частот, выход которого соединен с первым входом первого блока 19 сравнения, выход которого соединен с входом первого регулятора 8 частоты, а второй вход - с выходом блока 20 задания разности частот. К входу блока 20 задания разности частот подключен выход блока 21 задания частоты вращения.
Все блоки электропривода являются типовыми или вьтолняются по известным схемам. Инверторы 4 и 3 представляют собой обычные мостовые инверторы (например транзисторные) с соответст- ,вующими цепями управления. Упраапя
емые генераторы 6 и 7 являются преобразователями напряжение - частота или код -частота. Блоки 11 и 19 сравнения и вычислитель 18 разности частот в аналоговом варианте могут быть выполнены в виде сумматоров на операционных усилителях (точнее, в виде вычислителей). В качестве блока 21 задания частоты вращения обычно выступает Какое-либо устройство управления более высокого уровня управления (например, регулятор положения, выполненный на базе управляющей ЭВМ). Блок 10 задания угла нагрузки может бьп Ь реализован в виде резисторного делителя напряжения, питаемого напряжением той или иной полярности в зависимости от того, какого знака должен быть требуемый угол нагрузки. Блок 20 задания разности частот в аналоговом варианте представляет собой обычный масштабный усилитель на операционном усилителе с козффициен- . том передачи, равным коэффициенту
электрической редукции. Коммутатор 12 с изменяемым знаком в аналоговом варианте может представлять собой ана логовьш ключ, который коммутирует
Согласно выражению (1) для обеспечения требуемой частоты вращения ротора Ыр необходимо задать требуемую разность частот питающих напряжений U), и cuj, пропорциональную требуемой частоте вращения ротора и коэффициенвходной сигнал на выход непосредствен-зо ту электрической редукции Кр, причем
но или через инвертор (например, на операционном усилителе) в зависимости от сочетания знаков сигнала рассогласования по углу нагрузки и требуемого угла нагрузки, для чего по управляющему входу аналогового ключа должна стоять логическая схема, выполняющая логическую функцию Эквивалентность. Регуляторы 8 и 9 частоты представляют собой последовательные корректирующие устройства и выполняются, например, на операционных усилителях с корректирующими цепочками, параметры которых выбираются по известным методикам теории автоматического управления. Датчик 17 тока в простейшем случае - резистор с малым сопротивленим, I
Сущность способа управления двигателем двойного питания заключается в следующем.
Запитывают первую и вторую обмотки двигателя двойного питания от отдельных источников (инверторов) многофазными напряжениями переменного тока. У двигателя двойного питания на основе асинхронного двигателя с фазным ротором перв.ой обмоткой можно считать обмотку статора, а второй 35
40
45
50
55
значения частот и), и uJ,не играют роли, так как важна только их разность. В системе управления предусмотрен кон тур поддержания (стабилизации) разности частот питающих напряжений
Wo(c) W,(t) - u),(t), (2)
где ЛШо- разность частот питающих
напряжений.
В системе управления двигателем двойного питания частоты ы второго питающего напряжения задается (может меняться), а частота со, первого питающего напряжения автоматически выбирается в соответствии с выражением, получаемым из (1):
UJ,(t) KpU)p(t) +oJ.j(t), (3)
где Кр Wp- фактически требуемая разность частот питающих напряжений.
Выполнение условия (3) обеспечивается во всех режимах работы двигателя двойного питания с помощью специального контура регулирования разнос ти частот. Для этого измеряют текущие частоты ы, первого и и) второго питающих напряжений, вычисляют их текущуюраз- ность du) по формуле
обмотку ротора. У.индукторного двигат теля двойного питания обе обмотки расположены на статоре.
Вынужденная составляющая частоты вращения ротора двигателя двойного питания определяется следующим выражением:
UJp(t)
ы,с) (t) К„
(1)
где
u)p
частота вращения poTopaj СА), и угловые частоты соответственно первого и рторого пита1о- щих напряжений; Кр- коэффициент электрической
редукции (для двигателя двойного питания на основе асинхронного двигателя с фазным ротором равен числу пар полюсов, а для индукторного двигателя двойного питания - числу зубцов ротора).
Согласно выражению (1) для обеспе чения требуемой частоты вращения ротора Ыр необходимо задать требуемую разность частот питающих напряжений U), и cuj, пропорциональную требуемой частоте вращения ротора и коэффициенту электрической редукции Кр, причем
5
0
5
0
5
значения частот и), и uJ,не играют роли, так как важна только их разность. В системе управления предусмотрен контур поддержания (стабилизации) разности частот питающих напряжений
Wo(c) W,(t) - u),(t), (2)
где ЛШо- разность частот питающих
напряжений.
В системе управления двигателем двойного питания частоты ы второго питающего напряжения задается (может меняться), а частота со, первого питающего напряжения автоматически выбирается в соответствии с выражением, получаемым из (1):
UJ,(t) KpU)p(t) +oJ.j(t), (3)
где Кр Wp- фактически требуемая разность частот питающих напряжений.
Выполнение условия (3) обеспечивается во всех режимах работы двигателя двойного питания с помощью специального контура регулирования разности частот. Для этого измеряют текущие частоты ы, первого и и) второго питающих напряжений, вычисляют их текущуюраз- ность du) по формуле
/3w(t) uJ,(t) - cJjCt),
.-
сравнивают текущую разность частот с требуемой, равной Кр Ыр , и подают сигнал рассогласования по разности частот на регулятор частоты первого питающего напряжения. В результате требуемая разность частот обеспечивается за счет изменения частоты первого питающего напряжения. Величина и направление изменения частоты iW первого питающего напряжения определяются автоматически самой системой, как это имеет место во всех замкнутых системах автоматического регулирова ния, использующих принцип работы по отклонению, т.е. с отрицательной обратной связью ПО регулируемому параметру. Следовательно, при любой частоте оо-г второго питающего напряжения разность частот будет равна требуемой, а следовательно, и частота вращения ротора будет равна требуемой.
Б установившемся режиме при посто явной частоте вращения ротора и пос- тоянном моменте нагрузки на валу двигателя угол нагрузки также постоянен так как электромагнитный момент двигателя равен моменту нагрузки. При изменении задания по частоте вращения (при переходе на новую частоту вращения ротора) или при изменении момента нагрузки на валу возникает дисбаланс между электромагнитным моментом и моментом нагрузки.
Двигатель двойного питания, как и любая синхронная мащина,имеет внутренний контур регулирования электромагнитного момента, под действием которого начинает изменяться угол на грузки так, чтобы в конечном итоге Электромагнитньй момент стал равным моменту нагрузки. Наличие этого контура обусловлено самой конструкцией двигателя двойного питания. Если бы в системе отсутствовало принудительное внешнее регулирование угла нагрузки , то угол нагрузки мог бы за пределы значений +90° в некоторых режимах, двигатель выпал бы из синхронизма и стал неуправляемым. Поэтому в системе управления двигателем предусмотрен замкнутый контур регулирования угла нагрузки (внешний контур).
Для принудительного регулирования угла нагрузки задают требуемое значение угла нагрузки и сравнивают его с измеренным действительным. Сигнал рассогласования по углу нагрузки по
10
15
5 20
l25 30 35
4045 JQ
дают на регулятор частоты второго инвертора, и частота Wj второго питающего напряжения измеряется таким образом, чтобы в конечном итоге рассогласование по углу нагрузки стало минимальным (в идеале - равным нулю).
Необходимая величина изменения частоты второго питающего напряжения определяется системой автоматически, как это имеет место во всех системах автоматического регулирования, построенных с использованием принципа регулирования по отклонению регулируемого параметра (в данном случае - угла нагрузки). Необходимо только, чтобы обратная связь.по регулируемому параметру всегда была отрицательной.
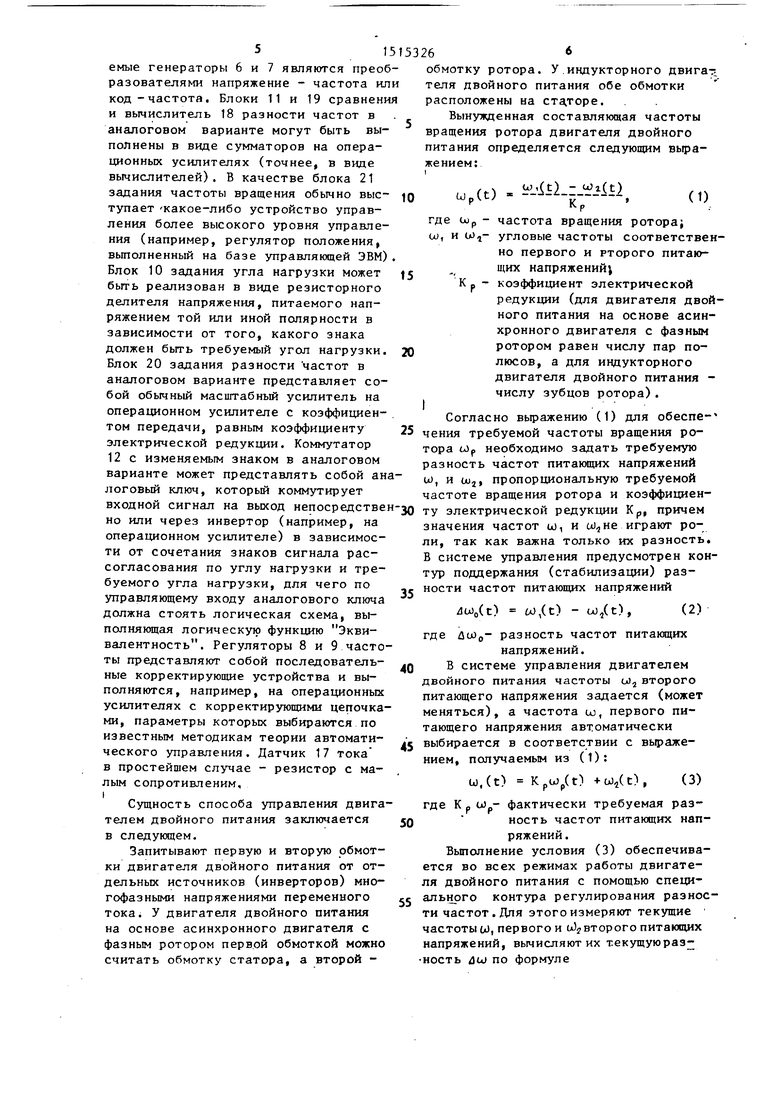
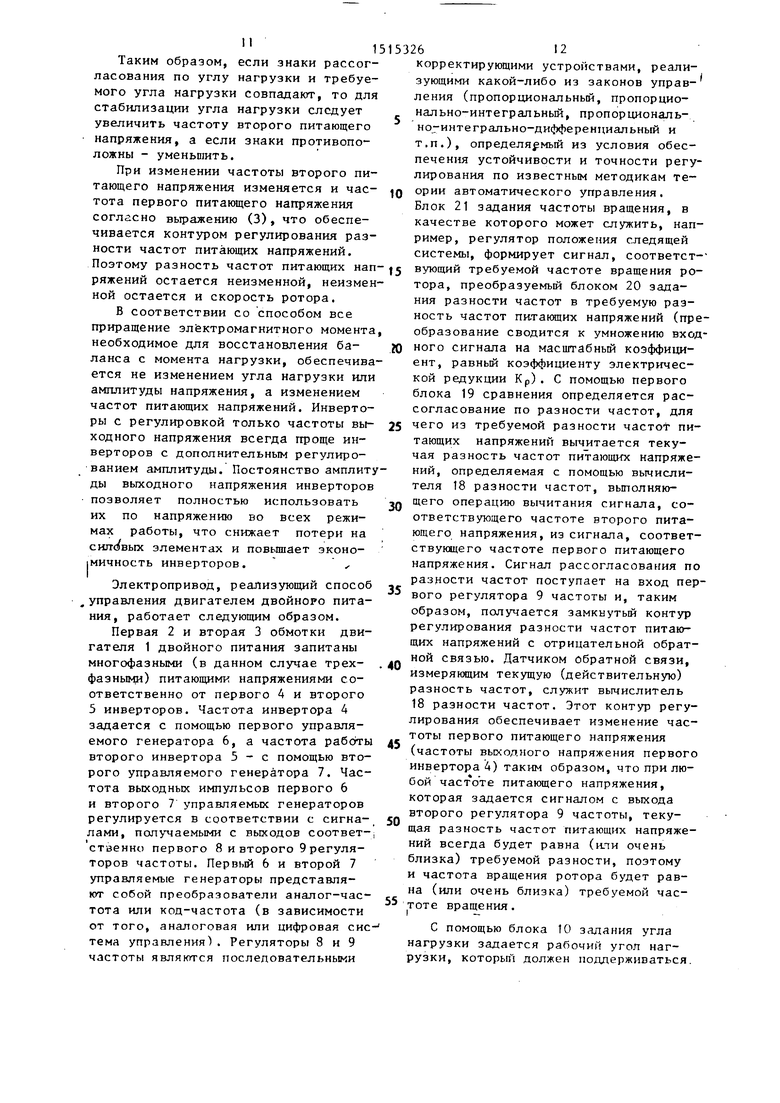
Для двигателя двойного питания возможны два режима работы: когда момент нагрузки на валу является тормозным, а электромагнитный момент двигателя - вращающим и когда момент нагрузки на валу является вращающим, а электромагнитный момент двигателя - тормозным. В первом случае угол нагрузки в установившемся режиме отрица- тельньш, поэтому требуемый угол нагрузки задается отрицательным, а во втором случае - угол нагрузки положительный и требуемый угол нагрузки должен задаваться положительным. Оба случая иллюстрируются векторными диаграммами на фиг.2 (тормозной момент нагрузки) и на фиг.З (вращающий момент нагрузки). На диаграммах показаны:
и - обобщенный вектор питающих напряжений; S - ось, связанная со статором, относительно которой измеряются все углы) RP - заданное положение оси ротора, соответствующее требуемому углу нагрузки; R и. R - возможные положения оси ротора при отклонении ее от заданного положения /действительного угла нагрузки от требуемого/.
Угол нагрузки определяется как угол между осью ротора и обобщенным вектором питающих напряжений. Если ПРИНЯТЬ для простоты величину коэффициента .электрической редукции
Кр 1,
то угол нагрузки выражается следующим образом:
P- ,,
где f - угол нагрузки
/р- угол поворота ротора; угол поворота обобщенного
вектора питающих напряжений все углы измеряются относительно одной оси S, связанной со статором.
Рассогласование по углу нагрузки вычисляется по следующей формуле:
uJ сР, - с,(6)
где u(f рассогласование по углу нагpy3KHj
- заданный (требуемьй) угол
нагрузки
cf - действительный угол нагрузки.
Понятие обобщенного вектора питающих напряжений для двигателя двойного питания имеет следующий смысл. Так как имеются две обмотки, питаемые от отдельных источников, то фак- ,тически существуют и два вектора питающих напряжений. Однако их можно условно заменить одним обобщенным вектором, вращающимся в пространстве с разностной скоростью согласно выражению (2). Угол поворота обобщенного вектора питающих напряжений тог да выразится следующим образом:
1/н(О L0,(t) - U)4(t) t, (7)
где t - текущее время.
Физическое обоснование регулирования угла нагрузки путем изменения частот питающих напряжений заключается в следующем.
Пусть, например, на ротор двигателя двойного питания действует тормоз- ный момент нагрузки (фиг.2). Тогда ротор двигателя (его ось) будет отставать от обобщенного вектора питающих напряжений. Это означает, что угол нагрузки в установившемся режиме отрицательный . согласно выражению (5). Положение оси ротора, соответствующее этому режиму, обозначено R.
Допустим, что момент нагрузки несколько увеличился и ось ротора заняла положение R. Тогда вычисленное согласно выражению (6) рассогласование по углу нагрузки лс 0.
Для уменьшения рассогласования по углу нагрузки необходимо увеличить электромагнитный момент двигателя, чтобы он стал равен изменившемуся / увеличившемуся) моменту нагрузки, за
10
15
дО45
:счет внешнего регулирования. Если уменьшить частоты питающих напряжений, то пропорционально уменьшатся индуктивные сопротивления обмоток и при постоянных амплитудах питающих напряжений произойдет обратно пропорциональное изменение токов (т.е. увеличение их), которое приведет к увеличению электромагнитного момента. Угол нагрузки начнет уменьшаться до тех пор, пока рассогласование по углу нагрузки не станет минимальным (в идеале - равным нулю).
Нри уменьшении момента нагрузки ось.ротора займет положение R . Рассогласование по углу нагрузки в этом случае будет /зс/ 0.
Для уменьшения рассогласования необходимо также уменьшить электромагнитный момент двигателя. Для этого следует увеличить частоты питающих напряжений, соответственно, уменьшаются токи в обмотках и электромагнитный момент. Действительный угол нагрузки остается равным (или близким) требу емому.
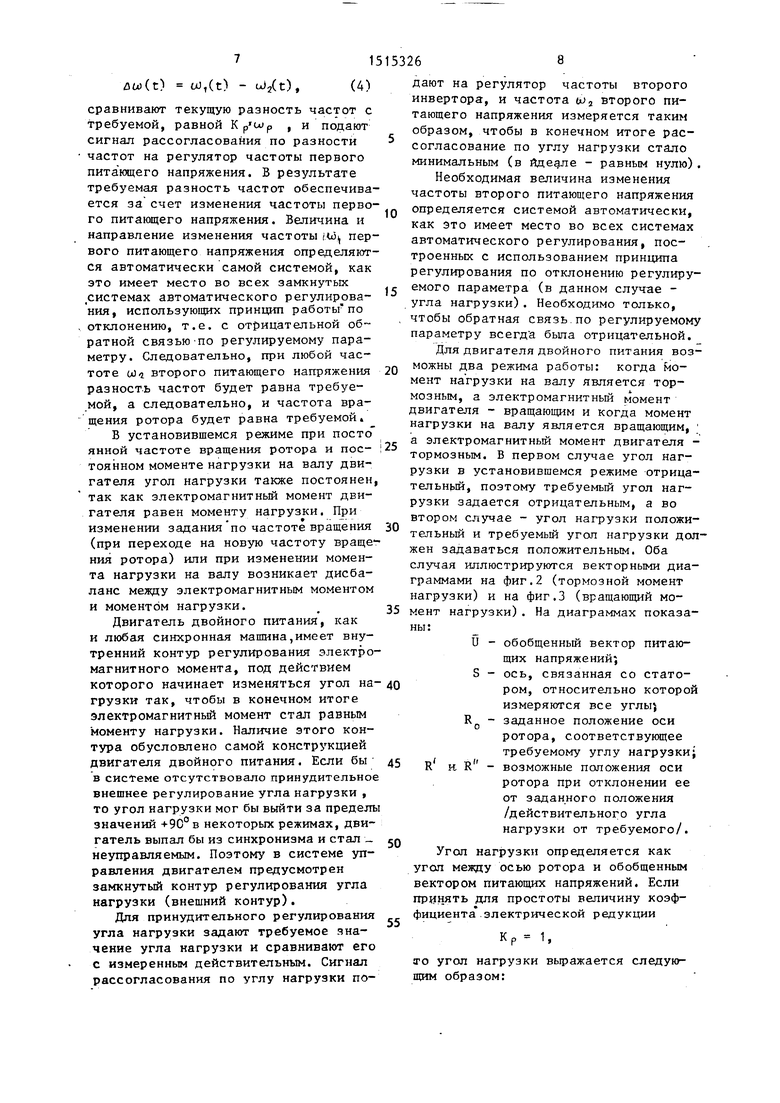
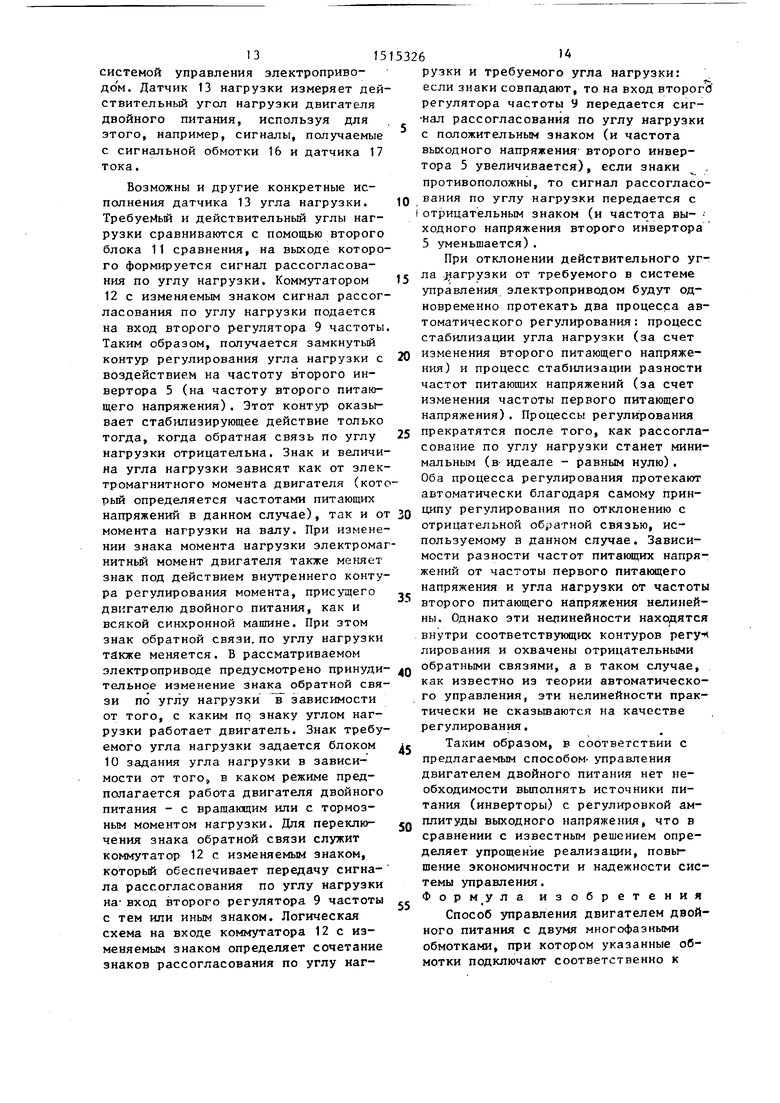
На фиг.З приведена векторная диаграмма для случая вращающего момента нагрузки, направленного по ходу вращения ротора. В данном случае угловое положение ротора опережает угловое положение обобщенного вектора питающих напряжений, поэтому согласно (5) угол нагрузки в установившем- 35 мя режиме (и требуемый угол нагрузки) будет положителен. При увеличении момента нагрузки ось ротора займет положение R и-расс.огласование пЬ углу нагрузки согласно (6) .
20
25
Для уменьшения рассогласования по углу нагрузки необходимо увеличить электромагнитный момент двигателя. Поэтому следует уменьшить частоты питающих напряжений, что приведет к увеличению токов в обмотках и возрастанию электромагнитного момента.
Если момент нагрузки уменьшится, то ос ь ротора займет положение R , а рассогласование по углу нагрузки согласно (6) .
Для уменьшения рассогласования по углу нагрузки необходимо уменьшить электромагнитный момент двигателя. Поэтому следует увеличить частоты питающих напряжений, что приведет к уменьшению токов в обмотках и умень- щению электромагнитного момента.
Таким образом, если знаки рассогласования по углу нагрузки и требуемого угла нагрузки совпадают, то для стабилизации угла нагрузки следует увеличить частоту второго питающего напряжения, а если знаки противоположны - уменьшить.
При изменении частоты второго питающего напряжения изменяется и частота первого питающего напряжения согласно выражению (3), что обеспечивается контуром регулирования разности частот питающих напряжений.
Поэтому разность частот питающих нап-| вующий требуемой частоте вращения ро- ряжений остается неизменной, неизмен- тора, преобразуемый блоком 20 заданой остается и скорость ротора.
В соответствии со способом все приращение электромагнитного момента, необходимое для восстановления баланса с момента нагрузки, обеспечивается не изменением угла нагрузки или амплитуды напряжения, а изменением частот питающих напряжений. Инверторы с регулировкой только частоты выходного напряжения всегда проще инверторов с дополнительным регулированием амплитуды. Постоянство амплитуды выходного напряжения инверторов позволяет полностью использовать их по напряжению во всех режимах работы, что снижает потери на сштс5вьгх элементах и повьшает эконо- |мичность инверторов.,
Электропривод, реализующий способ управления двигателем двойного питания, работает следующим образом.
Первая 2 и вторая 3 обмотки двигателя 1 двойного питания запитаны многофазными (в данном случае трехфазными) питающими напряжениями соответственно от первого 4 и второго 5 инверторов. Частота инвертора 4 задается с помощью первого управляемого генератора 6, а частота рабо1ты второго инвертора 5 - с помощью вто рого управляемого генератора 7. Частота выходных импульсов первого 6 и второго 7 управляемых генераторов регулируется в соответствии с сигна-, лами, получаемыми с выходов соответ-| ственно первого 8 и второго 9 регуляторов частоты. Первый 6 и второй 7 управляемые генераторы представляют собой преобразователи аналог-частота или код-частота (в зависимости от того, аналоговая или цифровая система управления). Регуляторы 8 и 9 частоты являются последовательными
корректирующими устройствами, реализующими какой-либо из законов управления (пропорциональный, пропорционально-интегральный, пропорциональ- но-интегрально-дифференциальный и т.п.), определя мьй из условия обеспечения устойчивости и точности регулирования по известным методикам теории автоматического управления. Блок 21 задания частоты вращения, в качестве которого может служить, например, регулятор положения следящей системы, формирует сигнал, соответст
ния разности частот в требуемую разность частот питающих напряжений (преобразование сводится к умножению входного сигнала на масщтабный коэффициент, равный коэффициенту электрической редукции Кр). С помощью первого блока 19 сравнения определяется рассогласование по разности частот, для чего из требуемой разности частот питающих напряжений вычитается текучая разность частот питающих напряжений, определяемая с помощью вычислителя 18 разности частот, выполняющего операцию вычитания сигнала, соответствующего частоте второго питающего напряжения, из сигнала, соответствующего частоте первого питающего напряжения. Сигнал рассогласования по разности частот поступает на вход первого регулятора 9 частоты и, таким образом, получается замкнутый контур регулирования разности частот питакг- щих напряжений с отрицательной обратной связью. Датчиком обратной связи, измеряющим текущую (действительную) разность частот, служит вычислитель 18 разности частот. Этот контур регулирования обеспечивает изменение частоты первого питающего напряжения (частоты вьсходного напряжения первого инвертора А) таким образом, что при любой частоте питающего напряжения, которая задается сигналом с выхода второго регулятора 9 частоты, текущая разность частот питающих напряжений всегда будет равна (или очень близка) требуемой разности, поэтому и частота вращения ротора будет равна (или очень близка) требуемой частоте вращения.
С помощью блока 10 задания угла нагрузки задается рабочий угол нагрузки, который должен поддерживаться.
1315
системой управления электроприводом. Датчик 13 нагрузки измеряет действительный угол нагрузки двигателя двойного питания, используя для этого, например, сигналы, получаемые с сигнальной обмотки 16 и датчика 17 тока.
Возможны и другие конкретные исполнения датчика 13 угла нагрузки. Требуемый и действительный углы нагрузки сравниваются с помощью второго блока 11 сравнения, на выходе которого формируется сигнал рассогласования по углу нагрузки. Коммутатором 12 с изменяемым знаком сигнал рассогласования по углу нагрузки подается на вход второго р егулятора 9 частоты Таким образом, получается замкнутый контур регулирования угла нагрузки с воздействием на частоту второго инвертора 5 (на частоту второго питающего напряжения). Этот контур оказывает стабилизирующее действие только тогда, когда обратная связь по углу нагрузки отрицательна. Знак и величина угла нагрузки зависят как от электромагнитного момента двигателя (который определяется частотами питающих напряжений в данном случае), так и от момента нагрузки на валу. При изменении знака момента нагрузки электромагнитный момент двигателя также меняет знак под действием внутреннего контура регулирования момента, присущего двигателю двойного питания, как и всякой синхронной машине. При этом знак обратной связи, по углу нагрузки также меняется. В рассматриваемом электроприводе предусмотрено принудительное изменение знака обратной связи по углу нагрузки 1в зависимости от того, с каким по знаку углом нагрузки работает двигатель. Знак требуемого угла нагрузки задается блоком 10 задания угла нагрузки в зависимости от того, в каком режиме предполагается работа двигателя двойного питания - с вращающим или с тормозным моментом нагрузки. Для переключения знака обратной связи служит коммутатор 12 с изменяемым знаком, который обеспечивает передачу сигнала рассогласования по углу нагрузки на вход второго регулятора 9 частоты с тем или иным знаком. Логическая схема на входе коммутатора 12 с изменяемым знаком определяет сочетание знаков рассогласования по углу наг326
рузки и требуемого угла нагрузки: если знаки совпадают, то на вход второго регулятора частоты У передается сиг- нал рассогласования по углу нагрузки с положительным знаком (и частота выходного напряжения второго инвертора 5 увеличивается), если знаки . противоположны, то сигнал рассогласования по углу нагрузки передается с I отрицательнь1м знаком (и частота вы- ходного напряжения второго инвертора 5 уменьшается).
При отклонении действительного угс ла jiarpy3KH от требуемого в системе управления электроприводом будут одновременно протекать два процесса автоматического регулирования: процесс стабилизации угла нагрузки (за счет
0 изменения второго питающего напряжения) и процесс стабилизации разности частот питающих напряжений (за счет изменения частоты первого питающего напряжения). Процессы регулирования
5 прекратятся после того, как рассогласование по углу нагрузки станет минимальным (в- идеале - равным нулю) . Оба процесса регулирования протекают автоматически благодаря самому прин0 ципу регулирования по отклонению с отрицательной обратной связью, используемому в данном случае. Зависимости разности частот питающих напряжений от частоты первого питающего напряжения и угла нагрузки от частоты
- второго питающего напряжения нелинейны. Однако эти нелинейности находятся внутри соответствующих контуров регум лирования и охвачены отрицательными
Q обратными связями, а в таком случае, как известно из теории автоматического управления, эти нелинейности практически не сказьшаются на качестве регулирования.
, Таким образом, в соответствии с предлагаемым способом- управления двигателем двойного питания нет необходимости выполнять источники питания (инверторы) с регулировкой амQ плитуды выходного напряжения, что в сравнении с известным решением определяет упрощение реализации, повышение экономичности и надежности системы управления. Формула изобретения
Способ управления двигателем двойного питания с двумя многофазными обмотками, при котором указанные обмотки подключают соответственно к
5
первому и второму многофазным питающим напряжениям переменного тока, устанавливают требуемую разность частот питающих напряжений пропорционально требуемой частоте вращения ротора и коэффи1шенту электрической редукции, измеряют текущее значение частот первого и второго питающих напряжений, вычитают текущее знача- ние частоты второго питающего налря- ,жения из текущего значения частоты первого питающего напряжения и сравнивают полученную разность с требуемой разностью частот питающих напря- личивают пропорционально рассогласожении, изменяют частоту первого питающего напряжения до величины, при которой текущее значение разности
частот питающих напряжений станет равной требуемой разности питающих напряжений, обеспечивая тем самым требуемую частоту вращения ротора двигателя, задают требуемый угол нагрузки и максимально допустимую величину рассогласования по углу нагрузки, изме- 25
20
срие.2
ряют действительный угол нагрузки, вычитают действительный угол нагрузки из требуемого угла нагрузки и используют полученный сигнал рассогласования для регулирования угла нагрузки, отличающийся тем, что, с целью упрощения реализации, определяют знаки требуемого угла нагрузки и рассогласования по углу нагрузки, сравнивают знак рассогласования по углу нагрузки со знаком требуемого угла нагрузки и, если указанные знаки совпадают, уве
ванию по углу нагрузки частоту второго питающего напряжения, а если указан-i ные знаки противоположны, то уменьшают пропорционально рассогласованию по углу нагрузки частоту второго питающего напряжения до тех пор, пока рассогласование по углу нагрузки не станет меньше максимально допустимой величины рассогласования по углу нагрузки.
./
сриг.З
| Электропривод | 1980 |
|
SU1059647A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод | 1979 |
|
SU855915A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
