Настоящее изобретение относится к тележке подвесной канатной дороги согласно ограничительной части пункта 1 формулы изобретения, крану канатной дороги согласно ограничительной части пункта 25 формулы изобретения, пассажирской гондоле согласно пункту 26 формулы изобретения, опорному башмаку согласно ограничительной части пункта 27 формулы изобретения, а также устройству согласно пункту 31 формулы изобретения.
Из уровня техники известны различные устройства, с помощью которых по несущему канату в гондолах могут транспортироваться пассажиры или грузы. Подобные устройства особенно находят применение для транспорта грузов и пассажиров в альпийской зоне, соответственно вдоль транспортных путей с большим подъемом. Из уровня техники особенно известны гондолы и канатные подвесные дороги, которые подвешены на несущем канате и перемещаются с помощью тягового каната по несущему канату.
Из уровня техники известны тележки подвесной канатной дороги, которые состоят из двух гусеничных цепей, которые опираются на канат и с приводом от двигателя могут перемещаться по этому канату.
Недостатки в известных из уровня техники системах состоят в том, что с одной стороны гондолы из-за перемещения тяговым канатом не могут двигаться автономно и, например, при обрыве тягового каната больше не могут двигаться. Дальше недостаток в известных системах состоит в том, что двигатели для движения гондол с помощью тягового каната в большинстве случаев должны иметь очень большие размеры и отсюда стоят очень дорого. В известных системах с гусеничными цепями, которые перемещаются по несущему канату, недостаток состоит в том, что прижимные устройства перемещаются и таким образом сцепление с канатом может быть только плохим или не может быть обеспечено совсем, и дальше конструкция очень сложная и вследствие высоких нагрузок требует тщательного технического обслуживания.
Задачей настоящего изобретения является создание тележки подвесной канатной дороги однажды названного вида, которая делает возможным автономный транспорт по несущему канату.
Эта задача решается с помощью отличительных признаков пункта 1 формулы изобретения. При этом предусмотрено, что предусмотрен прижимной механизм, который соединяет гусеницы друг с другом, причем расстояние между гусеницами может регулироваться с прижимным механизмом, причем прижимное усилие обеих гусениц друг к другу и/или прижимное усилие обеих гусениц к несущему канату может устанавливаться с прижимным механизмом,
- причем гусеничные цепи с помощью привода при помощи гусеничного движителя приводится в движение по замкнутому контуру, и, причем тележка подвесной канатной дороги может передвигаться по несущему канату.
С помощью прижимного механизма тележка подвесной канатной дороги может в двигаться вдоль в режиме свободного висения и с помощью изменения прижима к различным типам каната и диаметрам каната. Прижимной механизм воздействует на обе гусеницы, которые прижимаются, соответственно придавливаются, по отношению друг к другу, соответственно к несущему канату, чтобы обеспечить достаточное сцепление при одновременной минимальной нагрузке компонентов.
Особо предпочтительные формы осуществления тележки подвесной канатной дороги более подробно определяются с помощью признаков зависимых пунктов формулы изобретения:
Предпочтительное исполнение тележки подвесной канатной дороги получается благодаря тому, что прижимной механизм имеет первую часть рамы и вторую часть рамы, причем первая часть рамы и/или вторая часть рамы могут передвигаться вдоль средней оси, причем первая гусеница, в частности, в первом месте для опоры, на первой части рамы и вторая гусеница, в частности во втором месте для опоры, на второй части рамы, расположены, в частности с возможностью поворота друг к другу.
Особо предпочтительная форма осуществления тележки подвесной канатной дороги предусматривает, что прижимной механизм включает, по меньшей мере, пружинный зажимный элемент, который предварительно натягивает обе гусеницы в направлении друг к другу, в частности, при помощи первой части рамы и второй части рамы, и, что прижимной механизм включает, по меньшей мере, цилиндр предварительного натяжения, который противодействует силовому воздействию пружинного зажимного элемента.
С помощью предпочтительной компоновки пружинного зажимного элемента с цилиндром предварительного натяжения, в состоянии без давления, соответственно при остановке, может создаваться определенное удерживающее усилие, соответственно прижимное усилие. Дальше прижимное усилие в зависимости от давления в цилиндре предварительного натяжения может согласовываться с соответствующей ситуации при движении и таким образом может достигаться щадящая нагрузка на компоненты тележки подвесной канатной дороги.
Прижимное усилие обеих гусениц друг к другу или к несущему канату может еще более улучшаться, если прижимной механизм включает, по меньшей мере, прижимной цилиндр, с которым гусеницы с заданным давлением могут прижиматься друг к другу, причем преимущественно прижимной цилиндр расположен между первой частью рамы и второй частью рамы, соединяя их.
Предпочтительно предусмотрено, что прижимной цилиндр и цилиндр предварительного натяжения соединены соответственно с гидравлической системой, в частности, той же самой гидравлической системой с одинаковым давлением питания в общей гидравлической системе, причем прижимной цилиндр и цилиндр предварительного натяжения образованы и расположены таким образом, что силовое воздействие прижимного цилиндра и силовое воздействие цилиндра предварительного натяжения, в частности при 90 бар давления питания, осуществляется с одинаковой величиной, но противоположно по направлению, так что они взаимно нейтрализуют друг друга.
Управление прижимной силы может предпочтительно регулироваться в зависимости от мощности привода с помощью того, что давление в цилиндре предварительного натяжения может регулироваться пропорционально мощности привода, преимущественно с помощью регулятора давления, причем при начале движения тележки подвесной канатной дороги по несущему канату в цилиндре предварительного натяжения присутствует давление привода, и, что силовое воздействие цилиндра предварительного натяжения при наличии давления привода, в частности 90 бар, нейтрализует силовое воздействие пружинного зажимного элемента.
Предпочтительно предусмотрено, что силовое воздействие цилиндра предварительного натяжения ограничено, в частности, с помощью механического упора или максимального хода цилиндра предварительного натяжения, причем, в частности, повышение силового воздействия цилиндра предварительного натяжения может блокироваться при наличии давления привода.
Предпочтительная компоновка компонентов прижимного механизма получатся, если тележка подвесной канатной дороги имеет два пружинных зажимных элемента, два цилиндра предварительного натяжения и два прижимных цилиндра, которые, в частности, интегрированы в прижимном механизме, причем, преимущественно пружинные зажимные элементы, цилиндры предварительного натяжения и прижимные цилиндры расположены симметрично вокруг средней оси, в частности, на продольной стороне гусениц, в тележке подвесной канатной дороги.
Натяжение гусеничных цепей может особенно предпочтительно согласовываться с требованиям эксплуатационного состояния тележки подвесной канатной дороги, если каждая гусеница включает, по меньшей мере, натяжной цилиндр, который натягивает соответствующую гусеничную цепь и расположен, в частности, параллельно к противолежащим друг другу тракам гусениц гусеничных цепей.
Давление в цилиндрах и силовое воздействие цилиндров, соответственно прижимного механизма может особенно просто устанавливаться и задаваться, если цилиндр предварительного натяжения, прижимной цилиндр и/или натяжной цилиндр являются гидравлическими цилиндрами, работающими на масле, и соответственно присоединены к гидравлической системе, в частности к той же гидравлической системе с одинаковым давлением питания в общей гидравлической системе.
В предпочтительной форме осуществления предусмотрено, что пружинный зажимный элемент включает тарельчатые пружины, которые, в частности, расположены концентрично вокруг цилиндра предварительного натяжения.
Управление прижимным усилием в зависимости от мощности привода дальше предпочтительно может регулироваться, если давление питания цилиндра предварительного натяжения, прижимного цилиндра и/или натяжного цилиндра отрегулировано пропорционально мощности привода, причем, в частности, давление и расход рабочей жидкости в гидравлической системе может задаваться с помощью привода и привод питает гидравлическую систему.
Чтобы обеспечить предпочтительное автономное движение тележки подвесной канатной дороги, предусмотрено, что привод гусениц включает двигатели внутреннего сгорания и электродвигатели.
Предпочтительный привод гусениц предусматривает, что каждая гусеница, соответственно гусеничные цепи, соответственно напрямую приводятся в движение с помощью гидравлических двигателей, причем гидравлические двигатели преимущественно образованы одинаково и одинаково запитаны с помощью гидравлической системы.
Сцепление между гусеничными траками и несущим канатом предпочтительно становится лучше, если гусеничные траки захватывают, по меньшей мере, часть поперечного сечения несущего каната, причем, в частности, гусеничные траки первой гусеницы захватывают больше половины поперечного сечения несущего каната.
Беспилотное управление тележки подвесной канатной дороги достигается, если привод может управляться по радио.
Различие приводной мощности в гусеницах может особенно хорошо предотвращаться, если цилиндр предварительного напряжения, прижимной цилиндр и/или натяжные цилиндры соединены с программируемым блоком управления, причем давление в цилиндре предварительного натяжения и/или в прижимном цилиндре и/или натяжных цилиндрах, может изменяться преимущественно с помощью клапанов, регулирующих давление, которые присоединены к цилиндру предварительного натяжения и/или прижимному цилиндру, и/или натяжным цилиндрам, и, что при определенном с помощью блока управления проскальзывании одной или обеих гусениц или между гусеницами, давление в цилиндре предварительного натяжения и/или в прижимном цилиндре, и/или в натяжных цилиндрах, и/или приложенное с помощью прижимного механизма прижимное давление может изменяться. Дальше с помощью программируемого блока управления прижимное усилие, соответственно силовое воздействие отдельных цилиндров может согласовываться с условиями движения и таким образом эффективно предотвращаться проскальзывание между гусеницами или пробуксовка гусениц на несущем канате.
Чтобы в аварийной ситуации иметь возможность быстро остановить тележку подвесной канатной дороги, предусмотрено, что привод имеет тормозной механизм, с которым привод может затормаживаться, причем тормозной механизм включает преимущественно тарельчатые пружины.
В предпочтительной форме осуществления предусмотрено, что каждая гусеница включает соответственно привод, причем соответствующий привод приводит в движение соответствующий гусеничный движитель и преимущественно имеет соответственно тормозной механизм.
Предпочтительно предусмотрено, что на тележке подвесной канатной дороги расположена гондола для транспорта пассажиров и/или груза, причем гондола, в частности, с помощью шарнира присоединена к соединительному рычагу, который преимущественно соединен с первой частью рамы прижимного механизма.
В известных из уровня техники гусеничных системах имеется недостаток, что усилия и нагрузки неравномерно распределены в гусеничном движителе, в результате чего вызывается повышенная нагрузка компонентов гусеничного движителя, которые из-за этого должны иметь большие размеры или чаще заменяться, соответственно чаще выходят из строя.
Поэтому другим аспектом настоящего изобретения является создание тележки подвесной канатной дороги однажды названного вида, которая позволяет равномерное распределение нагрузки внутри гусеничного движителя.
Эта задача решается с помощью отличительных признаков пункта 21 формулы изобретения. При этом предусмотрено, что, по меньшей мере, гусеничный движитель включает сбалансированный ходовой механизм для равномерного распределения усилий в гусеничном движителе, причем сбалансированный ходовой механизм имеет количество расположенных в форме каскада в количестве ступеней уравнительных коромысел, которые образованы аналогично коромысловым весам, причем каждое уравнительное коромысло имеет центральную точку вращения и две расположенных на одинаковом расстоянии от центральной точки вращения, в частности вблизи конца каждого уравнительного коромысла, концевые точки вращения, причем центральная точка вращения уравнительного коромысла первой ступени расположена с возможностью поворота на прижимном механизме, в частности, вокруг первого места для опоры или второго места для опоры, причем в концевых точках вращения уравнительных коромысел каждой ступени с возможностью поворота расположена центральная точка вращения соседнего уравнительного коромысла следующей ступени, причем уравнительные коромысла второй ступени соответственно со своими центральными точками вращения расположены в концевых точках вращения уравнительного коромысла первой ступени и в концевых точках вращения уравнительного коромысла второй ступени с возможностью поворота расположены соответственно уравнительные коромысла третьей ступени с их центральными точками вращения, и т.д., причем в концевых точках вращения уравнительных коромысел последней ступени расположено количество опорных катков, причем опорные катки установлены с возможностью вращения вокруг концевых точек вращения уравнительных коромысел последней ступени. и, причем опорные катки могут располагаться в соответствующей гусеничной цепи на, по меньшей мере, гусеничном траке.
С помощью формирования сбалансированного ходового механизма, соответственно уравнительных коромысел по принципу коромысловых весов, удары и неровности могут улавливаться гусеничным движителем. Дальше становится возможным переезд без ударов через мачту, соответственно седловую опору для каната на мачте.
Расстояние между опорой гусеницы и цепями может предпочтительно задаваться, если соответственно концевые точки вращения соответствующего уравнительного коромысла имеют расстояние вдоль высоты к соответствующей центральной точке вращения того же самого уравнительного коромысла, причем соединительные линии концевых точек вращения с соответствующими центральными точками вращения уравнительного коромысла образуют равнобедренный треугольник, причем, в частности, расстояние концевых точек вращения от центральных точек вращения вдоль высоты каждого уравнительного коромысла в отдельных ступенях одинаково. Дальше, таким образом в сбалансированном ходовом механизме достигается предпочтительное распределение нагрузки.
Особенно удачная и предпочтительная форма осуществлении предусматривает, что сбалансированный ходовой механизм имеет три ступени расположенных уравнительных коромысел, причем соответственно концевые точки вращения соответствующих уравнительных коромысел имеют расстояние вдоль высоты к соответствующим центральным точкам вращения, причем соединительные линии концевых точек вращения с соответствующими центральными точками вращения образуют равнобедренный треугольник.
Предпочтительное распределение усилий в сбалансированных ходовых механизмах достигается просто, если в каждой концевой точке вращения каждой ступени расположены с возможностью поворота соответственно два уравнительных коромысла, причем соответствующие два уравнительных коромысла расположены соответственно на стороне уравнительного коромысла предыдущей ступени.
Предпочтительный кран канатной дороги для транспорта груза на несущем канате получается, если кран канатной дороги включает, по меньшей мере, одну, в частности, две такого рода тележки подвесной канатной дороги, причем кран канатной дороги, в частности, подвешен к двум тележкам подвесной канатной дороги.
Предпочтительная пассажирская гондола для транспорта пассажиров на несущем канате создается с помощью того, что пассажирская гондола включает, по меньшей мере, одну, в частности, две такого рода тележки подвесной канатной дороги, причем пассажирская гондола, в частности, подвешена, к двум тележкам подвесной канатной дороги.
Другая сторона изобретения заключается в создании особо подходящей седловой опоре для каната для предложенной в соответствии с изобретением тележки подвесной канатной дороги. При этом предусмотрено, что седловая опора для каната, которая может переезжаться подобного рода тележкой подвесной канатной дороги, включает подвеску и, по меньшей мере, расположенный на подвеске соединительный элемент для крепления к мачте, отличается тем, что на подвеске расположена опора для несущего каната, причем опора для каната имеет удлиненную поверхность прилегания для каната, на которую может укладываться несущий канат, причем поверхность прилегания для каната имеет количество число упруго пружинящих частичных участков, и, причем частичные участки могут упруго прогибаться преимущественно нормально к поверхности прилегания для каната.
Подпружиненная седловая опора для каната может особенно предпочтительно создаваться, если опора для каната включает количество пластинчатых пружин, которые расположены рядом друг с другом, причем пластинчатые пружины образуют поверхность прилегания и могут упруго деформироваться по отношению друг к другу.
Предпочтительно предусмотрено, что подвеска образована в виде L-образной консоли с первой частью и второй частью, причем первая часть в длину больше второй части, причем соединительный элемент расположен на второй части и опора для каната расположена на первой части с установкой с возможностью вращения.
Особо предпочтительная форма осуществления седловой опоры для каната получается, если поверхность прилегания каната образует изогнутую поверхность.
Другой задачей изобретения является создание устройства, с которым становится простым транспорт грузов или пассажиров по несущему канату. Эта задача решается с помощью признаков пункта 31 формулы изобретения. При этом устройство для транспорта грузов или пассажиров по несущему канату включает седловую опору для каната по одному из пп. 27 - 30 формулы изобретения, причем седловая опора для каната закреплена на мачте на подвеске, причем устройство включает лежащий на поверхности прилегания для каната седловой опоры для каната несущий канат, причем на несущем канате закреплена пассажирская гондола по п. 26 формулы изобретения или кран для канатной дороги по п. 25 формулы изобретения и/или, по меньшей мере, тележка подвесной канатной дороги по одному из пп. 1- 24 таким образом расположена на несущем канате, что несущий канат находится между противолежащими траками гусениц гусеничных цепей.
Другие преимущества и варианты исполнения изобретения следуют из описания и прилагающихся чертежей.
Изобретение ниже схематично представлено на чертежах с помощью особо предпочтительных, но не ограничивающих, подлежащих пониманию примеров осуществления и в качестве примера описывается со ссылкой на чертежи.
На чертежах представлено следующее:
Фиг. 1 показывает во фронтальном виде форму осуществления предложенной в соответствии с изобретением тележки подвесной канатной дороги с прижимным механизмом.
Фиг. 2 показывает в аксонометрии вторую форму осуществления тележки подвесной канатной дороги.
Фиг. 3-6 показывают общий вид, вид спереди и боковую проекцию, а также вид в аксонометрии форму осуществления прижимного механизма тележки подвесной канатной дороги.
Фиг. 7 показывает поперечный разрез цилиндра предварительного натяжения формы осуществления прижимного механизма.
Фиг. 8 показывает поперечный разрез формы осуществления прижимного механизма.
Фиг. 9 показывает диаграмму силового воздействия формы осуществления прижимного механизма тележки подвесной канатной дороги.
Фиг. 10 показывает другую форму осуществления предложенной в соответствии с изобретением тележки подвесной канатной дороги со сбалансированным ходовым механизмом во фронтальном виде.
Фиг. 11 показывает вид в аксонометрии другой формы осуществления тележки подвесной канатной дороги со сбалансированным ходовым механизмом.
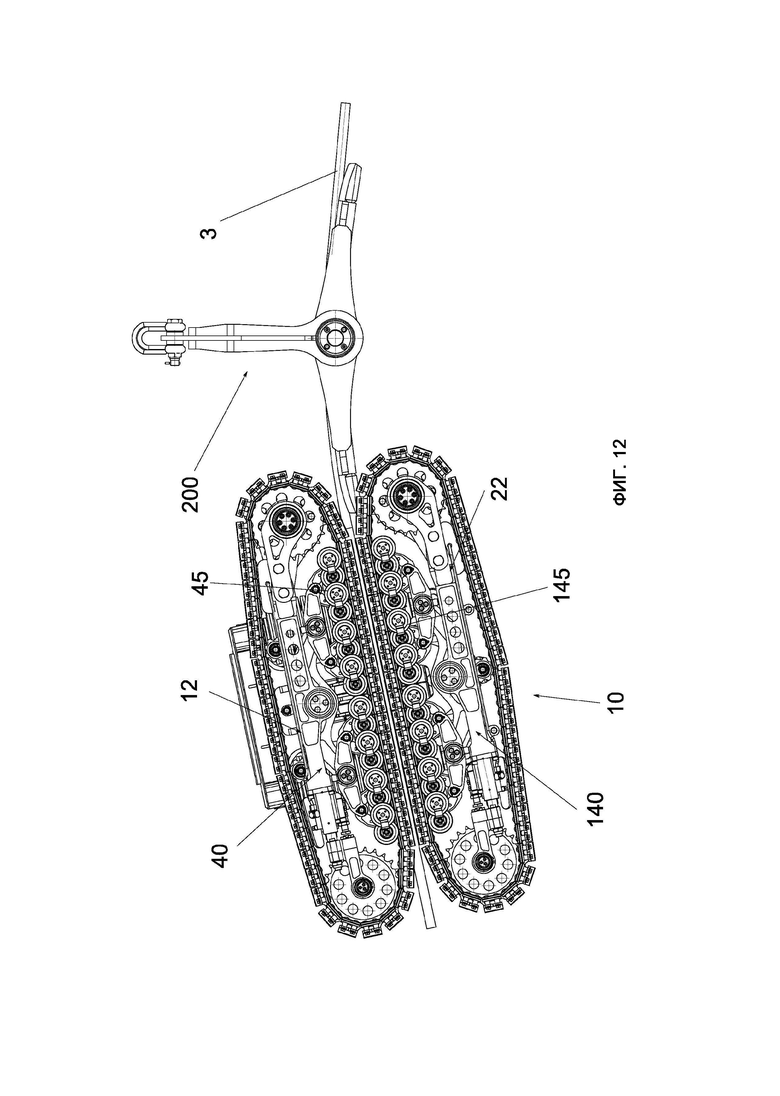
Фиг. 12 показывает форму осуществления тележки подвесной канатной дороги при въезде на опорный башмак.
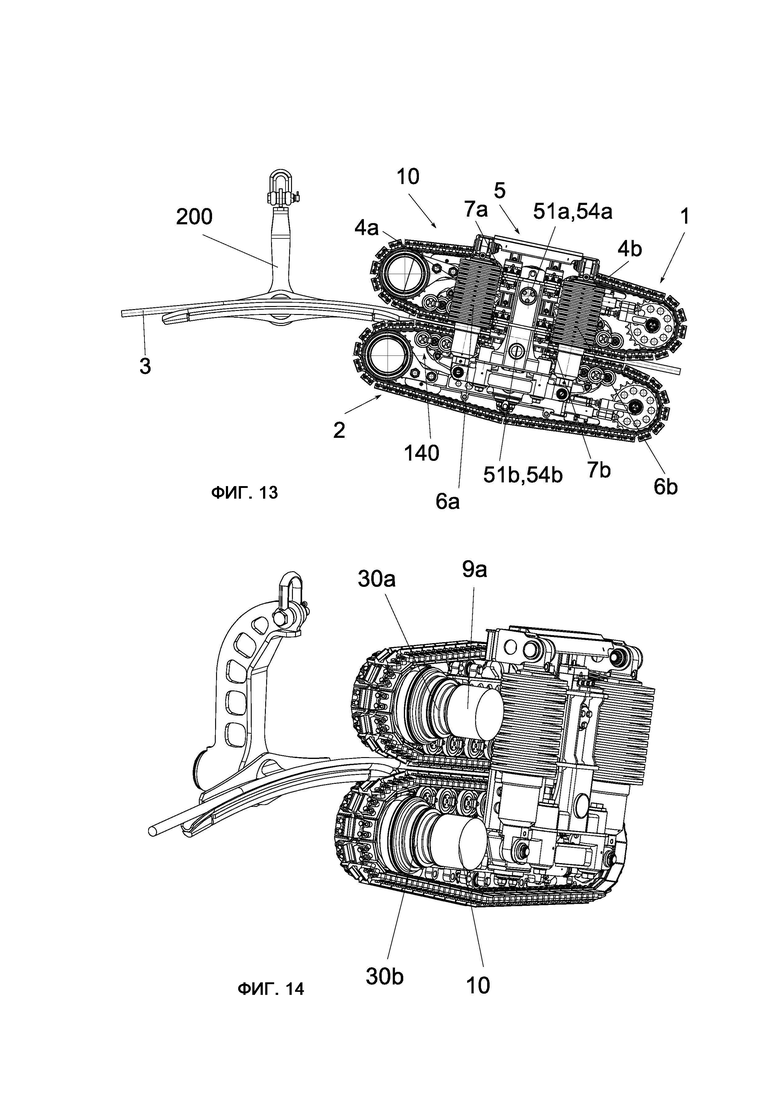
Фиг. 13 и 14 во фронтальном виде и в аксонометрии показывают другую форму осуществления тележки подвесной канатной дороги со сбалансированным ходовым механизмом и прижимным механизмом.
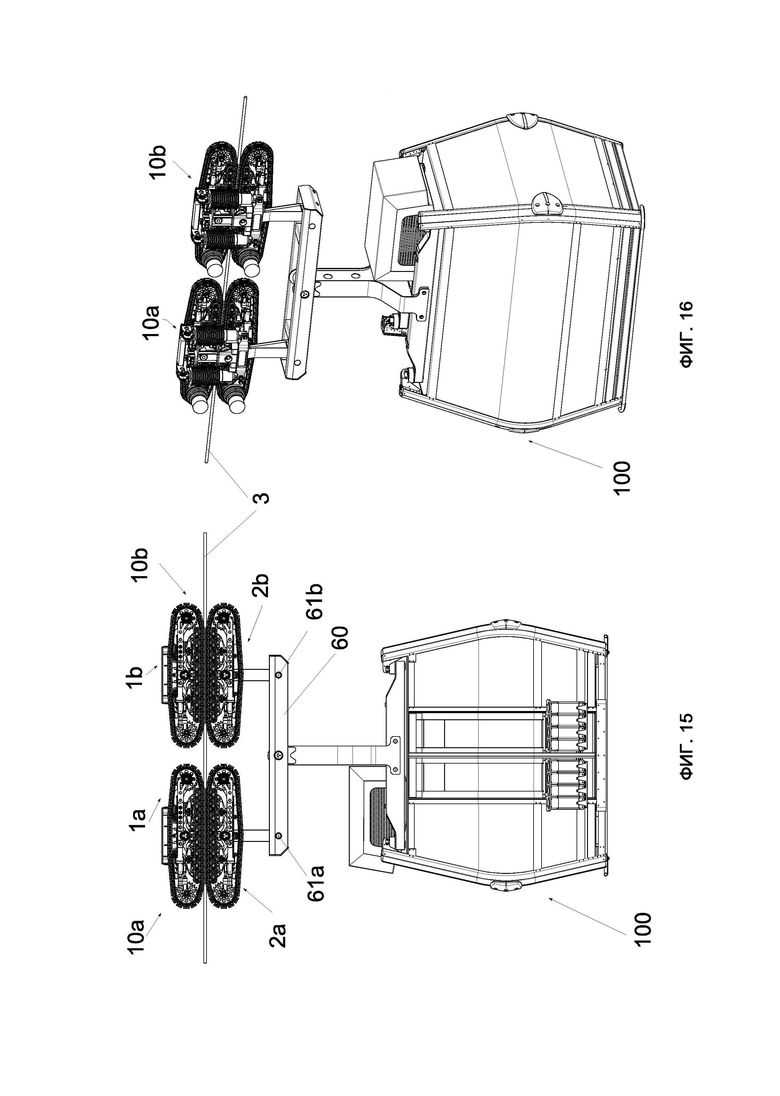
Фиг. 16 и 17 во фронтальном виде и в аксонометрии показывают форму осуществления пассажирской гондолы с формой осуществления двух тележек подвесной канатной дороги.
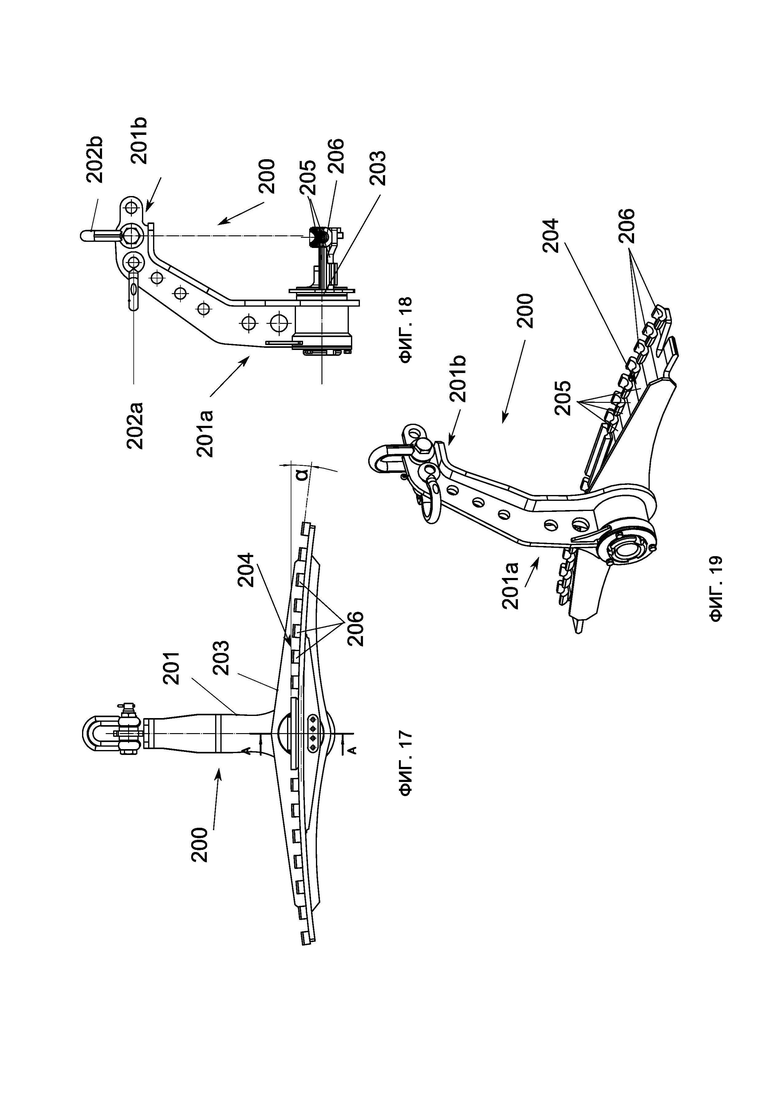
Фиг. 17-19 показывают фронтальный вид, боковую проекцию, а также вид в аксонометрии предложенного в соответствии с изобретением опорного башмака для каната.
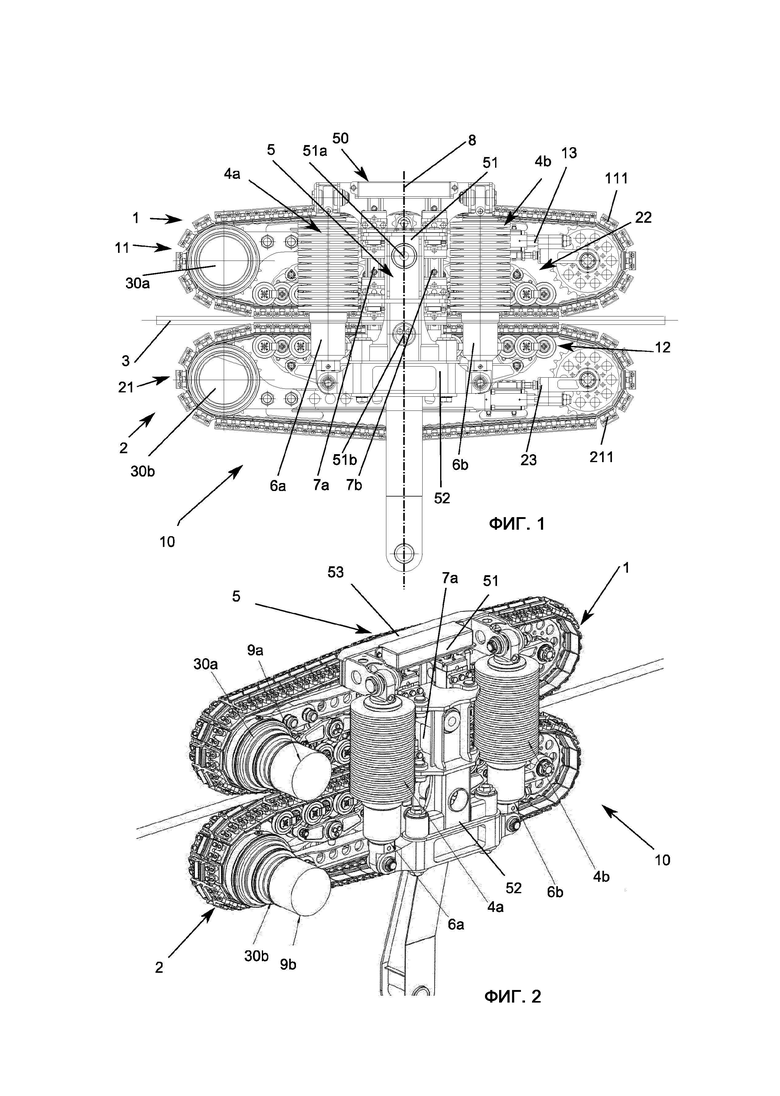
Фиг. 1 показывает во фронтальном виде форму осуществления предложенной в соответствии с изобретением тележки подвесной канатной дороги для транспорта грузов или пассажиров. Тележка 10 подвесной канатной дороги включает две противолежащие расположенные друг над другом в одной плоскости гусеницы 1, 2, причем гусеницы 1, 2 включают соответственно гусеничную цепь 11, 12. Количество траков 111, 211 гусениц образует соответственно замкнутую гусеничную цепь 11, 21 гусениц 1, 2. Гусеничные цепи 11, 12 расположены лежащими друг против друга на расстоянии друг к другу и несущий канат 3 расположен между обеими гусеницами 1, 2 в гусеничных цепях 11, 21, соответственно в траках 111, 211 гусениц. Траки 111, 211 гусениц захватывают соответственно часть поперечного сечения несущего каната 3. Траки 111 первой гусеницы 1 в этой форме осуществления захватывают больше половины поперечного сечения несущего каната 3 и выходят за среднюю плоскость несущего каната 3 в направлении траков 211 второй гусеницы 2, траки 211 второй гусеницы 2 охватывают точно также часть поперечного сечения несущего каната 3, причем эта часть меньше половины поперечного сечения.
Тележка 10 подвесной канатной дороги включает прижимной механизм 5, который соединяет гусеницы 1, 2 друг с другом, расстояние обеих гусениц 1, 2 друг к другу задается, соответственно устанавливается, и прижимное усилие обеих гусениц 1, 2 к несущему канату 3, соответственно друг к другу, задается. Тележка 10 подвесной канатной дороги включает привод 30, который при помощи гусеничного движителя 12, соответственно 22, приводит в движение соответствующие гусеницы 1, 2 и гусеницы 1, 2, соответственно тележка 10 подвесной канатной дороги, движется, соответственно передвигается, по несущему канату 3. Привод 30 в этой форме осуществления выполнен состоящим из двух секций, причем каждая гусеница 1, 2 включает соответственно секционный привод 30а, соответственно 30b. Секционный привод 30а первой гусеницы 1, соответственно секционный привод 30b второй гусеницы 2 приводит в движение соответственно гусеничную цепь 11, соответственно 21, через зубчатое ведущее колесо, которое входит в зацепление с траками 111 гусеницы, соответственно 211. Прижимной механизм 5 в этой форме осуществления включает два цилиндра 6а, 6b предварительного натяжения, которые расположены симметрично к проходящей нормально к несущему канату 3 наряду с гусеницами 1, 2 средней оси 8. Вокруг цилиндров 6а, 6b соответственно расположен пружинный зажимный элемент 4а, 4b, который в этой форме осуществления образован в виде пакета тарельчатых пружин. Прижимной механизм 5 включает раму 50, которая имеет первую часть 51 рамы и вторую часть 52 рамы, которые могут передвигаться друг к другу вдоль средней оси 8. На первой части 51 рамы 50 в первом месте 51а для опоры установлена первая гусеница 1. Вторая гусеница 2 установлена во втором месте 51b для опоры на второй части 52а рамы 50. Места для опоры 51а, 51b гусениц 1, 2 образованы соответственно вращательным шарниром, причем гусеницы 1, 2 соответственно сами по себе могут вращаться, соответственно поворачиваться вокруг места для опоры 51а, соответственно 51b. С помощью прижимного механизма 5 задается расстояние между первой гусеницей 1 и второй гусеницей 2, соответственно между местами для опоры 51а, 51b рамы 50. Прижимной механизм 5 оказывает силовое воздействие вдоль средней оси 8 на гусеницы 1, 2, соответственно между первой частью 51 рамы и второй частью 52 рамы. Расстояние между первой гусеницей 1 и второй гусеницей 2 при этом задается и задается прижим обеих гусениц 1, 2 по отношению друг к другу вдоль средней оси 8, соответственно прижим гусениц 1, 2 к несущему канату 3.
Фиг. 2 показывает вид в аксонометрии формы осуществления тележки 10 подвесной канатной дороги. Пружинные зажимные элементы 4а, 4b выполнены в виде тарельчатых пружин и осуществляют силовое воздействие первой части 51 рамы по отношению ко второй части рамы 50. Действующие в качестве пружин сжатия тарельчатые пружины пружинных зажимных элементов 4а, 4b при увеличении расстояния между тарельчатыми пружинами соответственно осуществлении сжимающего усилия на рычаг 53, который закреплен на первой части 51 рамы 50, способствуют сближению, соответственно прижиманию первой гусеницы 1 ко второй гусенице 2. Цилиндры 6а, соответственно 6b, предварительного натяжения имеют одинаковую действительную ось, что и пружинные зажимные элементы 4а, 4b, однако силовое воздействие цилиндров 6а. 6b предварительного натяжения образовано противоположно пружинным зажимным элементам 4а, 4b. Таким образом, цилиндры 6а, 6b предварительного натяжения с возрастающим силовым воздействием постепенно нейтрализует действующее благодаря пружинным зажимным элементам 4а, 4b на гусеницы 1, 2 прижимное усилие.
Функционирование форм осуществления прижимного механизма 4 на фиг. 1 и фиг. 2 осуществляется при этом следующим образом:
При стоянке действует полное прижимное усилие пружинных зажимных элементов 4а, 4b на первую гусеницу 1, соответственно на вторую гусеницу 2, причем они максимально сжимаются и на канат 3 оказывается действие удерживающего усилия. При включении тележки 10 подвесной канатной дороги силовое воздействие цилиндров 6а, 6b предварительного натяжения повышается и таким образом общее прижимное действие между первой гусеницей 1 и второй гусеницей 2 уменьшается, в результате чего облегчается, соответственно становится возможным, движение тележки подвесной канатной дороги по несущему канату 3 при помощи привода 30, соответственно при помощи обоих секционных приводов 30а, 30b. C возрастающей скоростью движения прижимное давление вследствие повышения давления в цилиндрах 6а, 6b предварительного натяжения уменьшается и таким образом делает возможной повышенную скорость движения, соответственно уменьшенное трение.
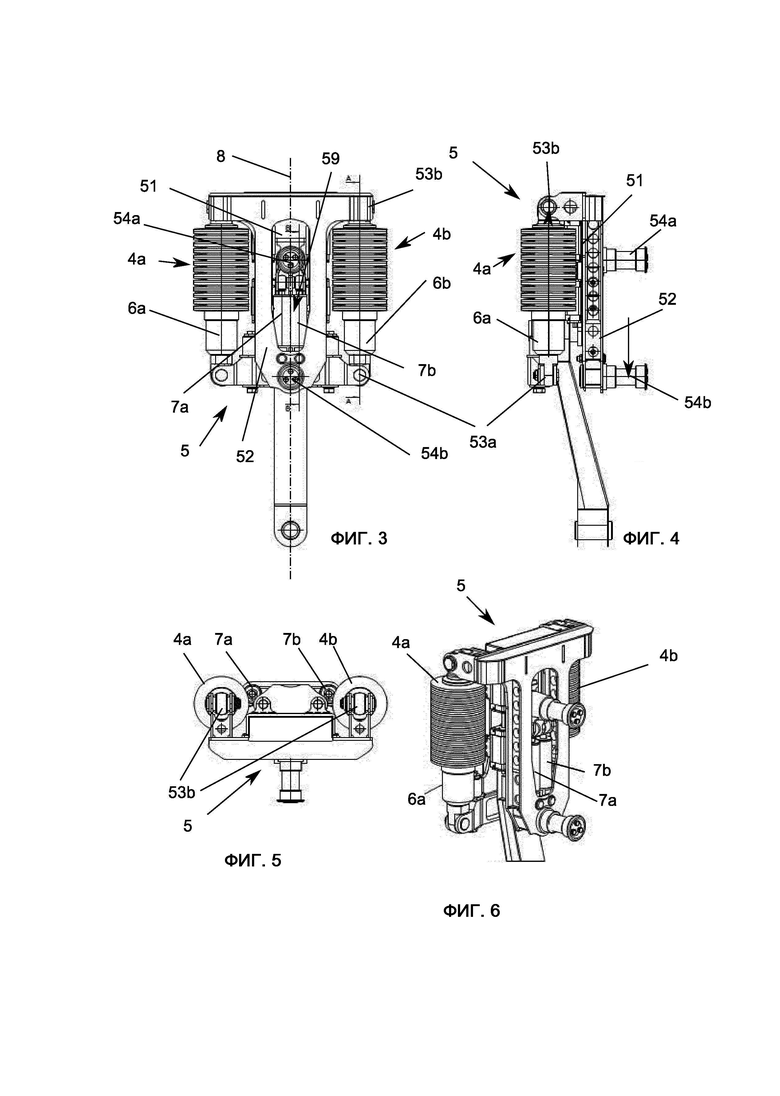
На фиг. 3-6 во фронтальном виде (фиг. 3), в виде сбоку (фиг. 4), в виде сверху (фиг. 5) и аксонометрическом виде (фиг. 6) представлена предпочтительная форма осуществления прижимного механизма 5. Рама 50 прижимного механизма 5 в этой форме осуществления точно также выполнена из двух частей, причем прижимной механизм 5 включает первую часть 51 рамы и вторую часть 52 рамы. Вторая часть 52 рамы может передвигаться вдоль средней оси 8 на расстояние к первой части 51 рамы, причем вторая часть 52 рамы скользит на первой части 51 рамы. На первой части 51 рамы расположена коренная цапфа 54а и на второй части 52 рамы расположена вторая коренная цапфа 54b. Первая коренная цапфа 54а пронизывает вторую часть рамы 52 в выемке 59. На первой коренной цапфе 54а первая гусеница 1 через место 51а для опоры соединена с рамой 50 и вторая гусеница 2 через вторую коренную цапфу 54b со второй опорой 51b расположена на второй части 52 рамы. Форма осуществления на фиг. 3-6 имеет расположенные симметрично вокруг средней оси 8 пружинные зажимные элементы 4а, 4b и расположенные концентрично к пружинным зажимным элементам 4а, 4b цилиндры 6а, 6b предварительного натяжения. Цилиндры 6а, 6b предварительного натяжения и пружинные элементы 4а, 4b присоединены с помощью шарниров соответственно к первой части 51 рамы и ко второй части 52 рамы 50, причем цилиндр 6а, 6b предварительного натяжения соединяет часть 51 рамы со второй частью 52 рамы. Один конец соответствующего цилиндра 6а, 6b предварительного натяжения присоединен с помощью шарнира в точке 53а шарнирного присоединения первой части 51 и второй конец соответствующего цилиндра 6а, 6b предварительного натяжения в точке 53b шарнирного присоединения второй части 52. При увеличении расстояния между тарельчатыми пружинами пружинного элемента 4а, соответственно 4b, вторая часть 52 рамы передвигается по отношению к первой части 51 рамы 50 вдоль средней оси 8, причем расстояние между второй частью 52 рамы и первой частью 51 рамы, соответственно коренной цапфой 54а, соответственно 54b, увеличивается. Первая часть 51 рамы при этом установлена в подшипниках в раме 50 и может осуществлять поступательное движение относительно второй части 52 рамы. Силовое воздействие цилиндров 6а, 6b предварительного натяжения образовано противоположно по направлению силовому воздействию пружинных зажимных элементов 4а, 4b, вследствие чего происходит нейтрализация силового воздействия в зависимости от приложения давления в цилиндрах 6а, 6b предварительного натяжения.
Фиг. 4 показывает результирующее силовое воздействие, соответственно влияние работы цилиндров 6а, соответственно 6b предварительного натяжения, с пружинными элементами 4а, 4b на раму 50. Через раму 50 при приложении результирующего усилия сжатия в первой точке 53b шарнирного присоединения второй части 52 через шарнирное присоединение цилиндров 6а, 6b предварительного натяжения между первой частью 51 рамы и второй частью 52 рамы 50 осуществляется приближение коренных цапф 54а, соответственно 54b, друг к другу.
В показанной на фиг. 3-6 форме осуществления прижимной механизм 5 дальше имеет два прижимных цилиндра 7а, 7b. Прижимные цилиндры 7а, 7b расположены симметрично по отношению к средней оси 8 и шарнирно соединены между первой частью 51 рамы и второй частью 52 рамы 50. Прижимные цилиндры 7а, 7b при этом осуществляют силовое воздействие вдоль средней оси 8. Прижимной механизм 5 включает механизм установления пределов усилия, которое ограничивает усилие цилиндров 6а, 6b предварительного натяжения. Механизм установления пределов усилия цилиндров 6а, 6b предварительного натяжения может быть образован при этом в виде упора или устроен в виде максимального хода поршня цилиндров 6а, 6b предварительного натяжения Установлении пределов усилия цилиндров 6а, 6b предварительного натяжения влечет за собой максимальное силовое воздействие обоих цилиндров 6а, 6b предварительного натяжения, которое соответствует максимальному усилию пружинных элементов 4а, 4b. Цилиндры 6а, 6b предварительного натяжения и прижимные цилиндры 7а, 7b могут быть выполнены в виде работающих на масле гидравлических цилиндров и питаться через гидравлическую систему с давлением питания. Изменение давления питания в гидравлической системе влечет за собой при этом изменение силового воздействия цилиндров 6а, 6b предварительного натяжения, соответственно прижимных цилиндров 7а, 7b.
В предпочтительной форме осуществления давление в цилиндрах 6а, 6b предварительного натяжения регулируется пропорционально мощности привода 30, причем при начале движения тележки 10 подвесной канатной дороги по несущему канату 3 в цилиндре 6а, 6b предварительного натяжение приложено давление привода. При наличии давления привода в цилиндрах 6а, 6b предварительного натяжения силовое воздействие пружинных элементов 4а, 4b нейтрализуется и таким образом снимается прижим обеих гусениц 1, 2 друг к другу. Предпочтительно может быть предусмотрено, что прижимной механизм 5 имеет ограничитель усилия для силового воздействия цилиндров 6а, 6b предварительного натяжения и ограничитель усилия при повышении давления питания свыше давления привода предотвращает повышение усилия цилиндров 6а, 6b предварительного натяжения. Это может происходить при помощи упора или путем конструктивного исполнения цилиндров 6а, 6b предварительного напряжения с максимальным ходом поршня.
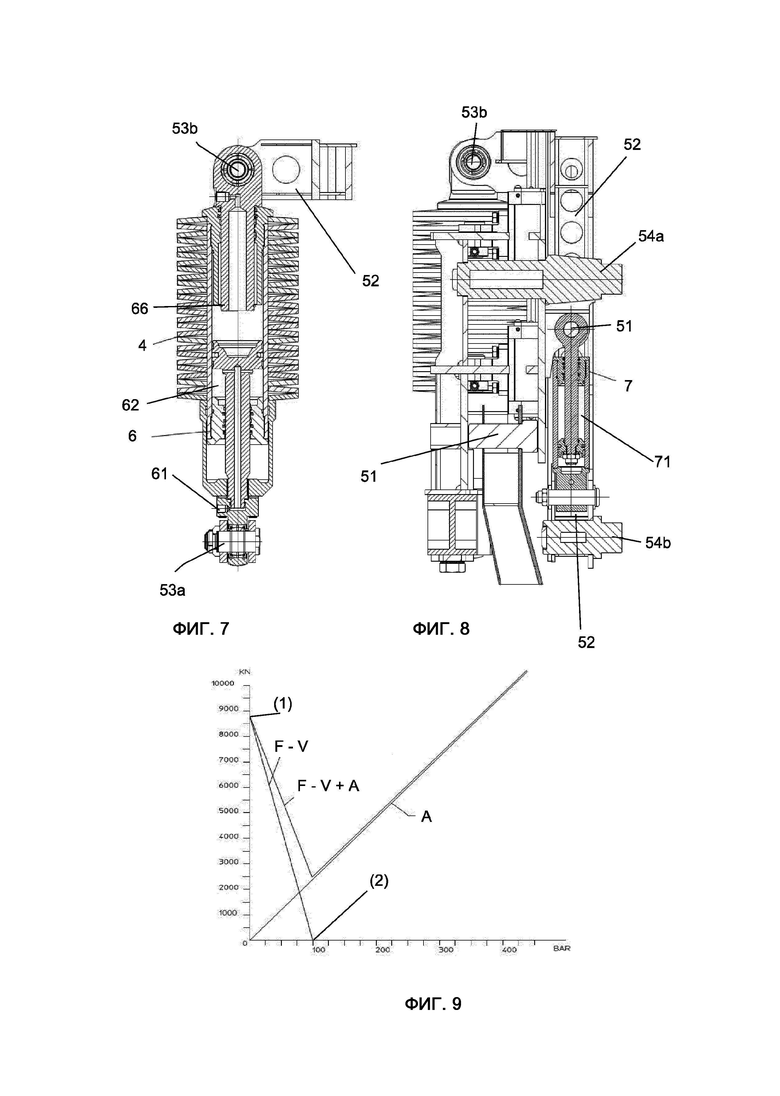
Прижимные цилиндры 7а, 7b создают силовое воздействие, противоположное по направлению цилиндрам 6а, 6b предварительного натяжения, соответственно направленное в одном направлении силовое воздействие по отношению к пружинным зажимным элементам 4а, 4b, вследствие чего при повышении давления питания в прижимных цилиндрах 7а, 7b вторая часть рамы приближается к первой рамной части 51, соответственно их расстояние уменьшается или прижимное давление между гусеницами 1, 2 увеличивается. Фиг. 7 показывает поперечный разрез по цилиндру 6 предварительного натяжения предложенной в соответствии с изобретением формы осуществления прижимного механизма 5. Вокруг боковой поверхности цилиндра 6 предварительного натяжения концентрично к оси цилиндра 6 предварительного натяжения расположен пружинный зажимный элемент 4. Силовое воздействие цилиндра 6 предварительного натяжения, соответственно пружинного зажимного элемента 4, аналогично описанным на фиг. 1-6 формам осуществления, направлено противоположно друг другу. Пружинный зажимный элемент 4 вызывает силовое воздействие вдоль оси цилиндра 6 предварительного натяжения, причем вызывается увеличение расстояния между шарнирным соединением 53а первой части 51 рамы к шарнирному соединению 53b второй части 52 рамы. Через впускное отверстие 61 масло поступает в образованный в виде работающего на масле гидравлического цилиндра цилиндр 6 предварительного натяжения в камеру 62 для масла и цилиндр 6 предварительного натяжения осуществляет силовое воздействие вдоль оси цилиндра 6 предварительного натяжения против силового воздействия пружинного зажимного элемента 4, вследствие чего расстояние между шарнирным соединением 53а первой части 51 рамы и шарнирным соединением 53b второй части 52 рамы уменьшается. Силовое воздействие пружинного зажимного элемента 4 таким образом при повышении давления питания в цилиндре 6 предварительного натяжения постепенно уменьшается и результирующее силовое воздействие между первой частью 51 рамы и второй частью 52 рамы 50, соответственно с помощью прижимного механизма уменьшается. С помощью исполнения прижимного механизма 5 как на фиг. 1-2, соответственно фиг. 3-6, таким образом может изменяться силовое воздействие прижимного механизма 5, соответственно на гусеницы 1и 2, относительно прижима друг к другу, соответственно на несущий канат 3. С помощью установления пределов хода перемещения цилиндра 6 предварительного натяжения, как представлено на фиг. 7, с помощью упора 66, ограничивается максимальное силовое воздействие цилиндра 6 предварительного натяжения.
Фиг. 8 показывает разрез вдоль оси прижимного цилиндра 7. Прижимной цилиндр 7 расположен между первой частью 51 рамы и второй частью 52 рамы 50 прижимного механизма 5. При повышении давления питания в камере 71 для масла образованного в виде работающего на масле гидроцилиндра прижимного цилиндра 7 осуществляется движение поршня прижимного цилиндра 7, вследствие чего расстояние коренных цапф 54а, 54b друг к другу уменьшается, соответственно силовое воздействие коренных цапф 54а, 54b друг на друга повышается.
Представленный на фиг. 7 цилиндр 6 предварительного напряжения может предпочтительно применяться в формах осуществления на фиг. 1 и 2, соответственно 3-6, прижимного механизма 5 и особенно предпочтительно комбинироваться с прижимным цилиндром 7 на фиг. 8, соответственно двумя прижимными цилиндрами 7а, 7b, как представлено на фиг. 3-6.
Фиг. 9 показывает диаграмму силового воздействия в форме осуществления тележки 10 подвесной канатной дороги с предложенным в соответствии с изобретением прижимным механизмом 5. Прижимной механизм 5 при этом включает, по меньшей мере, цилиндр 6 предварительного натяжения, пружинный зажимный элемент 4 и расположенный соответственно фиг. 8 прижимной цилиндр 7. Координата Y в качестве примера показывает силовое воздействие отдельных частей прижимного механизма, причем ось Х представляет давление питания в цилиндре 6 предварительного натяжения и прижимном цилиндре 7. Исходя из максимального силового воздействия пружинного зажимного элемента 4 (см. точку (1)) при повышении давления питания вследствие силового воздействия V цилиндра 6 предварительного натяжения силовое воздействие F пружинного зажимного элемента 4 уменьшается, причем одновременно происходит повышение силового воздействия А прижимного цилиндра 7. Вследствие повышения давления питания в цилиндре 6 предварительного натяжения и прижимном цилиндре 7 силовое воздействие F - V + A прижимного механизма уменьшается пока силовое воздействие F пружинного зажимного элемента 4 не будет полностью нейтрализовано (2) вследствие силового воздействия V цилиндра 6 предварительного натяжения и к прижимному механизму 5 будет прилагаться только силовое воздействие А прижимного цилиндра 7. При дальнейшем повышении давления питания в прижимном цилиндре 7 еще больше повышается прижимное усилие обеих гусениц 1, 2 друг к другу, соответственно прижимное усилие прижимного механизма 5. Нейтрализация силового воздействия F пружинного зажимного элемента 4 силовым воздействием V цилиндра 6 предварительного натяжения достигается предпочтительно при приложении давления привода около 90 бар. При этом в системе питания прилагается давление питания, когда тележка 10 подвесной канатной дороги приводится в движение с помощью привода 30 и тележка 10 подвесной канатной дороги начинает двигаться по несущему канату 3. Благодаря нейтрализации силового воздействия F пружинного зажимного элемента 4 силовым воздействием V цилиндра 6 предварительного натяжения при начале движения тележки 10 подвесной канатной дороги осуществляется оптимальное силовое воздействие прижимного механизма 5, соответственно оптимальное прижимное усилие между первой гусеницей 1 и второй гусеницей 2, которое обеспечивает продление срока эксплуатации конструктивных элементов тележки 10 подвесной канатной дороги при одновременном оптимальном прижимном действии.
Прижимной цилиндр 7, соответственно прижимные цилиндры 7а. 7b, цилиндр 6 предварительного натяжения, соответственно цилиндры 6а. 6b в показанных на фиг. 1-8 формах осуществления могут быть выполнены в виде работающих на масле гидравлических цилиндров и соответственно могут быть присоединены к гидравлической системе, причем цилиндры присоединены, в частности к той самой гидравлической системе с одинаковым давлением питания, соответственно с одинаковым режимом питания в общей гидравлической системе. Дальше гидравлическая система с помощью клапанов давления или программируемого блока управления может регулироваться пропорционально мощности привода 30.
Давление питания цилиндра 6 предварительного натяжения, соответственно цилиндров 6а, 6b предварительного натяжения, прижимного цилиндра 7, соответственно прижимных цилиндров 7а, 7b может регулироваться пропорционально мощности привода 30, причем давление и расход рабочей жидкости в гидравлической системе задается с помощью привода 30, причем привод 30, в частности, питает гидравлическую систему и таким образом в гидравлических цилиндрах может достигаться повышающиеся с мощностью привода 30 давление, соответственно расход рабочей жидкости.
В качестве альтернативы предложенная в соответствии с изобретением тележка 10 подвесной канатной дороги может снабжаться тормозным механизмом 9, который, например, интегрирован в приводе 30. При этом тормозной механизм 9 может быть образован в виде аварийного тормозного механизма и может тормозить при отказе привода или отдельных частей гусениц 1, 2 и таким образом останавливать тележку 10 подвесной канатной дороги.
Фиг. 1 и 2 показывают возможную форму осуществления тормозного механизма 9. Соответствующие приводы 30а, 30b гусениц 1, 2 могут быть дополнены тормозным механизмом 9а, соответственно тормозным механизмом 9b. Тормозной механизм 9а, соответственно 9b, может включать тарельчатые пружины, которые оказывают на соответствующий привод 30а, 30b тормозящее действие.
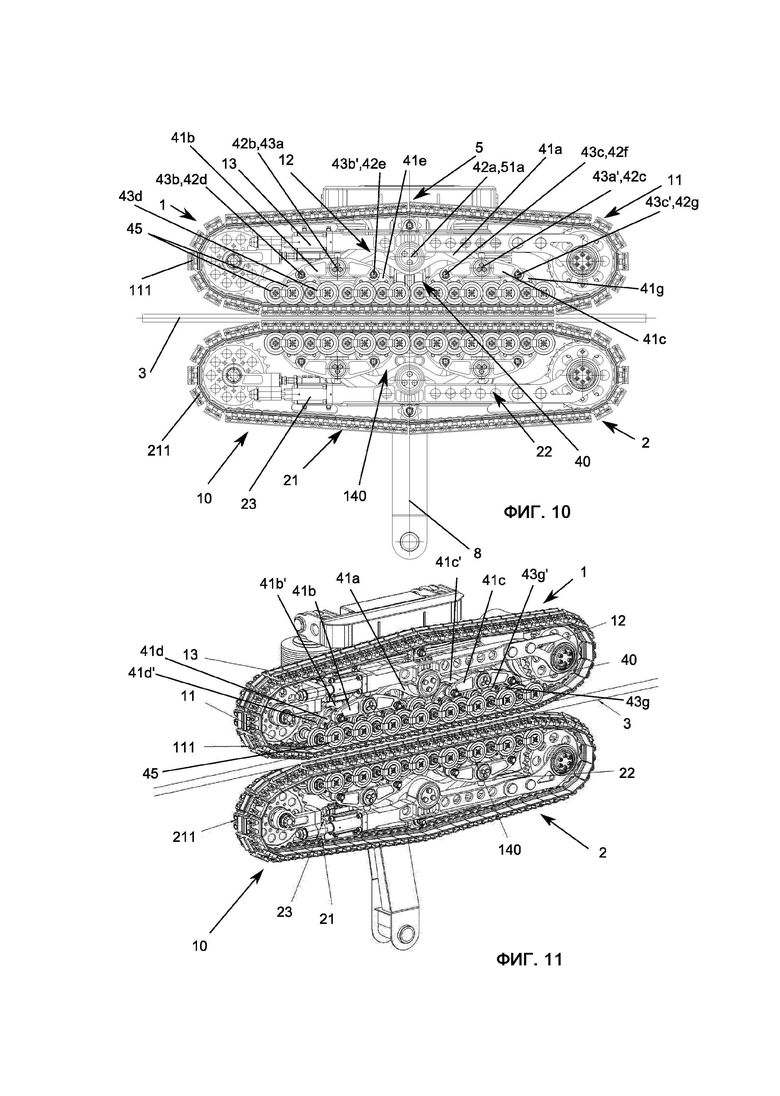
На следующих фиг. 10-12 представлен особо предпочтительный, но не ограничивающий, подлежащий пониманию пример осуществления предложенной в соответствии с изобретением тележки 10 подвесной канатной дороги со сбалансированным ходовым механизмом 40. Тележка 10 подвесной канатной дороги включает прижимной механизм 5, а также две равноценные расположенные в одной плоскости одна над другой гусеницы 1, 2. Гусеничные цепи 11, 21 гусениц 1, 2 образованы количеством установленных в ряд друг к другу траков 111, 211 гусеницы. Гусеничные цепи 11, 21 приводятся в движение с помощью не представленного привода 30 соответственно при помощи гусеничного движителя 12, 22. Гусеничные движители 12, 22 гусениц 1, 2 образованы в виде сбалансированного ходового механизма 40. Сбалансированный ходовой механизм 40 позволяет равномерное распределение усилий внутри соответствующего гусеничного движителя 12, 22.
В предложенной в соответствии с изобретением тележке 10 подвесной канатной дороги сбалансированный ходовой механизм 40 для равномерного распределения усилий в гусеничном движителе включает количество расположенных в форме каскада в количестве ступеней уравнительных коромысел 41а-41n. Уравнительные коромысла 41а-41n образованы аналогично коромысловым весам, причем каждое уравнительное коромысло 41а-41n имеет центральную точку 42а вращения и две расположенные соответственно на одинаковом расстоянии от центральной точки 42а-42n вращения концевые точки 43а-43n, 43a’-43n’ вращения. Концевые точки 43а-43n и 43a’-43n’вращения соответствующих уравнительных коромысел 41а-41n расположены на расстоянии вдоль высоты до соответствующих центральных точек 42а-42n вращения тех же самых уравнительных коромысел 41а-41n. Воображаемые соединительные линии концевых точек 43а-43n и 43a’-43n’ вращения c соответствующими точками 42а-42n вращения уравнительного коромысла 41а-41n образуют равнобедренный треугольник. Расстояние концевых точек 43а-43n и 43a’-43n’ вращения от центральных точек 42а-42n вращения вдоль высоты каждого уравнительного коромысла 41а-41n в отдельных ступенях может быть равно, но и изменяться от ступени к ступени. Центральная точка 42а вращения первого уравнительного коромысла 41а первой ступени располагается с возможностью поворота в прижимном механизме 5, например, на первом месте 51а для опоры или втором месте 51b для опоры. Соответственно в концевых точках 43а-43n, 43a’-43n’ вращения уравнительных коромысел 41а-41n каждой ступени с возможностью вращения расположена центральная точка 42а-42n вращения соседнего уравнительного коромысла 41b-41n следующей ступени. Таким образом уравнительные коромысла 41b, 41c второй ступени соответственно с их центральными точками 42b, 42c вращения располагаются в концевых точках 43а, 43a’ вращения уравнительного коромысла 41а первой ступени. В концевых точках 43b, 43b’ и 43c, 43c’вращения уравнительных коромысел 41b, 41c второй ступени соответственно расположены с возможностью вращения уравнительные коромысла 41d, 41e, 41f, 41g третьей ступени с их центральными точками 42d, 42e, 42f, 42g, вращения и т.д.
В концевых точках 43x-43n, и 43x’-43n’ вращения уравнительных коромысел 41x-41n последней ступени расположено некоторое число опорных катов 45, причем опорные катки 45 установлены с возможностью вращения вокруг концевых точек 43x-43n, и 43x’-43n’ вращения уравнительных коромысел 41х-41n последней ступени. Опорные катки 45 в этом случае прилегают к соответствующей гусеничной цепи 11, 21 к, по меньшей мере, траку 111, 211 гусеницы.
Фиг. 10 и 11 показывают особо предпочтительную форму осуществления тележки 10 подвесной канатной дроги с предпочтительным интегрированным в каждую гусеницу 1, 2 сбалансированным ходовым механизмом 40, 140. Сбалансированный ходовой механизм 40 включает количество имеющих форму каскада, расположенных в трех ступенях уравнительных коромысел 41а-41g. Уравнительные коромысла 41а-41n при этом образованы аналогично коромысловым весам. Каждое уравнительное коромысло 41а-41n включает расположенную в середине соответствующего уравнительного коромысла 41а-41n центральную точку 42а-42g вращения. Соответственно на одинаковом расстоянии от центральной точки 42а-42g вращения соответствующего уравнительного коромысла 41а-41g расположены две концевые точки 43а-43g вращения, соответственно 43a’-43g,’. Концевые точки 43а-43g вращения, соответственно 43a’-43g’, лежат соответственно ближе к концу соответствующего уравнительного коромысла 41а-41g. Уравнительное коромысло 41 с центральной точкой 42а вращения установлено с помощью вращательного шарнира с возможностью вращения в прижимном механизме 5, в данной форме осуществления в первом месте 51а для опоры. В первой концевой точке 43а вращения первого уравнительного коромысла 41а первой ступени расположено первое уравнительное коромысло 41b второй ступени, причем центральная точка 42b вращения первого уравнительного коромысла 41b второй ступени расположена с возможностью вращения, соответственно поворота, во вращательном шарнире в первой концевой точке 43а вращения первого уравнительного коромысла 41а первой ступени. Во второй концевой точке 43a’ вращения первого уравнительного коромысла 41а первой ступени расположено второе уравнительное коромысло 41с второй ступени, причем второе уравнительное коромысло 41с второй ступени с центральной точкой 42с вращения установлено с возможностью поворота, соответственно вращения, в концевой точке 43a’ вращения первого уравнительного коромысла 41а первой ступени. Четыре уравнительных коромысла 41d-41g третьей ступени соответственно с их центральными точками 42d-42g вращения расположены с возможностью поворота соответственно в концевой точке 43b, 43b’ вращения первого уравнительного коромысла 41b второй ступени, соответственно в концевой точке 43с, 43c’ вращения второго уравнительного коромысла 41с второй ступени. В концевых точках 43d-43g вращения, соответственно 43d’-43g’, уравнительных коромысел 41d-41g третьей ступени расположено соответственно количество опорных роликов 45, которые прилегают к гусеничной цепи 11 соответственно к, по меньшей мере, траку 111 гусеницы. Сбалансированный ходовой механизм 40 расположен симметрично вокруг средней оси приводного механизма 5. Концевые точки 43a-43g вращения, соответственно 43a’-43g’, соответствующих уравнительных коромысел 41a-41g расположены на расстоянии вдоль высоты соответствующего уравнительного коромысла 41a-41g к соответствующим центральным точкам 42a-42g вращения, соответственно имеют расстояние в направлении средней оси 8 прижимного механизма 5. Концевые точки 43a-43g вращения, соответственно 43a’-43g’, уравнительных коромысел 41a-41g, соответственно их соединительные линии расположены в равнобедренном треугольнике. Благодаря расстоянию в направлении высоты соответствующих концевых точек 43a-43a’ вращения к центральным точкам 42a-42g вращения обеспечивается расстояние опорных катков 45 по отношению к центральной точке 42а вращения первого уравнительного коромысла 41а первой ступени, соответственно задается расстояние первого места 51а для опоры к тракам 111 гусеницы, соответственно к несущему канату 3. Благодаря устройству уравнительных коромысел 41a-41g по принципу коромысловых весов достигается равномерное распределение веса, соответственно усилий, на все опорные катки 45. С помощью расположенных с возможностью вращения центральных точек 42a-42g вращения уравнительных коромысел 41a-41g возможно компенсирующее движение опорных катков 45, соответственно траков 111 гусеницы по несущему канату 3, благодаря чему могут без ударов компенсироваться выступы, соответственно уширения или изменения расстояния, между гусеницами 1, 2. В представленной на фиг. 10 форме осуществления гусеница 2 имеет точно также образованный аналогично первой гусенице 1 сбалансированный ходовой механизм 140 с тремя ступенями.
Фиг. 11 показывает другую предпочтительную форму осуществления тележки 10 подвесной канатной дороги со сбалансированными ходовыми механизмами 40, 140, которые интегрированы в первой гусенице 1. соответственно во второй гусенице 2. В этой форме осуществления сбалансированного ходового механизма 40, 140 соответствующие уравнительные коромысла 41a-41g второй и третьей ступени расположены симметрично вокруг средней оси уравнительного коромысла 41а первой ступени. Симметричное расположение уравнительных коромысел 41b-41b, соответственно 41b’-41g’, образовано зеркально вокруг средней оси уравнительного коромысла 41а. В соответствующих концевых точках 41d-41g’ вращения расположено соответственно четыре опорных катка 45.
В представленных на фиг. 10 и 11 формах осуществления тележки 10 подвесной канатной дороги соответственно расстояние концевых точек 43a-43g’ вращения уравнительных коромысел 41a-41g к центральным точкам 42a-42g вращения в каждой ступени может быть образовано различным. Уравнительные коромысла 41a-41n соответствующей ступени при этом особо предпочтительно образованы одинаково и имеют одинаковые расстояния концевых точек 43a-43g’ вращения до центральных точек 42a-42g вращения и одинаковые размеры отдельных уравнительных коромысел 41a-41g.
Фиг. 12 показывает форму осуществления предложенной в соответствии с изобретением тележки 10 подвесной канатной дороги со сбалансированным ходовым механизмом при наезде на седловую опору 200 для каната. Сбалансированный ходовой механизм 40, 140 позволяет особенно при наезде на седловую опору 200 для каната выравнивание распределение усилий по всем опорным каткам 45, соответственно 145, с чем уменьшаются, соответственно предотвращаются удары в гусеничном движителе 12, 22 и срок службы отдельных составных частей гусениц 1, 2 заметно повышается. Дальше благодаря применению сбалансированного ходового механизма 40 возможно без ударов переезжать через седловую опору 200 для каната.
На фиг. 13 и 14 представлена особо предпочтительная форма осуществления предложенной в соответствии с изобретением тележки 10 подвесной канатной дороги. Тележка 10 подвесной канатной дороги включает по одному предложенному в соответствии с изобретением сбалансированному ходовому механизму 40, 140, интегрированному соответственно в гусенице 1 и 2 и предложенный в соответствии с изобретением прижимной механизм 5. Прижимной механизм 5 включает два пружинных зажимных элемента 4а, 4b, которые соответственно концентрично расположены вокруг цилиндров 6а, 6b предварительного натяжения. Цилиндр 6а, соответственно 6b, соединяет первую часть 51 рамы со второй частью 52 рамы прижимного механизма 5 и таким образом определяет прижимное усилие гусениц 1, 2 друг к другу. Гусеницы 1, расположены с возможностью вращения в местах 51а для опоры, соответственно 51b, соответственно коренных цапфах 54а, 54b. Дальше прижимной механизм 5 тележки 10 подвесной канатной дороги включает два прижимных цилиндра 7а, 7b, которые с цилиндрами 6а, 6b предварительного натяжения, соответственно пружинными зажимными элементами 4а, 4b, задают прижимное усилие гусениц 1, 2 к несущему канату 3.
Фиг. 14 показывает в аксонометрическом виде предложенную в соответствии с изобретением тележку 10 подвесной канатной дороги согласно фиг. 13. Гусеничные движители 12, 22 гусениц 1, 2 приводятся в действие соответственно с помощью секционного привода 30а, 30b, причем соответственно секционный привод 30а, 30b гусеничных движителей 12, 22 приводит в движение зубчатое колесо, соответственно натяжной ролик соответствующего гусеничного движителя 12, 22. Секционные приводы 30а, 30b дальше включают тормозные механизмы 9а, 9b, которые могут тормозить соответствующий секционные привод 30а, 30b, соответственно в аварийной ситуации останавливать тележку 10 подвесной канатной дороги.
В качестве альтернативы тому, что представлено на фиг. 1, 2 и 10-14, гусеничный движитель 12, 22 первой гусеницы 1, соответственно второй гусеницы 2, может включать зажимный цилиндр 13, соответственно 23, который зажимает гусеничную цепь 11, соответственно гусеничную цепь 21, гусениц 1, 2. Зажимные цилиндры 13, 23 могут быть присоединены при этом точно также к одинаковой гидравлической системе с цилиндрами 6а, 6b предварительного натяжения, соответственно цилиндру 6 предварительного натяжения и/или прижимному цилиндру 7, соответственно прижимным цилиндрам 7а, 7b, и питаться пропорционально с мощностью привода возрастающим давлением питания.
На фиг. 15 и 16 представлена предложенная в соответствии с изобретением пассажирская гондола для транспорта пассажиров на несущем канате 3. Пассажирская гондола 100 включает две тележки 10а, 10b подвесной канатной дороги, которые одна за другой расположены на несущем канате 3. Пассажирская гондола 100 через подвеску 60 соединена с тележками 10а, 10b подвесной канатной дороги и соответственно через вращательный шарнир 61а, 61b соединена с первой частью соответствующей тележки 10а, 10b подвесной канатной дороги, благодаря чему становится возможным изменение положения пассажирской гондолы в направлении силы тяжести, так что пассажирская гондола 100 всегда ориентируется в направлении силы тяжести. Тележки 10а, 10b подвесной канатной дороги могут быть образованы при этом как представлено на фиг. 1-14.
Другой стороной настоящего изобретения является разработка соответствующей седловой опоры 200 для каната для переезда предложенной в соответствии с изобретением тележки 10 подвесной канатной дороги. Форма осуществления предложенной в соответствии с изобретением седловой опоры 200 для каната представлена на фиг. 17-19. Седловая опора 200 для каната дороги имеет подвеску 201, которая образована в виде L-образной консоли. Подвеска 201 имеет первую часть 201а и вторую часть 201b, причем первая часть 201а имеет большую длину, чем вторая часть 201b. На второй части 201b расположено два соединительных элемента 202а, 202b, которые служат для установки на мачте канатной дороги или на других опорных элементах. На первой части 201а подвески 201 расположена опора 203 для каната, которая установлена с возможностью поворота, соответственно вращения, в средине по отношению к подвеске 201. Опора 203 для каната имеет удлиненную поверхность прилегания 204 для каната, на которую может накладываться несущий канат 3. Поверхность 204 прилегания для каната при этом образована количеством пластинчатых пружин 205, которые расположены рядом друг с другом и могут упруго деформироваться по отношению друг к другу в направлении поверхности 204 прилегания для каната. Пластинчатые пружины 205 имеют одинаковую длину и расположены уступами рядом друг с другом на опоре 203 для каната.
Как показано на фиг. 19, пластинчатые пружины 205, соответственно поверхность 204 прилегания для каната, могут иметь ограждения 206 для каната, в которые укладывается канат, соответственно несущий канат 3. Ограждения 206 для каната могут лучше предотвращать изменение положения, соответственно соскальзывание, несущего каната 3. Поверхность 204 прилегания для каната с помощью слегка изогнутого расположения пластинчатых пружин 205 друг к другу образована в виде дуги (фиг. 17), причем угол α кривизны может согласовываться с характеристиками каната, соответственно видом несущего каната 3.
Дальше предусмотрено, что предложенная в соответствии с изобретением тележка 10 подвесной канатной дороги, соответственно две или несколько предложенных в соответствии с изобретением тележек 10 подвесной канатной дороги 10а, 10b интегрированы в кране канатной дороги для транспорта груза на несущем канате 3, причем кран канатной дороги подвешен к тележкам 10а, 10b подвесной канатной дороги.
Другой стороной изобретения является устройство для транспорта грузов или пассажиров по несущему канату 3, причем устройство включает седловую опору 200 для каната или несколько седловых опор 200 для каната, которые образованы соответственно предложенной согласно изобретению седловой опоре 200 для каната, как это описано в качестве примера на фиг. 15-17, и которые на соответствующей подвеске 201 при помощи соединительных элементов 202а, 202b закреплены на мачтах. Предложенное в соответствии с изобретением устройство включает дальше несущий канат 3, который лежит на поверхности 204 прилегания для каната седловой опоры 200 для каната, на котором пассажирская гондола 100 или кран канатной дороги включает предложенные в соответствии с изобретение тележки 10 подвесной канатной дороги, как описано в приведенных в качестве примера формах осуществления на фиг. 1-14. Несущий канат 3 при этом уложен между противолежащими гусеничными траками 111, 211 гусеничных цепей 11, 21, соответственно гусеничными цепями 11, 21, нескольких тележек 10а, 10b подвесной канатной дороги. Пассажирские гондолы 100, соответственно краны канатной дороги, могут двигаться по несущему канату 3 с помощью секционных приводов 30а, 30b, с чем находящиеся в пассажирских гондолах или кранах канатной дороги пассажиры или грузы могут транспортироваться по несущему канату 3.
В описанных формах осуществления привод 30, соответственно секционные приводы 30а, 30b, могут включать двигатели внутреннего сгорания, электродвигатели или гидравлические двигатели.
В качестве альтернативы пилотируемому, соответственно управляемому машинистом, движению тележки 10 подвесной канатной дороги, пассажирской гондолы или крана канатной дороги привод 30, гидравлическая система и/или блок управления могут управляться автоматически или при помощи управления по радио, с чем тележка 10 подвесной канатной дороги может передвигаться на несущем канате 3 с экипажем или без экипажа.
Дальше цилиндр 6 предварительного натяжения, соответственно цилиндры 6а, 6b предварительного натяжения, могут настраиваться при помощи программируемого блока управления. Для этого цилиндр 6 предварительного натяжения, соответственно цилиндры 6а, 6b предварительного натяжения могут быть присоединены или включать электрически клапаны, регулирующие давление, которые регулируют давление в цилиндре 6 предварительного натяжения, соответственно цилиндрах 6а, 6b предварительного натяжения и согласовывают с условиями движения тележки 10 подвесной канатной дороги. Преимущественно на каждой гусенице 1, 2 может быть предусмотрены электрические датчики, которые с помощью программного обеспечения сравнивают соответствующее проскальзывание между гусеницами 1, 2, соответственно тележками 10а, 10b подвесной канатной дороги, и оценивают с помощью фильтра программы. Эти дополнительные электрические и гидравлические компоненты позволяют срочно отдельно повышать прижимное давление тележки 10 подвесной канатной дороги 10, соответственно тележек 10а, 10b подвесной канатной дороги, при слишком высоком различии в проскальзывании обеих гусениц 1, 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| Канатная дорога | 1991 |
|
SU1796512A1 |
| Ходовая часть самоходного вагона подвесной канатной дороги | 1989 |
|
SU1752644A1 |
| СПОСОБ СТРОПОВКИ ЭКСКАВАТОРА ДЛЯ ТРАНСПОРТИРОВАНИЯ НА ВНЕШНЕЙ ПОДВЕСКЕ ВЕРТОЛЕТА | 2021 |
|
RU2768290C1 |
| ТРАНСПОРТНАЯ ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 1994 |
|
RU2146626C1 |
| РОЛИК ДЛЯ УСТАНОВОК ПОДВЕСНЫХ КАНАТНЫХ ДОРОГ | 2013 |
|
RU2592190C2 |
| Подвесная канатная дорога маятникового типа | 1977 |
|
SU737275A1 |
| СИСТЕМА ПОДВЕСНОЙ КАНАТНОЙ ДОРОГИ, СОДЕРЖАЩАЯ ПЕРЕДАЮЩУЮ КОНСТРУКЦИЮ МЕЖДУ ДВУМЯ КАНАТНЫМИ ПЕТЛЯМИ | 2020 |
|
RU2808647C2 |
| Сдвоенный канатный экскаватор | 1977 |
|
SU682608A1 |
| УСТРОЙСТВО ДЛЯ РЕМОНТА И ОБСЛУЖИВАНИЯ НАКЛОННЫХ ПОВЕРХНОСТЕЙ ЗДАНИЙ И СООРУЖЕНИЙ БОЛЬШИХ РАЗМЕРОВ | 2016 |
|
RU2641551C2 |
| Гусеничный движитель транспортного средства | 1982 |
|
SU1079528A1 |
Изобретение относится к тележке подвесной канатной дороги для транспортировки грузов или пассажиров, а также к крану канатной дороги, пассажирской гондоле, седловой опоре для каната, а также устройству для транспорта. Тележка (10) подвесной канатной дороги включает две противолежащие располагающиеся в одной плоскости, в частности, одна над другой гусеницы (1, 2), причем гусеницы (1, 2) расположены на расстоянии друг к другу. Гусеницы (1, 2) имеют соответственно гусеничную цепь (11, 21) и некоторое количество установленных в ряд друг с другом гусеничных траков (111, 211). Гусеничные траки (111, 211) образуют соответствующую гусеничную цепь (11, 21), причем между противолежащими гусеницами (1, 2) на располагающихся друг против друга гусеничных траках (111, 211) гусеничных цепей (11, 21) может находиться несущий канат (3). Тележка содержит прижимной механизм (5), который соединяет гусеницы (1, 2) друг с другом, причем расстояние между гусеницами (1, 2) может регулироваться прижимным механизмом (5). Прижимное усилие обеих гусениц (1, 2) друг к другу и/или прижимное усилие обеих гусениц (1, 2) к тяговому канату (3) может устанавливаться прижимным механизмом (5). Гусеничные цепи (11, 21) приводятся в движение по замкнутому контуру с помощью привода (30) через гусеничный движитель (12, 22), причем тележка (10) подвесной канатной дороги может передвигаться по несущему канату (3). В результате становится возможным автономное передвижение тележки по несущему канату. 5 н. и 25 з.п. ф-лы, 19 ил.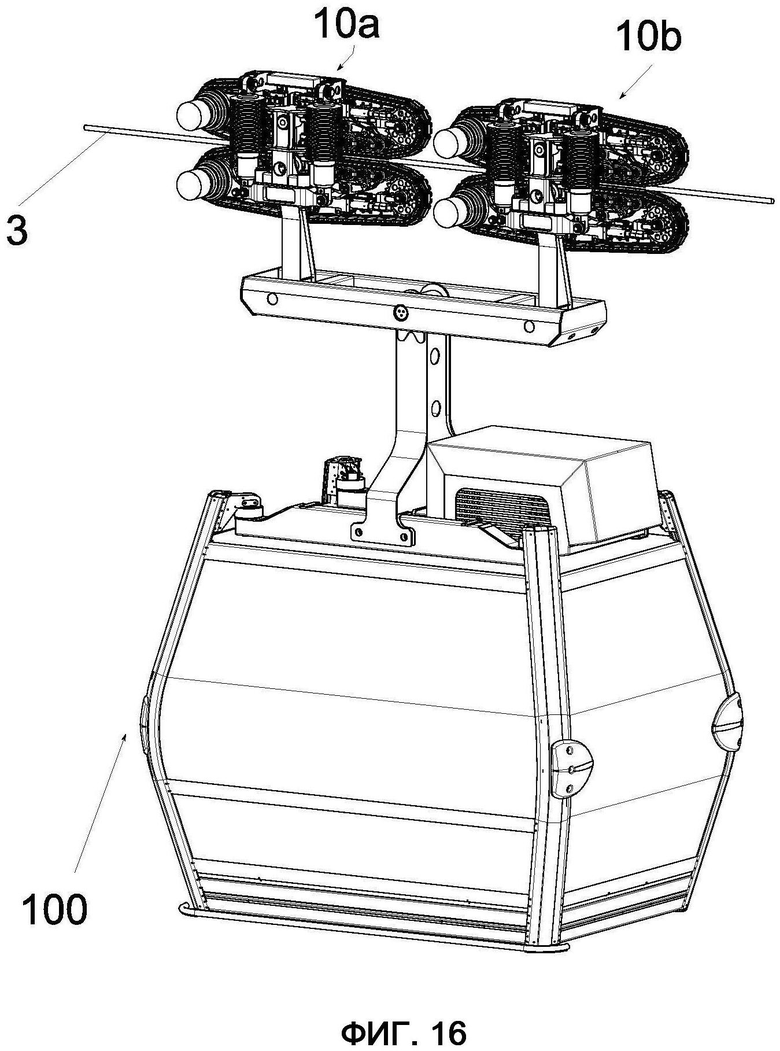
1. Тележка подвесной канатной дороги для транспортировки грузов или пассажиров, причем тележка (10) подвесной канатной дороги включает две располагающиеся противолежащие в одной плоскости, в частности, одна над другой гусеницы (1, 2), причем гусеницы (1, 2) расположены на расстоянии друг к другу, причем гусеницы (1, 2) имеют соответственно гусеничную цепь (11, 21) и установленные в ряд друг с другом траки (111, 211) гусеницы, причем траки (111, 211) гусениц образуют соответствующую гусеничную цепь (11, 21), причем между противолежащими гусеницами (1, 2) в располагающихся друг против друга траках (111, 211) гусениц гусеничных цепей (11, 21) размещен несущий канат (3), причем тележка содержит прижимной механизм (5), который соединяет гусеницы (1, 2) друг с другом, причем расстояние между гусеницами (1, 2) регулируется посредством прижимного механизма (5), причем прижимное усилие обеих гусениц (1, 2) друг к другу и/или прижимное усилие обеих гусениц (1, 2) к несущему канату (3) устанавливается прижимным механизмом (5), причем гусеничные цепи (11, 21) выполнены с возможностью приведения в движение по замкнутому контуру с помощью привода (30) через гусеничный движитель (12, 22), причем тележка (10) подвесной канатной дороги выполнена с возможностью передвижения по несущему канату (3), отличающаяся тем, что прижимной механизм (5) включает, по меньшей мере, пружинный зажимный элемент (4), который предварительно зажимает обе гусеницы (1, 2) в направлении друг к другу, в частности, при помощи первой части (51) рамы и второй части (52) рамы, при этом прижимной механизм (5) включает, по меньшей мере, цилиндр (6) предварительного натяжения, который противодействует силовому воздействию пружинного зажимного элемента (4).
2. Тележка по п. 1, отличающаяся тем, что прижимной механизм (5) имеет первую часть (51) рамы и вторую часть (52) рамы, причем первая часть (51) рамы и/или вторая часть (52) рамы выполнены с возможностью передвижения вдоль средней оси (8), причем первая гусеница (1), в частности, в первом месте (51а) для опоры на первой части (51) рамы и вторая гусеница (2), в частности, во втором месте (51b) для опоры на второй рамной части (52) расположены, в частности, с возможностью поворота друг к другу.
3. Тележка по п. 1 или 2, отличающаяся тем, что прижимной механизм (5) включает, по меньшей мере, прижимной цилиндр (7), посредством которого гусеницы (1, 2) с заданным давлением прижимаются друг к другу, причем прижимной цилиндр (7) предпочтительно расположен между первой частью (51) рамы и второй частью (52) рамы, соединяя их.
4. Тележка по п. 3, отличающаяся тем, что прижимной цилиндр (7) и цилиндр (6) предварительного натяжения соответственно соединены с гидравлической системой, в частности с той гидравлической системой с одинаковым давлением питания в общей гидравлической системе, причем прижимной цилиндр (7) и цилиндр (6) предварительного натяжения образованы и расположены таким образом, что силовое воздействие прижимного цилиндра (7) и силовое воздействие цилиндра (6) предварительного натяжения, в частности, до 90 бар давления питания действуют на прижимной механизм (5) с равной величиной и противоположно по направлению и компенсируют друг друга.
5. Тележка по любому из пп. 1-4, отличающаяся тем, что давление в цилиндре (6) предварительного натяжения регулируется пропорционально мощности привода (30), предпочтительно с помощью регулятора давления, причем при начале движения тележки (10) подвесной канатной дороги по несущему канату (3) в цилиндре (6) предварительного натяжения приложено давление привода, при этом силовое воздействие цилиндра (6) предварительного натяжения при наличии давления привода, в частности, 90 бар компенсирует силовое воздействие пружинного зажимного элемента (4).
6. Тележка по любому из пп. 1-5, отличающаяся тем, что силовое воздействие цилиндра (6) предварительного натяжения ограничено, в частности, с помощью механического упора или максимального хода цилиндра (6) предварительного натяжения, причем повышение силового воздействия цилиндра (6) предварительного натяжения при наличии давления привода блокируется.
7. Тележка по любому из пп. 1-6, отличающаяся тем, что тележка (10) подвесной канатной дороги имеет два пружинных зажимных элемента (4а, 4b), два цилиндра (6а, 6b) предварительного натяжения и два прижимных цилиндра (7а, 7b), которые, в частности, интегрированы в прижимном механизме (5), причем предпочтительно пружинные зажимные элементы (4а, 4b), цилиндры (6а, 6b) предварительного натяжения и прижимные цилиндры (7а, 7b) расположены в тележке (10) подвесной канатной дороги соответственно симметрично вокруг средней оси (8), в частности, на продольной стороне гусениц (1, 2).
8. Тележка по любому из пп. 1-7, отличающаяся тем, что каждая гусеница (1, 2) включает, по меньшей мере, натяжной цилиндр (13, 23), который натягивает соответствующую гусеничную цепь (11, 21) и расположен, в частности, параллельно к противолежащим друг к другу тракам (111, 211) гусениц гусеничных цепей (11, 21).
9. Тележка по любому из пп. 1-8, отличающаяся тем, что цилиндр (6) предварительного натяжения, прижимной цилиндр (7) и/или натяжные цилиндры (13, 23) являются работающими на масле гидравлическими цилиндрами и соответственно присоединены к гидравлической системе, в частности к той гидравлической системе с одинаковым давлением питания в общей гидравлической системе.
10. Тележка по любому из пп. 1-9, отличающаяся тем, что пружинный зажимный элемент (4) включает тарельчатые пружины, которые расположены концентрично вокруг цилиндра (6) предварительного натяжения.
11. Тележка по любому из пп. 1-10, отличающаяся тем, что давление питания цилиндра (6) предварительного натяжения, прижимного цилиндра (7) и/или натяжного цилиндра (7) отрегулировано пропорционально мощности привода (30), причем, в частности, давление и расход в гидравлической системе задаются с помощью привода (30) и привод (30) питает гидравлическую систему.
12. Тележка по любому из пп. 1-11, отличающаяся тем, что привод (30) гусениц (1, 2) включает двигатели внутреннего сгорания или электродвигатели.
13. Тележка по любому из пп. 1-12, отличающаяся тем, что каждая гусеница (1, 2), соответственно, гусеничные цепи (11, 21) приведены в движение соответственно напрямую через гидравлические двигатели, причем гидравлические двигатели выполнены предпочтительно одинаковыми и одинаково запитаны через гидравлическую систему.
14. Тележка по любому из пп. 1-13, отличающаяся тем, что траки (111, 211) гусениц захватывают, по меньшей мере, часть поперечного сечения несущего каната (3), причем, в частности, траки (111) первой гусеницы (1) захватывают больше половины поперечного сечения несущего каната (3).
15. Тележка по любому из пп. 1-14, отличающаяся тем, что привод (30) управляется с помощью радиоуправления.
16. Тележка по любому из пп. 1-15, отличающаяся тем, что цилиндр (6) предварительного натяжения, прижимной цилиндр (7) и/или натяжные цилиндры (13, 23) соединены с программируемым блоком управления, причем давление в цилиндре (6) предварительного натяжения, и/или прижимном цилиндре (7), и/или зажимных цилиндрах (13, 23) изменяется предпочтительно с помощью регулирующих давление клапанов, которые присоединены к цилиндру (6) предварительного натяжения, и/или прижимному цилиндру (7), и/или натяжным цилиндрами (13, 23), причем при определенном с помощью блока управления проскальзывании одной или обеих гусениц (1, 2) или между гусеницами (1, 2) давление в цилиндре (6) предварительного натяжения, и/или прижимном цилиндре (7), и/или в зажимных цилиндрах (13, 23), и/или прижимное давление, приложенное с помощью прижимного механизма (5), изменяется.
17. Тележка по любому из пп. 1-16, отличающаяся тем, что привод (30) имеет тормозной механизм (9), посредством которого осуществляется торможение привода (30), причем тормозной механизм (9) включает предпочтительно тарельчатые пружины.
18. Тележка по любому из пп. 1-17, отличающаяся тем, что каждая гусеница (1, 2) включает соответственно привод (30а, 30b), причем соответствующий привод (30а, 30b) приводит в движение соответствующий гусеничный движитель (12, 22) и предпочтительно имеет соответственно тормозной механизм (9а, 9b).
19. Тележка по любому из пп. 1-18, отличающаяся тем, что на тележке (10) подвесной канатной дороги расположена гондола для транспорта пассажиров и/или грузов, причем гондола шарнирно присоединена к соединительному рычагу (59), который соединен предпочтительно с первой частью (51) рамы прижимного механизма (5).
20. Тележка по любому из пп. 1-19, отличающаяся тем, что, по меньшей мере, гусеничный движитель (12, 22) включает сбалансированный ходовой механизм (40) для равномерного распределения усилий в гусеничном движителе (12, 22), причем сбалансированный ходовой механизм (40) имеет заданное количество расположенных в форме каскада ступеней уравнительных коромысел (41а-41n), которые образованы аналогично коромысловым весам, причем каждое уравнительное коромысло (41а-41n) имеет центральную точку (42а -42n) вращения и две расположенные соответственно на одинаковом расстоянии от центральной точки (42а-42n) вращения, в частности, вблизи конца каждого уравнительного коромысла (41а-41n) концевые точки (43а-43n, 43а’- 43n’) вращения, причем центральная точка (42а) вращения уравнительного коромысла (41а) первой ступени расположена в прижимном механизме (5) с возможностью поворота, в частности, вокруг первого места (51а) для опоры или второго места (51b) для опоры, причем соответственно в концевых точках (43а-43n, 43a’-43n’) вращения уравнительных коромысел (41а-41n) каждой ступени с возможностью вращения расположена центральная точка (42а-42n) вращения соседнего уравнительного коромысла (41b-41n) следующей ступени, причем уравнительные коромысла (41b. 41c) второй ступени соответственно с их центральными точками (42b, 42c) вращения расположены в концевых точках (43а, 43а’) вращения уравнительного коромысла (41а) первой ступени, и в концевых точках (43b, 43b’ и 43c, 43c’) вращения уравнительных коромысел (41b, 41c) второй ступени соответственно расположены с возможностью поворота уравнительные коромысла (41d, 41e, 41f, 41g) третьей ступени с их центральными точками (42d, 42e, 42f, 42g) вращения и т.д., причем в концевых точках (43x-43n и 43x’-43n’) вращения уравнительных коромысел (41x-41n) последней ступени расположено количество опорных катков (45а-45n), причем опорные катки (45a-45n) установлены с возможностью вращения вокруг концевых точек (43x-43n, и 43x’-43n’) вращения уравнительных коромысел (41x-41n) последней ступени и причем опорные катки (45a-45n) могут располагаться на соответствующей гусеничной цепи (11, 21) на, по меньшей мере, траке (111, 211) гусеницы.
21. Тележка по п. 20, отличающаяся тем, что концевые точки (43а-43n и 43a’-43n’) вращения соответствующих уравнительных коромысел (41a-41n) имеют расстояние по высоте до соответствующих центральных точек (42a-42n) вращения тех же самых уравнительных коромысел (41а-41n), причем соединительные линии концевых точек (43a-43n и 43a’-43n’) вращения с соответствующими центральными точками (42a-42n) вращения уравнительного коромысла (41a-41n) образуют равнобедренный треугольник, причем, в частности, расстояние концевых точек (43a-43n и 43a’-43n’) вращения от центральных точек (42a-42n) вращения вдоль высоты каждого уравнительного коромысла (41a-41n) в отдельных ступенях одинаково.
22. Тележка по п. 20 или 21, отличающаяся тем, что сбалансированный ходовой механизм (40) имеет три расположенных ступенями уравнительных коромысла (41a-41g), причем соответственно концевые точки (43a-43g и 43a’-43g’) вращения соответствующих уравнительных коромысел (41a-41g) имеют расстояние вдоль высоты до соответствующих центральных точек (42a-42g) вращения, причем соединительные линии концевых точек (43a-43g и 43a’-43g’) вращения с соответствующими центральными точками (42a-42g) вращения уравнительного коромысла (41a-41g) образуют равнобедренный треугольник.
23. Тележка по любому из пп. 20-22, отличающаяся тем, что в каждой конечной точке (43a-43n и 43a’-43n’) вращения каждой ступени с возможностью поворота расположены соответственно два уравнительных коромысла (41a-41n, 41a-41n’), причем соответствующие два уравнительных коромысла (41a-41n, 41a-41n’) расположены симметрично на стороне уравнительного коромысла (41a-41n, 41a-41n’) предыдущей ступени.
24. Кран канатной дороги для транспортировки груза на несущем канате (3), отличающийся тем, что он включает, по меньшей мере, одну, в частности две, тележки (10) подвесной канатной дороги по любому из пп. 1-23, причем кран канатной дороги подвешен, в частности, к двум тележкам (10a, 10b) подвесной канатной дороги.
25. Пассажирская гондола для транспортировки пассажиров на несущем канате (3), отличающаяся тем, что она включает, по меньшей мере, одну, в частности две, тележки (10) подвесной канатной дороги по любому из пп. 1-23, причем пассажирская гондола подвешена, в частности, к двум тележкам (10a, 10b) подвесной канатной дороги.
26. Седловая опора (200) для каната, которая переезжается тележкой (10) подвесной канатной дороги по любому из пп. 1-23, причем седловая опора (200) для каната включает подвеску (201) и, по меньшей мере, расположенный на подвеске (201) соединительный элемент (202) для крепления на мачте, отличающаяся тем, что на подвеске (201) расположена опора (203) для несущего каната (3), причем опора (3) для каната имеет удлиненную поверхность (204) прилегания для каната, на которую укладывается несущий канат (3), причем поверхность (204) прилегания для каната имеет заданное количество упругих, пружинящих частичных участков и причем частичные участки выполнены с возможностью упругого прогиба предпочтительно по нормали к поверхности (204) прилегания для каната.
27. Седловая опора по п. 26, отличающаяся тем, что опора (203) для каната включает заданное количество пластинчатых пружин (205), которые расположены рядом друг с другом, причем пластинчатые пружины (205) образуют поверхность (204) прилегания для каната с возможностью упругой деформации по отношению друг к другу.
28. Седловая опора по п. 26 или 27, отличающаяся тем, что подвеска (201) образована в виде L-образной консоли с первой частью (201а) и второй частью (201b), первая часть (201а) имеет большую длину, чем вторая часть (201b), причем соединительный элемент (202) расположен на второй части (201b) и опора (203) для каната установлена с возможностью вращения на первой части (201b).
29. Седловая опора по любому из пп. 26-28, отличающаяся тем, что поверхность (204) прилегания для каната образует изогнутую поверхность.
30. Устройство для транспортировки грузов или пассажиров по несущему канату (3), включающее седловую опору (200) для каната по любому из пп. 26-29, причем седловая опора (200) для каната дороги закреплена, в частности, на подвеске (201) на мачте, причем устройство включает опирающийся на поверхность (204) прилегания для каната седловой опоры (200) для каната несущий канат (3), причем на несущем канате (3) закреплена пассажирская гондола по п. 25 или закреплен кран канатной дороги по п. 24 и/или, по меньшей мере, тележка (10) подвесной канатной дороги по любому из пп. 1-23, которая таким образом расположена на несущем канате (3), что несущий канат (3) располагается между противолежащими траками (111, 211) гусеницы гусеничных цепей (11, 21).
| CN 201176352 Y, 07.01.2009 | |||
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| СПОСОБ КАНАТНОЙ ТРЕЛЕВКИ ДРЕВЕСИНЫ | 2011 |
|
RU2492630C2 |
| US 2953101 A, 20.09.1960 | |||
| US 4957047 A, 18.09.1990 | |||
| DE 20213353 U1, 28.11.2002. | |||

