ОБЛАСТЬ ТЕХНИКИ
[0001]
Настоящее изобретение относится к способам помощи при парковке и устройствам помощи при парковке.
УРОВЕНЬ ТЕХНИКИ
[0002]
Известны изобретения для операции помощи при парковке находящегося в транспортном средстве человека (Патентная литература 1). В изобретении, раскрытом в патентной литературе 1, во время движения транспортного средства осуществляется поиск свободного места для парковки. В случае, когда обнаруживается свободное место для парковки, на дисплее отображается изображение, указывающее свободное место для парковки.
СПИСОК ЦИТАТ
ПАТЕНТНАЯ ЛИТЕРАТУРА
[0003]
Патентная литература 1: Публикация заявки на патент Японии № 2008–96362
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ПРОБЛЕМА
[0004]
К сожалению, в случае, когда изображение, указывающее свободное место для парковки, отображается во время движения транспортного средства, как в изобретении, раскрытом в патентной литературе 1, изображение может не отображаться в подходящем положении из–за задержки обработки или других факторов.
[0005]
Настоящее изобретение было выполнено в виду вышеупомянутой проблемы, и его цель состоит в том, чтобы обеспечит способ помощи при парковке и устройство помощи при парковке, способные отображать изображение, указывающее свободное место для парковки, в соответствующем положении.
РЕШЕНИЕ ПРОБЛЕМЫ
[0006]
Способ помощи при парковке согласно аспекту настоящего изобретения включает в себя: определение, остановилось ли рассматриваемое транспортное средство; и в случае, когда определено, что рассматриваемое транспортное средство остановилось, отображение изображения в положении свободного места для парковки на изображении окрестностей, которое является видом области, включающей в себя рассматриваемое транспортное средство сверху, при этом изображение указывает свободное место для парковки.
ПРЕИМУЩЕСТВЕННЫЕ ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
[0007]
Настоящее изобретение позволяет отображать изображение, указывающее свободное место для парковки, в соответствующем положении.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008]
[Фиг. 1] Фиг. 1 – общая схема конфигурации устройства помощи при парковке согласно варианту осуществления настоящего изобретения.
[Фиг. 2] Фиг. 2 – схема конфигурации части устройства помощи при парковке в соответствии с вариантом осуществления настоящего изобретения.
[Фиг. Фиг.3А – схема для пояснения примера работы устройства помощи при парковке в соответствии с вариантом осуществления настоящего изобретения.
[Фиг. 3B] Фиг. 3B – схема для пояснения другого примера работы устройства помощи при парковке в соответствии с вариантом осуществления настоящего изобретения.
[Фиг. 4A] Фиг. 4A – блок–схема последовательности операций для объяснения примера работы устройства помощи при парковке в соответствии с вариантом осуществления настоящего изобретения.
[Фиг. 4B] Фиг. 4B – блок–схема последовательности операций для объяснения примера работы устройства помощи при парковке в соответствии с вариантом осуществления настоящего изобретения.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0009]
Далее будет описан вариант осуществления настоящего изобретения со ссылкой на чертежи. Одинаковые компоненты на чертежах обозначены одинаковыми ссылочными позициями, и их описание опущено. Устройство помощи при парковке в соответствии с настоящим вариантом осуществления применяется к транспортному средству, в котором его режим управления может переключаться между автоматическим управлением и ручным управлением. Следует отметить, что автоматизированное управление в настоящем варианте осуществления означает, например, состояние, в котором по меньшей мере один из исполнительных механизмов, включающих в себя тормоза, акселератор и рулевое управление, управляется без действия находящегося в транспортном средстве человека. Это означает, что находящиеся в транспортном средстве люди могут управлять другими исполнительными механизмами. Автоматическое управление также означает состояние, в котором выполняется по меньшей мере один вид управления, такой как управление ускорением–замедлением или управление поперечным положением. Ручное управление в настоящем варианте осуществления означает, например, состояние, когда находящийся в транспортном средстве человек управляет тормозами, акселератором и рулевым управлением. Следует отметить, что вариант осуществления настоящего изобретения может быть применен как для автоматического управления, так и для ручного управления. Кроме того, вариант осуществления настоящего изобретения может применяться к любому случаю движения по площадке для парковки, имеющей места для парковки, в том числе при обнаружении свободного места для парковки, когда обнаружено свободное место для парковки, при парковке на (перемещении на) свободном месте для парковки, при движении рядом со свободным местом для парковки и при движении по площадке для парковки, хотя свободного места для парковки нет.
[0010]
(Конфигурация устройства помощи при парковке)
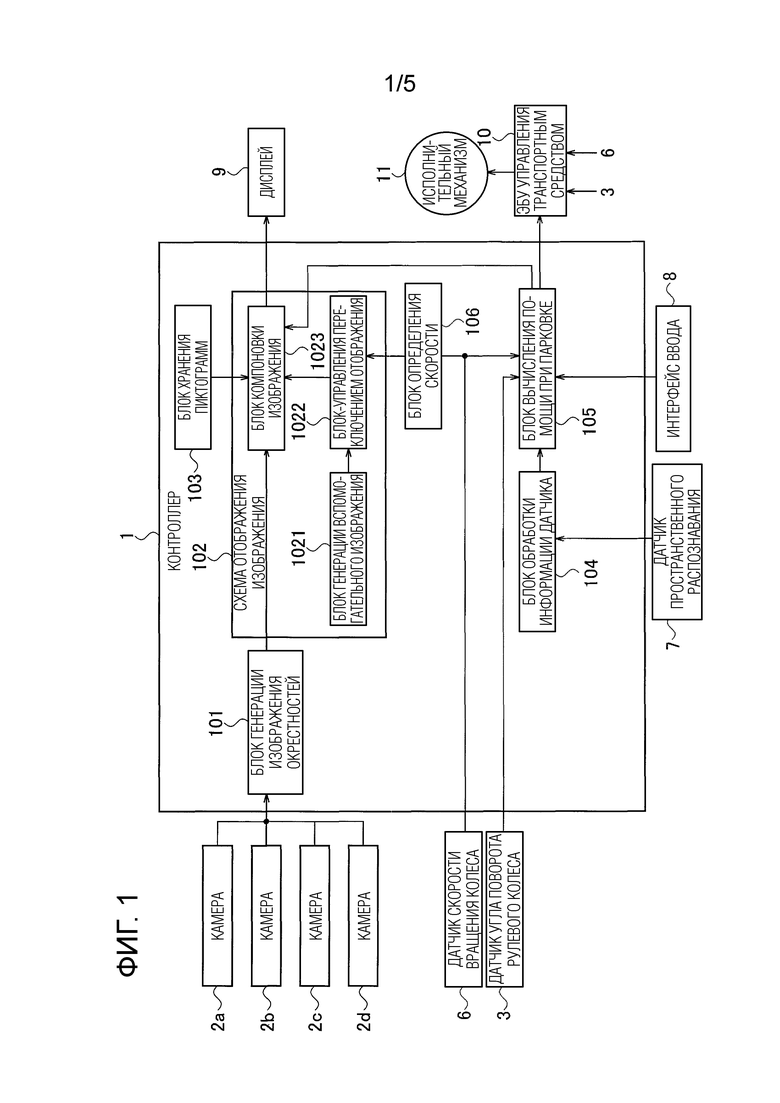
Конфигурация устройства помощи при парковке согласно настоящему варианту осуществления будет описана со ссылкой на фиг. 1. Устройство помощи при парковке включает в себя контроллер 1, камеры 2a–2d, датчик 3 угла поворота рулевого колеса, датчик 6 скорости вращения колеса, датчик 7 пространственного распознавания, интерфейс 8 ввода, дисплей 9, ЭБУ (ECU) 10 управления транспортным средством и исполнительный механизм 11.
[0011]
Каждая из камер 2a–2d имеет устройство захвата изображения, такое как устройство с зарядовой связью (CCD) или комплементарная структура металл-оксид-полупроводник (CMOS), и захватывает изображения вокруг рассматриваемого транспортного средства. Камера 2а установлена в передней части рассматриваемого транспортного средства для захвата изображений впереди рассматриваемого транспортного средства. Камера 2b установлена в задней части рассматриваемого транспортного средства для захвата изображений позади рассматриваемого транспортного средства. Камера 2с установлена на левой стороне рассматриваемого транспортного средства для захвата изображений с левой стороны рассматриваемого транспортного средства. Камера 2d установлена на правой стороне рассматриваемого транспортного средства для захвата изображений с правой стороны рассматриваемого транспортного средства. Камеры 2a–2d выводят захваченные изображения в контроллер 1. Следует отметить, что камеры 2a–2d захватывают изображения окрестностей рассматриваемого транспортного средства и не захватывают само рассматриваемое транспортное средство. Следовательно, когда описанный ниже блок 1023 компоновки изображения отображает изображение вида вниз, блок 1023 компоновки изображения использует пиктограмму (изображение, имитирующее рассматриваемое транспортное средство), сохраненную в блоке 103 хранения пиктограмм.
[0012]
Датчик 3 угла поворота рулевого колеса определяет угол поворота рулевого колеса рассматриваемого транспортного средства и выводит обнаруженный угол поворота рулевого колеса в контроллер 1. Датчик 6 скорости вращения колеса детектирует скорость рассматриваемого транспортного средства и выводит детектированную скорость в блок 106 определения скорости.
[0013]
Датчик 7 пространственного распознавания представляет собой датчик для обнаружения объектов около рассматриваемого транспортного средства, который представляет собой, например, лазерный дальномер. Лазерный дальномер проецирует инфракрасное лазерное излучение на целевой объект и измеряет расстояние до целевого объекта, используя интенсивность отраженного света. Лазерный дальномер получает измеренное расстояние в виде информации облака точек и выводит информацию облака точек в блок 104 обработки информации датчика. Под объектами около транспортного средства подразумеваются движущиеся объекты, включая другие транспортные средства, мотоциклы, велосипеды и пешеходов, и стационарные объекты, включая припаркованные транспортные средства. Следует отметить, что датчик 7 пространственного распознавания не ограничен лазерным дальномером. Датчику 7 пространственного распознавания необходимо только определять расстояние до целевого объекта и присутствие целевого объекта, и, следовательно, датчик 7 пространственного распознавания может представлять собой, например, сонар зазора, использующий ультразвуковой сигнал, монокулярную камеру или стереокамеру, имеющую пару камер.
[0014]
Интерфейс 8 ввода представляет собой устройство, которое принимает входные данные от находящегося в транспортном средстве человека принимающего транспортного средства. Интерфейс 8 ввода представляет собой, например, сенсорную панель, обеспеченную на дисплее 9. Обратите внимание, что интерфейс 8 ввода может быть джойстиком или операционным переключателем или может быть устройством голосового ввода.
[0015]
Контроллер 1 представляет собой схему, которая обрабатывает данные, полученные от различных датчиков, и представляет собой, например, микрокомпьютер общего назначения, включающий в себя центральный процессор (CPU), память и блок ввода–вывода. Компьютерная программа, которая заставляет микрокомпьютер функционировать как контроллер 1, устанавливается и выполняется микрокомпьютером. Это обеспечивает работу микрокомпьютера в качестве контроллера 1. Следует отметить, что хотя здесь приведено описание примера, в котором контроллер 1 реализован с помощью программного обеспечения, выделенное аппаратное обеспечение для выполнения информационных процессов, описанных ниже, как само собой разумеющееся, может использоваться для конфигурации контроллера 1. Контроллер 1 включает в себя множество схем обработки информации, которые представляют собой блок 101 генерации изображения окрестностей, блок 102 генерации составного изображения, блок 103 хранения пиктограмм, блок 104 обработки информации датчика, блок 105 вычисления помощи при парковке и блок 106 определения скорости. Блок 102 генерации составного изображения включает в себя блок 1021 генерации вспомогательного изображения, блок 1022 управления переключением отображения и блок 1023 компоновки изображения.
[0016]
Блок 101 генерации изображения окрестностей (схема генерации изображения окрестностей) генерирует изображение вида вниз (изображение окрестностей), которое является видом рассматриваемого транспортного средства сверху, используя изображения, снятые четырьмя камерами 2a–2d. Следует отметить, что изображение окрестностей может иметь любой вид, из которого можно видеть взаимное расположение рассматриваемого транспортного средства и мест для парковки, например, изображение вида вниз и изображение с высоты птичьего полета. Кроме того, поскольку способ генерации изображения вида вниз или изображения вида птицы является известной технологией, его подробное описание опущено.
[0017]
Блок 104 обработки информации датчика (схема обработки информации датчика) оценивает траекторию движения, по которой должно двигаться рассматриваемое транспортное средство, используя информацию, полученную от датчика 7 пространственного распознавания. Блок 104 обработки информации датчика оценивает парковочную зону (место для парковки) в окрестностях предполагаемой траектории движения. Блок 104 обработки информации датчика обнаруживает свободные места для парковки около рассматриваемого транспортного средства. Блок 104 обработки информации датчика оценивает диапазон, в котором транспортное средство может перемещаться, на основе оцененного пути движения и мест для парковки. Блок 104 обработки информации датчика может обнаруживать места для парковки, используя белые линии на земле.
[0018]
Блок 106 определения скорости (схема определения остановки) определяет скорость рассматриваемого транспортного средства, используя скорость, полученную от датчика 6 скорости вращения колеса. Блок 106 определения скорости выводит результат определения в блок 1022 управления переключением отображения.
[0019]
Блок 1021 генерации вспомогательного изображения генерирует вспомогательные изображения для помощи при парковке. Обратите внимание, что вспомогательные изображения могут быть заранее сохранены в блоке 103 хранения пиктограмм. В случае, когда вспомогательные изображения хранятся в блоке 103 хранения пиктограмм, блок 1021 генерации вспомогательного изображения может считывать вспомогательные изображения из блока 103 хранения пиктограмм. Блок 1021 генерации вспомогательного изображения выводит сгенерированные вспомогательные изображения в блок 1022 управления переключением отображения.
[0020]
Блок 1022 управления переключением отображения определяет, выводить ли вспомогательные изображения, полученные из блока 1021 генерации вспомогательного изображения, в блок 1023 компоновки изображения, в зависимости от результата определения блока 106 определения скорости. Например, в случае, когда скорость рассматриваемого транспортного средства составляет 0 км/ч, блок 1022 управления переключением отображения выводит вспомогательное изображение в блок 1023 компоновки изображения. Подробности будут описаны позже.
[0021]
Блок 1023 компоновки изображения (схема отображения изображения) накладывает пиктограмму (изображение, имитирующее рассматриваемое транспортное средство), полученную из блока 103 хранения пиктограмм, на изображение окрестностей, сгенерированное блоком 101 генерации изображения окрестностей, для создания составного изображения. В случае, когда блок 1023 компоновки изображения получает вспомогательное изображение из блока 1022 управления переключением отображения, блок 1023 компоновки изображения накладывает вспомогательное изображение на изображение окрестностей. Блок 1023 компоновки изображения выводит составное изображение на дисплей 9.
[0022]
Блок 105 вычисления помощи при парковке вычисляет управляющий сигнал для рассматриваемого транспортного средства на основе информации, введенной в интерфейс 8 ввода, данных, полученных блоком 104 обработки информации датчика, угла поворота рулевого колеса, обнаруженного датчиком 3 угла поворота рулевого колеса, и скорости транспортного средства, детектированной датчиком 6 скорости вращения колеса. Блок 105 вычисления помощи при парковке выводит вычисленный управляющий сигнал в ЭБУ 10 управления транспортным средством.
[0023]
ЭБУ 10 управления транспортным средством автоматически управляет движением исполнительного механизма 11 при вождении, торможении и управлении рассматриваемым транспортным средством на основании управляющего сигнала и тому подобного, полученного из блока 105 вычисления помощи при парковке.
[0024]
Дисплей 9 представляет собой устройство для отображения различных видов информации для находящегося в транспортном средстве человека, которое представляет собой, например, дисплей для навигации, предусмотренный в пассажирском салоне.
[0025]
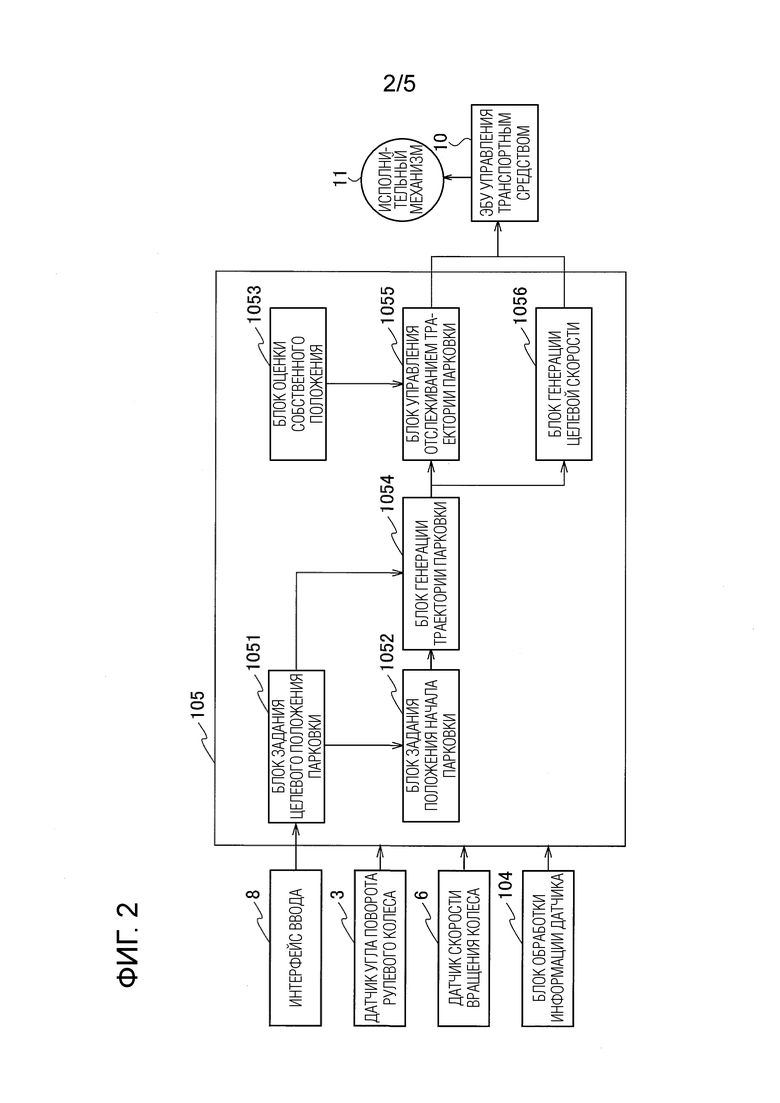
Далее блок 105 вычисления помощи при парковке будет подробно описан со ссылкой на фиг. 2. Как проиллюстрировано на фиг. 2, блок 105 вычисления помощи при парковке включает в себя блок 1051 задания целевого положения парковки, блок 1052 задания положения начала парковки, блок 1053 оценки собственного положения, блок 1054 генерации траектории парковки, блок 1055 управления отслеживанием траектории парковки и блок 1056 генерации целевой скорости.
[0026]
Блок 1051 задания целевого положения парковки задает целевое положение парковки на положение парковки, которое находящийся в транспортном средстве человек вводит в интерфейс 8 ввода. Блок 1051 задания целевого положения парковки выводит заданное целевое положение парковки в блок 1052 задания положения начала парковки и блок 1054 генерации траектории парковки.
[0027]
Блок 1052 задания положения начала парковки определяет способ парковки, подходящий для парковки в целевом положении парковки, и задает положение начала парковки, подходящее для определенного способа парковки. Примеры способа парковки включают в себя параллельную парковку и перпендикулярную парковку, а также парковку задним ходом и парковку передним ходом. Блок 1052 задания положения начала парковки выводит заданное положение начала парковки в блок 1054 генерации траектории парковки.
[0028]
Блок 1053 оценки собственного положения оценивает текущее положение рассматриваемого транспортного средства на основе данных обнаружения и т.п. датчика 6 скорости вращения колеса и датчика 3 угла поворота рулевого колеса. Для транспортного средства с рулевым управлением передними колесами, движущегося с низкой скоростью, обычно используется метод точного расчета траектории, при котором положение и ориентация рассматриваемого транспортного средства оцениваются на основе отношения между расстоянием перемещения центра оси заднего колеса и угла поворота переднего колеса. Метод точного расчета траектории полезен в случае рассмотрения движения на ограниченном участке, таком как, операция парковки. В качестве другого примера, блок 1053 оценки собственного положения также может оценивать собственное положение на основе взаимного расположения рассматриваемого транспортного средства относительно данных обнаружения, обнаруженных датчиком 7 пространственного распознавания, взаимного расположения рассматриваемого транспортного средства относительно белых линий на земле, захваченных камерами 2a–2d, и результатов распознавания объектов или тому подобного. Альтернативно, блок 1053 оценки собственного положения может оценивать абсолютное положение рассматриваемого транспортного средства, иными словами, положение рассматриваемого транспортного средства относительно заданной опорной точки, используя датчик определения положения. Датчик определения положения представляет собой устройство, установленное на рассматриваемом транспортном средстве, для измерения абсолютного положения рассматриваемого транспортного средства с использованием глобальной системы позиционирования (GPS), одометрии или тому подобного. Блок 1053 оценки собственного положения выводит оцененное собственное положение в блок 1055 управления отслеживанием траектории парковки.
[0029]
Блок 1054 генерации траектории парковки генерирует траекторию парковки из положения начала парковки, заданного блоком 1052 задания положения начала парковки, в целевое положение парковки. Блок 1054 генерации траектории парковки генерирует траекторию парковки, например, так, что количество перемещений вперед и назад и величина рулевого управления сводятся к минимуму, так что находящийся в транспортном средстве человек не испытывает дискомфорта. Блок 1054 генерации траектории парковки выводит сгенерированную траекторию парковки в блок 1055 управления отслеживанием траектории парковки и блок 1056 генерации целевой скорости.
[0030]
Блок 1055 управления отслеживанием траектории парковки генерирует управляющий сигнал для выполнения автоматического управления парковкой по траектории парковки на основе траектории парковки, сгенерированной блоком 1054 генерации траектории парковки, и собственного положения, оцененного блоком оценки собственного положения 1053. Например, блок 1055 управления отслеживанием траектории парковки генерирует управляющий сигнал, связанный с углом поворота рулевого колеса и положением переключения передачи. Блок 1055 управления отслеживанием траектории парковки выводит сгенерированный управляющий сигнал в ЭБУ 10 управления транспортным средством.
[0031]
Блок 1056 генерации целевой скорости генерирует управляющий сигнал для выполнения автоматического управления парковкой по траектории парковки, сгенерированной блоком 1054 генерации траектории парковки. Например, блок 1056 генерации целевой скорости генерирует сигнал управления, связанный со скоростью (величиной ускорения и величиной торможения). Блок 1056 генерации целевой скорости выводит сгенерированный управляющий сигнал в ЭБУ 10 управления транспортным средством.
[0032]
ЭБУ 10 управления транспортным средством управляет исполнительным механизмом 11 на основе сигналов управления, генерируемых блоком 1055 управления отслеживанием траектории парковки и блоком 1056 генерации целевой скорости для достижения автоматического управления парковкой.
[0033]
(Пример работы устройства помощи при парковке)
Далее будет описан пример работы устройства помощи при парковке со ссылкой на изображения 20 окрестностей, показанные на фиг. 3А и 3В.
[0034]
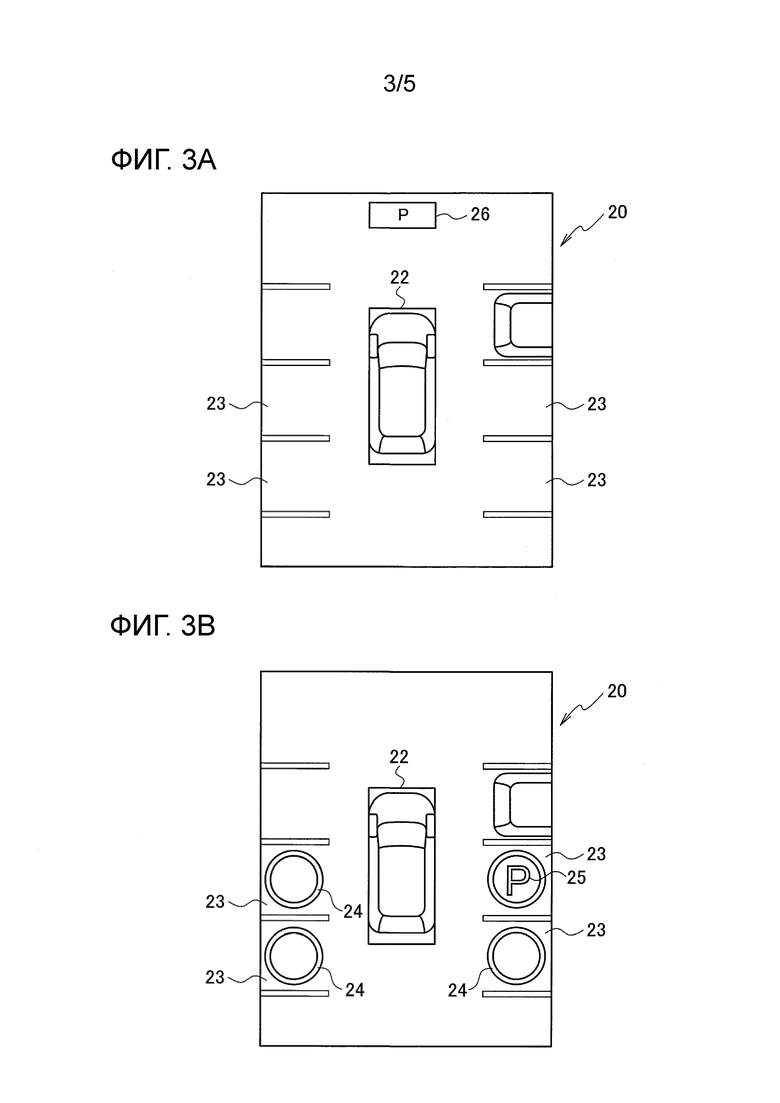
Сцена, проиллюстрированная на фиг. 3А, является сценой, в которой рассматриваемое транспортное средство 22 движется по площадке для парковки, обнаруживая свободное место для парковки. В сцене, показанной на фиг. 3А, предполагается, что скорость рассматриваемого транспортного средства 22 составляет более 0 км/ч. Сцена, показанная на фиг. 3B, также является сценой обнаружения свободного места для парковки, и в сцене, показанной на фиг. 3B, предполагается, что скорость рассматриваемого транспортного средства 22 составляет 0 км/ч.
[0035]
В случае, когда блок 104 обработки информации датчика обнаруживает свободные места 23 для парковки в результате обнаружения свободных мест для парковки около рассматриваемого транспортного средства 22, как показано на фиг. 3А, блок 106 определения скорости определяет, движется ли рассматриваемое транспортное средство 22. В частности, в случае, когда блок 106 определения скорости определяет, составляет ли скорость рассматриваемого транспортного средства 22 более 0 км/ч, и определяет, что скорость рассматриваемого транспортного средства 22 более 0 км/ч, блок 106 определения скорости определяет, что рассматриваемое транспортное средство 22 движется.
[0036]
В случае, когда блок 106 определения скорости определяет, что рассматриваемое транспортное средство 22 движется, блок 1023 компоновки изображения накладывает вспомогательное изображение 26 (второе вспомогательное изображение) на изображение 20 окрестностей, как показано на фиг. 3А. Затем блок 1023 компоновки изображения отображает на дисплее 9 составное изображение с наложенным вспомогательным изображением 26. Вспомогательное изображение 26 является изображением, указывающим, что около рассматриваемого транспортного средства 22 обнаружено свободное место 23 для парковки. Вспомогательное изображение 26 не является изображением, показывающим само свободное место 23 для парковки. Следовательно, вспомогательное изображение 26 накладывается в фиксированном положении, отличном от положения свободного места 23 для парковки. Например, в настоящем варианте осуществления вспомогательное изображение 26 накладывается вверху в центре изображения 20 окрестностей.
[0037]
Поскольку вспомогательное изображение 26 отображается в положении, отличном от свободного места 23 для парковки, как описано выше, в то время как рассматриваемое транспортное средство 22 движется, находящийся в транспортном средстве человек может легко понять, увидев вспомогательное изображение 26, что есть свободные места 23 для парковки. Это позволяет находящемуся в транспортном средстве человеку предпринимать действия для парковки на свободном месте 23 для парковки.
[0038]
Далее со ссылкой на фиг. 3B будет дано описание для случая, когда скорость рассматриваемого транспортного средства 22 составляет 0 км/ч. В случае, когда блок 104 обработки информации датчика обнаруживает свободные места 23 для парковки около рассматриваемого транспортного средства 22, как показано на фиг. 3В, блок 106 определения скорости определяет, находится ли рассматриваемое транспортное средство 22 в неподвижном состоянии. В частности, блок 106 определения скорости определяет, составляет ли скорость рассматриваемого транспортного средства 22 0 км/ч. Если скорость рассматриваемого транспортного средства 22 составляет 0 км/ч, блок 106 определения скорости определяет, что рассматриваемое транспортное средство 22 находится в неподвижном состоянии.
[0039]
В случае, когда блок 106 определения скорости определяет, что рассматриваемое транспортное средство 22 находится в неподвижном состоянии, как показано на фиг. 3B, блок 1023 компоновки изображения накладывает вспомогательное изображение 24 или вспомогательное изображение 25 (первое вспомогательное изображение) на каждое свободное место 23 для парковки. Вспомогательное изображение 24 и вспомогательное изображение 25 являются изображениями, указывающими, что место для парковки свободно. Следует отметить, что вспомогательное изображение 25 показывает, что место для парковки свободно и что это место является рекомендуемым местом для парковки. Рекомендуемое место для парковки означает, например, место, в котором легко парковаться. Рекомендованное место для парковки может быть местом, которое требует более короткого времени для парковки, или может быть местом, траектория парковки в которое короткая. Кроме того, рекомендуемое место для парковки также может быть местом, траектория парковки в которое не включает резких поворотов, местом, в которое возможна парковка задним ходом, или местом, из которого легко выехать. Вспомогательное изображение 24 указывает только на то, что место для парковки свободно.
[0040]
Поскольку вспомогательное изображение 24 или вспомогательное изображение 25 отображается в соответствующем положении на свободном месте 23 для парковки, как описано выше, в то время как рассматриваемое транспортное средство 22 находится в неподвижном состоянии, находящийся в транспортном средстве человек может легко понять, что свободные места 23 для парковки свободны. Это позволяет находящемуся в транспортном средстве человеку предпринимать действия для парковки на желаемом свободном месте для парковки. Кроме того, например, в случае, когда доступно автоматическое управление парковкой, как в настоящем варианте осуществления, касание находящегося в транспортном средстве человека вспомогательного изображения 25 (рекомендуемое место для парковки) автоматически инициирует управление парковкой в целевом положении парковки.
[0041]
Следует отметить, что, как показано на фиг. 3B, в случае, когда рассматриваемое транспортное средство 22 находится в неподвижном состоянии, блок 1023 компоновки изображения не накладывает вспомогательное изображение 26, показанное на фиг. 3A. Это связано с тем, что, когда рассматриваемое транспортное средство 22 находится в неподвижном состоянии, блок 1023 компоновки изображения накладывает вспомогательные изображения 24 и вспомогательное изображение 25 на свободные места 23 для парковки, так что находящийся в транспортном средстве человек может легко понять, что есть свободные места 23 для парковки, без наложенного вспомогательного изображения 26. Следует отметить, что было указано, что, когда рассматриваемое транспортное средство 22 находится в неподвижном состоянии, блок 1023 компоновки изображения не накладывает вспомогательное изображение 26, но настоящее изобретение не ограничивается этим примером. Например, блок 1023 компоновки изображения может наложить вспомогательное изображение 26, например, с его более тусклым цветом (путем регулировки его прозрачности) или с измененным цветом (например, с синего на серый).
[0042]
Между тем, как показано на фиг. 3А, когда рассматриваемое транспортное средство 22 движется, блок 1023 компоновки изображения не накладывает вспомогательное изображение 24 или вспомогательное изображение 25, показанные на фиг. 3В, на изображение 20 окрестностей. Другими словами, когда рассматриваемое транспортное средство 22 движется, блок 1023 компоновки изображения запрещает наложение вспомогательного изображения 24 или вспомогательного изображения 25. Причина будет объяснена ниже.
[0043]
Прежде всего, будет дано описание порядка, в котором блок 1023 компоновки изображения накладывает вспомогательное изображение 24 или вспомогательное изображение 25 на свободное место 23 для парковки. Сначала блок 1023 компоновки изображения распознает свободные места 23 для парковки на изображении 20 окрестностей. Затем блок 1023 компоновки изображения накладывает вспомогательные изображения 24 и вспомогательное изображение 25 на распознанные свободные места 23 для парковки. Если рассматриваемое транспортное средство 22 движется, когда блок 1023 компоновки изображения выполняет такие процессы, свободные места 23 для парковки на изображении 20 окрестностей, которые распознал блок 1023 компоновки изображения, также перемещаются. В частности, блок 1023 компоновки изображения распознает свободные места 23 для парковки, и в следующий момент, когда блок 1023 компоновки изображения собирается наложить вспомогательные изображения 24 и вспомогательное изображение 25 на распознанные свободные места 23 для парковки, свободные места 23 для парковки уже сдвинулись с позиций, когда их распознали. Как указано выше, временная задержка возникает между временем, когда блок 1023 компоновки изображения распознает свободные места 23 для парковки, и временем, когда блок 1023 компоновки изображения накладывает вспомогательные изображения 24 и вспомогательное изображение 25 на распознанные свободные места 23 для парковки. Эта временная задержка может вызвать позиционное отклонение между позициями свободных мест 23 для парковки и позициями вспомогательных изображений 24 и вспомогательного изображения 25. В частности, в случае, когда блок 1023 компоновки изображения накладывает вспомогательные изображения 24 и вспомогательное изображение 25 на свободные места 23 для парковки на изображении 20 окрестностей, когда рассматриваемое транспортное средство 22 движется, возможно, что вспомогательные изображения 24 и вспомогательное изображение 25 не могут быть наложены на соответствующие положения. Следует отметить, что такое позиционное отклонение становится больше при увеличении скорости рассматриваемого транспортного средства 22.
[0044]
В свете вышесказанного, в настоящем варианте осуществления, когда рассматриваемое транспортное средство 22 движется, блок 1023 компоновки изображения не отображает вспомогательное изображение 24 или вспомогательное изображение 25 на свободных местах 23 для парковки. Это предотвращает позиционное отклонение между положениями свободных мест 23 для парковки и положениями вспомогательных изображений 24 и вспомогательного изображения 25. Таким образом, устройство помощи при парковке предотвращает предоставление недостоверной информации находящемуся в транспортном средстве человеку. Следует отметить, что когда рассматриваемое транспортное средство 22 движется, блок 1023 компоновки изображения накладывает вспомогательное изображение 26 в положение, отличное от свободных мест 23 для парковки, вместо отображения вспомогательных изображений 24 и вспомогательного изображения 25 на свободных местах 23 для парковки, как проиллюстрировано на фиг. 3А. Это позволяет находящемуся в транспортном средстве человеку понять, что есть свободные места 23 для парковки, увидев вспомогательное изображение 26. Поскольку вспомогательное изображение 26 отображается в положении, отличном от свободных мест 23 для парковки, блоку 1023 компоновки изображения не нужно принимать во внимание вышеупомянутую задержку по времени.
[0045]
Когда рассматриваемое транспортное средство 22 находится в неподвижном состоянии, блок 1023 компоновки изображения отображает вспомогательные изображения 24 и вспомогательное изображение 25 на свободных местах 23 для парковки, как показано на фиг. 3B. Поскольку рассматриваемое транспортное средство 22 находится в неподвижном состоянии, вышеупомянутая задержка по времени не возникает, и, таким образом, не происходит позиционного отклонения между положениями мест 23 для парковки и положениями вспомогательных изображений 24 и вспомогательного изображения 25. Поскольку блок 1023 компоновки изображения отображает вспомогательные изображения 24 и вспомогательное изображение 25 на свободном месте 23 для парковки, когда рассматриваемое транспортное средство 22 находится в неподвижном состоянии, блок 1023 компоновки изображения может отображать вспомогательные изображения 24 и вспомогательное изображение 25 в соответствующих положениях.
[0046]
После того как блок 1023 компоновки изображения отображает вспомогательные изображения 24 и вспомогательное изображение 25 в положениях свободных мест 23 для парковки, блок 1023 компоновки изображения продолжает отображать вспомогательные изображения 24 и вспомогательное изображение 25 до тех пор, пока скорость рассматриваемого транспортного средства 22 не становится выше или равной заданной скорости. Таким образом, находящийся в транспортном средстве человек может выбрать желаемое свободное место для парковки, пока скорость рассматриваемого транспортного средства 22 не станет выше или равна заданной скорости.
[0047]
Причина, по которой блок 1023 компоновки изображения продолжает отображать вспомогательные изображения 24 и вспомогательное изображение 25 до тех пор, пока скорость рассматриваемого транспортного средства 22 не станет выше или равной заданной скорости, заключается в том, что позиционное отклонение между положениями свободных мест 23 для парковки и положениями вспомогательных изображений 24 и вспомогательного изображения 25 подавляется до тех пор, пока скорость рассматриваемого транспортного средства 22 не станет выше или равной заданной скорости. Другими словами, до тех пор, пока скорость рассматриваемого транспортного средства 22 не станет выше или равной заданной скорости, блок 1023 компоновки изображения может точно отслеживать свободные места 23 для парковки.
[0048]
Блок 1023 компоновки изображения может отслеживать данные положения, указывающие свободные места 23 для парковки в качестве данных временного ряда. Данные положения, указывающие свободные места 23 для парковки, сохраняются на карте. Когда рассматриваемое транспортное средство 22 находится в неподвижном состоянии, блок 1023 компоновки изображения может получить данные положения, точно указывающие свободные места 23 для парковки, по сравнению со временем, когда рассматриваемое транспортное средство 22 движется. Таким образом, блок 1023 компоновки изображения может точно отображать вспомогательные изображения 24 и вспомогательное изображение 25, имеющие взаимное расположение относительно положений, указывающих свободные места 23 для парковки, на свободных местах 23 для парковки. После этого, когда рассматриваемое транспортное средство 22 начинает перемещаться из своего неподвижного состояния, блок 1023 компоновки изображения может точно отслеживать свободные места 23 для парковки, перемещая рассматриваемое транспортное средство 22 на карте в соответствии с перемещением рассматриваемого транспортного средства 22. Таким образом, блок 1023 компоновки изображения может точно отображать вспомогательные изображения 24 и вспомогательное изображение 25 на свободных местах 23 для парковки. Однако в случае, когда накапливаются ошибки, такие как ошибки измерения датчика 6 скорости вращения колеса, ошибки оценки собственного положения одометрии и ошибки при обнаружении свободных мест 23 для парковки, может возникнуть указанное выше позиционное отклонение. Следовательно, когда скорость рассматриваемого транспортного средства 22 выше или равна заданной скорости, блок 1023 компоновки изображения не отображает вспомогательное изображение 24 или вспомогательное изображение 25. Таким образом, блок 1023 компоновки изображения предотвращает предоставление недостоверной информации находящемуся в транспортном средстве человеку. Следует отметить, что вышеупомянутые картографические данные могут быть заранее сохранены в устройстве помощи при парковке или могут быть получены от внешнего сервера картографических данных посредством облачных вычислений. Альтернативно, блок 1023 компоновки изображения может получать картографические данные посредством связи между транспортными средствами или связи между транспортным средством и дорожной инфраструктурой. Обратите внимание, что хотя заданная скорость не ограничена какой–либо конкретной скоростью, она может составлять, например, от 3 км/ч до 5 км/ч.
[0049]
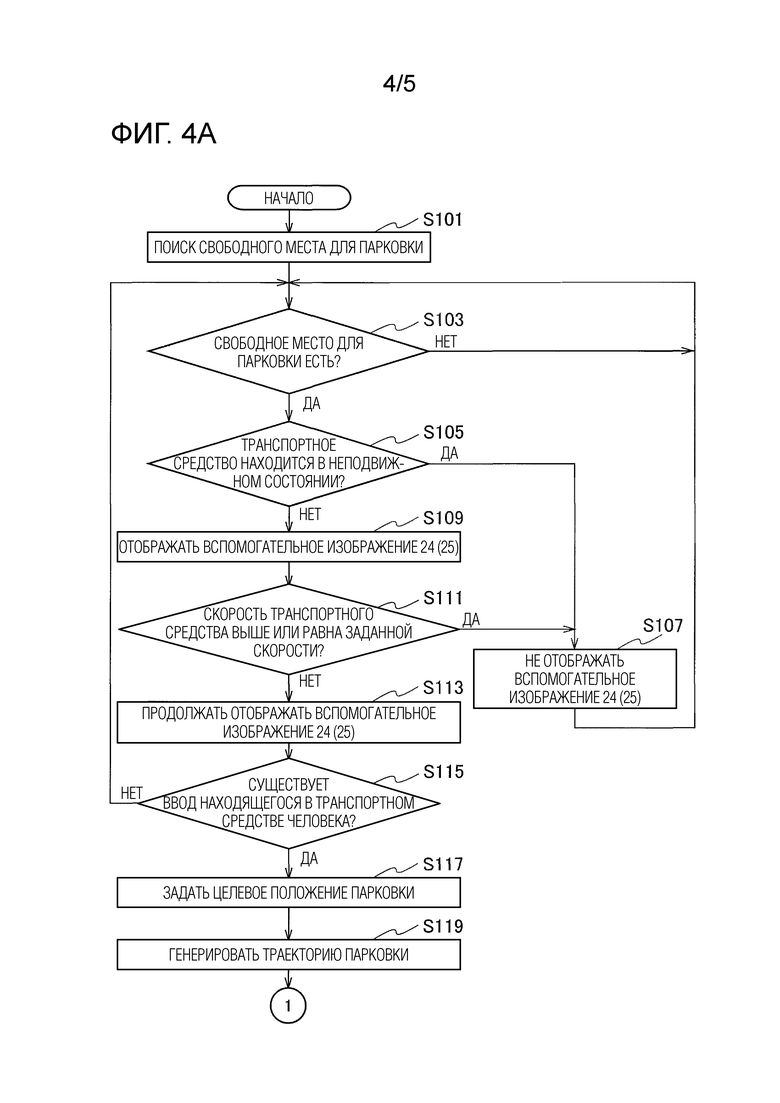
Далее будет описан пример работы со ссылкой на блок–схему последовательности операций на фиг. 4.
[0050]
На этапе S101 блок 104 обработки информации датчика обнаруживает свободные места для парковки на основе информации, полученной от датчика 7 пространственного распознавания. Процесс переходит на этап S103, на котором, если блок 104 обработки информации датчика обнаруживает свободное место для парковки около рассматриваемого транспортного средства 22 (Да на этапе S103), процесс переходит на этап S105. На этапе S103, если блок 104 обработки информации датчика не обнаруживает свободное место для парковки около рассматриваемого транспортного средства 22 (Нет на этапе S103), процесс продолжает ожидание.
[0051]
На этапе S105 блок 106 определения скорости определяет, составляет ли скорость рассматриваемого транспортного средства 22 0 км/ч, чтобы определить, находится ли рассматриваемое транспортное средство 22 в неподвижном состоянии. Если блок 106 определения скорости определяет, что рассматриваемое транспортное средство 22 не находится в неподвижном состоянии (Нет на этапе S105), процесс переходит на этап S107, и, соответственно, блок 1023 компоновки изображения не накладывает вспомогательное изображение 24 или вспомогательное изображение 25 на свободное место 23 для парковки. Причина заключается в том, что между положением свободного места 23 для парковки и положением вспомогательного изображения 24 или вспомогательного изображения 25 может возникать позиционное отклонение в случае, когда блок 1023 компоновки изображения отображает вспомогательное изображение 24 или вспомогательное изображение 25 на свободном месте 23 для парковки, когда рассматриваемое транспортное средство 22 движется.
[0052]
С другой стороны, если блок 106 определения скорости определяет, что рассматриваемое транспортное средство 22 находится в неподвижном состоянии (Да на этапе S105), процесс переходит на этап S109, где блок 1023 компоновки изображения отображает вспомогательное изображение 24 или вспомогательное изображение 25 на свободном месте 23 для парковки, как показано на фиг. 3B. Поскольку рассматриваемое транспортное средство 22 находится в неподвижном состоянии, временная задержка не возникает, и, таким образом, не происходит позиционного отклонения между положением места 23 для парковки и положением вспомогательного изображения 24 или вспомогательного изображения 25. Это позволяет блоку 1023 компоновки изображения накладывать вспомогательное изображение 24 или вспомогательное изображение 25 в соответствующей позиции.
[0053]
Процесс переходит на этап S111, где блок 106 определения скорости определяет, является ли скорость рассматриваемого транспортного средства 22 выше или равна заданной скорости. Если скорость рассматриваемого транспортного средства 22 ниже заданной скорости (Нет на этапе S111), процесс переходит на этап S113, на котором блок 1023 компоновки изображения продолжает отображать вспомогательное изображение 24 или вспомогательное изображение 25. Это связано с тем, что блок 1023 компоновки изображения может точно отслеживать свободное место 23 для парковки до тех пор, пока скорость рассматриваемого транспортного средства 22 не станет выше или равной заданной скорости, что подавляет позиционное отклонение между положениями места 23 для парковки и положением вспомогательного изображения 24 или вспомогательного изображения 25. С другой стороны, если скорость рассматриваемого транспортного средства 22 выше или равна заданной скорости (Да на этапе S111), процесс переходит на этап S107, где блок 1023 компоновки изображения не отображает вспомогательное изображение 24 или вспомогательное изображение 25 на свободном месте для парковки. Это связано с тем, что, когда скорость рассматриваемого транспортного средства 22 выше или равна заданной скорости, накапливаются ошибки, такие как ошибки измерения датчика 6 скорости вращения колеса, ошибки оценки собственного положения одометрии, ошибки в обнаружении свободного места 23 для парковки, так что позиционное отклонение может возникать между положением места 23 для парковки и положением вспомогательного изображения 24 или вспомогательного изображения 25.
[0054]
Процесс переходит на этап S115, где, если находящийся в транспортном средстве человек выбирает желаемое свободное место для парковки через интерфейс 8 ввода (Да на этапе S115), процесс переходит на этап S117. С другой стороны, если входные данные от находящегося в транспортном средстве человека отсутствуют, процесс возвращается к этапу S103.
[0055]
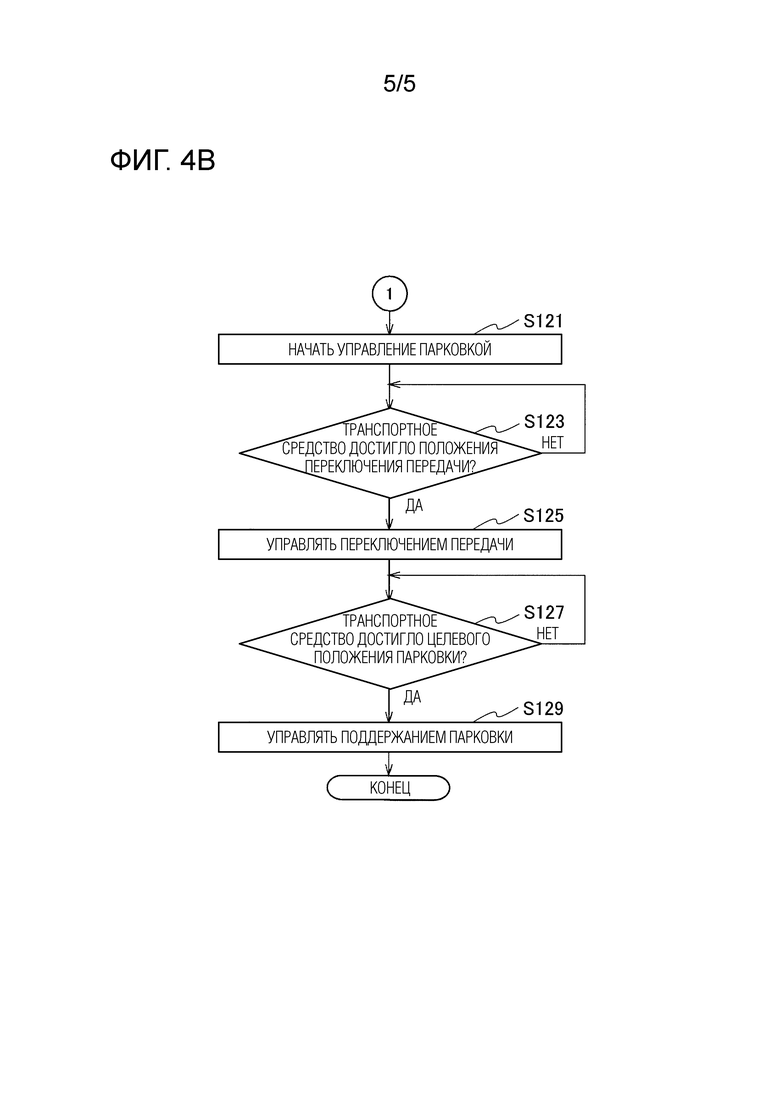
На этапе S117 блок 1051 задания целевого положения парковки задает целевое положение парковки на свободное место для парковки, выбранное находящимся в транспортном средстве человеком. Блок 1052 задания положения начала парковки определяет способ парковки и задает положение начала парковки, подходящее для определенного способа парковки. Обратите внимание, что в этой блок–схеме последовательности операций описание сделано при условии, что способ парковки является парковкой задним ходом. После этого процесс переходит на этап S119, где блок 1054 генерации траектории парковки генерирует траекторию парковки из положения начала парковки, заданного на этапе S117, в целевое положение парковки. Затем процесс переходит на этап S121, где ЭБУ 10 управления транспортным средством начинает автоматическое управление парковкой.
[0056]
Затем процесс переходит на этап S123, где блок 1053 оценки собственного положения определяет, достигло ли рассматриваемое транспортное средство 22 положения, в котором должно переключаться положение переключения передачи. Если рассматриваемое транспортное средство 22 достигло положения, в котором должно переключаться положение переключения передачи (Да на этапе S123), процесс переходит на этап S125, где ЭБУ 10 управления транспортным средством выполняет управление переключением передачи. После этого ЭБУ 10 управления транспортным средством продолжает автоматическое управление парковкой, и процесс переходит на этап S127. С другой стороны, если рассматриваемое транспортное средство 22 не достигло положения, в котором должно переключаться положение переключения передачи (Нет на этапе S123), процесс продолжает ожидание. На этапе S127 блок 1053 оценки собственного положения определяет, достигло ли рассматриваемое транспортное средство 22 целевого положения парковки. Если рассматриваемое транспортное средство 22 достигло целевого положения парковки (Да на этапе S127), процесс переходит на этап S129, где ЭБУ 10 управления транспортным средством выполняет управление, такое как изменение положения переключения передачи в положение парковки, и затем автоматическое управление парковкой заканчивается.
[0057]
(Эксплуатационное преимущество)
Как было описано выше, устройство помощи при парковке в соответствии с настоящим вариантом осуществления обеспечивает следующие эксплуатационные преимущества.
[0058]
Когда блок 104 обработки информации датчика обнаружил свободное место 23 для парковки около рассматриваемого транспортного средства 22, блок 106 определения скорости определяет, находится ли рассматриваемое транспортное средство 22 в неподвижном состоянии. Если блок 106 определения скорости определяет, что рассматриваемое транспортное средство 22 находится в неподвижном состоянии, блок 1023 компоновки изображения отображает вспомогательное изображение 24 или вспомогательное изображение 25, указывающие, что место для парковки свободно, в положении свободного места 23 для парковки на изображении окрестностей 20, как показано на фиг. 3B. Затем блок 1023 компоновки изображения отображает составное изображение на дисплее 9. Когда рассматриваемое транспортное средство 22 находится в неподвижном состоянии, задержка по времени не возникает, и, таким образом, не происходит никакого позиционного отклонения между положением места 23 для парковки и положением вспомогательного изображения 24 или вспомогательного изображения 25. Таким образом, устройство помощи при парковке может отображать вспомогательное изображение 24 или вспомогательное изображение 25 в соответствующем положении.
[0059]
В случае, когда скорость рассматриваемого транспортного средства 22 составляет 0 км/ч, блок 106 определения скорости определяет, что рассматриваемое транспортное средство 22 находится в неподвижном состоянии. Таким образом, это определение позволяет блоку 106 определения скорости быстро определять, что рассматриваемое транспортное средство 22 находится в неподвижном состоянии.
[0060]
После того как блок 1023 компоновки изображения отображает вспомогательное изображение 24 или вспомогательное изображение 25, блок 1023 компоновки изображения продолжает отображать вспомогательное изображение 24 или вспомогательное изображение 25 до тех пор, пока скорость рассматриваемого транспортного средства 22 не станет выше или равной заданной скорости. Это связано с тем, что блок 1023 компоновки изображения может точно отслеживать свободное место 23 для парковки до тех пор, пока скорость рассматриваемого транспортного средства 22 не станет выше или равной заданной скорости, что предотвращает позиционное отклонение между положением места 23 для парковки и положением вспомогательного изображения 24 или вспомогательного изображения 25.
[0061]
После того, как блок 1023 компоновки изображения отображает вспомогательное изображение 24 или вспомогательное изображение 25, в случае, когда скорость рассматриваемого транспортного средства 22 становится выше или равной заданной скорости, блок 1023 компоновки изображения запрещает отображение вспомогательного изображения 24 или вспомогательного изображения 25. Это происходит потому, что, когда скорость рассматриваемого транспортного средства 22 выше или равна заданной скорости, накапливаются ошибки, такие как ошибки измерения датчика 6 скорости вращения колеса, ошибки оценки собственного положения одометрии и ошибки в обнаружении свободного места 23 для парковки, так что между положением места 23 для парковки и положением вспомогательного изображения 24 или вспомогательного изображения 25 может возникнуть позиционное отклонение. Поскольку блок 1023 компоновки изображения запрещает отображение вспомогательного изображения 24 или вспомогательного изображения 25, можно предотвратить предоставление недостоверной информации находящемуся в транспортном средстве человеку.
[0062]
Когда рассматриваемое транспортное средство 22 не находится в неподвижном состоянии, другими словами, когда рассматриваемое транспортное средство 22 движется, блок 1023 компоновки изображения отображает вспомогательное изображение 26 в фиксированном положении, отличном от положения свободного места 23 для парковки, как показано на фиг. 3А. Это позволяет находящемуся в транспортном средстве человеку легко понять, что есть свободные места 23 для парковки.
[0063]
В случае, когда рассматриваемое транспортное средство 22 останавливается, когда отображается вспомогательное изображение 26, как показано на фиг. 3А, блок 1023 компоновки изображения переключает отображение с вспомогательного изображения 26 на вспомогательное изображение 24 или вспомогательное изображение 25, как показано на фиг. 3B. Это позволяет находящемуся в транспортном средстве человеку легко понять положение свободного места 23 для парковки.
[0064]
Когда рассматриваемое транспортное средство 22 не находится в неподвижном состоянии, блок 1023 компоновки изображения запрещает отображение вспомогательного изображения 24 или вспомогательного изображения 25. Это связано с тем, что между положением свободного места 23 для парковки и положением вспомогательного изображения 24 или вспомогательного изображения 25 может возникнуть позиционное отклонение в случае, когда блок 1023 компоновки изображения отображает вспомогательное изображение 24 или вспомогательное изображение 25 на свободном месте 23 для парковки, когда рассматриваемое транспортное средство 22 движется. Поскольку блок 1023 компоновки изображения запрещает отображение вспомогательного изображения 24 или вспомогательного изображения 25, можно предотвратить предоставление недостоверной информации находящемуся в транспортном средстве человеку.
[0065]
(Другие варианты осуществления)
Хотя вариант осуществления настоящего изобретения был описан выше, не следует понимать, что описания и чертежи, составляющие часть этого раскрытия, ограничивают данное изобретение. Из этого раскрытия для специалистов в данной области техники будут очевидны различные альтернативные варианты осуществления, примеры и методы работы.
[0066]
Хотя в настоящем варианте осуществления вспомогательное изображение 26, показанное на фиг. 3А, представлено в форме четырехугольника, а вспомогательное изображение 24 и вспомогательное изображение 25, показанные на фиг. 3В, представлены в форме круга, формы не ограничены этими примерами. Вспомогательное изображение 26, вспомогательное изображение 24 и вспомогательное изображение 25 могут иметь любую форму, которую можно отличить одну от других.
[0067]
Хотя в настоящем варианте осуществления блок 106 определения скорости определяет, что рассматриваемое транспортное средство 22 находится в неподвижном состоянии в случае, когда скорость рассматриваемого транспортного средства 22 составляет 0 км/ч, настоящее изобретение не ограничивается этой операцией. Не всегда верно, что когда скорость рассматриваемого транспортного средства 22 составляет 0 км/ч, рассматриваемое транспортное средство 22 находится в неподвижном состоянии. Например, даже когда находящийся в транспортном средстве человек нажимает на педаль тормоза, и скорость рассматриваемого транспортного средства 22 становится равной 0 км/ч, существует вероятность того, что рассматриваемое транспортное средство 22 может скользить, когда земля влажная или когда шины изношены. Другими словами, даже когда измеритель скорости показывает 0 км/ч, скорость, обнаруженная датчиком 6 скорости вращения колеса, не всегда составляет 0 км/ч. Соответственно, блок 106 определения скорости может устанавливать допуск и определять, что рассматриваемое транспортное средство 22 остановилось, когда скорость рассматриваемого транспортного средства 22 ниже или равна заданной скорости. Таким образом, определение позволяет блоку 106 определения скорости определять в различных дорожных условиях, находится ли рассматриваемое транспортное средство 22 в неподвижном состоянии.
[0068]
Здесь блок 106 определения скорости может определить, был ли задействован стояночный тормоз рассматриваемого транспортного средства 22, и может определить, что рассматриваемое транспортное средство 22 находится в неподвижном состоянии, когда задействован стояночный тормоз. Таким образом, это определение позволяет блоку 106 определения скорости определять в различных дорожных условиях, находится ли рассматриваемое транспортное средство 22 в неподвижном состоянии. Здесь стояночный тормоз, упомянутый выше, включает в себя ручной тормоз и ножной тормоз.
[0069]
В качестве альтернативы, блок 106 определения скорости может определить, находится ли рычаг переключения передач рассматриваемого транспортного средства 22 в положении парковки, и определить, находится ли рассматриваемое транспортное средство 22 в неподвижном состоянии, когда рычаг переключения находится в положении парковки. Таким образом, это определение позволяет блоку 106 определения скорости определять в различных дорожных условиях, находится ли рассматриваемое транспортное средство 22 в неподвижном состоянии. Хотя в этом примере определяется, находится ли рычаг переключения передач в положении парковки, при этом определении может быть определено, что рычаг переключения передач находится в положении парковки в случае, когда нажата кнопка парковки для перехода в режим парковки, и транспортное средство переведено в режим парковки.
[0070]
Альтернативно, блок 106 определения скорости может определять, является ли скорость рассматриваемого транспортного средства ниже или равной заданной скорости (например, 5 км/ч или менее), заданной заранее, и может определять, что рассматриваемое транспортное средство находится в неподвижном состоянии, когда определено, что скорость транспортного средства ниже или равна заданной скорости. Таким образом, это определение позволяет блоку 106 определения скорости отображать первое вспомогательное изображение, когда скорость становится ниже или равной заданной скорости даже до того, как рассматриваемое транспортное средство останавливается. Таким образом, возможно отобразить первое вспомогательное изображение для находящегося в транспортном средстве человека в соответствующий момент времени.
[0071]
В качестве альтернативы, блок 106 определения скорости может определять, является ли скорость рассматриваемого транспортного средства ниже или равной заданной скорости (например, 5 км/ч или менее), заданной заранее, и, в случае, когда определено, что скорость транспортного средства ниже или равна заданной скорости, может определять, выполняется ли операция замедления в рассматриваемом транспортном средстве. В случае, когда определено, что выполняется операция замедления, блок 106 определения скорости может оценить, что рассматриваемое транспортное средство останавливается, и определить, что рассматриваемое транспортное средство остановилось. Таким образом, это определение позволяет блоку 106 определения скорости отображать первое вспомогательное изображение в случае, когда операция замедления выполняется на скорости, меньшей или равной заданной скорости, даже до того, как рассматриваемое транспортное средство останавливается. Таким образом, возможно отобразить первое вспомогательное изображение для находящегося в транспортном средстве человека в соответствующий момент времени. Следует отметить, что операция замедления в настоящем варианте осуществления означает состояние, в котором тормозной исполнительный механизм действует, и, таким образом, включает в себя не только управление тормозным исполнительным механизмом находящимся в транспортном средстве человеком, но также и случай, когда тормозной исполнительный механизм действует без управления находящимся в транспортном средстве человеком.
[0072]
Следует отметить, что в настоящем варианте осуществления режим управления в то время, когда блок 104 обработки информации датчика обнаруживает свободное место для парковки, может представлять собой либо ручное управление находящимся в транспортном средстве человеком, либо автоматическое управление.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
[0073]
1 контроллер
2a-2d камеры
3 датчик угла поворота рулевого колеса
6 датчик скорости вращения колеса
7 датчик пространственного распознавания
8 интерфейс ввода
9 дисплей
10 ЭБУ управления транспортным средством
11 исполнительный механизм
101 блок генерации изображения окрестностей
102 блок генерации составного изображения
103 блок хранения пиктограмм
104 блок обработки информации датчика
105 блок вычисления помощи при парковке
106 блок определения скорости
1021 блок генерации вспомогательного изображения
1022 блок управления переключением отображения
1023 блок компоновки изображения
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2017 |
|
RU2729330C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ ДЛЯ УСТРОЙСТВА ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2017 |
|
RU2734643C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2017 |
|
RU2734740C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2019 |
|
RU2804496C1 |
| СПОСОБ ПОМОЩИ ПАРКОВКИ ДЛЯ УСТРОЙСТВА УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2741680C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2016 |
|
RU2714656C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2020 |
|
RU2791347C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2740661C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОМЕХ, СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ, СПОСОБ ПОМОЩИ ПРИ ОТЪЕЗДЕ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПОМЕХ | 2016 |
|
RU2720501C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И АППАРАТУРА УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2744447C1 |
Изобретение относится к способам и устройствам помощи при парковке. Способ помощи при парковке для устройства помощи при парковке содержит этапы, на которых определяют, остановилось ли рассматриваемое транспортное средство, и в случае, когда определено, что рассматриваемое транспортное средство остановилось, отображают первое вспомогательное изображение в положении свободного места для парковки на изображении окрестностей до начала управления парковкой посредством ввода от находящегося в транспортном средстве человека. В случае, когда свободное место для парковки обнаружено около рассматриваемого транспортного средства, когда рассматриваемое транспортное средство не находится в неподвижном состоянии, отображают вспомогательное изображение в положении, отличном от положения свободного места для парковки на изображении окрестностей. Устройство помощи при парковке содержит схему обработки информации датчика, схему генерации изображения окрестностей, схему отображения изображения, которая отображает первое вспомогательное изображение в положении свободного места для парковки на изображении окрестностей и схему определения остановки, которая определяет, остановилось ли рассматриваемое транспортное средство. Достигается повышение безопасности при парковке транспортного средства. 3 н. и 9 з.п. ф-лы, 6 ил.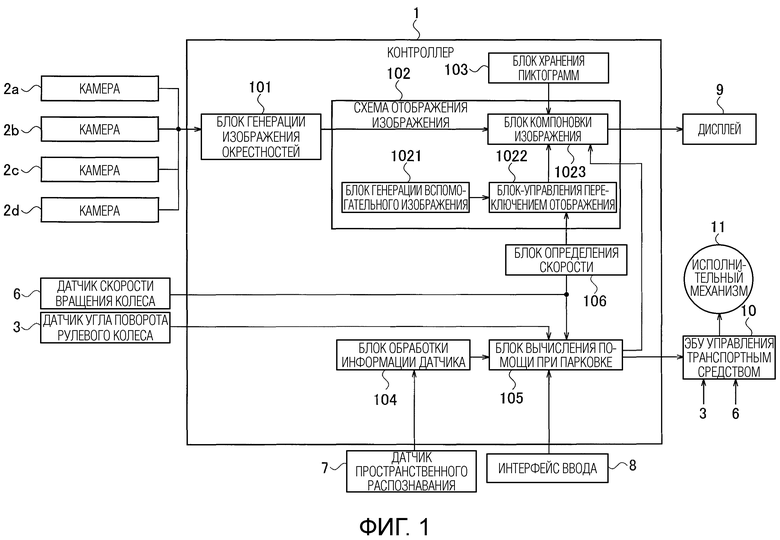
1. Способ помощи при парковке для устройства помощи при парковке, которое обнаруживает свободное место для парковки около рассматриваемого транспортного средства и отображает первое вспомогательное изображение в положении свободного места для парковки на изображении окрестностей, которое представляет собой вид сверху области, включающей в себя рассматриваемое транспортное средство, при этом первое вспомогательное изображение указывает свободное место для парковки, причем способ помощи при парковке содержит этапы, на которых:
определяют, остановилось ли рассматриваемое транспортное средство; и
в случае, когда определено, что рассматриваемое транспортное средство остановилось, отображают первое вспомогательное изображение в положении свободного места для парковки на изображении окрестностей до начала управления парковкой посредством ввода от находящегося в транспортном средстве человека.
2. Способ помощи при парковке для устройства помощи при парковке, которое обнаруживает свободное место для парковки около рассматриваемого транспортного средства и отображает первое вспомогательное изображение на изображении окрестностей, которое представляет собой вид сверху области, включающей в себя рассматриваемое транспортное средство, при этом первое вспомогательное изображение указывает, что существует свободное место для парковки, причем способ помощи при парковке содержит этап, на котором:
в случае, когда свободное место для парковки обнаружено около рассматриваемого транспортного средства, когда рассматриваемое транспортное средство не находится в неподвижном состоянии, отображают вспомогательное изображение в положении, отличном от положения свободного места для парковки на изображении окрестностей, причем вспомогательное изображение указывает, что обнаружено свободное место для парковки.
3. Способ помощи при парковке по п.1 или 2, в котором
определяется, составляет ли скорость рассматриваемого транспортного средства 0, и
в случае, когда скорость рассматриваемого транспортного средства составляет 0, определяется, что рассматриваемое транспортное средство остановилось.
4. Способ помощи при парковке по п.1 или 2, в котором
определяется, включен ли стояночный тормоз рассматриваемого транспортного средства, и
в случае, когда стояночный тормоз включен, определяется, что рассматриваемое транспортное средство остановилось.
5. Способ помощи при парковке по п.1 или 2, в котором
определяется, находится ли рычаг переключения передач рассматриваемого транспортного средства в положении парковки, и
в случае, когда рычаг переключения передач находится в положении парковки, определяется, что рассматриваемое транспортное средство остановилось.
6. Способ помощи при парковке по п.1 или 2, в котором
определяется, является ли скорость рассматриваемого транспортного средства ниже или равной заданной скорости, заданной заранее, и
в случае, когда определено, что скорость рассматриваемого транспортного средства ниже или равна заданной скорости, определяется, что рассматриваемое транспортное средство остановилось.
7. Способ помощи при парковке по п.1 или 2, в котором
определяется, является ли скорость рассматриваемого транспортного средства ниже или равной заданной скорости, заданной заранее,
в случае, когда определено, что скорость рассматриваемого транспортного средства ниже или равна заданной скорости, определяется, выполняется ли операция замедления в рассматриваемом транспортном средстве, и
в случае, когда определено, что выполняется операция замедления, оценивается, что рассматриваемое транспортное средство останавливается, и определяется, что рассматриваемое транспортное средство остановилось.
8. Способ помощи при парковке по п.1 или 2, в котором
после отображения первого вспомогательного изображения первое вспомогательное изображение остается отображенным до тех пор, пока скорость рассматриваемого транспортного средства не станет выше или равной заданной скорости.
9. Способ помощи при парковке по п.8, в котором
после отображения первого вспомогательного изображения в случае, когда скорость рассматриваемого транспортного средства становится выше или равной заданной скорости, отображение первого вспомогательного изображения запрещается.
10. Способ помощи при парковке по п.2, в котором
в случае, когда рассматриваемое транспортное средство остановилось, пока отображается второе вспомогательное изображение, упомянутое вспомогательное изображение переключается на первое вспомогательное изображение.
11. Способ помощи при парковке по п.1 или 2, в котором
определяется, остановилось ли рассматриваемое транспортное средство, и
в случае, когда определено, что рассматриваемое транспортное средство не находится в неподвижном состоянии, отображение первого вспомогательного изображения запрещено.
12. Устройство помощи при парковке, содержащее:
схему обработки информации датчика, которая обнаруживает свободное место для парковки около рассматриваемого транспортного средства;
схему генерации изображения окрестностей, которая генерирует изображение окрестностей, которое представляет собой вид сверху окрестностей транспортного средства;
схему отображения изображения, которая отображает первое вспомогательное изображение в положении свободного места для парковки на изображении окрестностей, причем первое вспомогательное изображение указывает свободное место для парковки; и
схему определения остановки, которая определяет, остановилось ли рассматриваемое транспортное средство, причем
в случае, когда схемой определения остановки определено, что рассматриваемое транспортное средство остановилось, схема отображения изображения отображает первое вспомогательное изображение в положении свободного места для парковки на изображении окрестностей до начала управления парковкой посредством ввода от находящегося в транспортном средстве человека.
| US 9043083 B2, 26.05.2015 | |||
| JP 6044334 B2, 07.07.2014 | |||
| US 2016078763 A1, 17.03.2016 | |||
| WO 2017068696 A1, 27.04.2017. |

