Изобретение относится к железнодорожному транспорту и может быть использовано как вспомогательная система для определения точки остановки железнодорожного подвижного состава при закреплении механизированными устройствами, преимущественно в станционных парках.
Известна входящая в автоматизированную систему закрепления железнодорожного подвижного состава подсистема прицельной остановки поезда, снабженная пунктом определения колесной пары и пунктами определения длины состава, путевыми ретрансляторами сигналов и устройствами отображения, устройства электрической централизации и цепи увязки с ними, подсистема электропитания, связанные с пультом управления через, по меньшей мере, один единый контроллер, при этом подсистема связи дополнительно снабжена диагностическим устройством отображения, а пункт определения колесной пары и пункт определения длины состава содержат пункты счета осей, при этом расчет длины принимаемого поезда производится на основе определения межосевых расстояний (RU 2598919, B61L 7/00, 10.10.2016).
Недостатками известного технического решения являются недостаточная надежность работы, значительное количество оборудования и большие временные затраты для остановки и последующего закрепления поезда.
В качестве прототипа выбрана подсистема прицельной остановки поезда, входящая в состав автоматизированной системы закрепления железнодорожного подвижного состава, и содержащая, по меньшей мере, один контроллер и связанные с ним средства для идентификации типов подвижных единиц, пункт фиксации момента входа поезда в зону прицельной остановки, пункт регистрации колеса в зоне закрепления, устройства передачи данных на локомотив и средства дистанционного контроля положения закрепляемой колесной пары в зоне устройств закрепления. Средства для идентификации типов подвижных единиц поезда содержат рельсовую цепь наложения и, по меньшей мере, два датчика регистрации прохода колеса, расположенные друг от друга на расстоянии, меньшем минимально возможного расстояния между двумя колесными парами всех существующих подвижных железнодорожных единиц. Пункт фиксации момента входа поезда в зону прицельной остановки содержит, по меньшей мере, один датчик регистрации прохода колеса, либо изоляционный стык рельсовой цепи, ограничивающие, соответственно, границу станционного пути, на который принимается закрепляемый подвижной состав. Пункт регистрации колеса в зоне закрепления содержит, по меньшей мере, два датчика регистрации прохода колеса. Устройства передачи данных на локомотив содержат путевые устройства системы автоматического управления тормозами. Устройства передачи данных на локомотив выполнены в виде устройств отображения, установленных вдоль каждого станционного пути с механизированными устройствами закрепления. Устройства передачи данных на локомотив содержат радиоканал, связанный с контроллером и бортовым устройством отображения в кабине локомотива для передачи машинисту информации о расстоянии закрепляемой оси поезда до устройств закрепления. Контроллер предназначен для сбора всей необходимой информации, ее обработки и выдачи соответствующих команд для обеспечения прицельной остановки поезда.
Для осуществления прицельной остановки поезда производится определение межосевых расстояний, расстояния от целевой колесной пары до первой колесной пары поезда. Для контроля в реальном времени расстояния, оставшегося до остановки поезда, при помощи двух датчиков регистрации прохода колеса, расположенных друг от друга на расстоянии, меньшем минимально возможного расстояния двух колесных пар всех существующих подвижных железнодорожных единиц, определяют сначала скорость соответствующей подвижной единицы поезда, а затем и все соответствующие межосевые расстояния (RU 2706751, B61K 7/00, B61L 25/00, 20.11.2019).
Недостатком известной подсистемы прицельной остановки поезда является определение межосевых расстояний, расстояния от целевой колесной пары до первой колесной пары поезда и для контроля в реальном времени расстояния, оставшегося до остановки поезда известными в уровне техники методами, в которых при помощи двух датчиков регистрации прохода колеса, расположенных друг от друга на расстоянии, меньшем минимально возможного расстояния двух колесных пар всех существующих подвижных железнодорожных единиц, определяют сначала скорость соответствующей подвижной единицы поезда, а затем и все соответствующие межосевые расстояния. В случае неравномерного движение поезда над этими датчиками колеса, возникают значительные ошибки в определении соответствующих расстояний, а в случае непредвиденной остановки поезда при проходе над этими датчиками состава поезда, измерение каких-либо расстояний этим методом вообще становится невозможным.
Технический результат изобретения заключается в упрощении и повышении точности определения точки остановки железнодорожного подвижного состава вне зависимости от его направления движения.
Технический результат достигается тем, что система для позиционирования железнодорожного подвижного состава при закреплении механизированными устройствами содержит две группы устройств фиксации прохождения подвижной единицы, размещенные на заданном расстоянии до и после установленного на пути механизированного устройства закрепления, причем каждая из групп включает в себя не менее двух устройств фиксации прохождения подвижной единицы, расстояние между которыми больше максимального расстояния между двумя колесами разных вагонных тележек, каждое устройство фиксации прохождения подвижной единицы по каналу связи подключено к вычислительному устройству, соединенному с блоком моделирования и с блоком памяти, в котором записана база данных подвижных составов, на заданном расстоянии от механизированного устройства закрепления установлено устройство определения расстояния, подключенное к вычислительному устройству, к выходу которого подключен передатчик, соединенный по радиоканалу с приемопередатчиком машиниста железнодорожного подвижного состава, и по кабельной сети с устройствами отображения информации, установленными вдоль пути и находящимися в зоне видимости машиниста локомотива.
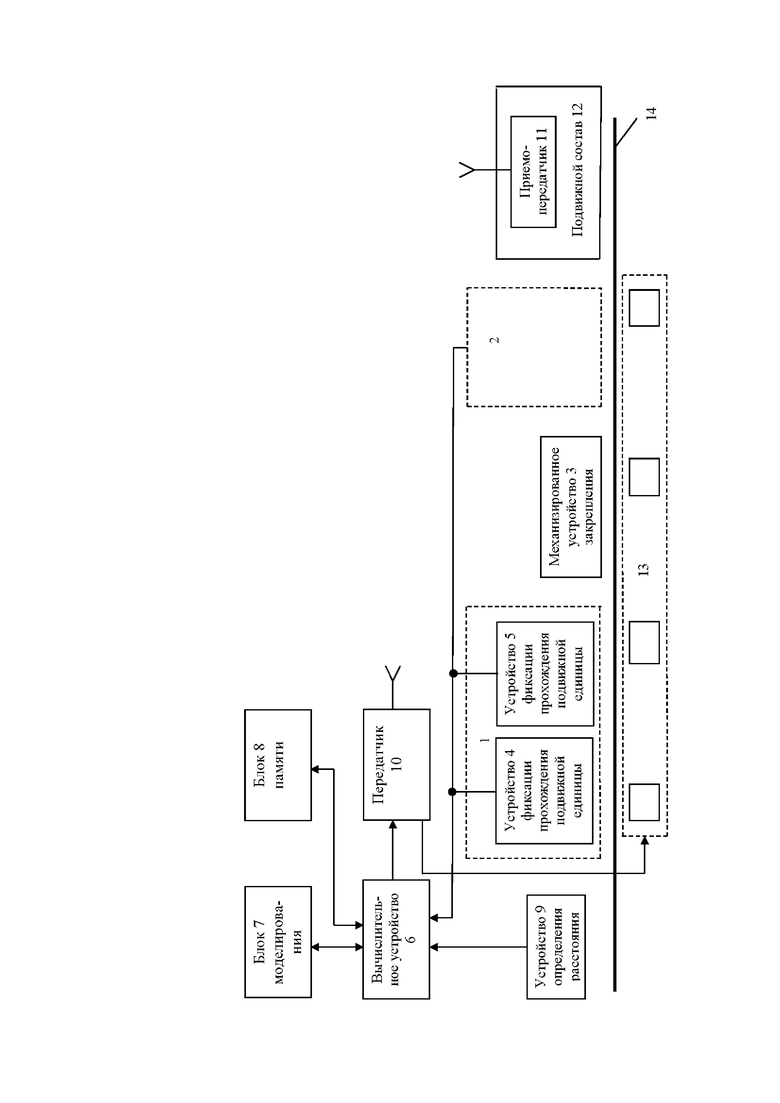
На чертеже представлена схема системы для позиционирования железнодорожного подвижного состава при закреплении механизированными устройствами.
Система для позиционирования железнодорожного подвижного состава при закреплении механизированными устройствами содержит две группы 1 и 2 устройств фиксации прохождения подвижной единицы, размещенные на заданном расстоянии до и после установленного на пути механизированного устройства 3 закрепления, причем каждая из групп включает в себя не менее двух устройств 4 и 5 фиксации прохождения подвижной единицы, расстояние между которыми больше максимального расстояния между двумя колесами разных вагонных тележек, каждое устройство (4 и 5) фиксации прохождения подвижной единицы по каналу связи подключено к вычислительному устройству 6, соединенному с блоком 7 моделирования и с блоком 8 памяти, в котором записана база данных подвижных составов, на заданном расстоянии от механизированного устройства 3 закрепления установлено устройство 9 определения расстояния, подключенное к вычислительному устройству 6, к выходу которого подключен передатчик 10, соединенный по радиоканалу с приемопередатчиком 11 машиниста железнодорожного подвижного состава 12, и по кабельной сети с устройствами 13 отображения информации, установленными вдоль пути 14 и находящимися в зоне видимости машиниста локомотива.
Система для позиционирования железнодорожного подвижного состава при закреплении механизированными устройствами работает следующим образом.
В предлагаемой системе использованы две группы (1 и 2) устройств (4 и 5) фиксации прохождения подвижной единицы, размещенные на заданном расстоянии до и после установленного на пути 14 механизированного устройства 3 закрепления. В отличие от известных устройств это позволяет использовать данную систему как при движении в четном, так и при движении в нечетном направлении.
Устройства (4 и 5) фиксации прохождения подвижной единицы расположены на расстоянии большем, чем максимальное расстояние между двумя колесами разных вагонных тележек. За счет такого расположения устройств фиксации прохождения подвижной единицы контролируется полное проследование состава и обеспечивается закрепление подвижного состава при его движении в направлении противоположном, движению к устройству 9 определения расстояния.
Информация от устройства 9 определения расстояния и устройств (4 и 5) фиксации прохождения подвижной единицы поступает в вычислительное устройство 6. Количество устройств фиксации прохождения подвижной единицы можно увеличивать для повышения точности.
Устройства 4 и 5 фиксации прохождения подвижной единицы предназначены для фиксирования факта прохода колесной пары и времени данного события. С помощью времени прохода колесной пары производится расчет количества колесных пар в вагонной тележке, длины базы вагона, расстояние между колесными парами. Данные параметры с помощью вычислительного устройства 6 сравниваются со сформированной в блоке 8 памяти базой подвижного состава. На основе сравнения производится построение вагонной модели с помощью блока 7 моделирования. В вагонной модели просчитываются расстояния между колесными парами, типы подвижных единиц (тип вагонов и локомотивов), определяется положение локомотива, относительно направления движения. Например, если состав движется в четном направлении движении и первая подвижная единица определена как локомотив, то можно сделать вывод, что закрепление будет происходить по первому вагону, если в нечетном направлении, то закрепление будет производиться по последнему вагону.
В случае неравномерного движения подвижного состава вагонная модель будет корректироваться с использованием устройства определения расстояния 9, с помощью которого определяется скорость движения.
На основании модели определяется закрепляемая часть: голова или хвост. После чего производится определение необходимой точки остановки по формуле:
где Lост – расстояние от устройства определения расстояния до первой подвижной единицы, м;
LУЗ – длина от устройства определения расстояния до устройства закрепления, задаваемое при проектировании, м;
LВ – расстояние, получаемое от вагонной модели, которое включает в себя длину локомотива (при закреплении с головы), расстояние от автосцепки первого вагона до необходимой для закрепления колесной пары, м.
Расстояние, определенное по формуле, сравнивается вычислительным устройством 6 с расстоянием, получаемым от устройства определения расстояния 9. В процессе движения железнодорожного подвижного состава информация о расстоянии до необходимой точки остановки поступает по радиоканалу в приемопередатчик 11 машиниста, а также по кабельной сети в устройства 13 отображения информации, котоые установлены вдоль пути 14 и находятся в зоне видимости машиниста локомотива. Состав считается правильно позиционированным в том случае, если требуемая вагонная тележка находится в заданном интервале.
Таким образом, предлагаемое изобретение обеспечивает простоту и точность позиционирования подвижного состава вне зависимости от его направления движения к устройству закрепления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического закрепления подвижного состава | 2024 |
|
RU2836918C1 |
| Автоматизированная система закрепления железнодорожного подвижного состава | 2019 |
|
RU2706751C1 |
| Система управления устройствами закрепления железнодорожного подвижного состава | 2017 |
|
RU2682519C1 |
| СПОСОБ ПРИЦЕЛЬНОЙ ОСТАНОВКИ ПОЕЗДА НА УЧАСТКЕ ПУТИ И СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2020 |
|
RU2751589C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ УСТРОЙСТВАМИ ЗАКРЕПЛЕНИЯ ПОЕЗДА | 2015 |
|
RU2598919C1 |
| Способ формирования информационной модели поезда | 2019 |
|
RU2718750C1 |
| Устройство контроля нарушения нижнего габарита в железнодорожном составе (УКНГ "Неваляшка") | 2024 |
|
RU2840916C1 |
| Рычажно-пружинное устройство (варианты) и способ закрепления железнодорожного подвижного состава | 2018 |
|
RU2694881C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ КРУПНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СТАНЦИЙ | 2009 |
|
RU2403162C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ СВОБОДНОСТИ УЧАСТКОВ ПУТИ ОТ ПОДВИЖНОГО СОСТАВА | 2015 |
|
RU2600175C1 |
Изобретение относится к вспомогательным средствам для определения точки остановки железнодорожного подвижного состава при закреплении механизированными устройствами в станционных парках. Система содержит две группы устройств фиксации (1) и (2) прохождения подвижной единицы, устройство (3) закрепления, каждая из групп включает в себя устройства (4) и (5) фиксации прохождения подвижной единицы, расстояние между которыми больше максимального расстояния между двумя колесами разных вагонных тележек, устройства (4) и (5) фиксации подключены к вычислительному устройству (6), соединенному с блоком (7) моделирования и с блоком (8) памяти с записанной базой данных подвижных составов, устройство (9) определения расстояния, передатчик (10), соединенный по радиоканалу с приемопередатчиком (11) машиниста локомотива, устройства (13) отображения информации вдоль пути (14), находящиеся в зоне видимости машиниста. Достигается повышение точности и упрощение определения точки остановки железнодорожного подвижного состава вне зависимости от направления движения. 1 ил.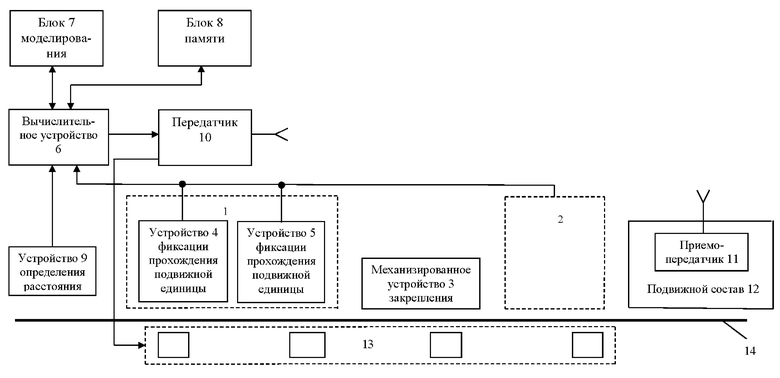
Система для позиционирования железнодорожного подвижного состава при закреплении механизированными устройствами, содержащая две группы устройств фиксации прохождения подвижной единицы, размещенные на заданном расстоянии до и после установленного на пути механизированного устройства закрепления, причем каждая из групп включает в себя не менее двух устройств фиксации прохождения подвижной единицы, расстояние между которыми больше максимального расстояния между двумя колесами разных вагонных тележек, каждое устройство фиксации прохождения подвижной единицы по каналу связи подключено к вычислительному устройству, соединенному с блоком моделирования и с блоком памяти, в котором записана база данных подвижных составов, на заданном расстоянии от механизированного устройства закрепления установлено устройство определения расстояния, подключенное к вычислительному устройству, к выходу которого подключен передатчик, соединенный по радиоканалу с приемопередатчиком машиниста железнодорожного подвижного состава, и по кабельной сети с устройствами отображения информации, установленными вдоль пути и находящимися в зоне видимости машиниста локомотива.
| СПОСОБ ПРИЦЕЛЬНОЙ ОСТАНОВКИ ПОЕЗДА НА УЧАСТКЕ ПУТИ И СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2020 |
|
RU2751589C1 |
| Автоматизированная система закрепления железнодорожного подвижного состава | 2019 |
|
RU2706751C1 |
| Система управления устройствами закрепления железнодорожного подвижного состава | 2017 |
|
RU2682519C1 |
| Система закрепления составов на путях железнодорожной станции | 2016 |
|
RU2618656C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ УСТРОЙСТВАМИ ЗАКРЕПЛЕНИЯ ПОЕЗДА | 2015 |
|
RU2598919C1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |

