Область техники
Объектом изобретения является способ независимого управления подъемного или тягового каната в каждой канатной тележке в системе канатных тележек, которые движутся при помощи рабочего каната или движущегося каната, который вращается или движется в одинаковом направлении, которое может быть любым в случае необходимости. В каждой канатной тележке барабан управляется независимо одновременно, причем канатная тележка работает независимо от других канатных тележек в системе канатных тележек. Способ независимого одновременного управления барабаном в отдельных канатных тележках посредством рабочего каната или движущегося каната используется приоритетно при специальных устройствах с аккумуляторами, которые обозначаются термином RELAZ. Изобретение также широко используется для длинных канатных дорог, ломанных канатных дорог, и для использования нескольких канатных тележек на одной канатной дороге или нескольких канатных дорогах при транспортировке грузов в области лесного хозяйства, сельского хозяйства, строительства и транспорта в целом.
Уровень техники
Из предшествующего уровня техники известные стандартные способы управления барабаном подъемного или тягового каната не предоставляют условия для эффективной работы одновременно нескольких канатных тележек на несущем канате, или нескольких несущих канатах, или на одной канатной дороге, или нескольких канатных дорогах, которые приводятся в движение рабочим канатом или движущимся канатом. Из предшествующего уровня техники известные стандартные способы управления барабаном не позволяют независимо использовать основной режим барабана, тормозной режим и обратный ход барабана в связи с управлением разматывания и наматывания подъемного или тягового каната на барабан в нескольких канатных тележках. Таким способом, что каждая канатная тележка в системе канатных тележек приводится в движение одним и тем же рабочим канатом без изменения направления его вращения или движения в циркуляционной канатной системе. Из предшествующего уровня техники известные способы управления барабаном для разматывания и наматывания подъемного или тягового каната не предоставляют независимость каждой канатной тележки от других канатных тележек приводимых в движение рабочим канатом или движущимся канатом.
В настоящее время известно решение по PP 37 - 2008 с названием Механическое рекуперационное канатное устройство с дополнительным противовесом и гравитационной канатной тележкой. В этом решении используется для управления барабаном подъемного или тягового каната в канатной тележке один рабочий канат, но в частях канатной тележки не позволяется осуществлять эффективное независимое управление барабанами во время вращения или движения рабочего каната в одном направлении в циркуляционной канатной системе.
Это решение и все до сих пор известные способы управления барабаном не позволяют осуществлять эффективное управление барабаном для разматывания и наматывания подъемного или тягового каната и не позволяют осуществлять эффективную работу нескольких канатных тележек на канатной дороге одновременно. Таким способом, что канатные тележки приводятся в движение рабочим канатом или движущимся канатом, который движется в одинаковом направлении, которое может быть любым в случае необходимости, причем каждая канатная тележка в системе канатных тележек работает эффективно и независимо от других канатных тележек в системе канатных тележек.
Раскрытие изобретения
Сутью изобретения является способ управления барабаном подъемного или тягового каната в каждой канатной тележке в системе канатных тележек, которые работают на несущем канате, или нескольких несущих канатах, или на одной канатной дороге или нескольких канатных дорогах и они независимо приводятся в движение, и их функции обеспечиваются посредством движения рабочего каната или движущегося каната. Рабочий канат в циркуляционной канатной системе, или движущийся канат в канатной системе вращается или движется всегда в одном направлении, которое может быть любым в случае необходимости. При помощи одного рабочего каната или движущегося каната, который вращается или движется в канатной системе в одинаковом направлении, которое может быть любым в случае необходимости, обеспечивается привод барабанов через разъемный канатный шкив во всех канатных тележках, которыми рабочий канат или движущийся канат проходит. Разъемный канатный шкив реализован в виде блока с параболическим желобом.
В каждой канатной тележке в системе канатных тележек посредством рабочего или движущегося каната обеспечивается вращение разъемного канатного шкива, который вращается всегда в направлении вращения или движения рабочего каната или движущегося каната. Вращением или движением рабочего каната или движущегося каната, который вращается или движется всегда в одном направлении, которое может быть любым в случае необходимости, в каждой тележке в системе канатных тележек обеспечивается основной режим барабана, нейтральный режим канатной тележки или тормозной режим барабана и обратный ход барабана. Основной режим барабана в канатной тележке обеспеченный тогда, когда барабан подъемного или тягового каната вращается в том же направлении, что и направление вращения разъемного шкива и направление рабочего каната в циркуляционной канатной системе или движущегося каната в канатной системе. Тормозной режим барабана в канатной тележке обеспеченный тогда, когда обеспечено вращение или движение рабочего каната в циркуляционной канатной системе, или движущегося каната в канатной системе и барабан подъемного или тягового каната заблокирован. Тормозной режим барабана осуществляется во время нейтрального режима тележки. Обратный ход барабана в канатной тележке обеспечивается в том случае, если барабан подъемного или тягового каната вращается в направлении, противоположном направлению вращения разъемного канатного шкива и направлению вращения рабочего каната в циркуляционной канатной системе или движущегося каната в канатной системе. В каждой тележке в системе канатных тележек основной режим барабана, тормозной режим барабана или нейтральный режим тележки и обратный ход барабана реализируется по мере необходимости независимо от других тележек. Таким образом обеспечена эффективная работа нескольких канатных тележек в системе канатных тележек одновременно посредством рабочего каната или движущегося каната, который вращается или движется всегда в одном направлении которое может быть любым в случае необходимости.
Основным режимом барабана, тормозным режимом барабана и обратным ходом барабана управляется разматывание и наматывание подъемного или тягового каната на барабане в каждой канатной тележке отдельно в целой системе канатных тележек. Система канатных тележек управляется движением рабочего каната или движением движущегося каната в одном направлении, которое может быть любым в случае необходимости, в канатной системе. Разматывание и наматывание подъемного или тягового каната зависит от направления наматывания подъемного или тягового каната на барабане. Дальше при реализации нейтрального режима тележки или тормозного режима барабана не происходит разматывание и наматывание подъемного или тягового каната на барабан в тележке. Циркуляционная канатная система или канатная система движущегося каната натягивается на необходимое монтажное натяжение соответствующим способом.
С точки зрения изготовления, барабан для разматывания и наматывания подъемного или тягового каната может быть изготовлен как любое устройство для любого каната, которое служит для разматывания и наматывания каната, или это может быть наматывающее устройство, лебедка и т.п.
Преимущество этого способа согласно изобретению заключается в том, что разматыванием каната с барабана в тележке предоставляется одновременно активное высовывание свободного конца подъемного или тягового каната из тележки. Каждая тележка в системе канатных тележек имеет функцию активного высовывания свободного конца подъемного или тягового каната из тележки.
С точки зрения изготовления канатная тележка может быть тележкой для лесной канатной дороги или тележкой для любой канатной дороги.
Способ независимого одновременного управления барабанами в системе канатных тележек обеспечивается вращением или движением рабочего каната в циркуляционной канатной системе. При использовании рабочего каната или движущегося каната для независимого управления барабанами в каждой тележке в системе канатных тележек, рабочий канат или движущийся канат проходит в приводном агрегате через канатный шкив или канатные шкивы, или через надлежащим образом приспособленное наматывающее устройство.
Далее другим вариантом реализации способа при использовании движущегося каната для независимого управления барабанами в каждой тележке в системе канатных тележек движущийся канат в приводном агрегате проходит наматывающим устройством или наматывающими устройствами. Далее одним из вариантов изготовления движущийся канат в канатной системе движется таким способом, что с одного наматывающего устройства движущийся канат разматывается и на второе наматывающее устройство движущийся канат наматывается и/или в противоположном направлении. Далее ведение и привод рабочего каната или движущегося каната может быть реализован различными способами по мере необходимости.
Из этого следует, что способ независимого одновременного управления барабаном подъемного или тягового каната в каждой тележке в системе канатных тележек посредством рабочего каната или движущегося каната в канатной системе, который вращается или движется в одном направлении, которое может быть любым в случае необходимости, имеет широкое применение. Возможности применения данного способа не ограничивают диапазон применения данного изобретения.
Краткое описание чертежей
На чертежах изображен способ управления барабаном подъемного или тягового каната в каждой тележке в системе канатных тележек, которые приводятся в движение при помощи рабочего каната или движущегося каната, который вращается или движется в одинаковом направлении, которое может быть любым в случае необходимости таким образом, что в каждой канатной тележке находится барабан одновременно независимо управляемый, причем работа каждой канатной тележки не зависит от работы других канатных тележек в системе канатных тележек.
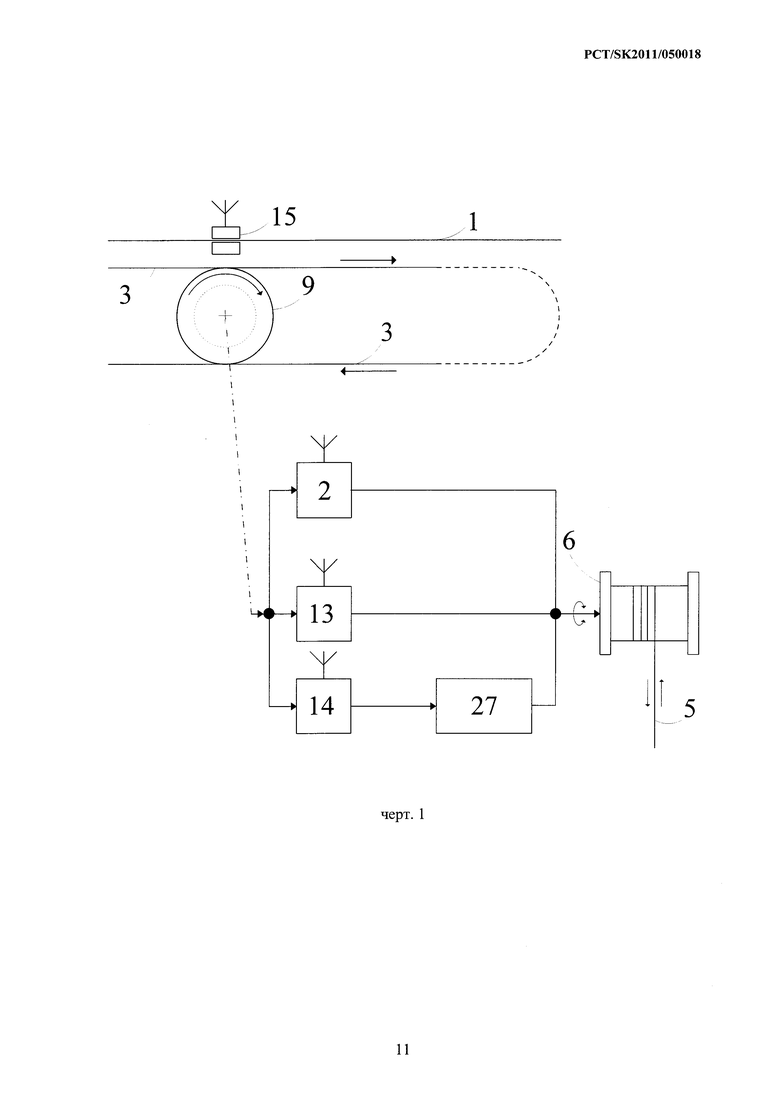
Чертеж № 1 изображает способ независимого управления барабаном подъемного или тягового каната в каждой тележке в системе канатных тележек,
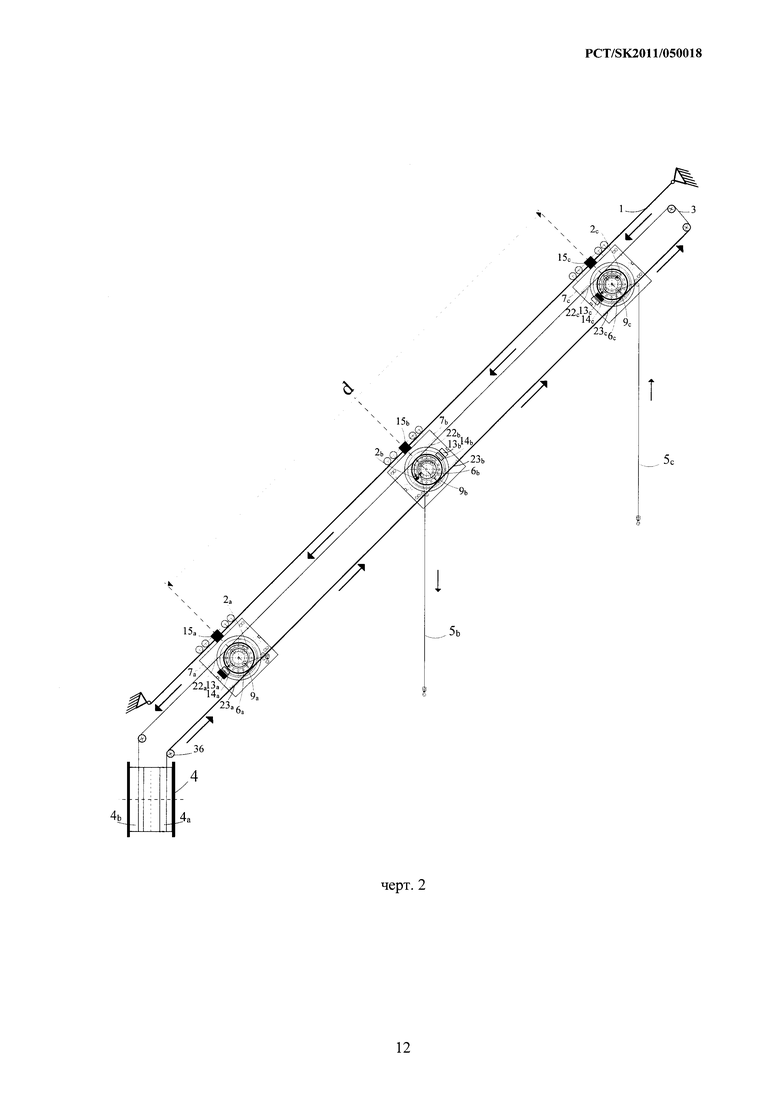
чертеж № 2 изображает способ независимого управления барабаном подъемного или тягового каната в каждой тележке в системе канатных тележек на одном несущем канате,
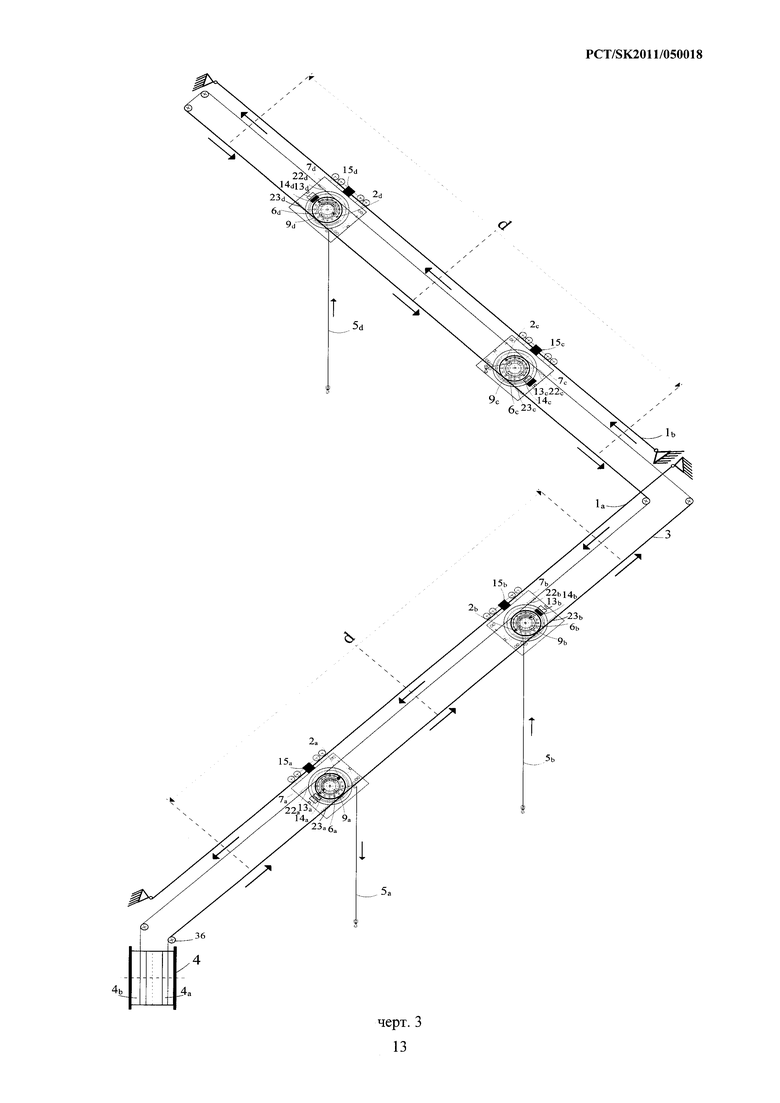
чертеж № 3 изображает способ независимого управления барабаном подъемного или тягового каната в каждой тележке в системе канатных тележек на нескольких несущих канатах.
Осуществление изобретения
На черт. № 1 изображен способ управления барабаном 6 подъемного или тягового каната 5 в каждой тележке в системе канатных тележек. Система канатных тележек приводится в движение рабочим канатом 3 или движущимся канатом 3, который вращается или движется в канатной системе в одинаковом направлении, которое может быть любым в случае необходимости. Этим вращением или движением рабочего каната 3 или движением движущегося каната 3 барабан 6 в каждой канатной тележке независимо управляется таким образом, что работа каждой канатной тележки не зависит от работы других канатных тележек, которые работают в системе канатных тележек. Способ использования основного режима барабана 6 реализуется таким образом, что разъемный канатный шкив 9 в тележках приводится в движение посредством рабочего каната 3 или движущегося каната 3 в одинаковом направлении, которое является направлением вращения или движения рабочего каната 3 в циркуляционной канатной системе, или движущегося каната 3 в канатной системе. В тележках в системе канатных тележек, где требуется основной режим барабана 6, заблокируется муфта 2 и разблокируется тормозное сцепное устройство или тормоз 13, 14, чем передается крутящий момент в одинаковом направлении с разъемного канатного шкива 9 на барабан 6 подъемного или тягового каната. В данном случае барабан 6 вращается в одинаковом направлении, которое является направлением вращения разъемного канатного шкива 9 и направлением вращения или движения рабочего каната 3 или движущегося каната 3, чем обеспечивается основной режим барабана 6. Способ использования тормозного режима барабана 6 реализуется таким образом, что разъемный канатный шкив 9 в тележках приводится в движение посредством рабочего каната 3 или посредством движущегося каната 3 в том же направлении, что и направление вращения или движения рабочего каната 3 в циркуляционной канатной системе или движения движущегося каната 3 в канатной системе. В тележках в системе канатных тележек, где необходимым является тормозной режим барабана 6, разблокируется муфта 2, разблокируется тормозное сцепное устройство или тормоз 14 и блокируется тормозное сцепное устройство или тормоз 13, чем обеспечится вращательное движение рабочего каната 3 в циркуляционной канатной системе, или движение движущегося каната 3 в канатной системе, причем крутящий момент с разъемного канатного шкива 9 не передается на барабан 6 подъемного или тягового каната. В этом случае барабан 6 заблокирован без движения посредством тормозного сцепного устройства или тормоза 13 и разъемный канатный шкив 9 вращается в том же направлении, что и направление вращения или движения рабочего каната или движущегося каната, чем обеспечится тормозной режим барабана 6. Способ применения обратного хода барабана 6 реализуется таким образом, что разъемный канатный шкив 9 в тележках приводится в движение посредством рабочего каната 3 или движущегося каната 3 в одинаковом направлении, которое является направлением вращения или движения рабочего каната 3 в циркуляционной канатной системе или движущегося каната 3 в канатной системе. В тележках в системе канатных тележек, где требуется обратный ход барабана 6, разблокируется муфта 2, заблокируется тормозное сцепное устройство или тормоз 14 и разблокируется тормозное сцепное устройство или тормоз 13, что в тележках создает реверс 27 или обратный ход барабана 6, причем крутящий момент с разъемного канатного шкива 9 передается в обратном направлении вращения на барабан 6. В этом случае на барабан 6 подъемного или тягового каната вращается в направлении, противоположном направлению вращения разъемного канатного шкива 9, чем обеспечится обратный ход барабана 6. В процессе реализации управления барабаном 6 подъемного или тягового каната 5 по мере необходимости в каждой тележке в системе канатных тележек находится тормоз 15 несущего каната заблокированный или, если необходимо тележке двигаться по несущем канате 1 во время управления барабаном 6, тормоз 15 несущего каната разблокирован. Управлением барабаном 6 посредством основного режима барабана 6, тормозного режима барабана 6 и обратного хода барабана 6 управляется разматывание и наматывание подъемного или тягового каната 5, который на барабане 6 намотан в направлении по мере необходимости.
На черт.№ 2 изображен способ управления барабаном 6 подъемного или тягового каната 5 в каждой тележке в системе канатных тележек на одном несущем канате 1, или одной канатной дороге. Рабочий канат 3 в циркуляционной канатной системе или движущийся канат 3 в канатной системе вращается или движется в этом случае в направлении против часовой стрелки, причем в первой канатной тележке 7a посредством способа по изобретению реализуется нейтральный режим тележки или тормозной режим барабана 6a. Тормозной режим барабана 6a достигается разблокированием муфты 2a, разблокированием тормозного сцепного устройства или тормоза 14a и заблокированием тормозного сцепного устройства или тормоза 13a, чем обеспечится вращающееся движение рабочего каната 3 в циркуляционной канатной системе, или движение движущегося каната в канатной системе, причем крутящий момент с канатного шкива 9a не переносится на барабан 6a. Во время тормозного режима барабана 6a не происходит разматывание и наматывание подъемного или тягового каната. Одновременно в канатной тележке 7b, которая на любом расстоянии от канатной тележки 7a, реализуется основной режим барабана 6b. Основной режим барабана 6b достигается заблокированием муфты 2b и разблокированием тормозного сцепного устройства или тормоза 13b, 14b, причем крутящий момент переносится в том же направлении из канатного шкива 9b на барабан 6b. Во время реализации основного режима барабана 6b в этом случае происходит разматывание подъемного или тягового каната 5b. Одновременно в другой канатной тележке 7c, которая на любом расстоянии от канатной тележки 7b, реализуется обратный ход барабана 6c. Обратный ход барабана 6c достигается заблокированием тормозного сцепного устройства или тормоза 14c, разблокированием муфты 2c и разблокированием тормозного сцепного устройства или тормоза 13c причем крутящий момент с канатного шкива 9c переносится в противоположном направлении вращения на барабан 6c. Во время обратного хода барабана 6c в этом случае происходит наматывание подъемного или тягового каната 5c на барабан 6c. Во время реализации способа управления барабаном подъемного или тягового каната в каждой канатной тележке в системе канатных тележек в этом случае заблокирован тормоз 15a, 15b, 15c на несущем канате 1. Таким образом может управляться одновременно несколько канатных тележек, работающих на одном несущем канате или на одной канатной дороге, посредством рабочего или движущегося каната, который не должен менять направление вращения или движения в канатной системе.
На черт. № 3 изображен способ управления барабаном 6 подъемного или тягового каната 5 в каждой канатной тележке в системе канатных тележек согласно изобретению на нескольких несущих канатах, или на нескольких канатных дорогах, или на нескольких несущих канатах одной канатной дороги. Рабочий канат 3 в циркуляционной канатной системе или движущийся канат 3 в канатной системе вращается или движется в этом случае в направлении против часовой стрелки и обеспечивает привод барабанов для всей системы канатных тележек. Во время этого вращения или движения рабочего каната 3 в циркуляционной канатной системе или движущегося каната 3 в канатной системе в канатной тележке 7a, блокированной на несущем канате 1a, реализуется основной режим барабана 6a, в этом случае происходит разматывание подъемного или тягового каната 5a. В канатной тележке 7b, блокированной на несущем канате 1a, реализуется обратный ход барабана 6b, в этом случае происходит наматывание подъемного или тягового каната 5b. На втором несущем канате 1b в канатной тележке 7c реализуется нейтральный ход тележки или тормозной режим барабана 6c, что в этом случае обеспечивает вращение или движение рабочего каната 3 в циркуляционной канатной системе или движение движущегося каната 3 в канатной системе, но не происходит разматывание и наматывание подъемного или тягового каната. В канатной тележке 7d, блокированной на несущем канате 1b, реализуется обратный ход барабана 6d, происходит наматывание подъемного или тягового каната 5d. Таким образом, согласно изобретению осуществляется независимое одновременное управление барабанами 6a, 6b, 6c, 6d в системе канатных тележек, причем направление вращения или движения рабочего каната 3 в циркуляционной канатной системе не меняется или направление движения движущегося каната 3 в канатной системе не меняется.
Преимуществом способа независимого управления барабаном подъемного или тягового каната в каждой тележке в системе канатных тележек посредством рабочего каната или движущегося каната, который вращается или движется всегда в одном направлении, которое может быть любым в случае необходимости, является то, что этим способом обеспечится эффективная работа нескольких тележек одновременно.
В каждой тележке в системе канатных тележек возможно во время вращения или движения движущегося каната в одном направлении, которое может быть любым в случае необходимости, обеспеченить основной режим барабана, тормозной режим барабана и обратный ход барабана независимо по мере необходимости. Этим способом возможно опустить реверсивную систему в приводном агрегате для рабочего каната или не требуется изменять направление вращения или движения рабочего каната в циркуляционной канатной системе для обеспечения разматывания и наматывания подъемного или тягового каната на барабан в тележке.
Преимущество этого способа согласно изобретению в том, что движением рабочего каната или движением движущегося каната в канатной системе управляется разматывание и наматывание подъемного или тягового каната независимое во всех тележках на одной канатной дороге или нескольких канатных дорогах. Дальнейшее преимущество в том, что разматыванием каната с барабана в тележке позволяется одновременно активно высовывать свободный конец подъемного или тягового каната из тележки. Каждая тележка в системе канатных тележек имеет функцию активного высовывания свободного конца подъемного или тягового каната из тележки.
Преимущество этого способа согласно изобретению в том, что вращением или движением рабочего каната или движением движущегося каната в канатной системе управляется поднятие груза, подъем груза и опускание груза независимое во всех тележках на одной канатной дороге или нескольких канатных дорогах.
Каждая канатная тележка работает эффективно и независимо от других канатных тележек в системе канатных тележек. Значит, в каждой канатной тележке в системе канатных тележек эффективно по мере необходимости управляется направление вращения барабана, и независимое управление разматыванием и наматыванием подъемного или тягового каната, который на этом барабане намотан в направлении по мере необходимости.
Преимущество этого способа согласно изобретению в том, что этот способ может использоваться в случае необходимости управления несколькими канатными тележками на одной канатной дороге или нескольких канатных дорогах.Этот способ обоснован тоже при долгих канатных дорогах и ломанных канатных дорогах.
Изобретение возможно эффективно использовать для поднятия, подъема, опускания, приближения или транспортировки дерева, деревьев, строительного материала или другого материала или грузов вообще. Изобретение возможно эффективно использовать в области лесных канатных дорог, или в области других канатных устройств, или в области подъемных устройств вообще.
Из уведенного вытекает, что способ независимого одновременного управления барабаном подъемного или тягового каната в каждой тележке в системе канатных тележек посредством рабочего каната или движущегося каната, который вращается или двигается в одном направлении, которое может быть любым в случае необходимости, имеет широкое применение. Возможности применения этого способа не ограничивают диапазон использования объекта изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Дорога с замкнутым тяговым канатом | 1988 |
|
SU1521640A2 |
| Канатная дорога | 1987 |
|
SU1421578A1 |
| Устройство для удлинения транспортных средств с замкнутым тяговым канатом | 1986 |
|
SU1430551A1 |
| Кабель-кран | 1983 |
|
SU1133222A1 |
| Транспортная система | 1990 |
|
SU1729859A1 |
| УСТРОЙСТВО МАНЕВРОВОЕ | 2007 |
|
RU2357885C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 2010 |
|
RU2442711C1 |
| Устройство для удлинения транспортных средств с замкнутым тяговым канатом | 1984 |
|
SU1310525A1 |
| Реверсивный тележечный конвейер | 1988 |
|
SU1632889A1 |
| СНАБЖЕННАЯ БАРАБАННОЙ ЛЕБЕДКОЙ ПОДЪЕМНО-ТРАНСПОРТНАЯ УСТАНОВКА С УСТРОЙСТВОМ КОНТРОЛЯ КАНАТА | 2016 |
|
RU2719509C1 |
Изобретение относится к канатной дороге, к способу независимого управления барабаном подъемного или тягового каната в каждой канатной тележке в системе канатных тележек. Согласно способу канатные тележки приводятся в движение рабочим канатом или движущимся канатом, который вращается или движется по любому направлению таким образом, что в каждой канатной тележке барабан независимо одновременно управляется таким образом, что работа каждой канатной тележки не зависит от других канатных тележек в системе канатных тележек. В результате расширяются функциональные возможности канатной дороги. 9 з.п. ф-лы, 3 ил.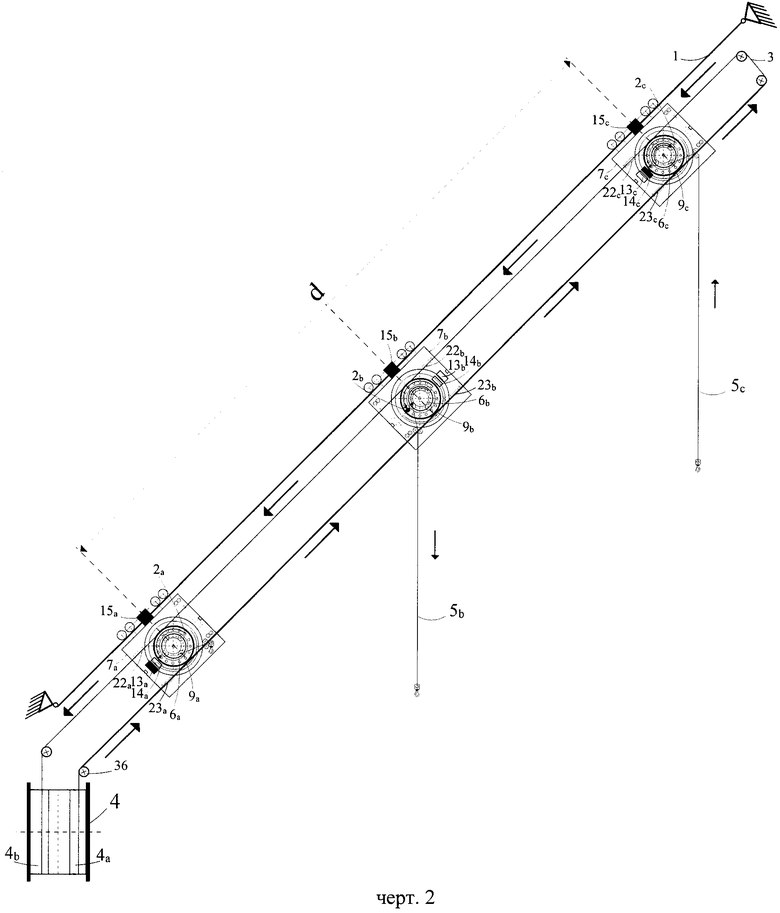
1. Способ независимого одновременного управления барабанами в системе канатных тележек, отличающийся тем, что вращением по часовой стрелке или против часовой стрелки или движением рабочего каната (3) или движением движущегося каната, который движется по любому направлению, обеспечивается привод или управление несколькими тележками одновременно таким образом, что барабан (6) для разматывания и наматывания каната (5) управляется самостоятельно независимо в каждой тележке в системе тележек.
2. Способ независимого одновременного управления барабанами в системе канатных тележек согласно пункту 1, отличающийся тем, что вращением или движением рабочего каната (3) или движением движущегося каната управляется разматывание каната (5) с барабана (6) и наматывание каната (5) на барабан (6) независимо во всех тележках на одной канатной дороге или нескольких канатных дорогах.
3. Способ независимого одновременного управления барабанами в системе канатных тележек согласно п. 1 или 2, отличающийся тем, что вращением или движением рабочего каната (3) или движением движущегося каната управляется вытаскивание груза и/или подъем груза или опускание груза независимо во всех тележках на одной канатной дороге или нескольких канатных дорогах.
4. Способ независимого одновременного управления барабанами в системе канатных тележек согласно п. 1 или 2, отличающийся тем, что вращением или движением рабочего каната (3) или движением движущегося каната в одном любом направлении независимо управляется разматывание каната (5) с барабана (6) и наматывание каната (5) на барабан (6) в нескольких тележках или во всех тележках в системе тележек таким образом, что нет необходимости менять направление вращения или направление движения рабочего каната (3) или движение движущегося каната.
5. Способ независимого одновременного управления барабанами в системе канатных тележек согласно п. 1, отличающийся тем, что барабан (6) для разматывания и наматывания каната (5) управляется самостоятельно независимо во всех тележках в системе тележек движением движущегося каната, проходящего через несколько тележек, которые движутся таким образом, что с одного наматывающего устройства движущийся канат разматывается и на второе наматывающее устройство движущийся канат наматывается или наоборот.
6. Способ независимого одновременного управления барабанами в системе канатных тележек согласно п. 1, отличающийся тем, что барабан (6) для разматывания и наматывания каната (5) управляется самостоятельно независимо в каждой тележке в системе тележек вращением или движением рабочего каната (3), который двигается в циркуляционной канатной системе.
7. Способ независимого одновременного управления барабанами в системе канатных тележек согласно п. 1, отличающийся тем, что
a) вращением или движением рабочего каната (3) или движущегося каната осуществляется привод барабанов (6) во всех тележках, которыми рабочий канат (3) или движущийся канат проходит,
b) в каждой тележке вращением или движением рабочего каната (3) или движением движущегося каната осуществляется вращение канатного шкива (9) в направлении вращения или движения рабочего каната (3) или движущегося каната,
c) в каждой тележке вращением канатного шкива (9) осуществляется основной режим барабана (6), тормозной режим барабана (6) и обратный ход барабана (6) независимо от других тележек,
d) основным режимом барабана (6), тормозным режимом барабана (6) и обратным ходом барабана (6) в каждой тележке в циркуляционной канатной системе отдельно управляется разматывание каната (5) с барабана (6) и наматывание каната (5) на барабан (6).
8. Способ независимого одновременного управления барабанами в системе канатных тележек согласно п. 7, отличающийся тем, что
a) канатный шкив (9) в тележке или тележках приводится в движение посредством рабочего каната (3) или движущегося каната в том же направлении, что и направление вращения или движения рабочего каната (3) в циркуляционной канатной системе или движущегося каната в канатной системе,
b) заблокированием муфты (2), разблокированием тормоза (13), разблокированием тормоза (14) в тележке или в тележках крутящий момент передается в том же направлении с канатного шкива (9) на барабан (6),
c) канатный шкив (9) вращается в том же направлении, что и направление вращения барабана (6), тем обеспечится основной режим барабана (6).
9. Способ независимого одновременного управления барабанами в системе канатных тележек согласно п. 7, отличающийся тем, что
a) канатный шкив (9) в тележке или тележках приводится в движение посредством рабочего каната (3) или движущегося каната в том же направлении, что и нарпавление вращения или движения рабочего каната (3) в циркуляционной канатной системе или движущего каната в канатной системе,
b) разблокированием муфты (2), разблокированием тормоза (14), заблокированием тормоза (13) обеспечится вращательное движение рабочего каната (3) в циркуляционной канатной системе или движение движущегося каната в канатной системе, причем крутящий момент с канатного шкива (9) не передается на барабан (6),
c) канатный шкив (9) вращается в том же направлении, что и направление вращения или движения рабочего каната (3) или движущегося каната, и барабан (6) заблокирован без движения, чем обеспечится тормозной режим барабана (6).
10. Способ независимого одновременного управления барабанами в системе канатных тележек согласно п. 7, отличающийся тем, что
a) канатный шкив (9) в тележке или тележках приводится в движение посредством рабочего каната (3) или движущегося каната в том же направлении, что и направление вращения или движения рабочего каната (3) в циркуляционной канатной системе или движущегося каната в канатной системе,
b) заблокированием тормоза (14), разблокированием муфты (2), разблокированием тормоза (13) в тележке или в тележках создается обратный ход барабана, причем крутящий момент с канатного шкива (9) передается против направления вращения на барабан (6),
c) канатный шкив (9) вращается против направления вращения барабана (6), чем обеспечится обратный ход барабана (6).
| 0 |
|
SU278797A1 | |
| ЩЕЛЕВОЙ БИТЕР МОЛОТИЛЬНО-СЕПАРИРУЮЩЕГО УСТРОЙСТВА | 2015 |
|
RU2601228C1 |
| US 3079008 A, 26.02.1963 | |||
| СУДОВОЙ КРАН | 2002 |
|
RU2241633C2 |
| Электропривод подвесной канатной дороги | 1974 |
|
SU499160A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |

