Изобретение относится к ручным орудиям труда для обработки почвы, преимущественно к садово-огородному инвентарю для рыхления почвы и борьбы с сорняками под плодово-ягодными кустарниками.
Известна конструкция ручного садово-огородного рыхлителя, включающая в себя штангу с подвижной рукояткой-воротком, насаженной на штангу с возможностью перемещения по ее длине, фиксатор их взаимного положения, нажимную рейку с зубьями для рыхления почвы, закрепленную на штанге (Патент RU №2654726, МПК А01В 1/00, 21.09.2017 г.). Недостатком данного устройства является его ориентированность на обработку почвы в положении, близком к вертикальному. Это ограничивает возможность работы под наклоном к поверхности почвы, что желательно при рыхлении почвы под кустарниками, ветви которых мешают подойти вплотную к основаниям стеблей.
Известен ручной культиватор, содержащий основную ручку, на одном конце которой установлен рабочий орган, представляющий собой основание, на котором закреплены зубцы в одной плоскости параллельно основной ручке, ось симметрии рабочего органа совпадает с осью основной ручки, а его основание ориентировано в боковом направлении, а также поворотную рукоятку, которая установлена на основной ручке с возможностью регулирования ее положения вдоль оси основной ручки и ориентирована также в боковом направлении (Патент US 5435396А, МПК А01В 1/06, 25.07.1995). Данное устройство предназначено для ограниченного возделывания и рыхления почвы без чрезмерного нарушения почвенного покрова. Это достигается благодаря соосному расположению рабочего органа с основной ручкой, что при расположении культиватора без существенного наклона к поверхности почвы позволяет осуществлять рыхление почвы практически без «взламывания» ее верхнего слоя. Для этого поворотной ручке придается возвратно-поступательное движение. Однако подобной щадящей обработки почвы бывает не всегда достаточно и, кроме того, обработка почвы путем ее «сминания» уступает по энергоэффективности способу обработки путем ее «взламывания», которое имеет место при работе культиватором под острым углом к поверхности почвы. Расположение поворотной рукоятки в плоскости рабочего органа ограничивает рабочий угол наклона культиватора к поверхности почвы при вертикальном расположении туловища оператора, поэтому данная конструкция также преимущественно используется для работы в положении близком к вертикальному.
Известно также ручное орудие для обработки почвы со сменными рабочими органами, включающее черенок с заостренным концом, который в верхней части дополнительно снабжен поперечиной с установленными на ее концах рукоятками, а в нижней части - средством соединения со сменным рабочим органом, выполненным в виде дополнительного черенка с укрепленными на его боковой стороне вилами, выполненными в виде плоских изогнутых зубьев, с одной стороны соединенных между собой (Патент RU на полезную модель №61983, МПК A01D 11/02, 27.03.2007 г.). В данной конструкции заглубление зубцов вил в необработанную почву перед поворотом черенка существенно затруднено, поскольку зубцы располагаются поперек черенка, а предварительное заглубление в землю осуществляется перемещением орудия вдоль оси черенка. Кроме того, поворот рассматриваемого ручного орудия на весу в вертикальной плоскости возможен лишь за счет усилий кистей рук оператора, приложенных к рукояткам на поперечине, что также затрудняет работу под наклоном к поверхности почвы в приствольной области кустов.
Известен ручной культиватор, содержащий рабочий орган, включающий заостренные зубцы, объединенные в верхней части общей планкой, на которой со смещением от центральной оси закреплена вертикальная стойка, причем один из зубцов выполнен в виде прямого упора и соединен с коротким от стойки концом планки, а верхняя часть вертикальной стойки соединена с поворотной рукояткой дугообразной формы, концы которой образуют ручки, причем одна из них расположена в лицевом полупространстве относительно присоединенной плоскости симметрии зубцов рабочего органа, а другая - в тыльном полупространстве (Патент RU на полезную модель №113109, МПК А01В 1/06, 10.02.2012 г.).
Данная конструкция выбрана в качестве прототипа как наиболее близкая к заявленному устройству по технической сущности и достигаемому результату. Расположение зубцов в рассмотренной конструкции близкое к параллельному относительно стойки позволяет облегчить их заглубление в почву при перемещении культиватора в направлении оси стойки. Поворот рабочего органа относительно упорного зубца после углубления зубцов в почву под острым углом к ее поверхности обеспечивает более легкое рыхление грунта, поскольку он в этом случае испытывает деформации на растяжение, а не на сжатие. Упорный зубец при этом выполняет роль опоры, которая действует на почву в направлении ее сжатия («сминания») и поэтому грунт здесь подвергается существенно меньшим деформациям, чем в области рабочих зубцов, где почва рабочими зубцами поднимается вверх («взламывается»). Расположение левой ручки поворотной рукоятки в лицевом полупространстве относительно присоединенной плоскости симметрии (термин закреплен ГОСТ 31254-2004. Основные нормы взаимозаменяемости. Геометрические элементы. Общие термины и определения) зубцов рабочего органа, а правой ручки- в тыльном полупространстве (фиг. 3 в описании прототипа) позволяет разнести руки оператора в направлении нормали к указанной выше плоскости, что несколько снижает нагрузку на кисти рук при удержании культиватора под углом к почве в вертикальной плоскости.
Вместе с тем рассматриваемое устройство имеет и существенные недостатки. Расположение поворотной рукоятки, и соответственно ручек, в одной плоскости, перпендикулярной оси вертикальной стойки, не обеспечивает существенного снижения вращающих усилий на кисти рук оператора под действием силы тяжести культиватора при его расположении под острым углом к почве, либо под действием динамических усилий, действующих на культиватор при изменении его положения в пространстве, например, при повороте в горизонтальном направлении. В результате требуется приложение значительных усилий к ручкам культиватора со стороны кистей оператора для ориентирования орудия в требуемом положении перед заглублением зубцов рабочего органа в почву, что затрудняет работу с рассматриваемым культиватором при обработке почвы под кустами в течение достаточно длительного времени. Снижение данных усилий путем уменьшения веса орудия и, соответственно, его инерционных масс не всегда оправдано как с экономической точки зрения (в случае использовании легких, но дорогостоящих материалов), так и с точки зрения достижения требуемых усилий на рабочий орган при заглублении зубцов в грунт. Это связано с тем, что при работе под кустами, как правило, рабочий орган удален от ступней ног оператора настолько, что невозможно свободно достать ногой до рабочего органа и осуществить его заглубление за счет веса оператора. В этом случае заглубление зубцов рабочего органа в почву может быть осуществлено за счет импульса массы культиватора, который тем больше, чем больше масса орудия и скорость, которую ему придает оператор в требуемом направлении (вдоль оси стойки). Поэтому для работы под кустами, в ряде случаев, целесообразно даже несколько увеличивать вес орудия для повышения ударной силы, как это делается, например, в конструкциях ледорубов. При этом повышается производительность процесса рыхления почвы, поскольку заглубление зубцов рабочего органа в почву благодаря импульсу масс культиватора происходит быстрее, чем их заглубление ногой оператора. Кроме того, выполнение обеих ручек прототипа с поворотными рукоятками приблизительно одинаковой длины (в прототипе длина поворотной рукоятке может быть ориентировочно определена как односторонняя длина поворотной рукоятки относительно стойки за вычетом средней ширины кисти оператора) увеличивает значение минимального угла наклона стойки культиватора относительно почвы, что уменьшает дальность, на которую может быть обработан грунт от места стояния оператора без его наклона в области поясницы в сторону основания куста. Это, в свою очередь, снижает удобство пользования культиватором.
Задачей изобретения является уменьшение угла наклона ручного культиватора относительно почвы при ее обработке без чрезмерного наклона туловища оператора и, соответственно, возрастание дальности обработки почвы, т.е. расстояния от ступней оператора до наиболее удаленной обрабатываемой зоны, увеличение производительности обработки почвы под кустами, а также повышение удобства пользования ручным культиватором благодаря снижению усилий, в том числе вращающих, на кисти рук оператора.
Поставленная задача достигается тем, что ручной культиватор, также как в прототипе, содержит рабочий орган с по меньшей мере двумя зубцами, соединенный со стойкой, и две ручки, закрепленные на стойке, по крайней мере одна из которых размещена на поворотной рукоятке и расположена в лицевом полупространстве относительно присоединенной плоскости симметрии зубцов рабочего органа.
Согласно изобретению передняя ручка, размещенная на поворотной рукоятке и расположенная в лицевом полупространстве относительно присоединенной плоскости симметрии зубцов рабочего органа, смещена относительно задней ручки вдоль оси стойки в направлении рабочего органа на расстояние S, величина которого удовлетворяет двойному неравенству
0,13⋅L≤S≤0,48⋅(L-Z),
где L - общая длина ручного культиватора, м; Z - максимальная длина зубцов рабочего органа, м,
причем середина передней ручки отстоит от присоединенной плоскости симметрии зубцов рабочего органа на расстояние δ, величина которого связана с параметром S выражением
δ≥S⋅[5⋅(S*-0,24)2-0,4⋅(S*-0,24)+0,466],
где S*=S/(L-Z) - относительная величина параметра S.
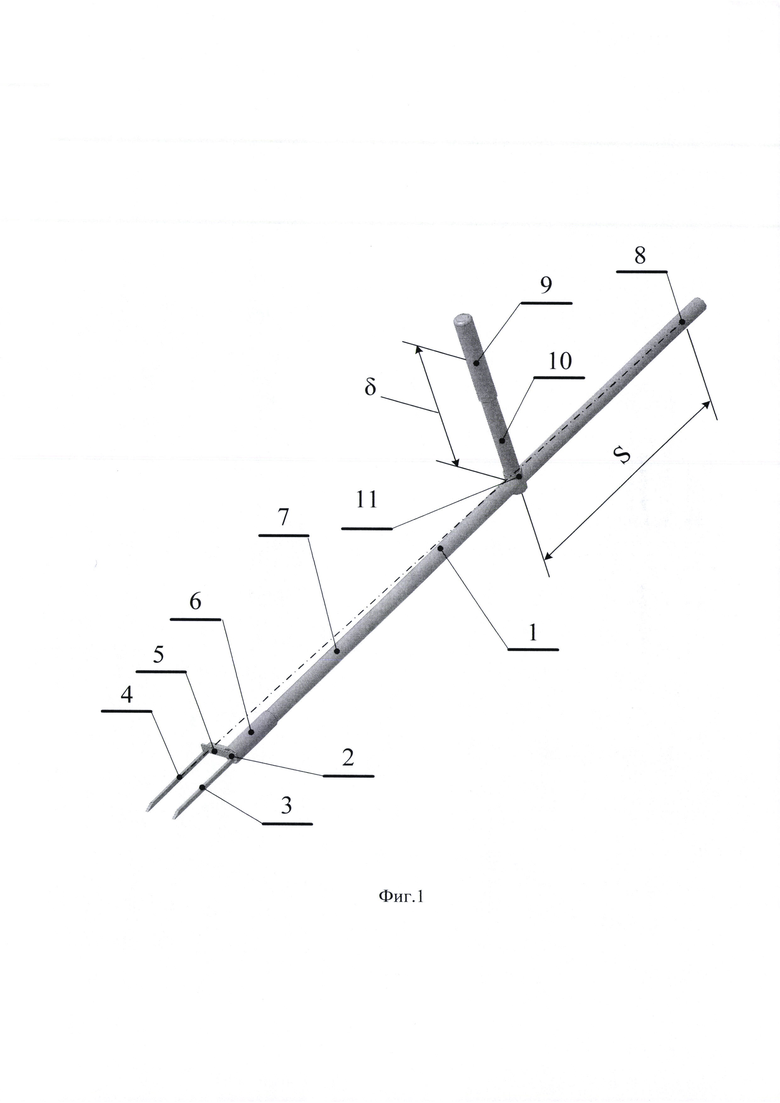
Сущность предлагаемого изобретения, во-первых, состоит в том, что для компенсации моментов сил, образующихся на культиваторе за счет его веса или инерционных сил, создается рычаг, плечо которого расположено вдоль оси стойки. Для этого, например, середина передней ручки 9 с поворотной рукояткой 10 культиватора 1, располагается ближе к рабочему органу 2 на величину S вдоль оси стойки 7 относительно середины задней ручки 8 без поворотной рукоятки (фиг. 1). При этом целесообразно переднюю ручку 9 не просто расположить в лицевом полупространстве культиватора (определяется как полупространство, лежащее за присоединенной плоскостью симметрии зубцов 3, 4 рабочего органа 2, и обращенное к предполагаемому месту обработки поверхности почвы), а в плоскости, нормальной к присоединенной плоскости симметрии зубцов 3, 4 рабочего органа 2, как это осуществлено в варианте конструкции культиватора на фиг. 1. В этом случае рука оператора, удерживающая переднюю ручку 9 в исходном состоянии, в основном компенсирует лишь вес культиватора 1 без значительных вращательных усилий на кисть, а рука, удерживающая заднюю ручку 8, создает толкающее усилие для направления рабочего органа 2 в требуемое положение по вертикали. Такое распределение усилий на руки оператора является эргономичным, что позволяет оператору без больших усилий на кисти рук удерживать культиватор 1 в подобном наклоненном к горизонту положении и осуществлять его перемещения вдоль оси стойки 7 для заглубления зубцов 3, 4 в почву за счет ударной силы. После заглубления зубцов 3, 4 в грунт, оператором создается основной вращающий момент на передней ручке 9 путем перемещения руки в сторону и дополнительный момент на задней ручке 8 за счет вращающего усилия кисти, в результате чего почва разрыхляется.
Таким образом, благодаря образованию рычага с плечом S на стойке 7 становится возможным с меньшими усилиями управлять положением культиватора в пространстве, в том числе при его перемещениях как в вертикальной, так и в горизонтальной плоскостях.
Минимальная величина смещения S между ручками 8 и 9 вдоль оси стойки 7 определяется из следующих соображений. Поскольку величина S на практике меньше половины длины ручного культиватора, то при его удержании только за переднюю ручку 9 будет происходить поворот культиватора вокруг точки удержания таким образом, что рабочий орган 2 будет опускаться под действием силы тяжести культиватора, а задняя ручка 8, наоборот, будет подниматься. Для удержания культиватора 1 в положении, когда, например, стойка 7 находится в горизонтальной плоскости, требуется приложение к задней ручке 8 усилия, направленного вниз. При этом данное усилие будет передаваться и на руку, удерживающую переднюю ручку 9. Увеличение нагрузки на данную руку будет тем больше, чем большее усилие требуется на задней ручке 8 для удержания культиватора в горизонтальном положении, которое, в свою очередь, обратно пропорционально величине S. В общем случае относительная величина усилия на удерживающей культиватор за переднюю ручку 9 руке определяется зависимостью

где Р1 - усилие на удерживающей руке (передней ручке 9) без дополнительного усилия на задней ручке 8 (рано весу культиватора), Н; Р2 - результирующее усилие на удерживающей руке (передней ручке 9) при наличии дополнительного усилия на задней ручке 8, Н; G - смещение центра масс культиватора относительно середины передней ручки 9 вдоль стойки 7, м; S - взаимное смещение ручек 8 и 9 вдоль стойки 7, м.
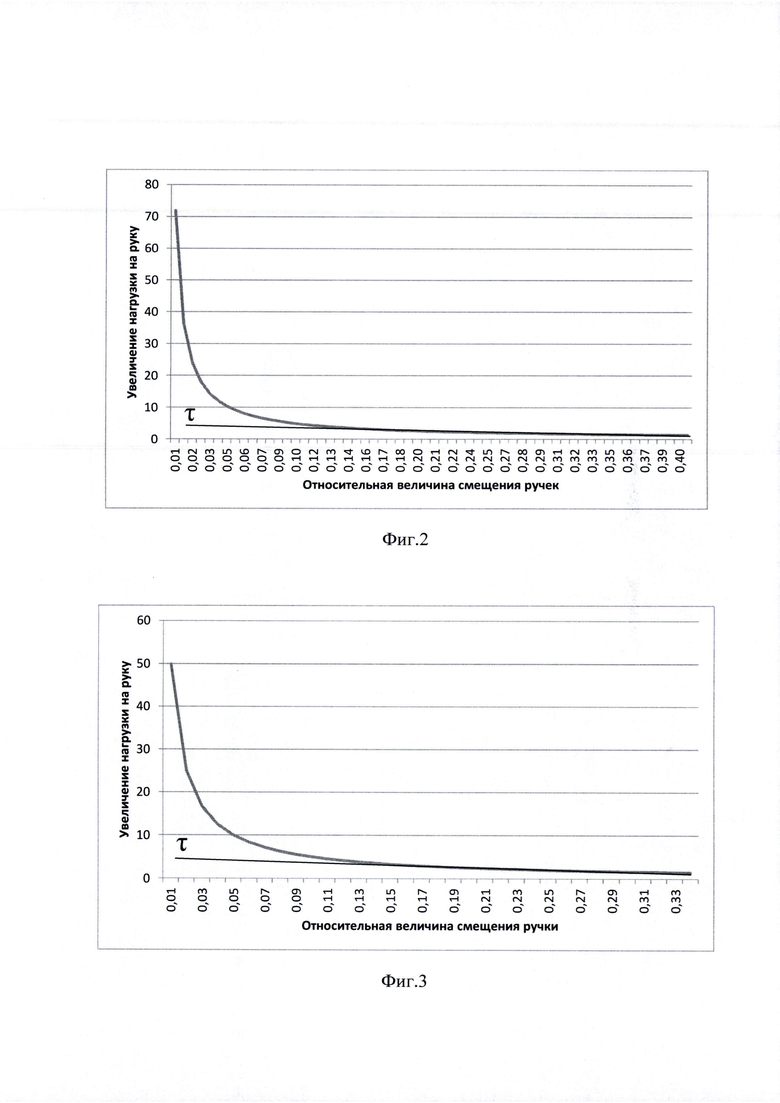
Из выражения (1) следует, что чем меньше величина S, тем в большей степени дополнительно нагружается удерживающая культиватор 1 рука (за переднюю ручку 9). Характерная зависимость увеличения нагрузки на удерживающую руку для одного из вариантов выполнения культиватора представлена на фиг. 2. Из данной зависимости видно, что при уменьшении величины S относительно общей длины (L) культиватора 1 (S/L-относительная величина смещения ручек 8 и 9) до значения, равного ориентировочно 0,13, происходит незначительное нарастание нагрузки на удерживающую руку почти по прямой τ, а затем происходит интенсивное увеличение нагрузки на удерживающую руку, которая может в десятки раз превысить вес культиватора.
Аналогичная зависимость имеет место при динамических воздействиях на ручной культиватор, например, при его повороте в горизонтальной плоскости вокруг середины задней ручки 8 (фиг. 3). В этом случае усилие, прикладываемое к стойке 7 на расстоянии S от задней ручки 8, и усилие, которое необходимо приложить в средней части общей длины культиватора 1 для его поворота, будут соотноситься следующим образом

где F(S) - усилие, приложенное к стойке 7 на расстоянии S от середины задней ручки 8, Н; F(0,5⋅L) - усилие, приложенное к стойке 7 на расстоянии 0,5⋅L от середины задней ручки 8, Н.
Здесь также наблюдается увеличение усилия, которое должна передать удерживающая рука через переднюю ручку 9 на стойку 7 для поворота культиватора в горизонтальной плоскости с заданным угловым ускорением, при уменьшении расстояния S, особенно если оно становится меньше величины порядка 0,13⋅L.
Следовательно, нежелательно уменьшение расстояния S ниже значения 0,13⋅L, поскольку в этом случае нагрузки на удерживающую руку могут возрастать до неприемлемых величин.
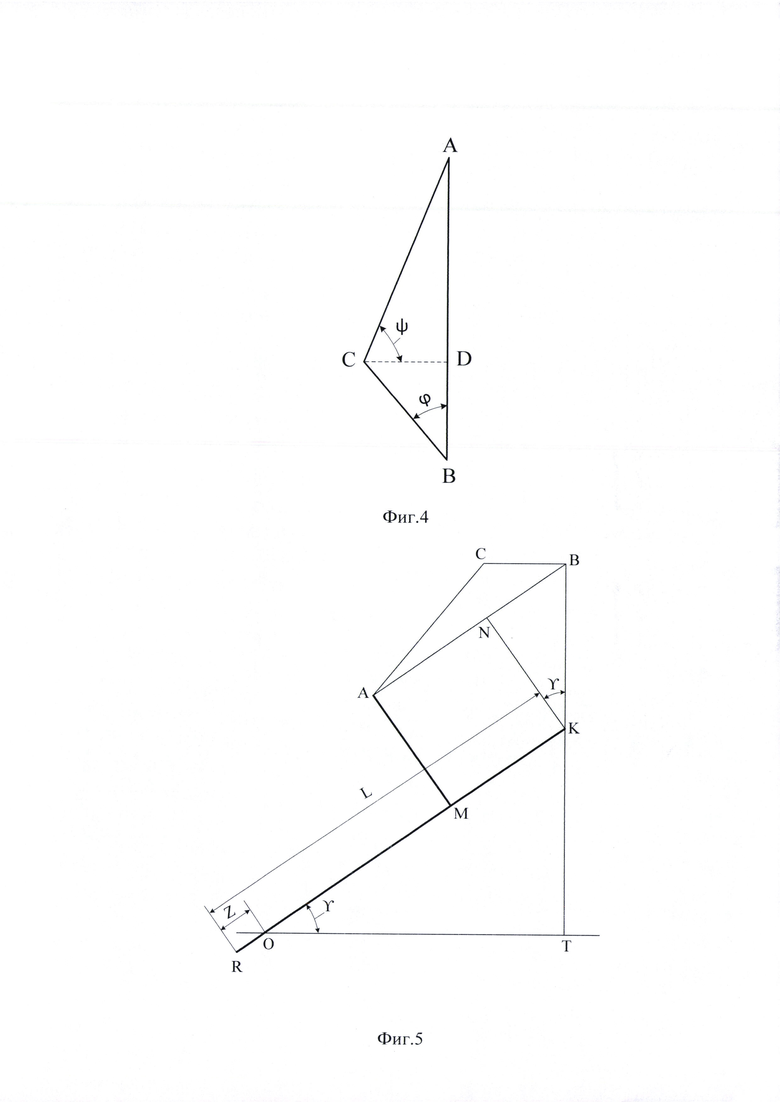
Максимальное расстояние S можно ориентировочно определить исходя из пропорций тела человека (Электронный ресурс. URL: https://pedtehno.ru/content/proporcii-v-tele-cheloveka. Дата обращения: 01.11.2019). Для этого рассмотрим треугольник на фиг. 4, образованный в горизонтальной плоскости линией плеч праворукого оператора (СВ), линией его вытянутой левой руки (СА) и проекцией направления перемещения культиватора на горизонтальную плоскость (АВ). Величина АВ может быть найдена из выражения

где Н - рост человека, м.
Поскольку угол ϕ между линией плеч оператора и проекцией направления перемещения культиватора на горизонтальную плоскость в наиболее эргономичном положении составляет от 35° до 45°, то максимальная величина отрезка АВ между правым плечом и кистью вытянутой левой руки (с учетом разброса длины рук около шести процентов от среднего значения) составит порядка 0,604⋅Н (при угле ϕ, равном 35°).
Рассмотрим случай, когда ручной культиватор 1 на фиг. 1 заглублен в грунт на всю длину зубцов 3, 4 под углом γ к поверхности почвы (фиг. 5). Здесь отрезок ОК соответствует длине стойки 7 от середины задней ручки 8 до зубцов 3, 4 (при условии совпадения оси вращения культиватора с осью стойки 7), а отрезок AM равен расстоянию от середины передней ручки 9 до оси стойки 7. Учитывая, что минимальный угол наклона стойки 7 культиватора (ОК) к поверхности почвы (γ) при заглубленных зубцах 3, 4 (OR) рабочего органа 2 может быть достигнут при положении правой руки в нижней точке на линии тела (К), а максимальная величина S при вертикальном положении туловища оператора имеет место в случае размещения линии АВ вдоль стойки 7 культиватора (ОК), то расстояние S между ручками 8, 9 культиватора 1 вдоль оси его стойки 7 будет в этом случае определяться отрезком КМ на фиг. 5. Принимая во внимание, что отрезок ВК не что иное, как длина правой руки (равна отрезку СА на фиг. 4), можно определить максимальную величину S при заданном угле наклона культиватора γ (с учетом принятой величины разброса длины рук):

Из выражения (4) следует, что максимальная величина S может быть получена при минимальном угле наклона культиватора γ. Минимальную величину угла γ на практике следует ограничить углом порядка 35°, поскольку длина стойки 7 культиватора 1 (соответствует отрезку ОК) при данном угле достигает около 1,57 м при росте оператора 1,8 м, если принять отрезок КТ (от тазобедренного сустава до уровня почвы) равным половине роста оператора. Полная длина культиватора L при длине зубцов рабочего органа Z, равной около 0,18 м, в этом случае составит 1,75 м. Дальнейшее увеличение длины культиватора может сделать неудобным обращение с ним при углах наклона культиватора, превышающих рассмотренное минимальное значение. При минимальном угле наклона культиватора в 35° максимальная величина S будет равна порядка 0,36⋅Н в условиях вертикального расположения туловища оператора. Если туловище оператора будет наклонено в направлении рабочего органа на приемлемый угол (около 10°) от вертикальной линии (относительно точки К на фиг. 5), то, как показывают расчеты, максимальная величина S возрастает до 0,42⋅Н.
В свою очередь, из фиг. 5 следует, что для γ=35° рост оператора связан с длиной стойки 7 культиватора (равной L-Z) выражением

Соответственно максимальная величина S, выраженная через размеры культиватора, равна

Дальность обработки почвы от ног оператора (отрезок ОТ) в рассмотренном случае достигает порядка 1,29 м. При увеличении угла наклона культиватора γ дальность обработки почвы будет снижаться по сравнению с рассмотренным случаем.
Следовательно, смещение передней ручки 9 на величину S вдоль стойки 7 культиватора 1, удовлетворяющее условию 0,13⋅L≤S≤0,48⋅(L-Z), и ее размещение на поворотном рычаге 10 в лицевом полупространстве при одновременной минимизации длины поворотного рычага у задней ручки 8 (либо его направление в лицевое полупространство, как это будет показано далее) обеспечивает возможность рыхления почвы при минимальных углах наклона культиватора 1 и, соответственно, при максимальной дальности от места расположения оператора без чрезмерного наклона корпуса оператора, а также позволяет снизить усилия на кисти рук оператора в процессе обработки почвы.
Следует отметить, что приведенная выше расчетная схема исходила из положения о том, что линия зубцов (отрезок OR на фиг. 5) соосна со стойкой 7 культиватора (отрезок ОК), ось которой, в свою очередь, совпадает с осью вращения культиватора. Этому положению в полной мере соответствует конструкция культиватора 1 на фиг. 1. Здесь линии зубцов (отрезок OR) на фиг. 5 соответствует прямой опорный зуб 3, который закреплен на соединительной планке 5 практически соосно со стойкой 7 и задней ручкой 8. Поскольку зубцы 3, 4 рабочего органа 2 выполнены прямыми и расположены параллельно друг другу, то присоединенная плоскость симметрии зубцов 3, 4 рабочего органа 2 совпадает с плоскостью, в которой лежат средний линии зубцов 3, 4. В этой же плоскости находится и ось стойки 7 культиватора. Проекция данной плоскости на вертикальную плоскость, проходящую через переднюю ручку 9 с поворотной рукояткой 10 и стойку 7, отображается отрезком RK на фиг. 5.
В этой связи минимальная величина удаления середины передней ручки 9 от присоединенной плоскости симметрии зубцов 3, 4 рабочего органа 2 (параметр δ) также может быть определена на основе геометрии на фиг. 5 при условии, что туловище оператора наклонено на 10° в направлении рабочего органа, а линия вытянутой левой руки (СА) вращается относительно точки С. Параметр δmin будет при этом соответствовать минимальной величине расстояния от точки А до линии RK (отрезок AM на фиг. 5). Расчеты показывают, что в этом случае отношение параметра δmin к величине S при варьировании параметра S*(S*=S/(L-Z)) соответствует зависимости, представленной на фиг. 6. Данная кривая может быть аппроксимирована следующим выражением
δmin = S*[5*(S* - 0,24)2 - 0,4*(S* - 0,24) + 0,466], (7)
где S*=S/(L-Z) - относительная величина параметра S.
Удаление середины передней ручки 9 от присоединенной плоскости симметрии зубцов 3, 4 рабочего органа 2 на величину меньшую δmin приведет к необходимости наклонять туловище оператору на угол больше 10°, что неудобно при длительной работе с культиватором.
Кроме того, в общем случае приведенная на фиг. 6 функция представляет собой проекцию некой граничной поверхности на вертикальную плоскость культиватора 1 (соответствует плоскости на фиг. 5), ниже которой не должна опускаться середина передней ручки 9 культиватора, что является второй сущностной особенностью предлагаемой конструкции ручного культиватора.
Максимальное значение параметра δ выбирается в каждом конкретном случае из соображений достижения наилучших эргономических качеств культиватора, а также из условия, что в процессе работы с культиватором середина передней ручки 9 не пересечет граничную поверхность, проекция которой на центральную вертикальную плоскость культиватора определяется выражением (7). Так, например, при повороте передней ручки 9 культиватора 1 на фиг. 1 из вертикальной плоскости на рабочий угол (ориентировочно в диапазоне от 45° до 70°) вокруг стойки 7 и опорного зубца 3, наклоненных под углом 35° к поверхности почвы, середина передней ручки 9 не должна опуститься ниже уровня граничной поверхности, описанной уравнением (7) (в любом из ее поперечных сечений).
Таким образом, в предлагаемой конструкции ручного культиватора величина δ должна удовлетворять неравенству
δ ≥ S*[5*(S* - 0,24)2 - 0,4*(S* - 0,24) + 0,466], (8)
где S*=S/(L-Z) - относительная величина параметра S.
В этом случае будет создано необходимое условие для обеспечения минимального наклона корпуса оператора при работе с культиватором предлагаемой конструкции, обладающей эксплуатационными преимуществами, описанными выше.
На фиг. 1 представлен вариант ручного культиватора с передней ручкой «линейного» исполнения, расположенной в вертикальной плоскости, проходящей через ось стойки культиватора, свободная часть которой выполняет роль задней ручки, а рабочий орган выполнен в праворуком исполнении в виде двух зубцов квадратного сечения, закрепленных на планке, соединенной с тулейкой.
На фиг. 2 приведена зависимость относительного увеличения нагрузки на удерживающую руку от относительной величины смещения передней и задней ручек друг от друга вдоль оси стойки ручного культиватора при его удержании в горизонтальном положении.
На фиг. 3 показана зависимость относительного увеличения нагрузки на удерживающую руку от относительной величины смещения передней и задней ручек друг от друга вдоль оси стойки ручного культиватора при повороте культиватора с угловым ускорением вокруг середины задней ручки.
На фиг. 4 изображен треугольник, составленный из отрезков плеч, вытянутой руки и проекции линии перемещения культиватора на горизонтальную плоскость для праворукого оператора.
На фиг. 5 представлены геометрические соотношения ручного культиватора в вертикальной плоскости, проходящей через ось стойки ручного культиватора на фиг. 1, для случая ее расположения под минимальным углом к почве и при вертикальном положении туловища оператора.
На фиг. 6 показана расчетная зависимость отношения минимальной величины отклонения середины передней ручки культиватора от присоединенной плоскости симметрии зубцов рабочего органа к значению смещения передней ручки относительно задней ручки при варьировании величины данного смещения.
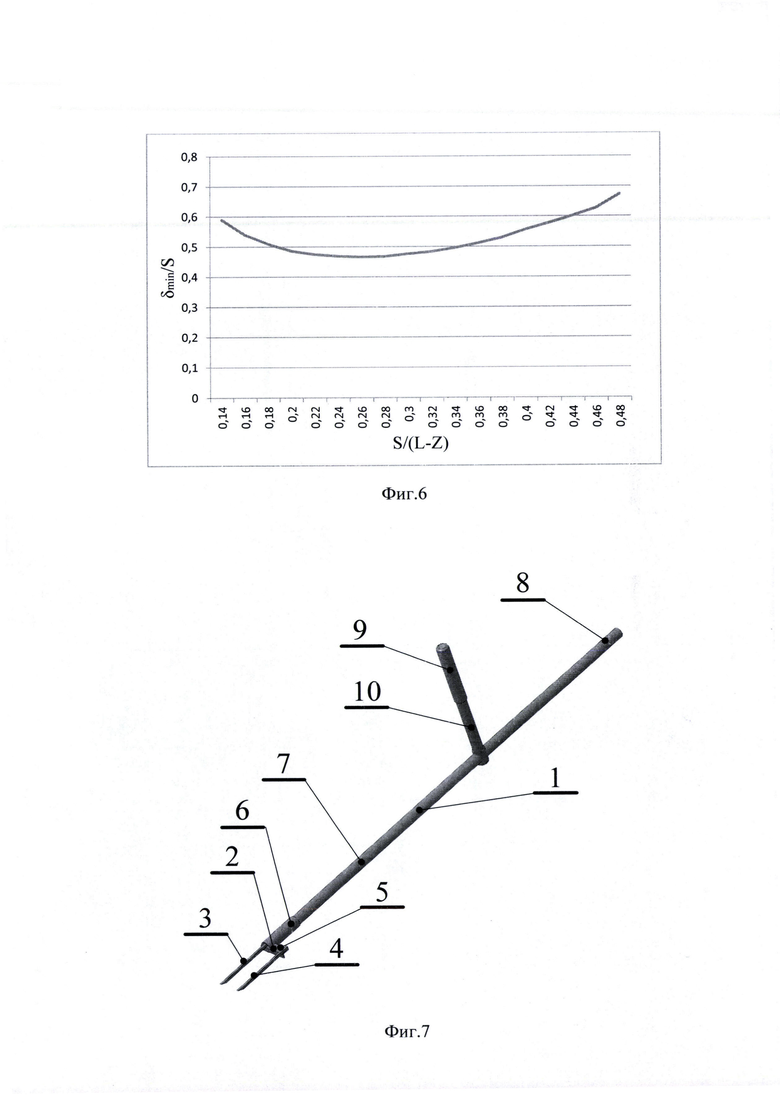
На фиг. 7 приведен вариант ручного культиватора, аналогичный конструкции на фиг. 1, но в леворуком исполнении.
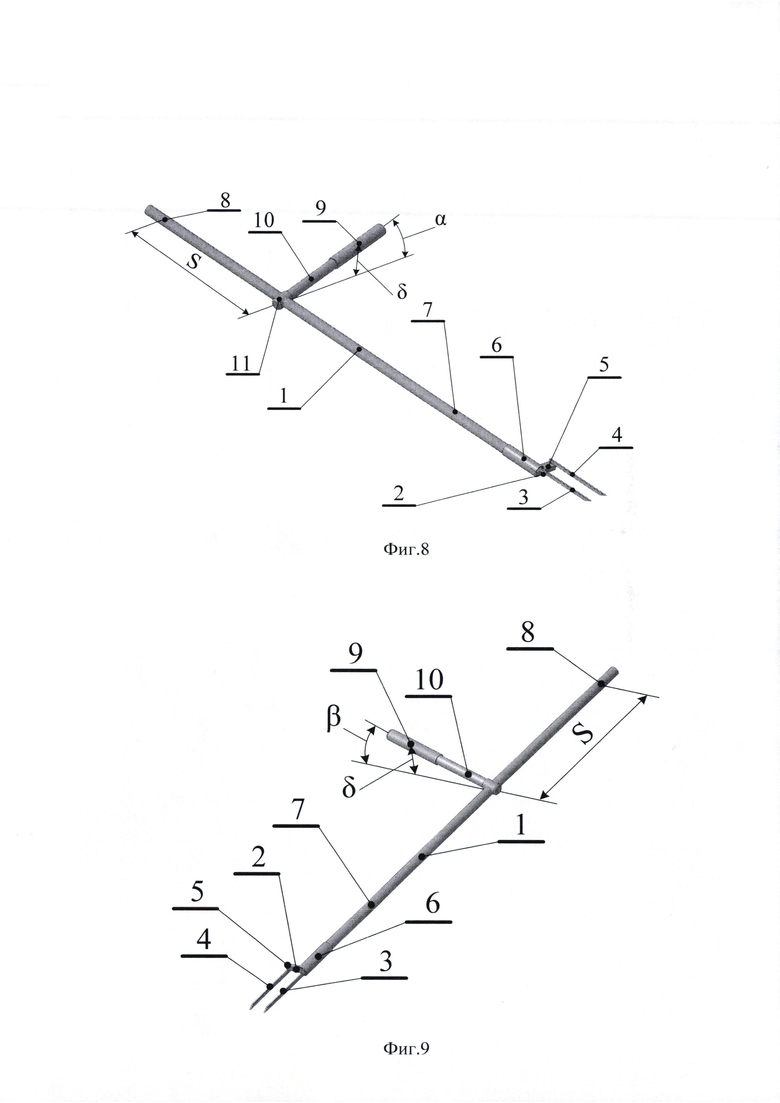
На фиг. 8 показан вариант ручного культиватора, аналогичный конструкции на фиг. 7, но для праворукого оператора с размещением передней ручки вне вертикальной плоскости, проходящей через ось стойки культиватора.
На фиг. 9 изображен вариант ручного культиватора, аналогичный конструкции на фиг. 1, но для леворукого оператора с размещением передней ручки вне вертикальной плоскости, проходящей через ось стойки культиватора.
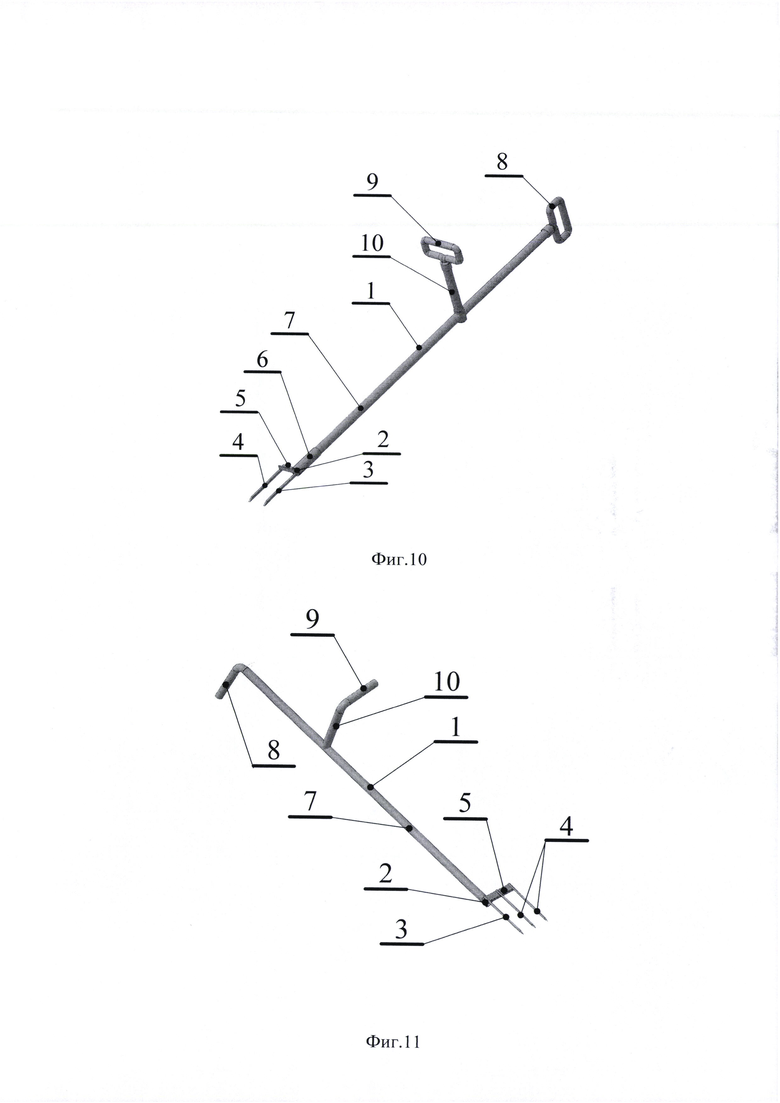
На фиг. 10 представлен вариант ручного культиватора, аналогичный конструкции на фиг. 1, но с ручками V-образного типа.
На фиг. 11 показана конструкция ручного культиватора праворукого исполнения с выполнением стойки, ручек и поворотной рукоятки из металлической трубы, с рабочим органом, включающим три зубца круглого сечения и с расположением середины передней ручки в вертикальной плоскости, проходящей через ось стойки.
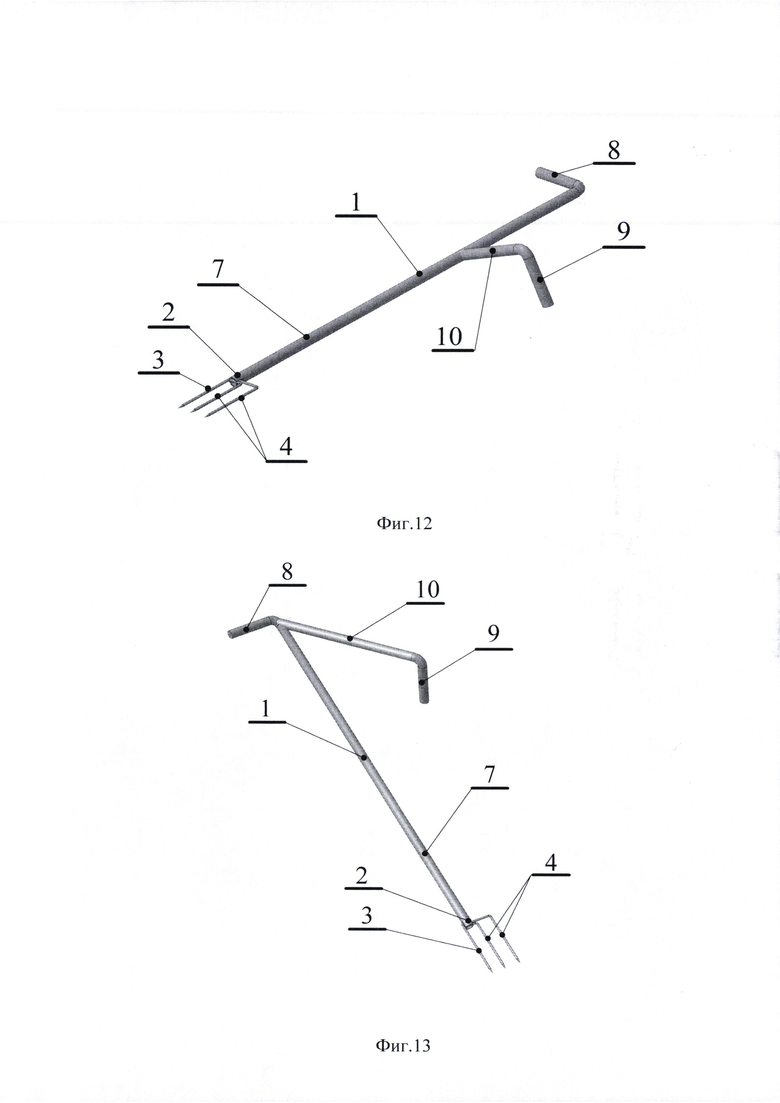
На фиг. 12 изображена конструкция праворукого исполнения с выполнением стойки, ручек и поворотной рукоятки из металлической трубки, с рабочим органом из трех зубцов круглого сечения без соединительной планки и с расположением передней ручки вне вертикальной плоскости, проходящей через ось стойки.
На фиг. 13 представлен ручной культиватор, аналогичный конструкции на фиг. 12, но с поворотной рукояткой передней ручки, расположенной под острым углом к стойке.
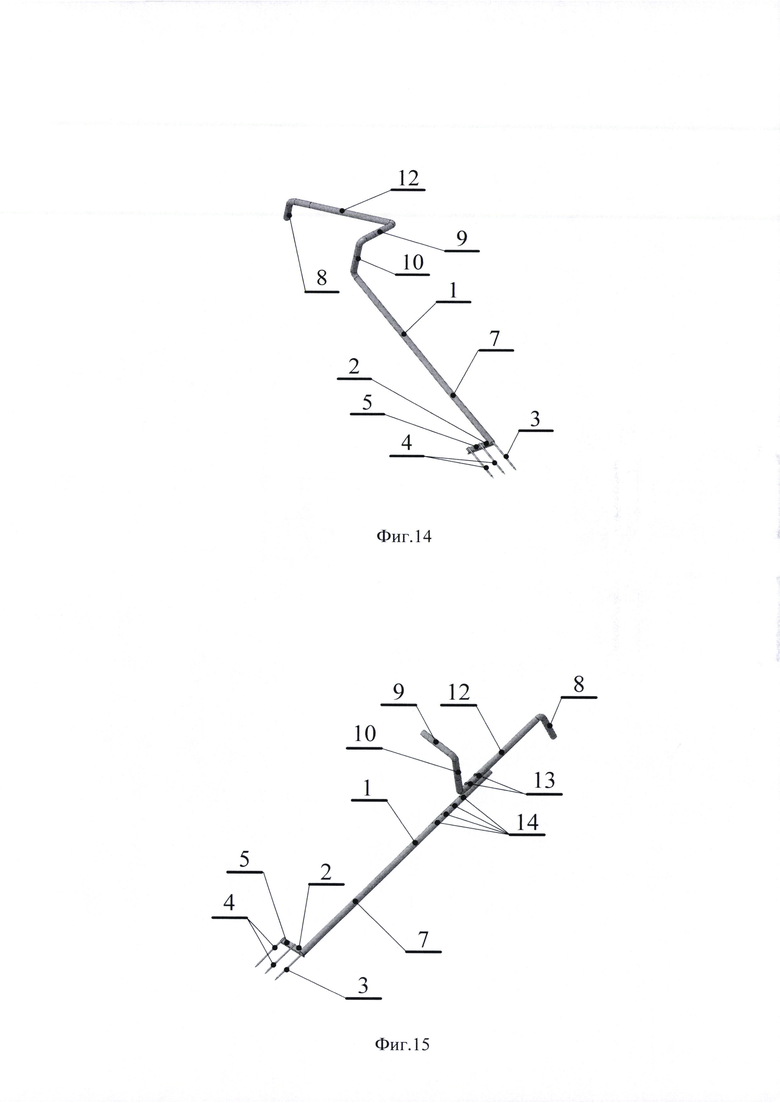
На фиг. 14 показан вариант конструкции ручного культиватора праворукого исполнения с выполнением стойки, ручек и поворотной рукоятки в виде изогнутой металлической трубы.
На фиг. 15 изображена сборная конструкция ручного культиватора с использованием металлических труб, с раздельной секцией ручек и с возможностью регулирования длины культиватора.
На фиг. 16 представлена сборная конструкция ручного культиватора, аналогичная культиватору на фиг. 15, но с расположением задней ручки в лицевом полупространстве.
На фиг. 17 показана конструкция с использованием металлических труб, с раздельными секциями передней и задней ручек и с применением телескопического соединения стойки с секцией задней ручки.
Сущность предлагаемой конструкции ручного культиватора и достигаемые с ее помощью результаты можно дополнительно пояснить на различных примерах ее реализации. В одном из вариантов (фиг. 1, 7, 8, 9, 10) ручной культиватор 1 состоит из рабочего органа 2, включающего опорный зубец 3 и рабочий зубец 4, которые выполнены прямыми из металлического прутка и имеют прямоугольное сечение. Свободные концы зубцов 3,4 заострены, а другие концы закреплены на Г-образной металлической соединительной планке 5 (например, с помощью сварки). Планка 5 в свою очередь закреплена в пазу тулейки 6, выполненной из металла в виде полого цилиндра, таким образом, что ось тулейки 6 смещена относительно центральной оси (оси симметрии) рабочего органа 2 в направлении оси опорного зубца 3. В отверстии тулейки 6 неподвижно закреплена стойка 7 в виде цилиндрического стержня. Концевая часть стойки 7 образует заднюю ручку 8. Передняя ручка 9 установлена на поворотной рукоятке 10, которая с помощью соединительного узла 11 соединена со стойкой 7 перпендикулярно последней. При этом смещение середины ручки 9 относительно середины ручки 8 вдоль оси стойки 7 равно величине S, а отклонение середины ручки 9 от присоединенной плоскости симметрии зубцов 3, 4 рабочего органа 2 представляет параметр δ. Поскольку ось стойки 7 лежит в присоединенной плоскости симметрии зубцов 3, 4 рабочего органа 2, то параметр δ соответствует в данной конструкции расстоянию от середины ручки 9 до оси стойки 7. Стойка 7 и поворотная рукоятка 10 могут быть выполнены, например, из дерева, а передняя ручка 9 и соединительный узел 11 - из пластмассы.
Праворукий оператор может работать с ручным культиватором на фиг. 1 следующим образом. Левой рукой он удерживает культиватор за переднюю ручку 9, а правой рукой - за заднюю ручку 8 в положении, когда стойка 7 располагается под углом к поверхности почвы, а острия зубцов 3, 4 удалены от нее на расстояние 15-20 см вдоль оси стойки 7. При этом вес культиватора 1 приходится на левую руку, а создание требуемого наклона культиватора 1 в вертикальной плоскости осуществляется правой рукой за счет усилия, направленного вниз. Лицевая часть рабочего органа 2 направляется в сторону обрабатываемой области грунта под кустом в горизонтальной плоскости путем создания вращающего усилия, преимущественно на передней ручке 9, относительно задней ручки 8. Затем оператор придает движение культиватору в направлении почвы вдоль оси стойки 7 и зубцы 3, 4 углубляются в грунт за счет импульса масс культиватора 1 и усилий оператора на ручках 8, 9. Продольное усилие при этом создается преимущественно правой рукой на задней ручке 8. После этого оператор, преимущественно левой рукой, создает вращающее усилие против часовой стрелки на передней ручке 9. Вращающий момент пары сил передается через стойку 7 на рабочий орган 2. В результате рабочий зубец 4 поднимается вверх взрыхляя почву, а опорный зубец 3, расположенный на оси стойки 7 (или близко к ней), перемещается вниз и выполняет роль опоры, передавая усилие на почву в направлении ее сжатия. Поскольку оси опорного зубца 3 и стойки 7 совпадают, то стойка 7 вместе с опорным зубцом 3 совершает, в основном, вращательное движение вокруг оси стойки 7, что способствует эффективной передаче вращательного момента на рабочий орган 2. Затем описанный рабочий цикл повторяется.
В качестве опорного зубца может быть выбран и зубец 4. В этом случае необходимо вращать переднюю ручку 9 по часовой стрелке (со стороны оператора), что может выполнить леворукий оператор. При этом культиватор 1 будет вращаться вокруг оси вращения, проходящей через середину зубца 4 и середину задней ручки 8, которая на фиг. 1 показана штрих-пунктирной линией. Однако в этом случае снижается энергетическая эффективность процесса рыхления. Для того, чтобы с культиватором на фиг. 1 мог эффективно работать леворукий оператор необходимо в качестве опорного зубца 3 выбирать не левый зубец (смотреть со стороны оператора), а правый зубец и ось стойки 7 следует смещать в его сторону относительно центральной оси рабочего органа 2 (фиг. 7). При этом оператор будет удерживать переднюю ручку 9 правой рукой и создавать вращающий момент по часовой стрелке (со стороны оператора). Ось вращения культиватора в данном варианте будет совпадать с осью стойки 7. Возможно также выполнение культиватора со сменяемым положением рабочего органа 2 для обеспечения работы одним культиватором как праворуким, так и леворуким операторами. С целью обеспечения универсальности культиватора для праворуких и леворуких операторов можно ось тулейки 6 совместить с осью симметрии рабочего органа 2 (расположена в плоскости рабочего органа 2 между зубцами 3 и 4). Однако энергетическая эффективность обработки почвы при этом будет несколько снижена как у праворукого, так у леворукого операторов.
В случае расположения передней ручки 9 вне вертикальной плоскости, проходящей через стойку 7 нормально к присоединенной плоскости симметрии зубцов 3, 4 рабочего органа 2, увеличивается нагрузка на кисть удерживающей руки, поскольку появляется вращающий момент на поворотной рукоятке 10 под действием веса культиватора 1, а также требуется изменить направление создаваемого момента на передней ручке 9 и направление смещения оси стойки 7 относительно оси симметрии рабочего органа 2.
Для праворукого оператора при расположении передней ручки 9 под углом α к присоединенной плоскости симметрии зубцов 3, 4 рабочего органа 2 (фиг. 8) смещение стойки 7 выполняется в сторону правого зубца (со стороны оператора), который становится опорным, а вращение передней ручки 9 осуществляется по часовой стрелке (со стороны оператора). При этом сочетание величины угла α и длины поворотной ручки 10 должны быть такими, чтобы параметр δ соответствовал условию неравенства (8).
Наоборот, для леворукого оператора при расположении передней ручки 9 под углом β к присоединенной плоскости симметрии зубцов 3, 4 рабочего органа 2 (фиг. 9) смещение стойки 7 выполняется в сторону левого зубца (со стороны оператора), который становится опорным, а вращение передней ручки 9 осуществляется против часовой стрелки (со стороны оператора). В данном варианте также должно выполняться условие (8).
Важно заметить, что при работе с культиваторами на фиг. 1, 7 передняя ручка 9 в конце операции вращения вокруг оси стойки 7 приходит в положение, аналогичное положениям передней ручки 9 на фиг. 8 (для праворукого оператора) и на фиг. 9 (для леворукого оператора), а при работе с культиваторами на фиг. 8, 9 передняя ручка 9 в конце операции вращения приходит в положение, когда она находится в вертикальной плоскости или в вблизи нее, как это имеет место на фиг. 1, 7.
Следовательно, задаваясь значениями параметра S можно ориентировочно определять величину параметра δmin из уравнения (7), а затем при выбранном угле наклона рукоятки 10 к присоединенной плоскости симметрии зубцов 3, 4 рабочего органа 2 (α или β) находить минимальное расстояние rmin середины передней ручки 9 от оси вращения культиватора 1 по выражению

Соответственно чем меньше предполагаемые углы α или β в процессе работы с культиватором, тем больше значение параметра rmin при выбранной величине параметра S.
Поскольку относительный параметр δmin/S имеет минимум в диапазоне варьирования S/(L-Z) от 0,2 до 0,32 (фиг. 6), то относительный параметр rmin (rmin/S) также имеет минимум в указанном диапазоне изменения величины S. Так, например, при росте оператора около 1,8 м минимум параметра δmin/S обеспечивается при изменении S от 0,32 м до 0,5 м. В этом случае, например, при угле α порядка 32° величина rmin составит от 0,29 м до 0,45 м в указанном диапазоне варьирования параметра S, что обеспечит и минимум веса конструкции культиватора.
Следует также отметить, что зубцы 3, 4 желательно выполнять прямыми, либо с небольшими криволинейностями, поскольку при малых радиусах изгиба возможна их упругая деформация в процессе ударного заглубления в почву, а также повышение лобового сопротивления почвы, что снижает эффективность данного процесса. В этом случае в целях минимизации усилий, противодействующих заглублению в почву зубцов 3, 4 необходимо организовать ось вращения культиватора таким образом, чтобы она была параллельна присоединенной плоскости симметрии зубцов 3, 4 рабочего органа 2 или, в лучшем случае, совпадала с ней. Средний линии зубцов 3, 4 также следует располагать параллельно оси вращения культиватора.
Ручки 8, 9 могут иметь различную форму, улучшающую их эргономические свойства, например выполнены V-образной формы (фиг. 10). Количество рабочих зубцов 4 и форма их сечений также могут быть различными. Рабочий орган 2, например, может содержать один опорный и два рабочих зубца круглого сечения (фиг. 11). Причем зубцы 3, 4 могут лежать либо в одной плоскости, либо, например, образовывать некую волнистую поверхность. В подобных случаях за плоскость рабочего органа 2 также следует брать присоединенную плоскость симметрии зубцов 3,4 рабочего органа 2 (усредненная плоскость, от которой точки поверхностей зубцов 3, 4 имеют наименьшее суммарное квадратичное отклонение). Поэтому в общем случае следует оперировать понятием «присоединенная плоскость симметрии зубцов», поскольку оно применимо как для идеальных геометрических конструкций рабочего органа 2 (зубцы являются идеальными стержнями и расположены в один ряд), так и для реальных конструкций с неидеальной формой самих зубцов и с их неидеальным расположением в пространстве. В любом случае полупространство, лежащее относительно присоединенной плоскости симметрии зубцов рабочего органа в направлении обрабатываемой зоны будет лицевым, а обращенное к оператору - будет тыльным. Ось симметрии рабочего органа 2 в конструкции на фиг. 11 совпадает с осью среднего рабочего зубца 4 (при одинаковом расстоянии между зубцами в плоскости рабочего органа).
При выполнении стойки 7 из металлической трубы она сама может играть роль тулейки (фиг. 11). Задняя ручка 8 в этом случае может быть выполнена путем изгиба стойки 7 в концевой части, а ее длина должна соответствовать ширине кисти оператора. Выполнение задней ручки 8 с поворотной рукояткой возможно, но нецелесообразно, поскольку при этом увеличивается расстояние между серединой задней ручки 8 и осью стойки 7, что увеличивает угол наклона культиватора 1 к почве и снижает дальность обработки почвы при прочих равных условиях, а также снижает энергетическую эффективность рыхления почвы. Предпочтительным вариантом является соосное расположение опорного зубца, стойки и середины задней ручки культиватора.
Угол изгиба задней ручки 8 и угол ее поворота относительно стойки 7 выбираются исходя из обеспечения наилучшей эргономичности. Передняя ручка 9 также может быть выполнена путем изгиба концевой части поворотной рукоятки 10 из металлической трубы, которая неподвижно крепится к стойке 7 (фиг. 11). Угол изгиба передней ручки 9 и угол ее поворота относительно поворотной рукоятки 10 также могут быть выбраны исходя из обеспечения наилучшей эргономичности. Крепление поворотной рукоятки 10 к стойке 7 лучше осуществлять таким образом, чтобы середина передней ручки 9 и центр тяжести культиватора 1 в рабочем положении находились в одной вертикальной плоскости. В этом случае создается минимальное вращающее усилие на кисть удерживающей руки оператора, что облегчает работу с культиватором.
Конструкция на базе металлических труб может быть выполнена и с отклонением передней ручки 9 от вертикальной плоскости, проходящей через центр тяжести культиватора 1, а рабочий орган 2 может быть изготовлен без соединительной планки 5 путем сварки зубьев 3, 4, загнутых из металлической проволоки, со стойкой 7 и между собой (фиг. 12).
Поворотная ручка 10 может располагаться под острым углом к стойке 7, как это показано на фиг. 13. В этом случае задняя ручка 8 и передняя ручка 9 с поворотной рукояткой 10 могут быть выполнены как единый сегмент, который затем приварен к стойке 7.
Возможны варианты, когда стойка 7, ручки 8, 9, поворотная рукоятка 10 и соединительная штанга 12 изготовлены методом гибки цельной металлической трубы, например подобно конструкции на фиг. 14, что минимизирует количество сварных соединений.
Могут быть реализованы различные модификации сборных конструкций предлагаемого ручного культиватора 1. Например, конструкция на фиг. 15 состоит из двух сегментов, каждый из которых является неразборным. Один сегмент включает ручки 8, 9, поворотную рукоятку 10 и соединительную штангу 12, выполненные методом изгиба из металлической трубы. В соединительной штанге 12 выполнены отверстия (на изображении не видны) для прохождения винтов 13. Второй сегмент состоит из рабочего органа 2 со стойкой 7, в которой выполнены отверстия 14 (могут быть сквозными или с резьбой). Оба сегмента соединены винтами 13, причем длина культиватора при этом может регулироваться путем выбора пары отверстий 14 на требуемом расстоянии от рабочего органа 2 (здесь она выбрана максимальной).
Конструкция на фиг. 16 выполнена аналогично конструкции на фиг. 15 и собрана из условия обеспечения минимальной длины культиватора 1. Причем задняя ручка 8 размещена в лицевом полупространстве относительно присоединенной плоскости симметрии зубцов 3, 4 рабочего органа 2. Это позволяет дополнительно уменьшить угол наклона культиватора 1 к поверхности почвы в рабочем положении, однако толкающие усилия на ручки 8, 9 со стороны оператора в этом варианте лежат в одном лицевом полупространстве, что увеличивает опрокидывающий момент на культиватор 1 в процессе углубления зубцов 3, 4 в грунт. В случае расположения ручек 8, 9 в разных полупространствах (например фиг. 11) достигается минимизация данного опрокидывающего момента на культиватор 1, поскольку основное толкающее усилие приходится на заднюю ручку 8 с малым рычагом относительно стойки 7, а меньшее усилие - на переднюю ручку 9 с большим рычагом, в результате чего создаваемые этими усилиями опрокидывающие моменты в разных полупространствах в значительной степени компенсируют друг друга.
Ручной культиватор 1 может быть собран из трех составных сегментов (фиг. 17). Здесь стойка 7 с рабочим органом 2 телескопически соединена с задней ручкой 8, имеющей продольное основание 15, а передняя ручка 9 с поворотной рукояткой 10 соединена с ними винтами 13, которые входят в отверстия 14 на стойке 7, отверстия в продольном основании 15 и в загнутом конце поворотной рукоятки 10 (на фиг. 17 не видны). В данном варианте возможна регулировка не только длины культиватора 1, но и расстояния S между ручками 8 и 9.
В общем случае могут быть выполнены различные сборные конструкции, в том числе с регулировкой длины поворотного рычага 10 (параметра δ), а также угловых положений ручек 8, 9, что может обеспечить индивидуальную настройку геометрических параметров культиватора 1 под конкретного оператора. Передняя ручка 9 с поворотной рукояткой 10 может быть выполнена складывающейся для уменьшения габаритов ручного культиватора 1 при транспортировке.
Приведенные примеры реализации предлагаемой конструкции ручного культиватора не исчерпывают все возможные варианты ее осуществления и обеспечивают снижение угла наклона культиватора в рабочем положении, увеличение дальности обработки почвы, повышение производительности труда и минимизацию усилий, в том числе вращающих, на кисти рук оператора.
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЧНОЙ КУЛЬТИВАТОР | 2021 |
|
RU2774809C1 |
| РУЧНОЙ КУЛЬТИВАТОР | 2020 |
|
RU2731983C1 |
| Ручной инструмент для хозяйственных и садово-огородных работ | 2022 |
|
RU2810741C2 |
| РУЧНОЙ ИНСТРУМЕНТ | 2022 |
|
RU2785922C1 |
| САДОВЫЙ РЕЖУЩИЙ ИНСТРУМЕНТ | 2020 |
|
RU2735743C1 |
| ТРУБНЫЙ КЛЮЧ | 2021 |
|
RU2767950C1 |
| РАЗВОДНОЙ КЛЮЧ | 2021 |
|
RU2811777C2 |
| ШАРНИРНЫЙ ИНСТРУМЕНТ | 2023 |
|
RU2817730C1 |
| ШАРНИРНЫЙ ИНСТРУМЕНТ С ФИКСАЦИЕЙ ПОЛОЖЕНИЯ | 2023 |
|
RU2806619C1 |
| ТРУБНЫЙ КЛЮЧ | 2022 |
|
RU2811619C2 |

Изобретение относится к сельскому хозяйству. Ручной культиватор содержит рабочий орган с по меньшей мере двумя зубцами, соединенный со стойкой, и две ручки, закрепленные на стойке, по крайней мере одна из которых размещена на поворотной рукоятке и расположена в лицевом полупространстве относительно присоединенной плоскости симметрии зубцов рабочего органа, причем передняя ручка, размещенная на поворотной рукоятке и расположенная в лицевом полупространстве относительно присоединенной плоскости симметрии зубцов рабочего органа, смещена относительно задней ручки вдоль оси стойки в направлении рабочего органа на расстояние S, величина которого удовлетворяет двойному неравенству 0,13⋅L≤S≤0,48⋅(L-Z), где L - общая длина ручного культиватора, м; Z - максимальная длина зубцов рабочего органа, м, причем середина передней ручки отстоит от присоединенной плоскости симметрии зубцов рабочего органа на расстояние δ, величина которого связана с параметром S выражением δ≥S⋅[5⋅(S*-0,24)2-0,4⋅(S*-0,24)+0,466], где S*=S/(L-Z) - относительная величина параметра S. Изобретение позволяет уменьшить угол наклона ручного культиватора относительно почвы при ее обработке без чрезмерного наклона туловища оператора, увеличить производительность обработки почвы под кустами. 3 з.п. ф-лы, 17 ил.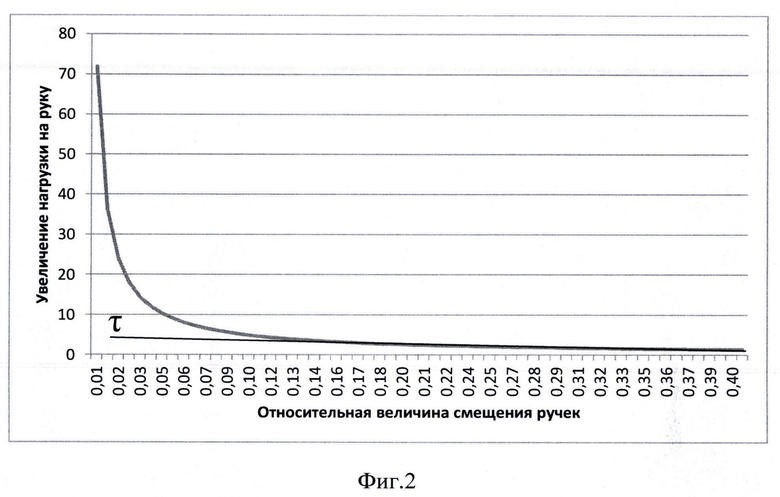
1. Ручной культиватор, содержащий рабочий орган с по меньшей мере двумя зубцами, соединенный со стойкой, и две ручки, закрепленные на стойке, по крайней мере одна из которых размещена на поворотной рукоятке и расположена в лицевом полупространстве относительно присоединенной плоскости симметрии зубцов рабочего органа, отличающийся тем, что передняя ручка, размещенная на поворотной рукоятке и расположенная в лицевом полупространстве относительно присоединенной плоскости симметрии зубцов рабочего органа, смещена относительно задней ручки вдоль оси стойки в направлении рабочего органа на расстояние S, величина которого удовлетворяет двойному неравенству
0,13⋅L≤S≤0,48⋅(L-Z),
где L - общая длина ручного культиватора, м; Z - максимальная длина зубцов рабочего органа, м,
причем середина передней ручки отстоит от присоединенной плоскости симметрии зубцов рабочего органа на расстояние δ, величина которого связана с параметром S выражением
δ≥S⋅[5⋅(S*-0,24)2-0,4⋅(S*-0,24)+0,466],
где S*=S/(L-Z) - относительная величина параметра S.
2. Культиватор по п. 1, отличающийся тем, что стойка, передняя ручка с поворотной рукояткой и задняя ручка выполнены из цельного металлического профиля как единое целое.
3. Культиватор по п. 1, отличающийся тем, что передняя ручка с поворотной рукояткой и задняя ручка выполнены в виде единой секции из цельного металлического профиля, которая сочленена со стойкой разъемным соединением с возможностью регулирования длины культиватора.
4. Культиватор по п. 1, отличающийся тем, что соединение стойки с задней ручкой выполнено телескопическим с возможностью регулирования длины культиватора, а передняя ручка с поворотной рукояткой представляют единый сегмент из цельного металлического профиля, который сочленен со стойкой разъемным соединением с возможностью регулирования расстояния между передней и задней ручками вдоль оси стойки.
| Фасонно-круглопалочный станок для изготовления круглых деталей переменного сечения | 1957 |
|
SU113109A1 |
| US 5435396 A1, 25.07.1995 | |||
| US 4213504 A1, 22.07.1980. | |||

