Изобретение относится к ручным орудиям труда для обработки почвы, преимущественно к садово-огородному инвентарю для копки и рыхления почвы, а также для борьбы с сорняками на открытых участках и под плодово-ягодными кустарниками с раскидистой кроной.
Известна конструкция ручного садово-огородного культиватора, включающая рабочий орган с по меньшей мере двумя зубцами, а также стойку, поворотную рукоятку, переднюю и заднюю ручки, последовательно соединенные между собой так, что передняя ручка скреплена с поворотной рукояткой, расположена в лицевом полупространстве относительно присоединенной плоскости симметрии зубцов рабочего органа и смещена относительно задней ручки вдоль осевой линии стойки в направлении рабочего органа (Патент RU №2735421, МПК А01В 1/00, А01В 1/06, 02.11.2020 г., вариант выполнения на фиг. 14 описания патента).
Недостатком данного устройства является сравнительно низкая жесткость участка конструкции культиватора от задней ручки до стойки, поскольку толкающее усилие, приложенное к задней ручке, передается на стойку через соединительную штангу, переднюю ручку и поворотную рукоятку. При этом ударное воздействие со стороны пользователя на заднюю ручку демпфируется промежуточными элементами со значительной линейной протяженностью. К тому же данные элементы расположены под углом друг к другу, что дополнительно уменьшает жесткость рассматриваемого участка конструкции культиватора. В результате снижаются ударное усилие зубцов рабочего органа на грунт и эффективность их внедрения в почву. Кроме того, участок культиватора от стойки до задней ручки в рассматриваемой конструкции предполагает последовательное соединение стойки, поворотной рукоятки, передней ручки, соединительной штанги, задней ручки и содержит четыре гиба трубы, что снижает технологичность изготовления культиватора.
Данная конструкция выбрана в качестве прототипа как наиболее близкая к заявленному устройству по технической сущности и достигаемому результату. Она обеспечивает уменьшение угла наклона ручного культиватора относительно почвы при ее обработке без чрезмерного наклона туловища пользователя и, соответственно, возрастание дальности обработки почвы, т.е. расстояния от ступней пользователя до наиболее удаленной обрабатываемой зоны, увеличение производительности обработки почвы под кустами благодаря ударному внедрению зубцов рабочего органа в почву, а также повышение удобства пользования ручным культиватором благодаря снижению усилий, в том числе вращающих, на кисти рук пользователя. Кроме того, конструкция Прототипа позволяет уменьшить количество сварных соединений в ручном культиваторе и тем самым повысить технологичность его производства.
Задачей изобретения является повышение жесткости участка конструкции культиватора от задней ручки до стойки и, соответственно, облегчение ударного проникновения зубцов рабочего органа в почву, а также снижение числа гибов на рассматриваемом участке и дополнительное повышение технологичности его изготовления.
Поставленная задача достигается тем, что ручной культиватор, также как в прототипе, содержит рабочий орган с по меньшей мере двумя зубцами, а также стойку, поворотную рукоятку, переднюю и заднюю ручки, последовательно соединенные между собой так, что передняя ручка, скреплена с поворотной рукояткой, расположена в лицевом полупространстве относительно присоединенной плоскости симметрии зубцов рабочего органа и смещена относительно задней ручки вдоль осевой линии стойки в направлении рабочего органа.
Согласно изобретению последовательное соединение составных частей культиватора между собой выполнено в следующей очередности - рабочий орган, стойка, задняя ручка, поворотная рукоятка, передняя ручка.
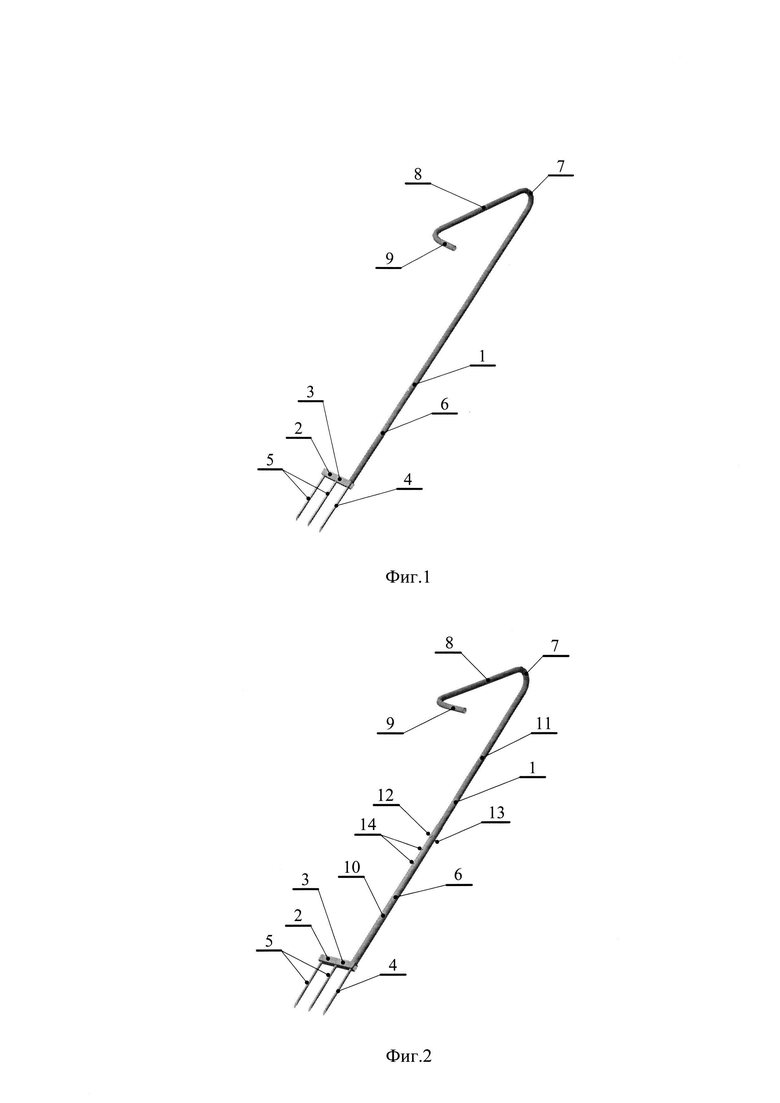
Сущность предлагаемого изобретения, во-первых, состоит в том, что задняя ручка 7 с одной стороны соединена со стойкой 6, а с другой стороны-с поворотной рукояткой 8, на которой размещена передняя ручка 9 (фиг. 1). В результате усилие с задней ручки 7 непосредственно передается на стойку 6 и с нее на рабочий орган 2, что обеспечивает повышение жесткости данного участка конструкции и более эффективное внедрение зубцов 4,5 рабочего органа в почву вследствие повышения динамических усилий со стороны присоединенных масс (стойки, задней ручки, поворотной рукоятки, передней ручки и руки пользователя) на рабочий орган при ударном внедрении зубцов 4,5 рабочего органа 2 в почву. Во-вторых, последовательное соединение стойки 6, задней ручки 7, поворотной рукоятки 8 и передней ручки 9 в предлагаемой конструкции позволяет уменьшить число гибов в ней до двух раз (с четырех гибов в Прототипе до двух гибов, например, в варианте на фиг. 1).
Таким образом, благодаря целенаправленному изменению взаимного расположения ряда составных элементов культиватора достигаются новые технические результаты- повышается жесткость участка конструкции культиватора от задней ручки до рабочего органа и, соответственно, снижается эффект конструкционного демпфирования передачи ударного воздействия с задней ручки на рабочий орган. В следствие этого повышаются величины максимальных мгновенных усилий в зоне взаимодействия зубцов с грунтом, что облегчает их проникновение в почву при прочих равных условиях. В результате процессы внедрения зубцов в грунт могут происходить с меньшими затратами энергии пользователем.
Кроме того, для изготовления предлагаемого культиватора требуется меньшее количество операций гибки металлического профиля по всей длине структурной цепи последовательно соединенных элементов инструмента. Соответственно, затраты на изготовление культиватора могут быть снижены в сравнение с Прототипом.
На фиг. 1 представлен культиватор с выполнением стойки, задней ручки, поворотной рукоятки и передней ручки из цельного металлического профиля с двумя гибами и со сварным соединением стойки с рабочим органом на основе поперечины из прямоугольного металлического профиля.
На фиг. 2 показан вариант культиватора на фиг. 1 с составной телескопической стойкой.
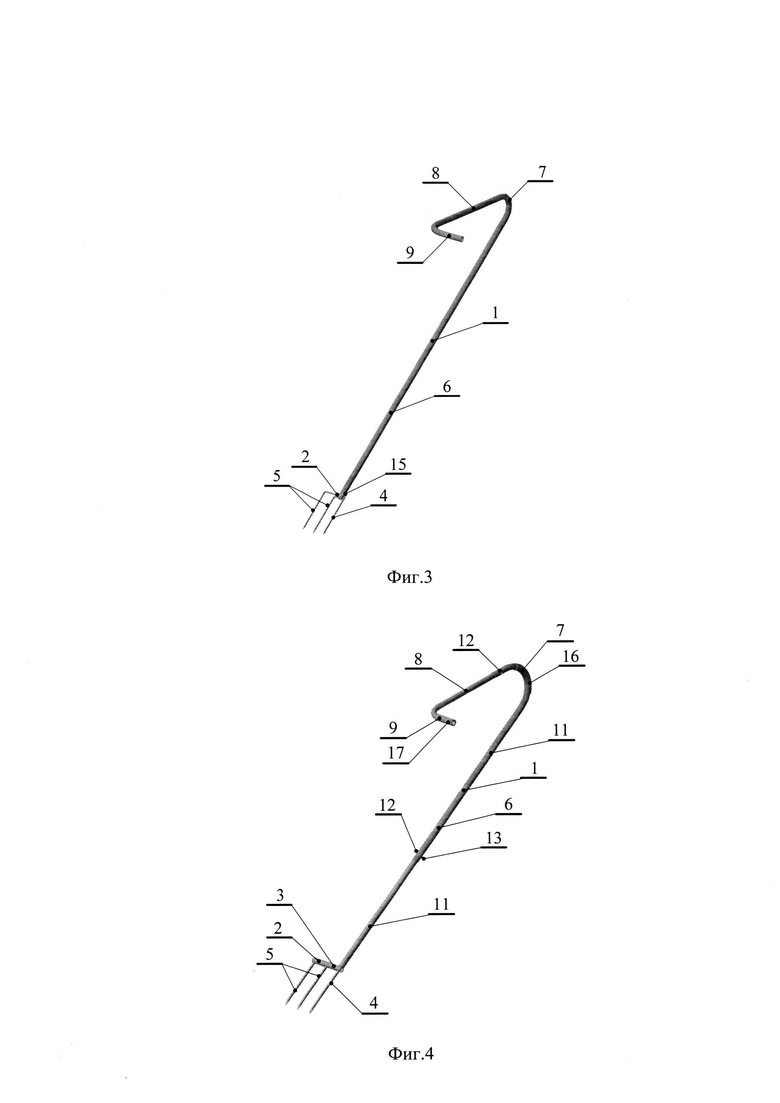
На фиг. 3 изображен вариант культиватора на фиг. 1 с выполнением рабочего органа без поперечины.
На фиг. 4 приведена модификация варианта культиватора на фиг. 2 с поперечиной рабочего органа из круглого металлического профиля и с телескопическим соединением поворотной рукоятки с задней ручкой.
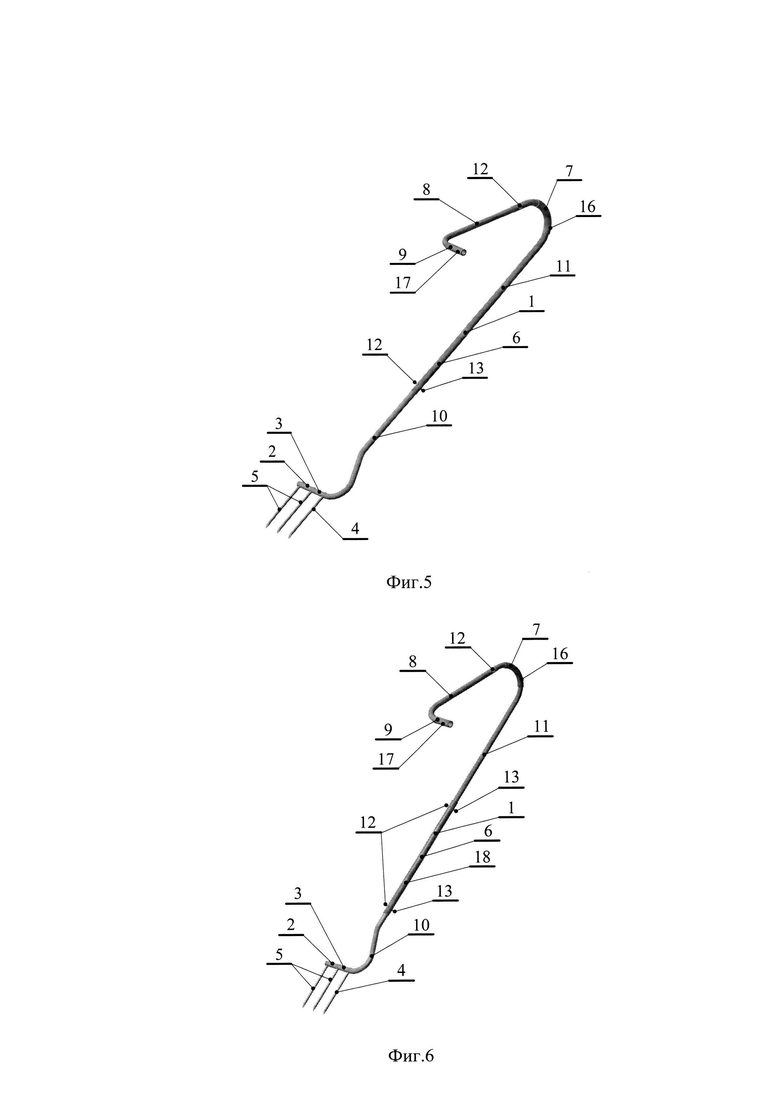
На фиг. 5 представлена модификация культиватора на фиг. 4 с выполнением поперечины рабочего органа и передней телескопической части стойки как единого целого.
На фиг. 6 показан вариант культиватора на основе конструкции на фиг. 5 с выполнением составной телескопической стойки из трех частей.
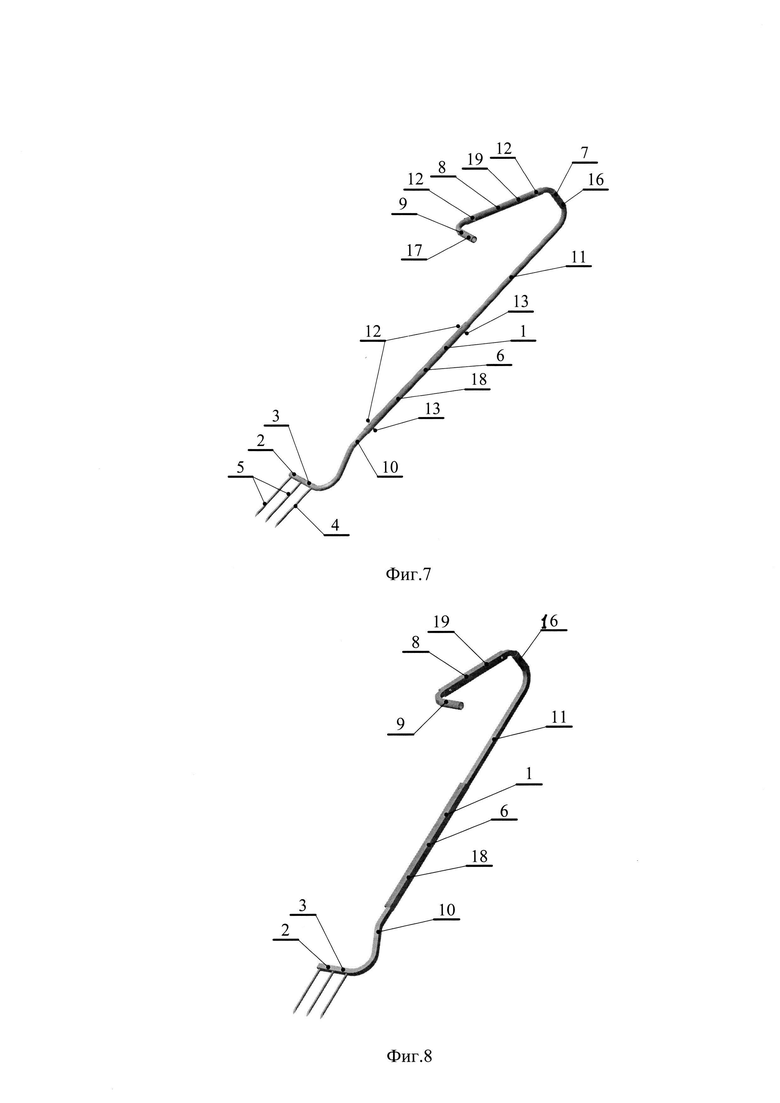
На фиг. 7 изображен вариант культиватора на базе конструкции на фиг. 6 с двумя гибами задней телескопической части стойки и с выполнением телескопического соединения передней ручки с поворотной рукояткой.
На фиг. 8 приведен вариант культиватора на основе конструкции на фиг. 7 с использованием квадратного металлического профиля.
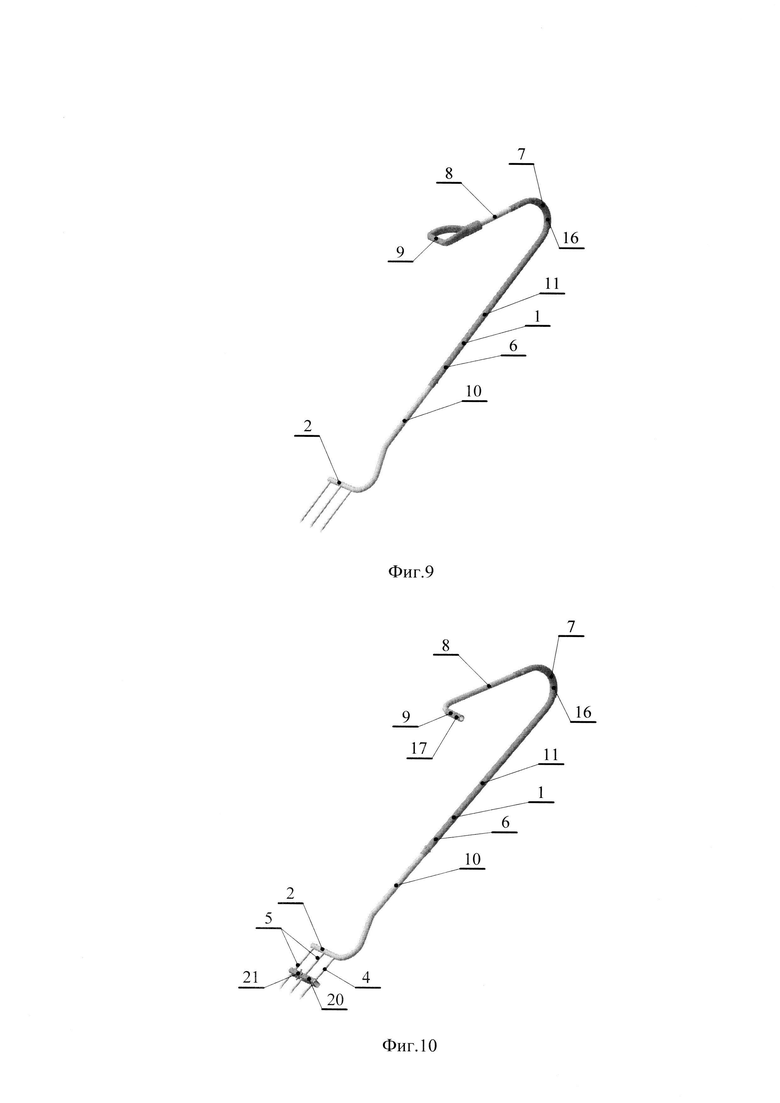
На фиг. 9 представлен вариант культиватора на основе конструкции на фиг. 5 с V-образной передней ручкой из пластмассы.
На фиг. 10 показан вариант культиватора на фиг. 5 с размещенным на его зубцах ограничителем глубины рыхления почвы.
Сущность предлагаемой конструкции ручного культиватора и достигаемые с ее помощью результаты можно дополнительно пояснить на различных примерах ее реализации. В одном из вариантов культиватор 1 состоит из рабочего органа 2 в виде поперечины 3 из прямоугольного металлического профиля, в отверстиях которого установлены опорный зубец 4 и два рабочих зубца 5 (фиг. 1). Со смещением относительно средней лини симметрии плоскости рабочего органа 2 (совпадает с осевой линией среднего зубца 5) на поперечине 3 закреплена стойка 6 из металлического круглого профиля. В концевой части стойки 6, отстоящей от рабочего органа 2, выполнен гиб круглого профиля в направлении лицевого полупространства относительно присоединенной плоскости симметрии зубцов 4, 5 (угол гиба лежит ориентировочно в диапазоне от 120 до 160 градусов) с образованием задней ручки 7 в виде дуги. Далее задняя ручка 7 переходит в поворотную рукоятку 8 в концевой части которой выполнена передняя ручка 9 путем гиба круглого профиля под углом около 90 градусов в направлении смещения осевой линии стойки 6 относительно средней лини симметрии плоскости рабочего органа 2. Данное направление гиба передней ручки 9 позволяет более эффективно осуществлять поворот рабочего органа 2 относительно опорного зубца 4 в процессе копки или рыхления почвы праворуким пользователем. Для леворукого пользователя указанное смещение осевой линии стойки 6 и направление гиба концевой части поворотной рукоятки 8 целесообразно выполнять в противоположных направлениях. В результате передняя ручка 9 оказывается смещенной вдоль осевой линии стойки 6 в направлении рабочего органа 2 и вверх относительно задней ручки 7, т.е. в лицевое полупространство относительно присоединенной плоскости симметрии зубцов 4, 5 рабочего органа 2. Гиб в области ручки 7 здесь выполнен с большим радиусом, чем гиб в области передней ручки 9.
Таким образом, рабочий орган 2, стойка 6, задняя ручка 7, поворотная рукоятка 8 и передняя ручка 9 в конструкции соединены последовательно между собой в указанной очередности. Причем стойка 6, задняя ручка 7, поворотная рукоятка 8 и передняя ручка 9 составляют единое целое, а отдельные функциональные элементы культиватора получены путем определенных гибов исходного металлического профиля (без использования сварки или других способов соединения).
В целях снижения габаритов культиватора 1 при транспортировке он может быть выполнен разборным. Например, стойка 6 может состоять из передней телескопической части 10 и задней телескопической части 11, которые соединены между собой винтом 12 с гайкой 13, навинченной на винт 12 (Фиг. 2). Винт 12 размещен в одном из сквозных отверстий 14 в передней телескопической части 10 и в соосном с ним сквозном отверстии в задней телескопической части 11. Наличие ряда отверстий 14 в передней телескопической части 10 позволяет дискретно регулировать высоту стойки 6 под рост конкретного пользователя. Ряд сквозных отверстий может быть выполнен и в задней телескопической части 11. Тогда в передней телескопической части 10 можно ограничиться одним сквозным отверстием 14.
Рабочий орган 2 может быть выполнен без поперечины 3. В этом случае зубцы 4, 5 крепятся непосредственно к стойке 6, выполняющей роль тулейки. Например, зубцы из металлического прутка (прямолинейной или загнутой формы) могут быть установлены в пазу 15 стойки 6 и зафиксированы там сваркой (фиг. 3).
Задняя телескопическая часть 11 стойки 6, включающая заднюю ручку 7, поворотную рукоятку 8 и переднюю ручку 9 (фиг. 2), в свою очередь, также может быть выполнена составной и содержать телескопическое соединение с винтом 12 (фиг. 4). Возможность отделения поворотной рукоятки 8 с передней ручкой 9 от задней ручки 7 позволяет дополнительно уменьшить габариты культиватора 1 в транспортировочном положении. Для обеспечения лучшего захвата ручек 7, 8 на них могут быть размещены накладки 16, 17, например, из силикона, полиуретана, резины или других подобных материалов.
Для снижения числа сварных соединений в предлагаемой конструкции культиватора 1 поперечина 3 рабочего органа 2 может быть выполнена путем загиба концевой части стойки 6 и представлять с ней единое целое. Например, концевая часть передней телескопической части 10 стойки 6 может быть загнута в форме, напоминающей вопросительный знак или цифру 7 (аналогично ручке бюгеля для малярного валика), как это показано на фиг. 5. Однако при этом несколько возрастает поперечный размер рабочего органа 2, что нежелательно при обработке почвы между рядом расположенными растениями. Вместе с тем в данной конструкции улучшен доступ к поперечине 3 для ноги пользователя при необходимости нажатия на рабочий орган 2 в процессе копки. Загиб концевой части стойки 6 может быть выполнен в форме буквы Г, однако при этом осевая линия стойки 6 будет значительно смещена относительно опорного зубца 4, что ухудшает кинематику вращения культиватора 1 относительно опорного зубца 4. Отнесение указанного загиба к стойке 6 здесь выполнено условно, поскольку его можно рассматривать и как загиб поперечины 3 рабочего органа 2.
Габариты культиватора 1 при упаковке могут быть дополнительно снижены путем разделения стойки 6 на три составляющие (фиг. 6). Здесь между передней телескопической частью 10 и задней телескопической частью 11 стойки 6 введена средняя телескопическая часть 18 стойки 6.
Узел поворотной рукоятки 8 также может быть выполнен в виде телескопического соединения части 19 с передней ручкой 9 (Г-образной формы), как это изображено на фиг. 7. Другой особенностью данной конструкции является выполнение в области задней ручки 7 двух гибов, позволяющих выполнить ее с более прямолинейным контуром в сравнении с задними ручками 7 с одним гибом (фиг. 1-6). Наличие двух гибов позволяет придать концевой части культиватора 1 со стороны, противоположной рабочему органу 2, форму буквы Л или П.
Основные элементы конструкции культиватора 1 могут быть выполнены из квадратного профиля, как это продемонстрировано на фиг. 8.
В общем случае в предлагаемой конструкции культиватора 1 расположение осевой линии стойки 6 может быть близким или совпадать с осью симметрии рабочего органа 2, однако варианты со смещением осевой линии стойки 6 в направлении опорного зубца 4 являются предпочтительными. Стойка 6 может быть выполнена с нелинейной осевой линией. Однако для обеспечения большей жесткости конструкции при передаче усилия с задней ручки 7 на рабочий орган 2 варианты с линейной стойкой 6 являются предпочтительными. Поворотная рукоятка 8, при необходимости, также может быть выполнена нелинейной. Передняя ручка 9 может быть загнута в форме цифры 7 (подобно выполнению поперечины 3 на фиг. 5) с расположением ее средней части на уровне осевой линии поворотной рукоятки 8. В качестве передней ручки 9 могут использоваться пластиковые, например, V-образные ручки, установленные на поворотной рукоятке 8 (фиг. 9). Рабочий орган 2 может содержать различное число зубцов с разным расстоянием между ними. Зубцы могут быть выполнены нелинейной формы, однако прямые зубцы являются предпочтительными, поскольку это повышает эффективность их внедрения в почву и упрощает использование в составе рабочего органа 2 ограничителя 20 глубины рыхления почвы, одеваемого на зубцы с возможностью перемещения вдоль зубцов и фиксации в требуемом положении, например, винтом 21. (фиг. 10). Вид соединений составных элементов культиватора может быть различным, например, они могут быть выполнены «внахлест» (сопрягаемые элементы располагаются рядом друг с другом). Способы соединений разборных частей культиватора также могут быть разными, например, может использоваться резьбовое соединение «труба в трубе» или соединение с помощью подпружиненных шплинтов и т.п. Телескопические и другие виды соединений могут быть выполнены с плавным регулированием длины соответствующего участка структурной цепи культиватора. Неразборные соединения могут быть выполнены с помощью сварки, пайки, заклепок, склеивания и др. Для выполнения конструкции культиватора могут быть применены различные материалы и их сочетания.
Приведенные примеры реализации предлагаемой конструкции ручного культиватора не исчерпывают все возможные варианты ее осуществления в пределах сущности изобретения.
Работа предлагаемого ручного культиватора может быть пояснена на примере использования варианта на фиг. 5. Перед началом работы производится сборка культиватора путем размещения передней телескопической части 10 стойки 6 в отверстие задней телескопической части 11 стойки 6 и их соединение винтом 12 с гайкой 13. Затем аналогично выполняется соединение поворотной рукоятки 8, включающей переднюю ручку 9, с концевой частью задней ручки 7. При этом выбирается расположение элементов культиватора, предпочтительное для праворукого или леворукого пользователя.
Затем пользователь одной рукой берется за переднюю ручку 9 и второй рукой - за заднюю ручку 7. Рабочий орган направляется в область обработки почвы, после чего зубцы 4,5 могут быть вдавлены в землю путем нажатия ногой на поперечину 3, или внедрены в почву путем ударного воздействия, приложенного к задней ручке 7 и частично к передней ручке 9 (данный вариант является более производительным). После этого прикладываются окружные усилия к передней ручке 9 и частично к задней ручке 7, в результате чего рабочий орган 2 поворачивается относительно опорного зубца 2 и взламывает почву рабочими зубцами 5. После этого цикл копки или рыхления может быть повторен.
Таким образом, предлагаемая конструкция ручного культиватора позволяет при сохранения основных функциональных свойств Прототипа дополнительно усилить эффективность внедрения зубцов рабочего органа в почву при ударном воздействии на инструмент со стороны пользователя и повысить технологичность его изготовления благодаря уменьшению количества гибов в конструкции.
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЧНОЙ КУЛЬТИВАТОР | 2019 |
|
RU2735421C1 |
| Ручной инструмент для хозяйственных и садово-огородных работ | 2022 |
|
RU2810741C2 |
| РУЧНОЙ ИНСТРУМЕНТ | 2022 |
|
RU2785922C1 |
| РУЧНОЙ КУЛЬТИВАТОР | 2020 |
|
RU2731983C1 |
| РАЗВОДНОЙ КЛЮЧ | 2021 |
|
RU2811777C2 |
| ШАРНИРНЫЙ ИНСТРУМЕНТ | 2023 |
|
RU2817730C1 |
| ТРУБНЫЙ КЛЮЧ | 2021 |
|
RU2767950C1 |
| ТРУБНЫЙ КЛЮЧ | 2022 |
|
RU2811619C2 |
| ОПОРА ДЛЯ РАСТЕНИЙ | 2023 |
|
RU2815447C1 |
| ШАРНИРНЫЙ ИНСТРУМЕНТ С ФИКСАЦИЕЙ ПОЛОЖЕНИЯ | 2023 |
|
RU2806619C1 |
Изобретение относится к сельскому хозяйству. Ручной культиватор (1) содержит рабочий орган (2) с по меньшей мере двумя зубцами (4 и 5), стойку (6), поворотную рукоятку (8), а также переднюю и заднюю ручки (9 и 7). Передняя и задняя ручки (9 и 7) последовательно соединены между собой так, что передняя ручка (9) скреплена с поворотной рукояткой (8), расположена в лицевом полупространстве относительно присоединенной плоскости симметрии зубцов (4 и 5) рабочего органа (2) и смещена относительно задней ручки (7) вдоль осевой линии стойки (6) в направлении рабочего органа (2). Последовательное соединение составных частей культиватора (1) между собой выполнено в следующей очередности - рабочий орган (2), стойка (6), задняя ручка (7), поворотная рукоятка (8), передняя ручка (9). Обеспечивается повышение жесткости участка конструкции культиватора от задней ручки до стойки и, соответственно, облегчение ударного проникновения зубцов рабочего органа в почву, а также снижение числа гибов на рассматриваемом участке и дополнительное повышение технологичности его изготовления. 9 з.п. ф-лы, 10 ил.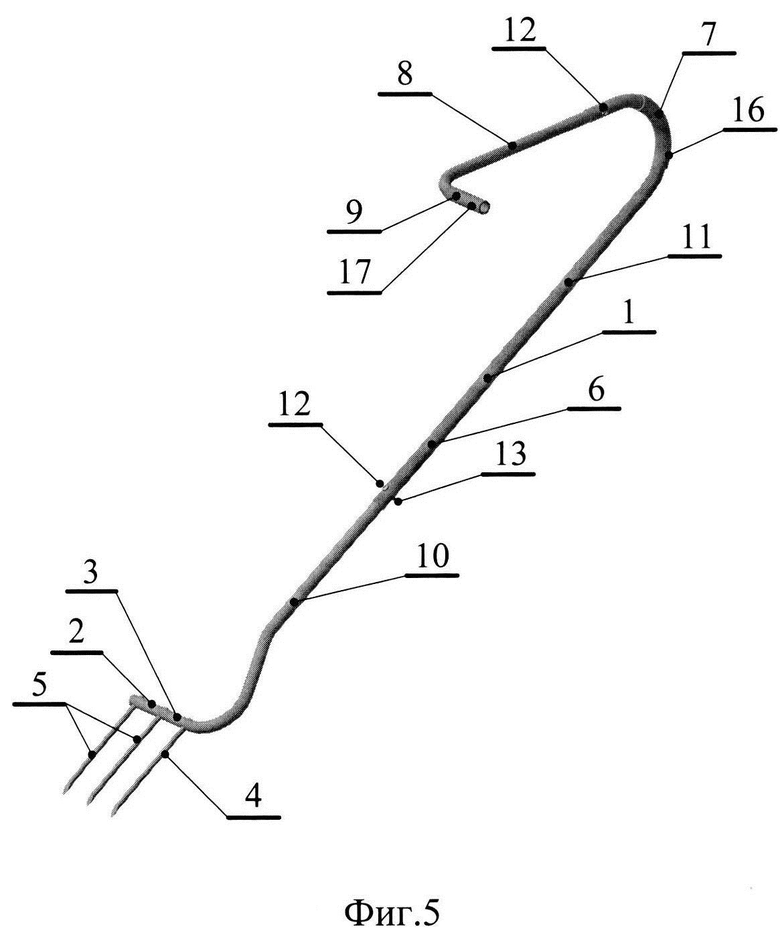
1. Ручной культиватор, содержащий рабочий орган с по меньшей мере двумя зубцами, а также стойку, поворотную рукоятку, переднюю и заднюю ручки, последовательно соединенные между собой так, что передняя ручка скреплена с поворотной рукояткой, расположена в лицевом полупространстве относительно присоединенной плоскости симметрии зубцов рабочего органа и смещена относительно задней ручки вдоль осевой линии стойки в направлении рабочего органа, отличающийся тем, что последовательное соединение составных частей культиватора между собой выполнено в следующей очередности - рабочий орган, стойка, задняя ручка, поворотная рукоятка, передняя ручка.
2. Культиватор по п. 1, отличающийся тем, что стойка, задняя ручка, поворотная рукоятка и передняя ручка выполнены в виде цельного изогнутого металлического профиля.
3. Культиватор по п. 1, отличающийся тем, что рабочий орган выполнен из металлических прутков, закрепленных на стойке.
4. Культиватор по п. 1, отличающийся тем, что рабочий орган выполнен в виде поперечины с установленными на ней зубцами, а роль поперечины выполняет загнутая концевая часть стойки.
5. Культиватор по п. 1, отличающийся тем, что стойка выполнена составной в виде разъемного телескопического соединения.
6. Культиватор по п. 5, отличающийся тем, что разъемное телескопическое соединение стойки состоит из трех частей.
7. Культиватор по п. 5, отличающийся тем, что задняя ручка выполнена путем гиба составной части телескопического соединения стойки.
8. Культиватор по п. 1, отличающийся тем, что передняя ручка выполнена путем гиба концевой части поворотной рукоятки, которая телескопически соединена с задней ручкой.
9. Культиватор по п. 7, отличающийся тем, что передняя ручка и поворотная рукоятка выполнены в виде телескопического соединения, а поворотная рукоятка телескопически соединена с задней ручкой.
10. Культиватор по одному из пп. 5-9, отличающийся тем, что элементы телескопических соединений выполнены из круглого или квадратного металлических профилей.
| РУЧНОЙ КУЛЬТИВАТОР | 2019 |
|
RU2735421C1 |
| FR 3080737 A1, 08.11.2019 | |||
| Воздушная форсунка | 1927 |
|
SU10506A1 |
| ЛОПАТА ДЛЯ ОБРАБОТКИ ПОЧВЫ | 1998 |
|
RU2152698C2 |
| US 10905907 B1, 02.02.2021. | |||

