Настоящее изобретение относится к способу и устройству манипулирования шинами, в частности, невулканизированными шинами.
Шина для колес транспортных средств, как правило, содержит каркасный конструктивный элемент, содержащий, по меньшей мере, один слой каркаса, имеющий соответственно противоположные концевые клапаны, введенные в контактное взаимодействие с соответствующими кольцевыми удерживающими конструктивными элементами, встроенными в зонах, обычно называемых наименованием «борта» и имеющих внутренний диаметр, по существу соответствующий так называемому «посадочному диаметру» шины на соответствующем монтажном ободе.
Каркасный конструктивный элемент соединен с брекерным конструктивным элементом, который может содержать один или более слоев брекера, расположенных с обеспечением их наложения в радиальном направлении друг на друга и на слой каркаса и имеющих текстильные или металлические армирующие корды с перекрещивающейся ориентацией и/или по существу параллельные направлению протяженности шины вдоль окружности (слой с нулевым углом). В радиальном направлении снаружи по отношению к брекерному конструктивному элементу наложен протекторный браслет, изготовленный из эластомерного материала подобно другим полуфабрикатам, образующим шину.
Соответствующие боковины из эластомерного материала дополнительно наложены в аксиальном направлении снаружи на боковые поверхности каркасного конструктивного элемента, при этом каждая боковина проходит от одного из боковых краев протекторного браслета до соответствующего кольцевого удерживающего конструктивного элемента в бортах.
После формирования невулканизированной шины, осуществляемого посредством сборки соответствующих компонентов, как правило, выполняют обработку, представляющую собой формование в пресс-форме и вулканизацию, для обеспечения стабилизации конструкции шины посредством сшивания эластомерных композиций, а также для создания заданного рисунка протектора на шине там, где требуется, и каких-либо отличительных или информационных графических знаков на боковинах шины.
Невулканизированная шина, хотя еще и не стабилизированная, имеет тороидальную конструкцию, которая сформирована вокруг оси вращения и является по существу симметричной относительно плоскости, средней в аксиальном направлении и перпендикулярной к указанной оси вращения. В частности, тороидальная конструкция «проходит» между двумя бортами, которые в невулканизированной шине образуют по существу самые наружные края вдоль аксиального направления самóй невулканизированной шины. В вулканизированной шине по существу самые наружные края вдоль аксиального направления вместо этого, как правило, находятся на боковинах.
Термин «эластомерный материал» используется для обозначения композиции, содержащей, по меньшей мере, один эластомерный полимер и, по меньшей мере, один активный наполнитель. Подобная композиция предпочтительно дополнительно содержит добавки, например, такие как сшивающий агент и/или пластификатор. Благодаря наличию сшивающего агента подобный материал может быть подвергнут сшиванию посредством нагрева для образования конечного изготовленного изделия.
Термин «шина» используется для обозначения любой невулканизированной шины, то есть шины, полученной в конце процесса сборки и еще не подвергнутой формованию в пресс-форме и вулканизации, а также отформованной в пресс-форме и вулканизированной шины.
Термин «плоскость, средняя в аксиальном направлении» используется для обозначения плоскости, перпендикулярной к оси вращения и равноудаленной от аксиально наружных частей самóй шины.
Термин «линия обнаружения» используется для обозначения линии перехвата/пересечения, характеризующей направление функционирования датчика, выполненного с возможностью распознавания наличия шины.
«Край» шины означает стратегическую часть, по меньшей мере, на теоретическом профиле шины, например, часть профиля шины, наиболее удаленную от центра в аксиальном направлении. Примеры краев могут быть представлены бортами (характеризующими крайние места невулканизированной шины) или боковинами, или местами перехода между боковинами и протектором.
Выражение «в пределах/внутри шины» означает по существу цилиндрическую зону, близкую к оси вращения шины и проходящую в аксиальном и радиальном направлениях между бортами.
В высокоавтоматизированных процессах сборки шин во время этапов сборки форма изготавливаемой шины, как правило, определяется сборочным барабаном для облегчения манипулирования комплектом, состоящим из барабана и изготавливаемой шины. Данный аспект еще более очевиден в случае так называемых «одноэтапных» процессов, в которых каркас отделяют в виде невулканизированной шины от сборочного барабана только в конце всего технологического процесса сборки.
Между концом процесса сборки и началом формования в пресс-форме и вулканизации на невулканизированной шине, отсоединенной от сборочного барабана, как правило, выполняют некоторые вспомогательные операции, включая нанесение штрихового кода, прикрепление одной или более этикеток изделия, или, в более общем случае, невулканизированную шину перемещают к устройству автоматического манипулирования. Данные вспомогательные операции выполняют, используя устройство манипулирования, которое может включать в себя устройства захвата невулканизированной шины.
Заявитель обратил внимание на то, что при выполнении данных вспомогательных операций невулканизированная шина не имеет геометрически стабильной формы, поскольку она еще не вулканизирована и больше не опирается на указанный формообразующий барабан.
Заявитель осознал, что это обстоятельство не позволяет обеспечить бóльшую автоматизацию процесса изготовления шины, начиная от сборки вплоть до этапа формования в пресс-форме/вулканизации.
Кроме того, Заявитель осознал, что для автоматизации также указанных процессов, следующих за процессом сборки шины, необязательно полностью стабилизировать форму невулканизированной шины, что вызывает удлинение продолжительности паузы в той части процесса изготовления шины, которая связана с указанными вспомогательными операциями, но может быть достаточным получение данных о положении шины на основе обнаружения определенных базовых точек, принадлежащих самóй шине.
Заявитель обнаружил, что получение данных о положении двух краев невулканизированной шины в зависимости от положения заданной базы отсчета позволяет автоматически управлять вспомогательными операциями, которые требуют манипулирования самóй невулканизированной шиной, без отрицательного влияния на длительность паузы для невулканизированной шины во время производственного процесса.
Заявитель также обнаружил, что такое получение данных также может быть предпочтительно использовано для любого манипулирования шиной, которое должно быть выполнено в конце процесса формования в пресс-форме и вулканизации.
Согласно его первому аспекту настоящее изобретение относится к способу манипулирования шинами.
Способ предпочтительно включает обеспечение первого перемещения линии обнаружения и шины друг относительно друга для получения данных о положении первого края указанной шины относительно базы отсчета посредством указанной линии обнаружения.
Способ предпочтительно включает обеспечение второго перемещения указанной линии обнаружения и указанной шины друг относительно друга для получения данных о положении второго края указанной шины относительно указанной базы отсчета посредством указанной линии обнаружения.
Способ предпочтительно включает позиционирование захватного устройства и захват указанной шины посредством указанного захватного устройства с учетом положений указанных первого и второго краев относительно указанной базы отсчета.
Заявитель полагает, что при выполнении двух относительных перемещений для получения данных о положении двух краев шины можно обеспечить регулируемый захват шины в зависимости от положения данных двух краев в соответствии с получением информации об их положении в пространстве относительно выбранной базы отсчета.
Заявитель также полагает, что при работе в соответствии со способом манипулирования согласно настоящему изобретению можно также автоматизировать вспомогательные операции без отрицательного влияния на длительности пауз.
Согласно его второму аспекту настоящее изобретение относится к устройству манипулирования шинами.
Устройство манипулирования предпочтительно включает в себя захватное устройство, содержащее, по меньшей мере, один датчик, выполненный с возможностью обнаружения края шины на линии обнаружения, задаваемой самим датчиком, при этом указанный датчик расположен на заданном расстоянии относительно базы отсчета.
Устройство манипулирования предпочтительно включает в себя блок управления, функционально связанный с указанным захватным устройством.
Блок управления предпочтительно запрограммирован для выполнения способа манипулирования указанными шинами.
Заявитель полагает, что устройство манипулирования согласно настоящему изобретению позволяет оптимизировать обращение с шиной также во время операций, которые являются вспомогательными для фактического изготовления, без создания чрезмерной нагрузки на устройство или чрезмерного усложнения самой конструкции устройства.
В одном или более из вышеуказанных аспектов настоящее изобретение может содержать один или более из следующих признаков.
Для обеспечения указанного первого относительного перемещения и/или указанного второго относительного перемещения указанную линию обнаружения и/или указанную шину предпочтительно перемещают параллельно аксиальному направлению указанной шины.
Заявитель полагает, что перемещение параллельно аксиальному направлению позволяет упростить как получение данных о положении краев шины, так и захват шины.
Указанная линия обнаружения предпочтительно расположена перпендикулярно к указанному аксиальному направлению.
Для обеспечения указанного первого и/или указанного второго относительных перемещений указанную линию обнаружения и/или указанную шину предпочтительно перемещают по существу в соответствии с аксиальным направлением указанной шины.
Для обеспечения указанного первого и/или указанного второго относительных перемещений указанную линию обнаружения предпочтительно перемещают в пределах указанной шины.
Заявитель полагает, что перемещение датчика внутри шины обеспечивает возможность функционирования для эффективного выполнения захвата внутри при удерживании шины снаружи посредством соответствующих транспортно-загрузочных устройств.
Указанные первый край и второй край предпочтительно представляют собой края шины, наиболее удаленные от центра в аксиальном направлении. Еще более предпочтительно, если указанные первый край и второй край представляют собой края, каждый из которых расположен на борте соответственно с противоположных сторон относительно плоскости шины, средней в аксиальном направлении.
Заявитель полагает, что выбор зоны на двух бортах позволяет задать положение зон захвата в пространстве в пределах шины и, возможно, экстраполировать дополнительные данные, такие как расстояние между данными двумя краями.
Предпочтительно предусмотрено определение геометрического центра шины путем вычислений относительно указанной базы отсчета исходя из расстояния между указанными первым и вторым краями.
Предпочтительно предусмотрено вычисление расстояния между указанным первым краем и указанным вторым краем.
Предпочтительно предусмотрено определение положения шины в пространстве исходя из положения первого и второго краев, из положения геометрического центра и из предварительно заданных данных, относящихся к теоретическому профилю шины.
Заявитель полагает, что наличие данных о положении шины в пространстве позволяет оптимизировать как захват, так и последующие вспомогательные операции.
Указанное захватное устройство предпочтительно составляет одно целое с указанной линией обнаружения и определяет указанную базу отсчета.
Заявитель полагает, что манипулирование шиной упрощается при обеспечении линии обнаружения непосредственно на захватном устройстве.
Позиционирование указанного захватного устройства предпочтительно включает обеспечение движения позиционирования указанного захватного устройства и указанной шины друг относительно друга для достижения заданного взаимного расположения при захвате, при котором указанное захватное устройство выступает на заданное расстояние от указанного первого или второго края, перед захватом указанной шины.
Заявитель полагает, что можно обеспечить регулирование габаритных размеров как шины, так и захватного устройства по отношению к последующим станциям.
Указанное захватное устройство предпочтительно включает в себя радиально раздвижной зажим, содержащий указанную базу отсчета и удерживаемый одним концом антропоморфного робота, выполненного с возможностью перемещения относительно указанной шины, при этом указанная линия обнаружения расположена на сегменте указанного радиально раздвижного зажима. Еще более предпочтительно, если захват указанной шины включает раздвигание указанного радиально раздвижного зажима внутри указанной шины с учетом положения указанного первого края и указанного второго края.
Заявитель полагает, что использование радиально раздвижного зажима представляет собой один из наиболее эффективных способов перемещения шины и что данное раздвигание дополнительно оптимизируется при выполнении захвата в зависимости от положения первого края и второго края.
Положение геометрического центра шины предпочтительно определяют относительно указанного радиально раздвижного зажима.
Обеспечение указанного первого и/или указанного второго относительных перемещений предпочтительно включает обеспечение относительного перемещения для перехвата, при котором указанная линия обнаружения имеет регулируемую скорость перехвата относительно шины, имеющую направление, адаптированное для перехвата соответственно указанного первого края и/или указанного второго края.
Указанное захватное устройство предпочтительно перемещают внутри указанной шины.
Обеспечение указанного первого или указанного второго относительного перемещения предпочтительно включает продолжение указанного относительного перемещения для перехвата до тех пор, пока указанная линия обнаружения не пересечет указанный первый край или указанный второй край указанной шины. Еще более предпочтительно, если обеспечение указанного первого или указанного второго относительного перемещения включает изменение направления указанного относительного перемещения для перехвата посредством обеспечения перемещения указанной линии обнаружения и указанной шины друг относительно друга, предназначенного для обнаружения, при этом указанная линия обнаружения имеет регулируемую скорость обнаружения относительно шины, имеющую противоположное направление и меньшее абсолютное значение по отношению к регулируемой скорости перехвата. Еще более предпочтительно, если обеспечение указанного первого или указанного второго относительного перемещения включает продолжение указанного относительного перемещения для обнаружения до тех пор, пока указанная линия обнаружения снова не пересечет указанный первый край или указанный второй край, обеспечивая определение его положения относительно указанной базы отсчета.
Заявитель полагает, что выполнение сбора данных при двух разных скоростях позволяет не увеличивать время паузы для шины во вспомогательной части производственного процесса и в то же время автоматизировать весь процесс. В частности, Заявитель полагает, что эти преимущества достигаются при обеспечении перемещений датчика и шины друг относительно друга, которые представляют собой относительное перемещение для перехвата с высокой скоростью для распознавания присутствия шины и относительное перемещение для обнаружения с низкой скоростью для определения точного положения перехваченного края относительно базы отсчета.
Предпочтительно предусмотрено выполнение, по меньшей мере, одной вспомогательной операции на указанной захваченной шине с учетом положений указанных первого и второго краев относительно указанной базы отсчета. Еще более предпочтительно, если указанная вспомогательная операция включает, по меньшей мере, одну операцию, выбранную из нанесения штрихового кода, прикрепления одной или более этикеток изделия, выдачи указанной шины в устройство автоматического манипулирования.
Указанное захватное устройство предпочтительно включает в себя радиально раздвижной зажим, предусмотренный с множеством радиально раздвигаемых сегментов и удерживаемый концом антропоморфного робота.
Заявитель полагает, что данный вариант осуществления является особенно универсальным и позволяет работать при высоких скоростях.
Указанный блок управления предпочтительно запрограммирован для перемещения указанного зажима внутри шины для обеспечения указанных первого и второго относительных перемещений.
Указанный блок управления предпочтительно запрограммирован для раздвигания указанного радиально раздвижного зажима внутри указанной шины в зависимости от положения указанного первого края и указанного второго края.
Заявитель полагает, что использование радиально раздвижного зажима внутри шины представляет собой вариант осуществления, который оптимизирует результаты автоматизации вспомогательных операций.
Указанный блок управления предпочтительно запрограммирован для обеспечения движения позиционирования указанного захватного устройства и указанной шины друг относительно друга для достижения заданного взаимного расположения при захвате, при котором указанное захватное устройство выступает на заданное расстояние от указанного первого или второго края, перед захватом указанной шины.
Указанный датчик предпочтительно расположен на сегменте указанного радиально раздвижного зажима так, что указанная линия обнаружения расположена перпендикулярно к указанному сегменту.
Указанный датчик предпочтительно расположен на сегменте на расстоянии от того свободного конца радиально раздвижного зажима, который определяет базу отсчета на самóм радиально раздвижном зажиме.
Указанный датчик предпочтительно расположен на указанном захватном устройстве так, что указанная линия обнаружения расположена перпендикулярно к аксиальному направлению шины.
Указанный блок управления предпочтительно запрограммирован для определения положения шины в пространстве исходя из положения первого и второго краев, из положения геометрического центра и из предварительно заданных данных, относящихся к теоретическому профилю шины.
Указанная шина предпочтительно представляет собой невулканизированную шину.
Датчик предпочтительно содержит фотодатчик или устройство, выполненное с возможностью обнаружения электромагнитного излучения и выдачи выходного сигнала, пропорционального интенсивности обнаруженного излучения.
Еще более предпочтительно, если датчик представляет собой фотоэлектрический датчик или фотоэлемент.
Дополнительные признаки и преимущества станут более очевидными из подробного описания предпочтительного, но не единственного варианта осуществления способа и устройства манипулирования шинами согласно настоящему изобретению.
Такое описание приведено в дальнейшем со ссылкой на сопровождающие чертежи, представленные только в иллюстративных целях и, следовательно, не для ограничения, на которых:
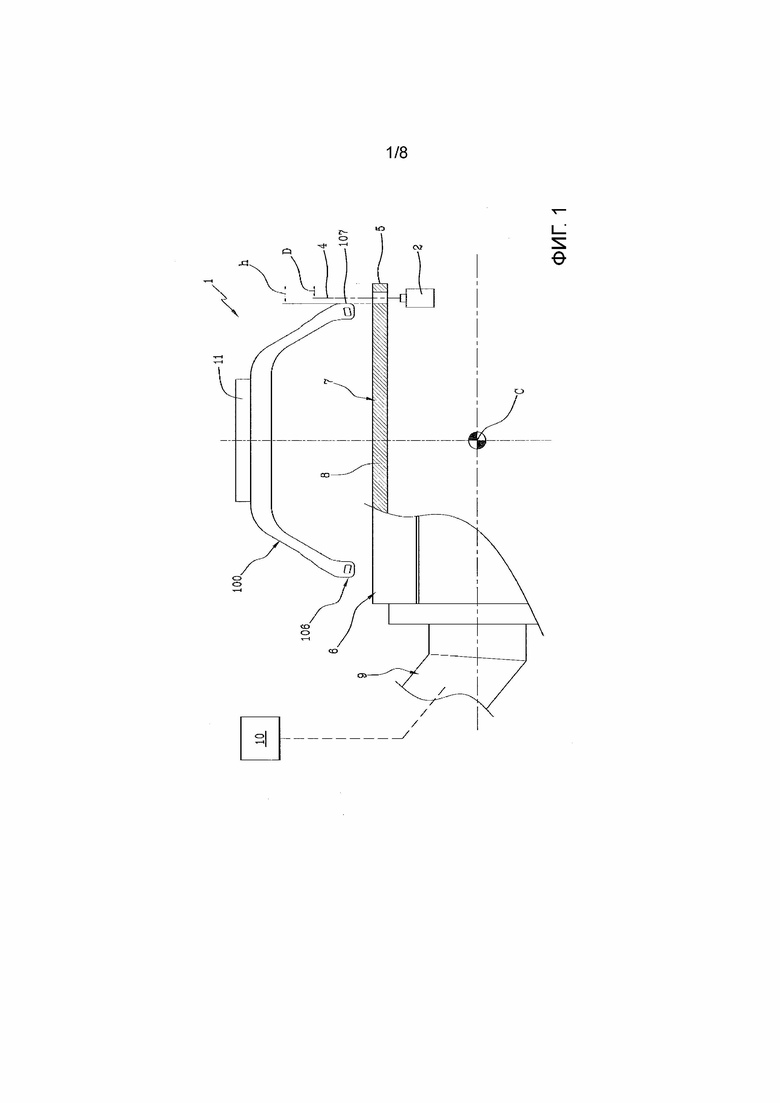
- фиг.1 схематически показывает устройство манипулирования невулканизированными шинами;
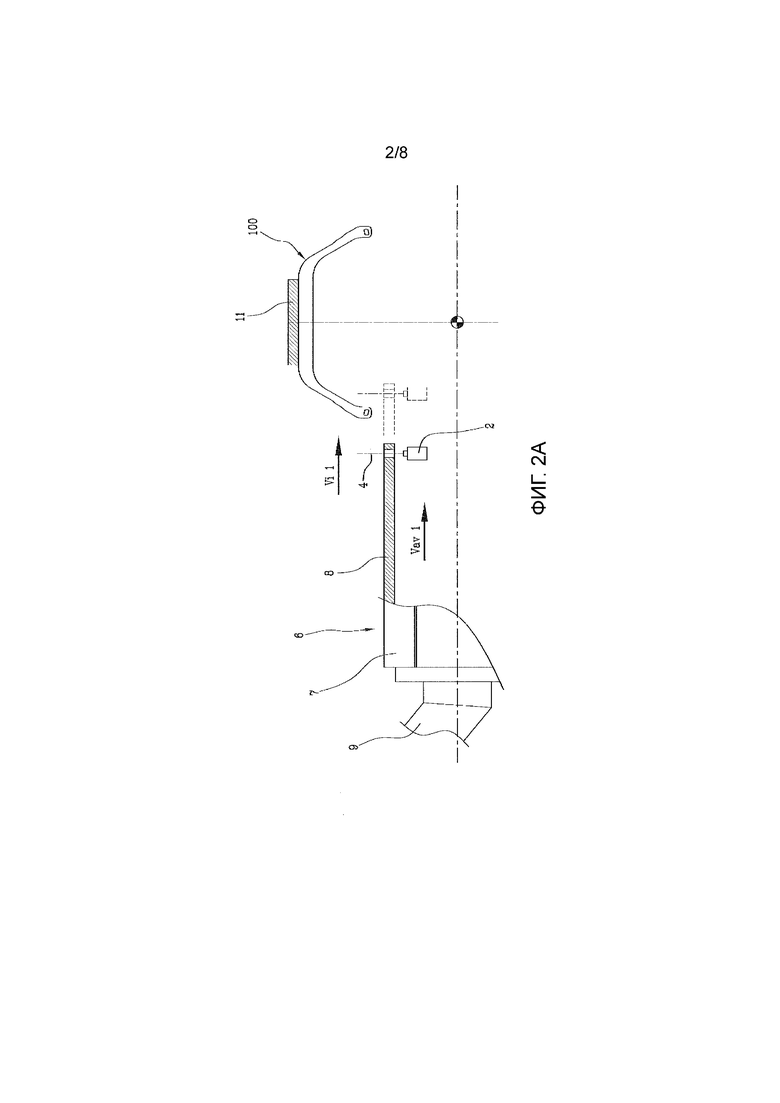
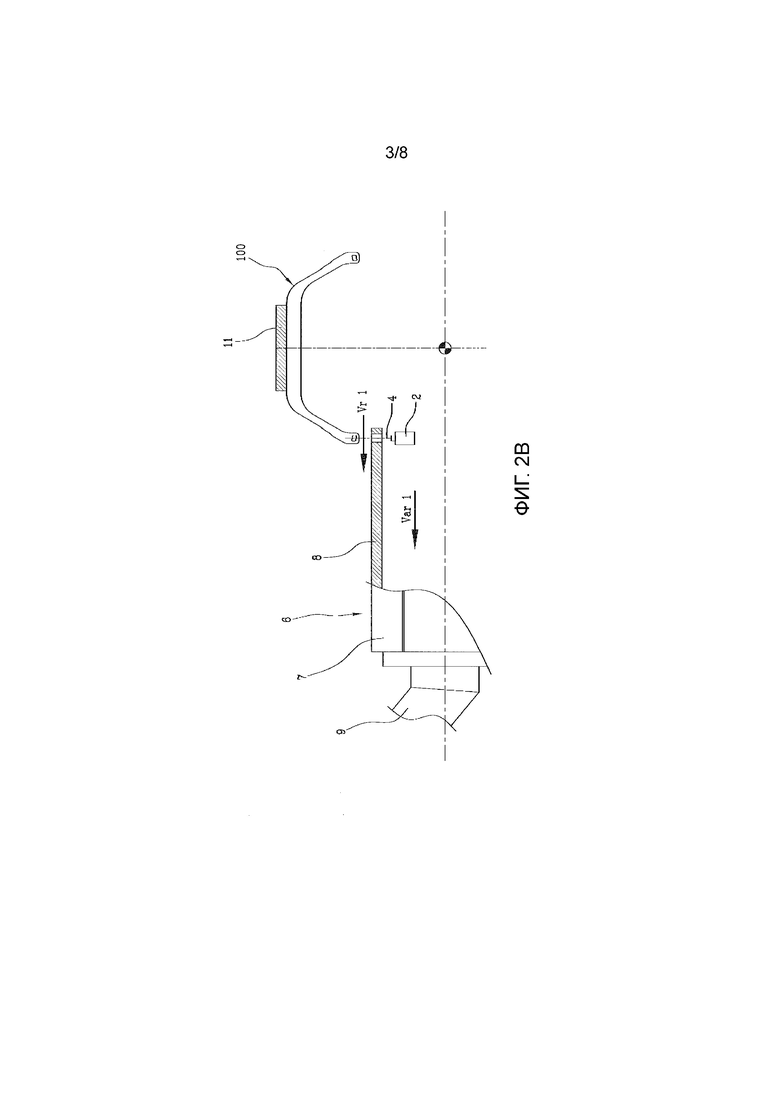
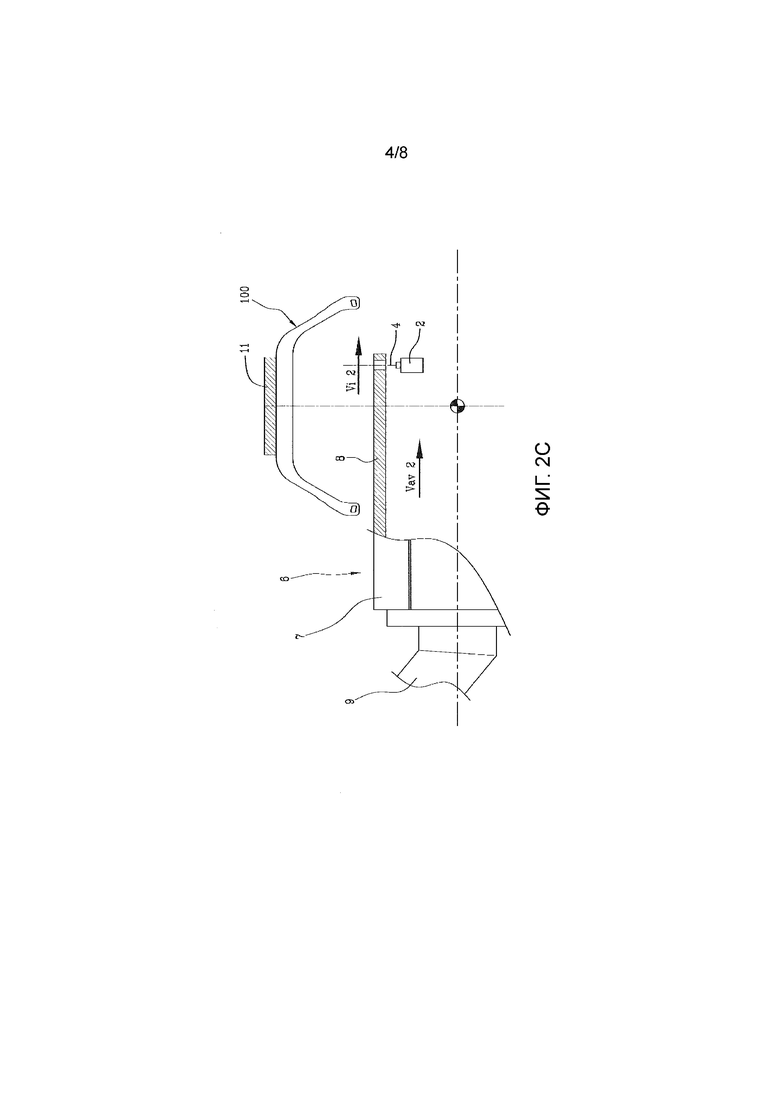
- фиг.2а-2f показывают устройство с фиг.1 в разных рабочих состояниях; и
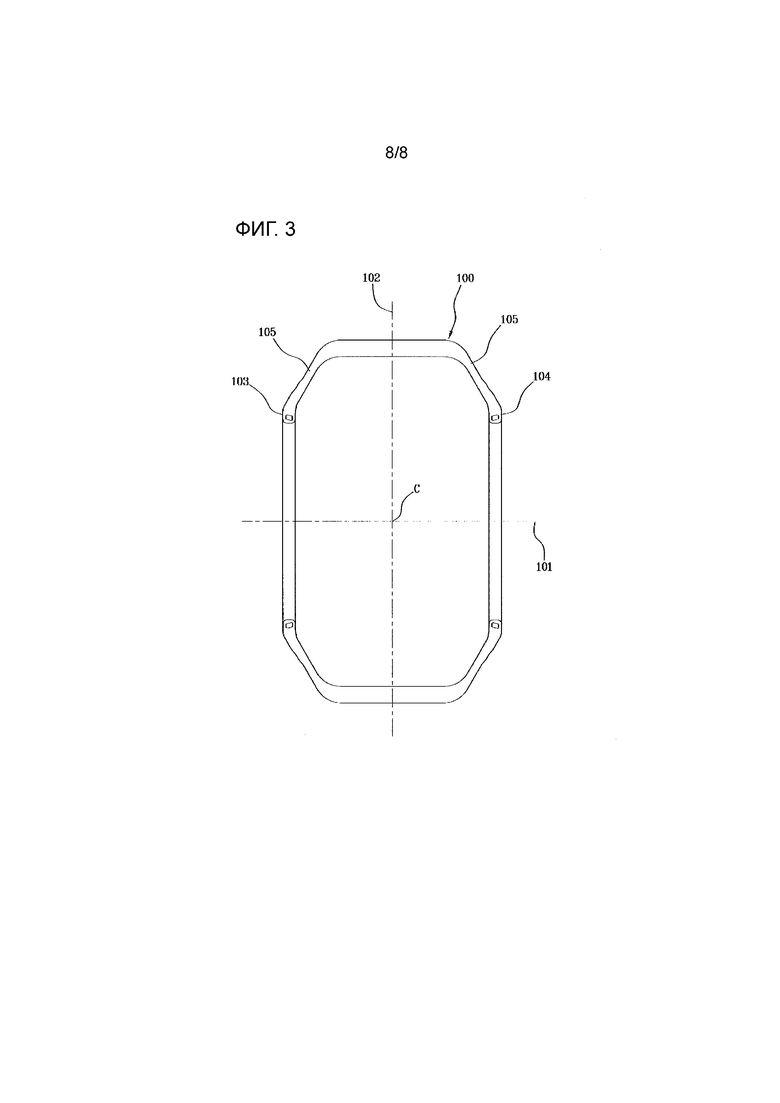
- фиг.3 показывает схематическое осевое сечение невулканизированной шины.
На чертежах ссылочной позицией 1 обозначено в целом устройство манипулирования невулканизированными шинами.
Фиг.3 схематически показывает невулканизированную шину 100. Ее форма не стабилизирована, поскольку она еще не была подвергнута формованию в пресс-форме и вулканизации. В любом случае она может быть определена как тороидальная конструкция, которая «намотана» вокруг оси 101 вращения и является по существу симметричной относительно плоскости 102, средней в аксиальном направлении и перпендикулярной к оси 101 вращения.
Ось 101 вращения определяет аксиальное направление невулканизированной шины.
В частности, тороидальная конструкция «проходит» между двумя открытыми концами 103, 104, обычно определяемыми термином «борта», которые в невулканизированной шине представляют собой края, по существу наиболее удаленные от центра вдоль аксиального направления самóй невулканизированной шины, и расположены соответственно с противоположных сторон невулканизированной шины относительно плоскости 102, средней в аксиальном направлении. Ссылочная позиция 105 обозначает боковины невулканизированной шины 100.
В общем случае, как показано на фиг.1, устройство 1 манипулирования содержит, по меньшей мере, один датчик 2, выполненный с возможностью обнаружения края невулканизированной шины 100 на линии 4 обнаружения, задаваемой самим датчиком. Датчик 2 расположен на заданном расстоянии относительно базы 5 отсчета.
Как показано на чертежах, датчик 2 представляет собой фотоэлемент.
Как показано на фиг.1, устройство 1 манипулирования содержит захватное устройство 6. Датчик 2 расположен в захватном устройстве 6, которое, таким образом, содержит сам датчик.
В этом случае датчик 2 расположен на заданном расстоянии ʺDʺ относительно базы 5 отсчета, образуемой одним концом захватного устройства 6. Кроме того, датчик 2 выполнен с возможностью перемещения относительно невулканизированной шины 100 как одно целое с захватным устройством 6.
Предпочтительно известно положение базы 5 отсчета на захватном устройстве 6 относительно заданной системы отсчета.
Согласно возможному варианту осуществления захватное устройство 6 содержит радиально раздвижной зажим 7, предусмотренный с множеством радиально раздвигаемых сегментов 8. Датчик 2 предпочтительно расположен в одном из сегментов 8, еще более предпочтительно - на расстоянии ʺDʺ от того свободного конца радиально раздвижного зажима 7, который определяет базу 5 отсчета на самóм радиально раздвижном зажиме 7. Предпочтительно известно положение базы 5 отсчета на радиально раздвижном зажиме 7 относительно заданной системы отсчета.
Датчик 2 предпочтительно расположен на радиально раздвижном зажиме 7 так, что его линия 4 обнаружения расположена перпендикулярно к аксиальному направлению протяженности самого зажима.
Радиально раздвижной зажим 7 удерживается одним концом антропоморфного робота 9, который представляет собой часть захватного устройства 6.
Таким образом, радиально раздвижной зажим 7 может быть перемещен со скоростью подвода и скоростью отвода относительно невулканизированной шины 100. Радиально раздвижной зажим 7 предпочтительно может быть перемещен вдоль аксиального направления его протяженности со скоростью подвода и скоростью отвода параллельно аксиальному направлению невулканизированной шины, как будет подробно описано в дальнейшем.
Устройство 1 манипулирования дополнительно содержит блок 10 управления, функционально связанный с захватным устройством 6 и запрограммированный для выполнения одной или более операций, как будет описано в дальнейшем.
Устройство 1 манипулирования выполнено с возможностью выполнения способа манипулирования шинами, в котором на невулканизированной шине выполняют одну или более вспомогательных операций, например, выбранных из:
- нанесения штрихового кода;
- прикрепления одной или более этикеток изделия,
- выдачи указанной шины 100 в непоказанную систему с автоматическим управлением.
Манипулирование шиной может выполняться, например, посредством захватного устройства 6.
Невулканизированную шину 100 предварительно размещают для выполнения, по меньшей мере, одной вспомогательной операции на ней перед формованием в пресс-форме и вулканизацией.
Например, невулканизированную шину 100 захватывают из сборочной линии, предпочтительно на станции сборки и придания формы, посредством транспортно-загрузочного устройства 11. Транспортно-загрузочное устройство 11 предпочтительно представляет собой подвесное транспортно-загрузочное устройство, выполненное с возможностью удерживания невулканизированной шины 100 в зоне ее радиально наружной поверхности, то есть в зоне протекторного браслета.
При использовании захватное устройство 6 захватывает невулканизированную шину 100 и делает ее доступной для последующих операций. В частности, в случае радиально раздвижного зажима антропоморфный робот 9 вставляет радиально раздвижной зажим 7 в аксиальном направлении внутрь невулканизированной шины 100 и после достижения надлежащего взаимного расположения раздвигает его так, чтобы захватить шину изнутри, то есть у так называемых «бортов». После этого антропоморфный робот 9 перемещает невулканизированную шину 100 для выполнения последующих операций. Как будет описано в дальнейшем, при получении данных о положении двух базовых краев шин можно оптимизировать последующее манипулирование не только потому, что зажим размещен надлежащим образом внутри шины, но и также потому, что можно определить посредством вычислений положение геометрического центра шины относительно самого зажима и с помощью таких данных при интерполяции их вместе с данными исходно ожидаемого теоретического профиля получить информацию о положении шины в пространстве для правильного выполнения последующих вспомогательных операций.
В случае нанесения штрихового кода шину непосредственно перемещают посредством захватного устройства 6, в частности, посредством антропоморфного робота 9, который размещает ее на станции нанесения штрихового кода.
В случае прикрепления одной или более этикеток изделия шину непосредственно перемещают посредством захватного устройства 6, в частности, посредством антропоморфного робота 9, который размещает ее на станции прикрепления этикеток изделия.
Если невулканизированную шину 100 выдают в систему с автоматическим управлением, например, предусмотрено размещение невулканизированной шины в непоказанной удерживающей корзине, которая, например, по меньшей мере частично, образована удерживающей стенкой, имеющей форму усеченного конуса.
Удерживающая корзина может содержать дополнительный датчик, выполненный с возможностью обнаружения дополнительного края невулканизированной шины на дополнительной линии обнаружения, задаваемой самим дополнительным датчиком.
Для манипулирования шинами предусмотрены обеспечение первого перемещения линии 4 обнаружения и невулканизированной шины 100 друг относительно друга и получение данных о положении первого края 106 невулканизированной шины 100 относительно базы 5 отсчета. После этого предусмотрены обеспечение второго перемещения линии 4 обнаружения и невулканизированной шины 100 друг относительно друга и получение данных о положении второго края 107 невулканизированной шины 100 относительно базы 5 отсчета.
Первый край и второй край предпочтительно представляют собой края невулканизированной шины 100, которые наиболее удалены от центра в аксиальном направлении и каждый из которых расположен на борте 103, 104 соответственно с противоположных сторон относительно плоскости 102, средней в аксиальном направлении.
Согласно возможному варианту осуществления для обеспечения первого относительного перемещения линию обнаружения и/или невулканизированную шину 100 перемещают параллельно аксиальному направлению невулканизированной шины 100. Линию обнаружения предпочтительно перемещают внутри невулканизированной шины.
Согласно возможному варианту осуществления для обеспечения второго относительного перемещения линию обнаружения и/или невулканизированную шину 100 перемещают параллельно аксиальному направлению невулканизированной шины 100. Линию обнаружения предпочтительно перемещают внутри невулканизированной шины 100.
После получения данных о положении первого и второго краев предусмотрены захват невулканизированной шины 100 с учетом положений первого и второго краев 106-107 относительно базы 5 отсчета, например, посредством захватного устройства 6 и предпочтительно определение положения геометрического центра С невулканизированной шины относительно базы 5 отсчета исходя из положения первого и второго краев.
Согласно возможному варианту осуществления невулканизированную шину 100 захватывают посредством радиально раздвижного зажима 7 с учетом положения первого и второго краев 106, 107 относительно базы 5 отсчета. В этом случае захват невулканизированной шины 100 включает радиальное раздвигание радиально раздвижного зажима 7 внутри невулканизированной шины 100 в зависимости от положения первого края 106 и второго края 107.
Блок 10 управления предпочтительно запрограммирован для:
- обеспечения первого перемещения линии 4 обнаружения и невулканизированной шины 100 друг относительно друга и получения данных о положении первого края 106 относительно базы 5 отсчета;
- обеспечения второго перемещения линии 4 обнаружения и невулканизированной шины 100 друг относительно друга и получения данных о положении второго края 107 относительно базы 5 отсчета;
- приведения в действие захватного устройства, захватывающего невулканизированную шину 100, с учетом положений первого и второго краев 106-107 относительно базы 5 отсчета.
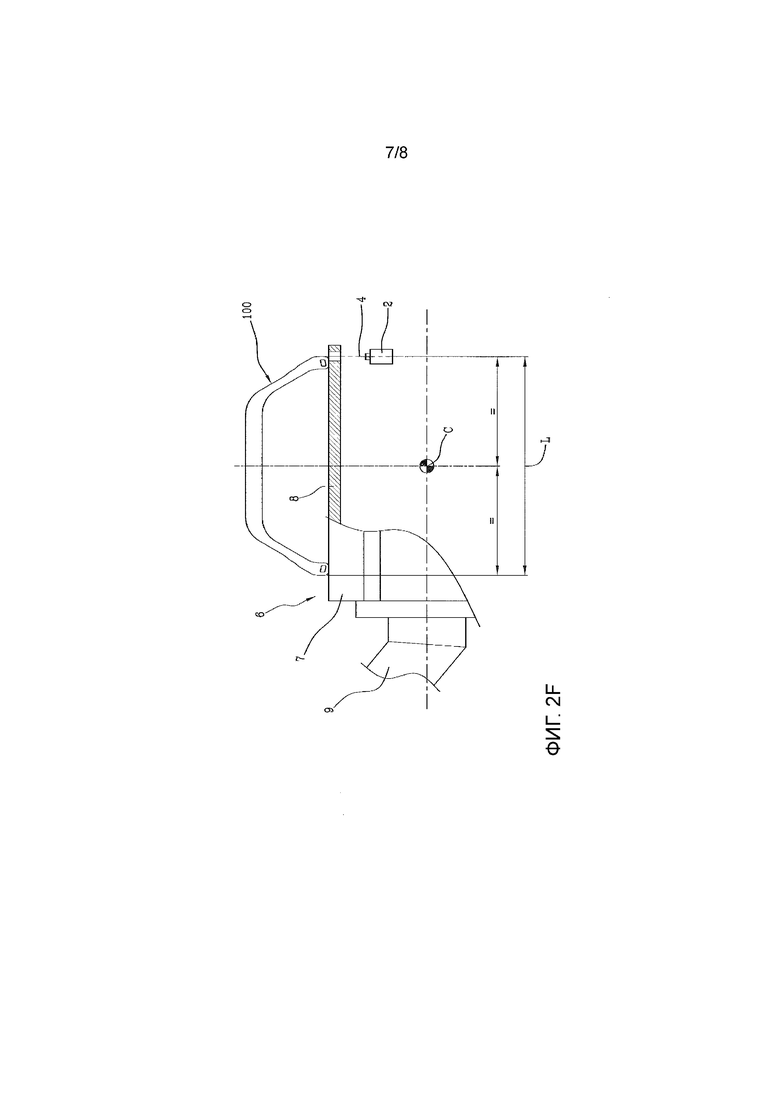
Согласно возможному варианту осуществления дополнительно предусмотрено вычисление расстояния L между первым и вторым краями 106, 107. Согласно возможному варианту осуществления блок 10 управления запрограммирован для такого вычисления.
Блок 10 управления дополнительно запрограммирован для определения геометрического центра С путем вычислений, то есть для определения положения геометрического центра С невулканизированной шины относительно базы 5 отсчета исходя из положения первого и второго краев, например, исходя из расстояния L между первым и вторым краями 106, 107.
Согласно возможному варианту осуществления блок 10 управления запрограммирован для перемещения зажима внутри невулканизированной шины для обеспечения первого и второго относительных перемещений и для радиального раздвигания радиально раздвижного зажима 7 внутри невулканизированной шины 100 с учетом положения первого края 106 и второго края 107.
Согласно возможному варианту осуществления дополнительно предусмотрено определение положения невулканизированной шины в пространстве исходя из положения первого и второго краев, из положения геометрического центра ʺСʺ и из предварительно заданных данных, относящихся к профилю шины. В частности, положение геометрического центра ʺCʺ невулканизированной шины 100 определяют относительно захватного устройства 6, предпочтительно относительно радиально раздвижного зажима 7.
Перед захватом невулканизированной шины 100 предусмотрено обеспечение движения позиционирования захватного устройства 6, предпочтительно радиально раздвижного зажима 7, и невулканизированной шины 100 друг относительно друга для достижения заданного взаимного расположения при захвате, при котором захватное устройство 6 выступает на заданное расстояние ʺhʺ от первого или второго края 106, 107.
Согласно возможному варианту осуществления блок 10 управления запрограммирован для обеспечения такого относительного движения позиционирования.
Кроме того, блок 10 управления запрограммирован для манипулирования невулканизированной шиной во время вспомогательных операций, описанных выше.
В частности, в случае обеспечения опоры на удерживающей корзине невулканизированную шину перемещают со скоростью опоры параллельно аксиальному направлению невулканизированной шины для сближения с дополнительной линией обнаружения, расположенной, например, параллельно удерживающей стенке удерживающей корзины. Блок 10 управления запрограммирован для укладки невулканизированной шины в удерживающую корзину в зависимости от положения наружного края невулканизированной шины 100, размещаемой на боковине 108.
Получение данных о положении, по меньшей мере, одного края шины описано в дальнейшем для первого края 106 невулканизированной шины 100 со ссылкой на фиг.2а-2b.
Это получение данных включает первую операцию, на которой обеспечивают первое перемещение линии 4 обнаружения, задаваемой датчиком 2, и невулканизированной шины 100 друг относительно друга, которое предназначено для перехвата. При этом первом относительном перемещении для перехвата линия 4 обнаружения имеет первую регулируемую скорость Vi1 перехвата относительно невулканизированной шины 100, имеющую направление, адаптированное для перехвата/пересечения первого края 106. Первая регулируемая скорость Vi1 перехвата предпочтительно параллельна аксиальному направлению невулканизированной шины 100.
Для обеспечения регулируемой скорости Vi1 перехвата датчик 2 перемещают внутри невулканизированной шины 100 с первой скоростью Vav1 подвода параллельно аксиальному направлению невулканизированной шины 100.
После этого первое относительное перемещение для перехвата продолжают до тех пор, пока линия 4 обнаружения не пересечет первый край 106 невулканизированной шины 100.
После этого изменяют направление первого относительного перемещения для перехвата, тем самым обеспечивая первое перемещение линии 4 обнаружения и невулканизированной шины 100 друг относительно друга, которое предназначено для обнаружения. При данном первом относительном перемещении для обнаружения линия 4 обнаружения имеет первую регулируемую скорость Vr1 обнаружения относительно невулканизированной шины 100, имеющую противоположное направление и меньшую абсолютную величину по отношению к первой регулируемой скорости Vi1 перехвата.
Первое относительное перемещение для обнаружения продолжают до тех пор, пока линия 4 обнаружения снова не пересечет первый край 106, при этом определяется его положение относительно базы 5 отсчета.
Для обеспечения первой регулируемой скорости Vr1 обнаружения захватное устройство 6 и, следовательно, датчик 2, составляющий одно целое с ним, перемещают внутри невулканизированной шины с первой скоростью Var1 отвода параллельно аксиальному направлению невулканизированной шины.
Первая скорость Var1 отвода предпочтительно имеет противоположное направление и меньшую абсолютную величину по отношению к первой скорости Vav1 подвода.
Получение данных о положении первого края 106 включает сохранение данных о таком положении относительно базы 5 отсчета.
В случае радиально раздвижного зажима 7 его перемещают вдоль аксиального направления его протяженности с первой скоростью Vav1 подвода и с первой скоростью Var1 отвода посредством антропоморфного робота 9. Кроме того, радиально раздвижной зажим 7 и, следовательно, датчик 2 перемещают внутри невулканизированной шины.
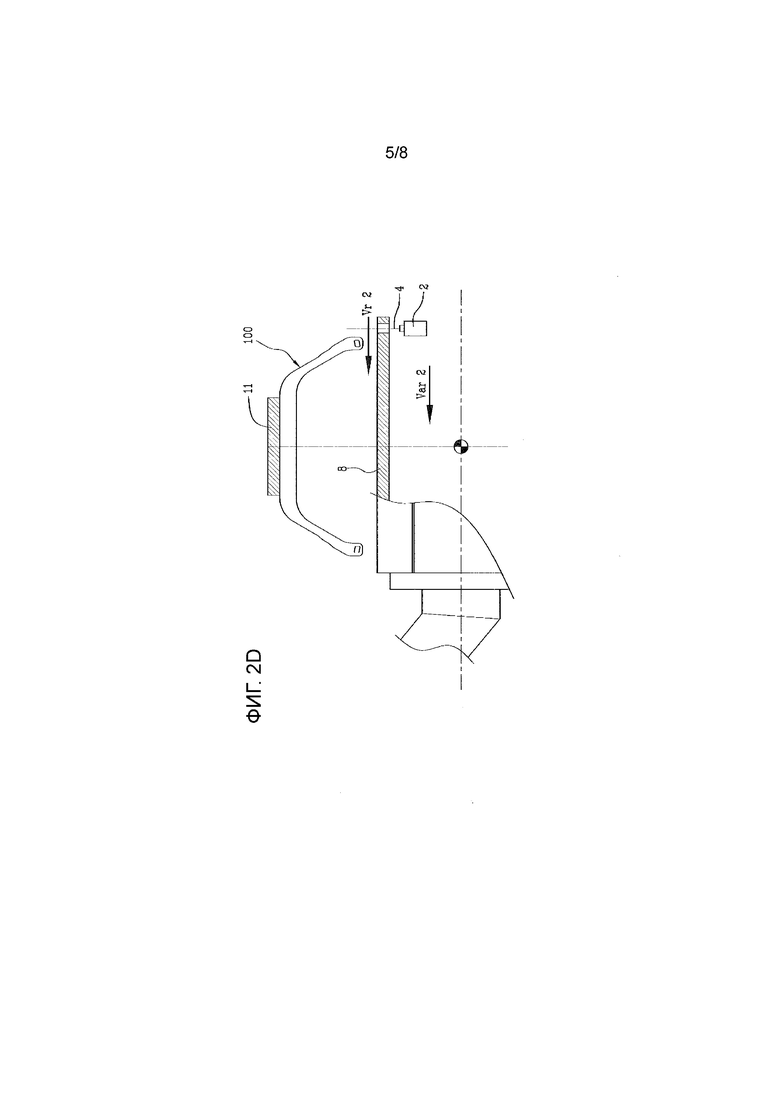
Получение данных о положении второго края 107 шины описано в дальнейшем со ссылкой на фиг.2с-2d. В частности, операции, выполняемые для первого края 106, повторяют для второго края 107 при сохранении данных как о положении первого края 106, так и о положении второго края 107 относительно базы 5 отсчета.
В частности, предусмотрено обеспечение второго относительного перемещения для перехвата, при котором линия 4 обнаружения имеет вторую регулируемую скорость Vi2 перехвата относительно невулканизированной шины 100, имеющую направление, адаптированное для перехвата/пересечения второго края 107. Вторая регулируемая скорость Vi2 перехвата предпочтительно равна первой регулируемой скорости Vi1 перехвата.
Согласно возможному варианту осуществления вторая регулируемая скорость Vi2 перехвата параллельна аксиальному направлению невулканизированной шины 100.
В случае устройства 1 манипулирования, описанного выше, для обеспечения второй регулируемой скорости Vi2 перехвата захватное устройство 6 и, следовательно, датчик 2, составляющий одно целое с ним, перемещают внутри невулканизированной шины со скоростью Vav2 подвода параллельно аксиальному направлению невулканизированной шины.
После этого второе относительное перемещение для перехвата продолжают до тех пор, пока линия 4 обнаружения не пересечет второй край 107, и направление второго относительного перемещения для перехвата изменяют, обеспечивая тем самым второе перемещение линии обнаружения и невулканизированной шины 100 друг относительно друга, предназначенное для обнаружения. При данном втором относительном перемещении для обнаружения линия 4 обнаружения имеет вторую регулируемую скорость Vr2 обнаружения относительно невулканизированной шины 100, имеющую противоположное направление и меньшую абсолютную величину по отношению ко второй регулируемой скорости Vi2 перехвата.
Вторая регулируемая скорость Vr2 обнаружения предпочтительно равна первой регулируемой скорости Vr1 обнаружения.
Второе относительное перемещение для обнаружения продолжают до тех пор, пока линия 4 обнаружения снова не пересечет второй край 107, при этом определяется его положение относительно базы 5 отсчета.
Для обеспечения второй регулируемой скорости Vr2 обнаружения захватное устройство 6 и, следовательно, датчик 2 перемещают внутри невулканизированной шины 100 со второй скоростью Var2 отвода параллельно аксиальному направлению невулканизированной шины 100.
Вторая скорость Var2 отвода предпочтительно имеет противоположное направление и меньшую абсолютную величину по отношению ко второй скорости Vav2 подвода.
Получение данных о положении второго края 107 включает сохранение данных о таком положении относительно базы 5 отсчета.
В случае радиально раздвижного зажима 7 его перемещают вдоль аксиального направления его протяженности со второй скоростью Vav2 подвода и со второй скоростью Var2 отвода посредством антропоморфного робота 9. Кроме того, радиально раздвижной зажим 7 и, следовательно, датчик 2 перемещают внутри невулканизированной шины.
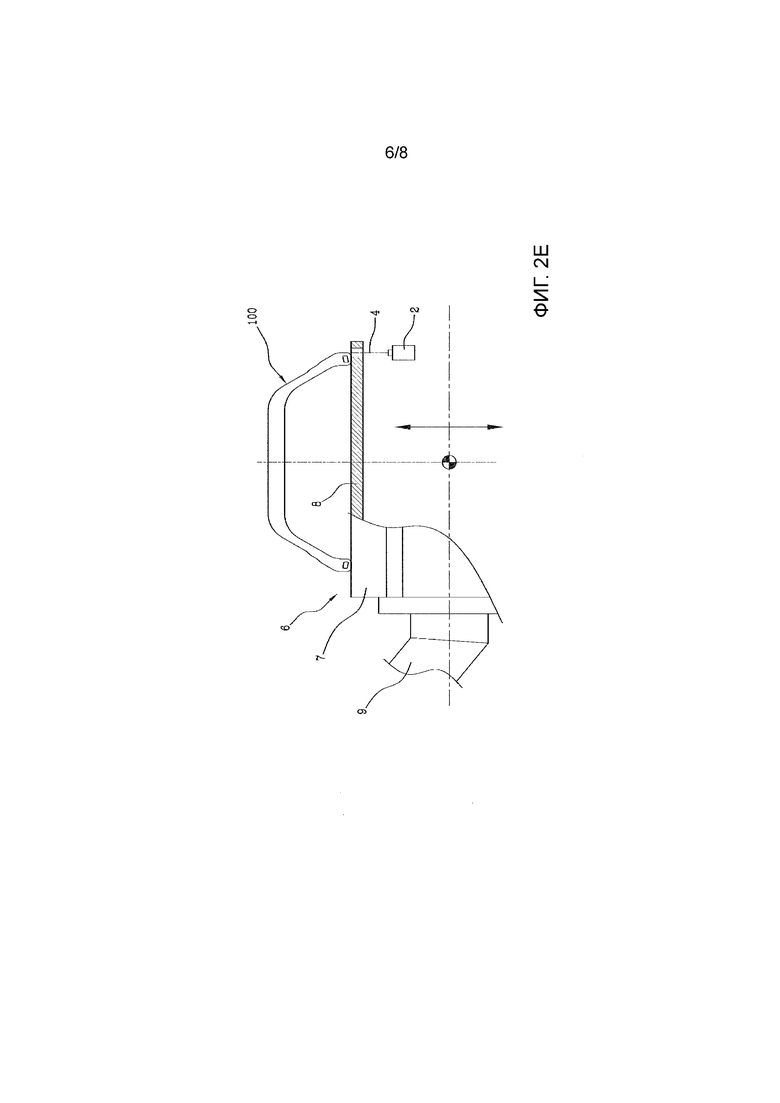
Фиг.2е схематически показывает момент, когда после получения данных о положении первого и второго краев невулканизированную шину 100 захватывают с учетом положений первого и второго краев 106-107 относительно базы 5 отсчета при последующем удалении транспортно-загрузочного устройства 11. В частности, радиально раздвижной зажим 7 раздвинут внутри невулканизированной шины 100.
Фиг.2f показывает завершающий момент, когда невулканизированная шина 100 захвачена захватным устройством 6, в частности, посредством радиально раздвижного зажима 7.
В вышеприведенном описании конкретно рассматривались способ и устройство манипулирования невулканизированными шинами. Специалист в данной области техники может адаптировать идеи настоящего изобретения также для манипулирования отформованными в пресс-форме и вулканизированными шинами без отхода от объема охраны, обеспечиваемого формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ СБОРКИ ШИН | 2015 |
|
RU2689748C2 |
| УСТРОЙСТВО И СПОСОБ СБОРКИ ШИН ДЛЯ КОЛЕС ТРАНСПОРТНЫХ СРЕДСТВ | 2015 |
|
RU2684096C2 |
| СПОСОБ И ЛИНИЯ ДЛЯ КОНТРОЛЯ ШИН КОЛЕС ТРАНСПОРТНЫХ СРЕДСТВ | 2017 |
|
RU2729453C2 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА ШИН ДЛЯ КОЛЕС ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2682059C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ШИН ДЛЯ КОЛЕС ТРАНСПОРТНЫХ СРЕДСТВ | 2020 |
|
RU2814919C2 |
| СПОСОБ, ЛИНИЯ ВУЛКАНИЗАЦИИ, УСТРОЙСТВО ОБРАБОТКИ ДАННЫХ И СООТВЕТСТВУЮЩИЙ ЭЛЕКТРОННЫЙ БЛОК ДЛЯ УПРАВЛЕНИЯ ВУЛКАНИЗАЦИОННЫМИ УСТРОЙСТВАМИ ДЛЯ ИЗГОТОВЛЕНИЯ ШИН | 2017 |
|
RU2752344C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ШИН | 2016 |
|
RU2722779C2 |
| УСТРОЙСТВО И СПОСОБ СБОРКИ ШИН ДЛЯ КОЛЕС ТРАНСПОРТНЫХ СРЕДСТВ | 2015 |
|
RU2693161C2 |
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ ШТАНГАМИ БУРОВОЙ УСТАНОВКИ | 2014 |
|
RU2636334C2 |
| ПНЕВМАТИЧЕСКАЯ ШИНА | 2010 |
|
RU2508206C2 |
Изобретение относится к способу манипулирования шинами. Техническим результатом является автоматизация вспомогательных операций без увеличения длительности пауз. Технический результат достигается способом манипулирования шинами, который включает обеспечение первого перемещения линии (4) обнаружения и шины (100) относительно друг друга для получения данных о положении первого края (106) шины (100) относительно базы (5) отсчета посредством линии (4) обнаружения. Обеспечение второго перемещения линии (4) обнаружения и шины (100) относительно друг друга для получения данных о положении второго края (107) шины (100) относительно базы (5) отсчета посредством линии (4) обнаружения. Позиционирование захватного устройства (6) и захват шины (100) посредством захватного устройства (6) с учетом положений указанных первого и второго краев (107) относительно базы (5) отсчета. 2 н. и 18 з.п. ф-лы, 8 ил.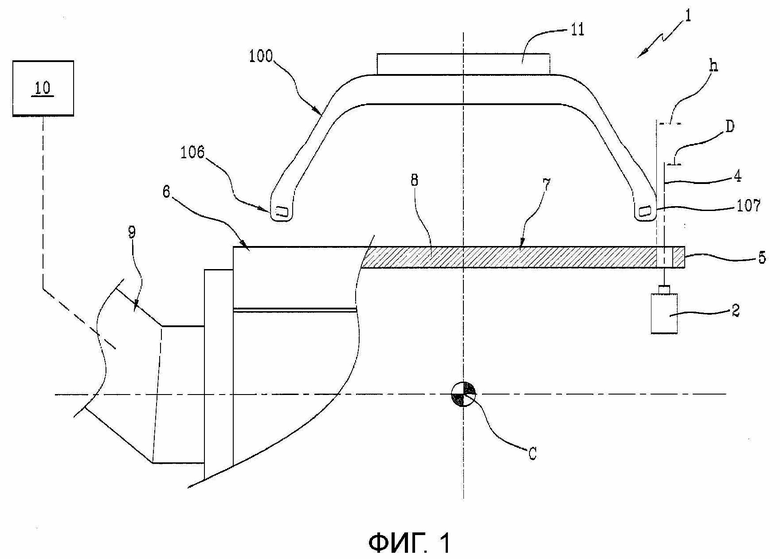
1. Способ манипулирования шинами, включающий:
обеспечение первого перемещения линии (4) обнаружения и шины (100) относительно друг друга для получения данных о положении первого края (106) шины (100) относительно базы (5) отсчета посредством линии (4) обнаружения;
обеспечение второго перемещения линии (4) обнаружения и шины (100) относительно друг друга для получения данных о положении второго края (107) шины (100) относительно базы (5) отсчета посредством линии (4) обнаружения;
позиционирование захватного устройства (6) и захват шины (100) посредством захватного устройства (6) с учетом положений указанных первого и второго краев (107) относительно базы (5) отсчета.
2. Способ манипулирования шинами по п.1, при котором для обеспечения первого и/или второго относительных перемещений линию (4) обнаружения и/или шину (100) перемещают параллельно аксиальному направлению (101) шины (100).
3. Способ манипулирования шинами по п.2, при котором линия (4) обнаружения расположена перпендикулярно аксиальному направлению (101).
4. Способ манипулирования шинами по п.2 или 3, при котором для обеспечения первого и/или второго относительных перемещений линию (4) обнаружения и/или шину (100) перемещают по существу в соответствии с аксиальным направлением (101) шины (100).
5. Способ манипулирования шинами по любому из предшествующих пунктов, при котором первый край (106) и второй край (107) представляют собой края шины (100), наиболее удаленные от центра в аксиальном направлении.
6. Способ манипулирования шинами по любому из предшествующих пунктов, при котором каждый из первого края (106) и второго края (107) расположен на борте соответственно с противоположных сторон относительно плоскости (102) шины (100), средней в аксиальном направлении.
7. Способ манипулирования шинами по любому из предшествующих пунктов, включающий определение геометрического центра (С) шины (100) путем вычислений относительно базы (5) отсчета исходя из расстояния (L) между первым и вторым краями (106, 107).
8. Способ манипулирования шинами по п.7, включающий определение положения шины (100) в пространстве исходя из положения первого и второго краев (106, 107), из положения геометрического центра (С) и из предварительно заданных данных, относящихся к теоретическому профилю шины.
9. Способ манипулирования шинами по любому из предшествующих пунктов, при котором захватное устройство (6) составляет одно целое с линией (4) обнаружения и определяет базу (5) отсчета.
10. Способ манипулирования шинами по любому из предшествующих пунктов, при котором позиционирование захватного устройства (6) включает обеспечение движения позиционирования захватного устройства (6) и шины (100) относительно друг друга для достижения заданного взаимного расположения при захвате, при котором захватное устройство (6) выступает на заданное расстояние (h) от первого или второго края (106, 107), перед захватом шины (100).
11. Способ манипулирования шинами по любому из предшествующих пунктов, при котором захватное устройство (6) включает в себя радиально раздвижной зажим (7), содержащий базу (5) отсчета и удерживаемый концом антропоморфного робота (9), выполненного с возможностью перемещения относительно шины (100), при этом линия (4) обнаружения расположена на сегменте (8) радиально раздвижного зажима (7), причем захват шины (100) включает раздвигание радиально раздвижного зажима (7) внутри шины (100) в зависимости от положения первого края (106) и второго края (107).
12. Способ манипулирования шинами по любому из предшествующих пунктов, при котором обеспечение первого и/или второго относительных перемещений включает обеспечение относительного перемещения для перехвата, при котором линия (4) обнаружения имеет регулируемую скорость (Vi1, Vi2) перехвата относительно шины (100), имеющую направление, адаптированное для перехвата соответственно первого края (106) и/или второго края (107).
13. Способ манипулирования шинами по п.12, при котором обеспечение первого или второго относительного перемещения включает:
продолжение относительного перемещения для перехвата до тех пор, пока линия (4) обнаружения не пересечет первый край (106) или второй край (107) шины (100);
изменение направления относительного перемещения для перехвата посредством обеспечения перемещения линии (4) обнаружения и шины (100) относительно друг друга, предназначенного для обнаружения, при этом линия (4) обнаружения имеет регулируемую скорость (Vr1, Vr2) обнаружения относительно шины (100), имеющую противоположное направление и меньшее абсолютное значение по отношению к регулируемой скорости (Vi1, Vi2) перехвата;
продолжение относительного перемещения для обнаружения до тех пор, пока линия (4) обнаружения снова не пересечет первый край (106) или второй край (107), обеспечивая определение его положения относительно базы (5) отсчета.
14. Способ манипулирования шинами по любому из предшествующих пунктов, включающий:
выполнение по меньшей мере одной вспомогательной операции на захваченной шине (100) с учетом положений первого и второго краев (106, 107) относительно базы (5) отсчета, при этом вспомогательная операция включает по меньшей мере одну операцию, выбранную из:
нанесения штрихового кода,
прикрепления одной или более этикеток изделия,
выдачи шины в систему с автоматическим управлением.
15. Устройство (1) манипулирования шинами (100), содержащее:
захватное устройство (6), включающее в себя по меньшей мере один датчик (2), выполненный с возможностью обнаружения края (106, 107) шины (100) на линии (4) обнаружения, задаваемой самим датчиком, при этом датчик (2) расположен на заданном расстоянии относительно базы (5) отсчета;
блок (10) управления, функционально связанный с захватным устройством (6) и запрограммированный для выполнения способа манипулирования шинами (100) по любому из пп.1-14.
16. Устройство (1) манипулирования по п.15, в котором захватное устройство (6) включает в себя радиально раздвижной зажим (7), предусмотренный с множеством радиально раздвигаемых сегментов (8) и удерживаемый концом антропоморфного робота (9).
17. Устройство (1) манипулирования по п.16, в котором блок (10) управления запрограммирован для:
перемещения радиально раздвижного зажима (7) внутри шины для обеспечения первого и второго относительных перемещений;
раздвигания радиально раздвижного зажима (7) внутри шины (100) в зависимости от положения первого края и второго края.
18. Устройство (1) манипулирования по п.16 или 17, в котором датчик (2) расположен на сегменте (8) радиально раздвижного зажима (7) так, что линия (4) обнаружения расположена перпендикулярно сегменту (8).
19. Устройство (1) манипулирования по любому из пп.16-18, в котором датчик (2) расположен на сегменте (8) на расстоянии (D) от того свободного конца радиально раздвижного зажима (7), который определяет базу (5) отсчета на самом радиально раздвижном зажиме (7).
20. Устройство (1) манипулирования по любому из пп.15-19, в котором блок управления запрограммирован для обеспечения движения позиционирования захватного устройства (6) и шины (100) относительно друг друга для достижения заданного взаимного расположения при захвате, при котором захватное устройство (6) выступает на заданное расстояние (h) от первого или второго края (106, 107), перед захватом шины (100).
| US 20090061099 A1, 05.03.2009 | |||
| US 5631028 A, 20.05.1997 | |||
| US 7943201 B2, 17.05.2011 | |||
| УСТРОЙСТВО для ИЗМЕРЕНИЯ РАЗМЕРОВ ТЕЛ | 0 |
|
SU316924A1 |
| WO 2013182772 A1, 12.12.2013. | |||

