ОБЛАСТЬ ТЕХНИКИ
Это изобретение относится к электроактивным полимерным приводам.
УРОВЕНЬ ТЕХНИКИ
Электроактивные полимеры (ЭАП) представляют собой перспективный класс материалов в области электрочувствительных материалов. ЭАП могут работать как датчики или приводы, и при изготовлении им могут быть легко приданы различные формы, позволяющие простую интеграцию в разнообразные системы.
Были разработаны материалы с характеристиками, такими как механическое напряжение и деформация активации привода, которые значительно улучшились за последние десять лет. Технологические риски были снижены до допустимых уровней для разработки продукта, и ЭАП приобрели возрастающий интерес в коммерческом и техническом плане. Преимущества ЭАП включают в себя малую мощность, миниатюрный форм-фактор, гибкость, бесшумную работу, точность, возможность высокого разрешения, быстрый отклик и циклическую активацию привода.
Улучшенные рабочие характеристики и особые преимущества материала ЭАП служат основанием для их пригодности для новых применений.
ЭАП-устройство может использоваться в любом применении, в котором желательным является небольшая величина перемещения компонента или элемента на основе электрической активации привода. Аналогичным образом, технология может использоваться для обнаружения малых движений. Это изобретение относится, в частности, к приводам.
Использование ЭАП делает возможными функции, которые не были возможны прежде, или предлагает большое преимущество перед обычными решениями для приводов благодаря комбинации относительно большой деформации и силы в небольшом объеме или тонком форм-факторе по сравнению с обычными приводами. ЭАП также обеспечивают бесшумную работу, точное электронное управление, быстрый отклик и большой спектр возможных частот активации привода, такой как 0-1 МГц, как правило ниже 20 кГц.
Устройства, использующие электроактивные полимеры, могут быть подразделены на управляемые полем и ионно-управляемые материалы.
Примеры управляемых полем ЭАП включают в себя пьезоэлектрические полимеры, электрострикционные полимеры (такие как полимеры-релаксоры на основе PVDF) и диэлектрические эластомеры. Другие примеры включают в себя электрострикционные привитые полимеры, электрострикционную бумагу, электреты, электровязкоупругие эластомеры и жидкокристаллические эластомеры.
Примерами ионно-управляемых ЭАП являются сопряженные/проводящие полимеры, ионные полимер-металлические композиты (IPMC) и углеродные нанотрубки (CNT). Другие примеры включают в себя ионные полимерные гели.
Управляемые полем ЭАП приводятся в действие электрическим полем через прямую электромеханическую связь. Они обычно требуют сильные поля (вольты на метр), но низкие токи. Полимерные слои обычно являются тонкими, чтобы поддерживать управляющее напряжение насколько возможно низким.
Ионные ЭАП приводятся в действие посредством индуцированного электрическим полем переноса ионов и/или растворителя. Они обычно требуют низких напряжений, но сильных токов. Им требуется жидкая/гелевая электролитная среда (хотя некоторые системы материалов также могут работать с использованием твердых электролитов).
Оба класса ЭАП имеют несколько подклассов, каждый из которых имеет собственные преимущества и недостатки.
Первым примечательным подклассом управляемых полем ЭАП, являются пьезоэлектрические и электрострикционные полимеры. В то время как электромеханические рабочие характеристики традиционных пьезоэлектрических полимеров ограничены, прорыв в улучшении этих рабочих характеристик привел к полимерам-релаксорам PVDF, которые проявляют самопроизвольную электрическую поляризацию (управляемое полем выравнивание). Эти материалы могут быть предварительно деформированы для улучшения рабочих характеристик в направлении деформации (предварительная деформация приводит к более хорошему молекулярному выравниванию). Обычно используются металлические электроды, поскольку деформации обычно находятся в умеренном режиме (1-5%). Также могут использоваться другие типы электродов (такие как проводящие полимеры, масла, гели или эластомеры на основе технического углерода и т.д.). Электроды могут быть непрерывными или сегментированными.
Другим подклассом управляемых полем ЭАП является подкласс диэлектрических эластомеров. Тонкая пленка этого материала может быть помещена между гибкими электродами, формируя конденсатор с параллельными пластинами. В случае диэлектрических эластомеров напряжение Максвелла, вызванное приложенным электрическим полем, приводит к напряжению на пленке, заставляя ее сжаться по толщине и расшириться по площади. Рабочие характеристики деформации, как правило, увеличиваются посредством предварительной деформации эластомера (требуется рамка для поддержания предварительной деформации). Деформации могут быть значительными (10-300%). Это также ограничивает тип электродов, которые могут использоваться: для низких и умеренных деформаций могут рассматриваться металлические электроды и проводящие полимерные электроды, для режима высоких деформаций обычно используются масла, гели или эластомеры на основе технического углерода.
Первым примечательным подклассом ионных ЭАП являются ионные полимер-металлические композиты (IPMC). IPMC состоят из мембраны из набухающего при растворении ионообменного полимера, нанесенной между двумя тонкими электродами на основе металла или углерода, и требуют использования электролита. Типичными материалами электрода являются Pt, Gd, CNT, CP, Pd. Типичными электролитами являются водные растворы Li+ и Na+. При приложении поля катионы обычно перемещаются в сторону катода вместе с водой. Это приводит к реорганизации гидрофильных кластеров и к расширению полимера. Деформация в области катода приводит к напряжению в остальной части полимерной матрицы, приводящему к изгибу в сторону анода. Изменение полярности приложенного напряжения меняет направление изгиба. Известными полимерными мембранами являются Nafion® и Flemion®.
Другим примечательным подклассом ионных полимеров являются сопряженные/проводящие полимеры. Привод на сопряженных полимерах обычно состоит из электролита, помещенного между двумя слоями сопряженного полимера. Электролит используется для изменения степени окисления. Когда к полимеру прикладывается потенциал через электролит, электроны добавляются к полимеру или удаляются из полимера, приводя к окислению и восстановлению. Восстановление приводит к сокращению, окисление - к расширению.
В некоторых случаях добавляются тонкопленочные электроды, когда самому полимеру не хватает достаточной проводимости (по размеру). Электролит может представлять собой жидкость, гель или твердый материал (т.е., комплекс высокомолекулярных полимеров и солей металла). Наиболее распространенными спряженными полимерами являются полипиррол (PPy), полианилин (PANi) и политиофен (PTh).
Привод также может быть сформирован из углеродных нанотрубок (CNT), подвешенных в электролите. Электролит формирует двойной слой с нанотрубками, давая возможность инжекции зарядов. Эта инжекция заряда в двойной слой рассматривается как первичный механизм в приводах CNT. CNT действует как конденсатор электрода с зарядом, инжектированным в CNT, который затем уравновешивается электрическим двойным слоем, сформированным движением электролитов к поверхности CNT. Изменение заряда на атомах углерода приводит к изменениям длины связи С-С. В результате может наблюдаться расширение и сокращение отдельной CNT.
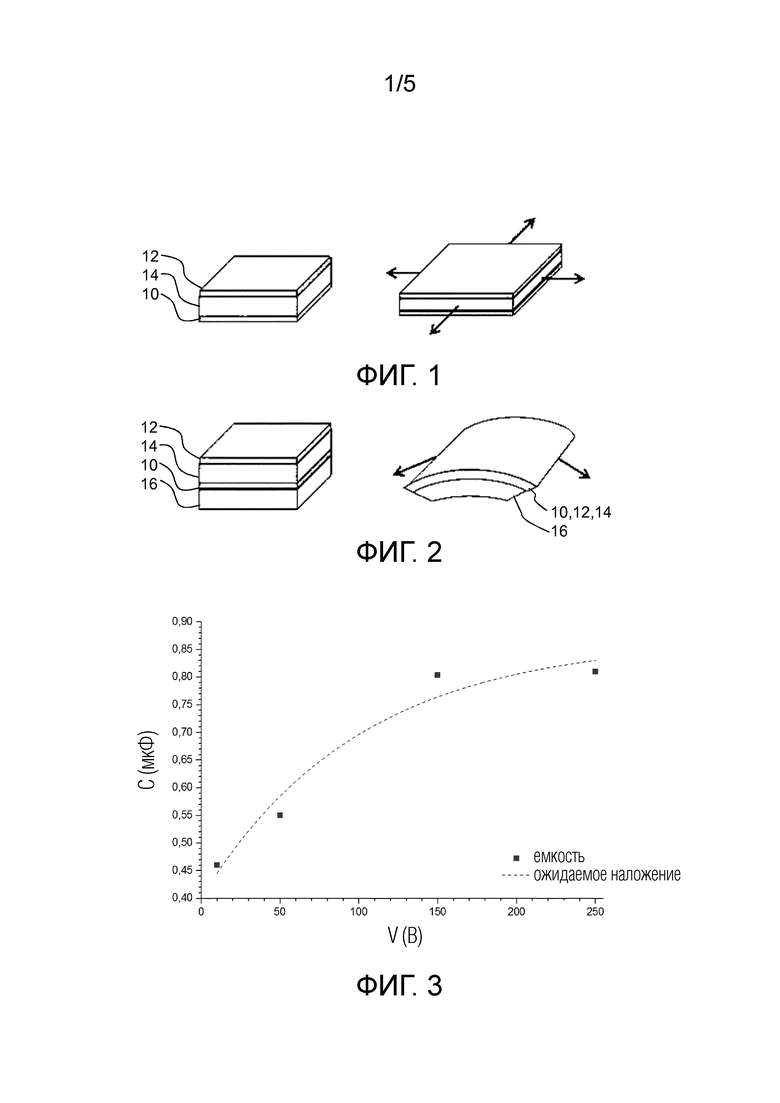
Фиг. 1 и 2 показывают два возможных режима работы для ЭАП-устройства.
Устройство содержит электроактивный полимерный слой 14, помещенный между электродов 10, 12 на противоположных сторонах электроактивного полимерного слоя 14.
Фиг. 1 показывает устройство, которое не зажато. Напряжение используется, чтобы заставить электроактивный полимерный слой расширяться во всех направлениях, как показано.
Фиг. 2 показывает устройство, которое сконструировано таким образом, что расширение возникает только в одном направлении. Устройство поддерживается несущим слоем 16. Напряжение используется, чтобы заставить электроактивный полимерный слой изгибаться или наклоняться.
Совместно электроды, электроактивный полимерный слой и несущий слой могут рассматриваться как составляющие полную электроактивную полимерную структуру.
Природа этого движения, например, является результатом взаимодействия между активным слоем, который расширяется, когда активируется, и пассивным несущим слоем. Чтобы получить асимметричный изгиб вокруг оси, как показано, может быть применена молекулярная ориентация (растяжение пленки), вынуждающая к движению в одном направлении.
Расширение в одном направлении может являться результатом асимметрии в полимере ЭАП, или оно может являться результатом асимметрии в свойствах несущего слоя, или комбинации обеих.
Изменение формы, вызванное электрической стимуляцией ЭАП, таким образом, имеет много полезных применений. Однако стимуляция материала также сопровождается изменением комплексного импеданса, проявляемого устройством привода. В частности, реактивное сопротивление iXC изменяет свое значение в значительной степени вследствие вызванного сокращения толщины (слоя) ЭАП.
Наибольшим воздействием на реактивное сопротивление ЭАП является входная емкость. При моделировании ЭАП-привода как (многослойной) пластины конденсатора емкость может быть приближена следующим образом:
где С - входная емкостью, n - количество внутренних активных ЭАП-слоев, ε0 - диэлектрическая проницаемость вакуума, εr - относительная диэлектрическая проницаемость ЭАП-материала, а и b - длина и ширина ЭАП-слоя (таким образом, а*b = площадь поверхности слоя), и d - толщина ЭАП-слоя. Для слоев, которые не являются прямоугольными, а.b может быть заменено эквивалентным подходящим выражением, представляющим площадь поверхности ЭАП-слоя.
Когда ЭАП-слой электрически стимулируется, толщина d сокращается. Также в это время расширяются боковые размеры а и b (т.е., в более общем случае, площадь поверхности увеличивается). Как следствие, увеличивается емкость. Фиг. 3 иллюстрирует соотношение между емкостью (ось y) и прикладываемым постоянным напряжением (ось х) для иллюстративного ЭАП-слоя. Как показано с помощью изображенного графика, в диапазоне управляющих напряжений от 0 В до 250 В наблюдается общее увеличение входной емкости приблизительно на 78%.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Авторами настоящего изобретения было замечено, что описанная выше вариация емкости ЭАП-слоя как функция приложенного напряжения добавляет значительное осложнение в электронное управление устройства привода, поскольку изменяющаяся емкость должна быть компенсирована в подаваемых электрических сигналах, и это требует более сложной управляющей электроники. Это может потребовать либо регулировки напряжения или тока, подаваемого на ЭАП-слой, в режиме реального времени по мере возникновения деформации, либо в случае, когда устройство заряжается только один раз (с использованием схемы управления "выборки и сохранения"), может потребоваться заранее учитывать получаемое в результате изменение емкости и соответствующим образом прикладывать начальное зарядное напряжение. В любом случае учет дополнительной зависимости требует вспомогательной управляющей электроники, которая увеличивает стоимость, сложность и габариты устройства ЭАП-привода.
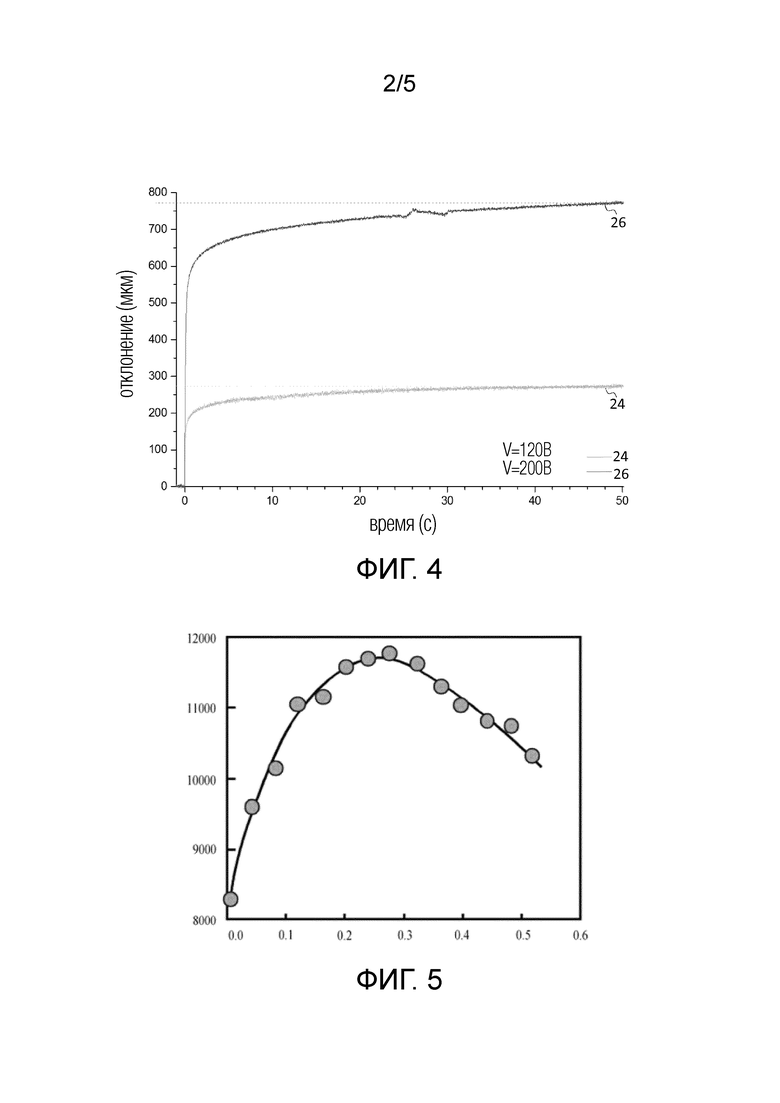
Усугублением этого осложнения является дополнительное характерное поведение электрически стимулируемых ЭАП-слоев, при котором ЭАП-материал проявляет задержку при достижении своей окончательной позиции отклонения. Это проиллюстрировано на фиг. 4, которая показывает соотношение между отклонением ЭАП-слоя (ось у) и временем (ось х) для иллюстративного ЭАП-материала, стимулируемого при двух разных иллюстративных напряжениях: 120 В (24) и 200 В (26). Отклонение показано в микрометрах, и время в секундах.
Из графика можно заметить, что даже после периода в 40 секунд ЭАП-слой еще не достиг своего окончательного отклонения ни для стимуляции 120 В, ни для стимуляции 200 В. Кроме того, степень задержки становится больше для более высоких управляющих напряжений.
По меньшей мере часть показанной задержки относится просто к внутренним физическим процессам релаксации полимера, которые по своей природе являются очень медленными. Однако задержка усиливается описанным выше отношением емкость-деформация. ЭАП-слой медленно приближается к своей окончательной позиции отклонения, таким образом, емкость слоя продолжает соответственно увеличиваться. В свою очередь, это требует продолжения зарядки электроактивного полимерного материала или диэлектрика, что само по себе тогда приводит к дополнительному отклонению ЭАП (поскольку напряженность электрического поля в ЭАП-слое увеличивается).
Дополнительным недостатком этого поведения является необходимое электрическое управление непостоянной емкостной нагрузкой. Вследствие изменяющейся емкости необходимо не только, чтобы ЭАП-привод был заряжен после начальной активации, но чтобы дополнительный ток непрерывно подавался для увеличения заряда по мере увеличения входной емкости устройства. Это требует более сложной управляющей электроники.
Это имеет особое значение, если к ЭАП-приводу адресуются в соответствии с управляющей схемой "выборки и сохранения", используемой, например, в матричной адресации массива ЭАП. В такой схеме ЭАП только кратковременно соединяется с источником напряжения (напряжение "выбирается") и затем является изолированным в течение большего времени управления. В этом случае ЭАП просто "сохраняет" фиксированное количество заряда. В этом случае любые изменения емкости во время управления приведут к "некорректному" (или непреднамеренному) окончательному напряжению, поданному на устройство, и, следовательно, к неправильной окончательной деформации (поскольку напряжение изменится с изменением емкости для фиксированного заряда).
С учетом упомянутых выше недостатков авторы изобретения выявили потребность в устройстве ЭАП-привода, способном обеспечивать электрически стимулируемую активацию привода, в котором устранены или предотвращены сопутствующие осложнения, связанные с зависящей от деформации емкостью.
Изобретение, определенное посредством независимых пунктов формулы изобретения, нацелено на выполнение упомянутой выше потребности. Зависимые пункты формулы изобретения определяют предпочтительные варианты осуществления.
Согласно этому в соответствии с аспектом изобретения обеспечен элемент привода, проявляющий свойство емкости и содержащий:
электроактивный полимерный материал, который выполнен с возможностью деформироваться в зависимости от магнитуды приложенного электрического поля; и
средство компенсации емкости, выполненное с возможностью по меньшей мере частично возмещать изменения упомянутой емкости, вызванные деформацией элемента привода.
Изобретение основано на принципе компенсации известной вариации емкости с состоянием активации "заранее" посредством адаптации собственных присущих элементу привода электрических свойств. Обеспечен элемент привода, имеющий средство компенсации емкости, спроектированное для манипуляции или поправки проявляемой емкости элемента привода, чтобы частично или полностью скорректировать или возместить какую-либо вариацию, вызванную при стимуляции деформации привода. Средство компенсации емкости выполнено с возможностью производить регулировку емкости элемента привода, чтобы по меньшей мере частично возместить изменения упомянутой емкости, вызванные деформацией элемента привода. Результатом является элемент привода, выполненный с возможностью проявлять в значительной степени однородную или постоянную емкость независимо от степени его деформации. Это также означает, что задержка достижения приводом своей окончательной позиции отклонения (проиллюстрировано на фиг. 4) может быть значительно сокращена.
Средство компенсации емкости может принимать разнообразные формы. Однако в целом оно содержит использование одного или более материалов, имеющих электрические свойства, которые при включении в структуру элемента привода имеют эффект изменения наблюдаемой тенденции или отношения между проявляемой емкостью элемента привода и одним или более из параметров: степень деформации привода, магнитуда приложенного электрического поля в приводе и приложенный электрический заряд на активных внешних поверхностях элемента привода. В частности, варианты осуществления изобретения могут содержать средство компенсации емкости, выполненное с возможностью реализовать емкость, которая не проявляет заметного изменения в зависимости от деформации, электрического поля и/или приложенного электрического заряда.
Термин "возмещать" использован в смысле, например, "противодействовать", "компенсировать" или "противостоять", и просто подразумевает, что средство компенсации емкости частично или полностью возвращает емкость к уровню, который она имела бы в отсутствие какой-либо электрически вызванной деформации или приложенного электрического поля. Средство компенсации емкости может иметь эффект полной или значительной поддержки, или удержания установленного постоянного значения емкости.
В соответствии по меньшей мере с одним множеством вариантов осуществления средство компенсации емкости выполнено с возможностью возмещать упомянутые изменения емкости посредством сокращения относительной диэлектрической проницаемости по меньшей мере части элемента привода.
Поскольку емкость прямо пропорциональна относительной диэлектрической проницаемости εr (см. уравнение 1 выше) посредством сокращения относительной диэлектрической проницаемости по меньшей мере части привода емкость, проявляемая по меньшей мере в этой части, сокращается. Средство компенсации емкости может быть выполнено с возможностью, например, производить уменьшение проявляемой относительной диэлектрической проницаемости магнитуды, которая варьируется во взаимном соответствии с вариацией емкости, вызванной деформацией привода.
Средство компенсации емкости может быть выполнено с возможностью, например, вызывать уменьшение относительной диэлектрической проницаемости элемента привода в зависимости от одного или более из следующих изменений: увеличение магнитуды приложенного электрического поля, увеличение приложенного электрического заряда, механическая деформация элемента привода. Эта проявляемая зависимость может полностью или частично совпадать с соотношением между емкостью элемента привода (в отсутствие средства компенсации) и одним или более из следующих изменений: увеличение магнитуды приложенного электрического поля, увеличение приложенного электрического заряда и механическая деформация элемента привода.
В соответствии по меньшей мере с одним множеством примеров средство компенсации емкости может содержать компенсирующий материал, который независимо проявляет уменьшение своей емкости в ответ на одно или более из следующих изменений: увеличение магнитуды приложенного электрического поля, увеличение приложенного электрического заряда, механическая деформация элемента привода.
Эта зависимость может полностью, в значительной степени или частично совпадать с соотношением, проявляемым между емкостью элемента привода (в отсутствие средства компенсации), и теми же из этих трех свойств.
В частности, средство компенсации емкости может содержать компенсирующий материал, который независимо проявляет уменьшение эффективной относительной диэлектрической проницаемости.
Компенсирующий материал сам по себе проявляет в этом случае эффективную относительную диэлектрическую проницаемость, которая варьируется в зависимости от одной или более из упомянутых переменных. Когда этот материал включен в тело элемента привода, эта зависимость может быть производить соответствующую поправку емкости, чтобы полностью или частично возместить изменение емкости, вызванное деформацией элемента привода.
В соответствии с этим множеством примеров средство компенсации емкости может содержать множество частиц, сформированных из упомянутого компенсирующего материала, упомянутые частицы встроены в электроактивный полимерный материал. Встроенные частицы могут иметь эффект поправки или отклонения общей проявляемой емкости и/или относительной диэлектрической проницаемости в элементе привода.
Средство компенсации емкости может содержать покрытие, сформированное из упомянутого компенсирующего материала, покрывающее по меньшей мере часть электроактивного полимерного материала. Это может быть обеспечено либо самостоятельно, либо в комбинации с описанными выше встроенными частицами. Покрытие может иметь сходный эффект влияния, отклонения или изменения проявляемого поведения емкости (или относительной диэлектрической проницаемости), чтобы общая проявляемая емкость устройства была в значительной степени постоянной независимо от деформации элемента привода.
Элемент привода может содержать по меньшей мере первый слой электроактивного полимерного материала и по меньшей мере второй слой, содержащий компенсирующий материал. По меньшей мере второй слой компенсирующего материала может быть непосредственно присоединен или размещен по меньшей мере смежным образом со слоем ЭАП-материала. Это может иметь эффект отклонения или поправки общей проявляемой емкости или относительной диэлектрической проницаемости элемента привода.
В соответствии по меньшей мере с дополнительным множеством примеров средство компенсации емкости может содержать материал, который формирует смесь или композит с электроактивным полимерным материалом, смесь или композит проявляют уменьшение своей емкости или уменьшение эффективной относительной диэлектрической проницаемости в ответ на одно или более из следующих изменений: увеличение магнитуды приложенного электрического поля, увеличение приложенного электрического заряда и механическая деформация элемента привода.
Средство компенсации в соответствии с этим множеством примеров само по себе может проявлять или может не проявлять компенсационные электрические свойства, например, емкость или эффективную относительную диэлектрическую проницаемость, которые варьируются в зависимости от деформации привода. Однако, в комбинации с ЭАП-материалом для формирования композита или смеси получаемые в результате композит или смесь действительно проявляют желательные электрические свойства.
Смесь или композит могут проявлять относительную диэлектрическую проницаемость, которая уменьшается в зависимости от деформации, приложенного заряда или приложенного электрического поля. Это может возместить вариацию емкости, вызванную деформацией, в отсутствие средства компенсации. Смесь или композит могут свойственным им образом проявлять емкость, которая имеет тенденцию изменяться в зависимости от приложенного электрического поля или приложенного заряда, в результате чего эта вариация емкости может объединиться с вариацией, вызванной деформацией, чтобы в значительной степени аннулировать или нейтрализовать ее.
Во всех случаях в соответствии с этим множеством примеров элемент привода может содержать или состоять из одного или более слоев упомянутой смеси или композита.
Элемент привода в качестве альтернативы или дополнительно может содержать по меньшей мере первый слой электроактивного полимерного материала и по меньшей мере второй слой, сформированный из упомянутой смеси или композита.
В соответствии с любым из описанных выше примеров и вариантов осуществления дополнительно в элемент привода может быть включен отклоняющий диэлектрическую проницаемость материал, выполненный с возможностью постоянно поправлять относительную диэлектрическую проницаемость по меньшей мере части элемента привода. "Постоянно поправлять" означает вызывать или производить постоянное (статическое) смещение или отклонение относительной диэлектрической проницаемости, проявляемой одной или более частями элемента привода.
Отклоняющий диэлектрическую проницаемость материал в примерах может быть скомбинирован с одним или более из электроактивного полимерного материала и компенсирующего емкость материала (или компенсирующей емкость смеси или композита). Это может быть достигнуто посредством смешивания материалов или посредством обеспечения слоя отклоняющего материала в многослойном элементе привода. Отклоняющий материал в этих случаях не препятствует какой-либо зависимости относительной диэлектрической проницаемости от поля/заряда/деформации, но просто накладывает фиксированное отклонение или смещение, в результате чего относительная диэлектрическая проницаемость начинается на более высоком или более низком уровне и заканчивается на более высоком или более низком уровне.
В конкретных примерах отклоняющий материал может быть смешан или комбинирован по меньшей мере с электроактивным полимерным материалом, чтобы непосредственно изменить базовую или статическую относительную диэлектрическую проницаемость электроактивного полимера.
Эффект наложения фиксированного отклонения или смещения диэлектрической проницаемости может состоять в том, чтобы изменить диапазон напряженностей поля, в котором элемент привода является механически чувствительным. Посредством статического увеличения базовой относительной диэлектрической проницаемости электроактивный полимерный материал может стать чувствительным в более низком диапазоне напряженностей электрического поля (т.е., может деформироваться в ответ на электрические стимулы с более низким напряжением). Это может иметь преимущество в случаях, когда обеспечение или приложение высоких напряжений является не практичным или нежелательным. Например, такая адаптация может увеличить диапазон возможных применений или реализаций ЭАП-привода с автокомпенсацией, позволяя включать его в состав схем с более низким напряжением.
Кроме того, некоторые потенциальные компенсирующие материалы могут проявлять желаемую зависимую от поля диэлектрическую проницаемость только при конкретной напряженности или в конкретном диапазоне напряженностей приложенного электрического поля. Посредством внедрения подходящего отклоняющего диэлектрическую проницаемость материала в элемент привода диапазон напряженностей поля, в котором привод является чувствительным, может быть изменен (как обсуждалось в предыдущем абзаце) таким образом, чтобы точно совпадать с диапазоном напряженностей поля, в которым компенсирующий материал проявляет требуемую зависимую от поля (относительную) диэлектрическую проницаемость.
Элемент привода может содержать по меньшей мере первый слой и второй слой, каждый из первого и второго слоя выполнен с возможностью проявлять емкость или эффективную относительную диэлектрическую проницаемость, которая уменьшается в ответ на одно или более из следующих изменений: увеличение магнитуды приложенного электрического поля, увеличение приложенного электрического заряда и механическая деформация элемента привода, и причем каждый слой выполнен с возможностью проявлять упомянутую уменьшающуюся емкость или эффективную относительную диэлектрическую проницаемость только в своем конкретном диапазоне напряженностей приложенного электрического поля, значений приложенного электрического заряда или механических деформаций.
В более конкретных примерах этот эффект может быть достигнут посредством включения в один или более по меньшей мере из первого и второго слоев отклоняющего диэлектрическую проницаемость материала, выполненного с возможностью постоянно поправлять относительную диэлектрическую проницаемость по меньшей мере части элемента привода.
Посредством использования более чем одного слоя компенсация емкости может быть достигнута в широком диапазоне разных состояний активации и напряженностей электрической стимуляции, даже когда конкретный материал или композит, используемый для компенсации в каждом слое, имеет лишь ограниченный диапазон применимости. Кроме того, такая многослойная структура позволяет легче, дешевле и проще компенсировать подобное логарифмическому отношение между емкостью и приложенным напряжением (показано на фиг. 3). В каждом слое, например, могут использоваться разные материалы или средства компенсации, каждые из которых обеспечивают конкретный уровень или магнитуду отклонения или возмещения емкости. Посредством построения структуры привода, имеющей несколько слоев с разными магнитудами отклонения смещения, которые последовательно активируются по мере деформации привода до все большей и большей степени, может быть без затруднений достигнут заданный шаблон требуемой компенсации емкости.
В соответствии с одним или более множеством примеров элемент привода может содержать по меньшей мере первый слой и второй слой, каждый из первого и второго слоя выполнен с возможностью проявлять емкость или эффективную относительную диэлектрическую проницаемость, которая уменьшается в ответ на разные из следующих изменений: увеличение магнитуды приложенного электрического поля, увеличение приложенного электрического заряда и механическая деформация элемента привода.
Каждый слой может быть выполнен с возможностью проявлять упомянутую уменьшающуюся емкость или эффективную относительную диэлектрическую проницаемость только в своем конкретном диапазоне частот приложенного электрического поля.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Примеры изобретения будут теперь описаны подробно со ссылкой на приложенные схематические чертежи.
Фиг. 1 показывает известное электроактивное полимерное устройство, которое не зажато;
Фиг. 2 показывает известное электроактивное полимерное устройство, которое ограничено подложкой;
Фиг. 3 показывает соотношение между емкостью, проявляемой электроактивным полимером, и приложенным напряжением;
Фиг. 4 показывает отклонение иллюстративного электроактивного полимера как функцию времени для двух разных приложенных напряжений;
Фиг. 5 показывает соотношение между относительной диэлектрической проницаемостью и магнитудой приложенного электрического поля для иллюстративного компенсирующего емкость материала;
Фиг. 6 показывает соотношение между относительной диэлектрической проницаемостью и магнитудой приложенного электрического поля для второго иллюстративного компенсирующего емкость материала;
Фиг. 7 показывает иллюстративный элемент привода, содержащий встроенные частицы компенсирующего емкость материала;
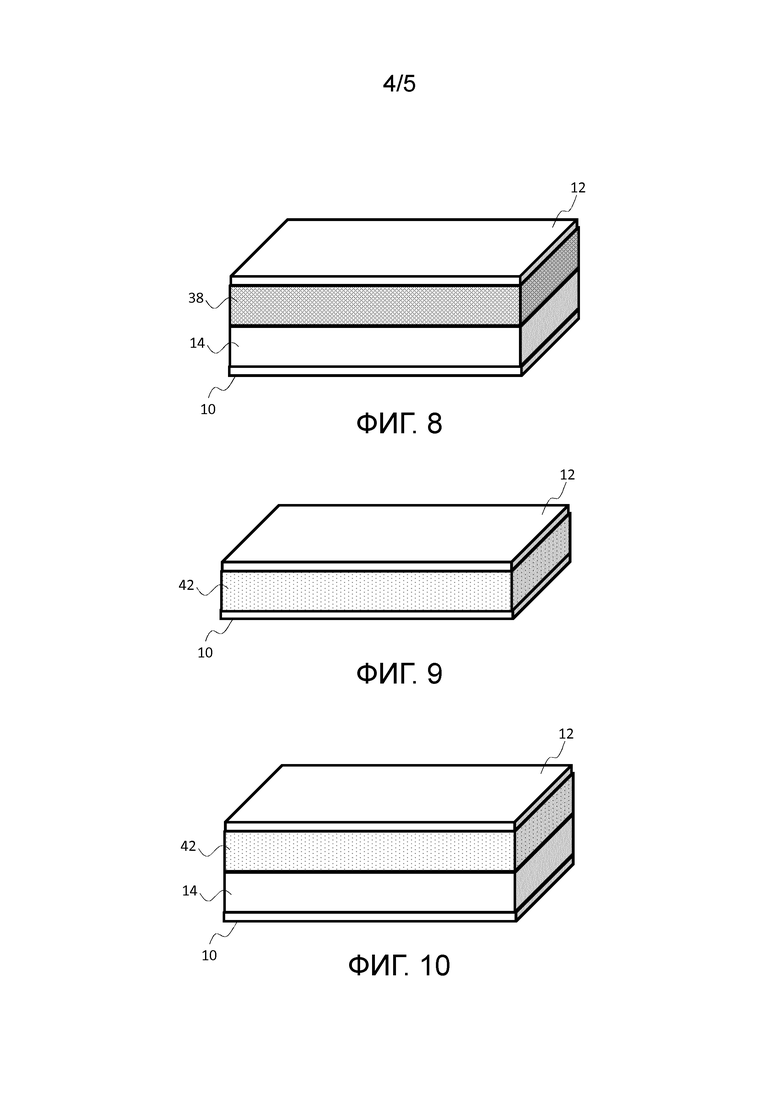
Фиг. 8 показывает иллюстративный элемент привода, содержащий слой компенсирующего емкость материала и слой электроактивного полимера;
Фиг. 9 показывает иллюстративный элемент привода, содержащий единственный слой иллюстративного компенсирующего емкость композита или смеси;
Фиг. 10 показывает иллюстративный элемент привода, содержащий слой иллюстративного компенсирующего емкость композита или смеси и слой электроактивного полимера; и
Фиг. 11 показывает зависимость относительной диэлектрической проницаемости от линий общего направления приложенного электрического поля для двух иллюстративных компенсирующих емкость слоев.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Изобретение обеспечивает электроактивный полимерный привод, содержащий средство компенсации емкости, выполненное с возможностью по меньшей мере частично возмещать любые изменения емкости в элементе, вызванные его деформацией. Таким образом, электронное управление устройства производится намного проще, поскольку переменная емкость элемента привода не обязана учитываться при стимуляции привода выполнять конкретную деформацию.
В соответствии по меньшей мере с одним предусмотренным множеством вариантов осуществления компенсация емкости достигается посредством манипуляции или поправки эффективной (или средней) относительной диэлектрической проницаемости (или диэлектрической постоянной) εr элемента привода. В частности, в соответствии с одним множеством вариантов осуществления обеспечен ЭАП-привод с автокомпенсацией, который отличается от ЭАП-приводов существующего уровня техники тем, что он выполнен с возможностью сокращать или устранять вариацию полной эффективной относительной диэлектрической проницаемости εr структуры привода как функцию одного или более из следующих параметров: а) приложенного электрического напряжения, b) приложенного электрического заряда на заряженных пластинах или поверхностях элемента и с) механической деформации элемента привода.
Сокращение вариации полной или средней относительной диэлектрической проницаемости sr элемента привода достигается по меньшей мере в одном множестве примеров посредством включения в состав материалов, независимо проявляющих присущее им значение sr диэлектрической проницаемости, которое уменьшается как функция одного или более из упомянутых выше параметров а), b) и с). Эти материалы естественным образом проявляют емкость, которая уменьшается как функция этих переменных, и, следовательно, могут использоваться для компенсации и по меньшей мере частичного возмещения роста емкости, который в ином случае проявился бы деформирующимся электроактивным полимером.
Однако материалы, которые проявляют уменьшение емкости при увеличении приложенного напряжения или магнитуды приложенного электрического поля в обычном диапазоне частот, в котором работает полимер ЭАП (в килогерцах), являются необычными. В статическом случае все материалы имеют тенденцию увеличивать свою емкость по мере роста напряжения (или зарядового состояния) (вследствие второго закона термодинамики).
Однако существуют некоторые классы материалов, которые вследствие динамических факторов, таких как задержки переупорядочения молекулярных диполей или медленное вращение жидких кристаллов, могут проявлять уменьшение динамической емкости в некоторых диапазонах частот.
В частности, в области (многослойных) керамических конденсаторов был исследован эффект проявления нелинейных диэлектрических свойств (см., например: Somiya, S. (2013). Handbook of Advanced Ceramics: Materials, Applications, Processing, and Properties. В Nonlinear Dielectricity of MLCCs (p. 415). Waltham: Academic Press).
Одним примером известного материала, который проявляет сильную диэлектрическую нелинейность, является цирконат-титанат бария (BZT). Соотношение между относительной диэлектрической проницаемостью BZT и амплитудой приложенного переменного электрического поля показано на фиг. 5, где (безразмерная) относительная диэлектрическая проницаемость представлена на оси у, и амплитуда приложенного переменного электрического поля (в кВ/мм) представлена на оси х. Было приложено переменное электрическое поле, имеющее частоту 10 кГц.
По графику можно заметить, что относительная диэлектрическая проницаемость εe материала BZT первоначально увеличивается при низких напряженностях поля, достигая пика приблизительно 11750 при напряженности поля приблизительно 0,28 кВ/мм. После приблизительно 0,3 кВ/мм относительная диэлектрическая проницаемость проявляет явное снижение значения как функция роста напряженности электрического поля.
Включение этот материал (или аналогичным образом ведущий себя материал, например, известный в области керамики) в состав структуры или активных слоев элемента ЭАП-привода окажет влияние на эффективную (среднюю) относительную диэлектрическую постоянную элемента привода в целом (по меньшей мере для более высоких напряженностей поля и более высоких частот переменного тока).
В дополнение к этому дополнительные примеры подходящих материалов для поправки эффективной (средней) относительной диэлектрической проницаемости могут быть раскрыты посредством рассмотрения членов высшего порядка в функции Ланжевена для ориентационной поляризации диэлектрических материалов (обсуждается в Raju, G. G. (2003). Dielectrics in Electric Fields. New York: CRC Press). Функция описывает следующее соотношение между средним дипольным моментом в направлении приложенного электрического поля μ0 и постоянным моментом одиночного диполя μ:
где x=μE/kT (Е = напряженность электрического поля, k = постоянная Больцмана и Т = температура). Выражение справа узнается как известная функция Ланжевена.
Члены высшего порядка этой формулы становятся релевантными только при высоких напряженностях электрического поля (порядка МВ/м или больше), и, следовательно, особенно релевантными в случае диэлектрических ЭАП, которые обычно стимулируются при напряженностях поля >10 В/мкм. Однако они также имеют потенциальную применимость для других вариантов ЭАП: поведение поддерживается для любого подходящего материала, стимулируемого при достаточно высоких напряженностях электрического поля.
Рассмотрение этих членов высшего порядка формулы Ланжевена показывает, что относительная диэлектрическая проницаемость уменьшается при высоких напряженностях поля. Изменение относительной диэлектрической проницаемости Δεr может быть выражено как:
где Е - напряженность электрического поля, NA - постоянная Авогадро, μ - магнитная проницаемость, С - константа, V молярный объем, ε0 - диэлектрическая проницаемость вакуума, k - постоянная Больцмана, и Т - температура.
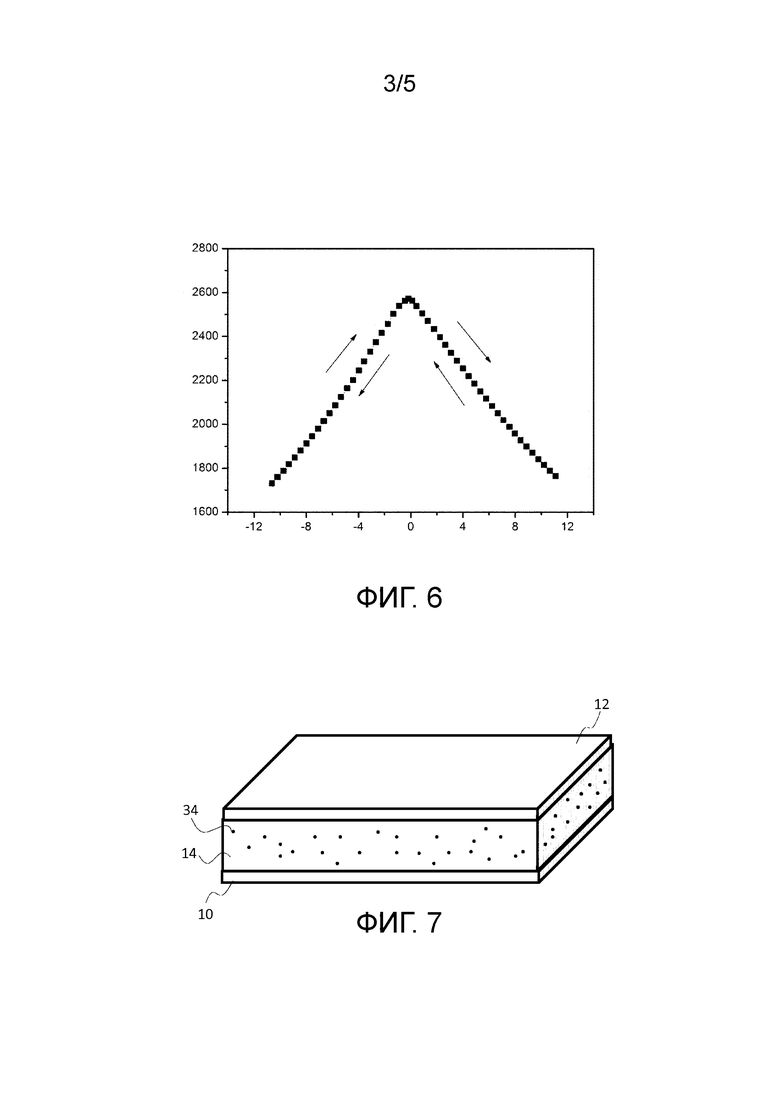
Примеры подходящих материалов для использования преимуществ этого эффекта включают в себя материалы титанат бария-стронция (BST), которые обычно используются для настраиваемых конденсаторов. Фиг. 6 показывает график, иллюстрирующий (безразмерную) относительную диэлектрическую проницаемость образца BST (ось y) как функцию напряженности приложенного постоянного электрического поля (ось х; кВ/см).
По графику можно заметить, что относительная диэлектрическая проницаемость BST уменьшается почти линейно с увеличением напряженности электрического поля, сокращаясь от максимального значения (для этого образца) приблизительно 2600 при нулевом приложенном поле до значения приблизительно 1750 при напряженности приложенного поля приблизительно 11 кВ/см. Такое же соотношение также наблюдается для эквивалентных электрических полей, приложенных в противоположном направлении.
Иллюстративные уменьшающие относительную диэлектрическую проницаемость материалы, обсуждавшиеся выше, могут быть включены в состав структуры привода многими способами для достижения желаемого эффекта обеспечения компенсации емкости как функции увеличения напряженности приложенного электрического поля.
Фиг. 7 показывает первый иллюстративный элемент привода в соответствии с одним или более вариантами осуществления изобретения. Структура содержит слой из электроактивного полимерного (ЭАП) материала 14, окруженный первым 10 и вторым 12 электродами для установления электрического поля через ЭАП-слой. В ЭАП-слой встроено множество случайным образом распределенных свободно вложенных частиц 34 из компенсирующего емкость материала в соответствии с одним или более описанных выше примеров или любого другого подходящего материала, имеющего свойство проявлять уменьшение относительной диэлектрической проницаемости с увеличением напряженности электрического поля (или приложенного электрического заряда, или степени механической деформации).
Частицы 34 могут быть распределены в значительной степени равномерно оп всему ЭАП-слою 14. Поскольку относительная диэлектрическая проницаемость этих частиц имеет свойство уменьшения как функции роста напряженности электрического поля, они имеют эффект понижения полной эффективной (средней) относительной диэлектрической проницаемости всего слоя 14. Посредством тщательного выбора подходящего материала, проявляющего относительную диэлектрическую проницаемость, которая уменьшается со скоростью, в значительной степени совпадающей с характерной для элемента привода скоростью увеличения емкости как функции приложенного электрического поля, возможно обеспечить привод, который проявляет в значительной степени постоянную емкость между электродами 10, 12, как функцию напряженности электрического поля. Это следует из уравнения (1), которое показывает, что емкость линейно зависит от относительной диэлектрической проницаемости.
Материал, имеющий требуемую скорость изменения относительной диэлектрической проницаемости, может быть выбран, или может быть специально изготовлен или синтезирован материал (в общем случае из обсуждавшихся выше классов), имеющий требуемую точную скорость изменения.
Фиг. 8 показывает второй иллюстративный элемент привода в соответствии с одним или более вариантами осуществления. Структура содержит первый 10 и второй 12 электроды, между которыми расположены первый слой из электроактивного полимерного (ЭАП) материала 14 и второй слой 38 из компенсирующего емкость материала в соответствии с обсуждавшимися выше примерами или других иллюстративных материалов, проявляющих сходную зависимость относительной диэлектрической проницаемости от приложенного электрического поля (или приложенного электрического заряда или степени механической деформации).
Как и в примере на фиг. 7, слой компенсирующего материала имеет эффект понижения полной эффективной (средней) относительной диэлектрической проницаемости структуры элемента привода, когда напряженность электрического поля увеличивается.
В показанном примере ЭАП-слой 14 и слой 38 компенсирующего материала непосредственно соединены друг с другом. Однако в альтернативных примерах эти слои могут быть разделены подходящим промежуточным слоем, таким как диэлектрический слой.
Хотя в иллюстративном приводе на фиг. 8 обеспечены только один ЭАП-слой 14 и один слой 38 компенсирующего материала, в дополнительных примерах может быть обеспечено множество слоев каждого типа. Они могут быть размещены, чередуясь друг с другом, например, чтобы достигнуть максимального смешивания относительных диэлектрических проницаемостей слоев этих двух типов.
В качестве альтернативы или дополнительно к описанному выше, в соответствии с дополнительными примерами может быть обеспечен элемент привода, содержащий по меньшей мере один ЭАП-слой, имеющий покрытие, сформированное из подходящего компенсирующего емкость материала. Покрытие может покрывать только верхнюю и нижнюю поверхности ЭАП-слоя или может покрывать все внешние поверхности (в том числе боковые поверхности) слоя. Покрывающий слой имеет сходный с параллельным слоем 38 в примере на фиг. 8 эффект изменения относительной диэлектрической проницаемости всей структуры привода как функции напряженности приложенного электрического поля (или приложенного электрического заряда, или степени механической деформации).
Хотя в приведенных выше описаниях и объяснениях были описаны материалы, проявляющие относительную диэлектрическую проницаемость, которая изменяется в зависимости от напряженности приложенного электрического поля, следует понимать, что эти материалы также могут изменяться в зависимости от других переменных. В случае ЭАП-привода степень деформации элемента привода естественным образом увеличивается как функция напряженности приложенного электрического поля. Следовательно, упомянутые выше материалы также могут изменяться как функция степени механической деформации элемента привода. Кроме того, поскольку согласно закону Кулона, напряженность электрического поля увеличивается линейно с увеличением полного количества приложенного электричества, эти материалы также могут изменяться в зависимости от количества приложенного электричества на электродах 10, 12.
Также могут быть рассмотрены другие материалы, имеющие свойство изменения либо проявляемой емкости, либо относительной диэлектрической проницаемости непосредственно относительно степени механической деформации и/или приложенного электрического заряда.
В соответствии с дополнительным множеством вариантов осуществления обеспечен элемент привода, сформированный из одного или более слоев ЭАП-композита или смеси, композит или смесь выполнены таким образом, что они проявляют относительную диэлектрическую проницаемость (или емкость), которая уменьшается как функция одного или более следующих параметров: напряженности приложенного электрического поля, приложенного электрического заряда на электродах привода и степени механической деформации.
В соответствии с примерами это может быть достигнуто посредством смешивания электроактивного полимерного материала с одним или более из обсуждавшихся выше компенсирующих емкость материалов. Получаемая в результате смесь может проявлять электроактивные чувствительные свойства ЭАП-материала, также проявляя относительную диэлектрическую проницаемость, которая уменьшается как функция одного из следующих параметров: напряженность приложенного электрического поля, приложенный электрический заряд и степень механической деформации.
Отношение ЭАП-материала к компенсирующему материалу должно быть тщательно выбрано, чтобы не ослабить концентрацию электроактивного полимера до такой степени, что электроактивные свойства прекращают иметь эффект.
В соответствии с дополнительными примерами может быть обеспечен ЭАП-композит, проявляющий электроактивные свойства ЭАП в комбинации с полем, зарядом или деформацией в зависимости от относительной диэлектрической проницаемости.
Много возможных конфигураций существует для элемента привода, содержащего компенсирующую емкость ЭАП-смесь или композитный материал описанного выше вида.
На фиг. 9 показан первый пример элемента привода, включающего в свой состав иллюстративный ЭАП-композит, в соответствии с представленными выше описаниями. Структура содержит единственный слой 42 из ЭАП-композитного материала, расположенный между первым 10 и вторым 12 окружающими электродами. Единственный слой проявляет стандартное поведение электроактивного полимера в смысле деформации в ответ на электрическое поле, установленное между первым 10 и вторым 12 электродами. Однако благодаря составу композита он выполнен с возможностью проявлять эффективную относительную диэлектрическую проницаемость (диэлектрическую постоянную), которая уменьшается как функция приложенного электрического поля со специально настроенной скоростью.
Когда прикладывается электрическое поле, и привод начинает деформироваться, присущая слою емкость начинает увеличиваться вследствие сжатия слоя 42 до меньшей толщины. Однако относительная диэлектрическая проницаемость композитного материала слоя 42 подстраивается для уменьшения с приложенным электрическим полем со скоростью, которая в значительной степени совпадает с увеличением емкости, вызванной деформацией. Таким образом, изменение емкости может быть частично или полностью возмещено или компенсировано.
Хотя пример на фиг. 9 показывает единственный слой ЭАП-композитного материала, в дополнительных примерах может быть обеспечено множество слоев.
Фиг. 10 показывает второй иллюстративный привод, включающий в свой состав ЭАП-композитный материал, в соответствии с описанными выше в общих чертах примерами и описаниями. Структура содержит первый слой 14 из стандартного (не модифицированного) электроактивного полимера и второй слой 42 из ЭАП-композитного материала, уложенный в стопку непосредственно рядом с первым. Два уложенных в стопку слоя расположены между первым 10 и вторым 12 электродами для установления электрического поля через слои.
После приложения электрического поля между электродами 10, 12 стандартный ЭАП-слой 14 и ЭАП-композитный слой 42 в ответ деформируются, и емкость каждого слоя соответственно увеличивается. Как и в примере на фиг. 9, ЭАП-композит выполнен с возможностью проявлять относительную диэлектрическую проницаемость, которая уменьшается с подходящей скоростью с увеличением напряженности электрического поля, чтобы частично или полностью возместить или компенсировать увеличенную емкость.
Хотя пример на фиг. 10 содержит единственный слой ЭАП-материала и единственный слой ЭАП-композитного материала, в дополнительных примерах в качестве альтернативы могут быть обеспечены множество из одного или обоих слоев. Они могут быть размещены, чередуясь друг с другом, чтобы обеспечить оптимальное смешивание соответствующих относительных диэлектрических проницаемостей слоев.
Как обсуждалось выше, некоторые иллюстративные материалы, подходящие для обеспечения эффекта компенсации емкости, могут проявлять желаемую зависимую от поля относительную диэлектрическую проницаемость только в относительно ограниченном диапазоне напряженностей приложенного электрического поля. В определенных случаях этот диапазон напряженностей поля может не совпадать с типичными напряженностями поля, в которых работает ЭАП-материал, и для которого он является чувствительным.
Чтобы решить эту проблему, в соответствии с любым из описанных выше вариантов осуществления элемент привода может быть дополнительно выполнен с возможностью содержать отклоняющий диэлектрическую проницаемость материал, выполненный с возможностью постоянно поправлять относительную диэлектрическую проницаемость по меньшей мере части элемента привода. Как обсуждалось в предыдущем разделе, такой материал может быть выполнен с возможностью производить фиксированное или статическое отклонение эффективной (средней) базовой относительной диэлектрической проницаемости элемента привода.
Это может иметь эффект поправки диапазона напряженностей приложенного поля, в котором электроактивный полимерный элемент привода является чувствительным. Если используется отклоняющий материал, который увеличивает базовую относительную диэлектрическую проницаемость, то это может иметь эффект реализации элемента привода, чувствительного в нижнем диапазоне напряженностей поля. Это вызвано тем, что полученное в результате поле смещения, наблюдаемое в элементе привода, для заданной напряженности приложенного поля увеличится по магнитуде.
Отклоняющий диэлектрическую проницаемость материал может использоваться в комбинации с компенсирующим материалом и/или компенсирующей смесью/композитом для достижения элемента привода, который является чувствительным точно в диапазоне частот, для которых компенсирующий материал проявляет требуемую диэлектрическая проницаемость, зависимую от поля/заряда/деформации.
Отклоняющий материал может сформировать смесь или композит с одним или обоими из электроактивного полимерного материала и компенсирующего материала/смеси/композита.
Различные средства существуют для обеспечения подходящего отклоняющего материала, диапазон которых теперь будет подробно пояснен.
В области техники известны способы поправки диэлектрической постоянной диэлектрических эластомеров (один класс электроактивного полимера). В литературе Carpi,. F., & et. al. (2011). Dielectric Elastomers as Electromechanical Transducers: Fundamentals, Materials, Devices, Models and Applications of an Emerging Electroactive Polymer Technology. Oxford: Elsevier, например, раскрыты несколько способов для увеличения диэлектрической постоянной (относительной диэлектрической проницаемости) диэлектрических эластомеров. Эти способы могут быть классифицированы в соответствии с тремя главными группами: произвольные композиты, структурированные полем композиты и новые синтетические полимеры.
Первый подход основан на дисперсии в полимерной матрице наполнителя, либо твердого (например, порошок), либо жидкого. Второй способ также использует композитный подход, хотя материал в этом случае также затвердевает в присутствии внешнего электрического поля, тем самым с выравниванием диполей. Третья стратегия основана на синтезе новых материалов со специализированными характеристиками.
В таблице 1 ниже представлен краткий обзор трех групп способов вместе с подборкой иллюстративных материалов, связанных с каждым из них.
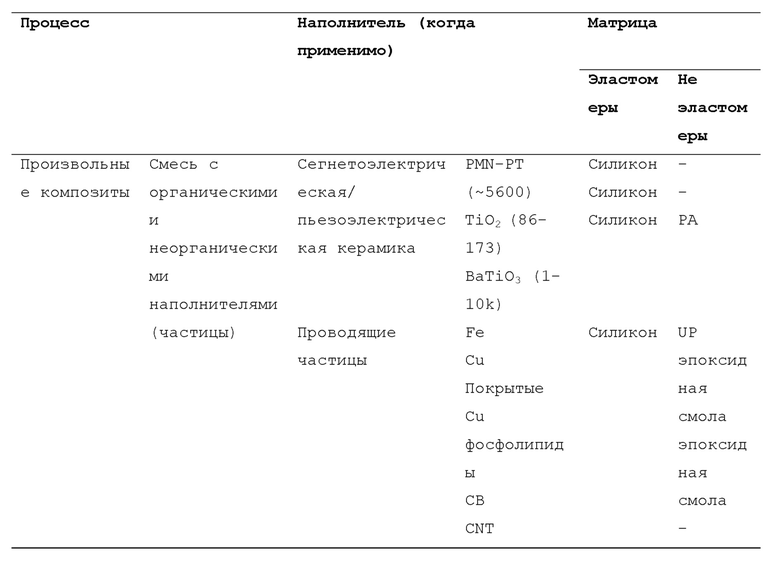
Таблица 1: список способов для модификации относительной диэлектрической проницаемости ЭАП-материалов с точки зрения используемого физического процесса и примененных материалов. Представленные числа являются относительной электрической проницаемостью материалов. Они могут быть найдены в Интернете в Википедии или в стандартных химических и физических справочниках. PMN-PT: свинцовый ниобат магния-свинцовый титанат; CВ: технический углерод; CNT: углеродная нанотрубка; СuРс: фталоцианин меди; PANI: полианилин; силикон: полисилоксаны резинового типа; PU: полиуретан; РА: полиакрилат; РЕ: полиэтилен; EVA: этиленвинилацетат; S-SBS: стирол-бутадиен-стирол; FLCE: сегнетоэлектрический жидкокристаллический эластомер; NBR: нитриловая резина, также известная как бутадиенакрилонитрильный каучук (Buna N): РНТ: полигексагидротриазины: эпоксидная смола: полиэпоксиды.
Таблица показывает образец технологий и процессов существующего уровня техники для модификации относительной диэлектрической проницаемости электроактивных полимерных материалов. Они включают в себя комбинирование ЭАП-материала с подходящим материалом наполнителя (с высокой относительной диэлектрической проницаемостью), имеющего эффект увеличения базовой относительной диэлектрической проницаемости основания ЭАП-материала. Таким образом, в результате получается композит или смесь, проявляющие электроактивные чувствительные свойства ЭАП-материала, но имеющие увеличенную базовую относительную диэлектрическую проницаемость. Эта смесь/композит может реализовать ЭАП-материал, чувствительный к нижнему диапазону напряженностей приложенного электрического поля.
Для достижения желаемого полного эффекта необходимо тщательно уравновесить количество отклоняющего диэлектрическую проницаемость материала, добавленного к полимеру, чтобы поведение активации привода не было нарушено или значительно уменьшено. Как обсуждалось, например, в документе Shakun, А. (2014). Soft Elastomeric Material with Improved Dielectric Permittivity. Thesis, 20, включение наполнителей с высокой относительной диэлектрической проницаемости, а также другие способы модификации полимеров, могут привести к изменениям свойств материала, которые уменьшают электрическую чувствительность полимера. Они включают в себя изменения модуля упругости (например, вследствие способа или степени перекрестного связывания) и переплетения цепей, а также специфических межмолекулярных и внутримолекулярных взаимодействий.
Однако количество добавленного отклоняющего материала тем не менее должно быть достаточно большим, чтобы создать необходимую поправку базовой относительной диэлектрической проницаемости.
Конкретное желаемое увеличение (например) относительной диэлектрической проницаемости может быть достигнуто либо посредством добавления относительно большого количества отклоняющего материала, имеющего (более) низкую диэлектрическую постоянную, либо посредством добавления относительно меньшего количества отклоняющего материала, имеющего более высокую диэлектрическую постоянную. Последний случай может быть в целом более предпочтительным, поскольку добавление меньшего количества материала менее вероятно нарушит электроактивные свойства всего элемента привода.
Дополнительные литературные источники также обсуждают способы увеличения относительной диэлектрической проницаемости материала посредством включения наполнителей с высокой диэлектрической постоянной или посредством модификации полимера (см., например, Shakun, А. (2014). Soft Elastomeric Material with Improved Dielectric Permittivity. Thesis, 20).
Как продемонстрировано, в связи с ранее обсуждавшимися вариантами осуществления некоторые ЭАП (диэлектрические эластомеры, в частности) могут быть модифицированы посредством добавления компенсирующих материалов, в результате чего их относительная диэлектрическая проницаемость динамически уменьшается в соответствии некоторыми переменными или граничными условиями, в частности, с напряженностью электрического поля.
Кроме того, как продемонстрировано в предыдущих абзацах, из процитированной литературы известны некоторые способы, в которых специализированные материалы могут быть добавлены к приводам из диэлектрических эластомеров, чтобы статически настроить их относительную диэлектрическую проницаемость для применения другого значения.
Таким образом, в соответствии с настоящими описанными вариантами осуществления предложено модифицировать электроактивный полимерный материал элемента привода таким образом, чтобы в некотором диапазоне напряженности примененного электрического поля эффективная диэлектрическая постоянная элемента ЭАП-привода проявляла уменьшение как функцию напряженности поля. Материал выбран таким образом, что скорость этого уменьшения точно компенсирует любое изменение входной емкости в приводе, вызванное сокращением толщины (и увеличением бокового размера) электроактивного полимера, когда он электрически активируется. Кроме того, могут быть включены отклоняющие диэлектрическую проницаемость материалы, чтобы статически сместить базовую относительную диэлектрическую проницаемость, в результате чего диапазон напряженностей электрического поля, в котором компенсирующий материал проявляет требуемое снижение, точно соответствует этим напряженностям, при которых ЭАП стандартно работает.
В соответствии с некоторыми примерами конструкция элемента привода, в частности, толщина слоя, может быть выполнена таким образом, чтобы гарантировать, что при стандартных рабочих напряжениях в элементе привода достигаются требуемые напряженности поля.
В соответствии с любым из примеров и описанных выше вариантов осуществления обеспеченный элемент привода может содержать по меньшей мере два слоя из материала, выполненного с возможностью проявлять относительную диэлектрическую проницаемость, которая уменьшается с увеличением напряженности электрического поля, приложенного электрического заряда и/или степени деформации, причем каждый из слоев проявляет упомянутое уменьшение только в конкретном диапазоне напряженностей приложенного электрического поля, значений электрического заряда или механических деформаций. Слои материала могут представлять собой слои компенсирующего материала, такие как иллюстративный слой 38 иллюстративного привода на фиг. 8. В качестве альтернативы слои материала могут представлять собой слои из материала ЭАП-композита или смеси, как в иллюстративном слое 42 приводов на фиг. 9 и 10.
Кроме того, каждый слой может содержать или включать в себя отклоняющий материал в соответствии с одним или более описанных выше примеров для достижения желаемого диапазона напряженностей поля активации/значения заряда/степени деформации. В конкретных примерах каждый слой может содержать композит или смесь, сформированные из ЭАП-материала и конкретного количества или плотности отклоняющего материала. Для достижения разных напряжений активации для разных слоев конкретная плотность или количество отклоняющего материала, включенного в каждый слой, могут быть разными. Таким образом, каждый слой может быть выполнен имеющим свое конкретное отклонение базовой относительной диэлектрической проницаемости. Это означает, что ЭАП-компонент (компоненты) каждого слоя могут стать активными в разных диапазонах напряжений.
Кроме того, как разъяснялось выше, посредством использования более чем одного слоя компенсация емкости может быть достигнута в широком диапазоне разных состояний активации и напряженностей электрической стимуляции, даже когда конкретный материал или композит, используемый для компенсации в каждом слое, имеет лишь ограниченный диапазон применимости. Кроме того, такая многослойная структура позволяет легче, дешевле и проще компенсировать подобное логарифмическому отношение между емкостью и приложенным напряжением (показано на фиг. 3).
В каждом слое, например, могут использоваться разные материалы или средства компенсации, каждые из которых обеспечивают конкретный уровень или магнитуду отклонения или возмещения емкости. Посредством построения структуры привода, имеющей несколько слоев с разными магнитудами отклонения смещения, которые последовательно активируются по мере деформации привода до все большей и большей степени, может быть без затруднений достигнут заданный шаблон требуемой компенсации емкости.
В соответствии по меньшей мере с некоторыми примерами приведенные выше варианты осуществления могут быть достигнуты посредством обеспечения слоев, сформированных из материала, который по-разному составлен или выполнен в каждом из релевантных слоев, или могут быть достигнуты посредством обеспечения нескольких слоев из одинакового материала, но с разной толщиной. Разная толщина каждого слоя может воздействовать на конкретную напряженность электрического поля, например, при которой относительная диэлектрическая проницаемость начинает проявлять снижение.
В соответствии с любым из приведенных выше примеров может быть обеспечен один или более смешанных ЭАП-слоев, содержащих ЭАП (или ЭАП-композит) в комбинации с некоторым количеством отклоняющего диэлектрическую проницаемость материала, причем плотность отклоняющего материала варьируется в одном или более направлениях в слое. Это может позволить производить различные интересные режимы деформации, например, клинообразные или даже волнистые формы как функцию напряженности приложенного электрического поля.
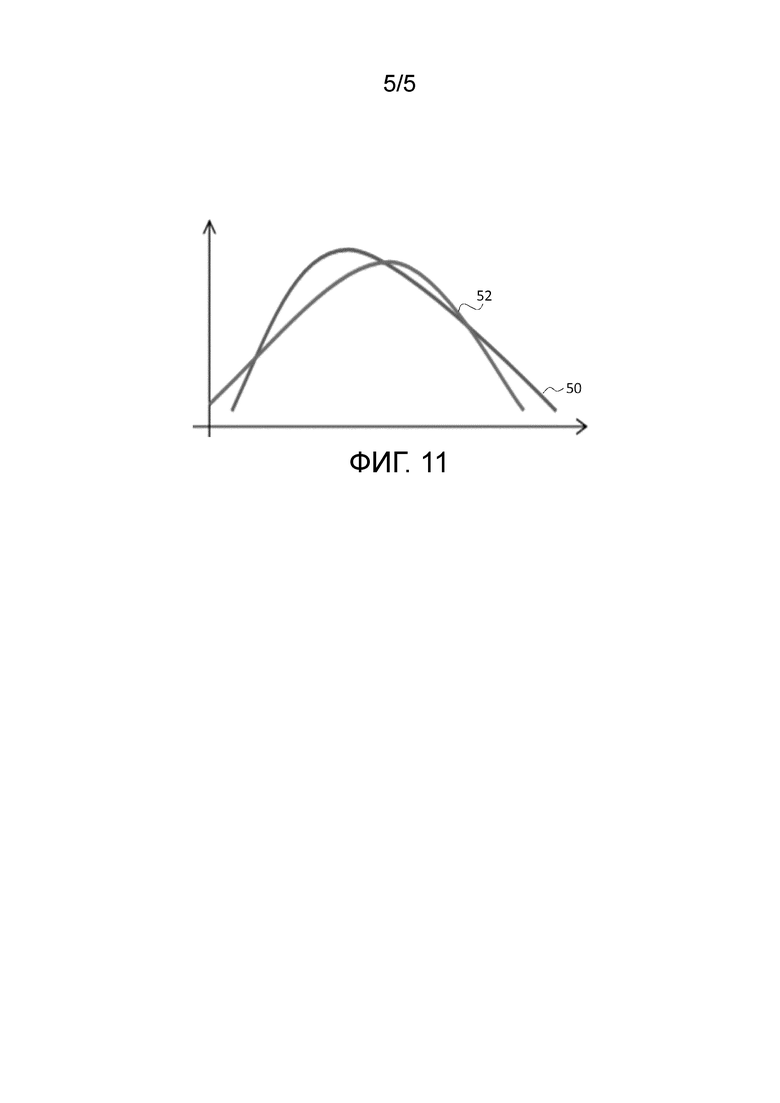
В соответствии с любым из представленных выше вариантов осуществления может быть обеспечено два или более слоев, содержащих компенсирующий емкость материал или ЭАП-композитный материал, причем соответствующий материал каждого слоя выполнен с возможностью следовать за своей собственной тенденцией или шаблоном снижения относительной диэлектрической проницаемости относительно другого слоя (слоев). Эта собственная тенденция или шаблон могут включать в себя, например, разные точки и/или уклоны активации, и/или могут включать в себя разные локальные минимумы или максимумы.
Фиг. 11 иллюстрирует эту концепцию, причем показаны линии 50, 52 общего направления для двух иллюстративных слоев компенсирующего материала, показывающие зависимость относительной диэлектрической проницаемости (ось у) от напряженности приложенного электрического поля (ось х). Каждый из двух слоев проявляет разные шаблоны поведения соотношения между диэлектрической проницаемостью и напряженностью поля, и каждый имеет свою максимальную точку и свою минимальную точку.
В примерах может быть обеспечено множество слоев, имеющих соответствующие тенденции относительной диэлектрической проницаемости, которые в широком диапазоне значений электрического поля смешиваются вместе, чтобы обеспечить в значительной степени ровное или однородное снижение относительной диэлектрической проницаемости в упомянутом диапазоне. Таким образом, в значительной степени однородная емкость может быть установлена в широком диапазоне напряженностей приложенного поля, например, даже когда кривая диэлектрической проницаемости каждого индивидуального слоя является относительно узкой.
Кроме того, в соответствии с любым из описанных выше вариантов осуществления может быть обеспечено множество слоев, содержащих компенсирующий емкость материал или ЭАП-композитный материал, причем материал каждого слоя выполнен с возможностью проявлять относительную диэлектрическую проницаемость, которая уменьшается с напряженностью приложенного электрического поля только для конкретного диапазона частот переменного электрического поля. Это обеспечивает гибкость рабочей частоты элемента привода, поскольку одинаковый эффект компенсации емкости может быть достигнут на разных частотах стимуляции.
В соответствии с любым из описанных выше вариантов осуществления элемент привода может дополнительно содержать размещение электродов, содержащее две или более пар электродов, каждая пара размещена таким образом, что между ней помещается своя собственная секция или область элемента привода. Каждая пара может управляться отдельно (например, посредством специализированного компонента управления). Дополнительно может быть обеспечен общий электрод заземления/опорный электрод. В соответствии с таким вариантом осуществления, напряженность электрического поля в различных частях или областях ЭАП может быть разной, обеспечивая большую гибкость с точки зрения достижимых форм деформации и поведения.
В альтернативных примерах специализированные компоненты управления для каждой пары электродов могут быть заменены резистивной и/или реактивной сетью, соединяющей пары электродов. Вследствие падения напряжения на сети разное (но фиксированный) распределение напряжения может быть сгенерировано между каждой парой, вызывая вариацию уровней активации в разных областях элемента привода. Это вновь приводит к большей гибкости с точки зрения формы деформации и поведения элемента привода.
Зависимость по времени между разными парами (и соответствующими стимулируемыми областями элемента привода) может быть достигнута посредством добавления к сети реактивного элемента (например, небольшого конденсатора или индуктивности с поверхностным монтажом (SMD)).
В соответствии с другими дополнительными примерами описанная выше резистивная и/или реактивная сеть может быть выполнена с возможностью обеспечивать один общий компонент управления для пары электродов, причем общее выходное напряжение разделяется на разные амплитуды в сет. Каждая ветвь может быть соединена с одной из каждой из пар электродов. Такое размещение может обеспечить преимущество в том, чтобы позволить пользователю привода настраивать структуру сети (поскольку она больше не интегрирована с самим приводом).
Известны материалы, подходящие для ЭАП-слоя.
Электроактивные полимеры включают в себя, но без ограничения, подклассы: пьезоэлектрические полимеры, электромеханические полимеры, сегнетоэлектрические релаксоры, электрострикционные полимеры, диэлектрические эластомеры, жидкокристаллические эластомеры, сопряженные полимеры, ионные полимер-металлические композиты, ионные гели и полимерные гели.
Подкласс электрострикционные полимеры включает в себя, но без ограничения:
Поливинилиденфторид (PVDF), поливинилиденфторид-трифторэтилен (PVDF-TrFE), поливинилиденфторид-трифторэтилен-хлорфторэтилен (PVDF-TrFE-CFE), поливинилиденфторид-трифторэтилен-хлортрифторэтилен) (PVDF-TrFE-CTFE), поливинилиденфторид-гексафторпропилен (PVDF-HFP), полиуретаны или их смеси.
Подкласс диэлектрические эластомеры включают в себя, но без ограничения:
акрилаты, полиуретаны, силиконы.
Подкласс сопряженные полимеры включает в себя, но без ограничения:
полипиррол, поли-3,4-этилендиокситиофен, поли(р-фенилен сульфид), полианилины.
Ионные устройства могут быть основаны на ионных полимер-металлических композитах (IPMC) или сопряженных полимерах.
Ионный полимер-металлический композит (IPMC) представляет собой синтетический композитный наноматериал, который проявляет поведение искусственных мышц при приложении напряжения или электрического поля.
Более конкретно IPMC состоят из ионного полимера, такого как Nafion или Flemion, на поверхности которого посредством химического или физического покрытия нанесены проводники, например, платиновые или золотые электроды, или электроды на основе углерода. Под приложенным напряжением перенос и перераспределение ионов вследствие поданного напряжения на полоску из IPMC приводят к деформации изгиба. Полимер представляет собой мембрану из набухающего при растворении ионообменного полимера. Поле вызывает перемещение катионов на сторону катода вместе с водой. Это приводит к реорганизации гидрофильных кластеров и к расширению полимера. Деформация в области катода приводит к напряжению в остальной части полимерной матрицы, приводящему к изгибу в сторону анода. Изменение полярности приложенного напряжения меняет направление изгиба.
Если осажденные электроды размещены в несимметричной конфигурации, наложенное напряжение может вызвать все виды деформаций, таких как извивание, свертывание, скручивание, накручивание и несимметричная деформация изгиба.
Во всех этих примерах дополнительные пассивные слои могут быть обеспечены для влияния на электрическое и/или механическое поведение слоя ЭАП в ответ на приложенное электрическое поле.
Слой ЭАП каждого блока может быть помещен между электродами. Электроды могут быть растягивающимися, чтобы следовать за деформацией слоя ЭАП-материала. Материалы, подходящие для электродов, также известны и, например, могут быть выбраны из группы, содержащей тонкие металлические пленки, например, золотые, медные или алюминиевые, или органические проводники, например, технический углерод, углеродные нанотрубки, графен, полианилин (PANI), поли(3,4-этилендиокситиофен) (PEDOT), например, поли(3,4-этилендиокситиофен) поли(стиролсульфонат) (PEDOT:PSS). Также могут использоваться металлизированные полиэфирные пленки, такие как металлизированный полиэтилентерефталат (PET), например, с использованием алюминиевого покрытия.
Изобретение может быть применено во многих применениях ЭАП и фотоактивных полимеров, включая примеры, в которых интерес представляет пассивный матричный массив приводов.
Во многих применениях главная функция продукта основывается на (локальной) манипуляции человеческой ткани или активации поверхностей контакта с тканью. В таких применениях ЭАП-приводы, например, предоставляют уникальные преимущества главным образом благодаря миниатюрному форм-фактору, гибкости и высокой плотности энергии. Следовательно, ЭАП и фоточувствительные полимеры могут быть легко интегрированы в мягкие, трехмерные и/или миниатюрные продукты и интерфейсы. Далее приведены примеры таких применений.
Косметический уход за кожей, например, приборы активации кожи в форме кожного пластыря на основе чувствительного полимера, которые придают коже постоянное или циклическое растяжение, чтобы натянуть кожу или уменьшить морщины.
Дыхательные устройства с маской взаимодействия с пациентом, которые имеют активную подушку или прокладку на основе чувствительного полимера, чтобы обеспечить переменное нормальное давление на кожу для сокращения или предотвращения красных отметин на лице.
Электрические бритвы с адаптивной бреющей головкой. Высота поверхностей контакта с кожей может регулироваться с использованием приводов из чувствительного полимера для влияния на баланс между близостью и раздражением.
Приборы для очистки полости рта, такие как воздушная зубная нить с приводом динамического сопла для улучшения проникновения струи, особенно в промежутках между зубами. В качестве альтернативы зубные щетки могут быть снабжены активированными пучками.
Устройства бытовой электроники или сенсорные панели, которые обеспечивают локальную тактильную обратную связь через массив чувствительных полимерных преобразователей, которые интегрированы в пользовательский интерфейс или находятся рядом.
Катетеры с направляемым кончиком для упрощения навигации в извилистых кровеносных сосудах.
Измерения физиологических параметров человеческого тела, таких как частота сердцебиения, SpO2 и кровяное давление.
Еще одна категория соответствующего применения, которой принесет пользу использование таких приводов, относится к модификации света. Оптические элементы, такие как линзы, отражающие поверхности, дифракционные решетки и т.д., могут быть сделаны адаптивными по форме или с адаптацией позиции с использованием этих приводов. В этом случае одним преимуществом ЭАП является, например, более низкое потребление энергии.
Другие изменения для раскрытых вариантов осуществления могут быть поняты и выполнены специалистами в области техники при осуществлении на практике заявленного изобретения на основе изучения чертежей, раскрытия и зависимых пунктов формулы изобретения. В пунктах формулы изобретения слово "содержит" не исключает другие элементы или этапы, и употребление единственного числа не исключает множество. Тот лишь факт, что некоторые меры описаны во взаимно различных зависимых пунктах формулы изобретения, не указывает, что комбинация этих мер не может использоваться для получения преимуществ. Любые знаки для ссылок в формуле изобретения не должны рассматриваться как ограничивающие объем изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПРИВОДА И СПОСОБ | 2017 |
|
RU2749570C2 |
| УСТРОЙСТВО ПРИВОДА, ИМЕЮЩЕЕ В СВОЕМ СОСТАВЕ ЭЛЕКТРОАКТИВНЫЙ ПОЛИМЕРНЫЙ ПРИВОД, И СПОСОБ УПРАВЛЕНИЯ | 2017 |
|
RU2737791C2 |
| СЕНСОРНОЕ УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ ФИЗИОЛОГИЧЕСКОГО ПАРАМЕТРА | 2017 |
|
RU2750352C2 |
| УСТРОЙСТВО ПРИВОДА, ИМЕЮЩЕЕ В СВОЕМ СОСТАВЕ ЭЛЕКТРОАКТИВНЫЙ ПОЛИМЕРНЫЙ ПРИВОД, И СПОСОБ УПРАВЛЕНИЯ | 2017 |
|
RU2737790C2 |
| ЭАП-ПРИВОД И СПОСОБ ВОЗБУЖДЕНИЯ | 2017 |
|
RU2750680C2 |
| ДАТЧИКИ НА ОСНОВЕ ЭЛЕКТРОАКТИВНЫХ ПОЛИМЕРОВ И СПОСОБЫ ВОСПРИЯТИЯ | 2016 |
|
RU2723887C2 |
| АКТУАТОРНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2017 |
|
RU2737789C2 |
| УСТРОЙСТВО МОЛОКООТСОСА | 2017 |
|
RU2754631C2 |
| ПРИВОДНОЕ УСТРОЙСТВО, СОДЕРЖАЩЕЕ ПРИВОД НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА, И СПОСОБ ВОЗБУЖДЕНИЯ | 2017 |
|
RU2736071C2 |
| ДАТЧИК ПОТОКА И СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ПОТОКА | 2017 |
|
RU2768159C2 |
Изобретение относится к электроактивным полимерным приводам. Предлагается элемент привода, проявляющий свойство емкости и содержащий электроактивный полимерный материал, выполненный с возможностью деформироваться в зависимости от магнитуды приложенного электрического поля, и средство компенсации емкости, выполненное с возможностью по меньшей мере частично компенсировать изменения емкости, вызванные деформацией элемента привода. Средство компенсации емкости содержит компенсирующий материал, который формирует отдельный слой для электроактивного полимерного материала или формирует смесь или композит с электроактивным полимерным материалом. Причем отдельный слой проявляет уменьшение емкости через него. Компенсирующий материал в смеси или композите проявляет уменьшение эффективной относительной диэлектрической проницаемости в ответ на одно или более из следующих изменений: увеличение магнитуды приложенного электрического поля, увеличение приложенного электрического заряда, механическая деформация элемента привода. Технический результат: упрощение электронного управления устройства из-за отсутствия необходимости учитывать изменение емкости элемента привода при его деформации. 10 з.п. ф-лы, 11 ил.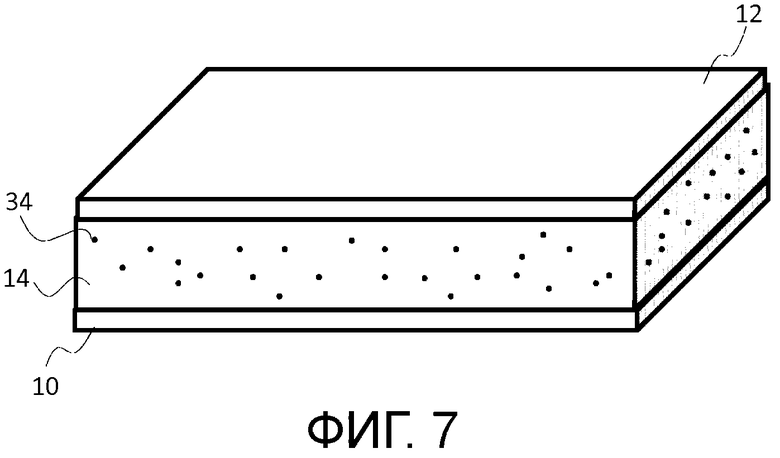
1. Элемент привода, проявляющий свойство емкости и содержащий:
электроактивный полимерный материал, выполненный с возможностью деформироваться в зависимости от магнитуды приложенного электрического поля; и
средство компенсации емкости, выполненное с возможностью по меньшей мере частично возмещать изменения упомянутой емкости, вызванные деформацией элемента привода,
причем средство компенсации емкости содержит компенсирующий материал, который формирует отдельный слой для электроактивного полимерного материала или формирует смесь или композит с электроактивным полимерным материалом, причем отдельный слой проявляет уменьшение емкости через него, или компенсирующий материал в смеси или композите проявляет уменьшение эффективной относительной диэлектрической проницаемости, в ответ на одно или более из следующих изменений: увеличение магнитуды приложенного электрического поля, увеличение приложенного электрического заряда, механическая деформация элемента привода.
2. Элемент привода по п. 1, в котором компенсирующий материал слоя проявляет уменьшение эффективной относительной диэлектрической проницаемости, чтобы произвести уменьшение емкости.
3. Элемент привода по п. 2, в котором средство компенсации емкости содержит множество частиц, сформированных из упомянутого компенсирующего материала, упомянутые частицы встроены в электроактивный полимерный материал.
4. Элемент привода по любому предыдущему пункту, в котором средство компенсации емкости содержит слой в форме покрытия, сформированного из упомянутого компенсирующего материала, покрывающий по меньшей мере часть электроактивного полимерного материала.
5. Элемент привода по любому предыдущему пункту, в котором элемент привода содержит по меньшей мере первый слой электроактивного полимерного материала и по меньшей мере второй слой, содержащий упомянутый компенсирующий материал.
6. Элемент привода по любому предыдущему пункту, причем элемент привода содержит один или более слоев упомянутой смеси или композита и причем элемент привода дополнительно содержит один или более слоев электроактивного полимерного материала.
7. Элемент привода по любому предыдущему пункту, дополнительно содержащий отклоняющий диэлектрическую проницаемость материал, выполненный с возможностью постоянно поправлять относительную диэлектрическую проницаемость по меньшей мере части элемента привода.
8. Элемент привода по любому предыдущему пункту, в котором компенсирующий материал содержит по меньшей мере первый слой и второй слой, каждый из первого и второго слоев выполнен с возможностью проявлять упомянутое уменьшение емкости.
9. Элемент привода по п. 8, в котором каждый слой выполнен с возможностью проявлять упомянутое уменьшение емкости только в своем конкретном диапазоне напряженностей электрического поля, значений приложенного электрического заряда или механических деформаций.
10. Элемент привода по п. 9, в котором один или более по меньшей мере из первого и второго слоев содержит отклоняющий диэлектрическую проницаемость материал, выполненный с возможностью постоянно поправлять относительную диэлектрическую проницаемость по меньшей мере части элемента привода.
11. Элемент привода по п. 8, в котором каждый слой выполнен с возможностью проявлять упомянутое уменьшение емкости только в своем конкретном диапазоне частот приложенного электрического поля.
| WO 2005081676 A2, 09.09.2005 | |||
| JP 2010161894 A, 22.07.2010 | |||
| US 20100039001 A1, 18.02.2010 | |||
| US 20130134832 A1, 30.05.2013 | |||
| ЭЛЕКТРОАКТИВНЫЙ ПОЛИМЕРНЫЙ АКТЮАТОР | 2011 |
|
RU2568944C2 |

