Изобретение относится к области гидроакустики и может быть использовано для построения систем автоматического обнаружения эхосигналов, принятых гидролокатором на фоне шумовой и реверберационной помехи, и его классификации при использовании псевдошумовых сигналов.
Известны способы обнаружения и классификации эхосигнала, основанные на определении энергетического спектра электрического процесса, представляющего собой смесь электрического сигнала и нормальной стационарной шумовой помехи, изложенные, например, в работе [Е.С. Евтютов, В.Б. Митько Примеры инженерных расчетов в гидроакустике // Л., Судостроение, 1981 г, стр. 77]. Способ содержит спектральный анализ этого процесса, детектирование спектральных составляющих, интегрирование огибающей и обнаружение эхосигнала при сравнении с порогом.
Недостатком этого способа является то, что в способе используется тональный сигнал большой длительности и на выходе системы обработки определяется спектр эхосигнала, по которому можно определить скорость сближения и можно проводить классификацию на классы подвижный и неподвижный, но нельзя определить объект на классы подводный или надводный.
Известны способы обнаружения и измерения параметров обнаруженных объектов, позволяющие производить классификацию объектов, с использованием, так называемых, псевдошумовых сигналов (ПШС), при обработке которых на выходе формируется взаимно-корреляционная функция эхосигнала и излученного зондирующего сигнала. При этом ширина корреляционной функции определяется не длительностью сигнала, а шириной полосы излученного зондирующего сигнала. Эти способы нашли применение в радиолокации и в дальней гидролокации [Р. Бенжамин «Анализ радио и гидролокационных сигналов» // Воениздат М, 1969]. Основные свойства этих сигналов определяются видом внутренней модуляции, которая определяет вид функции неопределенности, частным случаем которой является функция корреляции. Для задач классификации в гидролокации интерес представляют псевдошумовые сигналы, которые имеют кнопочную функцию неопределенности, которая обеспечивает хорошее разрешение по времени и по скорости [В.А. Зарайский, A.M. Тюрин «Теория гидролокации» // Изд. ВМАОЛУ, Л., 1975 г., стр. 242]. Как правило, обработка таких сигналов производится с использованием многоканальных корреляторов [В.А. Зарайский, A.M. Тюрин «Теория гидролокации» // Изд. ВМАОЛУ, Л., 1975 г., стр. 255] или многоканальных согласованных фильтров [В.А. Зарайский, A.M. Тюрин «Теория гидролокации» // Изд. ВМАОЛУ, Л., 1975 г., стр. 333]. Если гидролокатор неподвижен и объект локации неподвижен, то излученный сигнал и принятый эхосигнал совпадают и обеспечивается оптимальное значение взаимно корреляционной функции. Однако такая ситуации практически никогда не встречается, и за счет собственного движения и движения цели происходит смещение спектра отраженного сигнала в соответствии с эффектом Доплера [В.А. Зарайский, A.M. Тюрин «Теория гидролокации» // Изд. ВМАОЛУ, Л., 1975 г., стр. 200], в результате чего спектры не совпадают, и не образуется корреляционная функция. Именно поэтому используется при приеме многоканальная обработка, где каждый канал соответствует определенной скорости цели. Обработка сигнала в каждом канале производится на частоте, смещенной по отношению к частоте излученного сигнала в соответствии с определенной скоростью цели.
Известен способ обработки сложного сигнала, приведенный в книге [В.А. Зарайский, A.M. Тюрин «Теория гидролокации» // Изд. ВМАОЛУ, Л., 1975 г., стр. 255].
Способ обработки принятого зондирующего псевдошумового сигнала содержит следующие операции: излучение зондирующего псевдошумового сигнала, формирования М-опорных сигналов, центральная частота которых сдвинута по частоте относительно излученного сигнала на величину К, прием эхосигнала, определение Μ-корреляционных функций между эхосигналом и каждым из М-опорных сигналов, измерение амплитуды корреляционных функций, выбор корреляционной функции с максимальной амплитудой, определение временного положения максимума корреляционной функции для определения дистанции, определение номера опорного сигнала для определения скорости, отображение результата на индикаторе.
Наиболее близким к предлагаемому способу по количеству общих признаков является гидролокационный способ обнаружения объекта и измерения его параметров, по которым производится классификация [Патент РФ №2674552 С1 от 07.12 2017., МПК G01S 15/00, опубл. 11.12.2018, БИ №35].
Способ содержит излучение зондирующего псевдошумового сигнала длительностью Τ и полосой F в момент tиз, формирования Μ опорных сигналов, центральная частота которых сдвинута по частоте относительно излученного сигнала на величину К, прием эхосигнала, определение Μ корреляционных функций между эхосигналом и каждым из М-опорных сигналов, измерение амплитуды корреляционных функций, выбор корреляционной функции с максимальной амплитудой Амакс, определение временного положения максимума корреляционной функции tмакс для определения дистанции по формуле Д=0,5С(tмакс - tиз), где С - скорость звука, определение номера опорного сигнала Mtмакс для определения скорости Vtмакс отображение результата на индикаторе, при этом величина сдвига по частоте К не превышает 0,5/Т. В соответствии с этим способом определяют крайний номер опорного канала симметричного Mtмакс относительно частоты излучения и в этом канале определяют максимальное значение выброса корреляционной функции Апор и, если Амакс>2Апор, то определяют амплитуды всех выбросов корреляционной функции канала с Амакс, величина которых превысила 0,5Амакс, определяют временное положение каждого выброса ti, определяют разность между крайними выбросами и протяженность эхосигнала L=0,5C(t1 - tn), где t1 первый выброс корреляционной функции, превысивший порог, tn последний выброс корреляционной функции, превысивший порог, определяют число выбросов превысивших порог N и определяют класс цели по скорости, протяженности и числу выбросов.
Недостатком данного способа является то, что он не позволяет классифицировать объект на классы надводный или подводным. Следует иметь в виду, что под надводными понимаются не только надводные корабли, но и подводные лодки, находящиеся в надводном положении.
Задачей изобретения является обеспечение возможности классификации обнаруженного объекта на классы надводный объект или подводный объект при использовании псеводшумового сигнала.
Техническим результатом заявленного изобретения является расширение списка классифицируемых объектов.
Для обеспечения этого технического результата в известный способ, содержащий излучение зондирующего псевдошумового сигнала, прием эхосигнала, проведение оптимальной многоканальной корреляционной обработки, включающей измерение помехи, измерение амплитуды корреляционных функций, выбор корреляционной функции с максимальной амплитудой Амакс, определение временного положения ТАмакс максимума корреляционной функции, введены новые признаки, а именно одновременно сопоставляют результат взаимно-корреляционной обработки с максимальной амплитудой Амакс и реализацию входного сигнала до обработки в широкой полосе, принимают ТАмакс за время окончания принятого сигнала на входе Ток, определяют среднее значение помехи Апом и порог в широкой полосе, последовательно во времени измеряют амплитуды временных реализаций в широкой полосе частот превысившие порог и определяют временное положение амплитуды первой реализации, превысившей порог Тнач, определяют временное положение конечной амплитуды, превысившей порог Ткон, и определяют разность (Ткон - Тнач), при этом, если (Ткон - Тнач)>2Тсиг, где Тсиг длительность зондирующего сигнала, определяют разность (Тнач - Ток), и если (Т||ач - Ток)≤0,1Тсиг, принимают решение, что цель надводная, если (Т„ач - Ток)>0,1Тсиг, принимают решение цель подводная.
Поясним сущность предлагаемого технического решения.
Известно, [«Физические основы подводной акустики» // под ред. Мясищева В.И., Сов радио, М., 1956 г.], что при движении надводного корабля формируется кильватерный след, который насыщен пузырями различных размеров и при падении на него зондирующего сигнала формируется эхосигнал на этой частоте. Кроме того, формируется эхосигнал от корпуса на частоте, которая определяется скоростью движения корабля. Аналогично и при движении подводной лодки формируется кильватерный след, и сила струи от идущих надводным ходом подводных лодок сравнима с силой струи для крупных надводных кораблей [«Физические основы подводной акустики» // под ред. Мясищева В.И., Сов радио, М., 1956 г., стр. 719]. В подводном положении сила струи от кильватерного следа подводной лодки существенно меньше и зависит от глубины погружения. Эхосигнал от пузырькового следа определяется не отражением, а колебанием пузырей, частоты которых определяются размером пузырей, и эти частоты могут совпадать с частотой зондирующего сигнала. Поэтому, при движении подводной лодки на глубине, формирование эхосигнала от следа будет зависеть от глубины погружения. Размер пузыря будет увеличиваться при всплытии, и на некоторой глубине пузыри будут достигать размеров, частоты которых сопоставимы с частотой зондирующего сигнала. Показано, что если частота зондирующего сигнала совпадает с частотой пузырька, то амплитуда его колебаний увеличивается во много раз. Так же газосодержащие среды образуются в морской воде вблизи выходных отверстий систем отработанных газов у подводной лодки. Пузыри, в силу своих физических особенностей, всплывают к поверхности, где давление меньше, чем на глубине и соответственно увеличиваются в размерах, поэтому и резонансная частота основной массы пузырей понижается. В работе [А.А. Любицкий, Н.Л. Бережная «Обратное рассеяние звука в газовых факелах Черного моря», «Акустика океана» 26 сессия РАО 14 школа - семинар им. акад. Р.Н. Бреховских] показано, что скорость всплытия пузырей находится в пределах 25-23 см/сек. Таким образом, за 10 сек. они поднимутся в среднем на 2.5 метра, а за 100 сек на 25 метров. За это время подводный объект, двигаясь со скоростью 3 м/с (6 узлов) пройдет 300 м. Из этого следует, что за корпусом подводной лодки образуется длина следа порядка 300 м, состоящее из пузырей различного диаметра, частота части из которых соответствует резонансной частоте зондирующего сигнала. Из этих 300 м начальный промежуток после корпуса подводной лодки будет содержать пузыри малого размера, частоты которых точно не соответствуют частоте излучаемого сигнала, поэтому эхосигнал от этого промежутка будет отсутствовать, что и определят глубину источника. Далее следует эхосигнал от пузырей различного диаметра, в том числе и от пузырей, частоты которых соответствуют частоте зондирующего сигнала. Таким образом, может наблюдаться эхосигнал от корпуса и эхосигнал от пузырькового следа, которые разнесены по времени. Необходимо обнаружить и определить временной промежуток между эхосигналом от корпуса и эхосигналом от начала пузырькового следа, который содержит пузыри, частоты которых соответствуют частоте зондирующего сигнала. Зная этот временной промежуток можно ориентировочно определить глубину погружения источника эхосигнала. В работе [В.Г. Тимошенков «Влияние газосодержащей среды на неопределенность решения задачи классификации» // НТС Гидроакустика, вып. 48(4), стр. 5-9] приведены примеры формирования подобных сигналов.
У надводного корабля имеется кильватерный след, который образуется за счет движения корабля и вращения винтов, создающих пелену пузырей различного диаметра за счет кавитации. Эхосигнал от таких пузырей формируется одновременно с эхосигналом от корпуса, и нет временного промежутка между эхосигналом от корпуса и эхосигналом от следа [«Физические основы подводной акустики» // Сов. радио., М., 1956 г. ]. Таким образом, измеряя временной промежуток между эхосигналом от корпуса и эхосигналом от следа можно принимать решение о классе обнаруженного объекта: надводный - подводный.
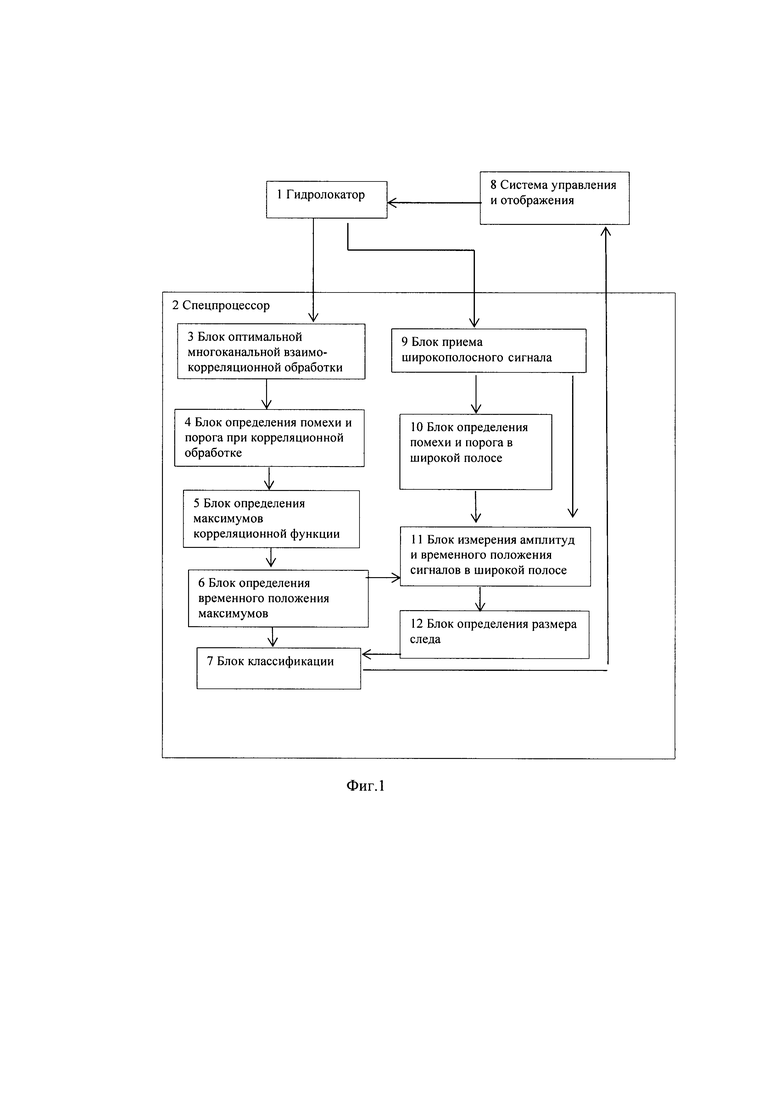
Блок-схема, реализующего предлагаемый способ представлен на (фиг. 1).
Устройство (фиг. 1) содержит гидролокатор 1 соединенный со спецпроцессором 2, содержащим последовательно соединенные блок 3 оптимальной многоканальной взаимно-корреляционной обработки, блок 4 определения помехи и порога после корреляционной обработки, блок 5 определение оценки максимумов сигнала корреляционной функции, блок 6 определения временного положения максимумов, блок 7 классификации, который через блок 8 системы управления и отображения соединен с гидролокатором 1. Второй выход гидролокатора 1 через блок 9 приема широкополосного сигнала и блок 10 определения помехи и выбора порога в широкой полосе, соединен со вторым входом блока 11 измерения амплитуд и временного положения сигнала в широкой полосе, выход которого соединен через блок 12 время длительности следа со вторым входом блока 7 классификации. Второй выход блока 6 соединен со вторым входом блока 11 Гидролокатор 1 является известным устройством, который достаточно подробно описан в технической литературе [Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника» // Санкт-Петербург, «Наука», 2004 г., стр. 152, 340], и так же используется в прототипе. Для качественного решения задач обработки гидроакустической информации в современных корабельных гидроакустических средствах (станциях) используются спецпроцессоры на основе ЦВС, обладающие высокой производительностью, функциональной надежностью и малыми габаритами. С использованием специального алгоритмического и программного обеспечения спецпроцессорами могут решаться все задачи формирования и обработки принимаемых гидроакустических сигналов, в том числе для измерения параметров эхосигнала по всем пространственным каналам, взаимно-корреляционная обработка и решения задач отображения и управления процессом излучения и приема эхосигналов [Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника» // Санкт-Петербург, «Наука», 2004 г., стр. 281]. Практически все используемые процедуры обработки цифровой входной информации могут быть реализованы на современных компьютерах и ноутбуках, в которых реализованы вычислительные программы Матлаб, Матсард и др. [А.Б. Сергиенко «Цифровая обработка сигналов» // СПб, «БХВ - Петербург», 2011 г.; А. Оппенгейм, Р. Шафер «Цифровая обработка сигналов» // Техносфера, М, 2012 г].
Реализацию предлагаемого способа целесообразно рассмотреть на примере работы устройства (фиг. 1).
Гидролокатор 1 излучает псевдошумовой зондирующий сигнал, параметры которого определяются системой управления и отображения 8. Принятые гидролокатором 1 эхосигналы поступают в спецпроцессор 2 в блок 3 многоканальной оптимальной корреляционной обработки, где производится выделение огибающей взаимно-корреляционной функции принятых эхосигналов и опорных сигналов. Выделенные эхосигналы поступают через блок 4 определения помехи и порога при корреляционной обработке, в блок 5 определение оценки максимумов корреляционной функции, где определяется сигнал с максимальным амплитудой Амакс на частоте, соответствующий скорости движения корпуса судна. На основании измеренного в блоке 4 порога в блоке 6 производится определения временного положения максимума ТАмакс, которое поступает в блок 7 классификации. Одновременно от гидролокатора 1 поступают временные реализации сигнала в блок 9 приема широкополосного сигнала, которые передаются в блок 10 определения помехи и выбор порога в широкой полосе. Эта помеха отличается от помехи, измеренной в блоке 4, поскольку это совершенно разные сигналы одного и того же входного сигнала, но на выходе разной процедуры обработки. Именно этот порог определяет длительность пузырькового следа в широкой полосе. Для этого в блоке 11 по выбранному порогу определяют сигналы, превысившие порог на временной реализации в широкой полосе. Измеренные амплитуды и временные положения сигналов, превысивших порог в широкой полосе, передаются в блок 12, где определяется размер следа в широкой полосе.
В блоке 6 определяются временные положения максимумов эхосигнала по результатам корреляционной обработки эхосигнала от корпуса, которые соответствуют длительности эхосигнала от корпуса и временное положение максимума эхосигнала, что соответствует времени окончания эхосигнала от корпуса в широкой полосе. Эти данные поступают в блок 7 классификации, на второй вход которого одновременно поступают параметры следа, измеренные в блоке 12.
В блоке 7 принимается решение о классе обнаруженного объекта по измеренным классификационным признакам, что далее передается в блок 8 для отображения.
Таким образом, взаимно - корреляционная обработка принятого эхосигнала и параллельная обработка в широкой полосе этого же сигнала позволяют выделить классификационные признаки, обеспечивающие решение задачи классификации обнаруженной цели на классы надводная или подводная.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидролокационный способ классификации с использованием псевдошумового сигнала | 2020 |
|
RU2735929C1 |
| Гидроакустический способ определения параметров цели при использовании взрывного сигнала с беспроводной системой связи | 2018 |
|
RU2692841C1 |
| Гидролокационный способ обнаружения объекта и измерения его параметров | 2018 |
|
RU2697937C1 |
| Способ определения параметров цели гидролокатором | 2017 |
|
RU2650835C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ СИГНАЛА ОТ ЦЕЛИ | 2011 |
|
RU2473924C1 |
| СПОСОБ ОБРАБОТКИ ЭХОСИГНАЛА ГИДРОЛОКАТОРА | 2013 |
|
RU2528556C1 |
| Гидролокационный способ обнаружения объекта и измерения его параметров | 2017 |
|
RU2674552C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ ОБЪЕКТА В ВОДНОЙ СРЕДЕ | 2015 |
|
RU2602759C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЛУБИНЫ ОБЪЕКТА И ГИДРОЛОКАТОРОМ | 2013 |
|
RU2527136C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛОКАЛЬНОГО ОБЪЕКТА НА ФОНЕ РАСПРЕДЕЛЕННОЙ ПОМЕХИ | 2016 |
|
RU2634787C1 |
Использование: изобретение относится к области гидроакустики и может быть использовано для построения систем автоматического обнаружения эхосигналов, принятых гидролокатором на фоне шумовой и реверберационной помехи, и его классификации при использовании псевдошумовых сигналов. Технический результат: расширение списка классифицируемых объектов. Сущность: для обеспечения этого технического результата предложен способ классификации объектов, содержащий излучение зондирующего псевдошумового сигнала, прием эхосигнала, проведение оптимальной многоканальной корреляционной обработки, включающей измерение помехи, измерение амплитуды корреляционных функций, выбор корреляционной функции с максимальной амплитудой Амакс, определение временного положения ТАмакс максимума корреляционной функции, одновременно сопоставляют результат взаимно-корреляционной обработки с максимальной амплитудой Амакс и реализацию входного сигнала до обработки в широкой полосе, принимают ТАмакс за время окончания принятого сигнала на входе Ток, определяют среднее значение помехи Апом и порог в широкой полосе, последовательно во времени измеряют амплитуды временных реализаций в широкой полосе частот, превысившие порог, и определяют временное положение амплитуды первой реализации, превысившей порог Тнач, определяют временное положение конечной амплитуды, превысившей порог Ткон, и определяют разность (Ткон - Тнач), при этом, если (Ткон - Тнач)>2Тсиг, где Тсиг - длительность зондирующего сигнала, определяют разность (Тнач - Ток), и если (Тнач - Ток)≤0,1Тсиг, принимают решение, что цель надводная, если (Тнач - Ток)>0,1Тсиг, принимают решение, что цель подводная. 1 ил. 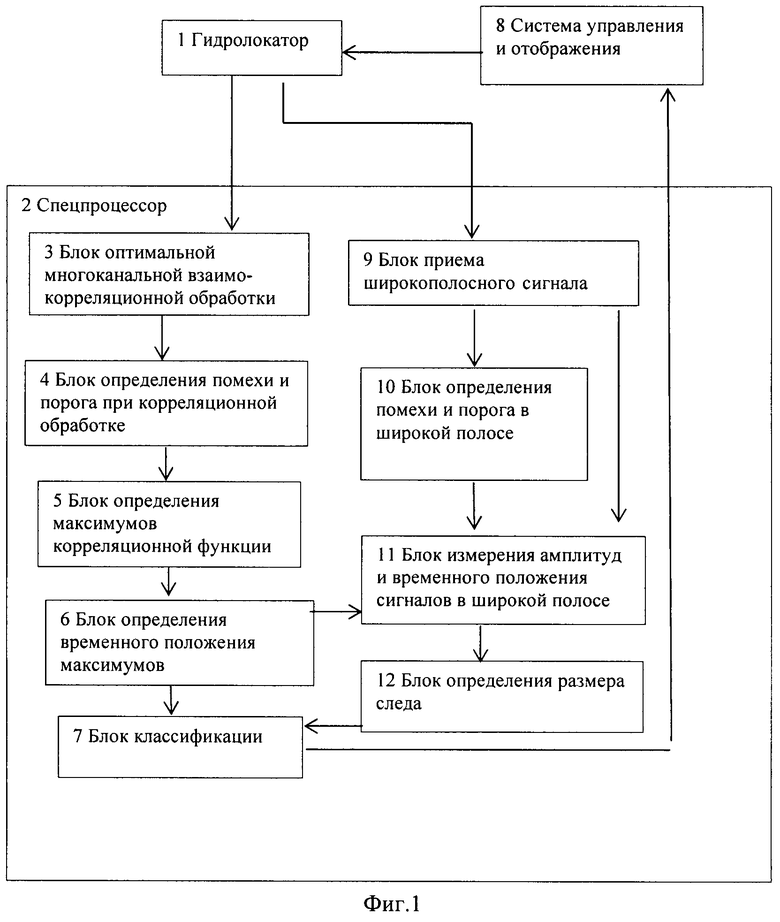
Гидролокационный способ классификации объектов, содержащий излучение зондирующего псевдошумового сигнала, прием эхосигнала, проведение оптимальной многоканальной корреляционной обработки, включающей измерение помехи, измерение амплитуды корреляционных функций, выбор корреляционной функции с максимальной амплитудой Амакс, определение временного положения ТАмакс максимума корреляционной функции, отличающийся тем, что одновременно сопоставляют результат взаимно-корреляционной обработки с максимальной амплитудой Амакс и реализацию входного сигнала до обработки в широкой полосе, принимают ТАмакс за время окончания принятого сигнала на входе Ток, определяют среднее значение помехи Апом и порог в широкой полосе, последовательно во времени измеряют амплитуды временных реализаций в широкой полосе частот, превысившие порог, и определяют временное положение амплитуды первой реализации, превысившей порог Тнач, определяют временное положение конечной амплитуды, превысившей порог Ткон, и определяют разность (Ткон - Тнач), при этом, если (Ткон - Тнач)>2Тсиг, где Тсиг длительность зондирующего сигнала, определяют разность (Тнач - Ток), и если (Тнач - Ток)≤0,1Тсиг, принимают решение, что цель надводная, если (Тнач - Ток)>0,1Тсиг, принимают решение - цель подводная.
| Гидролокационный способ классификации с использованием псевдошумового сигнала | 2020 |
|
RU2735929C1 |
| Гидролокационный способ обнаружения объекта и измерения его параметров | 2017 |
|
RU2674552C1 |
| В.Г | |||
| Тимошенков "Влияние газосодержащей среды на неопределенность решения задачи классификации" // НТС Гидроакустика, вып | |||
| Приспособление для автоматической односторонней разгрузки железнодорожных платформ | 1921 |
|
SU48A1 |
| Способ измерения скорости движения цели гидролокатором | 2017 |
|
RU2658528C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ ОБЪЕКТА В ВОДНОЙ СРЕДЕ | 2015 |
|
RU2602759C1 |
| СПОСОБ ОБРАБОТКИ ГИДРОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2013 |
|
RU2529441C1 |
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ НЕПОДВИЖНОГО ОБЪЕКТА | 2015 |
|
RU2590932C1 |
| US 20110128820 A1, 02.06.2011. | |||

