Предлагаемые технические решения относятся к области радиолокации, а также автоматики и могут быть использованы для фильтрации параметров траекторий радиолокационных объектов, а также других случайных процессов. Под фильтрацией параметров траектории объекта (ТО) здесь понимается процесс оценки текущих значений координат (например, дальности, угла места, азимута), полученных в результате обработки их последовательных измерений в процессе сопровождения объекта, изменяющихся во времени и искаженных помехами и ошибками измерений [см., например, Л.2, Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации, М.: Радио и связь, 1986, стр.140, разд. 4.1; стр.145, разд. 4.3].
Известен способ фильтрации линейно изменяющихся координат сопровождаемого радиолокационного объекта с помощью неравноточного и неравнодискретного фильтра табличного сглаживания [Л.1, Апорович В.А. Неравноточный и неравнодискретный фильтр табличного сглаживания координат. Радиотехника №3, 1997, стр.42-45].
Способ заключается в том, что в известном оптимальном фильтре для линейно изменяющихся координат (фильтр Калмана) [Л.1, стр.42, формулы (1)] коэффициенты сглаживания фильтра выбираются из заранее составленных и запомненных таблиц значений этих коэффициентов в зависимости от текущих дискретности измерений во времени и ошибок измерений.
Недостатком известного способа является невозможность априорного задания таблиц коэффициентов сглаживания при фильтрации координат маневрирующих объектов, когда координаты изменяются во времени по нелинейным и заранее неизвестным законам. Недостатком является также необходимость априорного знания и запоминания в виде исходных данных текущих ошибок измерений.
Известны способ и устройство адаптивной фильтрации параметров траектории маневрирующего объекта на основе байесовского подхода [Л.2, Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации, М.: Радио и связь, 1986, стр.179-181, пункты 1-10, рис.4.10]. Способ заключается в том, что оценки параметров определяются путем взвешенного усреднения оценок, полученных в результате фильтрации координат при заданном ряде фиксированных значений возмущающего параметра (возмущающий параметр - это, например, ускорение по координате, вызванное маневром объекта). Каждую из оценок координат при фиксированном значении возмущающего параметра получают с помощью рекуррентного линейного фильтра (фильтра Калмана) [Л.2, стр.177]. При этом на каждом шаге по выборке измерений вычисляют апостериорную плотность вероятности возмущающего параметра и используют эту плотность для получения взвешенных оценок.
Устройство, реализующее описанный способ адаптивной фильтрации, состоит из m+1 (m - количество заданных дискретных значений возмущающего параметра) параллельно включенных фильтров Калмана, каждый из которых настроен на одно из возможных дискретных значений возмущающего параметра [Л.2, стр.180-181, рис.4.10]. Результирующая оценка фильтруемых параметров получается как взвешенная сумма оценок на выходах этих фильтров.
Недостатками способа и устройства являются большой объем вычислений и сложность реализации, необходимость знания целого ряда априорной информации, например дисперсий ошибок измерений [Л.2, стр.179, п.4], которые в реальных условиях, в общем случае, неизвестны и значительно меняются в зависимости от условий работы РЛС, а также различаются для разных типов объектов (например, из-за различий в величине и характере флуктуаций эффективной поверхности рассеяния (ЭПР)) и т.п. Параметры маневра и его предлагаемое статистическое описание [Л.2, стр.176-177], используемые в известных способе и устройстве, определяются с достаточно большими ошибками и могут не совпадать с действительными. Таким образом, известные способ и устройство адаптивной фильтрации в реальных условиях будут работать с ошибками, не соизмеримыми со сложностью их реализации [Л.2, стр.182, рис.4.12, непрерывные кривые].
Известны также способ и устройство фильтрации параметров ТО («скользящего» сглаживания), изменяющихся по квадратичному закону (полином 2-й степени) [Л.3, Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации, М.: Советское радио, 1974, стр.391-393, формулы 9.6.26, рис.9.14]. Недостатком данных способа и устройства является возрастание ошибок фильтрации при маневре объекта и отклонении закона изменения координат от квадратичного, когда координаты объекта изменяются по более сложным законам (полином выше второй степени). В реальных ситуациях такие отклонения практически всегда имеют место, особенно в случае маневрирующих объектов.
Наиболее близким к заявляемому способу является способ фильтрации параметров линейной траектории объекта с помощью «скользящего» сглаживания (α,β-фильтрация) [Л.3, стр.383, формулы 9.6.1; стр.351, формулы 9.3.22 и 9.3.23; стр.385, условия устойчивости α,β-фильтра, пункт а], [Л.2, стр.166, формулы 4.65, 4.66 и формулы для An, Bn (или, что то же самое, α, β); стр.169, пункт 3].
Способ заключается в следующем. Производят измерение параметров ТО, поступающих последовательно и равнодискретно во времени с постоянным интервалом времени между измерениями Т. При этом осуществляют счет номера измерения n=1, 2, 3, .... По первым двум измерениям (n=1, 2) параметров ТО u1 и u2 определяют скорость изменения параметра ТО

где  - несглаженное,
- несглаженное,  - сглаженное значения скорости.
- сглаженное значения скорости.
Измеренные значения параметра ТО u2 и скорости  являются начальными значениями, с которых начинается фильтрация по способу «скользящего» сглаживания (в Л.3 начальные значения обозначены как
являются начальными значениями, с которых начинается фильтрация по способу «скользящего» сглаживания (в Л.3 начальные значения обозначены как  ,
,  ). Таким образом, начальные измеренные значения (при n=2) параметра ТО u2 и скорости его изменения
). Таким образом, начальные измеренные значения (при n=2) параметра ТО u2 и скорости его изменения  одновременно являются и соответствующими сглаженными значениями
одновременно являются и соответствующими сглаженными значениями  и
и 
Во всех последующих измерениях, начиная с третьего измерения, производят аналогично повторяющиеся действия, которые заключаются в том, что определяют экстраполированное значение параметра ТО для n-го измерения  путем суммирования предыдущего сглаженного значения параметра ТО (n-1)-го измерения
путем суммирования предыдущего сглаженного значения параметра ТО (n-1)-го измерения  с величиной произведения предыдущего сглаженного значения скорости изменения параметра ТО
с величиной произведения предыдущего сглаженного значения скорости изменения параметра ТО  и величины интервала времени между измерениями (Т=const)
и величины интервала времени между измерениями (Т=const)

определяют величину сигнала ошибки  между текущим измеренным значением параметра ТО un и экстраполированным значением параметра ТО
между текущим измеренным значением параметра ТО un и экстраполированным значением параметра ТО

определяют коэффициенты сглаживания α и β в зависимости только от номера измерения n по формулам


αОГР, βОГР - ограниченные снизу (минимально допустимые) значения коэффициентов α и β, которые необходимы для того, чтобы с ростом номера измерения n эти коэффициенты не стали столь малыми по величине, что в результате прекратилось бы реагирование на случайные колебания параметра ТО вокруг заданной траектории [Л.3, стр.382, разд. 9.6, первый абзац сверху, второй абзац снизу];
np - «память» фильтра (номер измерения, после которого коэффициенты α и β фиксируются на постоянном уровне αОГР, βОГР), например np=7, αОГР=0.3, βОГР=0.12.
По измеренным текущим значениям параметра ТО un, величине сигнала ошибки  и полученным значениям коэффициентов сглаживания α и β определяют текущее сглаженное значение параметра ТО
и полученным значениям коэффициентов сглаживания α и β определяют текущее сглаженное значение параметра ТО  путем суммирования экстраполированного значения параметра ТО и взвешенного коэффициентом сглаживания α величины сигнала ошибки
путем суммирования экстраполированного значения параметра ТО и взвешенного коэффициентом сглаживания α величины сигнала ошибки

и определяют текущее сглаженное значение скорости изменения параметра ТО  путем суммирования предыдущего сглаженного значения скорости
путем суммирования предыдущего сглаженного значения скорости  и величины сигнала ошибки, взвешенного коэффициентом β/T
и величины сигнала ошибки, взвешенного коэффициентом β/T

Недостатком наиболее близкого способа фильтрации параметров траектории объекта является возрастание ошибок фильтрации при отклонении закона изменения параметра во времени от линейного, особенно в случае маневрирующих объектов. Недостатком являются также требование равнодискретности измерений параметров ТО (интервал времени между измерениями является постоянным Т=const) и условие равноточности измерений параметров ТО (все ошибки измерений считаются одинаковыми по величине), что на практике в большинстве случаев не выполняется.
Наиболее близким устройством к заявленному техническому решению является известное устройство фильтрации параметров ТО, реализующее указанный выше способ «скользящего» сглаживания параметров ТО [Л.3, стр.383, рис.9.10].
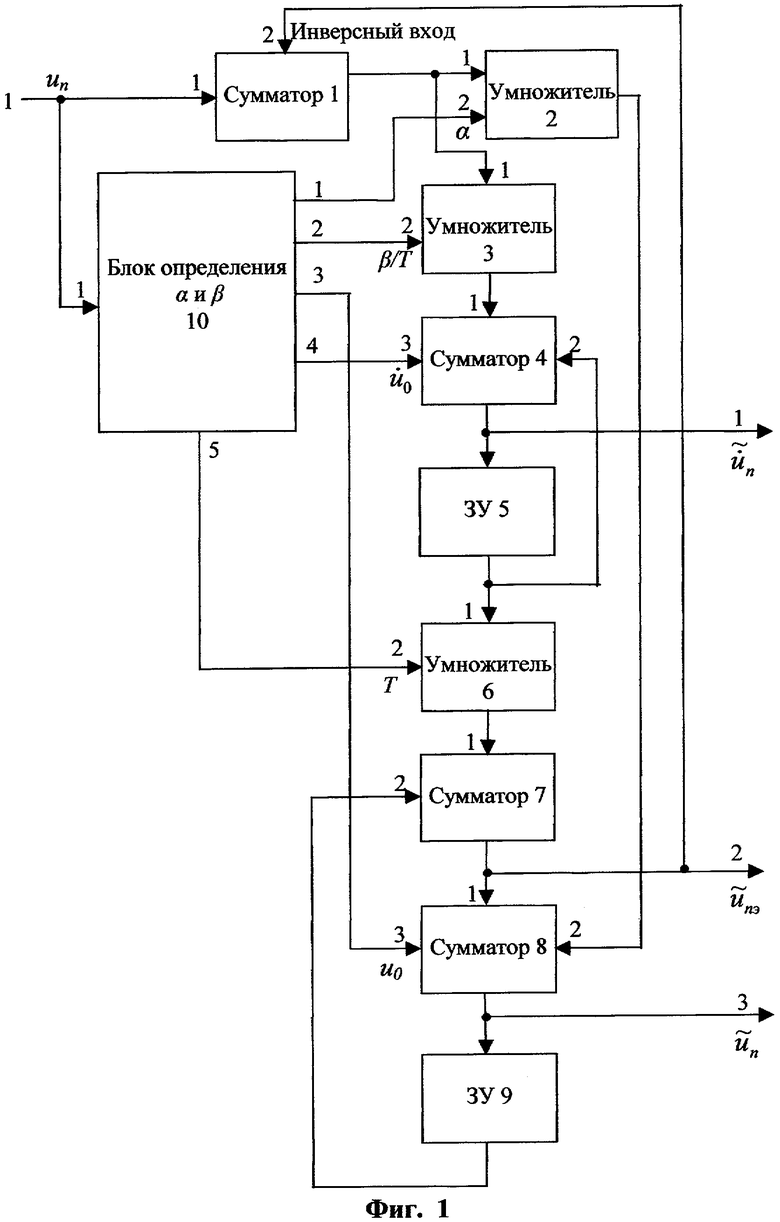
Устройство (фиг.1) содержит четыре сумматора 1, 4, 7, 8, три умножителя 2, 3, 6, два запоминающих устройства (ЗУ) 5, 9 и блок определения α и β 10, причем первый вход сумматора 1 и первый вход блока определения α и β 10 соединены между собой и являются первым входом устройства, второй инверсный вход сумматора 1 подключен к выходу сумматора 7, а выход соединен параллельно с первыми входами умножителей 2 и 3, второй вход умножителя 2 соединен с первым выходом блока определения α и β 10, а выход соединен со вторым входом сумматора 8, второй вход умножителя 3 соединен со вторым выходом блока определения α и β 10, а выход соединен с первым входом сумматора 4, второй вход которого подключен к выходу ЗУ 5, третий вход соединен с четвертым выходом блока определения α и β 10, а выход является первым выходом устройства и подключен к входу ЗУ 5, выход которого соединен с первым входом умножителя 6, второй вход которого соединен с пятым выходом блока определения α и β 10, а выход соединен с первым входом сумматора 7, второй вход которого подключен к выходу ЗУ 9, а выход является вторым выходом устройства и подключен к первому входу сумматора 8, третий вход которого соединен с третьим выходом блока определения α и β 10, а выход соединен с входом ЗУ 9 и является третьим выходом устройства.
Блок определения α и β 10 (фиг.2) содержит вычислитель 11 и ЗУ 12, причем первый вход вычислителя 11 и первый вход ЗУ 12 соединены между собой и являются первым входом блока определения α и β 10, второй, третий, четвертый входы вычислителя 11 соединены соответственно с первым, вторым и третьим выходами ЗУ 12, пятый вход вычислителя 11 соединен с четвертым выходом ЗУ 12 и является пятым выходом блока определения α и β 10, первый, второй, третий, четвертый выходы вычислителя 11 являются соответственно первым, вторым, третьим и четвертым выходами блока определения α и β 10.
Устройство фильтрации параметров ТО работает следующим образом. На первый вход устройства подаются измеренные значения параметра ТО un. В блоке определения α и β 10 определяется номер измерения n=1, 2, 3, ... путем счета числа поступлений величины un.
Первые два измерения являются подготовительными для формирования начальных значений: , . При поступлении первого измеренного значения параметра ТО u1 на первый вход устройства фильтрации параметров ТО оно передается на первый вход блока определения коэффициентов ее α и β 10, где это значение запоминается в ЗУ 12. При поступлении второго измерения параметра ТО u2 в вычислителе 11 блока определения α и β 10 определяется скорость изменения параметра ТО  , для чего используются хранящиеся в ЗУ 12 значение первого измерения параметра ТО u1 и константа Т - интервал времени между измерениями. Полученные величины
, для чего используются хранящиеся в ЗУ 12 значение первого измерения параметра ТО u1 и константа Т - интервал времени между измерениями. Полученные величины  ,
,  являются начальными значениями для инициации процесса фильтрации и поступают с третьего и четвертого выходов блока определения α и β 10, соответственно, на третий вход сумматора 8 и третий вход сумматора 4. Значение передается на третий выход устройства фильтрации параметров ТО, значение скорости изменения параметра ТО
являются начальными значениями для инициации процесса фильтрации и поступают с третьего и четвертого выходов блока определения α и β 10, соответственно, на третий вход сумматора 8 и третий вход сумматора 4. Значение передается на третий выход устройства фильтрации параметров ТО, значение скорости изменения параметра ТО  передается на первый выход устройства фильтрации параметров ТО.
передается на первый выход устройства фильтрации параметров ТО.
Начиная с третьего измерения устройство фильтрации параметров ТО работает следующим образом. В вычислителе 11 начальные значения обнуляются (u0=0,  ), и во всех последующих измерениях, начиная с третьего измерения, на третьи входы сумматоров 4 и 8 подаются нулевые значения. В сумматоре 7 определяется экстраполированное значение параметра ТО
), и во всех последующих измерениях, начиная с третьего измерения, на третьи входы сумматоров 4 и 8 подаются нулевые значения. В сумматоре 7 определяется экстраполированное значение параметра ТО  путем суммирования предыдущего сглаженного значения параметра ТО
путем суммирования предыдущего сглаженного значения параметра ТО  , поступающего с выхода ЗУ 9 на второй вход сумматора 7, и величины
, поступающего с выхода ЗУ 9 на второй вход сумматора 7, и величины  , поступающей с выхода умножителя 6 на первый вход сумматора 7.
, поступающей с выхода умножителя 6 на первый вход сумматора 7.
В сумматоре 1 определяется сигнал ошибки  путем суммирования текущего измеренного значения параметра ТО un, поступающего на первый вход сумматора 1 и экстраполированного значения параметра ТО
путем суммирования текущего измеренного значения параметра ТО un, поступающего на первый вход сумматора 1 и экстраполированного значения параметра ТО  , поступающего с выхода сумматора 7 на инверсный второй вход сумматора 1.
, поступающего с выхода сумматора 7 на инверсный второй вход сумматора 1.
В это же время в блоке определения α и β 10 в соответствии с определенным в вычислителе 11 номером измерения определяются коэффициенты сглаживания α и β согласно формулам (4, 5). Для этого используются хранящиеся в ЗУ 12 коэффициенты αОГР, βОГР и интервал времени между измерениями Т.
С выхода сумматора 1 сигнал ошибки подается на первые входы умножителей 2 и 3, на вторые входы которых с первого и второго выходов блока 10 поступают соответственно величины α и β/T.
Взвешенный коэффициентом α сигнал ошибки с выхода умножителя 2 поступает на второй вход сумматора 8, на первый вход которого с выхода сумматора 7 поступает экстраполированное значение параметра ТО . В результате суммирования с выхода сумматора 8 снимается текущее сглаженное значение параметра ТО  .
.
С выхода умножителя 3 сигнал ошибки, взвешенный величиной β/T, подается на первый вход сумматора 4, на второй вход которого с выхода ЗУ 5 поступает величина  . В результате на выходе сумматора 4 снимается текущее сглаженное значение скорости изменения параметра ТО
. В результате на выходе сумматора 4 снимается текущее сглаженное значение скорости изменения параметра ТО 
Текущие сглаженные значения  , , подаются на первый, второй и третий выходы устройства фильтрации параметров ТО соответственно.
, , подаются на первый, второй и третий выходы устройства фильтрации параметров ТО соответственно.
В результате работы устройства реализуется известный способ фильтрации параметров ТО («скользящего» сглаживания линейной траектории или α,β-фильтрация), описываемый формулами 1-7.
Недостатком наиболее близкого устройства фильтрации параметров ТО является возрастание ошибок фильтрации при отклонении закона изменения параметра ТО во времени от линейного, особенно в случае маневрирующих объектов. Недостатком являются также требование равнодискретности и условие равноточности измерений параметров ТО.
Таким образом, техническим результатом (решаемой задачей) предлагаемых технических решений является уменьшение ошибок фильтрации параметров ТО в условиях, когда параметры ТО изменяются по неизвестным, в общем случае нелинейным, законам (например, при маневре объекта), а измерения проводятся с постоянной или переменной дискретностью и разными неизвестными ошибками измерений параметров ТО.
Технический результат достигается тем, что в известном способе фильтрации параметров ТО, основанном на фильтрации методом «скользящего сглаживания», при котором предварительно осуществляют измерение текущего параметра ТО un, где n - номер измерения (n=1, 2, 3, ...), при этом по первым двум измерениям (n=1 и n=2) определяют скорость изменения параметра ТО путем деления разности значений параметров ТО, полученных во втором и первом измерениях, на величину текущего интервала времени между измерениями Tn, для n=2 задают начальные значения коэффициентов сглаживания α=1 и β=1, далее, во всех последующих измерениях (n=3, 4, 5, ...), определяют экстраполированное значение параметра ТО для n-го измерения путем суммирования предыдущего сглаженного значения параметра ТО n-1-го измерения  с величиной произведения предыдущего сглаженного значения скорости изменения параметра ТО n-1-го измерения
с величиной произведения предыдущего сглаженного значения скорости изменения параметра ТО n-1-го измерения  и величины текущего интервала времени между измерениями Tn, определяют сигнал ошибки
и величины текущего интервала времени между измерениями Tn, определяют сигнал ошибки  между текущим измеренным значением параметра ТО un и экстраполированным значением параметра ТО , определяют коэффициенты сглаживания α и β, определяют текущее сглаженное значение параметра ТО путем суммирования экстраполированного значения параметра ТО и взвешенного коэффициентом сглаживания α сигнала ошибки, определяют текущее сглаженное значение скорости изменения параметра ТО
между текущим измеренным значением параметра ТО un и экстраполированным значением параметра ТО , определяют коэффициенты сглаживания α и β, определяют текущее сглаженное значение параметра ТО путем суммирования экстраполированного значения параметра ТО и взвешенного коэффициентом сглаживания α сигнала ошибки, определяют текущее сглаженное значение скорости изменения параметра ТО  путем суммирования предыдущего сглаженного значения скорости изменения параметра ТО
путем суммирования предыдущего сглаженного значения скорости изменения параметра ТО  и сигнала ошибки, взвешенного величиной β/Tn, согласно изобретению, текущий интервал времени между измерениями определяют по формуле Tn=tn-tn-1, где tn, tn-1 - соответственно время текущего n-го и время предыдущего (n-1)-го измерений (n=2, 3, 4, ...), а для определения коэффициентов сглаживания α и β при каждом текущем измерении параметра ТО, начиная с третьего измерения (n=3, 4, 5, ...), дополнительно определяют: абсолютную величину отклонения текущего сглаженного значения параметра ТО от экстраполированного n-го значения параметра ТО , абсолютную величину отклонения текущего сглаженного значения скорости изменения параметра ТО
и сигнала ошибки, взвешенного величиной β/Tn, согласно изобретению, текущий интервал времени между измерениями определяют по формуле Tn=tn-tn-1, где tn, tn-1 - соответственно время текущего n-го и время предыдущего (n-1)-го измерений (n=2, 3, 4, ...), а для определения коэффициентов сглаживания α и β при каждом текущем измерении параметра ТО, начиная с третьего измерения (n=3, 4, 5, ...), дополнительно определяют: абсолютную величину отклонения текущего сглаженного значения параметра ТО от экстраполированного n-го значения параметра ТО , абсолютную величину отклонения текущего сглаженного значения скорости изменения параметра ТО  от предыдущего сглаженного значения скорости изменения параметра ТО и, используя полученные абсолютные величины отклонений, в каждом текущем n-ом измерении определяют коэффициенты сглаживания α и β по формулам
от предыдущего сглаженного значения скорости изменения параметра ТО и, используя полученные абсолютные величины отклонений, в каждом текущем n-ом измерении определяют коэффициенты сглаживания α и β по формулам


если α>αmax, то α=αmax,
если β>βmax, то β=βmax,
где n=3, 4, 5, ...,
 - абсолютная величина отклонения текущего сглаженного значения параметра ТО от экстраполированного n-го значения параметра ТО
- абсолютная величина отклонения текущего сглаженного значения параметра ТО от экстраполированного n-го значения параметра ТО 

 - абсолютная величина отклонения текущего сглаженного значения скорости изменения параметра ТО
- абсолютная величина отклонения текущего сглаженного значения скорости изменения параметра ТО  от предыдущего сглаженного значения скорости изменения параметра ТО
от предыдущего сглаженного значения скорости изменения параметра ТО  ,
,

 - абсолютная величина сигнала ошибки
- абсолютная величина сигнала ошибки

α0, β0 - константы, задающие минимально допустимые значения коэффициентов сглаживания α и β,
αmax, βmax - константы, задающие максимально допустимые значения коэффициентов α и β,
δu - константа, выбираемая из условия  ,
,
при этом полученные коэффициенты α и β запоминают и используют для фильтрации параметра ТО при следующем n+1-ом измерении с соответствующим значением интервала времени Tn+1=tn+1-tn
или в каждом текущем n-ом измерении определяют коэффициенты сглаживания по формулам


где n=3, 4, 5, ...,
α0, β0 - константы, задающие минимально допустимые значения коэффициентов сглаживания α и β,
kα, kβ - заданные коэффициенты, определяемые из условий требуемой скорости изменения коэффициентов сглаживания, соответственно α и β, в зависимости от абсолютной величины сигнала ошибки  ,
,
θu - константа, определяющая величину разрешающей способности по измеряемому параметру ТО,
при этом полученные коэффициенты α и β используют для фильтрации параметра ТО в текущем n-ом измерении с текущим значением интервала времени Tn=tn-tn-1.
Технический результат достигается также тем, что в известное устройство, реализующее способ фильтрации параметров траектории объекта, и содержащее четыре сумматора, три умножителя, два запоминающих устройства (ЗУ) и блок определения α и β, причем первый вход первого сумматора и первый вход блока определения α и β соединены между собой и являются первым входом устройства, второй инверсный вход первого сумматора подключен к выходу третьего сумматора, а выход соединен параллельно с первыми входами первого и второго умножителей, второй вход первого умножителя соединен с первым выходом блока определения α и β, a выход соединен со вторым входом четвертого сумматора, второй вход второго умножителя соединен со вторым выходом блока определения α и β, а выход соединен с первым входом второго сумматора, второй вход которого подключен к выходу первого ЗУ, третий вход соединен с четвертым выходом блока определения α и β, а выход является первым выходом устройства и подключен к входу первого ЗУ, выход которого соединен с первым входом третьего умножителя, второй вход которого соединен с пятым выходом блока определения α и β, а выход соединен с первым входом третьего сумматора, второй вход которого подключен к выходу второго ЗУ, а выход является вторым выходом устройства и подключен к первому входу четвертого сумматора, третий вход которого соединен с третьим выходом блока определения α и β, а выход соединен с входом второго ЗУ и является третьим выходом устройства, при этом блок определения α и β содержит вычислитель и ЗУ, причем первый вход вычислителя и первый вход ЗУ блока определения α и β соединены между собой и являются первым входом блока определения α и β, второй, третий, четвертый, пятый входы вычислителя соединены соответственно с первым, вторым, третьим и четвертым выходами ЗУ блока определения α и β, первый выход вычислителя, а также второй, третий и четвертый выходы вычислителя, которые являются соответственно вторым, третьим и четвертым выходами блока определения α и β, согласно изобретению, введены второй, третий, четвертый, пятый, шестой и седьмой входы блока определения α и β, причем второй вход блока определения α и β является вторым входом устройства, третий вход соединен с выходом четвертого сумматора, четвертый вход соединен с выходом третьего сумматора, пятый вход соединен с выходом первого ЗУ, шестой вход соединен с выходом второго сумматора, седьмой вход соединен с выходом первого сумматора, а в вычислитель блока определения α и β введены шестой, седьмой, восьмой, девятый, десятый, одиннадцатый, двенадцатый, тринадцатый, четырнадцатый, пятнадцатый входы, а также пятый и шестой выходы, в ЗУ блока определения α и β введены второй, третий, четвертый входы, а также пятый, шестой, седьмой, восьмой и девятый выходы, причем шестой, седьмой, восьмой, девятый входы вычислителя соединены соответственно с пятым, шестым, седьмым и восьмым выходами ЗУ блока определения α и β, десятый вход вычислителя и второй вход ЗУ блока определения α и β соединены между собой и являются вторым входом блока определения α и β, одиннадцатый, двенадцатый, тринадцатый, четырнадцатый, пятнадцатый входы вычислителя являются соответственно третьим, четвертым, пятым, шестым и седьмым входами блока определения α и β, первый выход вычислителя соединен с третьим входом ЗУ блока определения α и β, пятый выход вычислителя является пятым выходом блока определения α и β, шестой выход вычислителя соединен с четвертым входом ЗУ блока определения α и β, девятый выход которого является первым выходом блока определения α и β.
Поясним суть предлагаемого способа. При сопровождении маневрирующих объектов, а также в случае сопровождения объектов в полярной системе координат (даже при равномерном прямолинейном движении) параметры (координаты) траектории объекта изменяются по нелинейным и заранее неизвестным законам. Текущие ошибки измерения при этом также неизвестны. Поскольку в указанных выше известных способах фильтрации законы изменения параметров ТО заранее предопределены, а ошибки измерений заданы априори, то при несовпадении реально действующих в текущий момент времени законов изменения параметров ТО и ошибок измерения с априорно заданными ошибки фильтрации параметров ТО возрастают. Для того чтобы уменьшить ошибки фильтрации параметров ТО, необходимо реализовать механизм адаптации к текущим условиям фильтрации. В частности, такой механизм можно реализовать, если в каждый текущий момент времени подстраивать коэффициенты сглаживания α и β к текущим условиям фильтрации. Это и достигается в предлагаемом способе за счет введения дополнительных действий по определению абсолютных величин отклонений текущего сглаженного значения параметра ТО от экстраполированного значения параметра ТО, текущего сглаженного значения скорости изменения параметра ТО от предыдущего сглаженного значения скорости изменения параметра ТО, а также за счет использования абсолютной величины сигнала ошибки (соответственно  ,
,  и
и  ), которые выступают в роли «сигналов ошибок» текущего сглаженного параметра ТО, текущей сглаженной скорости изменения параметра ТО и текущего измеренного параметра ТО соответственно. Указанные абсолютные величины отклонений зависят от действующих в данный момент времени закона изменения параметра ТО во времени, дискретности измерений и ошибок измерений. Так как абсолютные величины отклонений изменяются и контролируются при каждом измерении, то изменяются соответственно и определенные с их помощью коэффициенты α и β. Коэффициенты сглаживания подстраиваются (адаптируются) таким образом к текущим условиям фильтрации параметров ТО.
), которые выступают в роли «сигналов ошибок» текущего сглаженного параметра ТО, текущей сглаженной скорости изменения параметра ТО и текущего измеренного параметра ТО соответственно. Указанные абсолютные величины отклонений зависят от действующих в данный момент времени закона изменения параметра ТО во времени, дискретности измерений и ошибок измерений. Так как абсолютные величины отклонений изменяются и контролируются при каждом измерении, то изменяются соответственно и определенные с их помощью коэффициенты α и β. Коэффициенты сглаживания подстраиваются (адаптируются) таким образом к текущим условиям фильтрации параметров ТО.
Изобретение иллюстрируется следующими чертежами:
Фиг.1 - структурная схема устройства, наиболее близкого к предлагаемому устройству.
Фиг.2 - структурная схема блока определения α и β в устройстве, наиболее близком к предлагаемому устройству.
Фиг.3 - структурная схема предлагаемого устройства.
Фиг.4 - структурная схема блока определения α и β в предлагаемом устройстве.
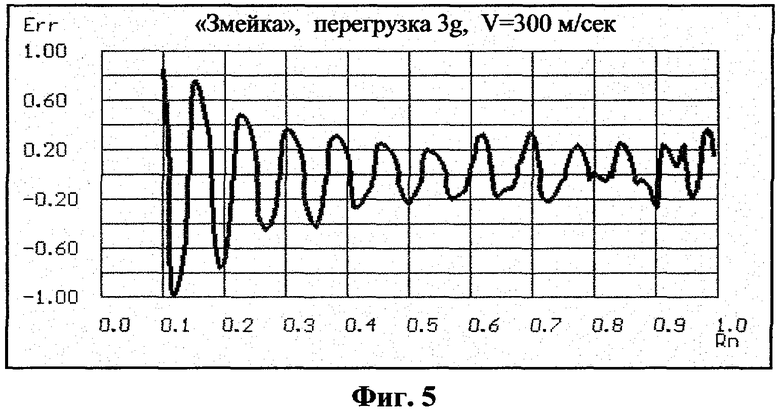
Фиг.5 - приведены нормированные ошибки фильтрации азимута  по известному способу «скользящего» сглаживания параметров траектории объекта, заданной полиномом 2-й степени [Л.3, стр.391] в зависимости от нормированной дальности Rn=R/R0, где
по известному способу «скользящего» сглаживания параметров траектории объекта, заданной полиномом 2-й степени [Л.3, стр.391] в зависимости от нормированной дальности Rn=R/R0, где  - текущая оценка азимута объекта в процессе фильтрации, βист - истинное значение азимута, θβ - ширина диаграммы направленности антенны по азимуту по уровню половинной мощности, R - дальность до объекта, R0 - пороговая дальность обнаружения объекта с ЭПР 1 м2 с вероятностью 0.5. Объект движется со скоростью 300 м/с и совершает маневр типа «змейка» в азимутальной плоскости в направлении на РЛС с перегрузкой 3g, где g=9.78 м/с2 - ускорение свободного падения.
- текущая оценка азимута объекта в процессе фильтрации, βист - истинное значение азимута, θβ - ширина диаграммы направленности антенны по азимуту по уровню половинной мощности, R - дальность до объекта, R0 - пороговая дальность обнаружения объекта с ЭПР 1 м2 с вероятностью 0.5. Объект движется со скоростью 300 м/с и совершает маневр типа «змейка» в азимутальной плоскости в направлении на РЛС с перегрузкой 3g, где g=9.78 м/с2 - ускорение свободного падения.
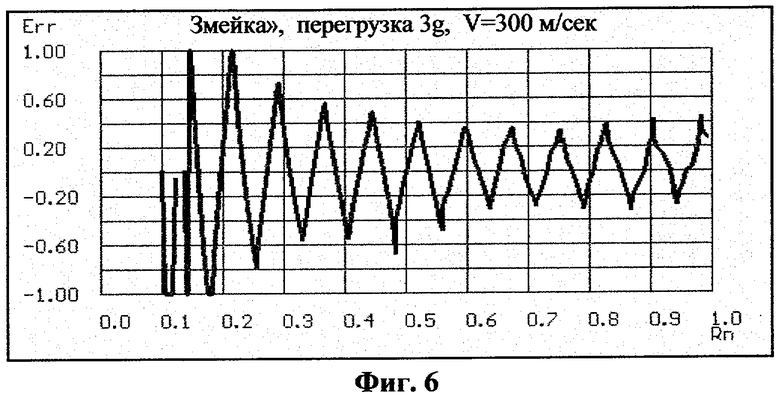
Фиг.6 - нормированные ошибки фильтрации азимута по наиболее близкому известному способу «скользящего» сглаживания параметров линейной траектории [Л.3, стр.383]. Все обозначения и исходные данные такие же, как в предыдущем случае.
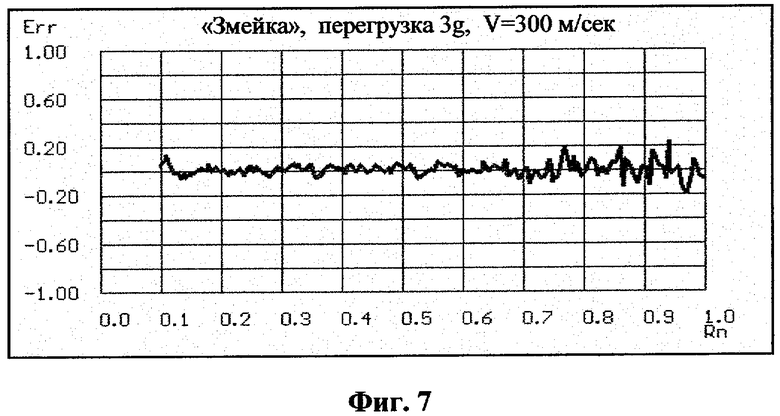
Фиг.7 - нормированные ошибки фильтрации азимута по заявляемому способу. Все обозначения и исходные данные такие же, как в предыдущих случаях.
Предлагаемое устройство, реализующее заявленный способ фильтрации параметров траектории объекта, содержит сумматор 1, умножители 2, 3, сумматор 4, ЗУ 5, умножитель 6, сумматоры 7, 8, ЗУ 9 и блок определения α и β 10, при этом первый вход сумматора 1 и первый вход блока определения α и β 10 соединены между собой и являются первым входом устройства, второй инверсный вход сумматора 1 подключен к выходу сумматора 7, а выход соединен параллельно с первыми входами умножителей 2 и 3 и седьмым входом блока определения α и β 10, второй вход умножителя 2 соединен с первым выходом блока определения α и β 10, а выход подключен ко второму входу сумматора 8, второй вход умножителя 3 соединен со вторым выходом блока определения α и β 10, а выход соединен с первым входом сумматора 4, второй вход которого подключен к выходу ЗУ 5, третий вход соединен с четвертым выходом блока определения α и β 10, а выход, соединенный с шестым входом блока определения α и β 10 и входом ЗУ 5, является первым выходом устройства, выход ЗУ 5 соединен с пятым входом блока определения α и β 10 и первым входом умножителя 6, второй вход которого соединен с пятым выходом блока определения α и β 10, а выход соединен с первым входом сумматора 7, второй вход которого подключен к выходу ЗУ 9, а выход, соединенный с четвертым входом блока определения α и β 10 и первым входом сумматора 8, является вторым выходом устройства, третий вход сумматора 8 соединен с третьим выходом блока определения α и β 10, а выход, соединенный с третьим входом блока определения α и β 10 и входом ЗУ 9, является третьим выходом устройства, второй вход блока определения α и β 10 является вторым входом устройства.
Второй вход блока определения α и β 10 предназначен для приема поступающих значений текущего времени измерений, третий вход блока определения α и β 10 предназначен для приема текущего сглаженного значения параметра ТО, четвертый вход блока определения α и β 10 предназначен для приема экстраполированного значения параметра ТО, пятый вход блока определения α и β 10 предназначен для приема предыдущего сглаженного значения скорости изменения параметра ТО, шестой вход блока определения α и β 10 предназначен для приема текущего сглаженного значения скорости изменения параметра ТО, седьмой вход блока определения α и β 10 предназначен для приема сигнала ошибки.
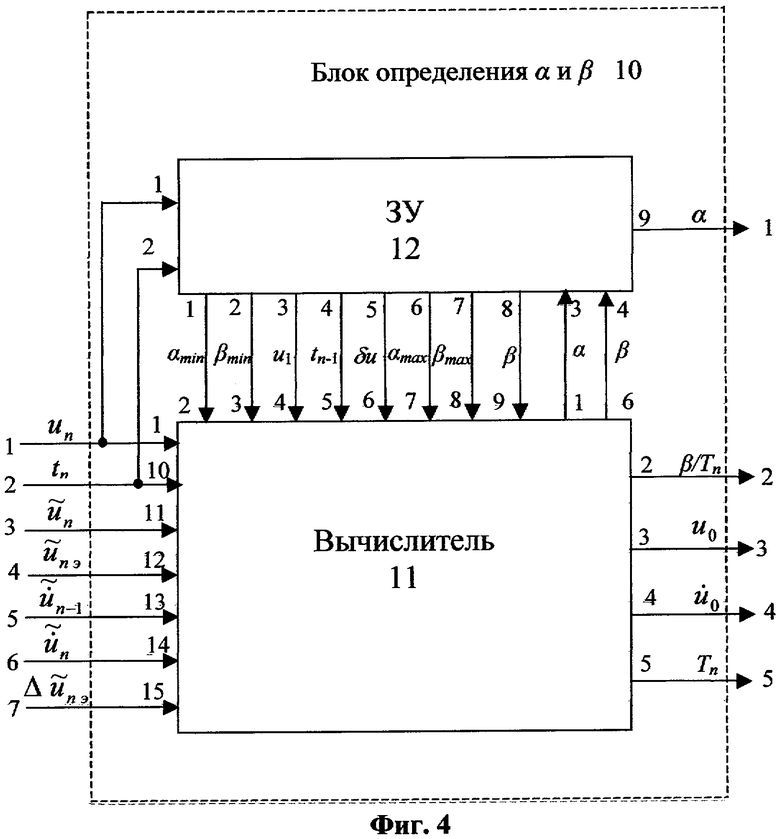
Блок определения α и β 10 предлагаемого устройства содержит вычислитель 11 и ЗУ 12, причем первый вход вычислителя 11 и первый вход ЗУ 12 соединены между собой и являются первым входом блока определения α и β 10, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, входы вычислителя 11 соединены соответственно с первым, вторым, третьим, четвертым, пятым, шестым, седьмым и восьмым выходами ЗУ 12, десятый, одиннадцатый, двенадцатый, тринадцатый, четырнадцатый, пятнадцатый входы вычислителя 12 являются соответственно вторым, третьим, четвертым, пятым, шестым и седьмым входами блока определения α и β 10, первый выход вычислителя 11 соединен с третьим входом ЗУ 12, второй, третий, четвертый, пятый выходы вычислителя 11 являются соответственно вторым, третьим, четвертым, пятым выходами блока определения α и β 10, шестой выход вычислителя 11 соединен с четвертым входом ЗУ 12, второй вход ЗУ 12 подключен ко второму входу блока определения α и β 10, девятый выход ЗУ 12 является первым выходом блока определения α и β 10.
Пятый вход вычислителя 11 предназначен для приема значения предыдущего времени измерения, шестой вход вычислителя 11 предназначен для приема константы δu, седьмой вход вычислителя 11 предназначен для приема максимально допустимого значения коэффициента сглаживания α, восьмой вход вычислителя 11 предназначен для приема максимально допустимого значения коэффициента сглаживания β, девятый вход вычислителя 11 предназначен для приема запомненного предыдущего значения коэффициента сглаживания β, десятый вход вычислителя 11 предназначен для приема текущего времени измерения, одиннадцатый вход вычислителя 11 предназначен для приема текущего сглаженного значения параметра ТО, двенадцатый вход вычислителя 11 предназначен для приема экстраполированного значения параметра ТО, тринадцатый вход вычислителя 11 предназначен для приема предыдущего (полученного в n-1-ом измерении) сглаженного значения скорости изменения параметра ТО, четырнадцатый вход вычислителя 11 предназначен для приема текущего сглаженного значения скорости изменения параметра ТО, пятнадцатый вход вычислителя 11 предназначен для приема сигнала ошибки. Пятый выход вычислителя 11 предназначен для передачи на пятый выход блока определения α и β 10 текущего интервала времени между измерениями, шестой выход вычислителя 11 предназначен для передачи значения коэффициента сглаживания β на четвертый вход ЗУ 12. Второй вход ЗУ 12 предназначен для приема поступающих значений текущего времени измерений, третий вход ЗУ 12 предназначен для приема значений коэффициента сглаживания α, четвертый вход ЗУ 12 предназначен для приема значений коэффициента сглаживания β. Четвертый выход ЗУ 12 предназначен для передачи в вычислитель 11 значения предыдущего времени измерения, пятый выход ЗУ 12 предназначен для передачи в вычислитель 11 константы δu, шестой выход ЗУ 12 предназначен для передачи в вычислитель 11 максимально допустимого значения коэффициента сглаживания α, седьмой выход ЗУ 12 предназначен для передачи в вычислитель 11 максимально допустимого значения коэффициента сглаживания β, восьмой выход ЗУ 12 предназначен для передачи в вычислитель 11 запомненного предыдущего значения коэффициента сглаживания β, девятый выход ЗУ 12 предназначен для передачи запомненного предыдущего значения коэффициента сглаживания α на первый выход блока определения α и β 10.
Цифровые сумматоры 1, 4, 7, 8, умножители 2, 3, 6, а также ЗУ 5 и 9 устройства фильтрации параметров траектории объекта выполнены на стандартных микросхемах [Пухальский Г.И., Новосельцева Т.Я. Проектирование дискретных устройств на интегральных микросхемах. М.: Радио и связь, 1990, стр.131-170].
Блок определения α и β 10 выполнен с помощью вычислителя 11 на стандартном вычислительном процессоре типа Pentium или Celeron и запоминающего устройства 12 на стандартных микросхемах (М. Гук. Аппаратные средства IBM PC, С-Пб.: Издательский дом «Питер», 2002, с.227-228; Пухальский Г.И., Новосельцева Т.Я. Проектирование дискретных устройств на интегральных микросхемах. М.: Радио и связь, 1990, стр.157-170).
Блок определения α и β 10 определяет величины α и β/Тn и временной интервал Tn.
Предлагаемое устройство, реализующее заявленный способ фильтрации параметров траектории объекта, работает следующим образом (здесь описана работа устройства с использованием формул 8, 9).
На первый вход устройства фильтрации подаются измеренные значения параметра un, а на второй вход устройства фильтрации поступает текущее время n-го измерения tn. В блоке определения α и β 10 определяются номер измерения n=1, 2, 3, ... путем счета числа поступлений величин un, а также для n=1, 3, 4, ... текущий интервал времени между измерениями Tn=tn-tn-1.
Первые два измерения являются подготовительными для формирования начальных значений: , . Кроме того, в блоке определения α и β 10 (в ЗУ 12) для n=1 задаются начальные значения коэффициентов сглаживания α=1 и β=1.
При поступлении первого измеренного значения параметра ТО u1 на первый вход устройства фильтрации параметров ТО оно передается на первый вход блока определения коэффициентов α и β 10, где это значение запоминается в ЗУ 12. При поступлении второго измерения параметра ТО u2 в вычислителе 11 блока определения α и β 10 определяется скорость изменения параметра ТО  , для чего используются хранящиеся в ЗУ 12 значение первого измерения u1 и определенная в вычислителе 11 величина Tn - текущий интервал времени между измерениями. Полученные величины
, для чего используются хранящиеся в ЗУ 12 значение первого измерения u1 и определенная в вычислителе 11 величина Tn - текущий интервал времени между измерениями. Полученные величины  ,
,  являются начальными значениями для инициации процесса фильтрации и поступают с третьего и четвертого выходов блока определения α и β 10, соответственно, на третий вход сумматора 8 и третий вход сумматора 4. Значение
являются начальными значениями для инициации процесса фильтрации и поступают с третьего и четвертого выходов блока определения α и β 10, соответственно, на третий вход сумматора 8 и третий вход сумматора 4. Значение  передается на третий выход устройства фильтрации, на первый выход устройства фильтрации передается значение скорости изменения параметра ТО .
передается на третий выход устройства фильтрации, на первый выход устройства фильтрации передается значение скорости изменения параметра ТО .
Начиная с третьего измерения устройство фильтрации параметров ТО работает следующим образом. В вычислителе 11 начальные значения обнуляются ( ,
,  ), и во всех последующих измерениях, начиная с третьего измерения, на третьи входы сумматоров 4 и 8 подаются нулевые значения. В сумматоре 7 определяется экстраполированное значение параметра ТО
), и во всех последующих измерениях, начиная с третьего измерения, на третьи входы сумматоров 4 и 8 подаются нулевые значения. В сумматоре 7 определяется экстраполированное значение параметра ТО  путем суммирования предыдущего сглаженного значения параметра ТО
путем суммирования предыдущего сглаженного значения параметра ТО  поступающего с выхода ЗУ 9 на второй вход сумматора 7, и величины
поступающего с выхода ЗУ 9 на второй вход сумматора 7, и величины  , поступающей с выхода умножителя 6 на первый вход сумматора 7.
, поступающей с выхода умножителя 6 на первый вход сумматора 7.
В сумматоре 1 определяется сигнал ошибки  путем суммирования текущего измеренного значения параметра ТО un, поступающего на первый вход сумматора 1, и экстраполированного значения параметра ТО
путем суммирования текущего измеренного значения параметра ТО un, поступающего на первый вход сумматора 1, и экстраполированного значения параметра ТО  , поступающего с выхода сумматора 7 на инверсный второй вход сумматора 1.
, поступающего с выхода сумматора 7 на инверсный второй вход сумматора 1.
В это же время в блоке определения α и β 10, в соответствии с формулами (8, 9) определяются коэффициенты сглаживания α и β. Для этого на первый вход блока определения α и β 10 поступает текущее измеренное значение параметра ТО un, на второй вход поступает текущее время измерения tn, а на входы 3, 4, 5, 6, 7 подаются, соответственно, с выхода сумматора 8 текущее сглаженное значение параметра ТО  , с выхода сумматора 7 экстраполированное значение параметра ТО , с выхода ЗУ 5 - предыдущее сглаженное значение скорости изменения параметра ТО
, с выхода сумматора 7 экстраполированное значение параметра ТО , с выхода ЗУ 5 - предыдущее сглаженное значение скорости изменения параметра ТО  , с выхода сумматора 4 - текущее сглаженное значение скорости изменения параметра ТО
, с выхода сумматора 4 - текущее сглаженное значение скорости изменения параметра ТО  , с выхода сумматора 1 - сигнал ошибки
, с выхода сумматора 1 - сигнал ошибки  . Входы 1-7 блока определения α и β 10 являются одновременно входами 1, 10-15 вычислителя 11. В каждом измерении с выходов 1, 2, 4, 5, 6, 7 ЗУ 12 на входы 2, 3, 5, 6, 7, 8 вычислителя 11, соответственно, подаются величины αmin, βmin, tn-1, δu, αmax, βmax. В соответствии с описанным выше способом в вычислителе 11 определяются:
. Входы 1-7 блока определения α и β 10 являются одновременно входами 1, 10-15 вычислителя 11. В каждом измерении с выходов 1, 2, 4, 5, 6, 7 ЗУ 12 на входы 2, 3, 5, 6, 7, 8 вычислителя 11, соответственно, подаются величины αmin, βmin, tn-1, δu, αmax, βmax. В соответствии с описанным выше способом в вычислителе 11 определяются:
- текущий интервал времени между измерениями Tn=tn-tn-1;
- абсолютная величина сигнала ошибки  ;
;
- абсолютная величина отклонения текущего сглаженного значения параметра ТО от экстраполированного значения параметра ТО  ;
;
- абсолютная величина отклонения текущего сглаженного значения скорости изменения параметра ТО  от предыдущего сглаженного значения скорости изменения параметра ТО
от предыдущего сглаженного значения скорости изменения параметра ТО 
По полученным абсолютным отклонениям и константам, поступающим на вычислитель 11 с ЗУ 12, в соответствии с формулами (8, 9), определяются коэффициенты сглаживания α и β, которые передаются в ЗУ 12 для использования в следующем (n+1)-ом измерении. При этом с девятого и восьмого выходов ЗУ 12 снимаются ранее запомненные значения коэффициентов сглаживания α и β, соответственно, для использования в фильтрации текущего n-го измерения. Величина коэффициента сглаживания α с первого выхода блока определения α и β 10 подается на второй вход умножителя 2 устройства фильтрации параметров ТО. Величина коэффициента сглаживания β подается на девятый вход вычислителя 11, где производится вычисление величины β/Tn, которая поступает со второго выхода блока определения α и β 10 на второй вход умножителя 3 устройства фильтрации параметров ТО.
С выхода сумматора 1 сигнал ошибки подается на седьмой вход блока определения α и β 10 и на первые входы умножителей 2 и 3, на вторые входы которых с первого и второго выходов блока определения α и β 10 поступают соответственно величины α и β/Tn.
Взвешенный коэффициентом α сигнал ошибки с выхода умножителя 2 поступает на второй вход сумматора 8, на первый вход которого с выхода сумматора 7 поступает экстраполированное значение параметра ТО . В результате суммирования с выхода сумматора 8 снимается текущее сглаженное значение параметра ТО  .
.
С выхода умножителя 3 сигнал ошибки, взвешенный величиной β/Tn, подается на первый вход сумматора 4, на второй вход которого с выхода ЗУ 5 поступает величина  . В результате на выходе сумматора 4 снимается текущее сглаженное значение скорости изменения параметра ТО
. В результате на выходе сумматора 4 снимается текущее сглаженное значение скорости изменения параметра ТО  .
.
Текущие сглаженные значения  , , и подаются на первый, второй и третий выходы устройства фильтрации параметров ТО соответственно.
, , и подаются на первый, второй и третий выходы устройства фильтрации параметров ТО соответственно.
В результате работы устройства фильтрации параметров ТО блок определения α и β 10 автоматически подстраивает коэффициенты сглаживания α и β к текущим условиям сопровождения объекта (линейная траектория, маневр и т.д.).
Таким образом, технический результат заявленных способа и устройства достигнут, поставленная задача решена. Как следует из фиг.5 и фиг.6, при фильтрации параметра траектории (в качестве примера в данном случае выступает азимут) объекта, совершающего маневр типа «змейка» с перегрузкой 3g, с использованием известных наиболее близких к заявленному способов фильтрации параметров траектории объекта ошибки фильтрации оказываются большими. Из фиг.7 видно, что ошибки фильтрации параметров траектории объекта по заявленному способу, при тех же самых условиях, значительно меньше. Аналогичные результаты получаются и при более высоких перегрузках до (7-10)g. Применение предлагаемых способа и устройства позволяет уменьшить ошибки фильтрации путем адаптации коэффициентов сглаживания фильтра к текущим условиям сопровождения объекта. Объекты могут сопровождаться в условиях, когда параметры ТО (координаты) изменяются в общем случае по неизвестным, нелинейным, законам (например, при маневре объекта), а их измерения проводятся с постоянной или переменной дискретностью и разными неизвестными ошибками.
Кроме того, становится возможным решение актуальной задачи фильтрации координат объектов в исходной измерительной (полярной) системе координат (СК) радиолокационной станции (РЛС). В этой СК РЛС непосредственно измеряет дальность, угол места и азимут. Однако, в общем случае, даже при движении объекта по прямой линии, координаты в полярной СК изменяются по нелинейным законам. Поэтому для исключения нелинейности при фильтрации координат их обычно преобразуют из полярной СК в прямоугольную СК, и уже в прямоугольной СК производят фильтрацию координат объектов. При этом в процессе функционирования РЛС приходится постоянно совершать пересчет координат из прямоугольной СК в измерительную (полярную) СК и обратно. В результате появляются дополнительные ошибки фильтрации, связанные с преобразованием координат. При использовании предлагаемого способа фильтрации параметров траектории объекта становится возможной фильтрация координат объектов в исходной измерительной (полярной) СК, что значительно упрощает процесс фильтрации, снижает ошибки фильтрации координат и исключает ошибки, возникающие при преобразовании координат из полярной СК в прямоугольную СК и обратно.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФИЛЬТРАЦИИ ПАРАМЕТРОВ ТРАЕКТОРИИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2408027C2 |
| СПОСОБ ФИЛЬТРАЦИИ ПАРАМЕТРОВ ТРАЕКТОРИИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2358286C1 |
| Способ определения модуля скорости баллистического объекта с использованием выборки произведений дальности на радиальную скорость и устройство для его реализации | 2015 |
|
RU2634479C2 |
| Способ радиолокационного определения путевой скорости неманеврирующей аэродинамической цели по выборке произведений дальности на радиальную скорость и устройство для его реализации | 2015 |
|
RU2644588C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ВЕРТИКАЛЬНОЙ СКОРОСТИ БАЛЛИСТИЧЕСКОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2646854C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МОДУЛЯ СКОРОСТИ БАЛЛИСТИЧЕСКОГО ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ ВЫБОРКИ КВАДРАТОВ ДАЛЬНОСТИ | 2015 |
|
RU2658317C1 |
| ТРЕХМЕРНЫЙ АДАПТИВНЫЙ α-β ФИЛЬТР | 2016 |
|
RU2631766C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МОМЕНТА ОКОНЧАНИЯ АКТИВНОГО УЧАСТКА БАЛЛИСТИЧЕСКОЙ ТРАЕКТОРИИ ПО ВЫБОРКАМ КВАДРАТОВ ДАЛЬНОСТИ | 2020 |
|
RU2752265C1 |
| СПОСОБ И УСТРОЙСТВО СОПРОВОЖДЕНИЯ МАНЕВРИРУЮЩИХ ЦЕЛЕЙ В ОБЗОРНОЙ ДОПЛЕРОВСКОЙ РЛС | 2023 |
|
RU2815305C1 |
| СПОСОБ АДАПТИВНОГО СОПРОВОЖДЕНИЯ РАДИОЛОКАЦИОННЫХ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2679598C1 |

Изобретение относится к области радиолокации, а также автоматики и может быть использовано для фильтрации параметров траектории (координат) сопровождаемых радиолокационных объектов или для фильтрации каких-либо параметров других случайных процессов. Технический результат - уменьшение ошибки фильтрации путем адаптации коэффициентов сглаживания фильтра к текущим условиям сопровождения объекта. Это позволяет сопровождать объекты в условиях, когда координаты объектов изменяются в общем случае по неизвестным, нелинейным законам (например, при маневре объекта), а их измерения проводятся с постоянной или переменной дискретностью и разными неизвестными ошибками. Использование предлагаемых способа и устройства дает возможность проводить фильтрацию координат объектов в исходной измерительной (полярной) системе координат, что значительно упрощает процесс фильтрации, снижает ошибки фильтрации координат и исключает ошибки, возникающие при преобразовании координат из полярной системы в прямоугольную. 2 н.п. ф-лы, 7 ил.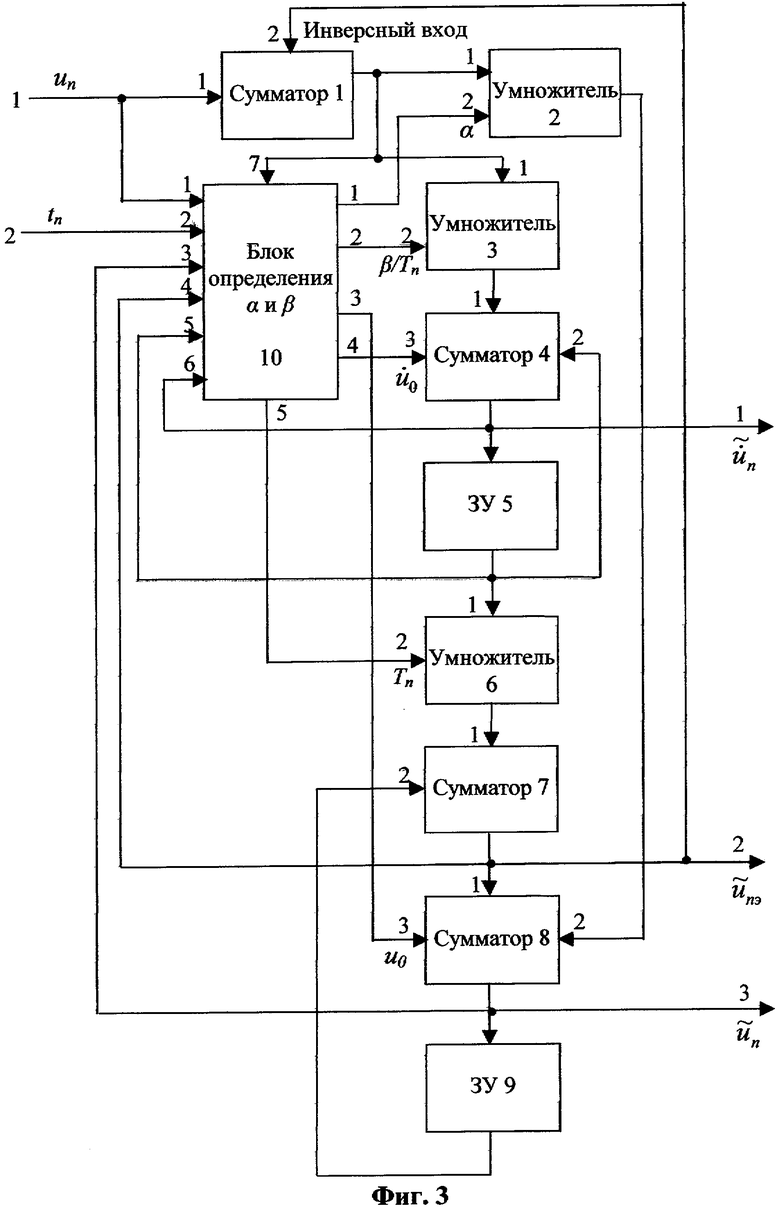

если α>αmax, то α=αmax,
если β>βmax, то β=βmax,
где n=3, 4, 5, ...;
 - абсолютная величина отклонения текущего сглаженного значения параметра ТО
- абсолютная величина отклонения текущего сглаженного значения параметра ТО  от экстраполированного n-го значения параметра ТО
от экстраполированного n-го значения параметра ТО 
 - абсолютная величина отклонения текущего сглаженного значения скорости изменения параметра ТО
- абсолютная величина отклонения текущего сглаженного значения скорости изменения параметра ТО  от предыдущего сглаженного значения скорости изменения параметра ТО
от предыдущего сглаженного значения скорости изменения параметра ТО 

 - абсолютная величина сигнала ошибки;
- абсолютная величина сигнала ошибки;

 - сигнал ошибки;
- сигнал ошибки;
α0, β0 - константы, задающие минимально допустимые значения коэффициентов сглаживания α и β;
αmax, βmax - константы, задающие максимально допустимые значения коэффициентов α и β;
δu - константа, выбираемая из условия δu≪,
при этом полученные коэффициенты α и β запоминают и используют для фильтрации параметра ТО при следующем n+1-ом измерении с соответствующим значением интервала времени Tn+1=tn+1-tn
или в каждом текущем n-ом измерении определяют коэффициенты сглаживания по формулам
где n=3, 4, 5, ...;

α0, β0 - константы, задающие минимально допустимые значения коэффициентов сглаживания α и β;
kα, kβ - заданные коэффициенты, определяемые из условий требуемой скорости изменения коэффициентов сглаживания, соответственно α и β, в зависимости от абсолютной величины сигнала ошибки 
θu - константа, определяющая величину разрешающей способности по измеряемому параметру ТО,
при этом полученные коэффициенты α и β используют для фильтрации параметра ТО в текущем n-ом измерении с текущим значением интервала времени Tn=tn-tn-1.
| КУЗЬМИН С.З | |||
| Основы теории цифровой обработки радиолокационной информации | |||
| - М.: Советское радио, 1974, с.383 | |||
| SU 1702782, 20.09.1996 | |||
| СПОСОБ ПИЛОТИРОВАНИЯ ЛА ПО ЗАДАВАЕМОЙ ТРАЕКТОРИИ С ЗАДАВАЕМОЙ СКОРОСТЬЮ | 1997 |
|
RU2129699C1 |
| СПОСОБ ОЦЕНКИ ХАРАКТЕРИСТИК РАДИОЛОКАЦИОННОЙ СТАНЦИИ ПРИ ДЕЙСТВИИ АКТИВНЫХ ШУМОВЫХ ПОМЕХ | 2000 |
|
RU2193782C2 |
| СПОСОБ ОЦЕНИВАНИЯ ПАРАМЕТРОВ ТРАЕКТОРИИ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ В УГЛОМЕРНОЙ ДВУХПОЗИЦИОННОЙ ПАССИВНОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2004 |
|
RU2263927C2 |
| WO 2004005961, 15.01.2004 | |||
| US 6211812 A, 03.04.2001. | |||

