Область техники, к которой относится изобретение
Настоящее изобретение относится к сельскохозяйственной рабочей машине, в частности уборочной машине, в соответствии с ограничительной частью пункта 1 формулы изобретения, а также к способу эксплуатации сельскохозяйственной рабочей машины соответствии с ограничительной частью пункта 19 формулы изобретения.
Уровень техники
Сельскохозяйственные рабочие машины, к которым относятся, в частности, зерноуборочные и кормоуборочные комбайны, часто содержат уборочное устройство для убираемого материала, с помощью которого убираемый материал может быть отделен от полевой культуры и захвачен для последующей обработки. Уборочное устройство для убираемого материала в свою очередь часто содержит множество отдельных компонентов, которые могут эксплуатироваться с различными параметрами. Примерами таких компонентов у зерноуборочного комбайна являются устройство для захвата убираемого материала в виде мотовила, устройство для срезания убираемого материала в виде платформы жатки с ножевым брусом, устройство для транспортировки убираемого материала в виде транспортного шнека, в частности, поперечного транспортного шнека, и устройство для втягивания убираемого материала в виде наклонного транспортера. В случае зерноуборочного комбайна могут быть установлены, например, положение (высота срезания, позиция) и число оборотов мотовила, а также скорость поперечного транспортного шнека или наклонного транспортера. Таким образом можно влиять на поток убираемого материала внутри уборочного устройства для убираемого материала. Помимо этого, на поток убираемого материала внутри уборочного устройства для убираемого материала влияет скорость движения уборочной машины, так как таким образом оказывается влияние на количество захваченной убираемого материала, обрабатываемой уборочным устройством для убираемого материала.
Несмотря на наличие автоматических настроек уборочного устройства для убираемого материала, водитель сельскохозяйственной рабочей машины должен постоянно визуально отслеживать поток убираемого материала внутри уборочного устройства для убираемого материала. Например, он должен следить за тем, чтобы скорость потока убираемого материала внутри уборочного устройства для убираемого материала была как можно более равномерной, так как при неравномерном потоке убираемого материала может возникнуть необходимость снижения скорости транспортного средства и, тем самым, снижения захвата убираемого материала, чтобы не допустить затора материала. При возникновении затора материала, то есть, уменьшения скорости потока убираемого материала вплоть до остановки, необходимо прерывать процесс уборки и производить затратное устранение затора материала. Требуемое на это время значительно снижает экономическую эффективность уборки.
Сложность заключается в как можно более раннем распознавании затора материала. Если затор материала ясно виден визуально, зачастую уже слишком поздно корректировать работу уборочного устройства для убираемого материала. По этой причине в патентном документе ЕР 3300019 А1 раскрыто использование регулирующего устройства с сенсорным блоком и блоком обработки изображений, посредством которого методом оптического потока осуществляется отслеживание потока убираемого материала. Сенсорное устройство содержит, например, две камеры, направленные от кабины водителя к уборочному устройству для убираемого материала и фиксирующие там отдельные участки компонентов и поток убираемого материала. Сенсорное устройство создает последовательность изображений, то есть, множество следующих друг за другом изображений. Каждые два следующих друг за другом изображения в соответствии с уровнем техники группируют в пару изображений, причем распознают сдвиги положения шаблонов интенсивности (пикселей или групп пикселей) между изображениями соответствующей пары изображений. При этом шаблоны интенсивности необязательно образуются объектами или конкретными признаками убираемого материала, а в целом образуются пикселями или группами пикселей в изображении, положение которых меняется от одного изображения к следующему. На основе этих сдвигов положений шаблонов интенсивности при известности временного промежутка между изображениями пары изображений можно сделать вывод о скорости перемещения шаблонов интенсивности. Скорости нескольких шаблонов интенсивности можно для каждой пары изображений и каждой состоящей из нескольких пар последовательности изображений объединить в поля характеристик скорости, которые могут быть представлены визуально. Такое поле характеристик также называют оптическим потоком. В том, что касается метода оптического потока и его применения для отслеживания потока убираемого материала внутри уборочного устройства для убираемого материала, заявитель ссылается на патентный документ ЕР 3300019 А1, делая его содержание в этой связи объектом настоящей заявки.
В случае указанного решения согласно уровню техники, в котором для отслеживания уборочного устройства для убираемого материала и предотвращения возникновения затора материала используется метод оптического потока, то есть, полей характеристик скорости, решающее значение имеет как можно более точная обработка изображений для как можно более точного распознавания изменений шаблонов интенсивности и соответственно раннего реагирования на начинающийся затор материала.
Раскрытие сущности изобретения
Задачей изобретения является создание и усовершенствование сельскохозяйственной рабочей машины, позволяющей улучшить отслеживание уборочного устройства для убираемого материала с точки зрения точности, надежности и своевременности.
Вышеуказанная проблема решена сельскохозяйственной рабочей машиной в соответствии с ограничительной частью пункта 1 формулы изобретения с признаками отличительной части пункта 1 формулы изобретения.
Существенной является основополагающая идея о том, чтобы дополнить данные, предоставляемые полем характеристик скорости, дополнительными данными, которые могут быть получены посредством метода оптического потока. Таким образом, уже описанный анализ пар изображений создаваемой сенсорным блоком последовательности изображений предоставляет данные не только о скоростях шаблонов интенсивности, то есть, пикселей и/или групп пикселей, внутри изображений, но и о направлении движения шаблонов интенсивности. Так на основе пикселей по паре изображений может быть определено направление движения соответствующего шаблона интенсивности. По нескольким парам изображений, на которых показан один и тот же фрагмент изображения и, тем самым, те же шаблоны интенсивности, и которые, в частности, следуют непосредственно друг за другом, могут быть соответственно установлены изменения направления. Изменения направления отдельных шаблонов интенсивности могут, как и их скорости, быть объединены в поле характеристик, так называемое поле характеристик изменения направления. Поле характеристик изменения направления показывает изменения направления шаблонов интенсивности от одной пары изображений к следующей, в частности, для всей последовательности изображений.
Данные из соответствующего поля характеристик изменения направления могут быть привлечены для проверки данных из соответствующего, то есть, совпадающего по времени поля характеристик скорости на достоверность. Так, при низких скоростях потока материала, указывающих на имеющий место или по меньшей мере начинающийся затор материала, локально возникают относительно сильные изменения направления, так как частицы убираемого материала, а тем самым и шаблоны интенсивности усиленно движутся поперек основного направления потока. Эти поперечные движения распознаются как отклонения от основного направления потока убираемого материала, причем степень этих отклонений возрастает с уменьшением скорости в основном направлении потока. При этом говорят также о рассеивании углов, определяющих изменения направления. Таким образом, возможно на основе соответствующего поля характеристик изменения направления еще раз проверить области в поле характеристик скорости, указывающие на низкие скорости. Таким образом можно минимизировать ошибки при определении действительного прохождения потока убираемого материала.
Согласно изобретению предусмотрено, что блок обработки изображений выполнен с возможностью составления в дополнение к полю характеристик скорости поля характеристик изменения направления на основе изображений, полученных сенсорным блоком, и что регулирующее устройство привлекает оба поля характеристик вместе либо по отдельности для регулирования процессов в сельскохозяйственной рабочей машине и/или в уборочном устройстве для убираемого материала. За счет того, что помимо поля характеристик скорости учитывается и поле характеристик изменения направления, может быть повышена точность, а тем самым и надежность и своевременность отслеживания потока убираемого материала в уборочном устройстве для убираемого материала.
Согласно варианту осуществления по пункту 2, поле характеристик скорости может включать в себя скорости потока материала и/или скорости поверхностных участков машинных деталей. В случае машинных деталей речь идет о компонентах уборочного устройства для убираемого материала. Так как они тоже двигаются и могут быть оптически зарегистрированы сенсорным блоком, в данном случае также могут быть распознаны сдвиги положений, основанные на пикселях, а из них выведены соответствующие скорости. В качестве альтернативы или дополнительно, поле характеристик изменения направления может включать в себя изменения направления в потоке убираемого материала и/или изменения направления поверхностных участков машинных деталей. При этом достигается особое преимущество. Так как машинные детали при определенных обстоятельствах распознаются как области с низкой скоростью, посредством привлечения поля характеристик изменения направления можно определить, проходит ли через распознанную область с низкой скоростью поток убираемого материала, что указывало бы на затор, или является ли область свободной от убираемого материала, в случае чего низкая скорость вызвана исключительно низкой скоростью соответствующего участка поверхности машинной детали. Таким образом можно избежать ошибочных интерпретаций, при которых области с низкой скоростью ошибочно интерпретируются как затор материала, в то время как в действительности он там отсутствует и, в частности, вообще отсутствует убираемый материал.
Пункты 3-8 формулы изобретения характеризуют предпочтительные возможности составления обоих полей характеристик, то есть, поля характеристик скорости и поля характеристик изменения направления. При этом скорости, определенные блоком обработки изображений, с одной стороны, и изменения направления или углы, определенные блоком обработки изображений, с другой стороны, могут также быть графически показаны посредством блока вывода данных (пункты 6 и 8). Особенно предпочтительно, если при этом различные скорости и/или различные изменения направления показаны различными цветами.
Согласно особенно предпочтительному варианту осуществления по п. 9, графическое отображение скоростей и/или изменений направления может также осуществляться в устройстве индикации блока вывода данных, за счет чего водитель может воспринимать его визуально.
Пункты 10 и 11 характеризуют предпочтительные варианты осуществления регулирующего устройства, которые могут сравнивать вычисленные скорости или изменения направления с предварительно заданными граничными значениями. В частности, могут быть заданы верхнее граничное значение и нижнее граничное значение, причем все скорости или изменения направления выше верхнего граничного значения определяют оптимальный поток материала, и/или скорости или изменения направления между граничными значениями интерпретируют как поток материала, при котором начинается затор материала, и/или скорости или изменения направления ниже нижнего граничного значения интерпретируют как затор материала. При помощи такого деления, в частности, при использовании области выше верхнего граничного значения, области между верхним и нижним граничными значениями и области ниже нижнего граничного значения, возможно особенно раннее реагирование на изменения в потоке материала. В частности, можно получить прогностическую информацию, которая уже в преддверии начинающегося затора материала вызывает принятие мер регулирования, которые могут воспрепятствовать началу затора материала и, тем более, действительному затору материала.
В пункте 12 охарактеризованы предпочтительные области, которые могут быть зарегистрированы сенсорным блоком. Так, может быть зарегистрирована (неубранная) полевая культура перед уборочным устройством для убираемого материала, а также (убранная) полевая культура позади уборочного устройства для убираемого материала. Кроме того, могут быть зарегистрированы компоненты уборочного устройства для убираемого материала, такие как устройство для захвата убираемого материала, устройство для срезания убираемого материала, устройство для транспортировки убираемого материала и устройство для втягивания убираемого материала. Помимо этого, может быть зарегистрирован поток убираемого материала в различных местах, например, внутри устройства для захвата убираемого материала и/или над устройством для срезания убираемого материала.
Согласно варианту осуществления по пункту 13, блок обработки изображений выполнен с возможностью распознавания в изображениях областей изображений, в частности, соответствующих названным выше областям. Области изображений могут затем быть проанализированы по отдельности, а также отображены графически. Это позволяет вычислить скорости и/или изменения направления для соответствующей области изображения и составить поле характеристик для соответствующей области изображения (пункт 14).
Согласно особенно предпочтительному варианту осуществления по пункту 15, область изображения с потоком убираемого материала над устройством для захвата убираемого материала и/или область изображения с потоком убираемого материала вертикально над устройством для срезания убираемого материала могут быть поделены на подобласти в направлении, поперечном направлению движения, причем для каждой подобласти могут быть указаны средние значения скоростей потока материала. В случае этих средних значений речь идет предпочтительно об абсолютном значении или об отношении к опорному значению. Таким образом может быть определена однородность потока материала, в частности, в виде процентных значений. Эти значения предпочтительно могут быть также показаны графически (пункт 16). Здесь также для различных значений или областей значений могут применяться различные цвета и т.п. Принципиально возможно и отображение в виде числовых значений.
Пункт 17 характеризует различные меры регулирования, которые могут быть осуществлены с привлечением полей характеристик. Эти меры регулирования могут быть реализованы заранее, то есть, в преддверии начинающегося затора материала.
Пункт 18 характеризует примеры устройства для захвата убираемого материала, устройства для срезания убираемого материала, устройства для транспортировки убираемого материала и устройство для втягивания убираемого материала.
Согласно техническому решению по пункту 19, имеющему самостоятельное значение, заявлен способ эксплуатации сельскохозяйственной рабочей машины, в частности, сельскохозяйственной рабочей машины предложенного типа, в котором помимо поля характеристик скорости составляют поле характеристик изменения направления и привлекают его для регулирования посредством регулирующего устройства процессов, протекающих в сельскохозяйственной рабочей машине и/или в уборочном устройстве для убираемого материала. Применительно к способу делается ссылка на сказанное выше о предложенной сельскохозяйственной рабочей машине.
Краткое описание чертежей
Предложенное изобретение детально рассмотрено ниже на основании одного предпочтительного варианта осуществления, изображенного на фигурах.
Показаны:
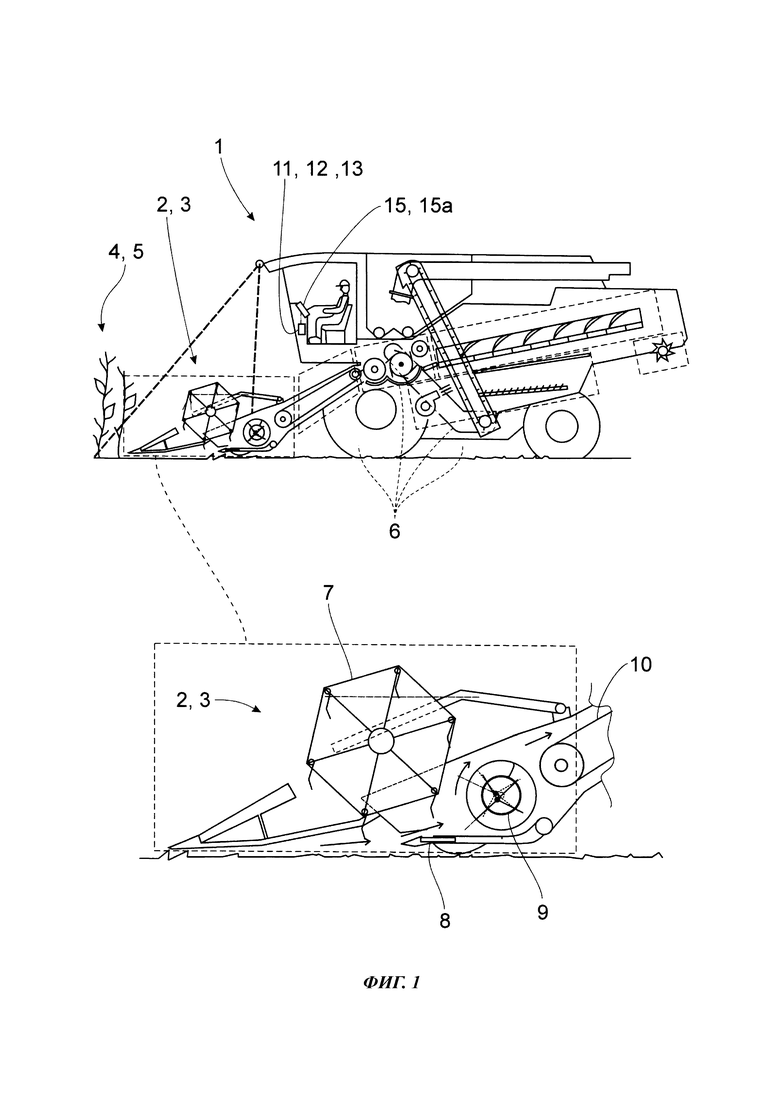
фиг. 1 - схематический вид сбоку предложенной сельскохозяйственной рабочей машины, а также укрупненный вид уборочного устройства для убираемого материала сельскохозяйственной рабочей машины,
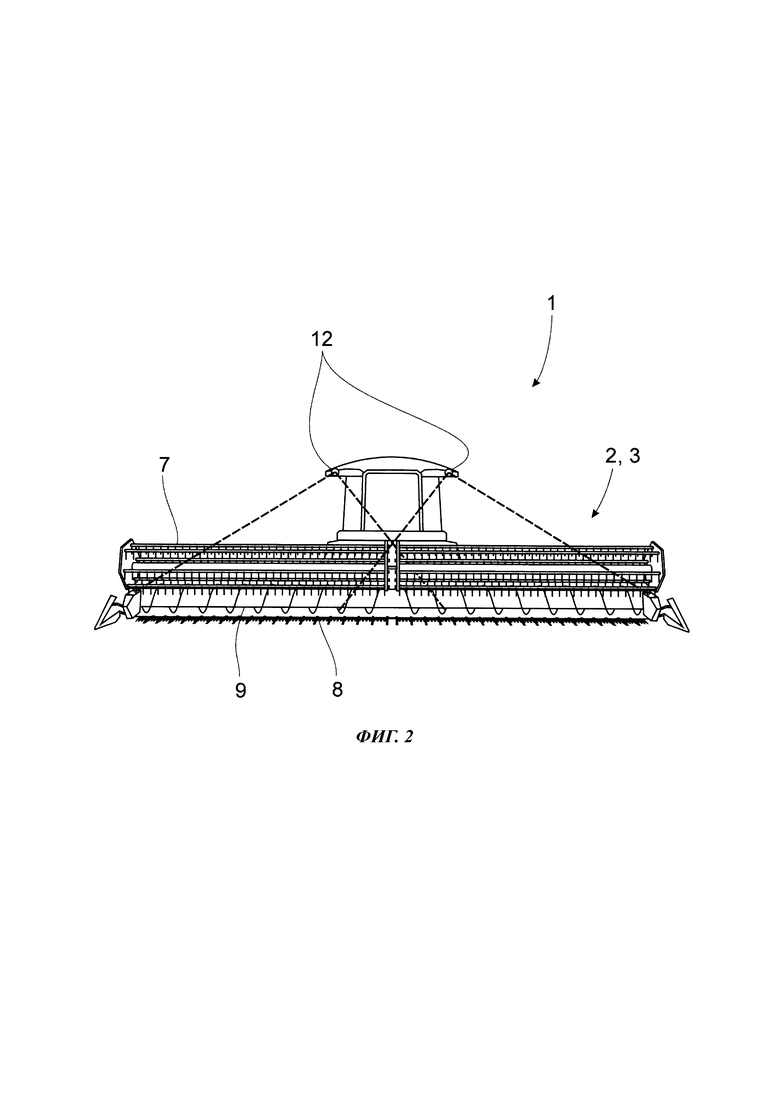
фиг. 2 - схематический вид спереди предложенной сельскохозяйственной рабочей машины с уборочным устройством для убираемого материала,
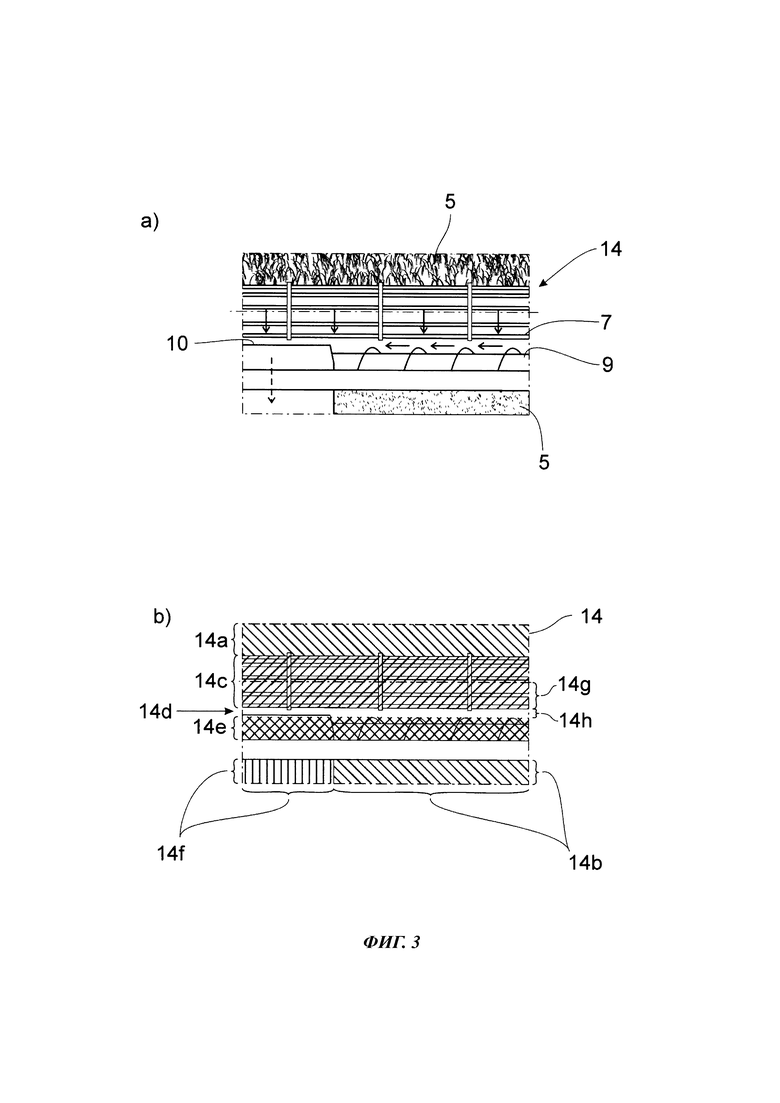
фиг. 3 - схематический вид а) созданного сенсорным блоком предложенной сельскохозяйственной рабочей машины изображения с уборочным устройством для убираемого материала и Ь) изображения после обработки блоком обработки изображений предложенной сельскохозяйственной рабочей машины и
фиг. 4 - схематическое изображение устройства индикации блока вывода данных предложенной сельскохозяйственной рабочей машины.
Осуществление изобретения
Предложенная сельскохозяйственная рабочая машина 1, в данном примере являющаяся зерноуборочным комбайном, содержит уборочное устройство 2 для убираемого материала, в данном случае образованное жаткой 3 и расположенное на сельскохозяйственной рабочей машине 1 спереди по направлению движения. Уборочное устройство 2 для убираемого материала или жатка 3 служат для отделения и захвата убираемого материала 4 из полевой культуры 5, причем убираемый материал подается для дальнейшей обработки посредством нескольких последующих рабочих органов 6 сельскохозяйственной рабочей машины 1.
В качестве компонентов уборочное устройство 2 для убираемого материала здесь и предпочтительно содержит устройство 7 для захвата убираемого материала в виде мотовила, устройство 8 для срезания убираемого материала в виде платформы жатки с ножевым брусом, следующее за ним с точки зрения технологии процесса устройство 9 для транспортировки убираемого материала в виде транспортного шнека, в частности, поперечного транспортного шнека, и следующее за ним с точки зрения технологии процесса устройство 10 для втягивания убираемого материала в виде наклонного транспортера.
В предложенной сельскохозяйственной рабочей машине 1 убираемый материал 4 в виде потока убираемого материала (показан стрелками на фиг. 1 и 3а) направляется через уборочное устройство 2 для убираемого материала. Здесь и предпочтительно убираемый материал 4 захватывается и удерживается устройством 7 для захвата убираемого материала или мотовилом, в то время как она отделяется от устройства 8 для срезания убираемого материала. Затем отделенный убираемый материал 4 перемещается к устройству 9 для транспортировки убираемого материала, здесь и предпочтительно проходящему в поперечном направлении, а от него - в поперечном направлении, то есть, поперек направления движения, транспортируется к центру транспортного средства, где она втягивается устройством 10 для втягивания убираемого материала и транспортируется дальше внутрь сельскохозяйственной рабочей машины 1.
Кроме этого сельскохозяйственная рабочая машина 1 содержит регулирующее устройство 11, которое здесь и предпочтительно служит для того, чтобы, помимо указанных компонентов 7-10 уборочного устройства 2 для убираемого материала регулировать также другие рабочие органы 6 сельскохозяйственной рабочей машины 1. Регулирование может включать в себя регулирование скорости или числа оборотов и/или перестановки высоты и/или перестановки положения. Также посредством регулирующего устройства 11 здесь и предпочтительно регулируют скорость движения сельскохозяйственной рабочей машины 1. Регулирующее устройство 11 здесь и предпочтительно содержит сенсорный блок 12 в виде двух камер, причем сенсорный блок 12 расположен в передней области сельскохозяйственной рабочей машины 1 и служит для оптической регистрации потока убираемого материала. Область оптической регистрации символически показана на фиг. 1 и 2 штриховыми линиями.
Регулирующее устройство 11 далее содержит блок 13 обработки изображений для обработки изображений 14, одно из которых в качестве примера показано на фиг. 3а). Изображения 14 создаются сенсорным блоком 12 на основе оптически зарегистрированного потока убираемого материала.
Помимо этого регулирующее устройство 11 содержит блок 15 вывода данных, который здесь и предпочтительно содержит устройство 15а индикации и служит для вывода изображений 14, обработанных блоком 13 обработки изображений.
Блок 13 обработки изображений предложенной сельскохозяйственной рабочей машины 1 на основе изображений 14, созданных сенсорным блоком 12, составляет поле 16 характеристик скорости, также называемое оптическим потоком. Оптический поток - это заданное частотой изображения попиксельное движение на поверхности изображения, также называемой полем потока. Частота изображения при этом, в свою очередь, определяется положением пикселя и моментом времени. Движение - это векторное поле на изображении 14, образованное наложением двух изображений 14 пары изображений, описывающее зависимый от времени сдвиг пикселя или группы пикселей, далее называемых также шаблонами интенсивности, от одного изображения пары изображений к следующему. При этом составленное из двух одиночных изображений 14 изображение может перед этим быть обработано блоком 13 обработки изображений, как это подробно описано, например, в ЕР 3300019 А1. Исключительно в качестве примера здесь можно назвать метод Лукаса-Канаде, при котором уменьшается разрешение изображения. Далее может быть произведено подавление шума, изменение контраста, изменение яркости и т.п. Полученное в результате изображение привлекается для составления поля 16 характеристик скорости.
Существенным является то, что блок 13 обработки изображений предложенной сельскохозяйственной рабочей машины 1 выполнен с возможностью составления на основе изображений 14, созданных сенсорным блоком 12, в дополнение к полю 16 характеристик скорости поля 17 характеристик изменения направления. Согласно изобретению, регулирующее устройство 11 привлекает оба поля 16, 17 характеристик вместе или по отдельности для регулирования процессов в сельскохозяйственной рабочей машине 1, например, например, для регулирования рабочих органов 6 и/или процессов в уборочном устройстве 2 для убираемого материала, например, вышеназванных компонентов 7-10. При этом блок 13 обработки изображений составляет поля 16, 17 характеристик, которые регулирующее устройство 11, в частности, вычислительное устройство (не показано) регулирующего устройства 11 опять же привлекает для указанных мер регулирования.
Поле 16 характеристик скорости, включает в себя скорости потока материала, в частности, частиц убираемого материала, а также скорости поверхностных участков машинных деталей компонентов уборочного устройства 2 для убираемого материала, а именно, в виде областей v1-v4 скоростей, в которых несколько скоростей объединены в одну область. Поле 17 характеристик изменения направления включает в себя изменения направления, в частности, частиц убираемого материала, в потоке убираемого материала и/или изменения направления поверхностных участков машинных деталей компонентов 7-10 уборочного устройства 2 для убираемого материала, здесь в виде областей Δ1-Δ5 изменения направления, в которых несколько изменений направления объединены в одну область.
Для составления полей 16, 17 характеристик блок 13 обработки изображений группирует два, в частности, два непосредственно следующих друг за другом, изображения 14 созданной сенсорным блоком 12 последовательности изображений в пару изображений. При этом блок 13 обработки изображений регистрирует временной промежуток между изображениями 14 соответствующей пары изображений. В качестве альтернативы или дополнительно, временной промежуток может быть задан блоком 13 обработки изображений. При этом каждое изображение 14 соответствующей пары изображений содержит шаблон интенсивности, то есть, пиксель или группу пикселей. Блок 13 обработки изображений определяет сдвиги положения шаблонов интенсивности между изображениями 14 соответствующей пары изображений, включающие в себя величины сдвига и направления сдвига. Здесь и предпочтительно величины сдвига и направления сдвига для каждой пары изображений в виде векторов объединяются в векторные поля соответствующей пары изображений.
На основе величин сдвига шаблонов интенсивности между изображениями 14 соответствующей пары изображений и временного промежутка между изображениями 14 соответствующей пары изображений посредством блока 13 обработки изображений вычисляют скорости. Как было указано выше, скорости являются скоростями потока материала и/или скоростями поверхностных участков компонентов 7-10 уборочного устройства 2 для убираемого материала. Здесь и предпочтительно соответствующие скорости, здесь в виде областей v1-v4 скоростей, в которых несколько скоростей объединены в одну область, графически отображаются блоком 15 вывода данных, в частности, устройством 15а индикации, причем здесь и предпочтительно различные скорости или области v1-v4 скоростей отображаются различными цветами. Вместо различных цветов могут также использоваться различные градации серого и/или текстуры.
Блок 13 обработки изображений здесь и предпочтительно сравнивает направления сдвига шаблонов интенсивности первой пары изображений с направлениями сдвига соответствующих шаблонов интенсивности второй пары изображений той же последовательности изображений, в частности, пары изображений, следующей непосредственно за ней. Под соответствующими шаблонами интенсивности понимается, что во второй паре изображений привлекается тот же пиксель или та же группа пикселей, что и в первой паре. На основе сравнения направлений сдвига между двумя парами изображений вычисляются изменения направления. При этом речь здесь и предпочтительно идет об изменениях направления в потоке убираемого материала и/или изменениях направления поверхностных участков машинных деталей. Эти изменения направления также графически изображаются блоком 15 вывода данных или устройством 15а индикации, здесь в виде областей Δ1-Δ5 изменений направления, в которых несколько изменений направления объединены в одну область. Различные изменения направления или области Δ1-Δ5 изменений направления здесь также изображаются различными цветами, причем в качестве альтернативы также могут использоваться различные градации серого и/или текстуры.
Пример отображения различных скоростей или областей v1-v4 скоростей при помощи различных цветов, градаций серого и/или текстур показан на фиг. 4 слева в середине. В середине справа находится соответствующее изображение различных изменений направления или областей Δ1-Δ5 изменений направления.
На фиг. 4 схематически изображено устройство 15а индикации, причем вверху слева показано изображение 14 последовательности изображений, создаваемое сенсорным блоком 12. При этом изображение 14 соответствует изображению на фиг. 3а).
В центре на устройстве 15а индикации слева, как было указано, изображено поле 16 характеристик скорости, а справа - поле 17 характеристик изменения направления. Значение цветов, градаций серого и/или текстур для скоростей или областей v1-v4 скоростей показано внизу слева, а для изменений направления или областей Δ1-Δ5 изменений направления - внизу справа.
На фиг. 4 показано устройство 15а индикации в определенный момент времени. При этом с течением времени показывается вся последовательность изображений, причем поле 16 характеристик скорости и поле 17 характеристик изменения направления всегда непосредственно адаптируются к следующим друг за другом изображениям последовательности изображений.
Регулирующее устройство 11 здесь и предпочтительно выполнено с возможностью сравнения скоростей и изменений направления, вычисленных блоком 13 обработки изображений, по меньшей мере с одним заданным граничным значением, здесь, соответственно, с верхним граничным значением и нижним граничным значением. При снижении ниже граничного значения, как уже было указано, осуществляются соответствующие меры регулирования сельскохозяйственной рабочей машины 1 и/или уборочного устройства 2 для убираемого материала.
Как показано на фиг. 3b), изображения 14 разделяются блоком 13 обработки изображений на различные области изображений. Как следует из фиг. 3а) и b), сенсорный блок 12 регистрирует полевую культуру 5 как перед уборочным устройством 2 для убираемого материала, так и за ним. Дополнительно сенсорный блок 12 здесь и предпочтительно может регистрировать устройство 7 для захвата убираемого материала, устройство 8 для срезания убираемого материала, устройство 9 для транспортировки убираемого материала и устройство 10 для втягивания убираемого материала. Также регистрируется поток убираемого материала внутри устройства 7 для захвата убираемого материала и поток убираемого материала вертикально над устройством 8 для срезания убираемого материала, в данном случае между устройством 7 для захвата убираемого материала и устройством 9 для транспортировки убираемого материала. Для обеспечения возможности изолирования релевантных областей с потоком убираемого материала, в изображениях 14 определяются области изображений, здесь и предпочтительно область 14а изображения с полевой культурой 5 перед уборочным устройством 2 для убираемого материала, область 14b изображения с полевой культурой 5 за уборочным устройством 2 для убираемого материала, область 14 с изображения с устройством 7 для захвата убираемого материала, область 14d изображения с устройством 8 для срезания убираемого материала, область 14е изображения с устройством 9 для транспортировки убираемого материала, область 14f изображения с устройством 10 для втягивания убираемого материала, область 14g изображения с потоком убираемого материала внутри устройства 7 для захвата убираемого материала и/или область 14h изображения с потоком убираемого материала вертикально над устройством 8 для срезания убираемого материала, в частности, в области между устройством 7 для захвата убираемого материала и устройством 9 для транспортировки убираемого материала.
Предпочтительно для всех этих областей 14а-h изображения блок 13 обработки изображений вычисляет скорости и/или изменения направления, которые объединяются в поле 16 характеристик скорости или поле 17 характеристик изменения направления.
Блок 13 обработки изображений здесь и предпочтительно разделяет обе области 14g и 14h изображения с соответствующим потоком убираемого материала на подобласти в направлении, поперечном направлению движения, что символически показано на фиг.4 вверху справа различными текстурами в областях 14g и 14h. Для каждой подобласти блок 13 обработки изображений определяет среднее значение скоростей потока материала, которое может быть абсолютным значением, но также может быть и отношением к опорному значению, в частности, верхнему граничному значению. В целях визуализации средние значения также могут быть изображены различными цветами, градациями серого и/или текстурами. В качестве альтернативы или дополнительно, могут также отображаться соответствующие числовые значения, в частности процентные значения (здесь не показано).
СПИСОК ИСПОЛЬЗУЕМЫХ ОБОЗНАЧЕНИЙ
1 Сельскохозяйственная рабочая машина
2 Уборочное устройство для убираемого материала
3 Жатка
4 Убираемый материал
5 Полевая культура
6 Другие рабочие органы
7 Устройство для захвата убираемого материала
8 Устройство для срезания убираемого материала
9 Устройство для транспортировки убираемого материала
10 Устройство для втягивания убираемого материала
11 Регулирующее устройство
12 Сенсорный блок
13 Блок обработки изображений
14 Изображения
14a-h Области изображений
15 Блок вывода данных
15а Устройство индикации
16 Поле характеристик скорости
17 Поле характеристик изменения направления
v1-v4 Области скоростей
Δ1-Δ5 Области изменений направления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА | 2017 |
|
RU2736730C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА | 2020 |
|
RU2816642C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА | 2016 |
|
RU2727648C2 |
| УСТРОЙСТВО ДЛЯ УБОРКИ СЕЛЬСКОХОЗЯЙСТВЕННОЙ КУЛЬТУРЫ (ВАРИАНТЫ) | 2019 |
|
RU2784488C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА И СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ СЕЛЬСКОХОЗЯЙСТВЕННОЙ КУЛЬТУРЫ ПРИ УБОРКЕ УРОЖАЯ ТАКОЙ СЕЛЬСКОХОЗЯЙСТВЕННОЙ УБОРОЧНОЙ МАШИНОЙ | 2021 |
|
RU2834932C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА | 2018 |
|
RU2769473C2 |
| СПОСОБ НАСТРОЙКИ, ПО МЕНЬШЕЙ МЕРЕ, ОДНОГО РАБОЧЕГО ОРГАНА САМОХОДНОЙ УБОРОЧНОЙ МАШИНЫ | 2011 |
|
RU2569958C2 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА УБРАННОЙ МАССЫ | 2008 |
|
RU2483522C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА | 2014 |
|
RU2647087C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ МАШИНА | 2005 |
|
RU2389171C2 |

Группа изобретений относится к сельскому хозяйству. Сельскохозяйственная рабочая машина, в частности уборочная машина, содержит уборочное устройство для убираемого материала, служащее для отделения и захвата убираемого материала из полевой культуры. Уборочное устройство содержит в качестве компонентов по меньшей мере одно устройство для срезания убираемого материала, следующее за ним устройство для транспортировки убираемого материала и следующее за ним устройство для втягивания убираемого материала. Сельскохозяйственная рабочая машина содержит регулирующее устройство, содержащее по меньшей мере один сенсорный блок для оптической регистрации потока убираемого материала, блок обработки изображений для обработки изображений, создаваемых сенсорным блоком на основе оптически зарегистрированного потока убираемого материала, и блок вывода данных для вывода изображений, обработанных блоком обработки изображений. Блок обработки изображений выполнен с возможностью на основе изображений, созданных сенсорным блоком, составления поля характеристик скорости. Блок обработки изображений выполнен с возможностью составления на основе изображений, созданных сенсорным блоком, в дополнение к полю характеристик скорости поля характеристик изменения направления. Данные из соответствующего поля характеристик изменения направления используют для проверки данных из соответствующего, совпадающего по времени поля характеристик скорости на достоверность. Предусмотрено привлечение обоих полей характеристик вместе или по отдельности регулирующим устройством для регулирования процессов в сельскохозяйственной рабочей машине и/или в уборочном устройстве для убираемого материала. Способ отслеживания уборочного устройства для убираемого материала сельскохозяйственной рабочей машиной, в котором посредством блока обработки изображений на основе изображений, созданных сенсорным блоком, составляют поле характеристик скорости; посредством блока обработки изображений на основе изображений, созданных сенсорным блоком, в дополнение к полю характеристик скорости составляют поле характеристик изменения направления; посредством регулирующего устройства привлекают оба поля характеристик вместе или по отдельности для регулирования процессов в машине и/или в уборочном устройстве для убираемого материала. Обеспечивается улучшение отслеживания уборочного устройства для убираемого материала с точки зрения точности, надежности и своевременности. 2 н. и 17 з.п. ф-лы, 4 ил.
1. Сельскохозяйственная рабочая машина (1), в частности уборочная машина,
с уборочным устройством (2) для убираемого материала, служащим для отделения и захвата убираемого материала (4) из полевой культуры (5), содержащим в качестве компонентов (7-10) по меньшей мере одно устройство (8) для срезания убираемого материала, следующее за ним устройство (9) для транспортировки убираемого материала и следующее за ним устройство (10) для втягивания убираемого материала, и
с регулирующим устройством (11), содержащим по меньшей мере один сенсорный блок (12) для оптической регистрации потока убираемого материала, блок (13) обработки изображений для обработки изображений (14), создаваемых сенсорным блоком (12) на основе оптически зарегистрированного потока убираемого материала, и блок (15) вывода данных для вывода изображений (14), обработанных блоком (13) обработки изображений,
причем блок (13) обработки изображений выполнен с возможностью на основе изображений (14), созданных сенсорным блоком (12), составления поля (16) характеристик скорости,
отличающаяся тем, что
блок (13) обработки изображений выполнен с возможностью составления на основе изображений (14), созданных сенсорным блоком (12), в дополнение к полю (16) характеристик скорости поля (17) характеристик изменения направления, причем данные из соответствующего поля (17) характеристик изменения направления используют для проверки данных из соответствующего, совпадающего по времени поля (16) характеристик скорости на достоверность,
причем предусмотрено привлечение обоих полей (16, 17) характеристик вместе или по отдельности регулирующим устройством (11) для регулирования процессов в машине (1) и/или в уборочном устройстве (2) для убираемого материала.
2. Машина (1) по п. 1, отличающаяся тем, что поле (16) характеристик скорости включает в себя скорости потока материала и/или скорости поверхностных участков машинных деталей компонентов (7-10) уборочного устройства (2) для убираемого материала и/или поле (17) характеристик изменения направления включает в себя изменения направления в потоке убираемого материала и/или изменения направления поверхностных участков машинных деталей компонентов (7-10) уборочного устройства (2) для убираемого материала.
3. Машина (1) по п. 1 или 2, отличающаяся тем, что блок (13) обработки изображений для составления обоих полей (16, 17) характеристик выполнен с возможностью группировки двух, в частности двух непосредственно следующих друг за другом, изображений (14) созданной сенсорным блоком (12) последовательности изображений в пару изображений, причем посредством блока (13) обработки изображений предусмотрена регистрация и/или задание временного промежутка между изображениями (14) соответствующей пары изображений, причем каждое изображение (14) соответствующей пары изображений содержит шаблон интенсивности.
4. Машина (1) по п. 3, отличающаяся тем, что блок (13) обработки изображений для составления обоих полей (16, 17) характеристик выполнен с возможностью определения сдвигов положения шаблонов интенсивности между изображениями (14) соответствующей пары изображений, причем сдвиги положения включают в себя величины сдвига и направления сдвига шаблонов интенсивности, причем, предпочтительно, предусмотрено объединение величин сдвига и направлений сдвига для каждой пары изображений в виде векторов векторного поля соответствующей пары изображений.
5. Машина (1) по п. 4, отличающаяся тем, что блок (13) обработки изображений выполнен с возможностью вычисления скоростей на основе величин сдвига шаблонов интенсивности между изображениями (14) соответствующей пары изображений и временного промежутка между изображениями (14) соответствующей пары изображений, причем, предпочтительно, скорости являются скоростями потока убираемого материала и/или скоростями поверхностных участков машинных деталей компонентов (7-10) уборочного устройства (2) для убираемого материала.
6. Машина (1) по одному из предшествующих пунктов, отличающаяся тем, что блок (15) вывода данных выполнен с возможностью графического отображения соответствующих скоростей, в частности, в виде областей (v1-v4) скоростей, объединяющих скорости, причем, предпочтительно, предусмотрено отображение различных скоростей или областей (v1-v4) скоростей различными цветами, градациями серого и/или текстурами.
7. Машина (1) по одному из пп. 4-6, отличающаяся тем, что блок (13) обработки изображений выполнен с возможностью сравнения направлений сдвига шаблонов интенсивности первой пары изображений с направлениями сдвига соответствующих шаблонов интенсивности второй пары изображений той же последовательности изображений, в частности пары изображений, следующей непосредственно за ней, и вычисления на основе этого изменений направления, причем, предпочтительно, изменения направления являются изменениями направления в потоке убираемого материала и/или изменениями направления поверхностных участков машинных деталей компонентов (7-10) уборочного устройства (2) для убираемого материала.
8. Машина (1) по одному из предшествующих пунктов, отличающаяся тем, что блок (15) вывода данных выполнен с возможностью графического отображения соответствующих изменений направления, в частности, в виде областей (Δ1-Δ5) изменений направления, объединяющих изменения направления, причем, предпочтительно, предусмотрено отображение различных изменений направления или областей (Δ1-Δ5) изменений направления различными цветами, градациями серого и/или текстурами.
9. Машина (1) по одному из пп. 6-8, отличающаяся тем, что предусмотрено отображение графического изображения скоростей и/или графического изображения изменений направления в устройстве (15а) индикации блока (15) вывода данных, в частности, рядом друг с другом, причем, предпочтительно, в устройстве (15а) индикации дополнительно также предусмотрено отображение последовательности изображений.
10. Машина (1) по одному из предшествующих пунктов, отличающаяся тем, что регулирующее устройство (11) выполнено с возможностью сравнения скоростей, вычисленных блоком (13) обработки изображений, по меньшей мере с одним заданным граничным значением, в частности с верхним граничным значением и нижним граничным значением, и регулирования машины (1) или по меньшей мере одного из компонентов (7-10) уборочного устройства (2) для убираемого материала при снижении ниже соответствующего граничного значения.
11. Машина по одному из предшествующих пунктов, отличающаяся тем, что регулирующее устройство (11) выполнено с возможностью сравнения изменений направления, вычисленных блоком (13) обработки изображений, по меньшей мере с одним заданным граничным значением, в частности с верхним граничным значением и нижним граничным значением, и регулирования машины (1) или по меньшей мере одного из компонентов (7-10) уборочного устройства (2) для убираемого материала при снижении ниже соответствующего граничного значения.
12. Машина (1) по одному из предшествующих пунктов, отличающаяся тем, что сенсорный блок (12) выполнен с возможностью регистрации:
- полевой культуры (5) перед уборочным устройством (2) для убираемого материала по направлению движения, и/или
- полевой культуры (5) за уборочным устройством (2) для убираемого материала по направлению движения, и/или
- по меньшей мере одного из компонентов (7-10) уборочного устройства (2) для убираемого материала, в частности устройства (7) для захвата убираемого материала, устройства (8) для срезания убираемого материала, устройства (9) для транспортировки убираемого материала и/или устройства (10) для втягивания убираемого материала, и/или
- потока убираемого материала внутри устройства (7) для захвата убираемого материала, и/или
- потока убираемого материала вертикально над устройством (8) для срезания убираемого материала, в частности, между устройством (7) для захвата убираемого материала и устройством (9) для транспортировки убираемого материала по направлению движения.
13. Машина (1) по одному из предшествующих пунктов, отличающаяся тем, что блок (13) обработки изображений выполнен с возможностью определения в изображениях (14) областей (14a-14h) изображений, из которых:
- область (14а) изображения по меньшей мере частично отображает полевую культуру (5) перед уборочным устройством (2) для убираемого материала по направлению движения, и/или
- область (14b) изображения по меньшей мере частично отображает полевую культуру (5) за уборочным устройством (2) для убираемого материала по направлению движения, и/или
- область (14 с) изображения по меньшей мере частично отображает устройство (7) для захвата убираемого материала, и/или
- область (14d) изображения по меньшей мере частично отображает устройство (8) для срезания убираемого материала, и/или
- область (14е) изображения по меньшей мере частично отображает устройство (9) для транспортировки убираемого материала, и/или
- область (14f) изображения по меньшей мере частично отображает устройство (10) для втягивания убираемого материала, и/или
- область (14g) изображения по меньшей мере частично отображает поток убираемого материала внутри устройства (7) для захвата убираемого материала, и/или
- область (14h) изображения по меньшей мере частично отображает поток убираемого материала вертикально над устройством (8) для срезания убираемого материала, в частности, между устройством (7) для захвата убираемого материала и устройством (9) для транспортировки убираемого материала по направлению движения.
14. Машина (1) по п. 13, отличающаяся тем, что блок (13) обработки изображений выполнен с возможностью вычисления скоростей и/или изменений направления для по меньшей мере одной, в частности для всех, области изображения и составления соответствующего поля (16, 17) характеристик.
15. Машина (1) по п. 13 или 14, отличающаяся тем, что блок (13) обработки изображений выполнен с возможностью разделения области изображения с потоком убираемого материала внутри устройства (7) для захвата убираемого материала и/или области изображения с потоком убираемого материала вертикально над устройством (8) для срезания убираемого материала, в частности, между устройством (7) для захвата убираемого материала и устройством (9) для транспортировки убираемого материала по направлению движения на подобласти в направлении, поперечном направлению движения, и определения для каждой подобласти среднего значения скоростей потока убираемого материала, причем среднее значение является абсолютным значением или отношением к опорному значению, в частности верхнему граничному значению.
16. Машина (1) по п. 15, отличающаяся тем, что блок (15) вывода данных выполнен с возможностью графического отображения среднего значения, причем, предпочтительно, предусмотрено отображение среднего значения в виде числового значения, в частности процентного значения, и/или предусмотрено отображение различных средних значений различными цветами, градациями серого и/или текстурами.
17. Машина (1) по одному из предшествующих пунктов, отличающаяся тем, что регулирование процессов, основанное на поле (16) характеристик скорости и/или поле (17) характеристик изменения направления, включает в себя:
- регулирование скорости движения машины (1), и/или
- регулирование скорости и/или положения по меньшей мере одного из компонентов (7-10) уборочного устройства (2) для убираемого материала, и/или
- регулирование скорости и/или положения по меньшей мере одного из рабочих органов (6) машины (1).
18. Машина (1) по одному из предшествующих пунктов, отличающаяся тем, что устройство (7) для захвата убираемого материала представляет собой мотовило, и/или устройство (8) для срезания убираемого материала представляет собой платформу жатки с ножевым брусом, и/или устройство (9) для транспортировки убираемого материала представляет собой транспортный шнек, и/или устройство (10) для втягивания убираемого материала представляет собой наклонный транспортер.
19. Способ отслеживания уборочного устройства для убираемого материала сельскохозяйственной рабочей машиной (1) по одному из предшествующих пунктов, в котором
посредством блока (13) обработки изображений на основе изображений (14), созданных сенсорным блоком (12), составляют поле (16) характеристик скорости,
отличающийся тем, что
посредством блока (13) обработки изображений на основе изображений (14), созданных сенсорным блоком (12), в дополнение к полю (16) характеристик скорости составляют поле (17) характеристик изменения направления,
причем посредством регулирующего устройства (11) привлекают оба поля (16, 17) характеристик вместе или по отдельности для регулирования процессов в машине (1) и/или в уборочном устройстве (2) для убираемого материала.
| EP 3150047 A1, 05.04.2017 | |||
| US 9345194 B2, 24.05.2016 | |||
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2009 |
|
RU2402896C1 |
| СИСТЕМА И СПОСОБ АВТОМАТИЧЕСКОГО ДОКУМЕНТИРОВАНИЯ СИТУАЦИЙ ПРИ ПОЛЕВЫХ РАБОТАХ | 2012 |
|
RU2605775C2 |

