Изобретение относится к авиационному тренажеру, а также к способу имитации полета в соответствии с ограничительной частью независимых пунктов формулы изобретения.
Авиационные тренажеры известны и опубликованы в различных конфигурациях. Например, известны авиационные тренажеры, в которых кабина тренажера смонтирована на напольном гексаподе. Гексапод представляет собой конфигурацию параллельного кинематического устройства, в котором носитель может быть перемещен относительно основания по шести степеням свободы посредством изменения длин отдельных устройств линейного перемещения. Эти шесть степеней свободы соответствуют трем вращательным и трем поступательным степеням свободы.
Такие гексаподы являются стандартными сборками и используются для перемещения и управления кабинами тренажеров. Недостатком обычных авиационных тренажеров является то, что особая конструкция гексаподов ограничивает свободу движения. Наклон кабины относительно оси тангажа ограничен на около ±20°, соблюдая обычные контрольные ограничения. Это означает, что человека или кабину тренажера можно наклонить на угол не более 20° назад и не более 20° вперед. Следовательно, продольная ось человека или кабины тренажера может быть наклонена менее чем на 20° вверх или вниз, переходя от горизонтального направления, при этом соблюдая обычные контрольные ограничения.
Однако эта свобода движения не отвечает требованиям для моделирования особых полетных ситуаций. Например, одной такой особой полетной ситуацией является так называемый «развившийся срыв», во время которого в критических элементах крыльев возникает развившийся срыв потока. Для увеличения свободы движения в предшествующем уровне техники предлагаются сложные конструкции, предназначенные для предотвращения столкновения между отдельными устройствами линейного перемещения. Однако, на практике такие конфигурации вряд ли могут быть успешными, поскольку управление этими специальными механизмами слишком сложно, чтобы быть экономически выгодным с учетом небольших количеств. Напротив, интерфейсы управления имеются и известны в обычных гексаподах.
Свобода движения или характеристики движения обычных тренажеров на основе гексапода (также называемых конверт) излагаются на основе наихудших сценариев, в которых максимальные углы отклонения тренажера возникают - только гипотетически - в этих наихудших ситуациях, в то время как это фактически никогда не встречается во время реальной работы тренажера. При моделировании реально вероятного срыва потока, наклон кабины тренажера в обычных тренажерах, таким образом, далек от максимальной свободы движения гексапода, так что потенциально доступная свобода движения гексапода на самом деле нисколько не исчерпана.
В результате, развившийся срыв потока не может быть смоделирован достаточно корректно в обычных тренажерах на основе гексаподов, а скорее находится только на начальной стадии или в частичном срыве потока.
Целью данного изобретения является предоставление комплексного авиационного тренажера (далее по тексту - авиационный тренажер) и способа имитации полета, которые преодолевают недостатки предшествующего уровня техники, тем самым обеспечивая усовершенствованную имитацию полета. В частности, человек может быть наклонен более чем на 20° или 25°, например так, чтобы развившийся срыв мог быть симулировать с достаточно точным восприятием.
Цели, в соответствии с данным изобретением, достигаются с помощью признаков в независимых пунктах формулы изобретения.
Там, где это применимо, данное изобретение относится к авиационному тренажеру, содержащему:
- кабину тренажера, при этом в кабину тренажера вмонтировано сиденье для оператора, при необходимости устройство отображения изображения для отображения имитируемой среды и предпочтительно по меньшей мере один элемент управления для генерирования данных управления имитацией и, в частности, для управления имитируемым воздушным судном и для влияния оператора на имитирование,
- параллельное кинематическое устройство, которое содержит основание, несущий элемент и несколько устройств линейного перемещения, причем несущий элемент соединен с основанием, по меньшей мере, тремя, предпочтительно шестью устройствами линейного перемещения, и в котором основание скреплено или соединено полом и несущим элементом с кабиной тренажера, при необходимости, чтобы кабина тренажера располагалась на параллельном кинематическом устройстве или имела напольную конструкцию, в которой кабина тренажера имеет основное положение, которое по существу соответствует установившемуся прямолинейному полету имитируемого летательного аппарата, и в котором продольная ось имитируемого летательного аппарата или оператора, по существу, проходит горизонтально, причем кабина тренажера имеет максимальное положение положительного наклона, в котором продольная ось, переходя от горизонтального направления, наклоняется вверх насколько это возможно, в качестве первого угла тангажа в диапазоне кинематических возможностей параллельного кинематического устройства, соблюдая любые обычные контрольные ограничения, которые могут быть предусмотрены, и оператор, в результате, отклоняется назад, причем наклон предпочтительно выполняется относительно оси тангажа или относительно оси, параллельной оси тангажа, при том, что кабина тренажера приобретает положение максимального отрицательного наклона, в котором продольная ось, переходя от горизонтального направления, наклоняется вниз на второй угол тангажа в диапазоне кинематических возможностей параллельного кинематического устройства, соблюдая любые контрольные ограничения, которые могут быть предусмотрены, и оператор, в результате, наклоняется вперед, при этом наклон предпочтительно выполняется относительно оси тангажа или относительно оси, параллельной оси тангажа, и где первый угол тангажа больше 25°.
Там, где это применимо, предусмотрено, что значение первого угла тангажа больше, чем значение второго угла тангажа, или что значение первого угла тангажа больше, чем значение второго угла тангажа на угол отклонения.
Там, где это применимо, предусмотрено, что наклон кабины тренажера относительно оси тангажа или относительно оси, параллельной оси тангажа, между максимальным отрицательным наклоном и максимальным положительным наклоном, происходит исключительно путем приведения в действие параллельного кинематического устройства.
Там, где это применимо, предусмотрено, чтобы устройства линейного перемещения были сконструированы как устройства линейного перемещения с переменной длиной, которую можно регулировать или управлять ею, причем длина устройств линейного перемещения лежит между или в пределах минимальной длины и максимальной длины, так что несущий элемент может быть повернут относительно основания по меньшей мере в двух осях посредством изменения длины устройств линейного перемещения и, потенциально, имеет три вращательные степени свободы и три поступательные степени свободы.
Там, где это применимо, предусмотрено, что устройства линейного перемещения расположены попарно, причем два устройства линейного перемещения, содержащие пару устройств линейного перемещения, наклонены относительно друг друга, тем самым образуя, в частности, гексапод.
Там, где это применимо, предусмотрено, что параллельное кинематическое устройство имеет параллельное кинематическое основное положение, в котором основание и несущий элемент, по существу, проходят параллельно, и что параллельное кинематическое устройство расположено в положении, отклоняющемся от параллельного кинематического основного положения, когда кабина тренажера расположена в своем основном положении.
Там, где это применимо, предусмотрено, что параллельное кинематическое устройство имеет параллельное кинематическое основное положение, в котором основание и несущий элемент по существу параллельны, и что основание наклонено относительно несущего элемента относительно оси тангажа или относительно оси, параллельной оси тангажа, когда кабина тренажера расположена в своем основном положении.
Там, где это применимо, предусмотрено, что параллельное кинематическое устройство имеет параллельное кинематическое основное положение, в котором основание и несущий элемент, по существу, проходят параллельно и в которых продольная ось направлена вверх под положительным углом отклонения и в котором кабина тренажера расположена в положении, отклоняющемся от ее основного положения.
Там, где это применимо, предусмотрено, чтобы основание было наклонено вверх под положительным углом отклонения относительно горизонтальной плоскости, или что продольная ось была бы направлена вверх под положительным углом отклонения относительно направления несущего элемента, или что основание было бы вертикально наклонено относительно горизонтальной плоскости, а вместе с ним продольная ось была бы наклонена вверх относительно направления несущего элемента под положительным углом отклонения, причем угол отклонения предпочтительно указывается в плоскости, нормальной к оси тангажа.
Там, где это применимо, предусмотрено, что клиновидное устройство, имеющее вид клина или действующее подобно клину, расположено между основанием и полом, чтобы обеспечить наклон основания относительно горизонтальной плоскости.
Там, где это применимо, предусмотрено, что клиновидное устройство, имеющее вид клина или, действующее подобно клину, расположено между кабиной тренажера и несущим элементом, чтобы обеспечить наклон продольной оси относительно направления несущего элемента.
Там, где это применимо, предусмотрено, что клиновидное устройство представляет собой жесткое клиновидное устройство, угол клина которого остается неизменным во время имитирования.
Там, где это применимо, предусмотрено, что все устройства линейного перемещения, по существу, имеют одинаковую минимальную и максимальную длину и, в частности, конструктивно идентичны по исполнению, тем самым образуя симметричное параллельное кинематическое устройство.
Там, где это применимо, предусмотрено, что переднее устройство линейного перемещения или пара передних устройств линейного перемещения, как видно вдоль направления наблюдения оператора, имеют большую максимальную длину, чем заднее устройство линейного перемещения или пара задних устройств линейного перемещения, тем самым образуя асимметричное параллельное кинематическое устройство.
Там, где это применимо, в параллельном кинематическом основном положении предусмотрено, что угол установки переднего устройства линейного перемещения или пары передних линейных устройств перемещения, как видно в направлении наблюдения оператора, будет более крутым, чем угол установки заднего линейного устройства перемещения или пары задних линейных устройств перемещения, тем самым образуя симметричное параллельное кинематическое устройство.
Там, где это применимо, предусмотрено, что второй угол тангажа имеет размер от -10° до -25°, что второй угол тангажа имеет размер от -10° до 22° и/или что второй угол тангажа имеет размер от -19° до -21°.
Там, где это применимо, предусмотрено, что первый угол тангажа имеет размер от 25° до 35°, что первый угол тангажа имеет размер между 28° и 35°, что первый угол тангажа имеет размер от 29° до 35°, что первый угол тангажа имеет размер от 30° до 35°, что первый угол тангажа имеет размер от 32° до 35° и/или что первый угол тангажа имеет размер от 29° до 31°.
Там, где это применимо, предусмотрено, что угол отклонения имеет размер между около 2° до 20°, между около 2° и 12°, между около 3° и 10°, между 4° и 8° и/или около 5°.
Там, где это применимо, предусмотрено, что между полом и основанием или между несущим элементом и кабиной тренажера предусмотрена поворотная пластина или поворотная панель, так что кабина тренажера может поворачиваться вокруг вертикальной оси, в частности вокруг оси рыскания.
Там, где это применимо, предусмотрено, что управляющее устройство включает регулирующую модель, предусмотренную для обработки данных управления имитацией и управления параллельным кинематическим устройством, при этом управляющее устройство может использоваться для перевода кабины тренажера из максимально положительного положения тангажа в максимально отрицательное положение тангажа, причем максимально положительное положение тангажа и максимально отрицательное положение тангажа определяют свободу движения для кабины тренажера в отношении тангажа.
Там, где это применимо, изобретение относится к способу имитации полета на авиационном тренажере по одному из предшествующих пунктов, включающему следующие этапы:
- приведение в действие параллельного кинематического устройства так, чтобы кабина тренажера находилась в своем основном положении,
- затем приведение в действие параллельного кинематического устройства так, что кабина тренажера отклонена назад от своего основного положения относительно оси тангажа или относительно оси, параллельной оси тангажа, с положительным углом тангажа более, чем 25°.
Там, где это применимо, предусмотрено, что установившийся прямолинейный полет имитируется при первом приведении в действие параллельного кинематического устройства, которое приводит кабину тренажера в ее основное положение, а также что развившийся срыв моделируется вторым приведением в действие параллельного кинематического устройства, которое наклоняет кабину тренажера назад от ее основного положения относительно оси тангажа или относительно оси, параллельной оси тангажа, на положительный угол тангажа больший, чем 25°.
Там, где это применимо, предусмотрено, что кабина тренажера отклоняется назад от основного положения относительно оси тангажа или относительно оси, параллельной оси тангажа, на положительный угол тангажа больший, чем 25°, исключительно путем приведения в действие параллельного кинематического устройства.
Там, где это применимо, предусмотрено, что положительный угол тангажа составляет 28°, 29°, 30°, 31°, 32°, 33°, 34°, 35° или более.
Там, где это применимо, предусмотрено, что установившийся прямолинейный полет имитируется при первом приведении в действие параллельного кинематического устройства, которое приводит кабину тренажера в ее основное положение, и что срыв потока или развившийся срыв имитируется при втором приведении в действие параллельного кинематического устройства, которое наклоняет кабину тренажера назад от ее основного положения относительно оси тангажа или относительно оси, параллельной оси тангажа, на положительный угол тангажа больший, чем 25°, и что сымитированная полетная ситуация здесь отличается от наихудшего сценария, нарисованного для интерпретации свободы движения или характеристик движения обычного тренажера.
Там, где это применимо, предусмотрено, что установившийся прямолинейный полет имитируется при первом приведении в действие параллельного кинематического устройства, что приводит кабину тренажера в ее основное положение, причем имитируемая скорость ниже максимальной скорости имитируемого летательного аппарата и, в частности, более чем на 10% ниже максимальной скорости имитируемого летательного аппарата, и что срыв потока или развившийся срыв имитируется при втором приведении в действие параллельного кинематического устройства, которое наклоняет кабину тренажера назад от ее основного положения относителльно оси тангажа или относительно оси, параллельной оси тангажа, на положительный угол тангажа больший, чем 25°, при этом имитируемая скорость ниже во время срыва потока, чем максимальная скорость имитируемого летательного аппарата, и, в частности, более чем на 10% ниже максимальной скорости имитируемого летательного аппарата, и, следовательно, отличается от наихудшего сценария, нарисованного для интерпретации свободы движения или характеристик движения обычного тренажера.
Там, где это применимо, данное изобретение относится к регулирующей модели и/или способу регулирования для любого имитатора движения, например, имитатора движения с гексаподом, одноплечевой центрифуги, многоплечевой центрифуги, одно- или многоплечевой центрифуги с подвижной тележкой, при этом имитатор движения пригоден или настроен для имитации самолета, вертолета, автотранспортного средства и/или корабля, В частности для имитации любых транспортных средств, и где регулирующая модель и/или способ регулирования настроена(ы) в соответствии с Фиг. 4, в соответствии с описанием, сопровождающим Фиг. 4, и/или в соответствии со всем описанием.
Там, где это применимо, основание жестко связано с полом. Там, где это применимо, несущий элемент жестко связан с кабиной тренажера.
Там, где это применимо, авиационный тренажер во всех вариантах реализации спроетирован как так называемый "полнополетный тренажер", в котором оператор может управлять летательным аппаратом в имитируемой среде посредством элементов управления и в которых сенсорные воздействия, возникающие в соответственной реальной полетной ситуации, достаточно или оптимально, а также сенсорно точно имитируются для оператора.
Там, где это применимо, предусмотрено, что угол клина клиновидного устройства соответствует углу отклонения.
В целях большей ясности несколько терминов будут определены ниже.
Продольная ось соответствует оси, которая по существу отслеживает в равновесном состоянии направление прямо вперед. В частности, продольная ось представляет собой горизонтально идущую ось, например, ту, которой следует самолет во время установившегося прямолинейного полета.
В частности, ось рыскания представляет собой ось, которая перпендикулярна продольной оси и, в частности, проходит по существу вертикально или лежит в вертикальной плоскости. Ось тангажа - это ось, которая перпендикулярна двум вышеуказанным осям. В частности, ось тангажа является горизонтальной осью, которая проходит слева направо или справа налево. По определению ось тангажа, ось рыскания и продольная ось предпочтительно сходятся в точке или в области. Эта точка или область предпочтительно находится в зоне головы оператора. Там это где применимо, эта точка или область, однако, находится в зоне, удаленной от головы человека. Направления осей определяются, в частности, свойствами имитируемого летательного аппарата.
Там, где это применимо, параллельное кинематическое устройство настроено или отрегулировано таким образом, что передние устройства линейного перемещения обеспечивают повышенный подъем или увеличенную свободу движения для кабины тренажера. Во всех вариантах реализации изобретения перед обозначает направление, лежащее спереди, для оператора в основном положении тренажера. Например, расположенная в центре пара устройств линейного перемещения предусмотрена спереди данной конфигурации гексапода. Два устройства линейного перемещения расположены поперечно в стороне от вертикальной средней продольной плоскости в задней части параллельного кинематического устройства.
Там, где это применимо, кабину тренажера также поворачивают на 90°, 180° или на другой угол относительно этой конфигурации. Передние устройства линейного перемещения в данном случае всегда представляют собой устройства линейного перемещения, которые пролегают спереди, как это видит оператор в основном положении.
Там, где это применимо, кабина тренажера в своем основном положении, таким образом, может иметь спереди два устройства линейного перемещения, в частности одну пару устройств линейного перемещения, и четыре устройства линейного перемещения сзади, в частности две пары устройств линейного перемещения.
В конфигурации, повернутой на 180°, кабина тренажера может быть оборудована спереди четырьмя устройствами линейного перемещения, в частности двумя парами устройств линейного перемещения, а сзади - двумя устройствами линейного перемещения, в частности, одной парой устройств линейного перемещения,
Эти две конфигурации применяются, в частности, для параллельного кинематического устройства, сконструированного в виде гексапода. Кабина тренажера предпочтительно симметрично расположена на гексаподе или на параллельном кинематическом устройстве в основном положении, так что свобода движения влево и вправо конструктивно симметрична, при движении качения вокруг продольной оси.
Далее изобретение будет описано дополнительно на основе фигур, при этом Фиг. 1 схематически изображает наклонный вид параллельного кинематического устройства, Фиг. 2а, 2b, 2с и 2d схематически изображают виды сбоку различных вариантов реализации авиационных тренажеров в соответствии с изобретением, и под ними схематически изображено, где закреплены параллельные кинематические устройства, при этом на Фиг. 3 схематически изображен вид сбоку возможного варианта реализации изобретения, а на Фиг. 4 изображена примерная регулирующая модель для устройства в соответствии с данным изобретением.
Если не указано иное, номера ссылок соответствуют следующим компонентам: кабина тренажера 1, сиденье 2, оператор 3, устройство отображения изображения 4, элемент управления 5, параллельное кинематическое устройство 6, основание 7, устройство линейного перемещения 8, несущий элемент 9, пол 10, продольная ось 11, первый угол тангажа 12, второй угол тангажа 13, угол отклонения 14, ось тангажа 15, длина (устройства линейного перемещения) 16, переднее устройство линейного перемещения 17, заднее устройство линейного перемещения 18, поворотная пластина 19, ось рыскания 20, клиновидное устройство 21, модель полета 22, модель восприятия 23, целевая функция 24, ограничение(я) 25, алгоритм оптимального управления или оптимального регулирования 26, модель восприятия 27, кинематическая модель тренажера 28, компоненты авиационного тренажера, подлежащие регулированию 29, необязательная обратная связь 30, управляющие входные данные 31.
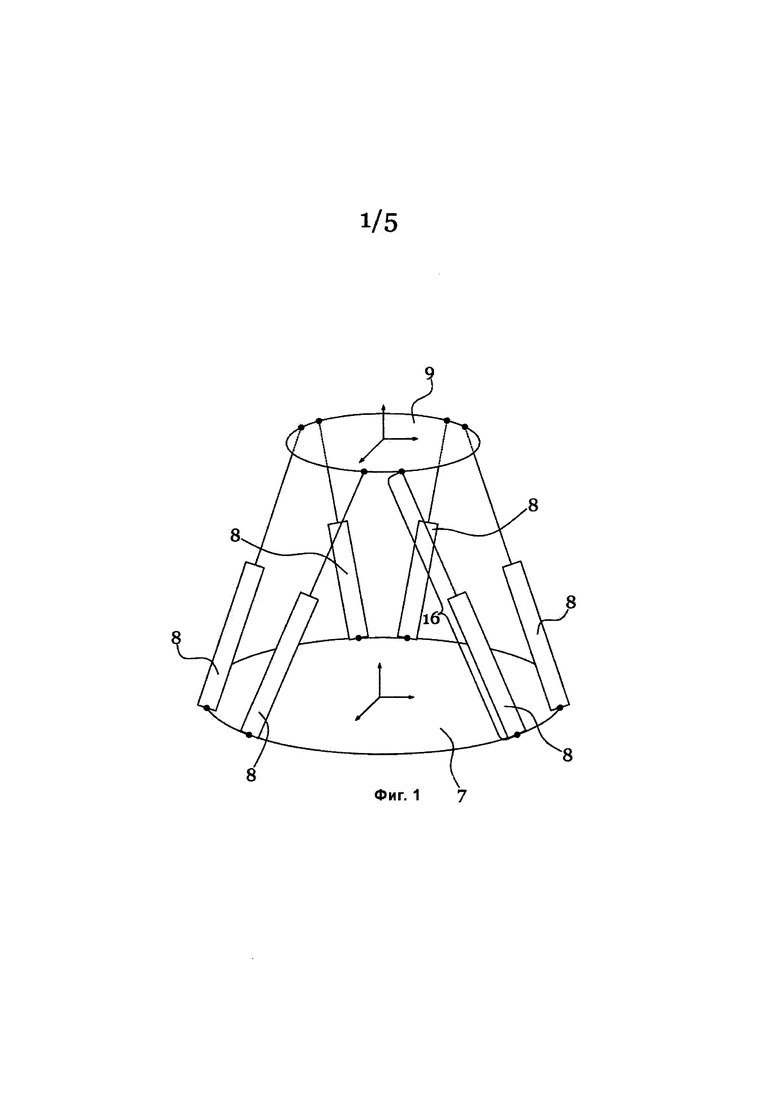
Фиг. 1 изображает схематический наклонный вид обычного гексапода и, в частности, кинематической конфигурации обычного гексапода, в которой этот гексапод может потенциально использоваться в качестве параллельного кинематического устройства 6 в авиационном тренажере в соответствии с данным изобретением.
Параллельное кинематическое устройство 6 содержит основание 7, несущий элемент 9 и несколько устройств линейного перемещения 8. Устройства линейного перемещения 8 имеют переменную длину 16. Устройства линейного перемещения 8, например, выполняют в виде гидравлических цилиндров во всех вариантах исполнения. Однако, там, где это применимо, эти устройства линейного перемещения 8 также могут быть сконструированы как устройства линейного перемещения с электрическим приводом или потенциально как устройства линейного перемещения с пневматическим приводом во всех вариантах реализации изобретения. Устройства линейного перемещения 8 могут быть увеличены с минимальной длины до максимальной длины контролируемым или регулируемым способом. Устройства линейного перемещения 8 могут быть остановлены также в каждом промежуточном положении, если задана конкретная длина 16. Изменение длины устройств линейного перемещения 8 контролируемым способом позволяет перемещать несущий элемент 9 относительно основания. В частности, несущий элемент 9 может быть наклонен относительно основания 7 посредством трех осей вращения и поступательно перемещен вдоль трех степеней свободы. Устройства линейного перемещения 8 потенциально входят в контакт на несущем элементе 9 и/или на основании 7 вдоль окружности. В частности, эти точки зацепления могут быть предусмотрены на основании 7 и/или на несущем элементе равномерно, симметрично, симметрично по кручению, симметрично по вращению или по заданной схеме. Например, два соответствующих устройства линейного перемещения 8 расположены парами, что приводит к созданию пары устройств линейного перемещения. Два устройства линейного перемещения 8 из пары устройств линейного перемещения предпочтительно не параллельны друг другу, но вместо этого, в частности, являются скошенными или наклонными относительно друг друга.
Там, где это применимо, все устройства линейного перемещения 8 конструктивно идентичны или сконфигурированы с одинаковой длиной или одинаковым диапазоном длины во всех вариантах реализации изобретения, имея в виду симметричное параллельное кинематическое устройство 6 или симметричный гексапод. Все устройства линейного перемещения 8 имеют минимальную длину и максимальную длину, причем эти минимальные и максимальные длины потенциально могут быть одинаковыми для всех устройств линейного перемещения 8. Основание 7 предпочтительно является напольным по конструкции или соединено с полом. Несущий элемент 9 предпочтительно настроен для переноса подлежащего перемещению объекта, например кабины тренажера 1. В частности, кабина тренажера 1 (не показана) соединена с несущим элементом 9. Параллельное кинематическое устройство 6 предпочтительно представляет собой напольное устройство по конструкции. Там, где это применимо, основание 7 соединено с полом 10. Во всех примерных вариантах реализации изобретения пол 10, например, может быть полом в тренажерном зале или в организации.
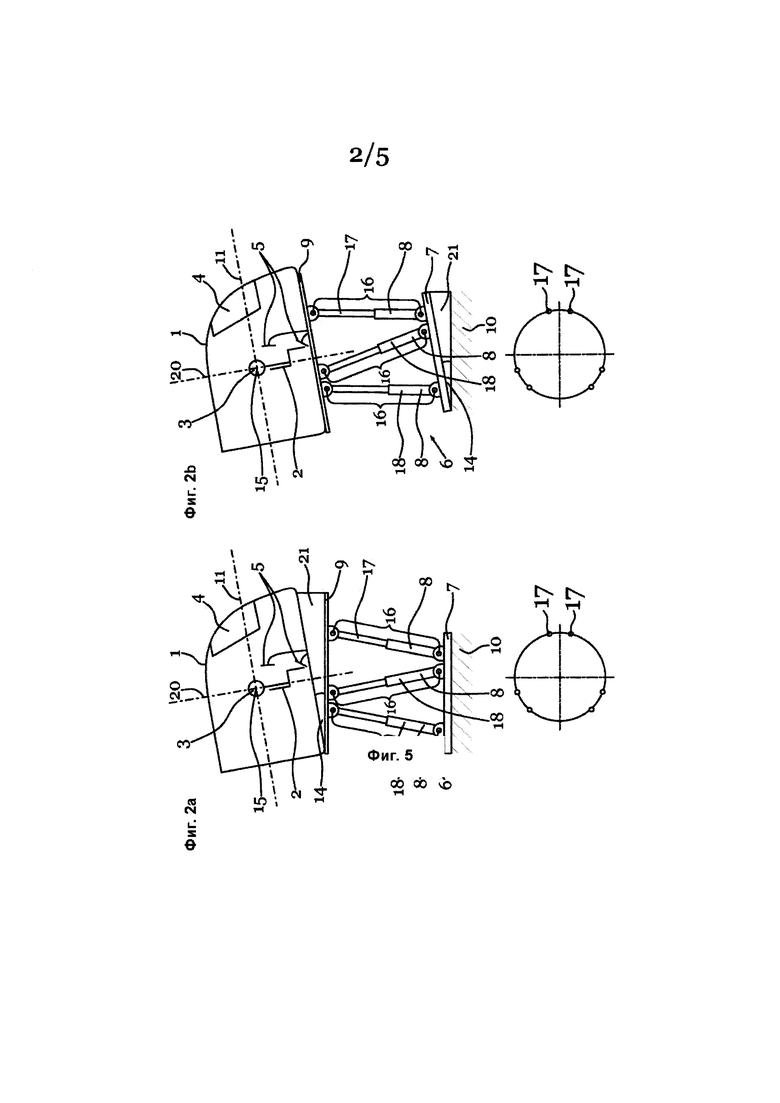
Фиг. 2а изображает схематический вид сбоку возможного варианта реализации авиационного тренажера в соответствии с данным изобретением. Кабина тренажера 1 с сиденьем 2 для оператора 3, устройство отображения изображения 4 вместе с элементами управления 5 расположено на параллельном кинематическом устройстве 6. Сиденье служит для размещения оператора 3. Устройство отображения изображения 4 является подходящим и/или настраиваемым для отображения имитируемой среды и/или другой информации. Элементы управления 5 являются подходящими и/или настраиваемыми для формирования управляющих сигналов, так что оператор может влиять на имитирование. Например, элементы управления 5 во всех вариантах реализации изобретения дублируют управляющие элементы летательного аппарата для их имитации. Имитируемый летательный аппарат может быть перемещен и/или управляем в имитируемой среде посредством приведения в действие этих элементов управления 5. Система обработки данных может быть использована для обработки управляющих данных, чтобы выполнять управление или регулировку параллельного кинематического устройства 6. Состояния ускорений, которые напоминают или повторяют условия имитированного полета, могут быть воспроизведены для оператора 3 путем изменения положения или наклона кабины тренажера 1 и сиденья 2, предусмотренного в ней. В данном варианте реализации изобретения параллельное кинематическое устройство 6 сконструировано в виде симметричного параллельного кинематического устройства 6. Оно содержит основание 7, которое по существу горизонтально следует полу 10. Параллельное кинематическое устройство 6 дополнительно содержит несущий элемент 9, который в данном положении также работает по существу горизонтально. В частности, несущий элемент 9 по существу проходит параллельно основанию 7. Это положение параллельного кинематического устройства 6 соответствует параллельному кинематическому основному положению. В этом положении все устройства линейного перемещения 8 предпочтительно имеют одинаковую длину 16. Точки соединения устройств линейного перемещения 8 предпочтительно симметрично, однородно или равномерно распределены по окружности на основании 7 или несущем элементе 9. Положение кабины тренажера 1 может быть изменено посредством изменения длины устройств линейного перемещения 8. В данном варианте реализации изобретения клиновидное устройство 21 предусмотрено между кабиной тренажера 1 и несущим элементом 9. Это клиновидное устройство 21 схематически изображается как клин. Однако это может быть устройство, которое действует как клин во всех вариантах реализации изобретения. Например, кабина тренажера 1 может содержать жесткую пластину пола или жесткую опору пола, которая находится на расстоянии от несущего элемента 9 посредством разделительного элемента на одной стороне, в частности, в передней части, так что кабина тренажера 1 наклонена относительно несущего элемента 9. Этот наклон предпочтительно выполняется относительно оси тангажа или относительно оси, параллельной оси тангажа. Угол для этого наклона потенциально соответствует углу отклонения 14 во всех вариантах реализации изобретения.
В положении, изображенном на Фиг. 2а, кабина тренажера 1 не расположена в своем основном положении, а скорее отклонена назад под определенным углом относительно угла тангажа, и, в частности, назад под углом отклонения. Этот вид содержит проекцию оси тангажа 15. В частности, она расположена на пересечении между продольной осью 11 и осью рыскания 20.
Например, это положение соответствует положению, которое в имитируемой среде имитирует продольное ускорение летательного аппарата или подъем летательного аппарата.
В данном варианте реализации изобретения параллельное кинематическое устройство 6 содержит шесть устройств линейного перемещения 8, в результате чего параллельное кинематическое устройство 6 сконструировано в виде гексапода. Три из устройств линейного перемещения 8 не показаны, поскольку они выровнены позади трех видимых устройств линейного перемещения 8.
Признаки на Фиг. 2b по существу соответствуют признакам на Фиг. 2а, при этом согласно варианту реализации изобретения клиновидное устройство 21 на Фиг. 2b предусмотрено между полом 10 и основанием 7. В этом варианте реализации изобретения или в этом положении параллельное кинематическое устройство 6 находится в своем параллельном кинематическом основном положении, в котором все устройства линейного перемещения 8 имеют одинаковую длину 16, как изображено на Фиг. 2а. В данном варианте реализации изобретения параллельное кинематическое устройство 6 в целом наклонено под углом, в котором параллельное кинематическое устройство 6 наклонено относительно оси тангажа или относительно оси, параллельной оси тангажа. В частности, параллельное кинематическое устройство 6 отклонено назад на угол отклонения 14. Кабина тренажера 1 не находится в своем основном положении, а скорее также отклонена назад. Также, параллельное кинематическое устройство 6 на Фиг. 2b выполнено в виде симметричного параллельного кинематического устройства 6.
Чтобы имитировать установившийся прямолинейный полет, в течение которого кабина тренажера 1 находится в своем основном положении, длина устройств линейного перемещения 8 теперь изменяется таким образом, чтобы кабина тренажера 1 или оператор 3 были по существу установлены горизонтально. В частности, в конфигурациях согласно Фиг. 2а или 2b, передние устройства линейного перемещения 17 укорачиваются относительно задних устройств линейного перемещения 18, чтобы расположить кабину тренажера 1 в ее основном положении. В этом основном положении продольная ось 1 предпочтительно проходит горизонтально. Ось рыскания 20 предпочтительно по существу проходит вертикально.
В результате этой конфигурации кабина тренажера 1 расположена в своем основном положении, а параллельное кинематическое устройство 6 расположено вне параллельного кинематического основного положения, тем самым достигая изобретательского эффекта увеличения свободы движения вверх при наклоне относительно оси тангажа 15, при этом свобода движения вверх при наклоне относительно оси тангажа потенциально уменьшается в данной конфигурации на Фиг. 2а и Фиг. 2b. В частности, свобода движения при положительном наклоне относительно оси тангажа увеличивается в направлении вверх на угол отклонения 14, и в направлении вниз на угол отклонения.
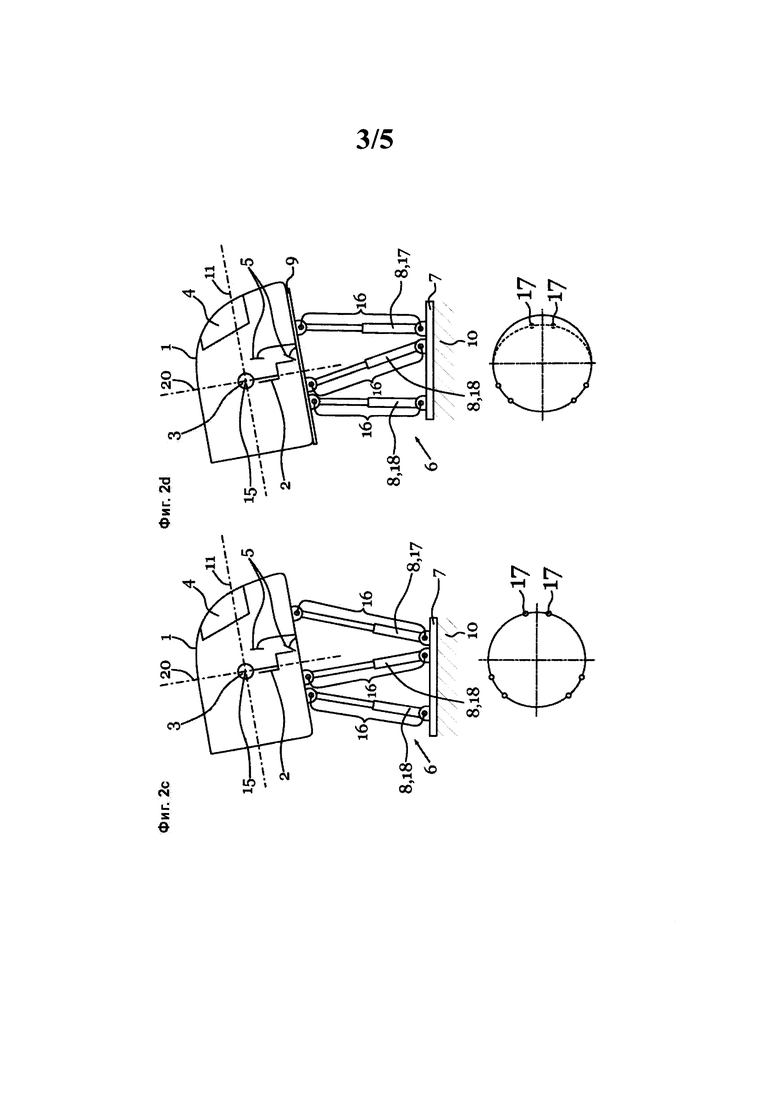
Фиг. 2с представляет схематический вид сбоку другого варианта реализации изобретения авиационного тренажера, при этом элементы и признаки на Фиг. 2с по существу соответствуют признакам на Фиг. 2а и 2b. В данном варианте реализации изобретения, представленном на Фиг. 2с, передние устройства линейного перемещения 17 имеют более длинную конструкцию, чем задние устройства линейного перемещения 18. В частности, это означает, что максимальные длины передних устройств линейного перемещения 17 больше, чем максимальные длины задних устройств линейного перемещения 18. Таким же образом можно увеличить и свободу движения вверх относительно оси тангажа.
Фиг. 2d представляет схематический вид сбоку другого варианта реализации авиационного тренажера в соответствии с данным изобретением, в котором компоненты по существу соответствуют компонентам предшествующих вариантов реализации изобретения. В данном варианте реализации изобретения все устройства линейного перемещения 8 имеют одинаковую максимальную длину. Однако угол установки передних устройств линейного перемещения 17 более крут, чем угол установки задних устройств линейного перемещения 17. Таким же образом, можно увеличить и свободу движения вверх. В частности, как показано ниже в наклонном виде на схематической иллюстрации точек атаки для устройств линейного перемещения 8, точки атаки для передних устройств линейного перемещения продвинуты ближе к центру для достижения более крутого угла установки.
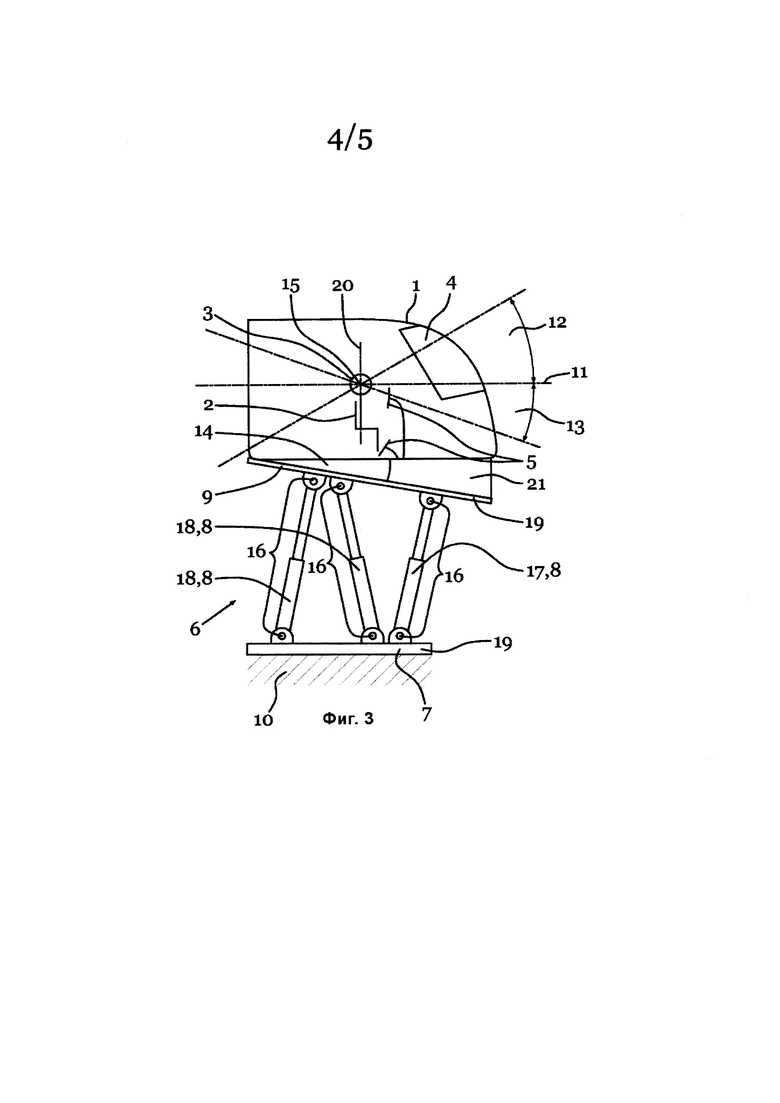
Фиг. 3 представляет схематический вид сбоку варианта реализации изобретения на Фиг. 2а, при этом кабина тренажера 1 находится в ее основном положении. Компоненты и признаки авиационного тренажера, показанного на Фиг. 3, по существу, соответствуют признакам предшествующих вариантов реализации изобретения. Продольная ось 11 в данном изображении по существу проходит горизонтально. Параллельное кинематическое устройство 6 находится в положении, отклоняющемся от параллельного кинематического основного положения. В частности, несущий элемент 9 наклонен под заданным углом, в частности, под углом отклонения 14.
В результате этой конфигурации кабина тренажера 1 или продольная ось 11 может быть отклонена вверх от по существу горизонтального направления на первый угол тангажа 12 и отклонена вниз под углом второго угла тангажа 13, причем первый угол тангажа 12 предпочтительно больше, чем 25°. В частности, значение первого угла тангажа 12 больше, чем значение второго угла тангажа 13, что дает асимметричную свободу движения для кабины тренажера с учетом наклона относительно оси тангажа 15.
Там, где это применимо, предусмотрена поворотная пластина или поворотная панель 19. Кабина тренажера 1 может быть повернута относительно пола 10 посредством этой поворотной пластины или поворотной панели. Например, поворотная пластина 19 может быть предусмотрена между кабиной тренажера 1 и несущим элементом 9. Там, где это применимо, поворотная пластина 19 предусмотрена между полом 10 и основанием 7.
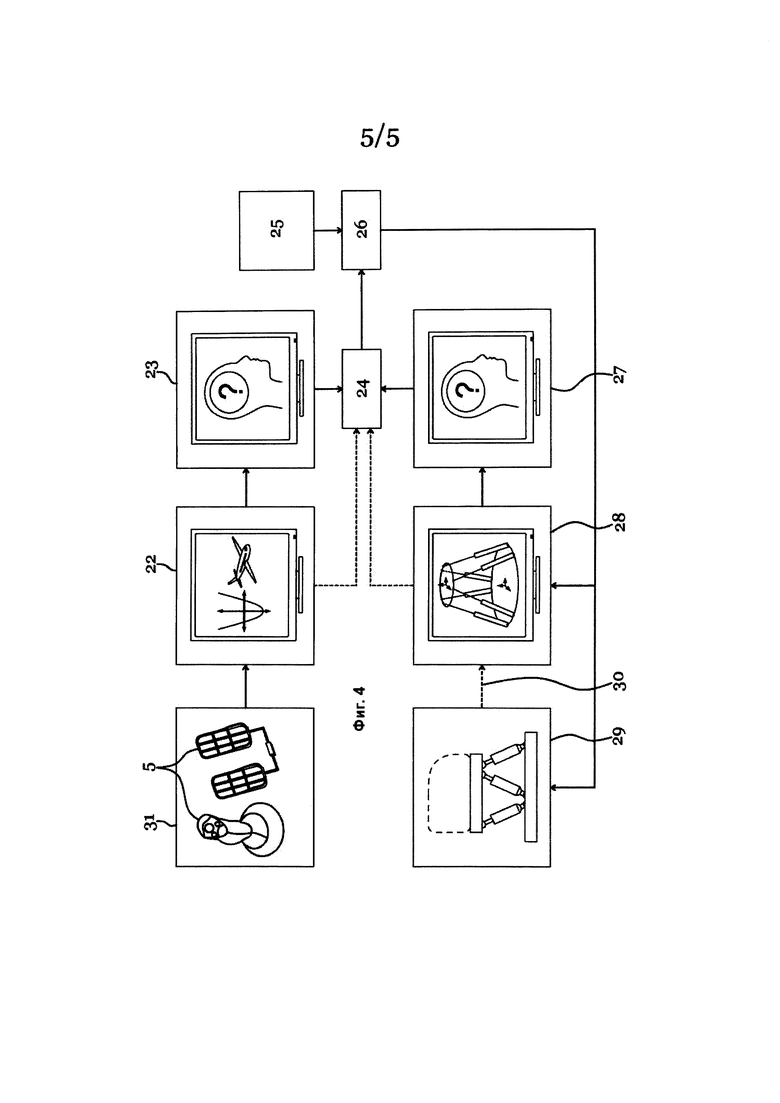
Фиг. 4 представляет схематическую структурную конструкцию регулирующей модели в схеме регулирования для регулирования и/или управления авиационным тренажером, причем схема регулирования предпочтительно является по меньшей мере частью устройства обработки данных и, в частности, является устройством управления и/или регулирующим устройством, которое предпочтительно представлено в компьютерно-реализованном исполнении. Регулирующая модель или регулирующая схема подходят для регулирования авиационного тренажера в реальном времени, в частности, так называемого "полнополетного тренажера" или управления движением тренажера. Этот тип регулирующей модели может использоваться для авиационного тренажера в соответствии с данными вариантами реализации изобретения.
Однако, регулирующая модель также может использоваться для управления и/или регулирования других имитаторов движения, например, одноплечевых центрифуг, двухплечевых центрифуг с подвижной тележкой, одноплечевых центрифуг с подвижной тележкой или других имитаторов движения. Для имитирования любых транспортных средств, например автотранспортного средства, корабля, вертолета и т.д., модель полета может быть заменена моделью, соответствующей транспортному средству, которое должно быть сымитировано во всех вариантах реализации изобретения. Чтобы имитировать различные типы самолетов или специальный тип самолета, модель полета может соответствовать соответствующему самолету, который должен быть имитирован, или настроена на него.
Фильтр движения или регулирующая модель могут использоваться для любых авиационных тренажеров или имитаторов движения посредством изменения имитатора движения или компонентов авиационного тренажера 29 и кинематической модели 28 имитатора, подлежащей регулированию. Предпочтительно корректируют также и ограничения 25.
Регулирующая модель предпочтительно включает управляющие входные данные 31, которые генерируются, в частности, элементом управления 5 или элементами управления 5, модель полета 22, модель восприятия 23, целевую функцию 24, алгоритм оптимального управления или алгоритм оптимального регулирования 26, ограничения 25, модель восприятия 27 и кинематическую модель имитатора 28. Компоненты авиационного тренажера 29, подлежащие управлению или регулировке, связаны с регулирующей схемой. Одно из преимуществ этой регулирующей модели, которая также упоминается как фильтр движения, заключается в том, что отклонение между реальным движением и имитируемым движением, соответствующим целевой функции, сводится к минимуму. Основываясь на управляющих данных 31 для оператора, модель полета 22 вычисляет движения, действующие на оператора, которые далее обрабатываются в модели восприятия 23 для расчета движений, воспринимаемых пилотом. Движения, подлежащие имитированию, преобразуются в соответствующие параметры для авиационного тренажера и, в частности, передаются в кинематическую модель имитатора 28, при этом выходные данные, которые в свою очередь дополнительно обрабатываются моделью восприятия 27, в движении воспринимаются или подлежат восприятию оператором. Разница между выходными данными двух моделей восприятия 23 и 27 оптимизирована или сведена к минимуму, так что фильтр движения или регулирующая модель в своей полноте создают оптимальное имитирование. Рабочее пространство имитатора можно быть оптимально использовано посредством активного рассмотрения ограничений 25. Как результат, интерпретация, основанная на "наихудших сценариях", больше абсолютно не требуется. Например, ограничения представляют собой кинематические пределы подвижной платформы или авиационного тренажера.
Там, где это применимо, две модели восприятия 23, 27 идентичны во всех вариантах реализации изобретения.
Там, где это применимо, фактически возникающие данные движении для авиационного тренажера возвращаются в схему регулирования посредством обратной связи 30. Там, где это применимо, модели восприятия также могут быть опущены, так что выходные данные для модели полета 22 и/или кинематической модели имитатора 28 подаются непосредственно к целевой функции 24. Таким образом, пунктирные линии соответствуют альтернативным вариантам реализации изобретения, которые могут быть предусмотрены в дополнение к соответствующим сплошным линиям или в качестве замены.
Регулирующая модель, раскрытая на Фиг. 4 и в дальнейшем описании, допускает регулирование авиационных тренажеров в режиме реального времени, в котором улучшается или активируется точная имитация по ощущениям.
Изобретение определяется, в частности, признаками в формуле изобретения и не ограничивается приведенными примерными вариантами реализации изобретения. В частности, комбинации признаков, раскрытых в вариантах реализации изобретения, также являются частью изобретения. Например, могут быть использованы параллельные кинематические устройства, устройства линейного перемещения, которые аналогичны или конструктивно идентичны по исполнению. В частности, минимальные длины и максимальные длины всех устройств линейного перемещения могут быть примерно одинаковыми. В данном варианте реализации изобретения также могут быть установлены передние устройства линейного перемещения, тем самым увеличивая свободу движения вверх относительно оси тангажа. Кроме того, положение кабины тренажера может быть наклонным относительно несущего элемента и/или положение всего параллельного кинематического устройства может быть наклонным. Наклонное положение частей параллельных кинематических устройств в сочетании с удлиненными передними устройствами линейного перемещения потенциально также отражает идею изобретения.
Ниже описана примерная последовательность имитации, чтобы дополнительно показать возможное применение:
Например, первоначальная ситуация связана с крейсерским полетом гражданского авиалайнера. На первом этапе скорость полета в имитации может быть недопустимо уменьшена по разным причинам, например, атмосферные возмущения, дефекты датчиков, ошибка пилота и т.д. Как следствие, угол атаки должен быть увеличен, так что спуск самолета может быть предотвращен. Если эта ситуация теперь приводит к полномасштабному срыву потока, так называемому срыву, могут возникнуть углы атаки, например, превышающие 25°. Этот угол атаки достаточно точно воспроизводится авиационным тренажером во время имитации, чтобы добиться реалистичной имитации. Для того, чтобы тренаж был целесообразным, предпочтительно, чтобы срыв был сымитирован на около 10° выше критического угла атаки. Как следствие, авиационный тренажер должен быть способен реализовать или имитировать углы атаки, превышающие 25°, и предпочтительно в пределах от около 30° до 35°. В ответ на срыв пилот теперь будет направлять самолет вниз по типу ныряния, например, от около -15° до -20°, так что оба показателя, как соотношение потоков, так и скорость полета, снова возвращаются в нормальный диапазон. Затем самолет перехватывается целенаправленным и осторожным образом. Например, во время этого маневра встречаются максимальные углы атаки относительно оси тангажа от +30° до +35° и от -15° до -20°. Точное воспроизведение угла атаки часто не встречается на практике, поскольку другие ускорения действуют на человека, например уменьшение скорости, т.е. задержка, или увеличение скорости, т.е. ускорение, имитируются посредством наклона положения кабины тренажера. Например, эти наклонные положения лежат в пределах не более 3-5°, которые вычитаются из или добавляются к имитируемому полетному положению.
Там, где это применимо, авиационный тренажер во всех вариантах реализации изобретения сконструирован таким образом, что тренажер имеет максимальное положение тангажа, в котором продольная ось, начиная от горизонтального направления, направлена вверх или вниз под углом первого или второго угла тангажа внутри диапазона кинематических возможностей параллельного кинематического устройства, при необходимости выдерживая контрольные резервы. Например, кинематические возможности ограничены конструктивным исполнением параллельного кинематического устройства. Однако эти кинематические возможности используются только частично в авиационных тренажерах, поэтому и сохраняется контрольный резерв.
Элементы управления предусмотрены в кабине тренажера для управления авиационным тренажером. Например, эти элементы управления моделируются после имитации управления летательным аппаратом. Во всех вариантах реализации изобретения кабина тренажера может заключать в себе кабину, соответствующую кабине летательного аппарата, которая должна быть сымитирована.
В тренажере элементы управления работают для передачи управляющих сигналов на устройство обработки данных, в частности на устройство управления и/или регулирующее устройство. Устройство обработки данных, устройство управления и/или регулирующее устройство могут содержать один или более компьютеров с программным управлением и быть спроектированы по меньшей мере частично в соответствии с Фиг. 4. В частности, сохраняется математическая модель полета, выполненная компьютером, которая соответствует модели виртуального движения летательного аппарата для имитирования. Данные управления имитацией, например, данные элементов управления или потенциально также возмущающих воздействий, таких как воздействие окружающей среды или целевые, искусственные возмущающие воздействия, передаются на эту выполненную на компьютере модель полета, где реакции модели на данные управления вычисляются, предпочтительно в режиме реального времени. Например, данные модели полета включают данные об ускорении, скорости и/или положении, которые будут влиять на оператора в имитируемой среде, но также и в реальности.
Во время имитации чрезвычайно важно, чтобы параметры ускорения или параметры положения были сымитированы с максимально возможной точностью, насколько это возможно. С этой целью потенциально реализуемая компьютером модель восприятия также может храниться в устройстве обработки данных. Эта модель включает параметры о том, как конкретные состояния ускорения или изменения воспринимаются оператором. При необходимости управляющие данные элементов управления передаются, таким образом, в модель полета и в модель восприятия, и там предпочтительно обрабатываются в режиме реального времени, чтобы, с точки зрения восприятия, осуществлять точный контроль или управление тренажером. Это управление предпочтительно представляет собой управление в реальном времени, которое, в частности, также рассматривает данные о кинематическом ограничении параллельного кинематического устройства и авиационного тренажера. Выходные данные посредством регулирующего устройства, предпочтительно направляются в параллельное кинематическое устройство для управления или регулирования его перемещения.
Кроме того, может быть сохранена потенциально реализуемая компьютером модель кинематики тренажера и/или характеристики движения параллельного кинематического устройства. Данные управления передаются на эту модель, чтобы имитировать движение тренажера в реализуемой компьютером модели. Имитирование параллельного кинематического устройства и выходных переменных для этого имитирования также может быть передано на реализуемую компьютером модель восприятия. Чтобы оптимизировать имитацию, разность между выходными данными модели восприятия, моделью полета и моделью восприятия из модели тренажера впоследствии может быть оптимизирована или минимизирована. Затем оптимизированные данные управления используются для управления реальным параллельным кинематическим устройством. Там, где это применимо, реальные данные авиационного тренажера возвращаются, в частности возвращаются данные о местоположении или данные ускорения, при этом они возвращаются в регулирующее устройство посредством модели восприятия. Параметры модели восприятия могут быть индивидуально настроены для данного оператора. Две модели восприятия могут быть идентичными по исполнению.
В примерной регулирующей модели, например, описанной на Фиг. 4, данные управления имитатором элементов управления, таким образом, отправляются в потенциально реализуемую компьютеом модель полета, по которой затем вычисляются рабочие реакции имитируемого летательного аппарата. Например, выходные переменные представляют собой данные о местоположении или ускорении. Они передаются в потенциально реализуемую компьютером модель восприятия с тем, чтобы получить параметры, соответствующие восприятиям оператора. Схема регулирования предпочтительно также включает потенциально реализуемую компьютером модель кинематики тренажера, выходные данные которой в свою очередь передаются в потенциально реализуемую компьютером модель восприятия, выходные данные которой по существу соответствуют данным восприятия, генерируемым имитатором кинематики. Различие между данными восприятия из управляющих входов и данных восприятия от кинематики тренажера предпочтительно минимизируется. Кроме того, эти данные представляют собой входную переменную для регулирующей схемы. Регулирующая схема соединена с параллельным кинематическим устройством для управления параллельным кинематическим устройством. Цель алгоритма в первую очередь заключается не только в минимизации физического отклонения при движении, но скорее в минимизации отклонения восприятия при соблюдении необходимых ограничений, при котором физические отклонения в движениях также могут быть сведены к минимуму. Рабочее пространство тренажера или параллельного кинематического устройства может быть оптимально использовано при активном рассмотрении ограничений. Конфигурация, основанная на "наихудшем сценарии", больше не требуется. Вместо воспроизведения физического движения происходит дублирование ощущения движения, что приводит к более реалистичному результату имитирования. Ощущение - субъективный критерий, означающий, что каждый человек воспринимает движение немного по-другому. Модель восприятия отражает основную характеристику человеческого восприятия и может быть адаптирована к индивидуальному восприятию посредством индивидуальной параметризации. Там, где это применимо, системный оператор имеет возможность реагировать на обратную связь с оператором или обратную связь с пилотом даже во время имитирования, так что поведение системы может быть соответствующим образом скорректировано. Фильтр перемещений не привязан к конкретной кинематической конструкции подвижной платформы. Корректировки позволяют также применять алгоритм к другим платформам, например, одноплечевым центрифугам или многоплечевым центрифугам. В отличие от автономного режима, пилот может активно управлять самолетом во время использования данного регулирующего устройства в режиме реального времени, в частности регулирующего устройства согласно Фиг. 4, в которой объясняется термин "режим с обратной связью", обычно используемый в имитировании движения. Управляющие входные данные оператора используются для вычисления опорной траектории, но последняя является единственной потенциально известной вплоть до текущего времени, в которой будущее движение может быть предсказано, если это необходимо. По этому параметру траектория подвижной платформы может быть рассчитана в реальном времени. Одним из преимуществ данного регулирующего устройства, в частности регулирующего устройства согласно Фиг. 4, является то, что оно решает эти два требования: с одной стороны, возможность решить задачу оптимизации в реальном времени, и с другой, возможность оптимально следовать неизвестному опорному движению. Способ реального времени ориентирован на идею "управление, основанное на прогнозирующей модели" (с английского: прогнозируемо-управленческая модель, ПУМ), способ регулирования, согласно которому вычисляют оптимальные управляющие переменные, используя модель процесса и принимая в расчет ограничения. Термин ПУМ здесь не описывает какой-либо специальный управляющий алгоритм, а обозначает класс поддерживаемых моделью способов регулирования, которые разрешают задачу динамической оптимизации по перемещаемому горизонту в реальном времени. Модель процесса используется для прогнозирования последствий текущих и будущих управляющих переменных и оптимизации их в соответствии с желаемой целевой функцией.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПИЛОТАЖНЫЙ ТРЕНАЖЕР НА ОСНОВЕ ЦЕНТРИФУГИ | 2012 |
|
RU2591108C2 |
| Способ моделирования динамики полета летательного аппарата | 2024 |
|
RU2820152C1 |
| ИМИТАТОР ВИЗУАЛЬНОЙ ОБСТАНОВКИ АВИАЦИОННОГО ТРЕНАЖЕРА | 2002 |
|
RU2230370C2 |
| АДАПТИВНЫЙ ИМИТАТОР ЗАГРУЗКИ НА РЫЧАГАХ УПРАВЛЕНИЯ АВИАЦИОННОГО ТРЕНАЖЕРА | 2002 |
|
RU2231127C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЯМИ ПИЛОТАЖНОГО ТРЕНАЖЕРА И ПИЛОТАЖНЫЙ ТРЕНАЖЕР, РЕАЛИЗУЮЩИЙ ТАКОЙ СПОСОБ | 2006 |
|
RU2425409C2 |
| Устройство имитации условий движения транспортного средства для тренажера | 1984 |
|
SU1365109A1 |
| ТРЕНАЖЕР АВИАЦИОННЫЙ | 2003 |
|
RU2324982C2 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ЛЕТЧИКОВ ПИЛОТИРОВАНИЮ УДАРНОГО ВЕРТОЛЕТА И ПРИМЕНЕНИЮ АВИАЦИОННЫХ СРЕДСТВ ПОРАЖЕНИЯ | 2008 |
|
RU2367026C1 |
| Тренажер авиационный на базе беспилотного летательного аппарата | 2023 |
|
RU2820357C1 |
| ТРЕНАЖЕР ВОЗДУШНОГО БОЯ | 2005 |
|
RU2297674C2 |
Изобретение относится к авиационному тренажеру, а также к способу имитации полета в соответствии с ограничительной частью независимых пунктов формулы изобретения. Комплексный авиационный тренажер содержит кабину тренажера, параллельное кинематическое устройство. Кабина тренажера содержит сиденье для оператора, устройство отображения изображения для отображения имитируемой среды и элементы управления. Параллельное кинематическое устройство содержит основание, несущий элемент и устройства линейного перемещения. Несущий элемент соединен с основанием устройствами линейного перемещения. При этом основание прикреплено к полу, а несущий элемент - к кабине тренажера, так что кабина тренажера расположена на параллельном кинематическом устройстве. Параллельное кинематическое устройство имеет параллельное кинематическое основное положение, в котором основание и несущий элемент по существу проходят параллельно. Параллельное кинематическое устройство расположено в положении, отклоняющемся от параллельного кинематического основного положения, когда кабина тренажера расположена в своем основном положении. Повышается реалистичность имитации полета при эксплуатации. 2 н. и 23 з.п. ф-лы, 7 ил.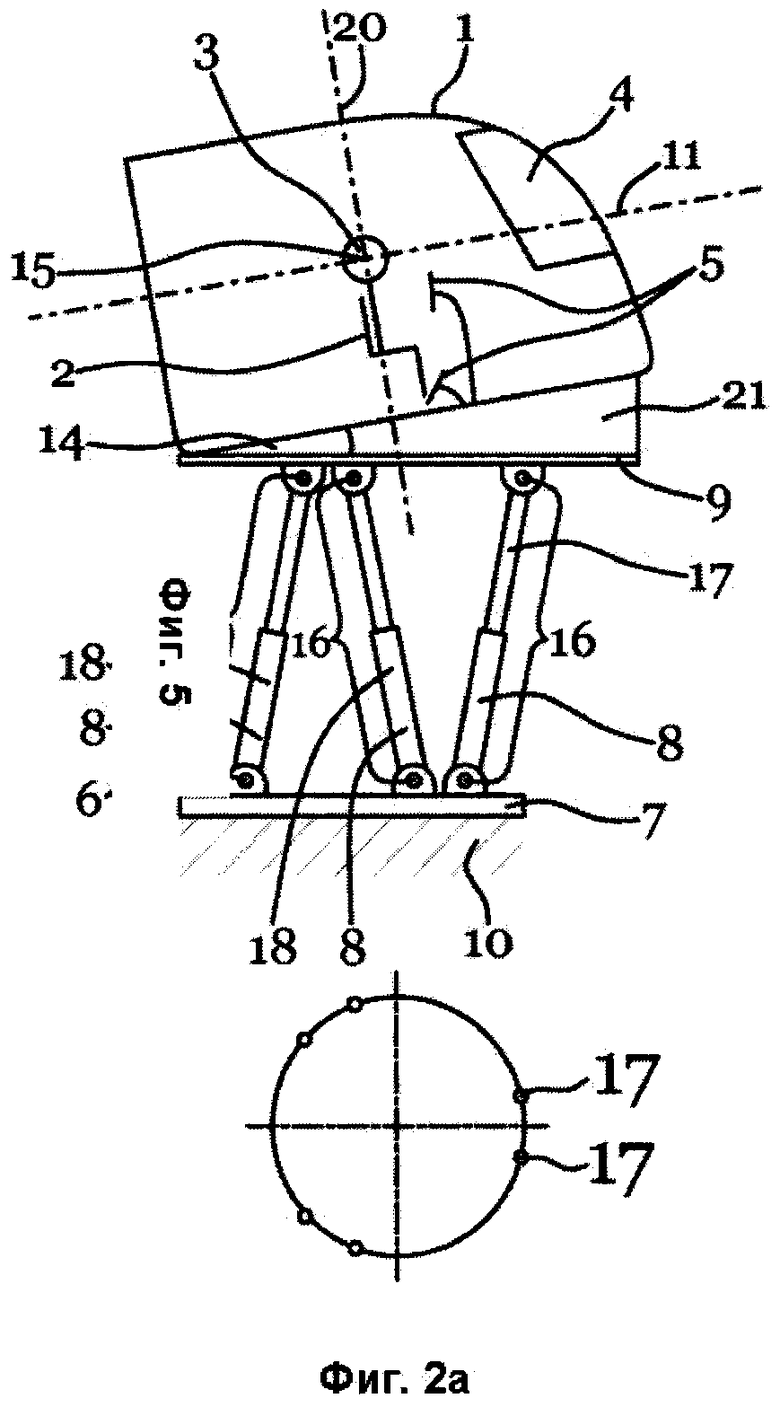
1. Комплексный авиационный тренажер, содержащий:
- кабину тренажера (1), при этом кабина тренажера содержит сиденье (2) для оператора (3), устройство отображения изображения (4) для отображения имитируемой среды и по меньшей мере один элемент управления (5) для генерирования данных управления имитацией и, в частности, для управления имитируемым воздушным судном и для влияния оператора (3) на имитирование,
- параллельное кинематическое устройство (6), содержащее основание (7), несущий элемент (9) и несколько устройств линейного перемещения (8), при этом несущий элемент (9) соединен с основанием (7) не менее чем тремя, предпочтительно шестью, устройствами линейного перемещения (8), и при этом основание (7) прикреплено или присоединено к полу (10), а несущий элемент (9) - к кабине тренажера (1), так что кабина тренажера расположена на параллельном кинематическом устройстве (6),
при этом кабина тренажера (1) имеет основное положение, по существу соответствующее установившемуся прямолинейному полету имитируемого летательного аппарата, и в котором продольная ось (11) имитируемого летательного аппарата или оператора (3) по существу проходит горизонтально,
при этом кабина тренажера (1) имеет максимальное положение положительного наклона, в котором продольная ось (11), переходя от горизонтального направления, наклонена вверх, насколько это возможно, на первый угол тангажа (12) в пределах диапазона кинематических возможностей параллельного кинематического устройства (6), соблюдая любые условия управления, которые могут быть предусмотрены, и в результате оператор (3) отклоняется назад,
при этом кабина тренажера (1) находится в положении максимального отрицательного наклона, в котором продольная ось (11), переходя от горизонтального направления, наклоняется вниз на второй угол тангажа (13) в пределах диапазона кинематических возможностей параллельного кинематического устройства (6), соблюдая любые условия управления, которые могут быть предусмотрены, и в результате оператор (3) наклоняется вперед, отличающийся тем, что
- значение первого угла тангажа (12) больше чем 25°,
- параллельное кинематическое устройство (6) имеет параллельное кинематическое основное положение, в котором основание (7) и несущий элемент (9) по существу проходят параллельно, и
- параллельное кинематическое устройство (6) расположено в положении, отклоняющемся от параллельного кинематического основного положения, когда кабина тренажера (1) расположена в своем основном положении.
2. Авиационный тренажер по п. 1, отличающийся тем, что значение первого угла тангажа (12) больше, чем значение второго угла тангажа (13), или что значение первого угла тангажа (12) больше, чем значение второго угла тангажа (13) на угол отклонения (14).
3. Авиационный тренажер по п. 1 или 2, отличающийся тем, что наклон кабины тренажера (1) относительно оси тангажа (15) или относительно оси, параллельной оси тангажа (15) между максимальным отрицательным положением тангажа и максимальным положительным положением тангажа, происходит исключительно посредством приведения в действие параллельного кинематического устройства (6).
4. Авиационный тренажер по любому из пп. 1-3, отличающийся тем, что линейные устройства перемещения (8) выполнены в виде устройств линейного перемещения (8) с переменной длиной (16), которую можно регулировать или управлять ею, причем длина (16) устройств линейного перемещения (8) лежит между или в пределах минимальной длины и максимальной длины, так что несущий элемент (9) может быть повернут относительно основания (7) по меньшей мере в двух осях посредством изменения длины устройств линейного перемещения (8) и, потенциально, имеет три вращательные степени свободы и три поступательные степени свободы.
5. Авиационный тренажер по любому из пп. 1-4, отличающийся тем, что устройства линейного перемещения (8) расположены попарно, причем два устройства линейного перемещения (8), состоящие из пары устройств линейного перемещения, наклонены относительно друг друга, тем самым образуя, в частности, гексапод.
6. Авиационный тренажер по любому из пп. 1-5, отличающийся тем, что параллельное кинематическое устройство (6) имеет параллельное кинематическое основное положение, в котором основание (7) и несущий элемент (9) по существу проходят параллельно, причем основание (7) наклонено относительно несущего элемента (9) относительно оси тангажа (15) или относительно оси, параллельной оси тангажа (15), когда кабина тренажера (1) расположена в своем основном положении.
7. Авиационный тренажер по любому из пп. 1-6, отличающийся тем, что параллельное кинематическое устройство (6) имеет параллельное кинематическое основное положение, в котором основание (7) и несущий элемент (9) по существу проходят параллельно, при этом продольная ось (11) направлена вверх под положительным углом отклонения (14), а кабина тренажера (1) расположена в положении, отклоняющемся от его основного положения.
8. Авиационный тренажер по любому из пп. 1-7, отличающийся тем, что
- основание (7) направлено вверх под положительным углом отклонения (14) относительно горизонтальной плоскости,
- а продольная ось (11) направлена вверх под положительным углом отклонения (14) относительно направления несущего элемента (9),
- и основание (7) наклонено вверх относительно горизонтальной плоскости, а вместе с ним продольная ось (11) наклонена вверх относительно направления несущего элемента (9) под положительным углом отклонения (14),
при этом угол отклонения (14) указывается в плоскости, нормальной к оси тангажа (15).
9. Авиационный тренажер по любому из пп. 1-8, отличающийся тем, что клиновидное устройство (21), имеющее вид клина или выступающее подобно клину и расположенное между основанием (7) и полом (10), выполнено с возможностью наклона основания (7) относительно горизонтальной плоскости.
10. Авиационный тренажер по любому из пп. 1-9, отличающийся тем, что клиновидное устройство (16), имеющее вид клина или действующее подобно клину и расположенное между кабиной тренажера (1) и несущим элементом (9), выполнено с возможностью наклона продольной оси (11) относительно направления несущего элемента (9).
11. Авиационный тренажер по любому из пп. 9 и 10, отличающийся тем, что клиновидное устройство (16) представляет собой жесткое клиновидное устройство, угол клина которого остается неизменным во время имитирования.
12. Авиационный тренажер по любому из пп. 1-11, отличающийся тем, что все устройства линейного перемещения (8) по существу имеют одинаковую минимальную и максимальную длину и, в частности, конструктивно идентичны по исполнению, тем самым, в частности, образуя симметричное параллельное кинематическое устройство (6).
13. Авиационный тренажер по любому из пп. 1-11, отличающийся тем, что переднее устройство линейного перемещения (8) или пара передних устройств линейного перемещения, как видно вдоль направления наблюдения оператора (3), имеют большую максимальную длину, чем заднее устройство линейного перемещения (8) или пара задних устройств линейного перемещения, тем самым образуя асимметричное параллельное кинематическое устройство (6).
14. Авиационный тренажер по одному из пп. 1-13, отличающийся тем, что в параллельном кинематическом основном положении угол установки переднего устройства линейного перемещения (8, 17) или пары передних устройств линейного перемещения, как видно в направлении наблюдения оператора (3), будет более крутым, чем угол установки заднего устройства линейного перемещения (8, 18) или пары задних устройств линейного перемещения, тем самым образуя симметричное параллельное кинематическое устройство (6).
15. Авиационный тренажер по любому из пп. 1-14, отличающийся тем, что второй угол тангажа (13) имеет размер от -10° до -25°,
что второй угол тангажа (13) имеет размер от -10° до 22°,
или что второй угол тангажа (13) имеет размер от -19° до -21°.
16. Авиационный тренажер по любому из пп. 1-15, отличающийся тем, что первый угол тангажа (12) имеет размер от 25° до 35°,
что первый угол тангажа (12) имеет размер от 28° до 35°,
что первый угол тангажа (12) имеет размер от 29° до 35°,
что первый угол тангажа (12) имеет размер от 30° до 35°,
что первый угол тангажа (12) имеет размер от 32° до 35°,
или что первый угол тангажа (12) имеет размер от 29° до 31°.
17. Авиационный тренажер по любому из пп. 1-16, отличающийся тем, что угол отклонения (14) имеет размер от около 2° до 20°, от около 2° до 12°, от около 3° до 10°, от около 4° до 8° или около 5°.
18. Авиационный тренажер по любому из пп. 1-17, отличающийся тем, что между полом (10) и основанием (7) или между несущим элементом (9) и кабиной тренажера (1) предусмотрена поворотная пластина (19) или поворотная панель (19), так что кабина тренажера (1) может поворачиваться вокруг вертикальной оси, в частности вокруг оси рыскания (20).
19. Авиационный тренажер по любому из пп. 1-18, отличающийся тем, что предусмотрено управляющее устройство для обработки данных управления имитацией и управления параллельным кинематическим устройством (6) и выполнено с возможностью использования для перевода кабины тренажера (1) из положения максимально положительного тангажа в положение максимального отрицательно тангажа, при этом максимально положительное положение тангажа и максимально отрицательное положение тангажа определяют свободу движения для кабины тренажера (1) в отношении тангажа.
20. Способ имитации полета на комплексном авиационном тренажере по любому из предшествующих пунктов, включающий:
- приведение в действие параллельного кинематического устройства (6), так чтобы кабина тренажера (1) находилась в своем основном положении,
- затем приведение в действие параллельного кинематического устройства (6) так, чтобы кабина тренажера (1) была отклонена назад от своего основного положения относительно оси (15) тангажа или относительно оси, параллельной оси тангажа, с положительным углом тангажа более чем 25°.
21. Способ по п. 20, отличающийся тем, что установившийся прямолинейный полет имитируется при первом приведении в действие параллельного кинематического устройства (6), которое приводит кабину тренажера (1) в ее основное положение,
а развившийся срыв моделируется вторым приведением в действие параллельного кинематического устройства (6), которое наклоняет кабину тренажера (1) назад от ее основного положения относительно оси тангажа (15) или относительно оси, параллельной оси тангажа (15), на положительный угол тангажа больший чем 25°.
22. Способ по п. 20 или 21, отличающийся тем, что кабина тренажера (1) отклоняется назад от основного положения относительно оси тангажа (15) или относительно оси, параллельной оси тангажа (15), на положительный угол тангажа больший чем 25°, исключительно путем приведения в действие параллельного кинематического устройства (6).
23. Способ по любому из пп. 20-22, отличающийся тем, что положительный угол тангажа составляет 26-35° или более.
24. Способ по любому из пп. 20-23, отличающийся тем, что установившийся прямолинейный полет имитируется при первом приведении в действие параллельного кинематического устройства (6), которое приводит кабину тренажера (1) в ее основное положение, а срыв потока или развившийся срыв имитируется при втором приведении в действие параллельного кинематического устройства (6), которое наклоняет кабину тренажера (1) назад от ее основного положения относительно оси тангажа (15) или относительно оси, параллельной оси тангажа (15), на положительный угол тангажа больший чем 25°, причем сымитированная полетная ситуация при этом отличается от наихудшего сценария, нарисованного для интерпретации свободы движения или характеристик движения обычного тренажера.
25. Способ по любому из пп. 20-24, отличающийся тем, что установившийся прямолинейный полет имитируют при первом приведении в действие параллельного кинематического устройства (6), которое приводит кабину (1) тренажера в ее основное положение, при этом имитируемая скорость ниже, чем максимальная скорость имитируемого летательного аппарата, и, в частности, более чем на 10% ниже максимальной скорости имитируемого летательного аппарата,
а срыв потока или развившийся срыв имитируют при втором приведении в действие параллельного кинематического устройства (6), которое наклоняет кабину тренажера (1) назад от ее основного положения относительно оси тангажа (15) или относительно оси, параллельной оси тангажа (15), на положительный угол тангажа больший чем 25°, при этом имитируемая скорость во время срыва потока ниже, чем максимальная скорость имитируемого летательного аппарата, и, в частности, более чем на 10% ниже максимальной скорости имитируемого летательного аппарата и, следовательно, отличается от наихудшего сценария, нарисованного для интерпретации свободы движения или характеристик движения обычного тренажера.
| US 5975907 A, 02.11.1999 | |||
| Шпиндельная головка к станкам для зачистки концов труб | 1950 |
|
SU89744A1 |
| Способ получения изопрена на железооксидных катализаторах в адиабатическом реакторе | 2018 |
|
RU2687491C1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |

