Изобретение относится к способам движения транспортных средств и космических кораблей.
Известны способы движения объектов (космических кораблей) в пространстве с использованием вращающихся роторов гироскопов, например с целью управления угловым положением объектов при их ориентации [1, 2]. Согласно этим способам к осям подвеса силового гироскопа (или системы гироскопов), связанного с корпусом объекта, прикладывают регулирующие моменты сил  направленные перпендикулярно оси вращения ротора гироскопа. В результате гироскоп действует на корпус объекта гироскопическим моментом реакции, вызывающим вращение объекта относительно его центра масс, остающегося при этом неподвижным. Движение центра масс объекта обеспечивают путем воздействия на объект внешнего импульса в направлении движения (например, импульса, создаваемого с помощью реактивных двигателей).
направленные перпендикулярно оси вращения ротора гироскопа. В результате гироскоп действует на корпус объекта гироскопическим моментом реакции, вызывающим вращение объекта относительно его центра масс, остающегося при этом неподвижным. Движение центра масс объекта обеспечивают путем воздействия на объект внешнего импульса в направлении движения (например, импульса, создаваемого с помощью реактивных двигателей).
Согласно указанным способам для движения центра масс объекта не требуется вращение ротора. В этом случае при движении центра масс объекта невозможно использовать безынерционность прецессии вращающегося ротора, а также накопленную в роторе энергию вращательного движения, что является недостатком.
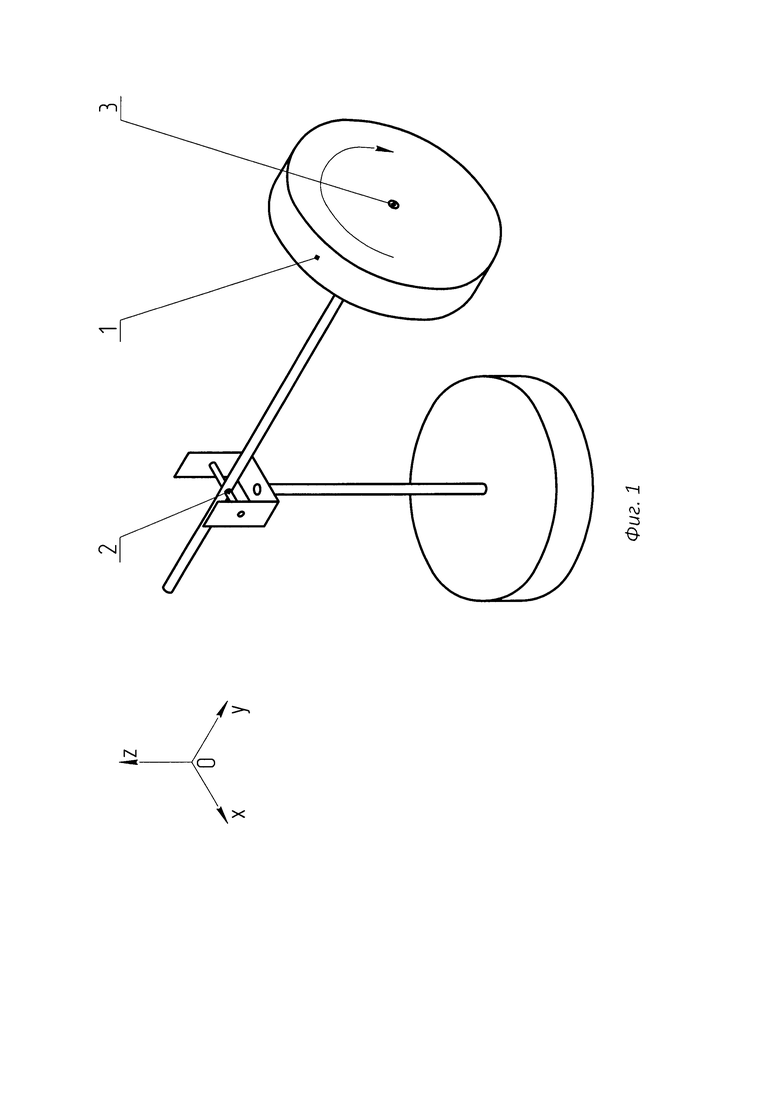
Наиболее близким по технической сущности (прототипом) является следующий способ, позволяющий осуществить движение центра масс объекта в пространстве с использованием вращающегося ротора [3]. Цилиндрический ротор 1 (см. фиг. 1) раскручивают до угловой скорости  (далее в тексте - «собственная угловая скорость») вокруг горизонтальной материальной оси, являющейся осью цилиндра (далее в тексте - ось ротора) и шарнирно закрепленной в точке 2. Сила веса ротора, приложенная центру масс 3 вращающегося ротора, порождает момент силы относительно точки 2. В результате изменяется вектор момента импульса ротора, что вызывает прецессию (вращение) оси ротора в горизонтальной плоскости вокруг точки 2 с угловой скоростью прецессии
(далее в тексте - «собственная угловая скорость») вокруг горизонтальной материальной оси, являющейся осью цилиндра (далее в тексте - ось ротора) и шарнирно закрепленной в точке 2. Сила веса ротора, приложенная центру масс 3 вращающегося ротора, порождает момент силы относительно точки 2. В результате изменяется вектор момента импульса ротора, что вызывает прецессию (вращение) оси ротора в горизонтальной плоскости вокруг точки 2 с угловой скоростью прецессии 
Объект (ротор) движется в пространстве вместе с осью ротора в направлении, перпендикулярном оси ротора и направлению приложенной силы (в данном случае - силы веса ротора). Таким образом, согласно данному способу движение центра масс объекта (ротора) происходит в результате прецессии оси вращающегося ротора.
Прецессия на фиг. 1 происходит в горизонтальной плоскости, если выполнено условие [3]:
где w - модуль вектора  , a W - модуль вектора
, a W - модуль вектора 
Условие (1) здесь и для целей настоящего изобретения означает, что собственная угловая скорость w вращения ротора превосходит угловую скорость прецессии W не менее, чем на 2 десятичных порядка.
Если выполнено условие (1), величину угловой скорости прецессии W вычисляют по формуле [3]:

где F - модуль вектора силы, приложенной к центру масс ротора перпендикулярно его оси (в данном случае F равно весу Р ротора);
R - расстояние от центра масс N=3 ротора до неподвижной точки 2 (см. фиг. 1);
 - момент инерции ротора относительно оси ротора;
- момент инерции ротора относительно оси ротора;
w - модуль вектора  (собственная угловая скорость ротора);
(собственная угловая скорость ротора);
М - модуль вектора момента силы, вызывающего прецессию.
Тогда скорость движения v центра масс ротора:

Как известно [3], прецессия оси вращающегося ротора происходит безынерционно, то есть при возникновении момента силы  вызывающего прецессию, угловая скорость прецессии мгновенно изменяется от нуля до величины W, определяемой из (2). Поскольку в результате прецессии ось ротора передвигается вместе с ротором, скорость передвижения центра масс ротора также изменится от нуля до величины v, определяемой из (3), практически безынерционно. Противоречие с законами Ньютона в этом случае отсутствует, поскольку объект (ротор) одновременно совершает как поступательное, так и вращательное движение. Возможность безынерционно изменять скорость движения объекта от нуля до определенной величины v является преимуществом данного способа.
вызывающего прецессию, угловая скорость прецессии мгновенно изменяется от нуля до величины W, определяемой из (2). Поскольку в результате прецессии ось ротора передвигается вместе с ротором, скорость передвижения центра масс ротора также изменится от нуля до величины v, определяемой из (3), практически безынерционно. Противоречие с законами Ньютона в этом случае отсутствует, поскольку объект (ротор) одновременно совершает как поступательное, так и вращательное движение. Возможность безынерционно изменять скорость движения объекта от нуля до определенной величины v является преимуществом данного способа.
Другое преимущество данного способа - это возможность использования накопленной энергии вращения ротора. При движении по данному способу направление движения объекта перпендикулярно силе  (или импульсу силы), вызывающей прецессию [3]. Это означает, что приложенная к ротору сила (или импульс силы) не совершает работы, а значит, не может изменить энергию движущегося объекта. Таким образом, увеличение кинетической энергии объекта (при увеличении скорости его центра масс) либо потенциальной энергии (например при подъеме ротора вверх, если сила направлена горизонтально и ось ротора прецессирует в вертикальной плоскости) может происходить только за счет уменьшения кинетической энергии вращения ЕКИН.ВР ротора, то есть за счет снижения собственной угловой скорости w ротора:
(или импульсу силы), вызывающей прецессию [3]. Это означает, что приложенная к ротору сила (или импульс силы) не совершает работы, а значит, не может изменить энергию движущегося объекта. Таким образом, увеличение кинетической энергии объекта (при увеличении скорости его центра масс) либо потенциальной энергии (например при подъеме ротора вверх, если сила направлена горизонтально и ось ротора прецессирует в вертикальной плоскости) может происходить только за счет уменьшения кинетической энергии вращения ЕКИН.ВР ротора, то есть за счет снижения собственной угловой скорости w ротора:

где величины  и w соответствуют обозначениям для формулы (2).
и w соответствуют обозначениям для формулы (2).
То есть, для движения объекта по данному способу может быть использована накопленная в роторе кинетическая энергия вращения, что является преимуществом данного способа.
Недостатком данного способа является то, что этот способ не позволяет перемещать объекты на расстояния, имеющие практическое значение (порядка десятков километров и более). Для этого радиус R окружности, по которой объект движется вокруг шарнирной опоры (расстояние между точками 2 и 3 на фиг. 1), должен быть такого же порядка величины, то есть необходимо изготовить материальную ось длиной несколько километров, что невозможно. Длина оси ротора, осуществимая в конструкциях типа фиг. 1, мала (порядка десятков сантиметров). Таким образом, согласно данному способу объект может передвигаться только по фиксированной окружности малого радиуса и на малое расстояние (порядка десятков сантиметров), что не имеет практического значения.
Задачей изобретения является создание способа движения объектов, который позволял бы использовать безынерционность прецессии ротора и накопленную в роторе энергию вращательного движения, и при этом давал возможность перемещать объекты на неограниченное расстояние.
Это достигается тем, что, одновременно с приложением к вращающемуся ротору компоненты внешней силы (либо импульса силы) в направлении, перпендикулярном собственной оси вращения ротора, ротор непрерывно ориентируют так, чтобы при любом его перемещении собственная ось вращения ротора проходила через произвольно выбранную точку пространства, причем ротор раскручивают так, чтобы собственная угловая скорость ротора была много больше, чем угловая скорость прецессии оси ротора.
На фиг. 1 изображен ротор, движущийся по способу-прототипу, на фиг. 2, фиг. 3 и фиг. 4 дана иллюстрация предложенного способа движения, на фиг. 5 приведена схема (пример) устройства, реализующего предложенный способ движения.
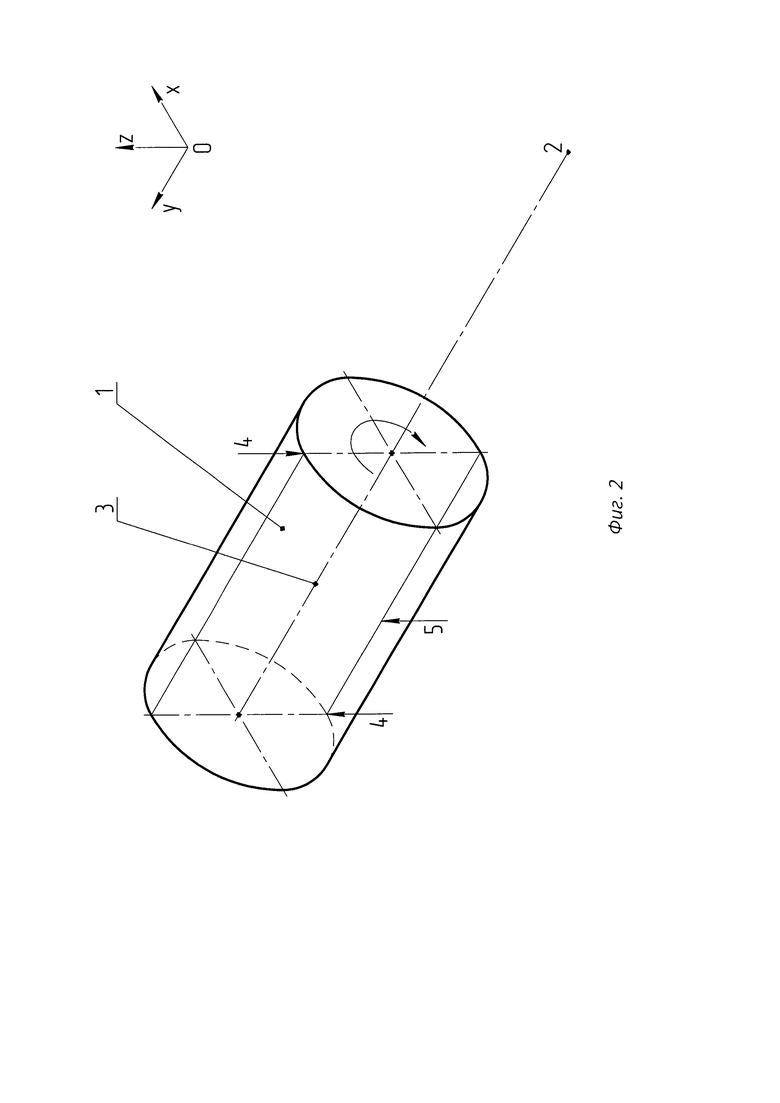
Суть предложенного способа проиллюстрирована на фиг. 2 и состоит в следующем.
В предложенном способе передвижение центра масс объекта в пространстве (так же, как в прототипе) производят за счет прецессии оси вращающегося ротора. Но, в отличие от прототипа, в предложенном способе не используют материальную ось с опорой на неподвижный шарнир.
Прецессию оси ротора создают следующим образом. Ротор 1 (см. фиг. 2) раскручивают вокруг оси ротора до угловой скорости w (на фиг. 2 ось ротора параллельна оси ОУ, направление вращения ротора обозначено стрелкой). В пространстве выбирают произвольную фиксированную точку так, чтобы она находилась на оси ротора либо на ее мысленном продолжении вне пределов объекта (точка 2 на фиг. 2). Если, при каком-либо перемещении центра масс 3 ротора в пространстве, его ось отклоняется от точки 2, ориентацию оси ротора немедленно корректируют так, чтобы она постоянно проходила через точку 2. Коррекцию производят с помощью внешней пары сил 4 (в тексте - пара сил  ), создающей вращающий момент, направленный перпендикулярно оси ротора и вызывающий ее прецессию (вращение) вокруг центра масс 3 ротора.
), создающей вращающий момент, направленный перпендикулярно оси ротора и вызывающий ее прецессию (вращение) вокруг центра масс 3 ротора.
В результате создают жесткую связь между осью ротора и прямой 2-3 на фиг. 2. То есть, на ось ротора фактически накладывают механическую связь, подобную той, что возникает в способе-прототипе вследствие опоры материальной оси вращения ротора на неподвижный шарнир.
Величину и направление векторов  непрерывно регулируют так, чтобы, при любом перемещении ротора в пространстве, ось ротора постоянно проходила через выбранную точку 2.
непрерывно регулируют так, чтобы, при любом перемещении ротора в пространстве, ось ротора постоянно проходила через выбранную точку 2.
К ротору прикладывают силу 5 (в тексте - сила  ), направленную перпендикулярно оси ротора. Сила
), направленную перпендикулярно оси ротора. Сила  действует в направлении OZ. Линия действия силы
действует в направлении OZ. Линия действия силы  проходит через центр масс 3 ротора и не создает вращающего момента относительно точки 3. (Если особенности конструкции объекта требуют, чтобы линия действия силы
проходит через центр масс 3 ротора и не создает вращающего момента относительно точки 3. (Если особенности конструкции объекта требуют, чтобы линия действия силы  не проходила через центр масс 3, возникший вращающий момент относительно точки 3 компенсируют, прикладывая компенсирующую внешнюю пару сил.)
не проходила через центр масс 3, возникший вращающий момент относительно точки 3 компенсируют, прикладывая компенсирующую внешнюю пару сил.)
Вследствие жесткой связи между осью ротора и прямой 2-3 сила  порождает момент силы относительно точки 2, находящейся на оси ротора. Как и в прототипе, это приводит к изменению момента импульса ротора, в результате чего возникает прецессия оси ротора уже вокруг точки 2, то есть ось ротора начинает вращаться с угловой скоростью прецессии
порождает момент силы относительно точки 2, находящейся на оси ротора. Как и в прототипе, это приводит к изменению момента импульса ротора, в результате чего возникает прецессия оси ротора уже вокруг точки 2, то есть ось ротора начинает вращаться с угловой скоростью прецессии  Вращение происходит в плоскости, перпендикулярной направлению приложенной силы
Вращение происходит в плоскости, перпендикулярной направлению приложенной силы  если выполняется условие (1). Центр вращения оси ротора находится в фиксированной точке 2.
если выполняется условие (1). Центр вращения оси ротора находится в фиксированной точке 2.
Ротор движется вместе с прецессирующей осью в направлении, перпендикулярном оси ротора и направлению приложенной силы (первоначально - в направлении ОХ на фиг. 2, при этом внешняя пара сил  будет ориентирована параллельно оси OZ).
будет ориентирована параллельно оси OZ).
Таким образом, в предложенном способе одновременно используют два вида прецессии: прецессию оси ротора вокруг заданной точки 2 и прецессию оси того же ротора вокруг его центра масс 3.
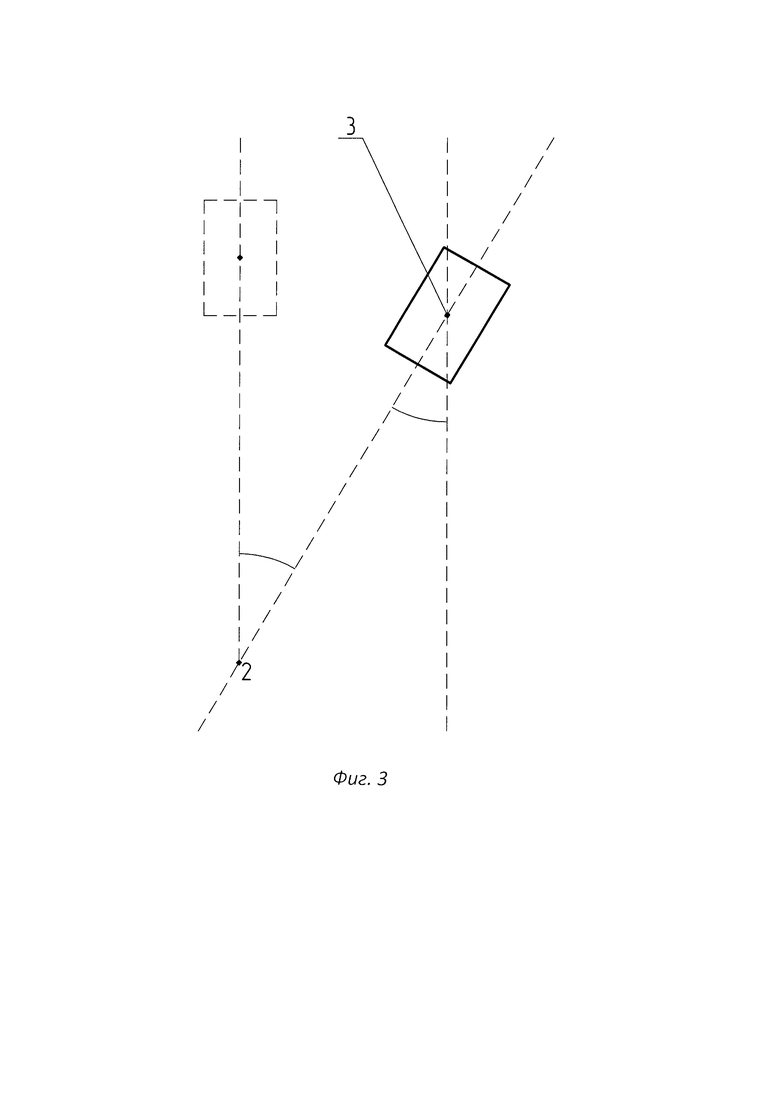
На фиг. 3 показано положение ротора в начале движения (ротор изображен пунктиром) и через интервал времени Δt (ротор изображен сплошными линиями). Движение происходит в плоскости рисунка. (Сила  и пара сил
и пара сил  обозначенные на фиг. 2 цифрами 5 и 4, направлены перпендикулярно плоскости рисунка фиг. 3). Ось ротора вращается (прецессирует) в плоскости рисунка вокруг удаленной точки 2 с угловой скоростью прецессии W.
обозначенные на фиг. 2 цифрами 5 и 4, направлены перпендикулярно плоскости рисунка фиг. 3). Ось ротора вращается (прецессирует) в плоскости рисунка вокруг удаленной точки 2 с угловой скоростью прецессии W.
При этом ротор совершает сложное движение в пространстве. Во-первых, центр масс 3 ротора описывает окружность радиуса R, где R - расстояние между точками 2 и 3. Во-вторых, ось ротора вращается (прецессирует) вокруг центра масс 3 ротора с угловой скоростью под действием внешней пары сил  обозначенной цифрой 4 на фиг. 2. Из фиг. 3 видно, что W1 равно W.
обозначенной цифрой 4 на фиг. 2. Из фиг. 3 видно, что W1 равно W.
Кроме этого, на ротор, вращающийся вокруг точки 2, действует центробежная сила, в результате чего ротор приобретает составляющую скорости, направленную вдоль радиуса R, который при этом постоянно возрастает. Величину R контролируют путем изменения координат неподвижной точки 2.
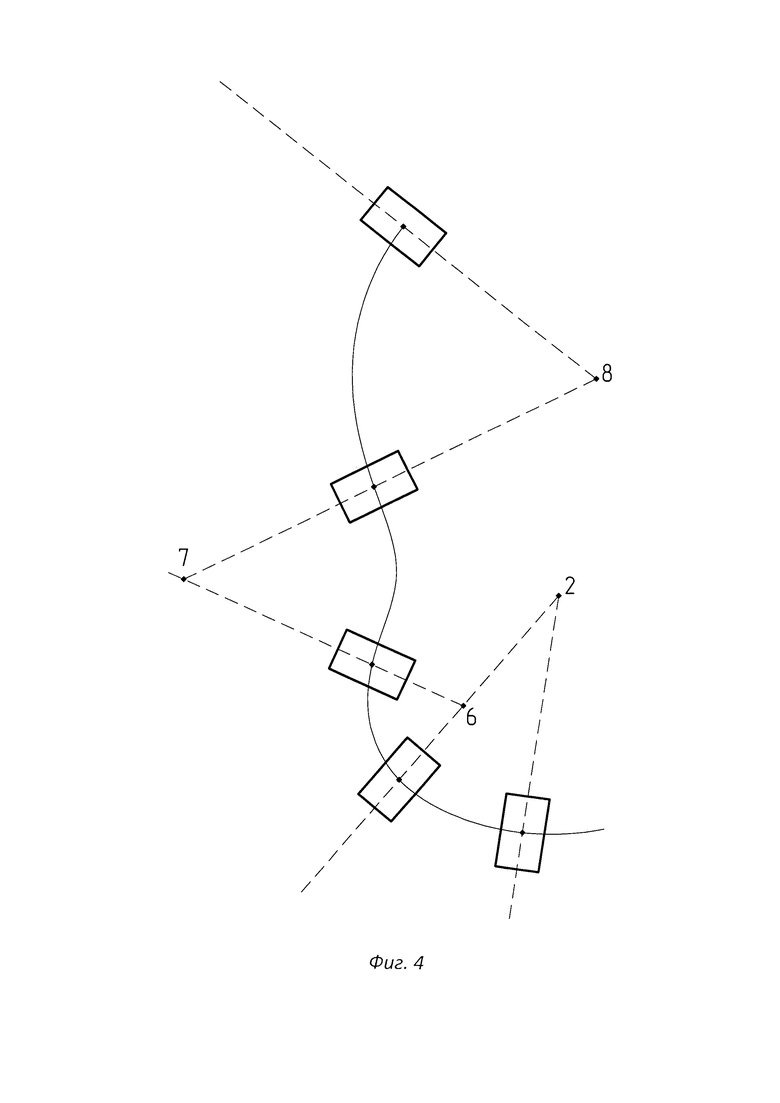
На фиг. 4 показана траектория движения объекта по предложенному способу (сплошная кривая). Движение происходит в плоскости рисунка (Сила  и пара сил
и пара сил  обозначенные на фиг. 2 цифрами 5 и 4, направлены перпендикулярно плоскости рисунка фиг. 4). Вращающийся с собственной угловой скоростью w ротор (изображен прямоугольником) начинает движение в момент времени t1 (ось ротора прецессирует вокруг точки 2). В момент времени t2 выбирают новую неподвижную точку (6 вместо 2), расположенную на оси ротора ближе к его центру масс. В результате траектория движения объекта изменяется. В момент t3 выбирают другую неподвижную точку (7 вместо 6), расположенную на оси ротора по другую сторону от траектории движения. Траектория вновь изменяется. В момент t4 точку 7 заменяют на точку 8 на оси ротора, как показано на фиг. 4.
обозначенные на фиг. 2 цифрами 5 и 4, направлены перпендикулярно плоскости рисунка фиг. 4). Вращающийся с собственной угловой скоростью w ротор (изображен прямоугольником) начинает движение в момент времени t1 (ось ротора прецессирует вокруг точки 2). В момент времени t2 выбирают новую неподвижную точку (6 вместо 2), расположенную на оси ротора ближе к его центру масс. В результате траектория движения объекта изменяется. В момент t3 выбирают другую неподвижную точку (7 вместо 6), расположенную на оси ротора по другую сторону от траектории движения. Траектория вновь изменяется. В момент t4 точку 7 заменяют на точку 8 на оси ротора, как показано на фиг. 4.
В результате траектория объекта представляет собой последовательность отрезков кривых. Форма каждого из этих отрезков кривых зависит от угловой скорости прецессии оси ротора и расстояния R от неподвижной точки (точка 2, 6, 7, 8 на фиг. 4) до центра масс ротора. Изменяя координаты неподвижной точки, каждый раз изменяют величину R (расстояние от неподвижной точки до центра масс ротора), а с ней и вектор  (см. (2)), и вектор скорости
(см. (2)), и вектор скорости  (см. (3)), и траекторию движения объекта.
(см. (3)), и траекторию движения объекта.
Если действие сил  (обозначены цифрами 5 и 4 на фиг. 2) прекращают, прецессия мгновенно останавливается, и объект (ротор) продолжает движение уже по инерции, с приобретенной скоростью
(обозначены цифрами 5 и 4 на фиг. 2) прекращают, прецессия мгновенно останавливается, и объект (ротор) продолжает движение уже по инерции, с приобретенной скоростью  Его дальнейшая траектория движения, скорость и ускорение зависят от сопротивления среды (или его отсутствия - в космическом пространстве), а также от воздействия на объект других сил.
Его дальнейшая траектория движения, скорость и ускорение зависят от сопротивления среды (или его отсутствия - в космическом пространстве), а также от воздействия на объект других сил.
По предложенному способу объект (ротор) движется в пространстве в результате прецессии оси ротора вокруг фиксированной точки 2 (фиг. 2). Поскольку при воздействии силы  (обозначена цифрой 5 на фиг. 2) угловая скорость прецессии изменяется от нуля до величины W безынерционно, скорость движения центра масс ротора изменяется от нуля до величины v, определяемой по формуле (3), также безынерционно.
(обозначена цифрой 5 на фиг. 2) угловая скорость прецессии изменяется от нуля до величины W безынерционно, скорость движения центра масс ротора изменяется от нуля до величины v, определяемой по формуле (3), также безынерционно.
При движении по предложенному способу приложенная к ротору сила  (или импульс силы) не совершает работы, а значит, не может изменить энергию движущегося объекта. Увеличение энергии объекта в процессе движения может происходить только за счет расходования кинетической энергии вращения ЕКИН.ВР, накопленной в роторе.
(или импульс силы) не совершает работы, а значит, не может изменить энергию движущегося объекта. Увеличение энергии объекта в процессе движения может происходить только за счет расходования кинетической энергии вращения ЕКИН.ВР, накопленной в роторе.
В предложенном способе отсутствует материальная связь между ротором и неподвижным закрепленным шарниром, ограничивающая перемещение ротора в пространстве. Поэтому, в отличие от прототипа, предложенный способ позволяет передвигать объект на неограниченное расстояние.
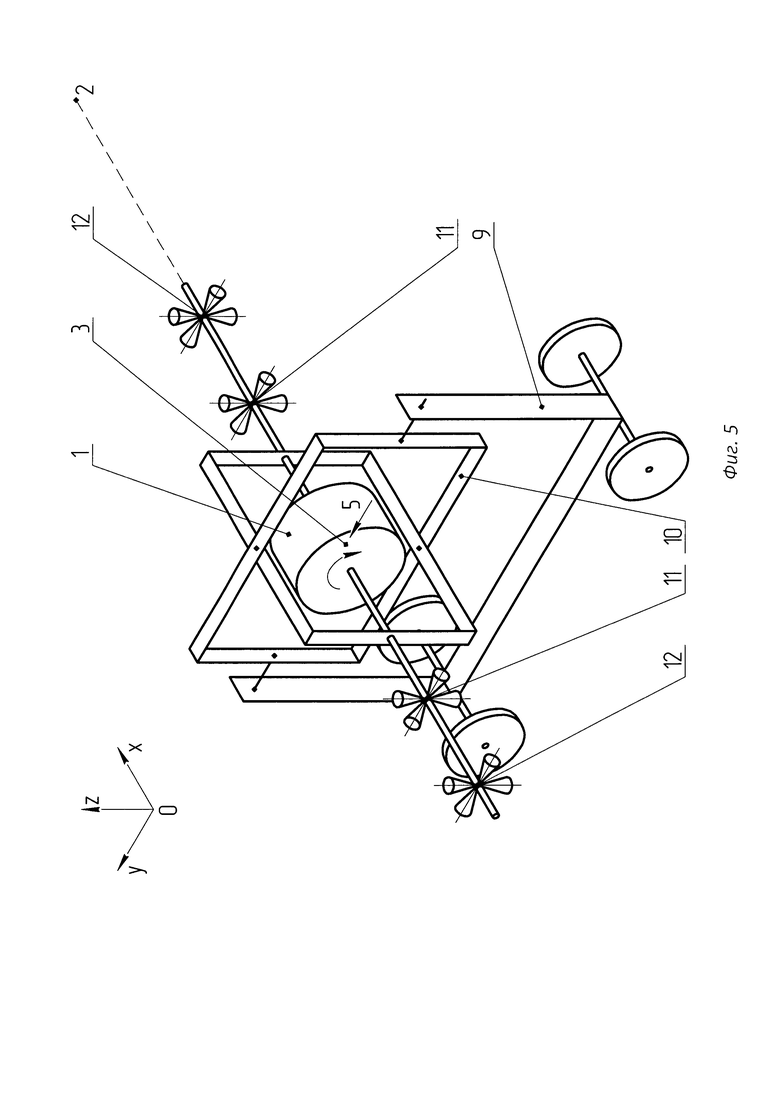
Предложенный способ можно осуществить например следующим образом (см. фиг. 5)
Движущимся объектом служит платформа 9 на колесах, на которой закреплен карданов подвес 10 трехстепенного гироскопа, ротор 1 которого имеет цилиндрическую форму и изготовлен из сплошного однородного материала. Высота цилиндра ротора равна 0,15 м, радиус цилиндра равен 0,17 м. Масса ротора равна 100 кг, масса всего объекта (платформа вместе с гироскопом) равна 200 кг. Ось ротора первоначально направлена горизонтально и проходит через выбранную, фиксированную в пространстве точку 2, расположенную вне пределов объекта на расстоянии 2,83 м от центра масс 3 ротора. Центр масс 3 ротора совпадает с точкой подвеса гироскопа.
На оси ротора, на равных и противоположных расстояниях от центра масс 3 ротора, расположены две системы сопел реактивных двигателей 11, предназначенных для формирования равных и одинаково направленных сил. Их равнодействующая сила тяги 5 (то есть сила  ) приложена к центру масс ротора перпендикулярно его оси. Также на оси ротора, на равных и противоположных расстояниях от центра масс ротора, расположены две системы сопел реактивных двигателей 12, предназначенных для формирования пары сил
) приложена к центру масс ротора перпендикулярно его оси. Также на оси ротора, на равных и противоположных расстояниях от центра масс ротора, расположены две системы сопел реактивных двигателей 12, предназначенных для формирования пары сил  обеспечивающих приложение крутящего момента, вектор которого направлен перпендикулярно оси ротора. Расстояние от центра масс 3 ротора до каждой из систем реактивных двигателей 12 равно 1 м. Конструкция реактивных двигателей известна [4] и не является предметом настоящего изобретения.
обеспечивающих приложение крутящего момента, вектор которого направлен перпендикулярно оси ротора. Расстояние от центра масс 3 ротора до каждой из систем реактивных двигателей 12 равно 1 м. Конструкция реактивных двигателей известна [4] и не является предметом настоящего изобретения.
На платформе 9 установлен блок управления (на фиг. 5 не показан, чтобы не загромождать рисунок), управляющий процессом непрерывного совмещения оси ротора с воображаемой прямой, проходящей через центр масс 3 ротора и выбранную неподвижную точку 2. Блок управления включает в себя навигационные средства (инерциальные и/или спутниковые), которые непрерывно измеряют координаты центра масс 3 в глобальной системе координат, что позволяет построить прямую 2-3. В случае расхождения оси ротора с прямой 2-3 блок управления вырабатывает управляющий сигнал на сопла реактивных двигателей 12. Реактивные двигатели 12 под действием управляющего сигнала создают крутящий момент относительно центра масс вращающегося ротора, вызывающий прецессию оси ротора так, чтобы ось ротора всегда проходила через точку 2 при любом перемещении ротора в пространстве. Принципы работы и конструкция инерциальных и спутниковых средств навигации известны и не являются предметом настоящего изобретения.
Ротор раскручивают относительно его оси, например с помощью внешнего устройства (на фиг. 5 не показано) до угловой скорости w, равной 6280 рад/с в системе СИ (то есть 1000 оборотов в секунду (об/с)). Направление вращения показано на фиг. 5.
С помощью реактивных двигателей 11 формируют силу тяги 5 (то есть силу  ), равную 300 Н, приложенную горизонтально, в направлении ОУ, перпендикулярно оси ротора. Линия действия силы
), равную 300 Н, приложенную горизонтально, в направлении ОУ, перпендикулярно оси ротора. Линия действия силы  проходит через центр масс ротора. В результате того, что ось ротора всегда вынужденно проходит через точку 2, сила
проходит через центр масс ротора. В результате того, что ось ротора всегда вынужденно проходит через точку 2, сила  создает момент силы относительно точки 2, вызывающий прецессию оси ротора вокруг этой точки.
создает момент силы относительно точки 2, вызывающий прецессию оси ротора вокруг этой точки.
Под действием силы  платформа на колесах приходит в движение, и сразу начинается прецессия (вращение) оси ротора в вертикальной плоскости вокруг точки 2, с угловой скоростью прецессии WВЕРТИК. При этом ротор (вместе с подвешенным к нему грузом - платформой на колесах) начинает подниматься вверх, в направлении OZ (если ротор вращается в направлении, показанном на фиг. 5).
платформа на колесах приходит в движение, и сразу начинается прецессия (вращение) оси ротора в вертикальной плоскости вокруг точки 2, с угловой скоростью прецессии WВЕРТИК. При этом ротор (вместе с подвешенным к нему грузом - платформой на колесах) начинает подниматься вверх, в направлении OZ (если ротор вращается в направлении, показанном на фиг. 5).
Во время прецессии ось ротора должна постоянно совпадать (совмещаться) с прямой 2-3. Требуемое совмещение обеспечивают реактивные двигатели 12. Для этого двигатели 12 формируют внешнюю пару сил тяги  направленных параллельно оси ОУ (далее в тексте
направленных параллельно оси ОУ (далее в тексте  ), которая вызывает прецессию оси ротора вокруг центра масс 3, так же в вертикальной плоскости и с такой же начальной угловой скоростью прецессии WВЕРТИК.
), которая вызывает прецессию оси ротора вокруг центра масс 3, так же в вертикальной плоскости и с такой же начальной угловой скоростью прецессии WВЕРТИК.
Как только объект оторвется от земной поверхности, начинается прецессия оси ротора вокруг точки 2 уже в горизонтальной плоскости под действием силы в 2000 Н (вес ротора вместе с платформой), направленной параллельно оси OZ на фиг. 5. (Считаем, что сила в 2000 Н приложена к центру масс ротора). Объект приобретает горизонтальную составляющую скорости.
При этом (как ранее было показано на фиг. 3) ось ротора должна вращаться также и вокруг центра масс 3 ротора, в той же горизонтальной плоскости и с такой же угловой скоростью WГОРИЗ. Для этого двигатели 12 формируют дополнительную внешнюю пару сил тяги (далее в тексте  ), направленную параллельно оси OZ на фиг. 5 и перпендикулярно
), направленную параллельно оси OZ на фиг. 5 и перпендикулярно  Это происходит под действием управляющего сигнала, поступающего на двигатели 12 с блока управления в случае расхождения оси ротора с прямой 2-3 на фиг. 5.
Это происходит под действием управляющего сигнала, поступающего на двигатели 12 с блока управления в случае расхождения оси ротора с прямой 2-3 на фиг. 5.
В результате объект (ротор в кардановом подвесе на платформе) будет одновременно подниматься вверх и двигаться в горизонтальной плоскости.
Если объект выполняет задачи наземного либо воздушного транспорта, передвижение объекта из одного пункта в другой производят на высоте h над земной поверхностью. По достижении требуемой высоты h подъем объекта останавливают, прекращая действие силы  вызывающей прецессию оси ротора вокруг точки 2 в вертикальной плоскости. После этого объект станет двигаться только горизонтально, под действием силы собственного веса Р, вызывающей прецессию оси ротора в горизонтальной плоскости вокруг выбранной неподвижной точки 2.
вызывающей прецессию оси ротора вокруг точки 2 в вертикальной плоскости. После этого объект станет двигаться только горизонтально, под действием силы собственного веса Р, вызывающей прецессию оси ротора в горизонтальной плоскости вокруг выбранной неподвижной точки 2.
Если перед началом движения объект поднять до заданной высоты с помощью транспортного средства (самолета, ракеты и пр.), то инициировать прецессию в вертикальной плоскости не нужно, и объект сразу начинает движение в горизонтальной плоскости за счет прецессии под действием силы веса Р.
При необходимости, в процессе подъема объекта на высоту h либо его последующего движения, выбирают новую неподвижную точку (изменяют координаты точки 2 в глобальной системе координат) и перенастраивают вычислительные и навигационные (инерционные и/или спутниковые) средства, управляющие работой реактивных двигателей 12 так, чтобы при любом перемещении ротора его ось проходила через новую неподвижную точку. В результате изменяют вектор  (см. (2)), а с ним и вектор скорости
(см. (2)), а с ним и вектор скорости  объекта (см. (3)), и траекторию его движения, то есть управляют параметрами движения объекта.
объекта (см. (3)), и траекторию его движения, то есть управляют параметрами движения объекта.
При передвижении объекта в космическом пространстве сила гравитации пренебрежимо мала. В этом случае величину силы  в (2) можно существенно уменьшить по сравнению с силой веса Р объекта. Если при этом увеличить расстояние R между точками 2 и 3 (фиг. 5), можно получить значительную скорость v объекта, прикладывая весьма малую силу
в (2) можно существенно уменьшить по сравнению с силой веса Р объекта. Если при этом увеличить расстояние R между точками 2 и 3 (фиг. 5), можно получить значительную скорость v объекта, прикладывая весьма малую силу  Так, из (2) и (3) следует, что при увеличении R до 700 м можно получить скорость нашего объекта, равную 440 м/с (в системе СИ), то есть около 1600 км/час, приложив силу
Так, из (2) и (3) следует, что при увеличении R до 700 м можно получить скорость нашего объекта, равную 440 м/с (в системе СИ), то есть около 1600 км/час, приложив силу  равную всего лишь 8 Н (0,8 кгс). Отметим, что вследствие безынерционности прецессии наш объект массой 200 кг приобретает данную скорость практически мгновенно. Для сравнения: чтобы в космосе разогнать до скорости 1600 км/час тело массой 200 кг силой в 8 Н, приложенной в направлении движения тела, потребуется более 3 часов.
равную всего лишь 8 Н (0,8 кгс). Отметим, что вследствие безынерционности прецессии наш объект массой 200 кг приобретает данную скорость практически мгновенно. Для сравнения: чтобы в космосе разогнать до скорости 1600 км/час тело массой 200 кг силой в 8 Н, приложенной в направлении движения тела, потребуется более 3 часов.
Техническая осуществимость предложенного способа подтверждается результатами оценочных расчетов параметров движения для описанного выше примера. Так, начальную угловую скорость прецессии WВЕРТИК. (см. выше) оси ротора в вертикальной плоскости можно определить по формуле (2), где в нашем случае F равно 300 Н, R равно 2,83 м, w равно 6280 рад/с,  равно 1,45 кг⋅м2 (величина
равно 1,45 кг⋅м2 (величина  вычислена по известной формуле для момента инерции сплошного однородного цилиндра [5]). Из (2) следует, что величина WВЕРТИК. в начале прецессии равна около 0,09 рад/с. Видно, что условие (1) выполняется.
вычислена по известной формуле для момента инерции сплошного однородного цилиндра [5]). Из (2) следует, что величина WВЕРТИК. в начале прецессии равна около 0,09 рад/с. Видно, что условие (1) выполняется.
Начальную угловую скорость прецессии WГОРИЗ. оси нашего ротора в горизонтальной плоскости также можно определить из (2), где F равно 2000 Н, R равно 2,83 м, w равно 6280 рад/с,  равно 1,45 кг⋅м2. Из (2) следует, что величина WГОРИЗ. в начале прецессии равна около 0,63 рад/с. Условие (1) также выполняется.
равно 1,45 кг⋅м2. Из (2) следует, что величина WГОРИЗ. в начале прецессии равна около 0,63 рад/с. Условие (1) также выполняется.
Силу тяги реактивного двигателя  (см. выше) можно определить из (2), где для нашего случая W равно WВЕРТИК., то есть 0,09 рад\с, R равно 2 м (удвоенное расстояние от центра масс N ротора до системы реактивных двигателей 7), w равно 6280 рад/с, равно 1,45 кг⋅м2. Из (2) следует, что величина
(см. выше) можно определить из (2), где для нашего случая W равно WВЕРТИК., то есть 0,09 рад\с, R равно 2 м (удвоенное расстояние от центра масс N ротора до системы реактивных двигателей 7), w равно 6280 рад/с, равно 1,45 кг⋅м2. Из (2) следует, что величина  равна около 410 Н (41 кг с).
равна около 410 Н (41 кг с).
Силу тяги реактивного двигателя  можно определить из (2), где W равно WГОРИЗ., то есть 0,628 рад\с, R равно 2 м (удвоенное расстояние от центра масс С ротора до системы реактивных двигателей 7), w равно 6280 рад/с, равно 1,42 кг⋅м2. Из (1) следует, что величина
можно определить из (2), где W равно WГОРИЗ., то есть 0,628 рад\с, R равно 2 м (удвоенное расстояние от центра масс С ротора до системы реактивных двигателей 7), w равно 6280 рад/с, равно 1,42 кг⋅м2. Из (1) следует, что величина  равна около 2870 Н, или 287 кг с.
равна около 2870 Н, или 287 кг с.
Полученные требуемые значения реактивной тяги  осуществимы на практике. Подобную величину тяги имели например малогабаритные реактивные двигатели ТРДД фирмы Pratt & Whitney Canada Corp. семейства PW600 с тягой до 1361 кг с, созданные еще в XX веке.
осуществимы на практике. Подобную величину тяги имели например малогабаритные реактивные двигатели ТРДД фирмы Pratt & Whitney Canada Corp. семейства PW600 с тягой до 1361 кг с, созданные еще в XX веке.
Техническая возможность использования кинетической энергии вращающегося ротора для транспортировки груза предложенным способом вытекает из следующего. Пусть движение нашего объекта (ротор плюс полезный груз) происходит на высоте 3 м над земной поверхностью. При подъеме объекта на эту высоту будет затрачена энергия Е, равная произведению полного веса объекта Р, равного 2000 Н, на высоту 3 м, то есть 6000 Дж. На эту величину должна уменьшиться кинетическая энергия вращения ротора ЕКИН.ВР, равная первоначально, как следует из (4), около 28600000 Дж. Видно, что ЕКИН.ВР много больше, чем Е. Это означает, что потеря энергии вращения при подъеме незначительна. Из (4) следует, что изменение (уменьшение) величины w в результате подъема также незначительно, то есть условие (1) не нарушается. Таким образом, наш полезный груз весом в 1000 Н (около 100 кг с) может быть поднят за счет энергии вращения ротора на высоту 3 м над земной поверхностью для дальнейшей транспортировки.
Значение ЕКИН.ВР можно при необходимости увеличить, дополнительно раскручивая ротор в процессе движения, например с помощью реактивных двигателей малой тяги [6] (на рисунках не показаны).
Техническая достижимость высоких угловых скоростей вращения ротора подтверждается тем, что частота вращения 1000 об/с (6280 рад/с) прописана в действующем государственном стандарте [7].
Техническая осуществимость предложенного способа подтверждается также тем, что на практике уже используются значения параметров роторов, близкие к указанным в примере осуществления способа. Так, роторы трех силовых гироскопов американской орбитальной станции «Скайлэб», запущенной еще в 1973 году, весили по 110 кг каждый и вращались с частотой 150 об/с. Силовые гироскопы на Международной космической станции (МКС) имеют характерные размеры более метра и массу ротора около 300 кг. [8].
Техническая осуществимость непрерывной ориентации оси ротора зависит от достижимой точности измерений координат в глобальном пространстве. Чтобы при любом перемещении ротора его ось проходила через заданную произвольную точку 2 (см. фиг. 3), необходимо, во-первых, определить прямую 2-3, проходящую через центр масс 3 ротора и точку 2. Координаты точки 2 заданы и не требуют измерения, а текущие координаты точки 3 измеряют, используя системы спутниковой и/или инерциальной навигации. При этом погрешность измерений координат должна быть существенно меньше характерных размеров ротора. Сегодня системы неспутниковой навигации позволяют проводить измерения с точностью позиционирования 3-5 мм [9], и достижимая точность измерений со временем будет возрастать. В рассмотренном примере диаметр ротора составляет 34 см. То есть, требование соотношения технически достижимой погрешности измерений и характерных размеров ротора выполняется.
Во-вторых, ось ротора необходимо совместить с прямой 2-3 (фиг. 3). Для этого измеряют угол рассогласования между этими двумя прямыми, и затем подают управляющий сигнал на реактивные двигатели С10 (фиг. 3) с целью уменьшить угол рассогласования до нуля. Подобные операции технически реализованы например при управлении ориентацией космических аппаратов [1, 2].
Таким образом, непрерывная ориентация оси ротора на произвольную точку также технически осуществима.
Реализация предложенного способа позволяет получить следующие преимущества:
- осуществлять движение объектов, в том числе выполняющих функции автомобильного и железнодорожного транспорта, вместе с полезным грузом, без использования дорожной сети и рельсовых путей;
- осуществлять движение объектов, в том числе космических аппаратов, с практически безынерционным (мгновенным) изменением их скорости;
- доставлять на орбиту космические аппараты без использования ракет-носителей и возвращать их обратно на Землю;
- осуществлять движение объектов за счет энергии, накопленной в виде кинетической энергии вращения.
Источники информации:
1. Раушенбах Б.В., Токарь Е.Н. Управление ориентацией космических аппаратов. Москва. «Наука». 1974.
2. Петрищев В.Ф. Элементы теории гироскопа и его применение для управления космическими аппаратами: Учеб. пособие / Самар. гос. аэрокосм. ун-т. Самара, 2004.
3. Алешкевич В.А., Деденко Л.Г., Караваев В.А. Механика твердого тела. Лекции. (Университетский курс общей физики), изд-во Физического факультета МГУ (НЭВЦ ФИПТ), 1997 г., стр. 57-59.
4. Добровольский М.В. Жидкостные ракетные двигатели. Основы проектирования: учебник для высших учебных заведений. Москва, Изд-во МГТУ им. Н.Э.Баумана, 2016
5. Савельев И.В. Курс общей физики. Том 1: Механика, колебания и волны, молекулярная физика. М.: Наука, 1970, с. 148.
6. Егорычев B.C. Жидкостные ракетные двигатели малой тяги и их характеристики: учеб. пособие. Самара: Изд-во СГАУ, 2014.
7. ГОСТ 10683-73 Машины электрические. Номинальные частоты вращения и допускаемые отклонения.
8. Википедия, статья «Гиродин».
9. Девятьяров Е. Навигация без спутника. Известия IZ.RU, 14.09.2017.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОДНООСНОЕ КОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2007 |
|
RU2333862C1 |
| Учебный прибор для демонстрации прецессии гироскопа | 1988 |
|
SU1555706A1 |
| ОДНООСНЫЙ СИЛОВОЙ ГИРОСТАБИЛИЗАТОР | 2008 |
|
RU2382331C1 |
| УЧЕБНЫЙ ПРИБОР ДЛЯ ДЕМОНСТРАЦИИ ГИРОСКОПИЧЕСКОГО ЭФФЕКТА | 1992 |
|
RU2028011C1 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
| Способ динамичной высокоточной ориентации и стабилизации космического аппарата | 2018 |
|
RU2702932C1 |
| ВИХРЕВОЙ ЖИДКОСТНОЙ ТОРОИДАЛЬНЫЙ ГИРОСКОП | 2014 |
|
RU2573606C1 |
| Способ управления движением космического аппарата с управляемой ориентацией | 2020 |
|
RU2767648C1 |
| Прибор для демонстрации гироскопических явлений | 1984 |
|
SU1251156A1 |
| СПОСОБ СТАБИЛИЗАЦИИ СЛАБОДЕМПФИРОВАННОГО НЕУСТОЙЧИВОГО ОБЪЕКТА УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2581787C2 |
Способ предназначен для движения транспортных средств и космических кораблей. К раскрученному ротору (1) прикладывают пару сил (4), создающую вращающий момент относительно центра масс (3) ротора, направленный перпендикулярно собственной оси вращения ротора (далее - ось). Это вызывает прецессию оси вокруг точки (3). Ориентацию оси непрерывно регулируют с помощью пары сил (4) так, чтобы ось постоянно проходила через удаленную точку (2) при любом перемещении ротора в пространстве. Одновременно к ротору прикладывают внешнюю силу (5), перпендикулярную оси и создающую момент силы относительно точки (2), вызывающий прецессию оси вокруг точки (2). Центр масс ротора движется за счет прецессии оси. При этом угловую скорость собственного вращения ротора поддерживают много большей, чем угловая скорость прецессии оси. Способ позволяет мгновенно изменять скорость объекта за счет безынерционности прецессии оси, а также использовать при движении накопленную кинетическую энергию вращения ротора. 5 ил.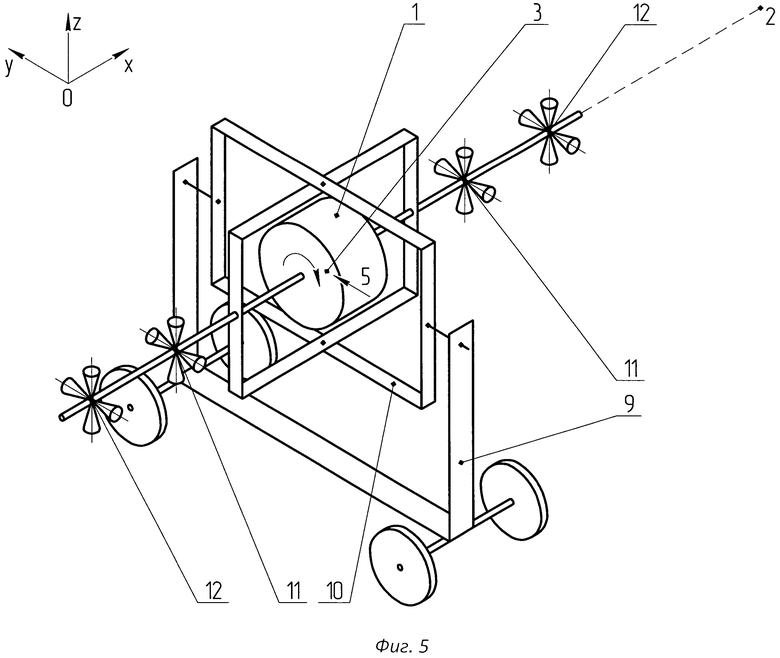
Способ движения центра масс объекта, включающий использование вращающегося ротора, отличающийся тем, что одновременно с приложением к вращающемуся ротору компоненты внешней силы либо импульса силы в направлении, перпендикулярном собственной оси вращения ротора, ротор непрерывно ориентируют так, чтобы при любом его перемещении собственная ось вращения ротора проходила через произвольно выбранную точку пространства, причем ротор раскручивают так, чтобы собственная угловая скорость ротора была много больше, чем угловая скорость прецессии оси ротора.
| Алешкевич В.А., Деденко Л.Г., Караваев В.А | |||
| Механика твердого тела | |||
| Лекции | |||
| (Университетский курс общей физики), изд-во Физического факультета МГУ (НЭВЦ ФИПТ), 1997 г., стр | |||
| Способ получения на волокне оливково-зеленой окраски путем образования никелевого лака азокрасителя | 1920 |
|
SU57A1 |
| СПОСОБ ПОДДЕРЖАНИЯ ТРЕХОСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА С СИЛОВЫМИ ГИРОСКОПАМИ И ЦЕЛЕВОЙ НАГРУЗКОЙ | 2006 |
|
RU2341419C2 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ, УСКОРЕННОГО ВОССТАНОВЛЕНИЯ И КОНТРОЛЯ СИЛОВОЙ ГИРОСКОПИЧЕСКОЙ ВЕРТИКАЛИ | 2000 |
|
RU2172934C1 |

