Изобретение относится к способу управления бортовой и/или килевой качкой судна при нулевой или малой скорости судна.
В частности, изобретение относится к способу определения положения стабилизаторов для уменьшения угла крена при бортовой качке и/или угла крена при килевой качке судна, стоящего на якоре с нулевой скоростью или плывущего с малой скоростью.
Уменьшение бортовой качки судна при нулевой или малой скорости судна достигается поворотом стабилизаторов для создания бортовой качки, способной тормозить бортовую качку судна. Известно, что фактически при нулевой или малой скорости судна сила развивается от скорости поворота стабилизаторов или других устройств.
Из уровня техники, в частности из патента ЕР 2669177 В1, известен способ управления стабилизатором для успокоения бортовой качки судов, не плывущих и стоящих на якоре, который включает следующие этапы: обнаружение по меньшей мере одного идентифицирующего параметра бортовой качки судна, оценку предполагаемого колебания при бортовой качке судна в зависимости от обнаруженного параметра, определение траектории движения стабилизатора в зависимости от предполагаемой бортовой качки, и управление движением стабилизатора в зависимости от траектории.
Способ, описанный в патенте ЕР 2669177 В1, дает возможность моделировать колебания при бортовой качке судна с помощью синусоидальной волны и определять траекторию движения стабилизатора в зависимости от оценки дестабилизирующего момента моря и стабилизирующего момента стабилизатора.
В частности, способ, описанный в патенте ЕР 2669177 В1, дает возможность оценить, при какой скорости целесообразно перемещать стабилизатор, чтобы получить успокаивающий эффект путем постепенного выбора наиболее соответствующего типа траектории, чтобы избежать необходимости стопорить стабилизатор, когда стабилизирующее влияние становится отрицательным. Момент времени, когда стабилизатор приводится в движение, - это начало бортовой качки или чуть раньше.
В общем, решение, принятое всеми производителями стабилизаторов, позволяет осуществлять перемещение стабилизатора, когда угол крена при бортовой качке судна превышает нулевое значение, а именно, когда угловая скорость бортовой качки принимает свое максимальное значение или превышает его. Стабилизаторы перемещаются прерывисто, так сказать релейно, или толчками, от одного конца к другому, рассеивая максимальную энергию бортовой качки, чтобы добиться максимального демпфирования.
На существующем уровне техники при перемещении стабилизатора при максимальной угловой скорости бортовой качки, а именно при угле крена при бортовой качке приблизительно 0°, соответствующем горизонтали судна, судно останавливается, если действия стабилизаторов достаточно, когда угол крена при бортовой качке не находится в точке устойчивого равновесия. Поэтому судно вынуждено двигаться, возвращаясь к точке устойчивого равновесия. Таким образом, угол крена при бортовой качке обычно проходит в противоположном направлении и требует дополнительной коррекции стабилизаторов. Это означает практическую невозможность успокоения малой бортовой качки, создавая одновременно движение и управляющее движение после, при котором судно вынуждено все еще выполнять небольшой угол крена, чтобы иметь возможность вернуться к своему равновесию, однако без максимального демпфирования и тем более комфорта.
Кроме того, такое прерывистое движение, так называемое релейное перемещение, или перемещение толчками, стабилизаторов при максимальной угловой скорости бортовой качки или при максимальной кинетической энергии, генерирует противодействующую бортовую качку, которую пассажир на борту корабля может воспринимать как неприятный поперечный удар, известный и описанный в литературе как внезапный толчок, когда стабилизаторы начинают свой ход и часто также, когда стабилизаторы останавливаются.
Целью изобретения является решение вышеупомянутых существующих проблем путем создания способа, дающего возможность рассеивать энергию бортовой качки судна без применения распространенной зависимости, согласно которой: максимальный комфорт и максимальное демпфирование бортовой качки судна соответствуют максимальному рассеянию энергии.
Другой целью изобретения является возможность отказа от способа на основе этой распространенной зависимости. А именно: осуществление движения стабилизатора при нулевой или почти нулевой бортовой качке.
Еще одной целью является создание способа, который дает возможность останавливать угол крена судна при бортовой качке на нуле или в точке его устойчивого равновесия, когда момент, развиваемый стабилизатором, достаточен для противодействия движению крена.
Следующей целью является создание способа, который дает возможность стабилизаторам совершать движения, свободные от поперечных ударов, со всеми преимуществами для комфорта.
Еще одной целью является создание способа, который дает возможность выполнять управляющее действие, которое можно прекратить в точке устойчивого равновесия бортовой качки, вместо включения в такой точке или рядом с ней.
Вышеуказанные и другие цели и преимущества изобретения, вытекающие из нижеследующего описания, достигаются благодаря способу управления бортовой качкой судна при нулевой или малой скорости судна по п. 1 формулы изобретения. Предпочтительные варианты осуществления и рядовые варианты настоящего изобретения изложены в зависимых пунктах формулы изобретения.
Предполагается, что все прилагаемые пункты формулы изобретения являются неотъемлемой частью настоящего описания.
Очевидно, что возможны варианты и модификации (например, относящиеся к форме, размерам, компоновкам и деталям с эквивалентной функцией), но в пределах объема изобретения, изложенного в прилагаемой формуле изобретения.
Изобретение будет описано в виде предпочтительных вариантов его осуществления, которые представлены в качестве неограничивающих примеров, со ссылкой на прилагаемые чертежи, на которых:
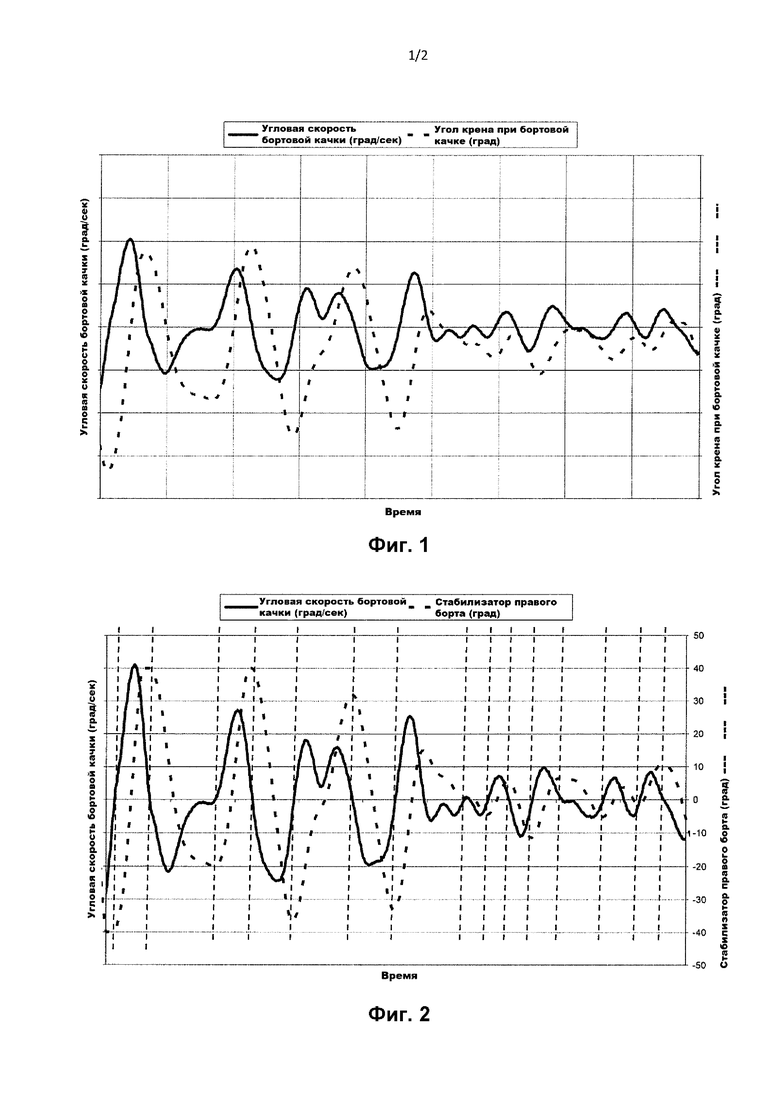
фиг. 1 - график зависимости от времени характера изменения угловой скорости бортовой качки и угла крена при бортовой качке при нулевой или малой скорости судна согласно данному изобретению;
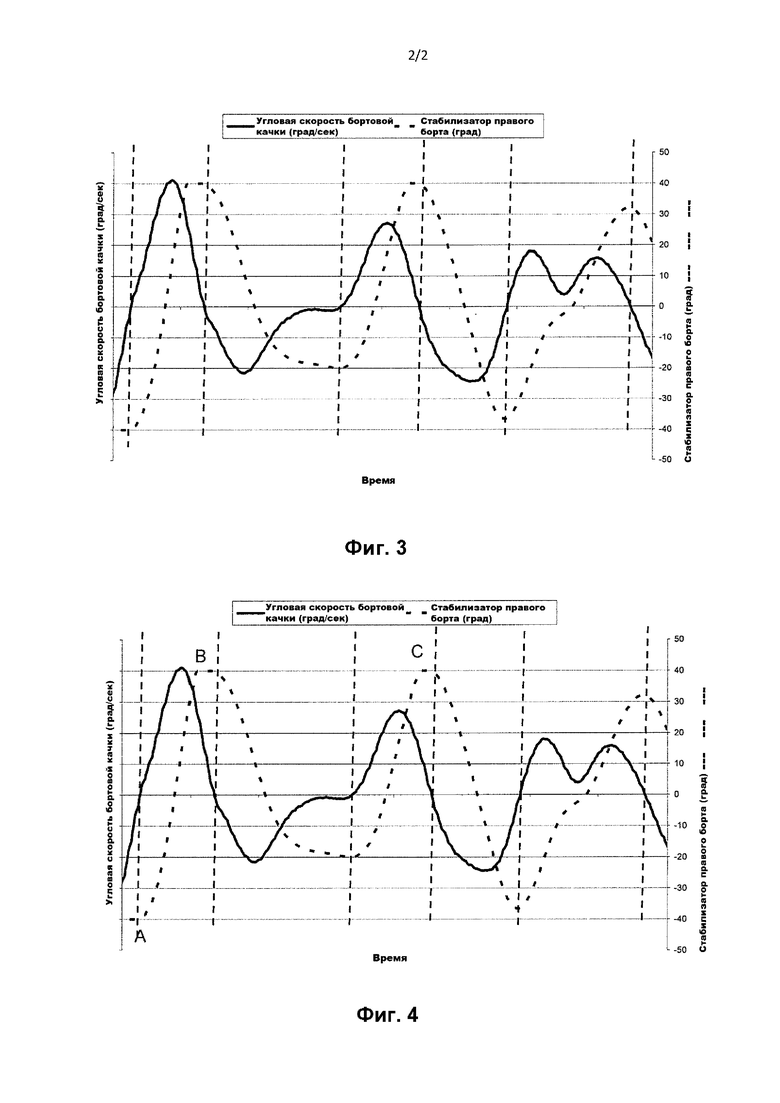
фиг. 2 - график зависимости от времени характера изменения угловой скорости бортовой качки и угла наклона стабилизатора правого борта согласно данному изобретению;
фиг. 3 - увеличенная часть графика зависимости от времени с предыдущей фигуры; и
фиг. 4 - увеличенная часть графика зависимости от времени, относящаяся к части способа, где существует ограничение максимального угла наклона стабилизатора.
Как видно на чертежах, способ управления бортовой качкой судна, при нулевой или малой скорости судна, с помощью по меньшей мере одного стабилизатора, включает следующие этапы:
a) приведение в движение стабилизатора с началом бортовой качки;
b) применение закона движения стабилизатора в зависимости от скорости бортовой качки;
c) прекращение движения стабилизатора по окончании бортовой качки.
В частности, движение стабилизатора останавливают практически в любом положении, достигнутом стабилизатором.
В качестве неограничивающего примера, стабилизатор перемещают со скоростью, пропорциональной угловой скорости бортовой качки, чтобы можно было создавать стабилизирующий момент, плавный и противоположный бортовой качке.
Почти при нулевой угловой скорости бортовой качки стабилизатор немедленно останавливается и сохраняет достигнутое положение, каким бы это положение ни было.
При ненулевой угловой скорости бортовой качки, стабилизатор снова начинает двигаться, начиная с положения, достигнутого в предыдущем цикле, для управления бортовой качкой судна.
Закон движения стабилизатора имеет непрерывный характер.
В предпочтительном варианте движение стабилизатора является колебательным относительно оси вращения.
При достижении максимального угла наклона стабилизатор остается неподвижным до тех пор, пока угловая скорость бортовой качки не изменит направление, чтобы затем иметь возможность начать движение в противоположном направлении.
В предпочтительном варианте такой способ может быть применен, например, к таким устройствам как стабилизаторы, системы с эффектом Магнуса, гироскопы, подвижные массы, активные маятники, коробки с вытеснением жидкости, внешние коробки, помещенные в воду, стабилизаторы бортовой качки с применением руля, стабилизаторы бортовой качки с применением азимутального гребного винта или тяги. Согласно известному уровню техники все эти устройства приводятся в действие при нулевой или почти нулевой бортовой качке.
Кроме того, такой способ может быть применен для управления успокоением килевой качки при стоянии судна на якоре или движении с малой скоростью.
Предлагаемый способ управления бортовой качкой при нулевой или малой скорости судна дает возможность достигать заявленных целей.
Максимальное демпфирование бортовой качки и наилучший комфорт достигаются, если стабилизатор начинает двигаться, когда начинается бортовая качка, и если стабилизатор будет продолжать двигаться в зависимости от угловой скорости бортовой качки, не только при максимальной угловой скорости бортовой качки, при нулевой или почти нулевой бортовой качке, или точки равновесия, а всегда, когда происходит бортовая качка и ее угловая скорость не равна нулю.
Согласно предлагаемому способу стабилизатор перемещается, если угловая скорость бортовой качки судна не равна нулю. В частности, стабилизатор движется со скоростью поворота, зависящей от угловой скорости бортовой качки судна. Следовательно, если бортовой качки, развиваемой стабилизатором, достаточно, или начальный угол крена при бортовой качке достаточно мал, движение стабилизатора способно остановить угол крена судна при бортовой качке на нуле или в точке устойчивого равновесия бортовой качки. Стабилизатор блокируется под достигнутым углом, когда угловая скорость бортовой качки равна нулю, постоянный угол крена при бортовой качке. Поскольку нулевой угол крена при бортовой качке - это положение устойчивого равновесия, судно остается в этом состоянии до тех пор, пока внешние моменты крена не переместят его. Кроме того, движение стабилизаторов наряду с бортовой качкой, в зависимости от угловой скорости бортовой качки, обеспечивает работу стабилизаторов, которая не создает толчков, что является преимуществом, обеспечивающим комфорт.
Предлагаемый способ дает возможность останавливать судно в точке его устойчивого равновесия, устраняя необходимость последующих колебаний.
Успокоение бортовой качки при нулевой скорости судна, когда судно стоит на якоре, достигаемое при помощи стабилизаторов, которые движутся со скоростью поворота, пропорциональной угловой скорости бортовой качки судна, дает возможность демпфирования бортовой качки, которое больше демпфирования, обеспечиваемого другими используемыми в настоящее время способами, и с меньшей рабочей нагрузкой на стабилизаторы. Кроме того, нет никаких неприятных поперечных толчков, неприятных рывков, которые присутствуют в системах «релейного» перемещения или перемещения «толчками», и во всех способах, приводящих в действие стабилизаторы, при нулевой или почти нулевой бортовой качке. Во избежание возникновения этих неприятных поперечных толчков «релейные» системы должны ограничивать управляющее воздействие, что приводит к более низкому демпфированию бортовой качки по сравнению с тем, которое можно получить при том же количестве стабилизаторов, или увеличению размера установленных стабилизаторов, чтобы уменьшить необходимость их перемещения.
Предлагаемый способ применяется для успокоения бортовой качки судов при нулевой или малой скорости судна. Тем не менее этот способ может быть применим в целом для любой поверхности или устройства, которое использует компоненты крыла, такие как стабилизаторы, стабилизаторы, совершающие маховые движения (компании DMS), и системы с эффектом Магнуса.
Предлагаемый способ аналитически поддерживается следующим математическим алгоритмом.
Дано:
δƒin(t) - угол стабилизатора во времени,
p(t) - угловая скорость бортовой качки судна,
functionOf (p(t) - нелинейная функция угловой скорости бортовой качки, и
Kp - коэффициент усиления,
элемент управления бортовой качкой, когда судно стоит на якоре или двигается с малой скоростью, представляет собой:

который в самом простом варианте осуществления, но тем не менее исключительно эффективном, пропорционален угловой скорости бортовой качки за счет коэффициента усиления:

Скорость приведения в действие стабилизатора пропорциональна, или является нелинейной функцией, угловой скорости бортовой качки. Сила, развиваемая стабилизатором, зависит от его скорости поворота. Следовательно, поскольку судно имеет ненулевую угловую скорость бортовой качки, стабилизатор поворачивается, создавая бортовую качку, которая противодействует бортовой качке судна. Когда угловая скорость бортовой качки судна равна нулю, стабилизаторы остаются на достигнутом значении (постоянном значении), ожидая возобновления движения, чтобы противодействовать бортовой качке. Стабилизаторы могут быть остановлены в ненулевом положении, даже разном для каждого стабилизатора, если ими управляют раздельно. Движение стабилизаторов с ненулевым средним значением является характерной особенностью предлагаемого способа.
Кроме того, коэффициент усиления Kp может быть просто коэффициентом или может быть определен более сложным способом в зависимости от состояния моря, ширины бортовой качки, максимальной скорости стабилизатора, хода стабилизатора, подъема стабилизатора или других показателей окружающей среды или комфорта.
Обычно стабилизатор приводится в движение под углом. Эквивалентная форма, позволяющая получить угол стабилизатора, представляет собой:

Пределы интегрирования представляют собой максимальное и минимальное значения стабилизаторов. Когда угловая скорость бортовой качки равна нулю, угол крена при бортовой качке уравновешен, или является максимальным или минимальным, стабилизатор останавливается и снова начинает двигаться, когда судно снова подвергается бортовой качке.

Закон регулирования (4) позволяет получить максимальные уровни демпфирования бортовой качки при том же размере стабилизатора. Такое состояние имеет непрерывный характер, а именно, не «релейное» перемещение и не перемещение «толчками», и исключает любой гидродинамический рывок, который создает резкие ускорения бортовой качки, а именно поперечные ускорения, воспринимаемые пассажирами, которые находятся на различных палубах судна.
Применение движения стабилизатора при максимальной угловой скорости бортовой качки, как это делается в настоящее время, означает внезапное увеличение бортовой качки, которая искажает кривую угловой скорости в ее максимальной точке.
С другой стороны, применение непрерывного демпфирующего момента, начиная с малой угловой скорости бортовой качки, не создает такого явления и обеспечивает максимальный комфорт и максимальное демпфирование бортовой качки.
Кроме того, поскольку это непрерывное решение, то такой закон движения дает возможность демпфировать также небольшую бортовую качку, не оставляя неохваченной ни одну амплитуду бортовой качки. При наличии одинаковых стабилизаторов этот способ обеспечивает большее демпфирование бортовой качки, меньшую нагрузку на стабилизаторы и меньший износ всей системы. Оценка рабочей нагрузки на стабилизаторы для успокоения бортовой качки, когда судно стоит на якоре, должна выполняться с вычислением стандартного отклонения скорости стабилизатора, а не стандартного отклонения угла стабилизатора, как это обычно происходит.
При таком управлении также необходимо привыкать к кажущимся аномалиям в отношении того, что привыкли наблюдать.
Фактически, стабилизаторы могут быть остановлены под ненулевым углом, в соответствии с теми, которые находятся на одной и той же части корабля, и диаметрально противоположно, с противоположной стороны, когда их приводят в движение вместе. Если стабилизаторы приводятся в движение отдельно, чтобы учесть конкретные условия, каждый стабилизатор может принимать разные значения. Среднее значение стабилизатора при современных способах регулирования равно нулю, тогда как в предлагаемом способе стабилизаторы при успокоении, когда судно стоит на якоре или плывет с малой скоростью, могут останавливаться под любым углом и необязательно на нуле, когда бортовая качка принимает нулевое или равновесное значение.
Описанный элемент управления бортовой качкой эффективен, в частности, при успокоении, когда судно стоит на якоре, а также при малой скорости судна. Фактически, при малой скорости можно развить крутящий момент бортовой качки, способный уменьшить бортовую качку судна, когда подъем стабилизатора невелик из-за продвижения судна и классического подъема (по углу атаки).
Эквивалентным решением является перемещение стабилизаторов с зависимостью углового ускорения от углового ускорения бортовой качки.
Другим эквивалентным решением является учет относительного максимума, или минимума, угла крена при бортовой качке в течение полупериода и создание нового параметра управления: угла смещения от максимальной бортовой качки; или: угла смещения от минимальной бортовой качки. Это дает возможность получить регулятор в виде увеличения или уменьшения стабилизатора на величину, пропорциональную максимальному или минимальному углу бортовой качки. Необходимый угол стабилизатора равен величине искомого угла в точке относительного максимума, или минимума, бортовой качки, суммированной с разницей между мгновенным значением бортовой качки и относительным максимальным, или минимальным, значением бортовой качки, умноженной на Kp.
То есть от точки изменения крена на обратный, определенной в момент, когда это происходит, до следующей точки изменения крена на обратный, относительного максимума или относительного минимума, искомый угол стабилизатора равен:

где φ(t) - это угол крена при бортовой качке во времени.
Это решение, даже если оно теоретически эквивалентно, является более сложным для реализации. Реализация с интегралом угловой скорости бортовой качки очень проста и эффективна. Более того, ее можно использовать для определения коэффициента усиления в соответствии с методами разработки теории управления. Иногда, другая форма может быть предпочтительной по другим причинам: шум датчика крена ниже, чем интегральный шум угловой скорости бортовой качки, неинерциальный датчик крена, или интеграл угловой скорости бортовой качки целесообразен, когда датчик крена инерционен и угловая скорость бортовой качки особенно точна.
При этом способе успокоения малая бортовая качка больших судов демпфируется с высокими уровнями демпфирования, когда судно стоит на якоре, и, в частности, демпфирование увеличивается при уменьшении ширины угла крена при бортовой качке. В настоящее время системы успокоения качки при стоянии судна на якоре не способны уменьшать малую бортовую качку судна и, по сути, имеют затухание демпфирования при уменьшении угла крена, создавая явный парадокс: когда необходимы небольшие развитые силы, стабилизаторы менее способны демпфировать бортовую качку по сравнению с сильной бортовой качкой.
Это новшество дает возможность исключительно снизить колебания при малой бортовой качке, что особенно важно для больших судов. Для больших яхт малая бортовая качка является причиной серьезного снижения комфорта. Бортовое колебание всего на ±0,5° создает в боковом положении для корабля шириной 20 м вертикальное колебание более 17 см. Предлагаемый способ управления способен демпфировать на более чем 90%, благодаря его непрерывной функциональности. Это новшество позволяет демпфировать бортовую качку судна с небольшим периодом качки (до шести или семи секунд); на самом деле, при релейном способе демпфирование бортовой качки такого судна очень низкое или отрицательное.
Данный способ может быть применен для успокоения бортовой качки, когда судно стоит на якоре или двигается с малой скоростью, и для успокоения килевой качки, когда судно стоит на якоре или двигается с малой скоростью. Способ применим для всех устройств: стабилизаторов, закрылков, стабилизаторов, совершающих маховые движения (компания DMS), систем с эффектом Магнуса, гироскопов, подвижных масс, активных маятников, коробок с вытеснением жидкости, внешних коробок, помещенных в воду, при успокоении бортовой качки с помощью руля, при успокоении бортовой качки с помощью азимутального гребного винта или тяги.
Он применим для успокоения бортовой качки, килевой качки, толчков погруженных тел и плавучих платформ и может быть использован при любом регулировании, с помощью элемента управления «интеграл угловой скорости» рассматриваемой величины: интеграла угловой скорости бортовой качки, если регулируемая величина - это бортовая качка, интеграла угловой скорости килевой качки, если регулируемая величина - это килевая качка, интеграла скорости вертикальной качки, если регулируемая величина - это вертикальная качка.
При практической реализации необходимо учитывать также максимальную угловую скорость стабилизатора, MaxFinRate, или управления в целом и, возможно, максимальное угловое ускорение.
Формула реализации принимает вид:

для линейного решения:

Управление углом стабилизатора принимает вид:

Предлагаемый способ, реализованный с помощью вышеописанного алгоритма, дает возможность определить характер изменения угла поворота стабилизатора, аналогичного показанному на фиг. 2.
Как показано на фиг. 2, стабилизатор движется, когда угловая скорость бортовой качки не равна нулю. Вертикальные линии на фиг. 2, 3 и 4 показывают точку, в которой угловая скорость бортовой качки равна нулю и стабилизатор неподвижен. В этой точке, в описанном способе успокоения, стабилизатор начинает двигаться.
Предлагаемый данным изобретением способ относится к практическим вариантам осуществления с применением программного обеспечения, в случае использования компьютерных систем или программируемых логических контроллеров; аппаратного обеспечения, в случае использования систем с аналоговыми схемами; физических устройств в случае вариантов осуществления с помощью пневматических или механических регуляторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УМЕНЬШЕНИЯ КАЧКИ СУДНА | 2016 |
|
RU2738942C2 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ДВИЖЕНИЯ НАДВОДНОГО ОДНОКОРПУСНОГО ВОДОИЗМЕЩАЮЩЕГО БЫСТРОХОДНОГО СУДНА | 2013 |
|
RU2562086C2 |
| СПОСОБ КОНТРОЛЯ НЕПОТОПЛЯЕМОСТИ СУДНА | 1991 |
|
RU2016812C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 2019 |
|
RU2740617C1 |
| ТУРБОДИНАМИЧЕСКОЕ СУДНО В.С.ГРИГОРЧУКА | 1997 |
|
RU2128597C1 |
| Активный скуловой стабилизатор качки судна | 2019 |
|
RU2749820C2 |
| УНИВЕРСАЛЬНОЕ ТРАНСПОРТНОЕ СУДНО | 2015 |
|
RU2603709C1 |
| Стенд для моделирования бортовой и килевой качки судна | 1985 |
|
SU1244010A2 |
| Устройство для амортизирующего крепления надстройки к корпусу судна | 1986 |
|
SU1311998A1 |
| УСПОКОИТЕЛЬ КАЧКИ СКОРОСТНОГО СУДНА | 2011 |
|
RU2512078C2 |
Изобретение относится к способу управления бортовой и килевой качкой судна при нулевой или малой скорости судна. В частности, изобретение относится к способу определения положения стабилизаторов для уменьшения угла крена при бортовой качке и угла крена при килевой качке судна, стоящего на якоре с нулевой скоростью или плывущего с малой скоростью. Приводят в движение стабилизатор с началом бортовой качки. Применяют закон движения стабилизатора в зависимости от угловой скорости бортовой качки. Прекращают движение стабилизатора по окончании бортовой качки. Движение стабилизатора наряду с бортовой качкой, в зависимости от угловой скорости бортовой качки, обеспечивает работу стабилизатора, которая не создает толчков и рывков. Способ дает возможность останавливать судно в точке его устойчивого равновесия, устраняя необходимость последующих колебаний. Рассеивается энергия бортовой качки судна. 9 з.п. ф-лы, 4 ил.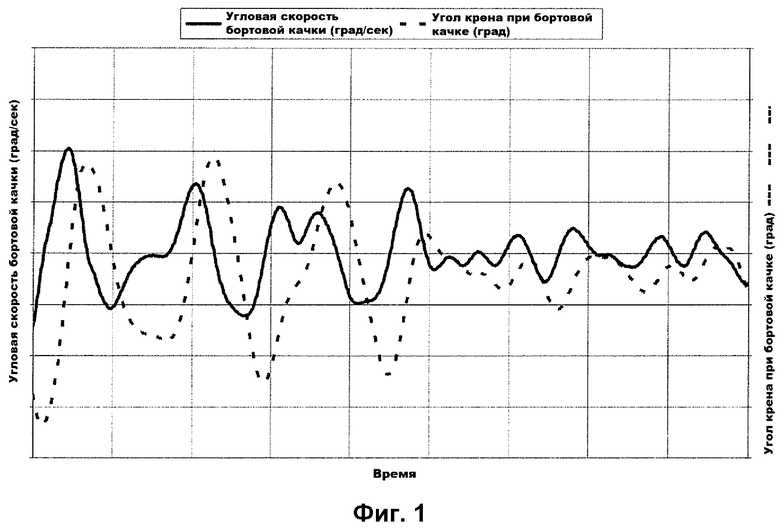
1. Способ управления бортовой качкой судна, при нулевой или малой скорости судна, при помощи по меньшей мере одного стабилизатора, отличающийся тем, что включает следующие этапы:
a) приведение в движение стабилизатора с началом бортовой качки;
b) применение закона движения стабилизатора в зависимости от угловой скорости бортовой качки;
c) прекращение движения стабилизатора по окончании бортовой качки;
причем движение стабилизатора наряду с бортовой качкой, в зависимости от угловой скорости бортовой качки, обеспечивает работу стабилизатора, которая не создает толчков и рывков, и
причем способ дает возможность останавливать судно в точке его устойчивого равновесия, устраняя необходимость последующих колебаний.
2. Способ управления бортовой качкой судна по предыдущему пункту, отличающийся тем, что движение стабилизатора прекращают в любом положении, достигнутом стабилизатором.
3. Способ управления бортовой качкой судна по предыдущему пункту, отличающийся тем, что стабилизатор перемещается со скоростью, пропорциональной угловой скорости бортовой качки, для создания плавного успокаивающего движения, противодействующего бортовой качке.
4. Способ управления бортовой качкой судна по предыдущему пункту, отличающийся тем, что при нулевой угловой скорости бортовой качки стабилизатор мгновенно останавливается и сохраняет достигнутое положение, каким бы это положение ни было.
5. Способ управления бортовой качкой судна по предыдущему пункту, отличающийся тем, что при ненулевой угловой скорости бортовой качки стабилизатор снова начинает двигаться, начиная с положения, достигнутого в предыдущем цикле, для управления бортовой качкой судна.
6. Способ управления бортовой качкой судна по любому из предыдущих пунктов, отличающийся тем, что закон движения стабилизатора имеет непрерывный характер.
7. Способ управления бортовой качкой судна по любому из предыдущих пунктов, отличающийся тем, что движение стабилизатора является колебательным относительно оси вращения.
8. Способ управления бортовой качкой судна по предыдущему пункту, отличающийся тем, что при достижении максимального угла наклона стабилизатор остается неподвижным до тех пор, пока угловая скорость бортовой качки не изменит направление, чтобы затем иметь возможность начать движение в противоположном направлении.
9. Способ управления бортовой качкой судна по любому из предыдущих пунктов, отличающийся тем, что он применим к таким устройствам, как стабилизаторы, системы с эффектом Магнуса, гироскопы, подвижные массы, активные маятники, коробки с вытеснением жидкости, внешние коробки, помещенные в воду, стабилизаторы бортовой качки с применением руля, стабилизаторы бортовой качки с применением азимутального гребного винта или тяги.
10. Способ управления бортовой качкой судна по любому из предыдущих пунктов, отличающийся тем, что он может быть применен для успокоения килевой качки при нулевой или малой скорости судна.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

