Изобретение относится к судостроению, а именно к проектированию и исследованию оборудования и механизмов, работающих в условиях бортовой и килевой качки судна, и является дополнительным к авт. св. № 1150149.
Цель изобретения - повышение качества моделирования качки.
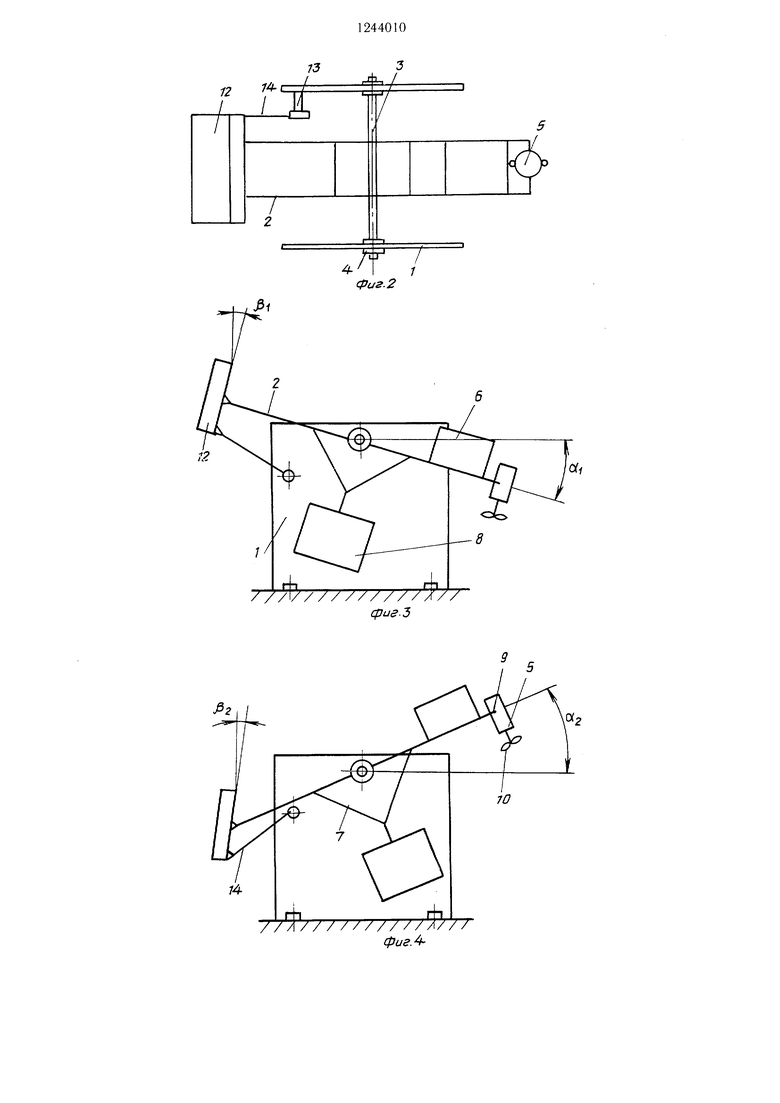
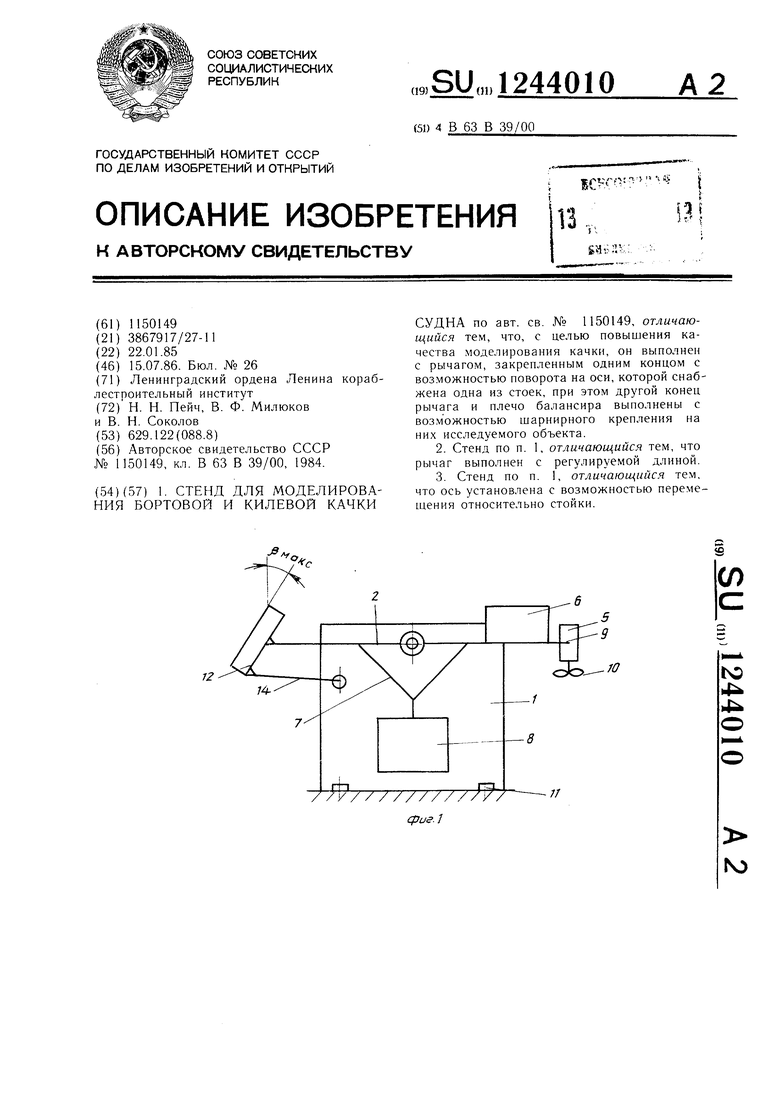
На фиг. 1 изображен стенд .моделирования бортовой и килевой качки судна, общий вид; на фиг. 2 - то же, вид в илане; на фиг. 3 - положение (условно) частей сте1гда при отклонении балансира на угол ai, где а.а-.:лкс; на фиг. 4 то же, при отклонении ба-лансира на угол а, где ач.1кс; на фиг. 5 - то же, при отклонении балансира на угол amakr; на фиг. б - стенд для моделирования только килевой качки, обн1ий ;1;д.
Степ. для моделирования бортовой и килевой качки судна (фиг. 1 и 2) содержит подвижно установленный на стойках I балансир 2, жестко сь-язанный с осью 3, концы которой установлены в пoднJипникax 4, размещенных в стойках 1. На одном из плечей балансира 2 установлен привод 5 и противовес 6. Нод осью 3 посредством растяжек 7 к балансиру 2 жестко присоединено твердое тело 8. Нривод 5 содержит электродвигатель 9, на валу которого закреплен пропеллер 10. Стойки 1 посредством анкерных бо.птов 1 1 соединены с фундаментом. На плече балансира 2 с воз.можностью поворота 1нарнирно закреплен исследуемый объект 12. }1а стойке 1 закреплена ось 13. Рычаг пере.мениой длины 14 щарнирно закреплен с возможностью поворота одним концом на исследуемом об ьекте 12, а другим- на оси 13.
Моделирование бортовой и килевой качки судна осу1иествляется следующим образом.
Перед началом испытаний, когда балансир находится в гю. южении статического равновесия, исследуемому объекту 12 при/дается максимальный угол Kficiia p-j.n-., который ие- об.ходимо получить IS процессе .моделирова- , выбирас си .iaкcи.мa;пJHЫй угол отклонения балансира 2 от положения статического равновесия а. Ось 13 закрепляется на стойке 1 в по.. 1ожении, соответ- ствуюн ем длине рычага 14, определенной по данным pMi K. м а-.мк. Включают элект- родвиг атель 9 привода 5, при этом нропел- ле) 10 вращается по часовой стрелке и создаст движущую силу, отклопяюц.|,ую балансир 2. исследуемый объект 12 и твердое тело 8 против часогюй стрелки вокруг оси 3, пока балаиси) не отклонится на некоторый угол О ; х;- а.;.п:... В ЭТОТ момент исследуемый объект 12 под воздействием рычага
s
0
5
0
0
5
0
14 приходит в положение с углом крена 0 ;р| Срмакс (фиг. 3). После этого производят переключение электродвигателя 9 привода 5, при этом пропеллер 10 начинает вращаться против часовой стрелки. Пропеллер 10 создает движущую силу, отклоняющую балансир 2, исследуемый объект 12 и твердое тело 8 против часовой стрелки, пока балансир не отклонится на угол К1 ;сс2 амакс. Это происходит в результате дополнительного воздействия инерционных сил твердого тела 8. В .этот момент под воздействием рычага 14 исследуе.мый объект 12 оказывается накрененным на угол Pi (фиг. 4). Далее вновь переключается электродвигатель 9 привода 5, при этом пропеллер 10 вновь вращается по часовой стрелке. Под действием тех же сил балансир 2 отклоняется в другую сторону. Такое переключение привода 5 происходит до тех пор, пока балансир 2 не будет отклоняться в своих крайних положениях на заранее заданный угол a.v.aiic, при котором угол крена исследуемого 12 j6 0 (фиг. 5). В этот момент происходит отключение привода 5 и дальнейщее качательное движение балансира 2 происходит за счет инерционных сил твердог о тела 8, при этом качательное движение балансира 2 становится затухающим из-за действия сил трения в сочленениях и сил трения о воздух. Когда угол отклонения балансира 2 уменьщается до величины а амакс - Да, где Лес - допустимая заранее заданная величина затухания качатель- ного движения балансира I, вновь включают нривод 5 и раскачивают балансир 2.
При таком качательном движении балансира 2 пере.мещение исследуемого об ьекта 12 представляет собой совокупность двух пере- меп1.ений в пространстве: исследуе.мый об1;ект 12 совершает возвратно-поступательное пе- ремен.1.ение по вертикали, что соответствует перемещению судна на волне нри килевой качке, а исследуемый объект 12 1 ериоди- чески отклоняется от вертикали на угол Р«акс, что соответствует воздействию бортовой качки. Причем угол крена исследуемого об ьекта 12 становится макси.мальны.м при прохождении балансиром 2 положения статического равновесия и равным нулю, когда балансир 2 отклоняется на угол амакс, что соответствует воздействию бортовой и килевой качки на судно в реальных условиях.
Чтобы в процессе качки исследуемый объект 12 мог отклониться на другой максимальный угол от вертикали, измепяют длину рычага 14 и перемещают ось 13 в соответствующее положение на стойке 1.
При моделировании только килевой качки ось 13 устанав;1ивают на стойке 1 в верти- ка;1ьной плоскости, проходя1цей через ось 3.
12
74-,
li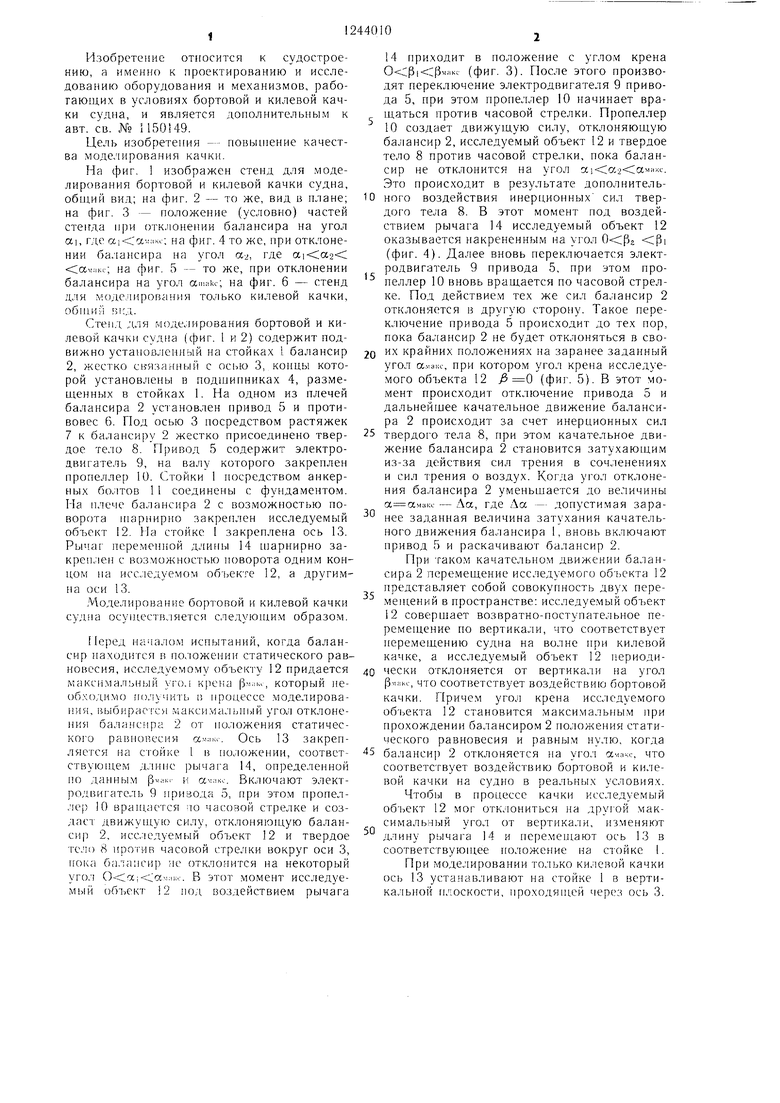
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для моделирования бортовой и килевой качки судна | 1983 |
|
SU1150149A1 |
| Стенд для моделирования бортовой и килевой качки судна | 1989 |
|
SU1646946A2 |
| АКТИВНЫЙ СТАБИЛИЗАТОР КИЛЕВОЙ И БОРТОВОЙ КАЧКИ КОРАБЛЯ - ШТОРМОВОЙ АВАРИЙНЫЙ ДВИЖИТЕЛЬ | 2008 |
|
RU2384457C2 |
| СПОСОБ УМЕНЬШЕНИЯ КАЧКИ СУДНА | 2016 |
|
RU2738942C2 |
| САМОСТАБИЛИЗИРУЮЩЕЕСЯ УСТРОЙСТВО ДЛЯ АНТЕННЫХ ПОСТОВ И ПРИБОРОВ СУДОВОЙ РАДИОЭЛЕКТРОННОЙ АППАРАТУРЫ | 2001 |
|
RU2204873C1 |
| Установка для моделирования качки и вибрации судов | 1972 |
|
SU516930A1 |
| УСТРОЙСТВО ДЛЯ УМЕРЕНИЯ БОРТОВОЙ КАЧКИ МОРСКИХ СУДОВ С БОЛЬШОЙ ПОПЕРЕЧНОЙ ОСТОЙЧИВОСТЬЮ | 2006 |
|
RU2374124C2 |
| Устройство для амортизирующего крепления надстройки к корпусу судна | 1986 |
|
SU1311998A1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ДВИЖЕНИЯ НАДВОДНОГО ОДНОКОРПУСНОГО ВОДОИЗМЕЩАЮЩЕГО БЫСТРОХОДНОГО СУДНА | 2013 |
|
RU2562086C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СИЛ ПРИСОЕДИНЕННОЙ ИНЕРЦИИ И ДЕМПФИРОВАНИЯ ТЕЛ МЕТОДАМИ ИХ СВОБОДНЫХ ЗАТУХАЮЩИХ КОЛЕБАНИЙ В ЖИДКОСТИ | 2009 |
|
RU2425344C1 |
Л /
///V/////////Л// фие.5
//Л///////7//и/// i/./77
фиг. 6
| Стенд для моделирования бортовой и килевой качки судна | 1983 |
|
SU1150149A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
