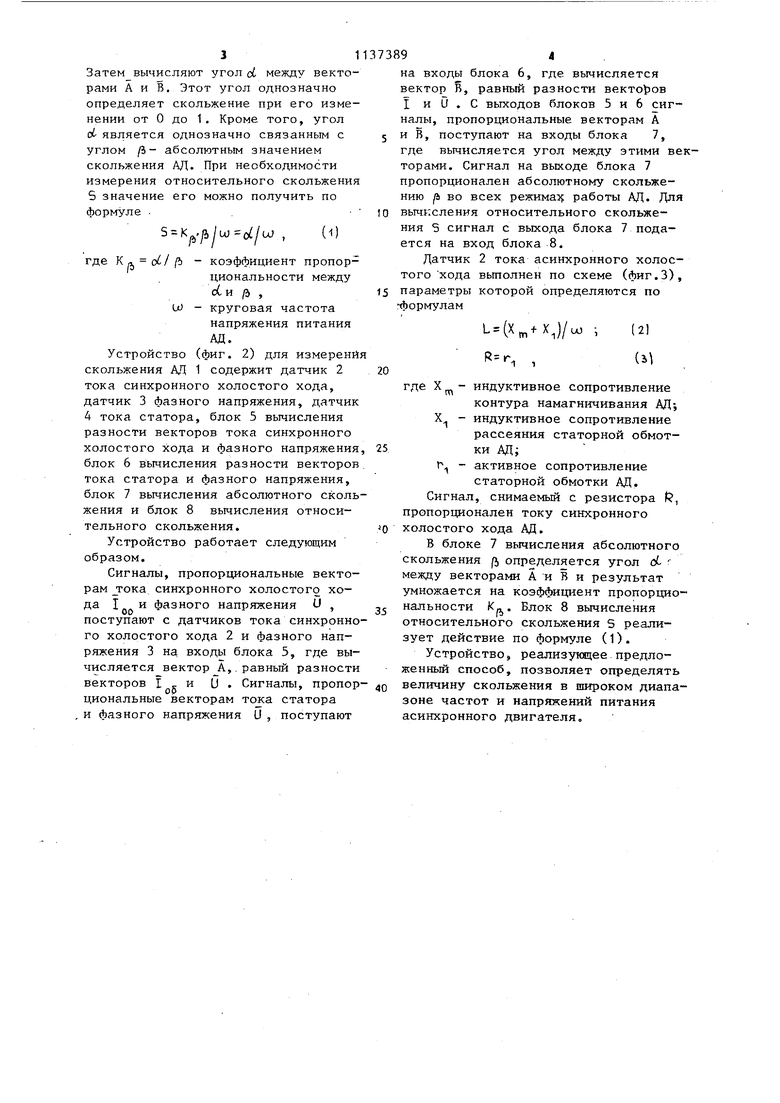
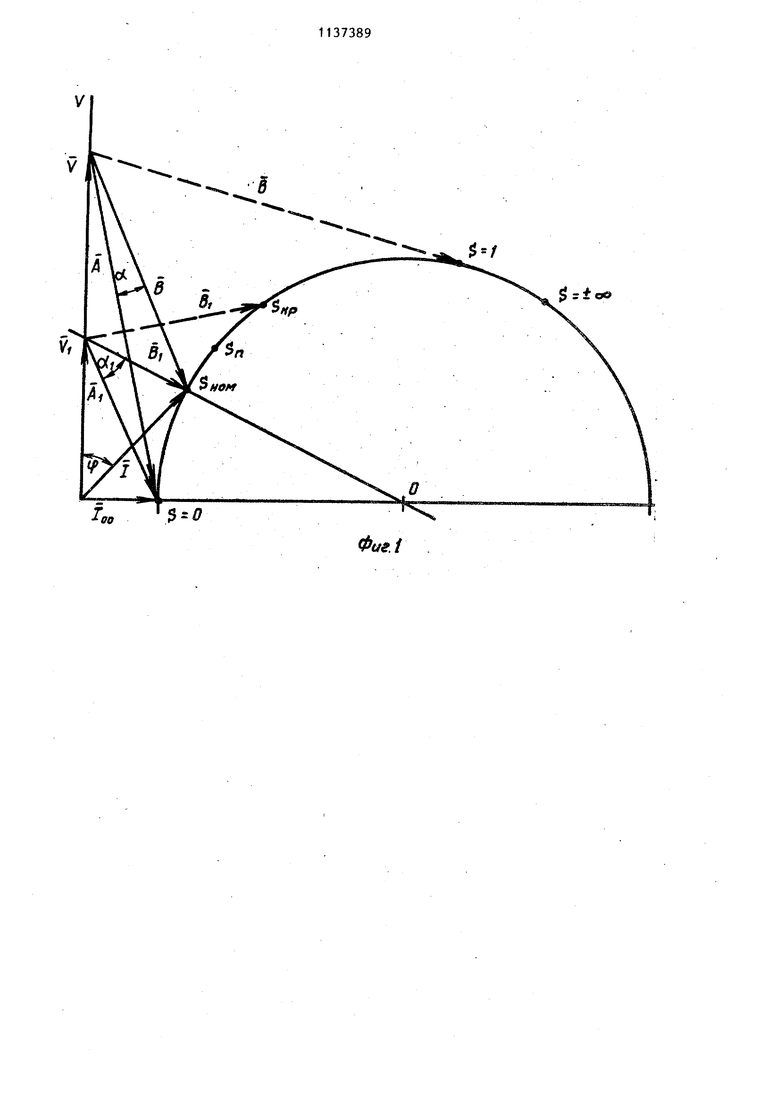
Изобретение относится к контроль но-измерительной технике и может быть использовано для получения информации о величине скольжения упра ляемого асинхронного электродвигателя . Известен способ измерения сколь жения асинхронного двигателя, согласно которому измеряют пульсации электромагнитного поля статора и анализируют ролученный сигнал на по лосовых частотных фильтрах, а устройство для реализации указанного способа содержит датчик пульсаций магнитного поля и ряд частотных фильтров Недостатком известных способа и устройства, его реализующего, является низкая точность измерения скол жения при питании двигателя от ис- . точника с несинусоидальной формой выходного напряжения. Наиболее близким к изобретению п технической сущности и достигаемому результату является способ, реализованный устройством, в котором информацию о скольжении асинхронного электродвигателя получают с датчиков напряжения и тока статора и далее на вычислительном блоке получают значение скольжения. Устройство, реализующее указаниьй способ, содержит датчики напряжения и тока статора, подключенные к входам преобразователя, блок деления, один из входов которого подключен к выходу датчика тока,блок вычитания, входы которого подключены к выходу, датчика тока и выходу преобразователя, а выход - квторому входу блока деления, при этом преобразователь выполнен в виде двух квадраторов, выходы которых подключены к сумматору, а выход сумматора соединен с выходом блока извлечения квадратного корня 2 Недостатком известных способа и устройства, его реализующего, является низкая точность при отключении частоты питания от номинального значения. Целью изобретения является повышение точности измерения.во всем диапазоне измерения скольжения, частоты и амплитуды напряжения питания электродвигателя. Поставленная цель достигается тем, что согласно способу измерения скольжения многофазного асинхронного электродвигателя измеряют напряжение и ток статора, и ток синхронного холостого хода, определяют скольжение путем вычисления угла между вектором, равным разности векторов тока синхронного холостого хода и фазного напряжения, и вектором, равнь м разности векторов тока статора и фазного напряжения. Устройство, реализующее предложенный способ, содержит датчики ,напряжения и тока статора, дополнительный датчик тока синхронного холостого хода, первый блок вычисления разности между векторами тока синхронного холостого хода и фазного напряжения, второй блок вычисления разности между векторами тока статора и фазного напряжения, блок вычисления абсолютного скольжения и блок вычисления относительного скольжения, причем вход блока вычисления относительного скольжения подключен к выходу блока вычисления абсолютного скольжения, первый вход которого подключен к выходу первого блока вычисления разности между векторами тока синхронного холостого хода и фазного напряжения, а второй вход подключен к выходу второго блока вычисления разности между векторами тока статора и фазного напряжения, первый вход которого подключен к выходу датчика тока статора, а второй - к выходу датчика фазного напряжения, причем второй вход первого блока вычисления разности между векторами тока синхронного холостого хода и фазного напряжения подключен к выходу датчика напряжения, а первьй вход подключен к выходу датчика тока синхронного холостого хода, вход которого подключен к фазному напряжению двигателя. На фиг. 1 приведена круговая диаграмма асинхронного двигателя (АД), поясням ая предлагаемый способ; на фиг. 2 - блок-схема устройства, реализующего способ; на фиг, 3 - схема датчика тока синхронного холостого хода. Предложенный способ карактеризу-. ется следующей последовательностью операций. Определяют вектор А (фиг, 1) как разность между векторами тока синхронного холостого хоа I об и фазного напряжения О . дновременно определяют вектор В как разность между векторами тока статора I и фазного напряжения О 3 Затем вычисляют угол ci между векторами А и В. Этот угол однозначно определяет скольжение при его изменении от О до 1. Кроме того, угол oi является однозначно связанным с углом /i - абсолютным значением скольжения АД. При необходимости измерения относительного скольжения 5 значение его можно получить по формуле . 5 , (1) где К ,1 - коэффициент пропорциональности между d,ii 1Ь , U) - круговая частота напряжения питания АД. Устройство (фиг. 2) для измерени скольжения АД 1 содержит датчик 2 тока синхронного холостого хода, датчик 3 фазного напряжения, датчик 4 тока статора, блок 5 вычисления разности векторов тока синхронного холостого хода и фазного напряжения блок 6 вычисления разности векторов тока статора и фазного напряжения, блок 7 вычисления абсолютного сколь жения и блок 8 вычисления относительного скольжения. Устройство работает следующим образом. Сигналы, пропорциональные векторам тока синхронного холостого хода I и фазного напряжения U , поступают с датчиков тока синхронн го холостого хода 2 и фазного напряжения 3 на входы блока 5, где вычисляется вектор А,-равный разности векторов I 5 и О . Сигналы, пропо циональные векторам статора и фазного напряжения U, поступают 94 на входы блока 6, где вычисляется вектор В, равный разности векторов I и О . С выходов блоков 5 и 6 сигналы, пропорциональные векторам А и В, поступают на входы блока 7, где вычисляется угол между этими векторами. Сигнал на выходе блока 7 пропорционален абсолютному скольжению PI во всех режимам работы АД. Для вычисления относительного скольжения S сигнал с выхода блока 7 подается на вход блока 8. Датчик 2 тока асинхронного холостого хода вьтолнен по схеме (фиг.З), параметры которой определяются по Лормулам - (2} где X - индуктивное сопротивление контура намагничивания АД; Х - индуктивное сопротивление рассеяния статорной обмотки АД; г - активное сопротивление статорной обмотки АД. Сигнал, снимаемый с резистора (, пропорционален току синхронного холостого хода АД. В блоке 7 вычисления абсолютного скольжения J определяется угол d между векторами А и В и результат умножается на коэффициент пропорциональности К„. Блок 8 вычисления относительного скольжения S реализует действие по формуле (1). Устройство, реализующее предложенный способ, позволяет определять величину скольжения в широком диапазоне частот и напряжений питания асинхронного двигателя. Фиг. t $:±os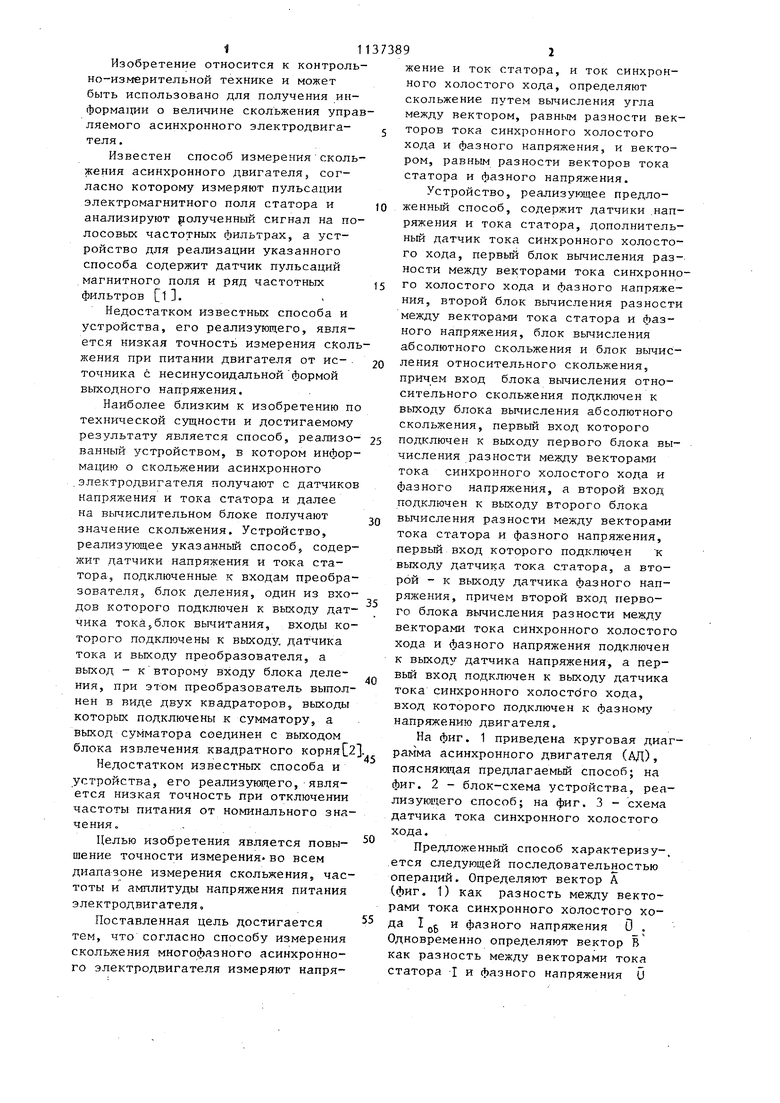
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ТЯГОВЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2451389C1 |
| СПОСОБ ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2016 |
|
RU2626325C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Асинхронный электропривод | 1990 |
|
SU1767690A1 |
| Электропривод переменного тока | 1987 |
|
SU1534735A1 |
| СПОСОБ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2000 |
|
RU2164053C1 |
| Электропривод переменного тока | 1981 |
|
SU1026272A1 |
| СПОСОБ ОЦЕНКИ РЕГУЛИРУЕМЫХ СИГНАЛОВ ТРЕХФАЗНОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 1998 |
|
RU2158472C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭДС РОТОРА СИНХРОННЫХ И ТОКА РОТОРА АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ (ЕГО ВАРИАНТЫ) | 2001 |
|
RU2207578C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2012 |
|
RU2528612C2 |
1. Способ измерения скольжения многофазного асинхронного электро двигателя, включаншщй измерения напряжения и тока статора и вычисление значения скольжения, отличающийся тем, что, с целью новыше;НИя точности измерения во всем диа- . пазоне изменения скольжения, частоты h амплитуды напряжения питания двигателя, допол1штельно измеряют ток синхронного холостого хода, а скольжение определяют путем вычисления угла между вектором, равным разности векторов тока синхронного холостого хрда и фазного напряжения, и вектором, равным разности векторов тока статора и фазного напряжения. 2 о Устройство для измерения сколь™ жения шогофазного асинхронного двигателя, содержащее дат4ики напряжения истока статора, отличающееся тем, что, с целью повьппе™ ния точности измерения во всем диапазоне изменения скольжения, частоты и амплитуды напряжения питания двигателя, в устройство введены датчик тока синхронного холостого хода, первый блок вычисления разности между векторами тока синхронного холостого хода и фазного напряжения, второй блок вычисления разности между векторами тока статора и фазного напряжения5 блок ввиисления абсолютного скольжения и блок вычисления относительного скольжения, причем вход блока вычисления относительного скольжения -подключен к выходу блока вычисления абсолютного скольжения первый вход которого подключен к выходу первого блока вычисления разности, между векторами тока :синхронного холостого хода и фазного напряжения, а второй вход подключен к выходу второго блока вычисления разности между векторами тока статора, и фазного напряокения, первый вход которого подключен к выходу датчика тока статора, а второй - к Ьыходу датчика фазного напС ряжения, причем второй вход первого блока вычисления разности между векторами тока синхронного холостого хода и фазного напряжения подключен iK выходу датчика фазного напряжения, «fe-. а первый вход подключен к выходу датчика тока синхронного холосгого хода, вход которого подключен к фазному напряжению двигателя.
Фи9,3
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ВРАЩЕНИЯ РОТОРА ГЕРМЕТИЧНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 0 |
|
SU173486A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приводный механизм в судовой турбинной установке с зубчатой передачей | 1925 |
|
SU1965A1 |
| Устройство для измерения скольженияАСиНХРОННОгО дВигАТЕля | 1979 |
|
SU800881A1 |
