Область техники, к которой относится изобретение
Изобретение относится к дистанционным способам обнаружения и оценки скорости, высоты, местоположения и типа объектов в выделенной зоне подстилающей поверхности. Предназначено для следующих технических применений:
- в системе ситуационного контроля состояния железнодорожного переезда;
- в системе охраны выделенной зоны подстилающей поверхности и размещенных на ней объектов (контроль складских помещений);
- в системе детального трафика участка автомобильной трассы с возможностью раздельного мониторинга «большегрузов» и легкового автотранспорта.
Уровень техники
Известен способ дистанционного обнаружения остановившихся объектов автотранспорта (патент RU 2348055 опубл. 27.02.2009). При дистанционном обнаружении производят поочередное измерение уровня отраженных от области наблюдения сигналов при отсутствии и при наличии остановившихся объектов и находят их разность, отличие которой от нулевого значения в интервале времени, большем необходимого для пересечения области наблюдения, определяет факт присутствия в ней объекта. В качестве источника отраженного сигнала используют тепловое излучение неба, а прием отраженных сигналов осуществляют радиометрическим методом. Отраженные сигналы принимают из двух областей различной площади на поверхности земли, границы которых образуют сечения поверхностью земли диаграмм направленности антенной системы принимающего устройства, одинаково ориентированных относительно области неба, являющейся источником сигнала, и совмещенных центрами, большая из которых представляет собой область контроля за стабильностью уровня сигнала, определяемой флуктуациями теплового излучения неба, а меньшая совпадает с областью наблюдения.
Недостатком способа является отсутствие оценки характеристик объектов (скорости, габаритов, плотности), позволяющих классифицировать их по степени тяжести последствий в случае столкновения с ними (например, при остановке объекта на железнодорожном переезде).
Известна система ситуационного контроля состояния переезда (Железнодорожный транспорт №6 2015 г., стр. 6-7, №10 2018 г., стр.27-28), в которой занятость переезда определяется при помощи СВЧ датчиков.
Аналогичное решение предлагается в работе https://cms8.fra.dot.gov/elibrary/radar-vehicle-detection-system-four-quadrant-gate-warning-systems-and-blocked-crossing, которое наиболее близко к заявляемому способу.
Основным недостатком указанных технических решений следующее обстоятельство: СВЧ датчики системы позволяют определить наличие объекта в зоне переезда и его скорость, но не его характеристики (габариты, включая высоту, плотность), определяющие опасность этого объекта для движущегося поезда. В силу этого имеют место:
- частое необоснованное срабатывание сигнализации при нахождении в контролируемой зоне объектов, которые могут быть либо быстро удалены (пешеход, домашнее животное и т.д), либо не представляют опасности для поезда (бумажный мусор, наметенная листва или снег и т.п.);
- невозможность раздельного мониторинга трафика «большегрузов» и легкового автотранспорта на выделенных участках автотрасс;
- невозможность непрерывного мониторинга сохранности габаритных грузов в складских помещениях и на открытых площадках.
Техническая задача направлена на создание способа позволяющего вести возможность раздельного мониторинга трафика «большегрузов» и легкового автотранспорта на выделенных участках автотрасс и непрерывный мониторинг сохранности габаритных грузов в складских помещениях и на открытых площадках.
Технический результат, решаемый предложенным решением заключается в повышении достоверности оценки сценария занятости выделенной зоны подстилающей поверхности.
Технический результат достигается за счет того, что в способе оценки сценария занятости выделенной зоны подстилающей поверхности, включающий радиолокационное обнаружение и оценку дальности объектов в ограниченном телесном угле наблюдения, согласно предложенному решению, осуществляют цикличное поочередное вертикальное радиолокационное зондирование N фрагментов подстилающей поверхности, совокупность которых образует выделенную зону, причем оценку высотно-отражательного рельефа (ВОР) выделенной зоны проводят с помощью электромагнитного и акустического сигналов, при этом производится периодическое сравнение текущих ВОР с ВОР пустой выделенной зоны, а также взаимное сравнение текущих ВОР, по результатам сравнения производят пороговое обнаружение и оценку координат объектов их скорости, ширины, длины, высоты и относительной плотности в выделенной зоне, причем оценку плотности производят по величине разности отражательной способности для электромагнитного и акустического сигналов, оценка скорости объектов производится по результатам изменения ВОР на временном интервале нескольких периодов Т.
Краткое описание чертежей
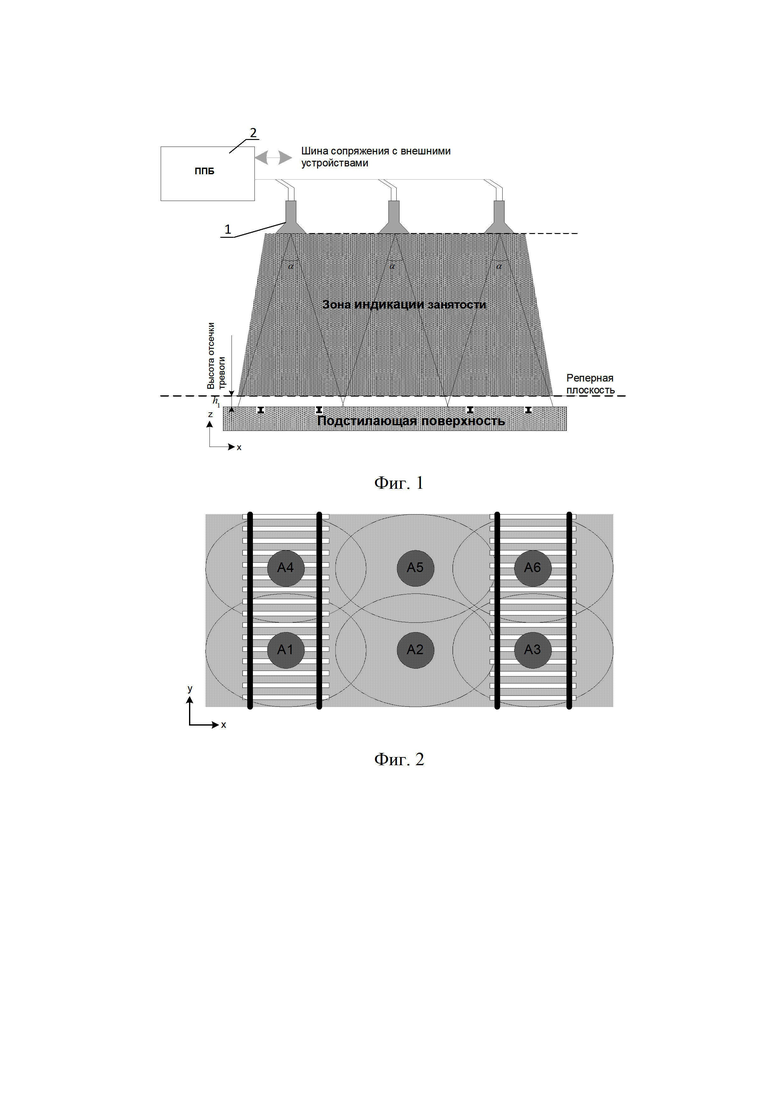
Суть способа отображена на фиг. 1 и фиг. 2, где схематично изображена система, реализующая заявляемый способ.
На фиг. 1 показано размещение приемо-передающих антенн Ai системы над зоной железнодорожного проезда переезда и ориентация их диаграмм направленности (ДН) относительно выделенной зоны.
На фиг. 2 показан вид сверху на выделенную зону и расположение антенн Ai.
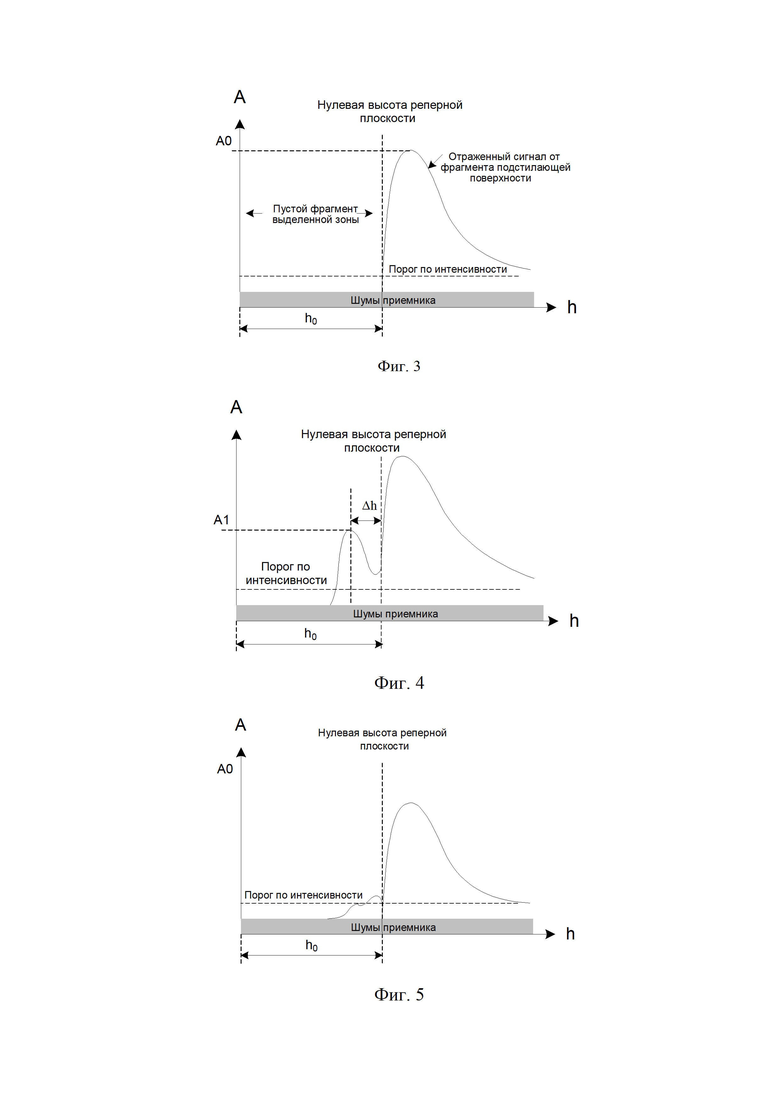
На фиг. 3 приведен ВОР пустого фрагмента выделенной зоны, на котором присутствует только отражение от подстилающей поверхности, расположенной на расстоянии  .
.
На фиг. 4 изображен ВОР этого же фрагмента, при размещении в нем объекта с высотой  и отражаемостью А1, которая отображается в амплитуде отраженного от объекта сигнала.
и отражаемостью А1, которая отображается в амплитуде отраженного от объекта сигнала.
На фиг. 5 и фиг. 6 показаны электромагнитный и акустический ВОР для объекта, высотой , изготовленного из пенопласта (куб, с высотой грани ).
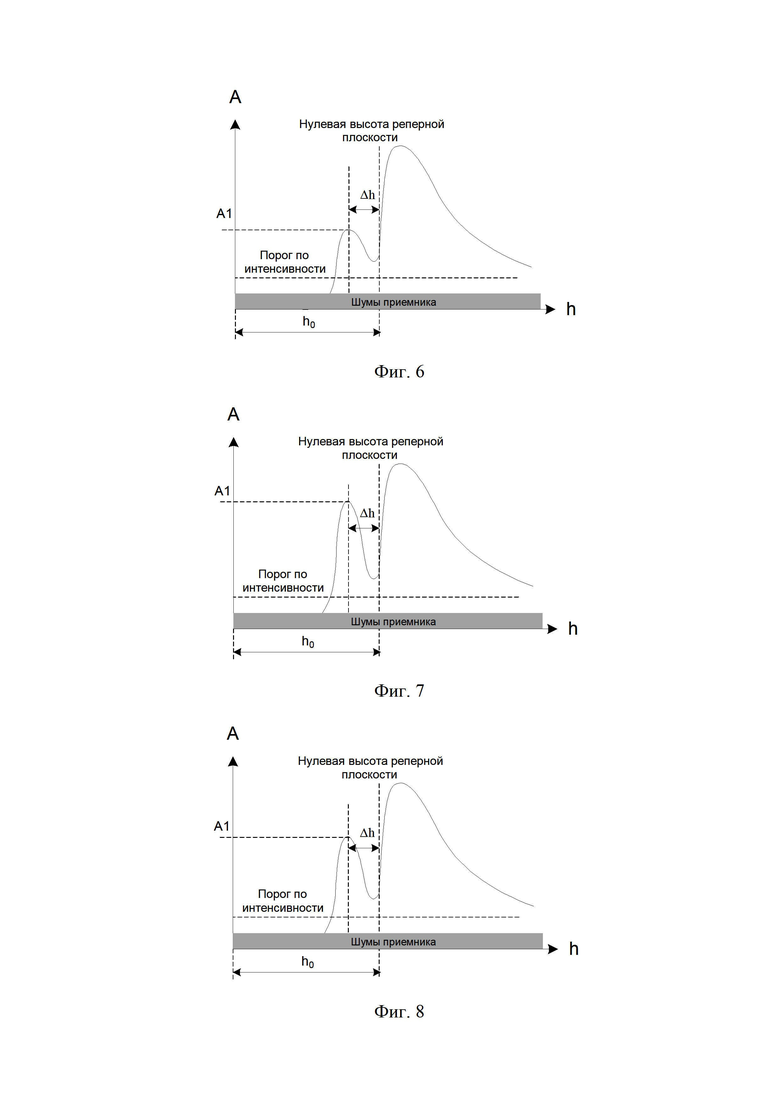
На фиг. 7 и фиг. 8 показаны электромагнитный и акустический ВОР для объекта, высотой , изготовленного из железобетона, идентичного по форме объекту из пенопласта.
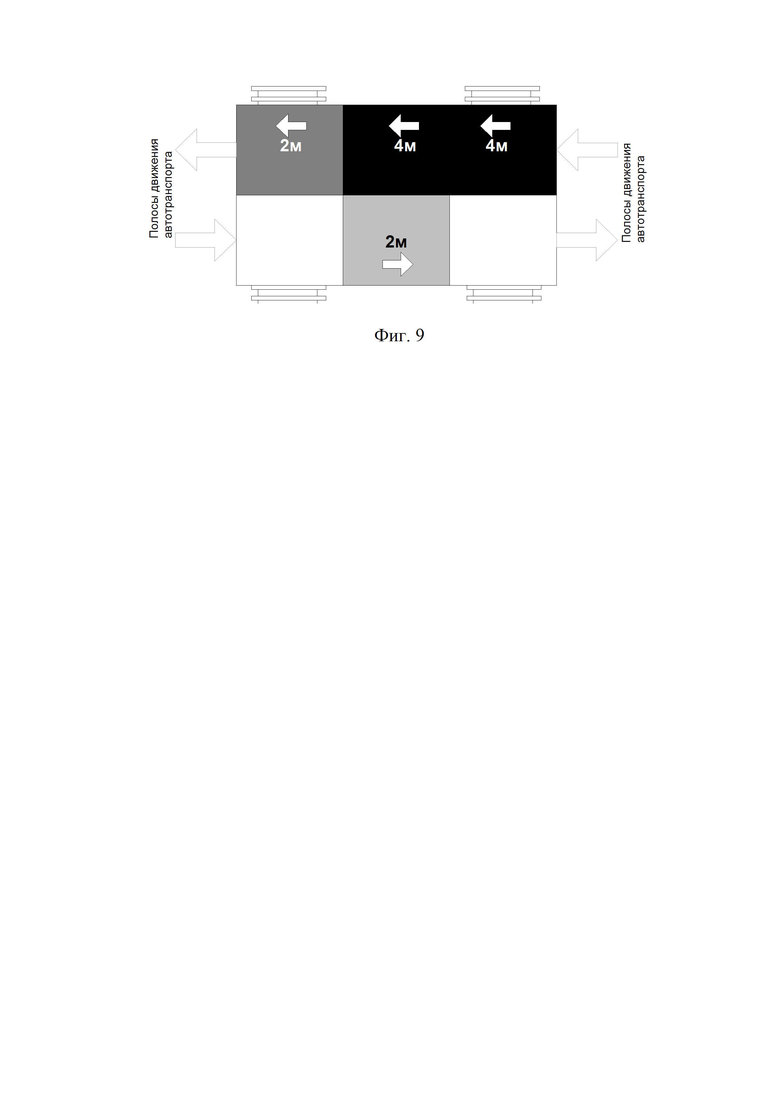
На фиг. 9 показан пример формуляра переезда, обновляемого с периодом цикла формирования ВОР зоны переезда.
Осуществление изобретения
Расположения ДН (фиг. 1, фиг. 2) каждого из излучателей «накрывает» фрагмент подстилающей поверхности, совокупность которых образуют выделенную зону, в данном случае ж.д. переезд. Количество антенн 1 определяется требованиями к точности оценки координат объектов, скорости и их габаритов. Чем больше антенн 1, тем точнее оценивается ВОР зоны, а следовательно, и характеристики объектов, расположенных в ней.
Антенны Ai могут излучать как электромагнитный, так и акустический сигнал (практически антенна Ai представляют собой совокупность рядом размещенных электромагнитной и акустической антенн с одинаковыми характеристиками направленности излучения и приема сигналов). Приемо-передающий блок 2 (ППБ) формирует сигналы излучения, свойства которых позволяют достичь необходимое разрешение объектов по высоте. Для электромагнитного зондирования применяли радиодальномер с ЛЧМ сигналом и его гомодинной обработкой. Для акустического зондирования применяли ультразвуковые излучатели, разработанные для контроля парковки автомобильного транспорта.
ППБ 2 во времени, периодически, с периодом Т, последовательно во времени возбуждает антенны Ai электромагнитным и акустическим сигналом. При этом последовательно во времени антенны Ai излучают и принимают сигнал независимо друг от друга. В результате зондирования для каждого из фрагментов выделенной зоны подстилающей поверхности измеряются электромагнитный и акустический ВОР, отображающие высоту объектов, расположенных во фрагменте (дальность объектов относительно антенны) и их отражательную способность (ЭПР) для электромагнитного и акустического сигналов, соответственно. Пример ВОР приведен на фиг. 3 и фиг. 4.
Электромагнитный и акустический ВОР отличаются для объектов разной плотности. На фиг. 5 и фиг. 6 показаны электромагнитный и акустический ВОР для объекта, высотой , изготовленного из пенопласта (куб, с высотой грани ).
Анализ фиг. 5-6 и фиг. 7-8 позволяет сделать следующий вывод: разница электромагнитного и акустического ВОР содержит информацию о плотности объекта. Для пенопластового объекта эта разница велика, для железобетонного объекта мала. Таким образом, совместная обработка электромагнитного и акустического ВОР позволяет оценить плотность объекта, а следовательно его тип. Наряду с возможностью оценки плотности объекта оценка акустического ВОР позволяет повысить вероятность обнаружения объектов, поглощающих падающую на них электромагнитную волну, поскольку если они обладают заметной плотностью, то эффективно отражают акустическую волну.
Координаты объекта определяются координатами фрагмента выделенной зоны, в котором он обнаружен, а скорость объекта изменением координат за время нескольких циклов формирования ВОР (временем перехода из фрагмента в фрагмент выделенной зоны).
Возможность оценки плотности объекта позволяет классифицировать их по степени опасности столкновения с ними транспортного средства (например, поезда).
Пример формуляра переезда, обновляемого с периодом цикла формирования ВОР зоны переезда представлен на фиг. 9.
Формуляр проезда представлен на фиг. 9. Зона переезда разбита на 6 фрагментов, степень затененности которых определяется плотностью объектов, расположенных в них. Для каждого объекта указано направление его движения и высота. Возможно дополнительное указание его скорости, хотя при цикле опроса несколько раз в секунду скорость перемещения объектов можно определять визуально. При таком отображении количество информации, необходимое для постоянной передачи формуляра минимально (необходимый трафик составляет десятки байт в секунду) и оно может быть передано в фоновом режиме по цифровым линиям связи РЖД. При этом каждый переезд идентифицирует себя координатами, что позволяет организовать автоматическую визуальную подачу формуляра переезда машинисту и системам торможения для реагирования на сценарий занятости переезда при приближении к нему.
Предложенное решение позволяет путем совместной обработки текущих ВОР (электромагнитного и акустического) и ВОР не занятой (пустой) зоны формировать информацию о сценарии занятости выделенной зоны, включающей габариты объектов (ширину, длину и высоту), расположенных в зоне, их скорости и направление движения, а также относительную плотность объектов.
Кроме того, технические затраты на реализацию предлагаемого способа ниже, чем затраты на реализацию прототипа, поскольку вместо многолучевых антенн используются простейшие рупорные антенны СВЧ, а стоимость акустических антенн также минимальна.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения состояния ледяного покрова | 2016 |
|
RU2635332C1 |
| Способ обработки цифрового радиолокационного сигнала и радиолокатор обнаружения препятствий высокого разрешения | 2022 |
|
RU2792971C1 |
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ЛЕДЯНОГО ПОКРОВА | 2010 |
|
RU2449326C2 |
| Радиоакустический способ зондирования атмосферы | 1989 |
|
SU1658105A1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОХРАНЫ ВОЗДУШНОГО ПЕРИМЕТРА | 2023 |
|
RU2824853C1 |
| СПОСОБ ПОДПОВЕРХНОСТНОГО ЗОНДИРОВАНИЯ | 2009 |
|
RU2393501C1 |
| Способ и система определения скорости локомотива и направления движения | 2023 |
|
RU2808863C1 |
| СПОСОБ СОЗДАНИЯ РЕТРАНСЛИРОВАННЫХ ПОМЕХ | 2012 |
|
RU2523430C2 |
| СПОСОБ ПУТЕВОЙ НАВИГАЦИИ И ОБЗОРА ПЕРЕДНЕЙ ПОЛУСФЕРЫ ЛОКОМОТИВА ПО ГЕОМЕТРИИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2018 |
|
RU2679491C1 |
Изобретение относится к дистанционным способам обнаружения и оценки скорости, высоты, местоположения и типа объектов в выделенной зоне подстилающей поверхности. Производится цикличное поочередное вертикальное радиолокационное зондирование отдельных фрагментов подстилающей поверхности, совокупность которых образует выделенную зону. По окончании каждого цикла зондирования для каждого из сигналов формируется, соответственно, высотно-отражательный рельеф (ВОР) выделенной зоны с разрешением, определяемым выбранными размерами отдельных фрагментов. Высотно-отражательный рельеф содержит информацию не только о высоте, но и об отражательной способности отдельных фрагментов зоны. Путем совместной обработки текущих ВОР электромагнитного и акустического и ВОР не занятой (пустой) зоны формируется информация о сценарии занятости выделенной зоны, включающая габариты объектов (ширину, длину и высоту), расположенных в зоне, их скорости и направление движения, а также относительную плотность объектов. Технический результат направлен на повышение достоверности оценки сценария занятости выделенной зоны подстилающей поверхности. 9 ил. 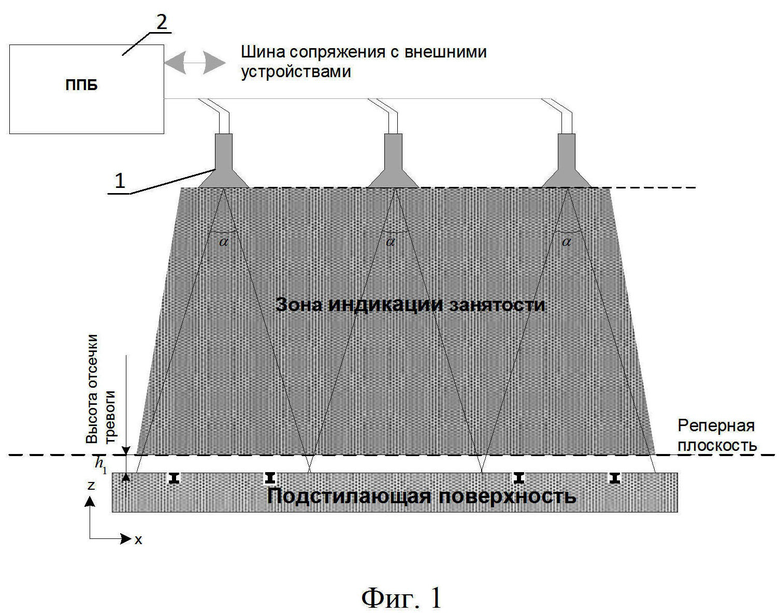
Способ оценки сценария занятости выделенной зоны подстилающей поверхности, включающий радиолокационное обнаружение и оценку дальности объектов в ограниченном телесном угле наблюдения, отличающийся тем, что осуществляют цикличное поочередное вертикальное радиолокационное зондирование N фрагментов подстилающей поверхности, совокупность которых образует выделенную зону, причем оценку высотно-отражательного рельефа (ВОР) выделенной зоны проводят с помощью электромагнитного и акустического сигналов, при этом производится периодическое сравнение текущих ВОР с ВОР пустой выделенной зоны, а также взаимное сравнение текущих ВОР, по результатам сравнения производят пороговое обнаружение и оценку координат объектов, их скорости, ширины, длины, высоты и относительной плотности в выделенной зоне, причем оценку плотности производят по величине разности отражательной способности для электромагнитного и акустического сигналов, оценка скорости объектов производится по результатам изменения ВОР на временном интервале нескольких периодов Т.
| СПОСОБ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ ОСТАНОВИВШИХСЯ ОБЪЕКТОВ АВТОТРАНСПОРТА | 2007 |
|
RU2348055C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1991 |
|
RU2255354C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ, ИЗМЕРЕНИЯ СКОРОСТИ, ДАЛЬНОСТИ И УГЛОВЫХ КООРДИНАТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2521203C1 |
| Устройство для обнаружения объекта в пункте контроля | 1974 |
|
SU510402A1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ НА ПОЛОСЕ ДВИЖЕНИЯ В ЗОНЕ АВТОМАТИЧЕСКИХ ЗАГРАДИТЕЛЬНЫХ УСТРОЙСТВ | 1998 |
|
RU2144876C1 |
| DE 19623524 A1, 02.01.1998. | |||

