ОБЛАСТЬ ПРИМЕНЕНИЯ ИЗОБРЕТЕНИЯ
[0001] Настоящее изобретение относится к устройству, предназначенному для контроля расположения и пространственного положения выдвижного штока гидравлической стойки в комплексно-механизированном очистном забое, механизму выдвижного штока гидравлической стойки в комплексно-механизированном очистном забое, а также способу его осуществления, а именно к автоматическому определению места прохождения и пространственного положения основания гидравлической стойки в комплексно-механизированном очистном забое угольной шахты, которое относится к области автоматического определения места прохождения и пространственного положения основания гидравлической стойки.
ОПИСАНИЕ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
[0002] Основание гидравлической стойки является одним из важнейших электромеханических устройств в комплексно-механизированном забое, а осуществление автоматического последующего контроля основания гидравлической стойки является условием, необходимым для "малочеловечной" и "безлюдной" разработки комплексно-механизированного очистного забоя, улучшения условий труда рабочих и снижения уровня трудоёмкости. В процессе использования основания гидравлической стойки в комплексно-механизированном очистном забое необходимо учитывать различные сложные условия труда, связанные, например, с высоким уровнем давления, напряжением, крушением, трением, а также коррозией. Помимо высокого уровня рабочей нагрузки необходимо также учитывать квалификацию рабочих, которые производят работы на рабочей площадке; все вышеперечисленные факторы оказывают значительное влияние на процесс автоматического последующего контроля основания гидравлической стойки. Автоматический последующий контроль основания гидравлической стойки позволяет значительно повысить уровень производственной эффективности в комплексно-механизированном очистном забое, оптимизировать численность производственного персонала и уменьшить интенсивность труда рабочих. Однако в процессе автоматического контроля основания гидравлической стойки ключевым фактором, влияющим на совместную работу трех машин, является определение расположения и пространственного положения выдвижного штока основания гидравлической стойки.
[0003] Место прохождения и пространственное положение основания гидравлической стойки - это такое место и такое пространственное положение, которые образуется средним рештаком скребкового конвейера в то время, когда основание гидравлической стойки перемещается вперед вместе с очистным забоем, и стойка периодически выдвигается вперед и в глубину. В процессе разработки угольных месторождений необходимо поддерживать определенный уровень прямолинейности между основанием гидравлической стойки, скребковым конвейером и угольным забоем, что позволит обеспечить бесперебойную работу угледобывающего оборудования. Ключевым фактором прямолинейности очистного забоя является место прохождения и пространственное положение основания гидравлической стойки. Прямолинейность очистного забоя может быть обеспечена лучшим образом в том случае, если выдвижной шток расположен в положении посередине.
[0004] Один конец проходного гидроцилиндра основания гидравлической стойки шарнирно соединен с контактным цилиндром, а проходной гидроцилиндр обеспечивает лишь тягу или натяжение и не может использоваться для обеспечения движения по заданному направлению, таким образом, в процессе прохождения основания гидравлической стойки выдвижной шток может быть подвержен действию определенных факторов, таких как рабочее сопротивление среднего рештака скребкового конвейера в рабочей плоскости, и может перемещаться из стороны в сторону и обеспечивать смещение выдвижного штока, находящегося в центральном положении, в результате чего средний рештак скребкового конвейера приобретает наклонное положение, которое приводит к изменению прямолинейности корпуса скребкового конвейера, а также к тому, что корпус скребкового конвейера в комплексно-механизированном очистном забое приобретает неправильную форму. Как следствие, прямолинейность корпуса не может соответствовать эксплуатационным требованиям, предъявляемым для производства, происходит разрыв скребковой цепи, средний рештак скребкового конвейера изнашивается, корпус скребкового конвейера значительно деформируется, что в дальнейшем приводит к возникновению серии отказов, и даже нарушению нормальной работы в рамках всего процесса разработки угольного месторождения. В этой связи имеется большая угроза безопасности.
[0005] В настоящее время, в рамках существующего процесса автоматического контроля основания гидравлической стойки внутри угольной шахты расположения и пространственное положение выдвижного штока не контролируется с помощью датчиков, а влияние места расположения и пространственного положения выдвижного штока на средний рештак скребкового конвейера не придается какого-либо значения. Таким образом, хорошая прямолинейность забоя не может быть достигнута.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Техническая задача
[0006] Для решения проблемы, существующей в предшествующем уровне технике, настоящим изобретением предлагается устройство для контроля расположения и пространственного положения выдвижного штока гидравлической стойки в комплексно-механизированном очистном забое, а также способ его осуществления, чтобы обеспечить нахождение выдвижного штока в центральном положении за счёт контроля и регулировки в режиме реального времени датчиками контроля места расположения и пространственного положения такого штока, за счёт чего будут обеспечены простота механизма управления, быстрое реагирование, высокая точность работ, а также высокий коэффициент экономической эффективности.
Техническое решение
[0007] Для достижения вышеуказанной цели настоящее изобретение предусматривает использование следующего технического решения:
[0008] Устройство для контроля расположения и пространственного положения выдвижного штока гидравлической стойки в комплексно-механизированном очистном забое, при котором комплексно-механизированный очистной забой предусматривает использование нескольких оснований гидравлических стоек; при этом, выдвижной шток каждого из оснований гидравлической стойки связан со средним рештаком скребкового конвейера, при котором левый и правый датчики контроля расположения и пространственного положения обеспечивают контроль расположения и пространственного положения выдвижного штока и расположены, соответственно, на левой и правой сторонах такого штока;
[0009] центральный блок обработки сигналов предназначен для определения степени смещения выдвижного штока путем последовательного установления размеров смещения SL и смещения SR в соответствии с сигналами о совершении сдвига SL и сдвига SR, подаваемым по каналу обратной связи, соответственно, левым и правым датчиками контроля расположения и пространственного положения; и
[0010] приводной механизм, расположенный между каждым основанием гидравлической стойки и выдвижного штока, предназначен для приёма контрольного сигнала от центрального блока обработки сигналов и регулировки места расположения и пространственного положения выдвижного штока.
[0011] Левый и правый датчики контроля расположения и пространственного положения представляют собой четырехсторонние плоские рычажные механизмы одинаковой конструкции, которые симметрично установлены с двух сторон каждого выдвижного штока, при этом
[0012] данные механизмы состоят из следующих элементов: корпус, первый боковой рычаг, второй боковой рычаг и направляющая каретка; при этом крепление корпуса осуществляется на внутренней боковой стенке основания гидравлической стойки, одна сторона направляющей каретки, расположенной рядом с выдвижным штоком, встроена в стенку данного штока, и может плавно перемещаться назад и вперед в горизонтальном направлении по стенке указанного выше штока;
[0013] первый боковой рычаг и второй боковой рычаг расположены параллельно друг другу, имеют одинаковой конструкцию, а также представляют собой механизм управления скольжением штока; при этом
[0014] конец скользящего штока первого бокового рычага шарнирно соединен с нижней частью корпуса с использованием контактного вала, штоковая камера бокового рычага шарнирно соединена с нижней частью направляющей каретки с использованием контактного вала;
[0015] конец скользящего штока второго бокового рычага шарнирно соединен с верхней частью корпуса с использованием контактного вала, штоковая камера бокового рычага шарнирно соединена с верхней частью направляющей каретки с использованием контактного вала; и
[0016] датчик перемещения установлен в штоковой камере бокового рычага четырехстороннего плоского рычажного механизма и предназначен для определения степени соответствующего смещения SL и смещения SR на двух сторонах выдвижного штока в соответствии с относительным перемещением направляющей кареткой, а также для подачи сигнала об установленном смещении SL и смещении SR по каналу обратной связи в центральный блок обработки сигналов.
[0017] Приводной механизм представляет собой гидравлический цилиндр, закрепленный в основании гидравлической стойки, а конец телескопического вала гидравлического цилиндра шарнирно соединен с наружной стенкой выдвижного штока.
[0018] Датчик перемещения представляет собой датчик перемещения с тяговым штоком, который закреплен в нижней части скользящего штока бокового рычага.
[0019] Кулиса расположена в горизонтальном направлении на наружной стенке выдвижного штока, направляющая каретка на четырехстороннем плоском рычажном механизме соединена с возможностью скольжения с внутренней частью кулисы.
[0020] Механизмом выдвижного штока гидравлической стойки в комплексно-механизированном очистном забое применяется устройство для контроля расположения и пространственного положения выдвижного штока гидравлической стойки в комплексно-механизированном очистном забое.
[0021] Настоящим изобретением дополнительно раскрывается способ применения устройства для контроля расположения и пространственного положения гидравлической стойки в комплексно-механизированном очистном забое, где
[0022] Левый датчик контроля расположения и пространственного положения, расположенный на левой стороне выдвижного штока, преобразовывает смещение SL в электрическое напряжение UL, а левый датчик контроля расположения и пространственного положения, расположенный на правой стороне выдвижного штока, преобразовывает смещение SR в электрическое напряжение UR, где, в случае если UR>UL, будет установлено, что нахождение и пространственное положение выдвижного штока смещается в левую сторону, и в этом случае, угол между средним рештаком скребкового конвейера и выпрямленной осью такого рештака будет положительным; при этом выпрямленная ось среднего рештака скребкового конвейера используется в качестве стандартной величины и начинается с выпрямленной оси среднего рештака скребкового конвейера, угол против часовой стрелки, образованный выпрямленной осью и средним рештаком скребкового конвейера, будет положительным, угол по часовой стрелке, образованный выпрямленной осью и средним рештаком скребкового конвейера, будет отрицательным, средний рештак скребкового конвейера смещается вниз в правую сторону и увеличивается по мере того, как увеличивается значение (UR-UL), значения UL и UR корректируются с помощью приводного механизма для натяжения выдвижного штока с целью перемещения в правую сторону, и равны друг другу, то есть UR-UL=0, и в этом случае, нахождение и пространственное положение выдвижного штока будет посредине, то есть в положении середины основания гидравлической стойки, а средний рештак скребкового конвейера будет расположен параллельно средней выпрямленной оси для обеспечения требования прямолинейности; и
[0023] Если UR<UL, будет установлено, что нахождение и пространственное положение выдвижного штока смещается в правую сторону, и в этом случае, угол между средним рештаком скребкового конвейера и выпрямленной осью такого рештака будет отрицательным; при этом выпрямленная ось среднего рештака скребкового конвейера используется в качестве стандартной величины и начинается с выпрямленной оси среднего рештака скребкового конвейера, угол против часовой стрелки, образованный выпрямленной осью и средним рештаком скребкового конвейера, будет положительным, угол по часовой стрелке, образованный выпрямленной осью и средним рештаком скребкового конвейера, будет отрицательным, средний рештак скребкового конвейера смещается вниз в левую сторону и увеличивается по мере того, как увеличивается значение (UL-UR), значения UL и UR корректируются с помощью приводного механизма для натяжения выдвижного штока с целью перемещения в левую сторону, и равны друг другу, то есть UL-UR=0, и в этом случае, нахождение и пространственное положение выдвижного штока будет посредине, то есть в положении середины основания гидравлической стойки, а средний рештак скребкового конвейера будет расположен параллельно средней выпрямленной оси для обеспечения требования прямолинейности.
Полезный эффект изобретения
[0024] Согласно вышеизложенному техническому решению, по сравнению с предшествующим уровнем техники, настоящее изобретение имеет следующие преимущества:
[0025] Датчиком контроля расположения и пространственного положения применяется параллелограммный механизм, противоположные стороны которого всегда параллельны друг другу, то есть направляющий ползунок расположен всегда параллельно внутренней стенке основания гидравлической стойки, в результате чего повышается надежность работы четырехстороннего плоского рычажного механизма и, тем самым, повышается точность измерения датчика смещения и постоянство числового изменения. Кроме того, силовая нагрузка параллелограммного механизма является равномерной, что позволяет увеличить длительность его эксплуатации и косвенным образом повысить эффективность добычи угля.
[0026] Датчик смещения расположен в параллелограммном механизме, а сдвиг, определенный датчиком смещения, преобразуется в сигнал напряжения, который передается в центральный блок обработки сигналов для выполнения подгонки данных. Степень смещения выдвижного штока основания гидравлической стойки точно определяется в соответствии с результатом обработки сигнала. Значения датчиков перемещения, расположенных на двух сторонах выдвижного штока равны, между собой за счёт проведенной корректировки, для дальнейшего полного контроля и регулировки места расположения и пространственного положения выдвижного штока основания гидравлической стойки. Данное устройство обладает высокой точностью и высоким коэффициентом экономической эффективности, а также может выдерживать преодолевать жёсткие условия окружающей среды, которые имеются в шахте, и, следовательно, может использоваться на протяжении длительного периода времени.
КРАТКОЕ ОПИСАНИЕ СХЕМ
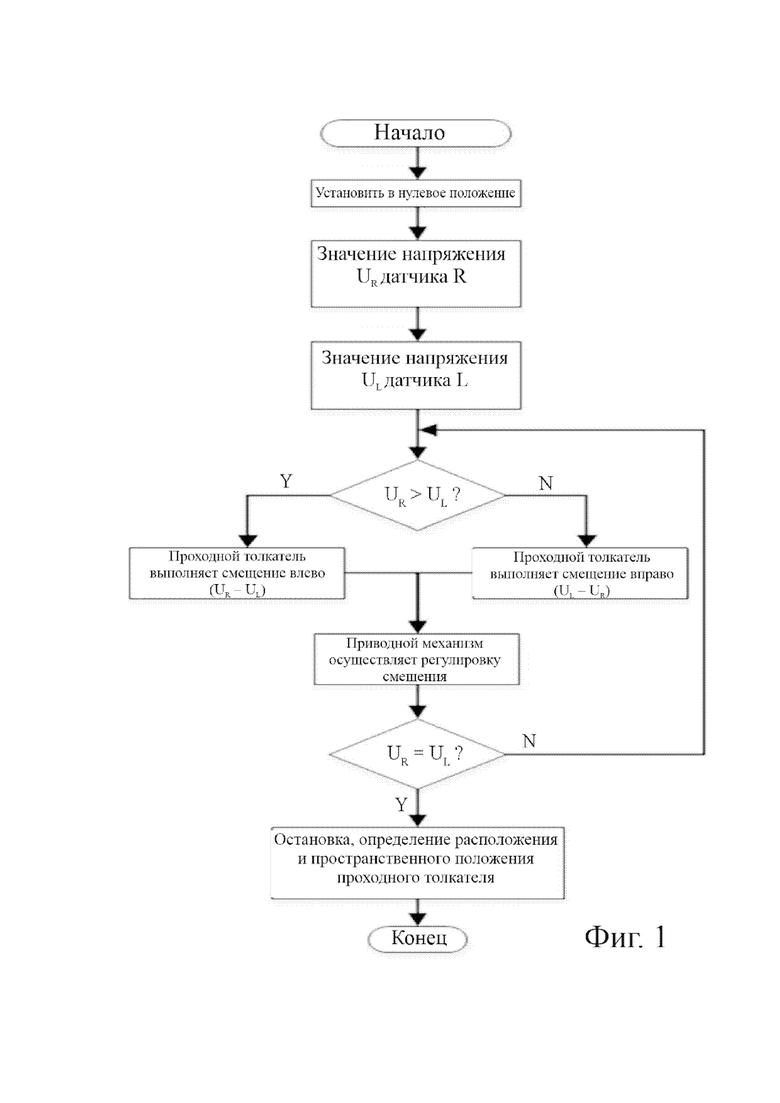
[0027] ФИГ. 1 представляет собой блок-схему способа определения расположения и пространственного положения выдвижного штока согласно настоящему изобретению;
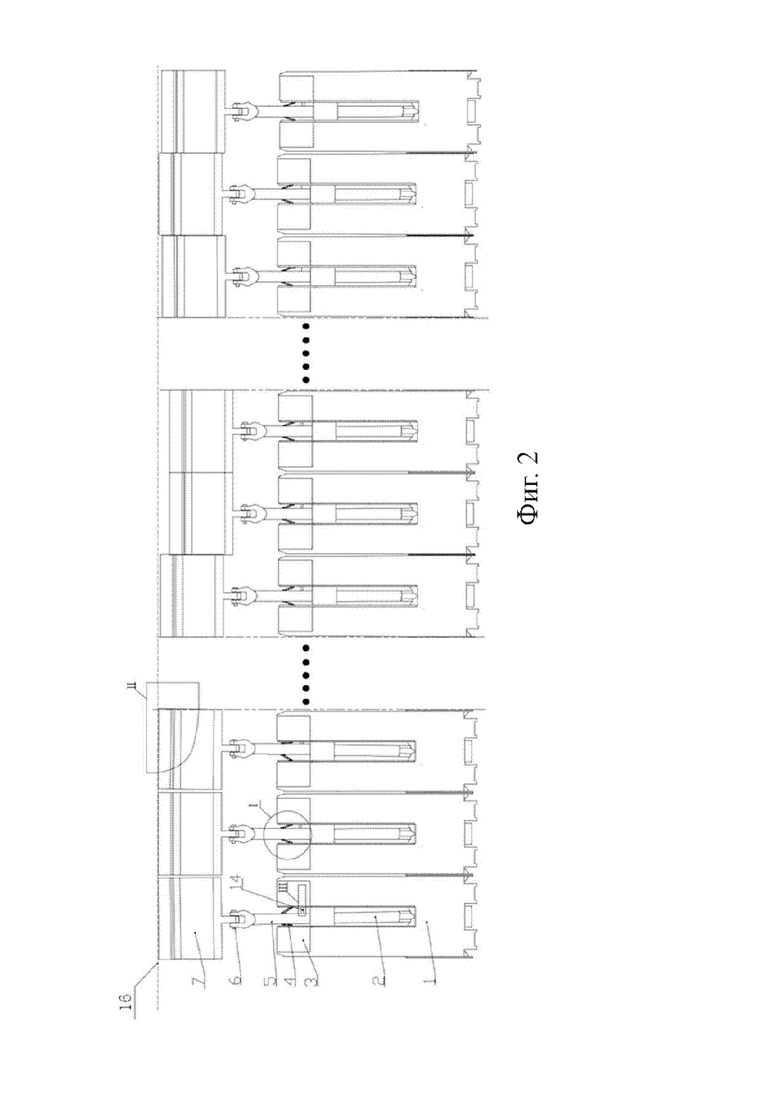
[0028] ФИГ. 2 представляет собой схему расположения и пространственного положения выдвижного штока в рамках процесса определения расположения и пространственного положения выдвижного штока согласно настоящему изобретению;
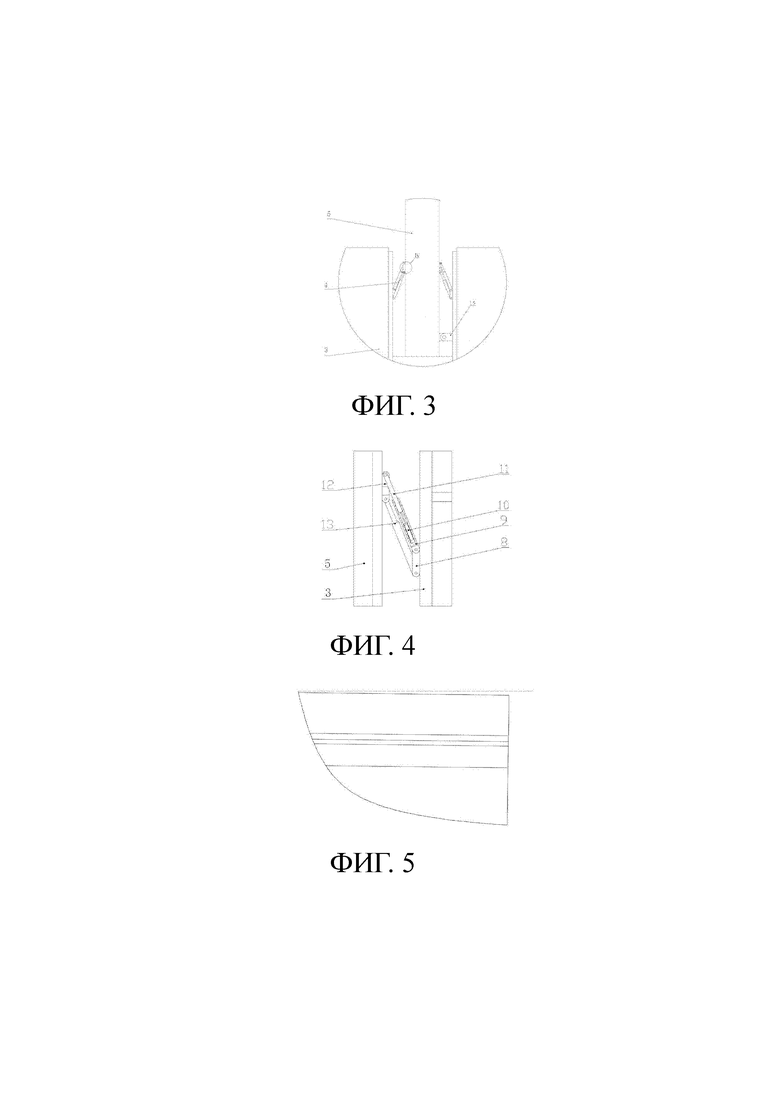
[0029] ФИГ. 3 представляет собой схему установки устройство для контроля расположения и пространственного положения выдвижного штока и параллелограммного механизма при I на ФИГ. 2 согласно настоящему изобретению.
[0030] ФИГ. 4 представляет собой структурную схему установки датчика линейного смещения согласно настоящему изобретению;
[0031] ФИГ. 5 представляет собой схему расположения среднего рештака в неправильном положении скребкового конвейера при II на ФИГ. 2 согласно настоящему изобретению;
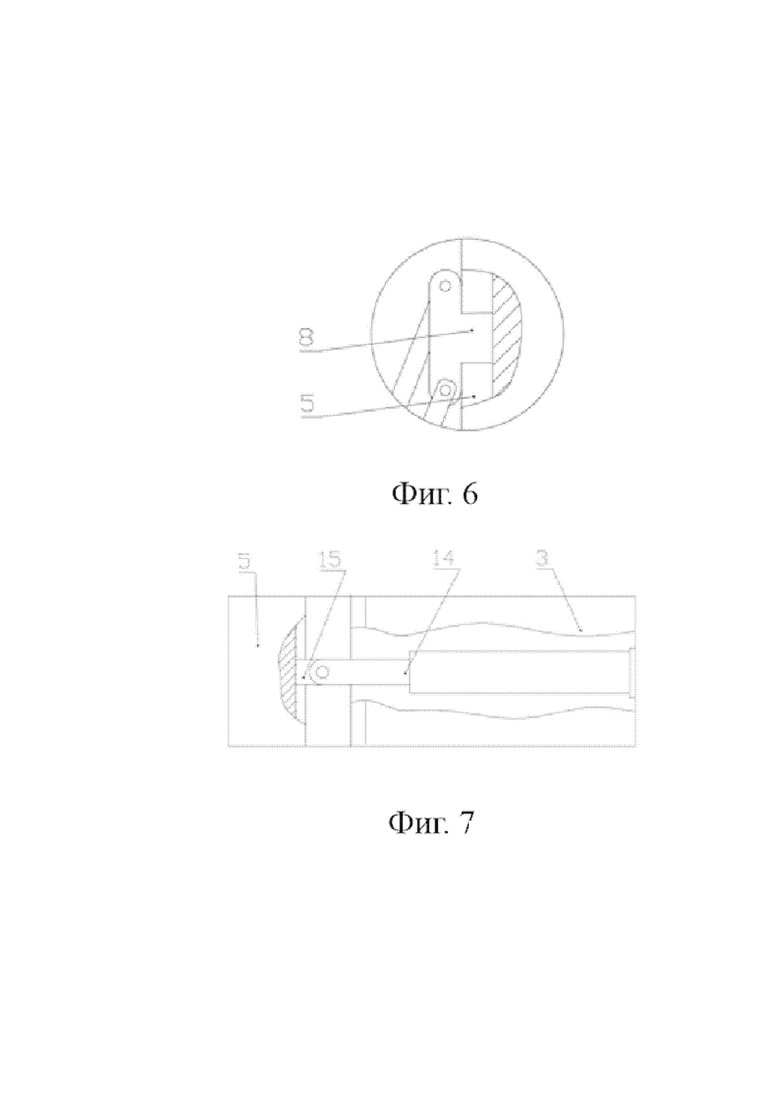
[0032] ФИГ. 6 представляет собой схематическое изображение скольжения для направления параллелограммного механизма при IV на ФИГ. 4 согласно настоящему изобретению; и
[0033] ФИГ. 7 представляет собой частичный вид в разрезе механизма коррекции расположения и пространственного положения согласно настоящему изображению.
[0034] На фигурах: 1. Основание гидравлической стойки, 2. Проходной гидравлический цилиндр, 3. Основание гидравлической стойки, 4. Четырехсторонний плоский рычажный механизм, 5. Выдвижной шток, 6. Контактный Вал, 7. Средний рештак скребкового конвейера, 8. Направляющая каретка, 9. Штоковая камера бокового рычага, 10. Датчик перемещения, 11. Скользящий шток бокового рычага, 12. Корпус, 13. Боковой рычаг, 14. Приводной механизм, 15. Направляющий ползунок, 16. Угольный забой.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0035] Техническое решение настоящего изобретения четко и полностью описано ниже со ссылкой на конкретные варианты осуществления настоящего изобретения и прилагаемые чертежи к его описанию. Несомненно, описанные варианты осуществления изобретения не являются исчерпывающими, здесь представлены не все варианты осуществления настоящего изобретения. Все другие варианты осуществления, полученные специалистом обычной квалификации в данной области техники на основе вариантов осуществления настоящего изобретения без применения творческих усилий, должны подпадать под объем правовой охраны настоящего изобретения.
[0036] Как показано на ФИГ. 1-5, устройство для контроля положения и пространственного положения гидравлической стойки в комплексно-механизированном забое согласно настоящему изобретению включает в себя систему сбора данных о сигналах, систему обработки и обнаружения сигналов, приводной механизм; при этом система сбора данных о сигналах включает в себя следующее:
[0037] два четырехсторонних плоских рычажных механизма, которые симметрично установлены между выдвижным штоком и основанием гидравлической стойки.
[0038] Система обработки и определения сигналов главным образом состоит из модуля обнаружения сигналов и модуля обработки данных, два конца соответственно соединены с выводом, собирающим данные о сигналах, и основанием гидравлической стойки 1 системы исполнения.
[0039] Приводной механизм представляет собой гидравлический толкатель, который принимает сигнал от системы обработки и обнаружения сигналов, предназначенный для перемещения выдвижного штока за счёт толкания или тяги с целью управления положением среднего рештака 7 скребкового конвейера.
[0040] Как показано на ФИГ. 2 и ФИГ. 3 пунктирная линия представляет собой прямую исходную линию среднего рештака скребкового конвейера, который соответствует требованиям прямолинейности комплексно-механизированного очистного забоя; а четырехсторонние плоские рычажные механизмы симметрично установлены на двух сторонах выдвижного штока, а каждый четырехсторонний плоский рычажной механизм включает в себя корпус, первый боковой рычаг, второй боковой рычаг и направляющая каретка, где боковой рычаг представляет собой механизм управления скольжением штока, состоящий из скользящего штока и штоковой камеры бокового рычага.
[0041] Для сбора данных о сигналах датчиком перемещения крепление корпуса осуществляется на внутренней боковой стенке основания гидравлической стойки, одна сторона направляющей каретки, расположенной рядом с выдвижным штоком, встроена в стенку данного штока, и может плавно перемещаться назад и вперед в горизонтальном направлении по стенке указанного выше штока, чтобы обеспечить возможность перемещения четырехстороннего плоского рычажного механизма в прямом или обратном направлении относительно выдвижного штока.
[0042] Согласно данному варианту осуществления изобретения параллелограммный механизм, установленный на левой стороне выдвижного штока, является параллелограммным механизмом L, а параллелограммный механизм, установленный на правой стороне выдвижного штока, является параллелограммным механизмом R.
[0043] Как показано на ФИГ. 4, датчик перемещения представляет собой датчик перемещения с тяговым штоком, который закреплен в четырехстороннем плоском рычажном механизме. Для каждого основания гидравлической стойки 1 установлены два узла в параллелограммном механизме L и параллелограммном механизме R. Узел, установленный в параллелограммном механизме L, представляет собой датчик перемещения с тяговым штоком L, а узел, установленный в параллелограммном механизме R, представляет собой датчик перемещения с тяговым штоком R. Оба эти датчика крепятся в штоковой камере бокового рычага параллелограммного механизма, а тяговый шток датчика перемещения крепится в нижней части скользящего штока бокового рычага параллелограммного механизма.
[0044] Как показано на ФИГ. 5, когда выдвижной шток 5 основания гидравлической стойки 1 смещается в предельное положение, средний рештак 7 скребкового конвейера находится в неправильном положении и смещает угол к идеальной прямой линии скребкового конвейера в комплексно-механизированном очистном забое, что влечет за собой изменение прямолинейности комплексно-механизированного очистного забоя.
[0045] Способ обнаружения выдвижного штока согласно настоящему изобретению подробно описывается ниже:
[0046] Датчик перемещения L, расположенный на левой стороне выдвижного штока, является исходным значением UL, и, в случае если значение напряжения UR датчика перемещения с тяговым штоком R, расположенного на правой стороне основания гидравлической стойки, окажется выше UL, будет установлено, что нахождение и пространственное положение выдвижного штока смещается в левую сторону. И в этом случае, угол между средним рештаком скребкового конвейера и выпрямленной осью такого рештака будет положительным (выпрямленная ось среднего рештака скребкового конвейера используется в качестве стандартной величины и начинается с выпрямленной оси среднего рештака скребкового конвейера, угол против часовой стрелки, образованный выпрямленной осью и средним рештаком скребкового конвейера, будет положительным, угол по часовой стрелке, образованный выпрямленной осью и средним рештаком скребкового конвейера, будет отрицательным), средний рештак скребкового конвейера смещается вниз в правую сторону и увеличивается по мере того, как увеличивается значение (UR-UL). Значения UL и UR корректируются с помощью приводного механизма, и равны друг другу, то есть UR-UL=0. И в этом случае, нахождение и пространственное положение выдвижного штока будет посредине (в положении середины основания гидравлической стойки), а средний рештак скребкового конвейера будет расположен параллельно средней выпрямленной оси для обеспечения требования прямолинейности.
[0047] Если значение напряжения UR датчика перемещения с тяговым штоком R на правой стороне основания гидравлической стойки меньше UL, будет установлено, что расположение и пространственное положение выдвижного штока смещается в правую сторону. И в этом случае, угол между средним рештаком скребкового конвейера и выпрямленной осью такого рештака будет отрицательным (выпрямленная ось среднего рештака скребкового конвейера используется в качестве стандартной величины и начинается с выпрямленной оси среднего рештака скребкового конвейера, угол против часовой стрелки, образованный выпрямленной осью и средним рештаком скребкового конвейера, будет положительным, угол по часовой стрелке, образованный выпрямленной осью и средним рештаком скребкового конвейера, будет отрицательным), средний рештак скребкового конвейера смещается вниз в левую сторону и увеличивается по мере того, как увеличивается значение (UL-UR). Значения UL и UR корректируются с помощью приводного механизма, и равны друг другу, то есть UL-UR=0. И в этом случае, нахождение и пространственное положение выдвижного штока будет посредине (в положении середины основания гидравлической стойки), а средний рештак скребкового конвейера будет расположен параллельно средней выпрямленной оси для обеспечения требования прямолинейности.
[0048] В качестве предпочтительного варианта технического решения в рамках настоящего изобретения приводной механизм представлен в виде гидравлического цилиндра, расположенного между каждым основанием гидравлической стойки и выдвижным штоком.
Изобретение относится к области горного дела, в частности к оборудованию в очистном забое. Техническим результатом является повышение уровня производственной эффективности в комплексно-механизированном очистном забое, оптимизация численности производственного персонала и уменьшение интенсивности труда рабочих. Предложено устройство для контроля расположения и пространственного положения выдвижного штока гидравлической стойки в комплексно-механизированном забое. При этом выдвижной шток каждого из оснований гидравлической стойки связан со средним рештаком скребкового конвейера и содержит левый и правый датчики контроля расположения и пространственного положения, обеспечивающие контроль расположения и пространственного положения выдвижного штока и расположенные соответственно на левой и правой сторонах такого штока. Кроме того, устройство содержит центральный блок обработки сигналов, предназначенный для определения степени смещения выдвижного штока путем последовательного установления размеров смещения SL и смещения SR в соответствии с сигналами о совершении сдвига SL и сдвига SR, подаваемыми по каналу обратной связи соответственно левым и правым датчиками контроля расположения и пространственного положения. Также устройство содержит приводной механизм, расположенный между каждым основанием гидравлической стойки и выдвижного штока, предназначенный для приёма контрольного сигнала от центрального блока обработки сигналов и регулировки места расположения и пространственного положения выдвижного штока. 2 н. и 4 з.п. ф-лы, 7 ил.
1. Устройство для контроля расположения и пространственного положения выдвижного штока гидравлической стойки в комплексно-механизированном забое, в частности в комплексно-механизированном очистном забое, отличающееся тем, что комплексно-механизированный очистной забой предусматривает использование нескольких оснований гидравлических стоек; при этом выдвижной шток каждого из оснований гидравлической стойки связан со средним рештаком скребкового конвейера, содержит левый и правый датчики контроля расположения и пространственного положения, обеспечивающие контроль расположения и пространственного положения выдвижного штока и расположенные соответственно на левой и правой сторонах такого штока;
центральный блок обработки сигналов предназначен для определения степени смещения выдвижного штока путем последовательного установления размеров смещения SL и смещения SR в соответствии с сигналами о совершении сдвига SL и сдвига SR, подаваемыми по каналу обратной связи соответственно левым и правым датчиками контроля расположения и пространственного положения; и
приводной механизм, расположенный между каждым основанием гидравлической стойки и выдвижного штока, предназначен для приёма контрольного сигнала от центрального блока обработки сигналов и регулировки места расположения и пространственного положения выдвижного штока.
2. Устройство по п. 1, отличающееся тем, что левый и правый датчики контроля расположения и пространственного положения представляют собой четырехсторонние плоские рычажные механизмы одинаковой конструкции, которые симметрично установлены с двух сторон каждого выдвижного штока, где
данные механизмы состоят из следующих элементов: корпус, первый боковой рычаг, второй боковой рычаг и направляющая каретка; при этом крепление корпуса осуществляется на внутренней боковой стенке основания гидравлической стойки, одна сторона направляющей каретки, расположенной рядом с выдвижным штоком, встроена в стенку данного штока и может плавно перемещаться назад и вперед в горизонтальном направлении по стенке указанного выше штока;
первый боковой рычаг и второй боковой рычаг расположены параллельно друг другу, имеют одинаковой конструкцию, а также представляют собой механизм управления скольжением штока, отличающийся тем, что
конец скользящего штока первого бокового рычага шарнирно соединен с нижней частью корпуса с использованием контактного вала, штоковая камера бокового рычага шарнирно соединена с нижней частью направляющей каретки с использованием контактного вала;
конец скользящего штока второго бокового рычага шарнирно соединен с верхней частью корпуса с использованием контактного вала, штоковая камера бокового рычага шарнирно соединена с верхней частью направляющей каретки с использованием контактного вала; и
датчик перемещения установлен в штоковой камере бокового рычага четырехстороннего плоского рычажного механизма и предназначен для регистрации степени соответствующего смещения SL и смещения SR на двух сторонах выдвижного штока в соответствии с относительным перемещением направляющей кареткой, а также для подачи сигнала об установленном смещении SL и смещении SR по каналу обратной связи в центральный блок обработки сигналов.
3. Устройство по п. 1, отличающееся тем, что приводной механизм представляет собой гидравлический цилиндр, закрепленный в основании гидравлической стойки, а конец телескопического вала гидравлического цилиндра шарнирно соединен с наружной стенкой выдвижного штока.
4. Устройство по п. 2, отличающееся тем, что датчик перемещения представляет собой датчик перемещения с тяговым штоком, который закреплен в нижней части скользящего штока бокового рычага.
5. Устройство по п. 2, отличающееся тем, что кулиса расположена в горизонтальном направлении на наружной стенке выдвижного штока, направляющая каретка на четырехстороннем плоском рычажном механизме соединена с возможностью скольжения с внутренней частью кулисы.
6. Способ применения устройства для контроля расположения и пространственного положения выдвижного штока гидравлической стойки в комплексно-механизированном забое по любому из пп. 1-5, отличающийся тем, что левый датчик контроля расположения и пространственного положения, расположенный на левой стороне выдвижного штока, преобразовывает смещение SL в электрическое напряжение UL, а правый датчик контроля расположения и пространственного положения, расположенный на правой стороне основания гидравлической стойки, преобразовывает смещение SR в электрическое напряжение UR, при котором, в случае если UR>UL, будет установлено, что нахождение и пространственное положение выдвижного штока смещается в левую сторону, и в этом случае угол между средним рештаком скребкового конвейера и выпрямленной осью такого рештака будет положительным, при котором выпрямленная ось среднего рештака скребкового конвейера используется в качестве стандартной величины и начинается с выпрямленной оси среднего рештака скребкового конвейера, угол против часовой стрелки, образованный выпрямленной осью и средним рештаком скребкового конвейера, будет положительным, угол по часовой стрелке, образованный выпрямленной осью и средним рештаком скребкового конвейера, будет отрицательным, средний рештак скребкового конвейера смещается вниз в правую сторону и увеличивается по мере того, как увеличивается значение (UR-UL), значения UL и UR корректируются с помощью приводного механизма для натяжения выдвижного штока с целью перемещения в правую сторону, и равны друг другу, то есть UR-UL=0, и в этом случае нахождение и пространственное положение выдвижного штока будет посредине, то есть в положении середины основания гидравлической стойки, а средний рештак скребкового конвейера будет расположен параллельно средней выпрямленной оси для обеспечения требования прямолинейности; и, если UR<UL, будет установлено, что нахождение и пространственное положение выдвижного штока смещается в правую сторону, и в этом случае угол между средним рештаком скребкового конвейера и выпрямленной осью такого рештака будет отрицательным, при котором выпрямленная ось среднего рештака скребкового конвейера используется в качестве стандартной величины и начинается с выпрямленной оси среднего рештака скребкового конвейера, угол против часовой стрелки, образованный выпрямленной осью и средним рештаком скребкового конвейера, будет положительным, угол по часовой стрелке, образованный выпрямленной осью и средним рештаком скребкового конвейера, будет отрицательным, средний рештак скребкового конвейера смещается вниз в левую сторону и увеличивается по мере того, как увеличивается значение (UL-UR), значения UL и UR корректируются с помощью приводного механизма для натяжения выдвижного штока с целью перемещения в левую сторону, и равны друг другу, то есть UL-UR=0, и в этом случае нахождение и пространственное положение выдвижного штока будет посредине, то есть в положении середины основания гидравлической стойки, а средний рештак скребкового конвейера будет расположен параллельно средней выпрямленной оси для обеспечения требования прямолинейности.
| АППАРАТ И МЕТОД ДЛЯ АВТОМАТИЧЕСКОГО ВЫРАВНИВАНИЯ КОРПУСА КОНВЕЙЕРА НА СКРЕПЕРНОМ КОНВЕЙЕРЕ ПОЛНОСТЬЮ МЕХАНИЗИРОВАННОГО УГЛЕДОБЫВАЮЩЕГО ЗАБОЯ | 2015 |
|
RU2657889C1 |
| Устройство управления передвижной базы агрегата | 1991 |
|
SU1809100A1 |
| Способ управления перемещением очистного комплекса | 1987 |
|
SU1456560A1 |
| US 3478522 A, 18.11.1969 | |||
| CN 106523012 A, 22.03.2017 | |||
| CN 202117698 U, 18.01.2012. | |||

