[Область техники]
[0001]
Настоящее изобретение относится к способу коррекции траектории движения для коррекции траектории движения транспортного средства, способу управления движением для управления движением транспортного средства и устройству для коррекции траектории движения.
[Уровень техники]
[0002]
Известно устройство для управления движением транспортного средства, в котором получается информация о форме полосы движения, включенная в информацию карты (картографическую информацию); информация о форме полосы движения около транспортного средства получается на основе информации изображения, полученной камерой; рассчитываются траектории движения транспортных средств вокруг; сравниваются и рассчитываются полученная форма полосы движения и форма траектории движения транспортных средств вокруг; выбирается форма полосы движения со степенью сходства выше предварительно заданного уровня; и путь корректируется, когда выбранная форма полосы движения не соответствует текущему целевому пути (например, Патентный документ 1).
[Документ предшествующего уровня техники]
[Патентный Документ]
[0003]
[Патентный документ 1] WO2017/169021A.
[Сущность изобретения]
[Проблемы, решаемые изобретением]
[0004]
Однако в вышеупомянутом предшествующем уровне техники, когда линия сегмента полос движения не нарисована на дороге, например на перекрестке, поскольку невозможно обнаружить форму полосы движения из захваченного изображения камеры, возникает проблема, заключающаяся в том, что траектория движения не может быть скорректирована.
[0005]
Задача, которая должна быть решена с помощью настоящего изобретения, состоит в том, чтобы предоставить способ коррекции траектории движения, способ управления движением и устройство для коррекции траектории движения в обстоятельствах, когда линия сегмента не предусмотрена на дороге или когда линия сегмента не обнаружена правильно.
[Средство для решения проблем]
[0006]
Настоящее изобретение решает вышеупомянутую проблему путем: формирования маршрута движения рассматриваемого транспортного средства на основе информации карты; вычисления траектории движения рассматриваемого транспортного средства, которая становится целевой траекторией, когда рассматриваемое транспортное средство движется по маршруту движения рассматриваемого транспортного средства; обнаружение положения другого транспортного средства, движущегося по полосе движения, которая расположена в направлении ширины рассматриваемого транспортного средства, с помощью датчика; вычисления смещения положения другого транспортного средства в пределах полосы движения, по которой движется другое транспортное средство, на основе положения другого транспортного средства; и корректировки траектории движения рассматриваемого транспортного средства в соответствии с вычисленным смещением.
[Эффект изобретения]
[0007]
Согласно настоящему изобретению траектория движения рассматриваемого транспортного средства может корректироваться в обстоятельствах, когда линия сегмента не предусмотрена на дороге или когда линия сегмента не может быть должным образом обнаружена.
[Краткое описание чертежей]
[0008]
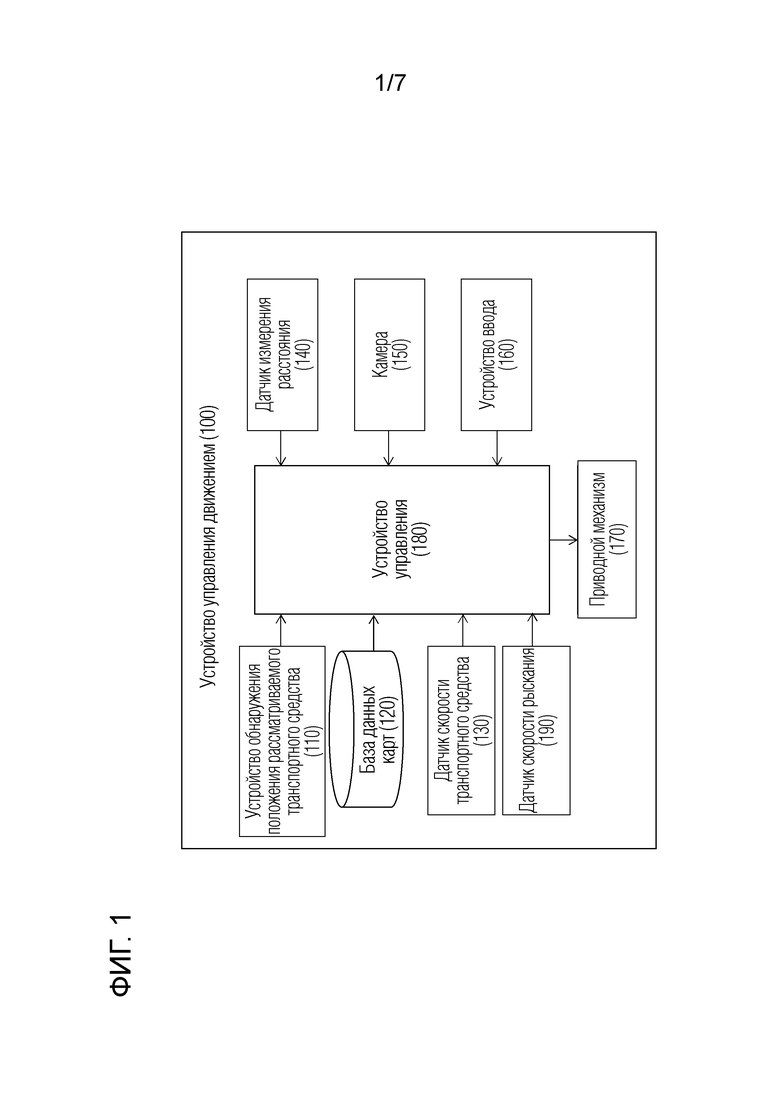
Фиг. 1 - блок-схема, иллюстрирующая устройство управления движением согласно варианту осуществления настоящего изобретения.
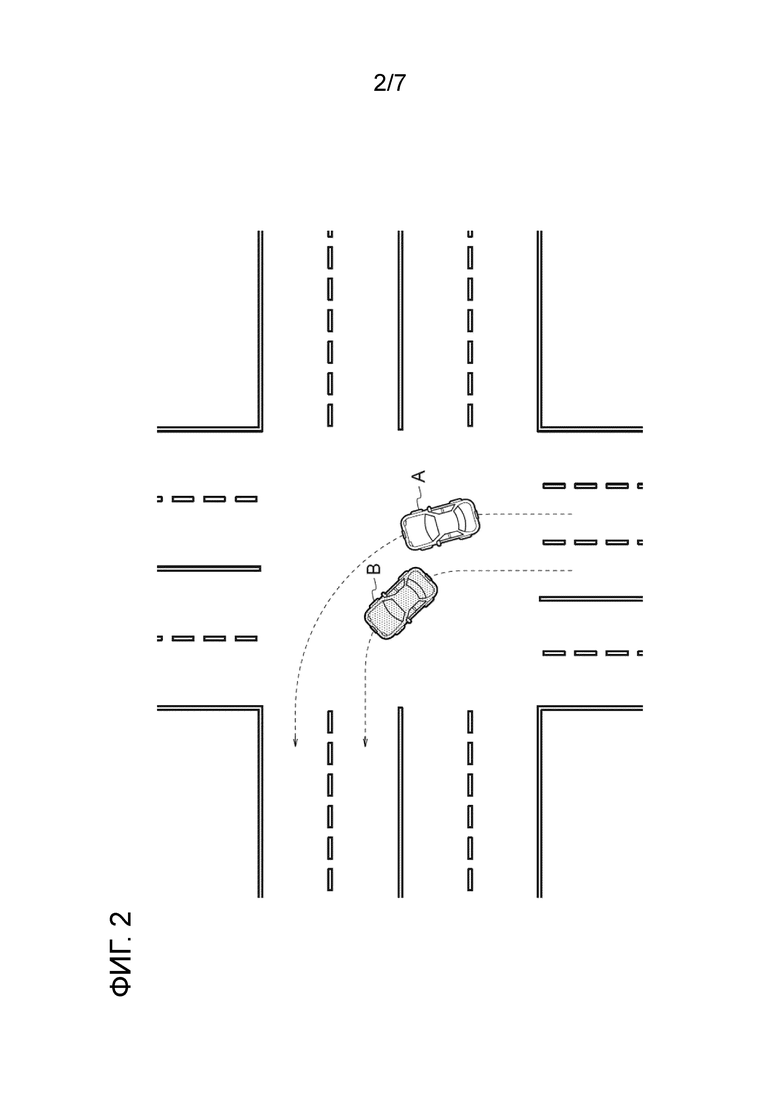
Фиг. 2 - схема, иллюстрирующая пример сцены, в которой выполняется процесс управления согласно настоящему изобретению.
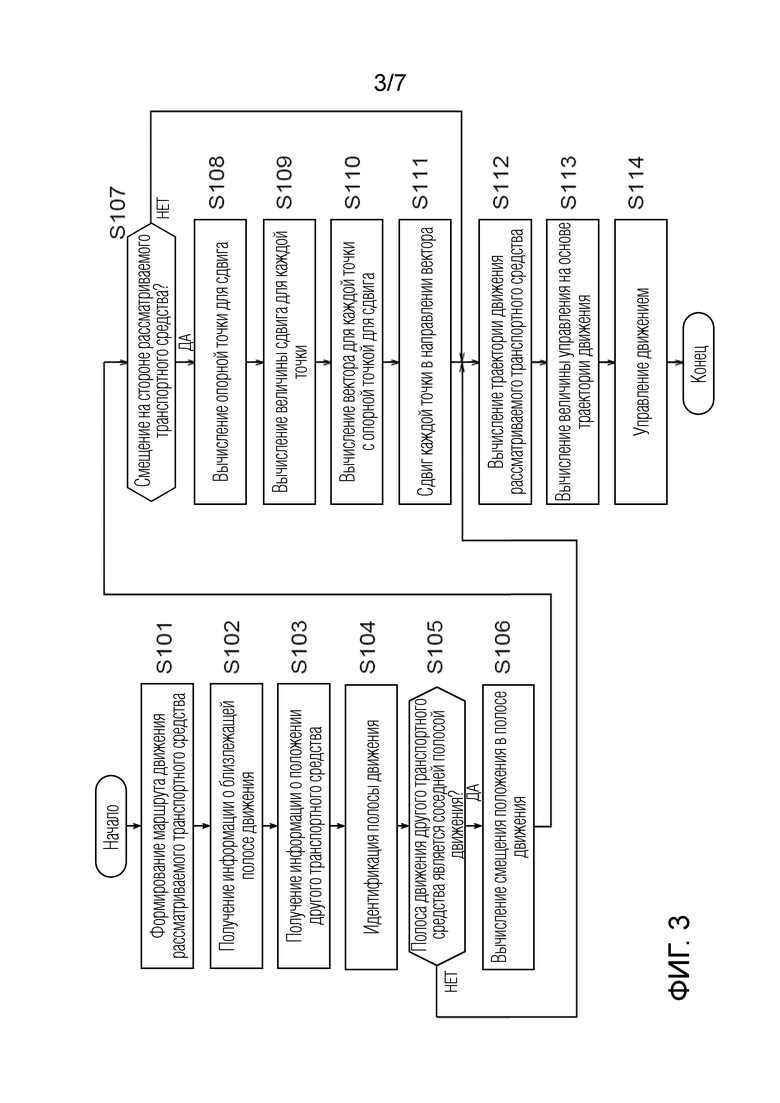
Фиг. 3 - это блок-схема последовательности операций управления, выполняемой в управляющем устройстве по фиг. 1.
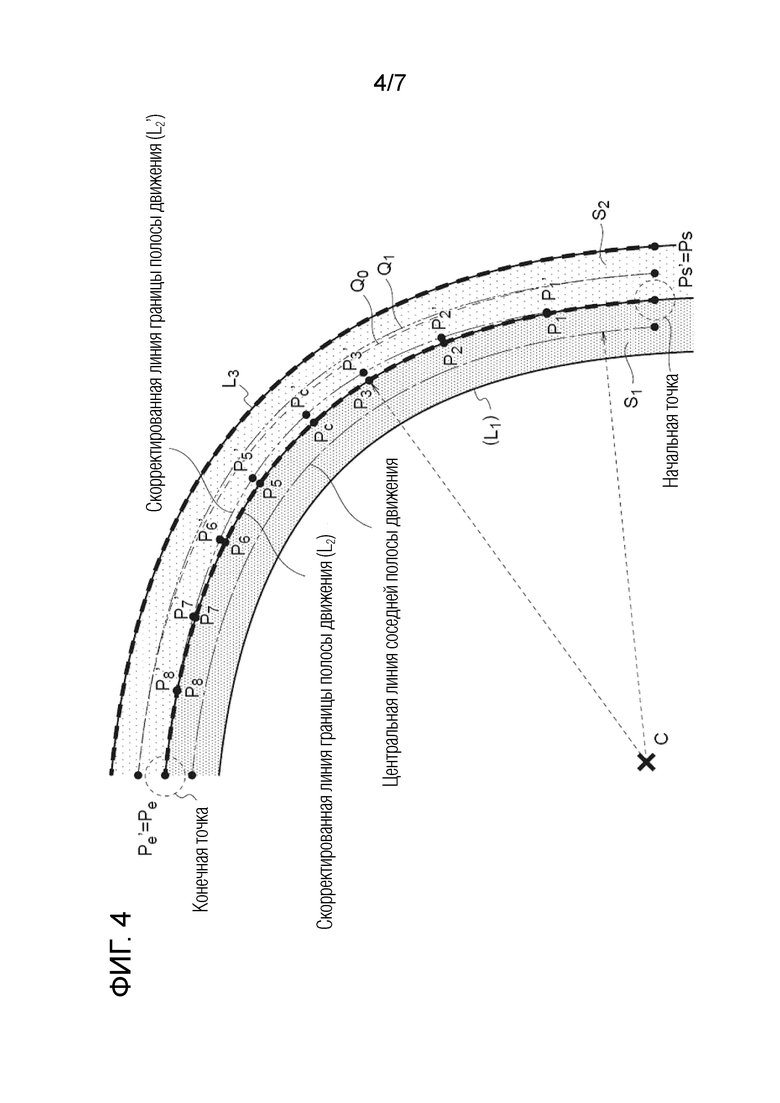
Фиг. 4 - концептуальная схема, поясняющая центральную линию соседней полосы движения и граничную линию полосы движения (линию границы полосы движения), по которой движется рассматриваемое транспортное средство.
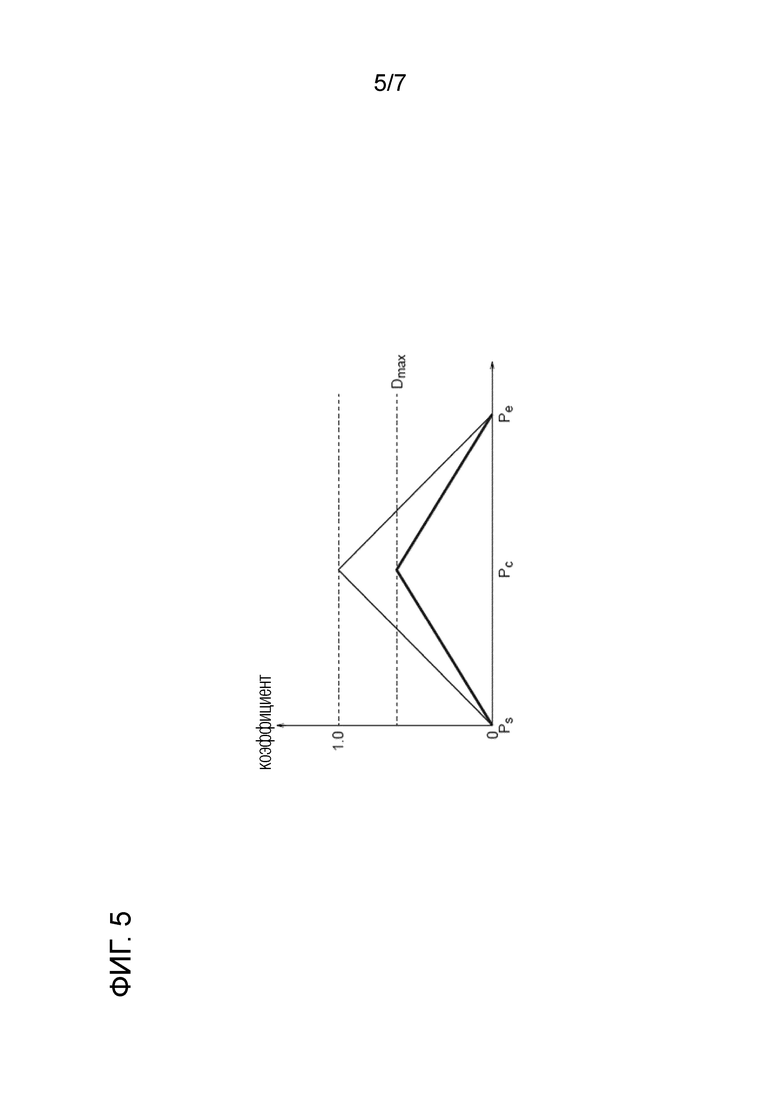
Фиг. 5 - график, показывающий отношения величин смещения относительно точек на линии границы полосы движения.
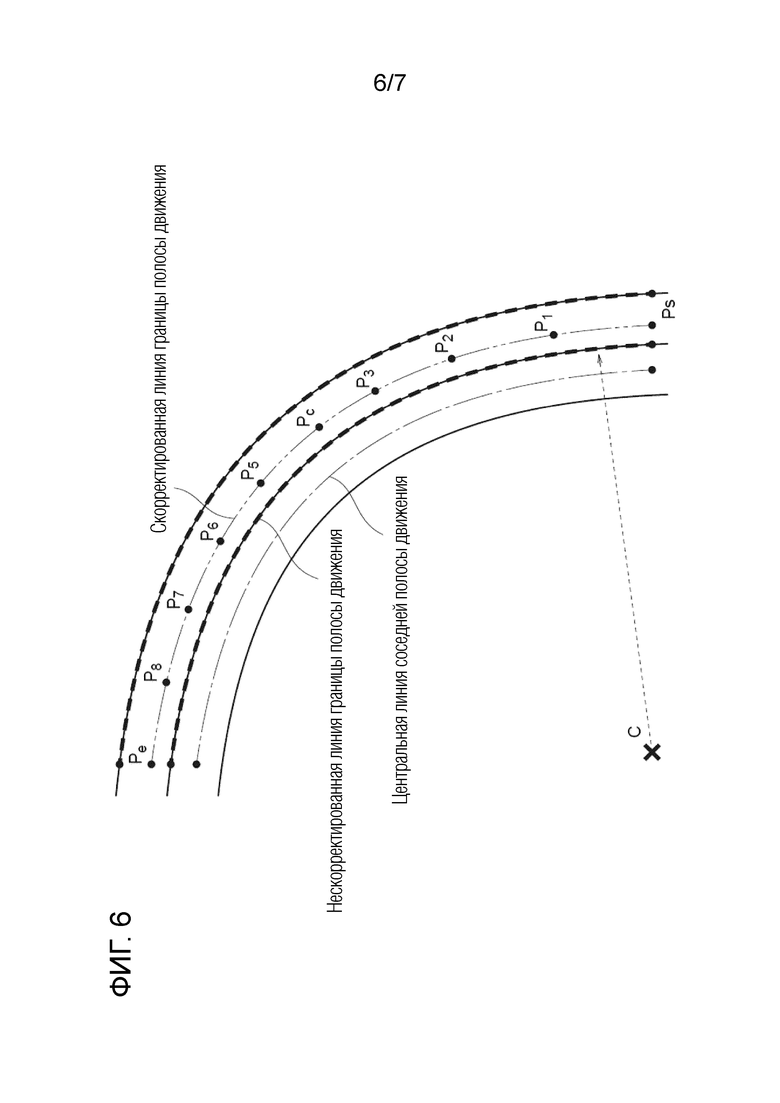
Фиг. 6 - концептуальная схема, поясняющая центральную линию соседней полосы движения и граничную линию полосы движения (линию границы полосы движения), по которой движется рассматриваемое транспортное средство.
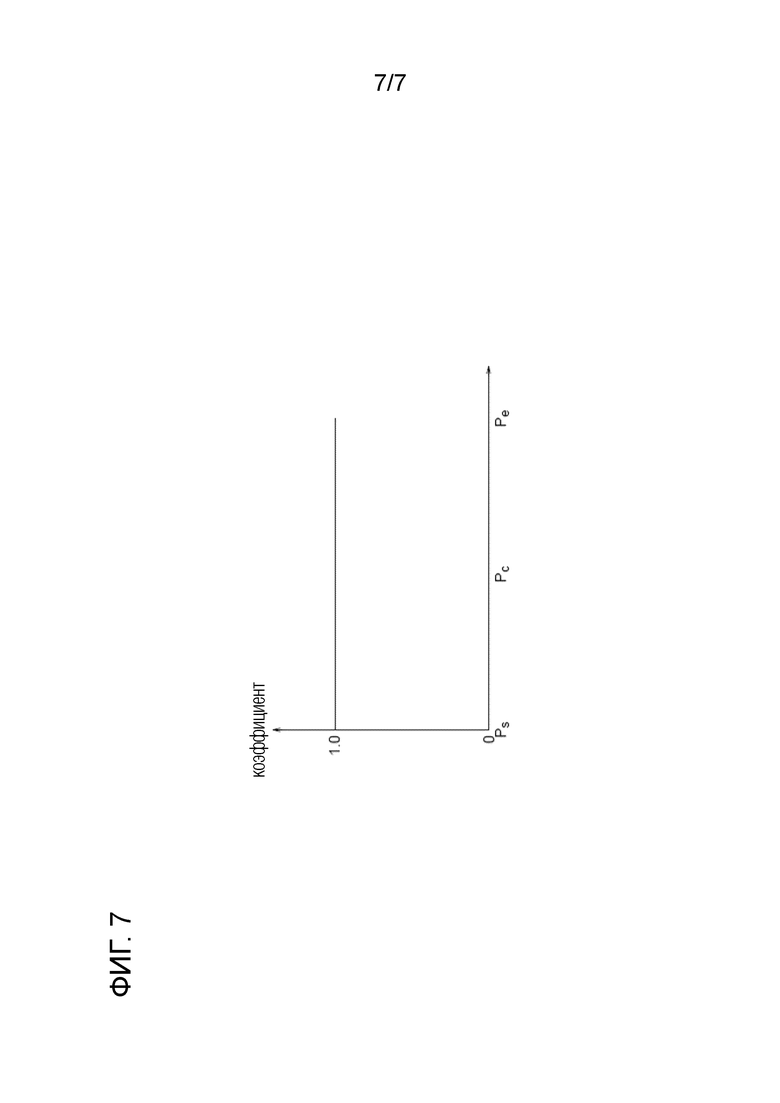
Фиг. 7 - график, показывающий отношения величин смещения относительно точек на линии границы полосы движения.
[Вариант(ы) осуществления настоящего изобретения]
[0009]
В дальнейшем устройство управления движением (устройство коррекции траектории движения) для транспортного средства и его способ согласно варианту осуществления настоящего изобретения будут объяснены со ссылкой на чертежи. Между прочим, в настоящем варианте осуществления настоящее изобретение будет описано на примере устройства управления движением, установленного на транспортном средстве.
<<Первый вариант осуществления>>
[0010]
Фиг.1 - это схема, иллюстрирующая конфигурацию устройства 100 управления движением транспортного средства согласно варианту осуществления настоящего изобретения. Как показано на фиг.1, устройство 100 управления движением согласно настоящему варианту осуществления содержит устройство 110 обнаружения положения рассматриваемого транспортного средства, базу данных 120 карт, датчик 130 скорости транспортного средства, датчик 140 измерения расстояния, камеру 150, приводной механизм 170, устройство 180 управления и датчик 190 скорости рыскания. Эти компоненты подключены друг к другу через сеть контроллеров (CAN) или другую локальную сеть в транспортном средстве для взаимного обмена информацией.
[0011]
Устройство 110 обнаружения положения рассматриваемого транспортного средства содержит блок GPS, который обнаруживает радиоволны, передаваемые от множества спутниковых каналов связи посредством локатора (антенны GPS), для периодического получения информации о положении рассматриваемого транспортного средства, а также обнаруживает текущее положение рассматриваемого транспортного средства на основе полученной информации о положении рассматриваемого транспортного средства, информации об изменении угла, полученной от гироскопического датчика, и скорости транспортного средства, полученной от датчика скорости транспортного средства. Устройство 110 обнаружения положения рассматриваемого транспортного средства может обнаруживать положение рассматриваемого транспортного средства с использованием хорошо известной техники сопоставления карт.
[0012]
База 120 данных карт содержит информацию карты. В информации карты, хранящейся в базе 120 данных карт, информация о формах дорог в соответствующих координатах карты, например, атрибуты, относящиеся к кривым, уклонам, перекресткам, развязкам, узким дорогам, прямым дорогам, структурам обочин и точкам слияния, записываются в ассоциации с координатами карты. Информация карты включает в себя информацию о линии границы полосы движения (границу пути) и информацию о средней линии области движения (центральная линия полосы движения) в качестве информации о маршруте движения. Маршрут движения показывает всю полосу движения, зажатую между линиями границ полосы движения. Если на дороге нарисована полоса движения, информация о линиях границ полосы движения представляет положение полосы движения на дороге. Например, в области, где полоса движения не нарисована на поверхности дороги, например, на перекрестке, данные линии границы полосы движения указывают гипотетическую линию границы полосы движения после идентификации курса движения транспортного средства. Например, на перекрестке, где транспортное средство может повернуть налево, повернуть направо и двигаться прямо, линия границы полосы движения показывает границу пути для поворота налево, границу пути для поворота направо и границу пути для движения прямо, соответственно, чтобы соединить въезд (въезд транспортного средства) и выезд (выезд транспортного средства) перекрестка. Между прочим, линия границы полосы движения не обязательно должна указывать границы путей, соответствующих всем маршрутам движения в пределах перекрестка. Информация о маршруте движения может включать в себя информацию о центральной линии области движения вместо маршрута движения. Центральная линия области движения соответствует центральной линии между линией границы полосы движения с левой стороны и линией границы полосы движения с правой стороны в направлении ширины транспортного средства. Кроме того, маршрут движения может включать в себя как линии границ маршрута движения, так и центральную линию области движения. Информация карты - это высокоточная карта, используемая для управления автономным вождением транспортными средствами.
[0013]
Датчик 130 скорости транспортного средства измеряет скорость вращения системы привода, такой как ведущий вал, и обнаруживает скорость движения рассматриваемого транспортного средства (в дальнейшем также упоминаемую как скорость транспортного средства) на основе измеренной скорости вращения. Скорость транспортного средства рассматриваемого транспортного средства, обнаруженная датчиком 130 скорости транспортного средства, выводится в устройство 180 управления. Датчик 190 скорости рыскания установлен в соответствующем месте в салоне транспортного средства и обнаруживает скорость рыскания рассматриваемого транспортного средства (скорость изменения угла поворота в направлении поворота). Информация об обнаруженной скорости рыскания рассматриваемого транспортного средства выводится в устройство 180 управления.
[0014]
Датчик 140 измерения расстояния обнаруживает объекты, присутствующие вокруг рассматриваемого транспортного средства. Кроме того, датчик 140 измерения расстояния вычисляет относительное расстояние и относительную скорость между рассматриваемым транспортным средством и объектом. Информация об объекте, обнаруженном датчиком 140 измерения расстояния, передается в устройство 180 управления. Датчик 140 измерения расстояния включает в себя LRF, такие как лазерный радар, радар миллиметрового диапазона и т.п.
[0015]
Камера 150 захватывает дороги и объекты вокруг рассматриваемого транспортного средства. В этом варианте осуществления камера 150 создает изображение передней части рассматриваемого транспортного средства. Информация об изображении, захваченная камерой 150, передается на устройство 180 управления. Камера 150 представляет собой камеру для формирования изображения передней части рассматриваемого транспортного средства и/или камеру для формирования изображения боковой стороны рассматриваемого транспортного средства. Между прочим, устройство 100 управления движением может включать в себя радар или лидар в дополнение к датчику 140 измерения расстояния и камере 150 для обнаружения условий вокруг рассматриваемого транспортного средства.
[0016]
Устройство 160 ввода представляет собой рабочий орган, которым может управлять водитель. В настоящем варианте осуществления водитель задает включение/выключение управления автономным вождением, управляя устройством 160 ввода. В управлении автономным вождением транспортных средств согласно настоящему варианту осуществления, когда едущее впереди транспортное средство существует перед рассматриваемым транспортным средством, управление расстоянием от транспортного средства до транспортного средства (управление следованием за едущим впереди транспортным средством) выполняется для рассматриваемого транспортного средства, движущегося таким образом, что расстояние от транспортного средства до транспортного средства между рассматриваемым транспортным средством и едущим впереди транспортным средством поддерживается на расстоянии от транспортного средства до транспортного средства, заданном водителем, и рассматриваемое транспортное средство следует за едущим впереди транспортным средством. Когда едущее впереди транспортное средство не существует перед рассматриваемым транспортным средством, управление скоростью выполняется для рассматриваемого транспортного средства, движущегося со скоростью транспортного средства, заданной водителем. В настоящем варианте осуществления водитель управляет устройством 160 ввода, чтобы тем самым задавать заданную скорость транспортного средства для рассматриваемого транспортного средства (например, конкретное значение скорости) в управлении скоростью и заданное расстояние от транспортного средства до транспортного средства в управлении расстоянием от транспортного средства до транспортного средства (например, любая из трех ступеней из короткого, среднего и большого расстояния).
[0017]
Приводной механизм 170 включает в себя двигатели и/или моторы (силовые системы), тормоза (тормозные системы) и исполнительные механизмы рулевого управления (системы рулевого управления) и т.д. для автономного вождения рассматриваемого транспортного средства. В настоящем варианте осуществления, когда выполняется управление автономным вождением, которое будет описано ниже, работой приводного механизма 170 управляет устройство 180 управления.
[0018]
Устройство 180 управления представляет собой компьютер с процессором и включает ROM (Read Only Memory, постоянное запоминающее устройство), в котором хранится программа для управления движением рассматриваемого транспортного средства, CPU (Central Processing Unit, центральный процессор), который выполняет программу, хранящуюся в ROM, и RAM (Random Access Memory, оперативная память), которая функционирует как доступное запоминающее устройство. Между прочим, в качестве рабочей схемы микропроцессор (MPU), процессор цифровых сигналов (DSP), специализированная интегральная схема (ASIC), программируемая вентильная матрица (FPGA) и т.п. могут использоваться в качестве замены или в дополнение к процессору.
[0019]
Устройство 180 управления выполняет программы, хранящиеся в ROM, тем самым реализуя: функцию формирования маршрута движения рассматриваемого транспортного средства для формирования маршрута движения рассматриваемого транспортного средства; функцию идентификации полосы движения другого транспортного средства для идентификации полосы движения другого транспортного средства; функция вычисления смещения; функцию формирования (вычисления) и корректировки траектории движения; и функцию управления движением (включая функцию автономного следования) для управления движением рассматриваемого транспортного средства. Далее объясняется каждая из функций, обеспечиваемых устройством 180 управления. Между прочим, помимо функций, описанных ниже, устройство 180 управления имеет другие функции, такие как функция обнаружения для обнаружения положения рассматриваемого транспортного средства.
[0020]
Устройство 180 управления вычисляет маршрут движения рассматриваемого транспортного средства на основании положения рассматриваемого транспортного средства и информации карты с помощью функции формирования маршрута движения рассматриваемого транспортного средства. Маршрут движения рассматриваемого транспортного средства представлен центральной линией полосы движения, линией границы полосы движения (границей пути) и/или областью движения. Устройство 180 управления оценивает положение рассматриваемого транспортного средства на карте на основе информации о положении рассматриваемого транспортного средства, обнаруженной устройством 110 обнаружения положения рассматриваемого транспортного средства, и информации карты. Между прочим, устройство 180 управления может вычислить маршрут движения рассматриваемого транспортного средства, используя захваченное изображение камеры 150. Например, устройство 180 управления обнаруживает полосу движения из захваченных изображений сбоку и/или впереди рассматриваемого транспортного средства. Устройство 180 управления может формировать маршрут движения рассматриваемого транспортного средства, идентифицируя обнаруженную границу как линию границы полосы движения.
[0021]
Устройство 180 управления обнаруживает положение другого транспортного средства с помощью функции идентификации полосы движения другого транспортного средства, чтобы идентифицировать полосу движения, по которой движется другое транспортное средство. Устройство 180 управления использует датчик 140 измерения расстояния и/или камеру 150 для обнаружения положения другого транспортного средства, присутствующего около рассматриваемого транспортного средства. Устройство 180 управления использует информацию карты, чтобы идентифицировать полосы движения около рассматриваемого транспортного средства. Устройство 180 управления вычисляет положение другого транспортного средства на карте, используя результат обнаружения обнаруженного другого транспортного средства, и идентифицирует полосу движения, принадлежащую текущему положению другого транспортного средства. Например, устройство 180 управления периодически обнаруживает информацию о положении другого транспортного средства и вычисляет траекторию обнаруженного положения в качестве траектории движения другого транспортного средства. Устройство 180 управления затем идентифицирует полосы движения, расположенные около рассматриваемого транспортного средства, по данным линии границы полосы движения, включенным в информацию карты. Когда вычисленный маршрут движения другого транспортного средства зажат между линиями границ полос движения, устройство 180 управления идентифицирует полосу движения, к которой принадлежит другое транспортное средство, по линиям границ полос движения, охватывающим траекторию движения другого транспортного средства. Между прочим, при идентификации полосы движения другого транспортного средства вычисление маршрута движения другого транспортного средства не обязательно. Например, устройство 180 управления обнаруживает положение другого транспортного средства с помощью датчика 140 измерения расстояния и/или камеры 150 и выделяет полосу движения, расположенную около рассматриваемого транспортного средства, из информации карты. Устройство 180 управления идентифицирует полосу движения, которой принадлежит положение обнаруженного другого транспортного средства, как полосу движения другого транспортного средства, из выделенных полос.
[0022]
Устройство 180 управления вычисляет смещение положения другого транспортного средства в пределах полосы движения другого транспортного средства с помощью функции вычисления смещения. Смещение положения другого транспортного средства (в дальнейшем именуемое просто «смещением») представляет смещение другого транспортного средства в направлении ширины транспортного средства по отношению к центральной линии полосы движения. Например, когда текущее положение другого транспортного средства находится рядом с центральной линией транспортного средства, смещение уменьшается. С другой стороны, когда текущее положение другого транспортного средства находится на стороне линии границы полосы движения, которая является правой стороной от центральной линии полосы движения, смещение увеличивается с правой стороны в направлении ширины транспортного средства. Смещение другого транспортного средства соответствует отклонению (несовпадению) другого транспортного средства в направлении ширины транспортного средства относительно линии границы полосы движения. Устройство 180 управления вычисляет отклонение (разность) в направлении ширины транспортного средства между вычисленной траекторией движения другого транспортного средства и центральной линией или линией границы полосы движения, к которой принадлежит другое транспортное средство, как смещение другого транспортного средства.
[0023]
С помощью функции формирования и коррекции траектории движения устройство 180 управления вычисляет траекторию движения рассматриваемого транспортного средства, которая становится целевой траекторией, когда рассматриваемое транспортное средство движется по маршруту движения рассматриваемого транспортного средства, и корректирует траекторию движения рассматриваемого транспортного средства в пределах полосы движения маршрута движения рассматриваемого транспортного средства в соответствии с вычисленным смещением. Когда положение другого транспортного средства не смещено в сторону рассматриваемого транспортного средства, например, устройство 180 управления задает (вычисляет) траекторию движения в центре между линиями границ полосы движения, указывающими маршрут движения рассматриваемого транспортного средства. Устройство 180 управления, с другой стороны, корректирует траекторию движения рассматриваемого транспортного средства так, чтобы траектория движения рассматриваемого транспортного средства находилась в стороне от траектории движения другого транспортного средства, когда положение другого транспортного средства смещено в сторону рассматриваемого транспортного средства, так что другое транспортное средство приближается к рассматриваемому транспортному средству, в то время как другое транспортное средство движется по соседней полосе движения относительно рассматриваемого транспортного средства.
[0024]
Управляя приводным механизмом 170 с помощью функции управления движением, устройство 180 управления выполняет управление автономным вождением, которое автономно выполняет все или часть движения рассматриваемого транспортного средства, так что рассматриваемое транспортное средство движется по целевой траектории движения. Когда траектория движения корректируется посредством функции формирования и коррекции траектории движения, целевая траектория при движении рассматриваемого транспортного средства является скорректированной траекторией движения. Например, устройство 180 управления управляет исполнительным механизмом рулевого управления и т.п. рассматриваемого транспортного средства, так что рассматриваемое транспортное средство движется по вычисленной траектории движения посредством функции управления движением. Кроме того, устройство 180 управления управляет работой приводного механизма 170, такого как двигатель, тормоз и исполнительный механизм рулевого управления, когда едущее впереди транспортное средство существует впереди рассматриваемого транспортного средства, так что расстояние от транспортного средства до транспортного средства между рассматриваемым транспортным средством и едущим впереди транспортным средством задается равным расстоянию от транспортного средства до транспортного средства, заданному посредством функции задания расстояния от транспортного средства до транспортного средства, и рассматриваемое транспортное средство движется, чтобы следовать траектории движения, пройденной едущим впереди транспортным средством. Кроме того, устройство 180 управления управляет работой приводного механизма 170, такого как двигатель или тормоз, для выполнения управления движением, которое заставляет рассматриваемое транспортное средство двигаться с предварительно определенной заданной скоростью, заданной водителем. Между прочим, управление автономным вождением с помощью функции управления движением выполняется в соответствии с законами и правилами дорожного движения каждой страны.
[0025]
Далее описывается процесс управления для содействия движению транспортного средства. Фиг. 2 - схема, иллюстрирующая пример сцены, в которой выполняется процесс управления согласно настоящему варианту осуществления. В качестве примера описывается дорожная ситуация, когда автомобиль проезжает с правой стороны. На фиг. 2 «A» представляет рассматриваемое транспортное средство, а «B» - другое транспортное средство. Как показано на фиг. 2, на перекрестке линия границы полосы движения не нарисована на дороге сплошной линией и т.п., и линия границы полосы движения не может быть идентифицирована при визуальном осмотре водителем или обнаружении камерой и т.п. В примере на фиг. 2 рассматриваемое транспортное средство поворачивает на таком перекрестке влево, а другое транспортное средство движется бок о бок с рассматриваемым транспортным средством по левой стороне от рассматриваемого транспортного средства и поворачивает на перекрестке влево, как и рассматриваемое транспортное средство. В это время другое транспортное средство движется, приближаясь к рассматриваемому транспортному средству.
[0026]
Фиг. 3 - блок-схема, иллюстрирующая последовательность операций процесса управления настоящего варианта осуществления. Процесс управления движением, описанный ниже, выполняется устройством 180 управления. Кроме того, описанный ниже процесс управления движением начинается, когда включается переключатель зажигания или переключатель питания, и выполняется повторно (например, каждые 10 миллисекунд) в заранее определенном цикле, пока переключатель зажигания или переключатель питания не будет выключен.
[0027]
Следующее объяснение основано на примерной сцене, в которой управление автономным движением вводится (включается) водителем. То есть водитель включает управление автономным движением посредством устройства 160 ввода, таким образом, управление автономным движением выполняется так, что рассматриваемое транспортное средство движется по вычисленной траектории движения.
[0028]
На этапе S101 устройство 180 управления получает информацию о положении рассматриваемого транспортного средства, обнаруженном устройством 110 обнаружения положения рассматриваемого транспортного средства, и получает информацию карты из базы 120 данных карт. Основываясь на информации о положении и информации карты рассматриваемого транспортного средства, устройство 180 управления идентифицирует, по какой полосе движения рассматриваемое транспортное средство движется на карте, и получает информацию об идентифицированной полосе движения из информации карты. Кроме того, устройство 180 управления генерирует маршрут движения рассматриваемого транспортного средства на основании полученных данных о полосе движения и информации о положении рассматриваемого транспортного средства.
[0029]
На этапе S102 устройство 180 управления получает информацию о полосе движения около рассматриваемого транспортного средства на основе текущей информации о положении рассматриваемого транспортного средства и информации карты. Информация о полосе движения - это информация о линии границы полосы движения и/или информация о центральной линии полосы движения. Устройство 180 управления может получать информацию о полосе движения как информацию о зоне, охватываемой линиями.
[0030]
На этапе S103 устройство 180 управления получает информацию о положении других транспортных средств, расположенных около рассматриваемого транспортного средства, с помощью датчика 140 измерения расстояния и т.п. Устройство 180 управления получает информацию о положении с помощью датчика 140 измерения расстояния. Устройство 180 управления также может использовать, не ограничиваясь датчиком 140 измерения расстояния, например, результат распознавания объекта камерой 150, результат распознавания объекта радаром или результат кластеризации лидара для получения информации о положении. То есть устройство 180 управления обнаруживает положение другого транспортного средства, движущегося по полосе движения, которая расположена в направлении ширины транспортного средства по отношению к рассматриваемому транспортному средству, с помощью датчика 140 измерения расстояния и т.п.
[0031]
На этапе S104 устройство 180 управления идентифицирует, по какой полосе движения другое транспортное средство движется на карте, на основе информации о положении другого транспортного средства и информации карты, и получает информацию о полосе движения, идентифицированной из информации карты.
[0032]
На этапе S105 устройство 180 управления определяет, по какой полосе движения другое транспортное средство движется на карте, на основе информации о положении другого транспортного средства и информации карты. Устройство 180 управления определяет, является ли идентифицированная полоса движения, по которой движется другое транспортное средство, соседней полосой движения. Соседняя полоса движения - это полоса, расположенная справа или слева от полосы движения, по которой движется рассматриваемое транспортное средство.
[0033]
Когда полоса движения другого транспортного средства является соседней полосой движения, на этапе S106 устройство 180 управления вычисляет смещение положения другого транспортного средства в полосе движения. Устройство 180 управления получает информацию о соседней полосе движения (полосе движения, расположенной в направлении ширины транспортного средства по отношению к рассматриваемому транспортному средству) из базы 120 данных карт. Соседняя полоса движения отделена линиями границ полосы движения. Информация о линии границы полосы движения обозначена последовательностью точек. Каждая точка, включенная в последовательность точек, представлена координатой положения на карте. Линия, соединяющая последовательные координаты положения, соответствует линиям границы полосы движения. Линия границы полосы движения представляет собой левую и правую границы соседней полосы движения соответственно, а центральная линия пары линий границы полосы движения является центральной линией полосы движения. Кроме того, устройство 180 управления вычисляет траекторию движения другого транспортного средства на основе временного перемещения координат положения другого транспортного средства. Затем устройство 180 управления вычисляет отклонение (дельту положения) между траекторией движения другого транспортного средства и центральной линией полосы движения. Отклонение положения - это отклонение в направлении ширины транспортного средства. Например, как показано на фиг. 2, когда другое транспортное средство движется влево согласно изогнутой линии, направление ширины транспортного средства является радиальным направлением радиуса кривизны. Таким образом, устройство 180 управления вычисляет смещение другого транспортного средства. Когда полоса движения другого транспортного средства не является соседней полосой движения, устройство 180 управления выполняет этап S112 потока управления.
[0034]
На этапе S107 устройство 180 управления определяет, соответствует ли смещение стороне рассматриваемого транспортного средства. Устройство 180 управления вычисляет направление смещения в положении другого транспортного средства в пределах полосы движения, используя положительные и отрицательные значения. Затем устройство 180 управления определяет, находится ли смещение на стороне рассматриваемого транспортного средства, на основании соотношения между положительным и отрицательным смещением и текущим положением рассматриваемого транспортного средства. Например, в примере, показанном на фиг. 2, когда другое транспортное средство движется наружу относительно центральной линии полосы движения, устройство 180 управления вычисляет смещение так, чтобы отклонение положения было положительным. С другой стороны, на фиг. 2, когда другое транспортное средство движется внутрь относительно центральной линии полосы движения, устройство 180 управления вычисляет смещение так, чтобы отклонение положения было отрицательным. Когда рассматриваемое транспортное средство движется по полосе движения за пределами полосы движения другого транспортного средства, и смещение является положительным значением, устройство 180 управления определяет, что смещение находится на стороне рассматриваемого транспортного средства. Устройство 180 управления определяет, что смещение не соответствует стороне рассматриваемого транспортного средства, когда рассматриваемое транспортное средство движется по полосе движения за пределами полосы движения другого транспортного средства, и смещение является отрицательным значением. Когда рассматриваемое транспортное средство движется по полосе движения внутри полосы движения другого транспортного средства и смещение является отрицательным значением, устройство 180 управления определяет, что смещение находится на стороне рассматриваемого транспортного средства. Устройство 180 управления определяет, что смещение не на стороне рассматриваемого транспортного средства, когда рассматриваемое транспортное средство движется по полосе движения внутри полосы движения другого транспортного средства, и смещение является положительным значением.
[0035]
Когда определяется, что смещение происходит на стороне рассматриваемого транспортного средства, на этапе S108 устройство 180 управления вычисляет опорную точку для сдвига линии границы полосы движения рассматриваемого транспортного средства. Когда определено, что смещения нет или когда определено, что смещение не на стороне рассматриваемого транспортного средства, устройство 180 управления выполняет этап S112 процесса управления. Опорная точка для сдвига используется для определения направления сдвига (направления коррекции) последовательности точек, указывающей линию границы полосы движения. Опорная точка для сдвига задается в зависимости от формы маршрута движения. Например, как показано на фиг. 2, устройство 180 управления задает опорную точку для сдвига в центре кривизны криволинейной линии границы полосы движения, когда маршрут движения рассматриваемого транспортного средства является криволинейным. Когда маршрут движения рассматриваемого транспортного средства является линейным, устройство 180 управления задает опорную точку для сдвига в текущем положении рассматриваемого транспортного средства или в точке на маршруте движения рассматриваемого транспортного средства.
[0036]
В дальнейшем этапы S108-S112 процесса управления поясняются со ссылкой на фиг. 2 и фиг. 4. Фиг.4 - концептуальная схема, поясняющая центральную линию соседней полосы движения и линию границы полосы движения, по которой движется рассматриваемое транспортное средство (линия границы полосы движения). Фиг. 4 соответствует сцене на Фиг. 2. Линия границы полосы движения маршрута движения рассматриваемого транспортного средства A, показанная на фиг. 2, соответствует линии границы полосы движения, показанной на фиг. 4, а центральная линия полосы движения на маршруте движения другого транспортного средства B, показанная на фиг. 2, соответствует соседней центральной линии, показанной на фиг. 4. Маршрут движения рассматриваемого транспортного средства A является частью области S2, показанной на фиг. 4, которая является маршрутом, отделенным нескорректированной линией L2 границы полосы движения и линией L3 границы полосы движения. Маршрут движения другого транспортного средства B является частью области S1, показанной на фиг. 4, которая представляет собой маршрут, отделенный линией L1 границы полосы движения и нескорректированной линией L2 границы полосы движения. Между прочим, информация о линии границы полосы движения и центральной линии соседней полосы движения, показанная пунктирной линией на фиг.4, включается в информацию карты базы 102 данных карт.
[0037]
Устройство 180 управления задает точку С, показанную на фиг. 4, в качестве опорной точки для сдвига посредством выполнения этапа S108 потока управления. То есть, как показано на фиг. 4, центр окружности, полученный посредством аппроксимации окружности центральной линии C для сдвига, является опорной точкой для сдвига.
[0038]
На этапе S109 устройство 180 управления вычисляет величину сдвига для каждой точки последовательности точек, представляющей траекторию движения рассматриваемого транспортного средства. Во-первых, устройство 180 управления идентифицирует целевую область коррекции для корректировки траектории движения рассматриваемого транспортного средства на основе информации карты и/или данных, обнаруженных датчиками, такими как датчик 104 измерения расстояния. Устройство 180 управления задает область, например в пределах перекрестка, на которой не нарисована полоса движения, в качестве целевой области коррекции. Целевая область коррекции не обязательно является областью без полосы движения на поверхности дороги и может быть областью, в которой трудно обнаружить полосу движения, или областью, в которой полоса движения не обнаруживается на захваченном изображении камеры 150. Кроме того, когда трудно обнаружить полосу движения из-за погодных условий или тому подобного, устройство 180 управления может задать окружность перед рассматриваемым транспортным средством в качестве целевой области коррекции. В примерах на фиг.2 и 4 устройство 180 управления задает перекресток в целевую область коррекции. Между прочим, целевая область коррекции не обязательно задается.
[0039]
Устройство 180 управления вычисляет отклонение между траекторией движения другого транспортного средства и центральной линией полосы движения, по которой другое транспортное средство движется в целевой области коррекции, на основе информации карты. Отклонение - это отклонение в радиальном направлении окружности вокруг опорной точки для сдвига C. Устройство 180 управления вычисляет отклонение для каждой точки последовательности точек, представляющей траекторию движения другого транспортного средства. Кроме того, устройство 180 управления задает наибольшее отклонение из отклонений для каждой точки, вычисленной в целевой области коррекции, равным наибольшему расстоянию сдвига (Dmax).
[0040]
Устройство 180 управления идентифицирует начальную точку и конечную точку линии границы полосы движения маршрута движения рассматриваемого транспортного средства в целевой области коррекции. В примерах на фиг. 2 и фиг. 4 рассматриваемое транспортное средство движется прямо к перекрестку, поворачивает налево в пределах перекрестка и движется по полосе, на которую данное транспортное средство въезжает после левого поворота. В это время начальная точка линии границы движения маршрута движения рассматриваемого транспортного средства задается на въезде перекрестка, а конечная точка задается на выезде из перекрестка. В примере на фиг. 4 точка Ps является начальной точкой, а точка Pe - конечной точкой. Другими словами, устройство 180 управления задает начальную точку и конечную точку соответственно в конце области, перекрывающей маршрут движения рассматриваемого транспортного средства в целевой области коррекции. Кроме того, устройство 180 управления задает центральную точку между начальной точкой и конечной точкой на линии границы полосы движения маршрута движения рассматриваемого транспортного средства. Центральная точка устанавливается на линии границы полосы движения посередине между начальной и конечной точками. Между прочим, центральная точка не обязательно является средней точкой. Например, когда линия границы полосы движения частично раздута относительно окружности, полученной путем аппроксимации окружности вокруг центральной линии для сдвига C, в положении, в котором радиус является наибольшим по отношению к точке C, положение может быть задано в качестве центральной точки. В примере на фиг. 4 точка P3 является центральной точкой.
[0041]
Устройство 180 управления вычисляет функцию величины сдвига, так что величина сдвига равна нулю в начальной и конечной точках, а величина сдвига становится максимальной в центральной точке (Dmax).
[0042]
Фиг. 5 - график, представляющий соотношение величины сдвига относительно точек на линии границы полосы движения. На графике, показанном на фиг. 5, горизонтальная ось указывает положение на линии границы полосы движения, вертикальная ось указывает коэффициент сдвига. Коэффициент сдвига равен нулю в начальной точке, пропорционально увеличивается от начальной точки к средней точке и достигает пика в средней точке (1.0). Затем коэффициент сдвига пропорционально уменьшается от средней точки к конечной точке и становится нулевым в конечной точке.
[0043]
Устройство 180 управления вычисляет величину сдвига (d(i)) для каждой точки линии границы полосы движения, которая указывает маршрут движения рассматриваемого транспортного средства, используя соотношение коэффициента величины сдвига, как показано на фиг.5, в соответствии со следующим уравнением (1).
d(i) = Dmax × коэффициент(i) (1)
Между прочим, «i» представляет собой порядок точек, которые должны быть нанесены на график для каждого заранее определенного расстояния или заранее определенного периода вычисления на линии границы полосы движения. Точка, в которой «i» равно 0, становится начальной точкой, а «i» увеличивается по направлению к конечной точке в натуральных числах.
[0044]
На этапе S110 устройство 180 управления вычисляет вектор (V(i)) для каждой точки от центральной точки сдвига C к каждой точке последовательности точек, указывающей линию границы полосы движения рассматриваемого транспортного средства. В примере на фиг.4 устройство 180 управления вычисляет вектор V(i) с длиной d(i) от центральной точки для сдвига C к каждой точке на линии границы полосы движения (Ps, P1 ... P8, Pe).
[0045]
На этапе S111 устройство 180 управления смещает каждую точку на линии границы полосы движения (Ps, P1 ... P8, Pe) согласно соответствующему вектору V(i). В примере на фиг.4 устройство 180 управления вычисляет вектор P’(i) в направлении каждой точки после сдвига (после коррекции) (P’s, P’1 ... P’8, P’e) путем добавления вектора (i) к вектору P(i) по направлению к каждой точке (Ps, P1 ... P8, Pe) от центральной точки сдвига C, как показано в следующем уравнении (2).
P’(i) = P(i) + V(i) (2)
[0046]
Линия, соединяющая точки после сдвига (после коррекции) (P’s, P’1 ... P’8, P’e) становится скорректированной линией L2’ границы для рассматриваемого транспортного средства. Как показано на фиг. 4, скорректированная линия границы полосы движения проходит через начальную точку (Ps) и конечную точку (Pe).
[0047]
Когда на этапе S106 определяется, что полоса движения другого транспортного средства не является соседней полосой движения, и когда на этапе S107 определяется, что смещение не существует, или определяется, что смещение не относится к рассматриваемому транспортному средству на этапе S112 устройство 180 управления вычисляет траекторию движения рассматриваемого транспортного средства на основании линии границы полосы движения маршрута движения рассматриваемого транспортного средства. С другой стороны, когда на этапе S107 определяется, что смещение происходит на стороне рассматриваемого транспортного средства, на этапе S112 устройство 180 управления корректирует траекторию движения рассматриваемого транспортного средства на основе скорректированной линии границы полосы движения. В примере на фиг.4 устройство 180 управления вычисляет центральную линию Q0 между нескорректированной линией L2 границы полосы движения с левой стороны и линией границы полосы движения с правой стороны в качестве траектории движения рассматриваемого транспортного средства относительно направления, в котором рассматриваемое транспортное средство движется. С другой стороны, устройство 180 управления вычисляет центральную линию Q1 между скорректированной линией границы полосы движения с левой стороны и линией границы полосы движения с правой стороны в качестве скорректированной траектории движения рассматриваемого транспортного средства. В примере, показанном на фиг. 4, линия границы полосы движения с левой стороны корректируется, чтобы она находилась в стороне от другого транспортного средства, однако линия границы полосы движения с правой стороны не корректируется. Следовательно, область с возможностью движения рассматриваемого транспортного средства, определяемая парой линий границ полосы движения, уменьшается в направлении ширины транспортного средства в соответствии с величиной смещения. Область с возможностью движения определяет маршрут, по которому рассматриваемое транспортное средство может двигаться, в качестве области, и соответствует маршруту, отделенному скорректированной линией L2’ границы полосы движения и нескорректированной линией L3 границы полосы движения. Центральная линия скорректированной области с возможностью движения (линия вдоль направления движения рассматриваемого транспортного средства) является траекторией Q1 движения рассматриваемого транспортного средства. Эта траектория движения является целевой траекторией, когда рассматриваемое транспортное средство движется по маршруту движения рассматриваемого транспортного средства.
[0048]
В примере на фиг. 4 устройство 180 управления может вычислить линию, смещенную наружу на заранее определенную длину относительно скорректированной линии границы полосы движения, как траекторию движения рассматриваемого транспортного средства.
[0049]
В примере на фиг.4 устройство 180 управления может корректировать линию границы полосы движения с правой стороны в дополнение к коррекции для линии границы полосы движения с левой стороны и может вычислять центральную линию пары скорректированных линий границ полосы движения как траекторию движения рассматриваемого транспортного средства. Линия границы полосы движения с правой стороны может быть скорректирована таким же образом, как и в потоке управления, описанном на этапах S108-S111. Таким образом, когда одна из линий границ полосы движения корректируется для уменьшения протяженности области с возможностью движения рассматриваемого транспортного средства в направлении ширины транспортного средства, устройство 180 управления может корректировать другую линию границы полосы движения, чтобы расширить область (внешнюю область в примере на фиг. 4), расположенную напротив уменьшенной области (внутренняя область в примере на фиг. 4) в области с возможностью движения. Центральная линия скорректированной области с возможностью движения (вдоль направления движения рассматриваемого транспортного средства) становится траекторией движения рассматриваемого транспортного средства. Это гарантирует безопасность области с возможностью движения. Между прочим, траектория движения рассматриваемого транспортного средства не обязательно является центральной линией области с возможностью движения и может быть вычислена в пределах области с возможностью движения.
[0050]
На этапе S113 устройство 180 управления вычисляет величину управления исполнительным механизмом рулевого управления и т.п., так что целевая траектория, когда рассматриваемое транспортное средство движется по маршруту движения рассматриваемого транспортного средства, становится траекторией движения, вычисленной в процессе управления на этапе S112.
[0051]
На этапе S114 устройство 180 управления выполняет управление движением рассматриваемого транспортного средства, управляя приводным механизмом 170 с вычисленной величиной управления. На этом поток управления, показанный на фиг. 3, заканчивается. Как описано выше, в настоящем варианте осуществления, когда определяется, что другое транспортное средство движется, чтобы приблизиться к рассматриваемому транспортному средству, которое движется параллельно с другим транспортным средством на перекрестке и т.п., в которых линия границы полосы движения не нарисована четко, траектория движения рассматриваемого транспортного средства корректируется так, чтобы быть дальше от другого транспортного средства, так что можно предотвратить случай, в котором расстояние между рассматриваемым транспортным средством и другим транспортным средством в направлении ширины транспортного средства сокращается.
[0052]
Как описано выше, в настоящем варианте осуществления маршрут движения рассматриваемого транспортного средства корректируется посредством: формирования маршрута движения рассматриваемого транспортного средства на основе информации карты; вычисления траектории движения рассматриваемого транспортного средства, которая должна быть целевой траекторией, когда рассматриваемое транспортное средство движется по маршруту движения рассматриваемого транспортного средства; обнаружения положения другого транспортного средства, движущегося по полосе движения, расположенной в направлении ширины рассматриваемого транспортного средства, посредством датчика; вычисления смещения положения другого транспортного средства в полосе движения, по которой движется другое транспортное средство, на основе положения другого транспортного средства; и корректировки траектории движения рассматриваемого транспортного средства в соответствии с вычисленным смещением. Это позволяет правильно скорректировать траекторию движения в тех случаях, когда на поверхности дороги не нарисована линия сегмента (линия границы полосы движения) или когда линия сегмента не обнаруживается должным образом. Кроме того, например, когда положение другого транспортного средства, движущегося по соседней полосе движения, приближается к положению рассматриваемого транспортного средства, может быть вычислена траектория движения, по которой рассматриваемое транспортное средство удаляется от другого транспортного средства.
[0053]
В настоящем варианте осуществления маршрут движения рассматриваемого транспортного средства формируется на основе информации о линии границы полосы движения, включенной в информацию карты, или информации об области движения, включенной в информацию карты. Это позволяет вычислить траекторию движения рассматриваемого транспортного средства в пределах области, включающей маршрут движения рассматриваемого транспортного средства.
[0054]
В настоящем варианте осуществления траектория движения другого транспортного средства вычисляется с использованием данных, обнаруженных датчиком, и смещение вычисляется на основе траектории движения другого транспортного средства. Это позволяет вычислить смещение другого транспортного средства в определенной точке и историю смещения, так что повышается точность вычисления при вычислении смещения положения другого транспортного средства.
[0055]
В настоящем варианте осуществления полоса движения другого транспортного средства идентифицируется на основе информации карты, и по меньшей мере одно из отклонения для центра полосы движения другого транспортного средства и отклонения для границы полосы движения другого транспортного средства вычисляется как отклонение положения другого транспортного средства. Это позволяет повысить точность вычисления смещения положения другого транспортного средства.
[0056]
Кроме того, в настоящем варианте осуществления на основе по меньшей мере одного из информации карты и данных, обнаруженных датчиком, задается целевая область коррекции для корректировки траектории движения и задается либо начальная точка, либо конечная точка области, перекрывающейся маршрут движения рассматриваемого транспортного средства в целевой области коррекции, в качестве фиксированной точки. Скорректированная траектория движения рассматриваемого транспортного средства проходит через фиксированную точку. За счет фиксации конечных точек области, граница которой нечеткая, можно предотвратить отклонение траектории движения в конечной точке участка. То есть непрерывность траектории движения может поддерживаться до и после целевой области коррекции.
[0057]
В этом варианте осуществления траектория движения рассматриваемого транспортного средства корректируется в направлении ширины рассматриваемого транспортного средства. Это позволяет корректировать траекторию движения рассматриваемого транспортного средства для всего участка в том участке, на котором линия границы полосы движения нечеткая.
[0058]
В настоящем варианте осуществления полоса движения другого транспортного средства идентифицируется на основе информации карты, и определяется, смещено ли положение другого транспортного средства к стороне рассматриваемого транспортного средства на полосе движения другого транспортного средства. Когда определено, что положение другого транспортного средства смещено к стороне рассматриваемого транспортного средства, область с возможностью движения корректируется так, что область с возможностью движения на маршруте движения рассматриваемого транспортного средства уменьшается в соответствии с величиной смещения. Это позволяет вычислить траекторию движения так, чтобы рассматриваемое транспортное средство удалялось от другого транспортного средства, когда положение другого транспортного средства, движущегося по соседней полосе движения, приближается к рассматриваемому транспортному средству.
[0059]
В настоящем варианте осуществления центральная линия скорректированной области с возможностью движения вычисляется как траектория движения рассматриваемого транспортного средства. В настоящем варианте осуществления траектория движения рассматриваемого транспортного средства может быть вычислена в пределах скорректированной области с возможностью движения. Это позволяет вычислить траекторию движения так, чтобы рассматриваемое транспортное средство удалялось от другого транспортного средства, например, когда положение другого транспортного средства, движущегося по соседней полосе движения, приближается к стороне рассматриваемого транспортного средства.
[0060]
В настоящем варианте осуществления верхнее предельное значение может быть задано для величины сдвига. Например, верхнее предельное значение предварительно задано для максимальной величины сдвига (Dmax). Устройство 180 управления вычисляет отклонение для каждой точки последовательности точек, указывающей траекторию движения другого транспортного средства, посредством процесса управления на этапе S109, и вычисляет максимальное отклонение, которое является наибольшим из отклонений, вычисленных для каждой точки. Что касается соответствия между максимальным отклонением и максимальной величиной сдвига (Dmax), чем больше максимальное отклонение, тем больше становится максимальная величина сдвига (Dmax). Устройство 180 управления вычисляет максимальную величину сдвига (Dmax), соответствующую максимальному отклонению, и сравнивает максимальную величину сдвига (Dmax) с верхним предельным значением. Когда максимальная величина сдвига (Dmax) больше, чем верхнее предельное значение, устройство 180 управления ограничивает максимальную величину сдвига (Dmax) до верхнего предельного значения. Устройство 180 управления использует ограниченную максимальную величину сдвига (Dmax) в уравнении (1). Это препятствует тому, чтобы область с возможностью движения рассматриваемого транспортного средства была слишком узкой, поскольку верхнее предельное значение предусмотрено для величины коррекции траектории движения рассматриваемого транспортного средства.
[0061]
В этом варианте осуществления, когда область с возможностью движения уменьшается в направлении ширины транспортного средства путем корректировки траектории движения рассматриваемого транспортного средства, и протяженность скорректированной области с возможностью движения в направлении ширины транспортного средства меньше, чем ширина рассматриваемого транспортного средства, устройство 180 управления может расширять область, расположенную на противоположной стороне от уменьшенной области в направлении ширины транспортного средства в области с возможностью движения. Это гарантирует безопасность области с возможностью движения рассматриваемого транспортного средства.
[0062]
В настоящем варианте осуществления траектория движения другого транспортного средства не обязательно вычисляется, когда смещение положения другого транспортного средства вычисляется посредством функции вычисления смещения, а также на этапах S106 и S107 потока управления. Устройство 180 управления вычисляет расстояние между положением другого транспортного средства, обнаруженным датчиком 104 измерения расстояния или камерой 105, и положением линии границы полосы движения. Расстояние - это протяженность в направлении ширины транспортного средства. Устройство 180 управления вычисляет смещение положения другого транспортного средства, идентифицируя ширину полосы движения другого транспортного средства из информации карты и сравнивая величину ширины с вычисленным расстоянием. В качестве примера, устройство 180 управления задает линию границы полосы движения с правой стороны из пары линий границы полосы движения другого транспортного средства в качестве опорной линии. Устройство 180 управления вычисляет расстояние от опорной линии до положения другого транспортного средства. Чем короче вычисленное расстояние, тем дальше положение другого транспортного средства смещается к линии границы полосы движения с правой стороны. Когда вычисленное расстояние составляет примерно половину ширины полосы движения, положение другого транспортного средства находится около центральной линии полосы движения. Чем больше вычисленное расстояние, тем дальше положение другого транспортного средства смещается к линии границы полосы движения с левой стороны. Таким образом, устройство 180 управления может вычислить расстояние до положения другого транспортного средства в направлении ширины транспортного средства, с помощью линии границы полосы движения в качестве опорной линии, и вычисляет смещение положения другого транспортного средства в полосе движения другого транспортного средства в соответствии с вычисленным расстоянием. Между прочим, опорная линия может быть линией границы полосы движения с левой стороны, или центральной линией полосы движения.
[0063]
В модификации настоящего варианта осуществления величина сдвига может быть вычислена в соответствии с отклонением, вычисленным в заранее определенный период времени с периодом вычисления, без задания функционального выражения величины сдвига в целевой области коррекции. Например, соответствие между величиной отклонения и величиной значения сдвига определяется заранее, и устройство 180 управления сохраняет соответствие в виде таблицы. В примере на фиг.4 устройство 180 управления вычисляет отклонение в каждой точке от точки (Ps) до точки (Pe) на линии границы полосы движения и вычисляет величину сдвига в соответствии с отклонением, вычисленным путем обращения к таблице соответственно. Кроме того, устройство 180 управления корректирует траекторию движения рассматриваемого транспортного средства в соответствии с вычисленной величиной сдвига. Таким образом, например, когда отклонение изменяется в целевой области коррекции, величина сдвига также изменяется в соответствии с изменением отклонения, и скорректированная траектория движения также изменяется. То есть в настоящем варианте осуществления область с возможностью движения корректируется таким образом, что область с возможностью движения на маршруте движения рассматриваемого транспортного средства расширяется, когда величина смещения уменьшается после того, как область с возможностью движения на маршруте движения рассматриваемого транспортного средства уменьшается в соответствии с величиной смещения. Таким образом, когда отклонение становится меньше после коррекции траектории движения, маршрут движения рассматриваемого транспортного средства может быть приближен к исходной форме за счет уменьшения величины коррекции для области с возможностью движения.
[0064]
В вышеупомянутой модификации величина области с возможностью движения изменяется путем корректировки траектории движения в соответствии с изменением отклонения, однако размер области с возможностью движения может сохраняться в течение заранее определенного периода после корректировки области с возможностью движения. Заранее определенный период - это, например, время, в течение которого рассматриваемое транспортное средство движется по целевой области коррекции. Это позволяет запретить изменение области с возможностью движения после коррекции.
[0065]
В модификации настоящего варианта осуществления на этапе S113 и этапе S114 процесса управления устройство 180 управления может снижать скорость транспортного средства рассматриваемого транспортного средства меньше, чем текущая скорость транспортного средства, когда протяженность скорректированной области с возможностью движения в направлении ширины транспортного средства короче ширины рассматриваемого транспортного средства. Таким образом, можно препятствовать приближению рассматриваемого транспортного средства к другому транспортному средству путем уменьшения скорости транспортного средства для рассматриваемого транспортного средства.
[0066]
Процесс управления устройством управления согласно настоящему варианту осуществления может выполняться не только тогда, когда текущее положение рассматриваемого транспортного средства и/или текущее положение другого транспортного средства включены в целевую область коррекции, но также когда текущее положение рассматриваемого транспортного средства и/или текущее положение другого транспортного средства находятся вне целевой области коррекции, например, когда рассматриваемое транспортное средство приближается к целевой области коррекции. Например, в примере на фиг.2, когда рассматриваемое транспортное средство приближается к перекрестку, устройство 180 управления вычисляет положение другого транспортного средства, расположенного на полосе движения рассматриваемого транспортного средства, и вычисляет отклонение относительно положения другого транспортного средства. Затем устройство 180 управления вычисляет величину сдвига относительно вычисленного отклонения. Устройство 180 управления дополнительно корректирует траекторию движения рассматриваемого транспортного средства в целевой области коррекции, используя вычисленную величину сдвига.
<<Второй вариант осуществления>>
[0067]
Объясняется устройство 100 управления движением и способ управления движением согласно другому варианту осуществления настоящего изобретения. В настоящем варианте осуществления по отношению к первому варианту осуществления он отличается тем, что величина сдвига для каждой точки последовательности точек, указывающей траекторию движения рассматриваемого транспортного средства, является постоянной величиной. Другие особенности устройства 100 управления движением и процесс управления устройством 180 управления такие же, как и в первом варианте осуществления. Описание первого варианта осуществления включено по мере необходимости.
[0068]
Устройство 180 управления выполняет следующий процесс управления вместо этапа S109 процесса управления первого варианта осуществления. Другие процессы управления такие же, как в первом варианте осуществления. Далее процесс управления поясняется со ссылкой на Фиг.2 и Фиг.6. Фиг.6 - концептуальная схема, поясняющая центральную линию соседней полосы движения и граничную линию (линию границы полосы движения) полосы движения, по которой движется рассматриваемое транспортное средство, и соответствует сцене на Фиг.2. Линия границы полосы движения рассматриваемого транспортного средства A, показанная на фиг.2, соответствует линии границы полосы движения до коррекции, показанной на фиг.6, и центральная линия полосы движения на маршруте движения другого транспортного средства B, показанная на Фиг. 2, соответствует центральной линии соседней полосы движения, показанной на Фиг. 6. Между прочим, информация о линии границы полосы движения и центральной линии соседней полосы движения, показанная пунктирными линиями на фиг.6, включена в информацию карты базы 102 данных карт.
[0069]
Сначала устройство 180 управления идентифицирует целевую область коррекции, чтобы скорректировать траекторию движения рассматриваемого транспортного средства на основе информации карты и/или данных, обнаруженных датчиком, таким как датчик 104 измерения расстояния. Поскольку идентификация целевой области коррекции такая же, как и в первом варианте осуществления, ее объяснение опускается.
[0070]
Устройство 180 управления вычисляет отклонение между траекторией движения другого транспортного средства и центральной линией полосы движения другого транспортного средства в целевой области коррекции на основе информации карты. В это время отклонение вычисляется как постоянное значение. Постоянное отклонение - это, например, среднее значение, максимальное значение или минимальное значение отклонения для каждой точки последовательности точек, представляющей траекторию движения другого транспортного средства. Устройство 180 управления вычисляет постоянную величину сдвига (значение смещения), соответствующую постоянному отклонению. Соотношение между отклонением и величиной сдвига задано заранее. Чем больше отклонение, тем больше становится постоянная величина сдвига. Между прочим, верхнее предельное значение может быть задано для постоянной величины сдвига. Верхнее предельное значение может быть задано в соответствии, например, с шириной полосы движения.
[0071]
Устройство 180 управления идентифицирует начальную точку и конечную точку линии границы полосы движения маршрута движения рассматриваемого транспортного средства в целевой области коррекции. Поскольку идентификация начальной и конечной точки линии границы полосы движения такая же, как и в первом варианте осуществления, их описание опускается. Затем устройство 180 управления задает коэффициент сдвига от начальной точки до конечной точки равным фиксированному значению (1,0) и задает величину сдвига соответствующих точек P(i) на постоянное значение.
[0072]
Фиг.7 представляет собой график, представляющий коэффициент величины сдвига относительно точки на линии границы полосы движения. На графике, показанном на фиг. 5, горизонтальная ось указывает положение на линии границы полосы движения, а вертикальная ось указывает коэффициент величины сдвига. Коэффициент величины сдвига зафиксирован на уровне 1,0.
[0073]
Затем устройство 180 управления корректирует траекторию движения рассматриваемого транспортного средства, используя вычисленную величину сдвига. Как показано на фиг. 6, скорректированная линия границы полосы движения смещена наружу на определенную величину сдвига относительно нескорректированной линии границы полосы движения (линия границы полосы движения, указанная в информации карты). Как описано выше, в настоящем варианте осуществления, когда определяется, что другое транспортное средство движется, чтобы приблизиться к рассматриваемому транспортному средству в состоянии, когда рассматриваемое транспортное средство и другое транспортное средство движутся бок о бок на перекрестке и т.п., в котором линия границы полосы движения не показана четко, скорректированная линия границы полосы движения вычисляется путем смещения нескорректированной линии границы полосы движения на определенную величину сдвига наружу. Затем, на основе скорректированной линии границы полосы движения, маршрут движения рассматриваемого транспортного средства полностью корректируется для удаления от других транспортных средств. Это может препятствовать сокращению расстояния между рассматриваемым транспортным средством и другим транспортным средством в направлении ширины транспортного средства.
[0074]
Как описано выше, в настоящем варианте осуществления траектория движения рассматриваемого транспортного средства корректируется, поскольку предполагается, что смещение является постоянным значением в целевой области коррекции. Таким образом, можно запретить резкие изменения траектории движения по отношению к изменению отклонения.
[Описание позиционных обозначений]
[0075]
100 Устройство управления движением
110 Устройство обнаружения положения рассматриваемого транспортного средства
120 База данных карт
130 Датчик скорости транспортного средства
140 Датчик измерения расстояния
150 Камера
160 Устройство ввода
170 Приводной механизм
180 Устройство управления
190 Датчик рысканья
Способ коррекции траектории движения транспортного средства содержит: формирование маршрута движения рассматриваемого транспортного средства, по которому движется рассматриваемое транспортное средство, на основе информации карты, хранящейся в базе данных; вычисление траектории движения рассматриваемого транспортного средства, которая должна быть целевой траекторией, когда рассматриваемое транспортное средство движется по маршруту движения рассматриваемого транспортного средства; обнаружение положения другого транспортного средства, движущегося по полосе движения, расположенной в направлении ширины рассматриваемого транспортного средства, с помощью датчика, предусмотренного для рассматриваемого транспортного средства; вычисление смещения положения другого транспортного средства на полосе движения другого транспортного средства, по которой движется другое транспортное средство, на основе положения другого транспортного средства; и корректировку траектории движения рассматриваемого транспортного средства в соответствии с упомянутым смещением. Благодаря предлагаемому способу траектория движения рассматриваемого транспортного средства может корректироваться в обстоятельствах, когда линия сегмента не предусмотрена на дороге или когда линия сегмента не может быть должным образом обнаружена. 3 н. и 15 з.п. ф-лы, 7 ил.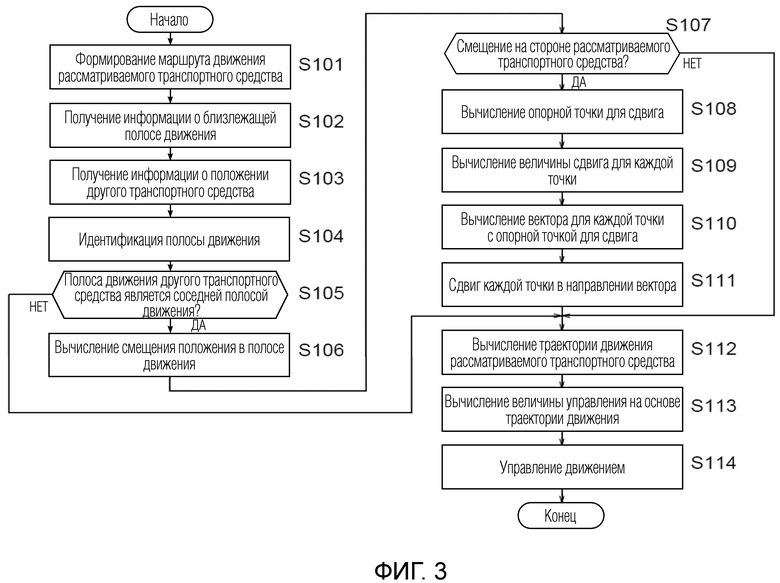
1. Способ коррекции траектории движения транспортного средства, выполняемый устройством управления, имеющим функцию для реализации коррекции траектории движения, когда обнаружение полосы движения посредством датчика, предусмотренного для рассматриваемого транспортного средства, невозможно или затруднено, при этом способ содержит этапы, на которых:
получают информацию карты, включающую в себя информацию о воображаемой полосе движения, из базы данных;
вычисляют траекторию движения рассматриваемого транспортного средства, которая должна быть целевой траекторией, когда рассматриваемое транспортное средство движется по маршруту движения рассматриваемого транспортного средства, на основе информации карты;
обнаруживают положение другого транспортного средства, движущегося по воображаемой полосе движения, расположенной в направлении ширины рассматриваемого транспортного средства, с помощью датчика;
вычисляют смещение положения другого транспортного средства в полосе движения другого транспортного средства, которая является воображаемой полосой движения, по которой движется другое транспортное средство, на основе положения другого транспортного средства; и
корректируют траекторию движения рассматриваемого транспортного средства в соответствии с упомянутым смещением.
2. Способ коррекции траектории движения по п. 1, в котором маршрут движения рассматриваемого транспортного средства формируется на основе информации о границе пути, включенной в информацию карты, или информации об области движения, включенной в информацию карты.
3. Способ коррекции траектории движения по п. 1 или 2, дополнительно содержащий этапы, на которых:
вычисляют траекторию движения другого транспортного средства, когда другое транспортное средство движется по полосе движения другого транспортного средства, с данными, обнаруженными датчиком; и
вычисляют смещение на основе траектории движения другого транспортного средства.
4. Способ коррекции траектории движения по любому из пп. 1-3, дополнительно содержащий этапы, на которых:
идентифицируют полосу движения другого транспортного средства на основе информации карты; и
вычисляют по меньшей мере одно из отклонения полосы движения другого транспортного средства от центра полосы движения и отклонения полосы движения другого транспортного средства от границы полосы движения в качестве смещения.
5. Способ коррекции траектории движения по любому из пп. 1-4, дополнительно содержащий этапы, на которых:
задают целевую область коррекции для коррекции траектории движения рассматриваемого транспортного средства на основе по меньшей мере одного из информации карты и данных, обнаруженных датчиком;
вычисляют смещение положения другого транспортного средства в целевой области коррекции на основе положения другого транспортного средства; и
корректируют траекторию движения рассматриваемого транспортного средства в соответствии со смещением другого транспортного средства в целевой области коррекции.
6. Способ коррекции траектории движения по любому из пп. 1-5, дополнительно содержащий этапы, на которых:
задают целевую область коррекции для коррекции траектории движения рассматриваемого транспортного средства на основе по меньшей мере одного из информации карты и данных, обнаруженных датчиком; и
корректируют траекторию движения рассматриваемого транспортного средства, предполагая, что смещение является постоянным значением в целевой области коррекции.
7. Способ коррекции траектории движения по любому из пп. 1-6, дополнительно содержащий этапы, на которых:
задают целевую область коррекции для коррекции траектории движения рассматриваемого транспортного средства на основе по меньшей мере одного из информации карты и данных, обнаруженных датчиком; и
задают начальную точку или конечную точку области для целевой области коррекции, которая перекрывает маршрут движения рассматриваемого транспортного средства, в качестве фиксированной точки,
при этом скорректированная траектория движения рассматриваемого транспортного средства пересекает фиксированную точку.
8. Способ коррекции траектории движения по любому из пп. 1-7, в котором траектория движения рассматриваемого транспортного средства корректируется в направлении ширины рассматриваемого транспортного средства.
9. Способ коррекции траектории движения по п. 8, в котором верхнее предельное значение задается для величины коррекции в направлении ширины.
10. Способ коррекции траектории движения по любому из пп. 1-9, дополнительно содержащий этапы, на которых:
идентифицируют полосу движения другого транспортного средства на основе информации карты;
определяют, отклонено ли положение другого транспортного средства в сторону рассматриваемого транспортного средства на полосе движения другого транспортного средства, на основе смещения; и
когда определено, что положение другого транспортного средства отклоняется в сторону рассматриваемого транспортного средства на полосе движения другого транспортного средства, корректируют область с возможностью движения так, чтобы область с возможностью движения на маршруте движения рассматриваемого транспортного средства уменьшалась в соответствии с величиной смещения.
11. Способ коррекции траектории движения по п. 10, дополнительно содержащий этап, на котором:
вычисляют центральную линию скорректированной области с возможностью движения в качестве траектории движения рассматриваемого транспортного средства.
12. Способ коррекции траектории движения по п. 10, дополнительно содержащий этап, на котором:
вычисляют траекторию движения рассматриваемого транспортного средства в скорректированной области с возможностью движения.
13. Способ коррекции траектории движения по любому из пп. 10-12, дополнительно содержащий этапы, на которых:
корректируют область с возможностью движения таким образом, что область с возможностью движения на маршруте движения рассматриваемого транспортного средства уменьшается в направлении ширины рассматриваемого транспортного средства в соответствии с величиной смещения; и
когда протяженность скорректированной области с возможностью движения в направлении ширины меньше, чем ширина рассматриваемого транспортного средства, расширяют область в области с возможностью движения, которая расположена на противоположной стороне от уменьшенной области в направлении ширины.
14. Способ коррекции траектории движения по любому из пп. 10-13, дополнительно содержащий этапы, на которых:
когда величина смещения становится небольшой после того, как область с возможностью движения на маршруте движения рассматриваемого транспортного средства уменьшается в соответствии с величиной смещения, корректируют область с возможностью движения так, чтобы область с возможностью движения на маршруте движения рассматриваемого транспортного средства расширялась.
15. Способ коррекции траектории движения по любому из пп. 10-13, в котором размер скорректированной области с возможностью движения сохраняется в течение предварительно определенного времени.
16. Способ управления движением, содержащий этап, на котором управляют движением рассматриваемого транспортного средства на основе траектории движения, скорректированной посредством способа коррекции траектории движения по любому из пп. 10-15.
17. Способ управления движением по п.16, в котором скорость транспортного средства рассматриваемого транспортного средства уменьшается, когда протяженность скорректированной области с возможностью движения в направлении ширины меньше, чем ширина рассматриваемого транспортного средства.
18. Устройство управления транспортного средства, причем устройство управления имеет функцию для реализации коррекции траектории движения рассматриваемого транспортного средства, когда обнаружение полосы движения посредством датчика, предусмотренного для рассматриваемого транспортного средства, невозможно или затруднено,
при этом устройство управления выполнено с возможностью:
получать информацию карты, включающую в себя информацию о воображаемой полосе движения, из базы данных;
вычислять траекторию движения рассматриваемого транспортного средства, которая должна быть целевой траекторией, когда рассматриваемое транспортное средство движется по маршруту движения рассматриваемого транспортного средства на основе информации карты;
обнаруживать положение другого транспортного средства, движущегося по воображаемой полосе, расположенной в направлении ширины рассматриваемого транспортного средства, с помощью датчика;
вычислять смещение положения другого транспортного средства на полосе движения другого транспортного средства, которая является воображаемой полосой движения, по которой движется другое транспортное средство, на основе положения другого транспортного средства; и
корректировать траекторию движения рассматриваемого транспортного средства в соответствии с упомянутым смещением.
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| DE 102016222782 A1, 24.05.2018. | |||

