ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к способу помощи при движении и устройству помощи при движении для помощи при движении транспортного средства.
УРОВЕНЬ ТЕХНИКИ
[0002] Известно устройство помощи при вождении, которое снабжено средством для получения множества информации о маршруте движения с разными диапазонами распознавания и средством для генерации курса для транспортного средства с использованием множества информации о маршруте движения в соответствии со средой вождения (например, Патентный документ 1). Множество информации о маршруте движения включает в себя, например, обширную карту местности, используемую для определения приблизительного маршрута движения от начальной точки транспортного средства до пункта назначения, среднюю карту местности, используемую для распознавания пешеходов и других транспортных средств и для предсказания их перемещений, и локальную карту местности, используемую для обнаружения и избежания перемещений пешеходов и других транспортных средств, которые не могут быть распознаны на средней карте местности.
Документ предшествующего уровня техники
Патентный документ
[0003] Патентный документ 1 Публикация международной патентной заявки WO 2012/014280
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачи, решаемые изобретением
[0004] В предшествующем уровне техники, поскольку невозможно объединить пути рассматриваемого транспортного средства, сгенерированные из карт с разными диапазонами распознавания, существует проблема, заключающаяся в том, что это трудно составить план движения, совместимый как с реагированием на окружающую среду, так и с плавным движением.
[0005] Задача, которая должна быть решена настоящим изобретением, состоит в том, чтобы обеспечить способ помощи при движении и устройство помощи при движении, которые могут составлять план движения, совместимый как с реагированием на окружающую среду, так и с плавным движением.
Средства для решения задач
[0006] Настоящее изобретение решает описанные выше проблемы посредством получения информации о границах статического пути движения между путем движения рассматриваемого транспортного средства и другим, чем упомянутый путь движения, получения информации о границах динамического пути движения, отличных от границ статического пути движения, генерации статического пути движения, по которому рассматриваемое транспортное средство может двигаться на основе информации о границах статического пути движения, генерации динамического пути движения, который короче статического пути движения и соответствует окружающей среде, на основе информации о статическом пути движения и границах динамического пути движения, и управления рассматриваемым транспортным средством для движения по целевому пути движения, включающему в себя статический путь движения и динамический путь движения.
Эффект изобретения
[0007] В соответствии с этим изобретением возможно создать план движения, который совместим как с реагированием на окружающую среду, так и с плавным движением.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008]
Фиг. 1 является блок-схемой, иллюстрирующей устройство помощи при движении согласно варианту осуществления настоящего изобретения.
Фиг. 2 является блок-схемой, иллюстрирующей каждую функцию устройства управления, показанного на фиг. 1.
Фиг. 3 является схемой, поясняющей статический путь движения.
Фиг. 4 является схемой, поясняющей различные виды информации, используемой для генерации динамического пути движения.
Фиг. 5 является схемой, поясняющей, как комбинируются статический путь движения и динамический путь движения.
Фиг. 6 является схемой, поясняющей примерный способ вычисления значения управляющей команды.
Фиг. 7 является схемой, поясняющей вычислительный цикл и вычислительную нагрузку процессора в каждом процессе устройства управления.
Фиг. 8А является схемой, поясняющей процесс коррекции статического пути движения.
Фиг. 8B является схемой каждого статического пути движения в каждом блоке, показанном на фиг. 8A.
Фиг. 9 является блок-схемой, иллюстрирующей последовательность операций процесса управления настоящего варианта осуществления.
ВАРИАНТ(Ы) ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0009] В дальнейшем устройство помощи при движении для транспортного средства и его способ согласно варианту осуществления настоящего изобретения будут описаны со ссылкой на чертежи. В данном случае, в настоящем варианте осуществления настоящее изобретение будет описано на примере устройства помощи при движении, установленного на транспортном средстве.
[0010] Фиг. 1 является схемой, иллюстрирующей конфигурацию устройства 100 помощи при движении транспортного средства согласно варианту осуществления настоящего изобретения. Как показано на фиг. 1, устройство 100 помощи при движении согласно настоящему варианту осуществления содержит устройство 110 определения местоположения рассматриваемого транспортного средства, картографическую базу 120 данных, датчик 130 скорости транспортного средства, датчик 140 измерения расстояния, камеру 150, приводной механизм 170, устройство 180 управления и датчик 190 скорости рыскания. Эти компоненты подключены друг к другу через сеть контроллеров (CAN) или другую локальную сеть в транспортном средстве для взаимного обмена информацией.
[0011] Устройство 110 определения местоположения рассматриваемого транспортного средства содержит блок GPS. Устройство 110 определения местоположения рассматриваемого транспортного средства детектирует радиоволны, передаваемые через передачи множества спутников посредством локатора (антенны GPS), и периодически получает информацию о местоположении рассматриваемого транспортного средства. Устройство 110 определения местоположения рассматриваемого транспортного средства определяет текущее местоположение рассматриваемого транспортного средства на основе полученной информации о местоположении рассматриваемого транспортного средства, информации об изменении угла, полученной от гироскопического датчика (не показан), и скорости транспортного средства, полученной от датчика 130 скорости транспортного средства. Устройство 110 определения местоположения рассматриваемого транспортного средства также может определять местоположение рассматриваемого транспортного средства на карте с использованием хорошо известной техники сопоставления с картой. Информация о местоположении рассматриваемого транспортного средства, обнаруженная устройством 110 определения местоположения рассматриваемого транспортного средства, выводится в устройство 180 управления.
[0012] Картографическая база 120 данных содержит картографическую информацию. Картографическая информация, хранящаяся в картографической базе 120 данных, включает в себя информацию об атрибутах дорог в каждой координате карты. Атрибуты дорог включают в себя, например, кривые, уклоны, перекрестки, развязки, узкие дороги, прямые дороги, точки слияния и т.п. Атрибуты этих дорог являются просто примерами и не предназначены для ограничения атрибутов дорог. Атрибуты дорог включают в себя информацию о формах дорог и уклонах дорог. Картографическая информация также включает в себя информацию о центральной линии полосы движения и кривизне полосы движения. Центральная линия полосы движения является центральной линией полосы движения вдоль направления движения транспортного средства и задается для каждой полосы движения. Кривизна полосы движения является кривизной по центральной линии полосы движения и задается для каждой полосы движения.
[0013] Картографическая информация также включает в себя информацию о границах пути движения. Границы пути движения являются границами между путем движения рассматриваемого транспортного средства и другим, чем упомянутый путь движения рассматриваемого транспортного средства. Путь движения рассматриваемого транспортного средства является дорогой, по которой движется рассматриваемое транспортное средство. Другими словами, границы пути движения являются границами, которые образуют дорогу, по которой движется рассматриваемое транспортное средство. Границы пути движения расположены как с левой, так и с правой сторон от направления движения рассматриваемого транспортного средства. Границы пути движения могут быть заданы для каждой полосы движения или для каждой дороги. Картографическая информация, включающая в себя информацию о границах пути движения, представляет собой, например, высокоточную картографическую информацию, подходящую для автоматизированного или автономного вождения. Высокоточная картографическая информация может быть получена, например, посредством связи с сервером или системой, обеспеченной вне рассматриваемого транспортного средства, или может быть заранее сохранена в картографической базе 120 данных.
[0014] В нижеследующем описании границы пути движения, заранее включенные в картографическую информацию, называются границами статического пути движения. Границы статического пути движения включают в себя формы дороги и ширины дороги, сохраненные в качестве картографической информации. Границы статического пути движения являются информацией, которая не будет обновляться, пока не обновлена картографическая информация. Для точек, где границы пути движения не могут быть четко идентифицированы (например, на перекрестке), границы пути движения устанавливаются в картографической информации заранее. Предварительно определенные границы пути движения представляют собой воображаемые границы пути движения, а не фактическую разметку поверхности дороги или дорожные конструкции. Помимо форм дороги и ширины дороги, границы статического пути движения могут также содержать информацию о местоположениях на карте.
[0015] Картографическая информация также включает в себя информацию о правилах дорожного движения, которые необходимо соблюдать во время движения транспортного средства. Информация о правилах дорожного движения включает в себя, например, паузы на маршруте, запреты на стоянку/остановку, низкую скорость, ограничение скорости (допустимую скорость) и запреты смены полосы движения, но не ограничена этим. Информация о правилах дорожного движения задается для каждой полосы движения. В данном случае, эта информация, включенная в картографическую информацию, задается узлами и соединениями (также называемыми дорожными соединениями), которые соединяют узлы.
[0016] Датчик 130 скорости транспортного средства измеряет скорость вращения системы привода, такой как ведущий вал, и определяет скорость движения рассматриваемого транспортного средства (далее также называемую скоростью транспортного средства) на основе измеренной скорости вращения. Скорость транспортного средства для рассматриваемого транспортного средства, определенная датчиком 130 скорости транспортного средства, выводится на устройство 180 управления. Датчик 190 скорости рыскания, например, установлен в кабине транспортного средства и определяет скорость рыскания рассматриваемого транспортного средства (изменение скорости угла поворота в направлении поворота). Информация о скорости рыскания рассматриваемого транспортного средства, определенная датчиком 190 скорости рыскания, выводится в устройство 180 управления. Соединения идентифицируются на уровне полосы движения.
[0017] Датчик 140 измерения расстояния обнаруживает объекты, существующие вокруг рассматриваемого транспортного средства. Кроме того, датчик 140 измерения расстояния вычисляет относительное расстояние между рассматриваемым транспортным средством и объектами, направление, в котором объекты расположены относительно рассматриваемого транспортного средства, и относительную скорость объектов относительно рассматриваемого транспортного средства. Объекты включают в себя, например, границы полос движения, центральные линии, срединные полосы, ограждения, бордюры, туннели или боковые стены автомагистралей. Другие объекты включают в себя, например, автомобили, отличные от рассматриваемого транспортного средства (другие транспортные средства), мотоциклы, велосипеды, дорожные знаки, светофоры, пешеходные переходы и т.д. То есть датчик 140 измерения расстояния представляет собой тип датчика, который обнаруживает окружающую среду рассматриваемого транспортного средства. Информация об объектах, обнаруженных датчиком 140 измерения расстояния, выводится на устройство 180 управления. Лазерный радар, радар миллиметрового диапазона и т.д. (LFR и т.д.) можно использовать в качестве датчика 140 измерения расстояния. Датчик 140 измерения расстояния имеет ограниченный диапазон, в котором объекты могут быть обнаружены, и обнаруживает объекты, существующие в пределах предварительно определенного диапазона. Предварительно определенный диапазон обнаружения отличается в зависимости от типа датчика и задается для каждого типа датчика. Количество датчиков 140 измерения расстояния в частности не ограничивается, и датчик 140 измерения расстояния обеспечен, например, спереди, сбоку и сзади рассматриваемого транспортного средства. Таким образом, датчик 140 измерения расстояния обнаруживает объекты, существующие во всей области вокруг рассматриваемого транспортного средства.
[0018] Камера 150 отображает дороги и/или объекты, существующие вокруг рассматриваемого транспортного средства. Объекты, отображаемые камерой 150, те же, что и объекты, обнаруженные датчиком 140 измерения расстояния. В настоящем варианте осуществления камера 150 отображает область перед рассматриваемым транспортным средством. Информация изображения, захваченная камерой 150, выводится в устройство 180 управления. Камера 150 представляет собой камеру для формирования изображения перед рассматриваемым транспортным средством и/или камеру для формирования изображения сбоку от рассматриваемого транспортного средства. В данном случае, камера 150, аналогично датчику 140 измерения расстояния, имеет ограниченный диапазон, в котором могут быть сформированы изображения объектов, и формирует изображения объектов, существующих в предварительно определенном диапазоне. Как правило, диапазон формирования изображения камеры 150 уже, чем диапазон обнаружения датчика 140 измерения расстояния, но в настоящем варианте осуществления соотношение между диапазоном формирования изображения камеры 150 и диапазоном обнаружения датчика 140 измерения расстояния в частности не ограничено.
[0019] Устройство 160 ввода является рабочим компонентом, которым может управлять водитель. В настоящем варианте осуществления водитель устанавливает включение/выключение управление автономным вождением посредством управления устройством 160 ввода. Водитель также может управлять устройством 160 ввода, чтобы устанавливать пункт назначения рассматриваемого транспортного средства.
[0020] Приводной механизм 170 включает в себя двигатели и/или электродвигатели (силовые системы), тормоза (тормозные системы) и исполнительные механизмы рулевого управления (системы рулевого управления) и т.д. для автономного вождения рассматриваемого транспортного средства. В настоящем варианте осуществления, когда выполняется управление автономным вождением, которое будет описано ниже, работой приводного механизма 170 управляет устройство 180 управления.
[0021] Устройство 180 управления представляет собой компьютер с процессором и содержит ПЗУ (постоянное запоминающее устройство), в котором хранится программа для управления движением рассматриваемого транспортного средства, ЦП (центральный процессор), который выполняет программу, хранящуюся в ПЗУ, и RAM (оперативное запоминающее устройство), которое функционирует как запоминающее устройство с произвольным доступом. В данном случае, в качестве рабочей схемы микропроцессор (MPU), процессор цифровых сигналов (DSP), специализированная интегральная схема (ASIC), программируемая вентильная матрица (FPGA) и т.п. могут использоваться в качестве замены или в дополнение к ЦП.
[0022] В настоящем варианте осуществления программа, которая должна выполняться устройством 180 управления, описывается как пример конфигурации, заранее сохраненной в ПЗУ, но место, где хранится программа, не ограничивается ПЗУ. Например, программа может храниться на считываемом компьютером и портативном считываемом компьютером носителе записи (например, дисковых носителях, флэш-памяти и т.д.). В этом случае устройство 180 управления выполняет программу, загруженную со считываемого компьютером носителя записи. Другими словами, устройство 180 управления может включать в себя только рабочую схему и загружать программу извне.
[0023] Фиг. 2 является блок-схемой, иллюстрирующей функции устройства 180 управления. Каждая функция, реализуемая устройством 180 управления, будет описана со ссылкой на фиг. 2. Как показано на фиг. 2, устройство 180 управления включает в себя блок 181 генерации границ полосы движения рассматриваемого транспортного средства, блок 182 генерации статического пути движения, блок 183 генерации проходимой области, блок 184 генерации динамического пути движения, блок 185 комбинирования путей и блок 186 следования по пути. Эти блоки реализуют функции, описанные ниже, с помощью программного обеспечения, установленного в ПЗУ. В настоящем варианте осуществления функции устройства 180 управления разделены на шесть функциональных блоков, и описаны функции каждого функционального блока. Однако функции устройства 180 управления не обязательно должны быть разделены на шесть блоков и могут быть разделены на пять или меньше функциональных блоков или семь или более функциональных блоков. Функции устройства 180 управления не ограничиваются функциями функциональных блоков, описанных ниже, но также включают в себя, например, функцию управления навигационной системы. Кроме того, каждый блок, показанный на фиг. 2, имеет разный вычислительный цикл (также называемый временем обработки вычислений) процессора в каждом процессе, но вычислительный цикл процессора будет описан после описания функций.
[0024] Функция блока 181 генерации границы полосы движения рассматриваемого транспортного средства будет описана ниже. Блок 181 генерации границ полосы движения рассматриваемого транспортного средства генерирует границы полосы движения рассматриваемого транспортного средства (также называемые собственной полосой движения) между полосой движения, по которой движется рассматриваемое транспортное средство, и другим, чем упомянутая полоса движения. Блок 181 генерации границ полосы движения рассматриваемого транспортного средства генерирует границы полосы движения рассматриваемого транспортного средства, расположенные с левой и правой сторон по отношению к направлению движения рассматриваемого транспортного средства, соответственно.
[0025] Информация о местоположении рассматриваемого транспортного средства от устройства 110 определения местоположения рассматриваемого транспортного средства, информация о границах статического пути движения, включенная в картографическую информацию из картографической базы данных 120, и информация плана действий, указывающая план маршрута рассматриваемого транспортного средства из навигационной системы (не показана) вводятся в блок 181 генерации границ полосы движения рассматриваемого транспортного средства, соответственно. Другими словами, блок 181 генерации границ полосы движения рассматриваемого транспортного средства получает текущую информацию о местоположении рассматриваемого транспортного средства от устройства 110 определения местоположения рассматриваемого транспортного средства, получает информацию о границах статического пути движения из картографической базы 120 данных и получает информацию плана действий от навигационной системы. Информация плана действий включает в себя по меньшей мере информацию о местонахождении пункта назначения рассматриваемого транспортного средства, информацию о местоположении точек проезда, которые запланировано проехать транспортному средству до достижения места назначения, и информацию о дорогах, по которым запланировано движение рассматриваемого транспортного средства. Другими словами, информация плана действий является приблизительной информацией о маршруте до места назначения рассматриваемого транспортного средства.
[0026] Блок 181 генерации границ полосы движения рассматриваемого транспортного средства генерирует границы полосы движения рассматриваемого транспортного средства на основе различной входной информации. Например, блок 181 генерации границ полосы движения рассматриваемого транспортного средства идентифицирует полосу движения, по которой движется рассматриваемое транспортное средство, исходя из информации плана действий и текущего местоположения рассматриваемого транспортного средства. Блок 181 генерации границ полосы движения рассматриваемого транспортного средства получает информацию о границах статического пути движения, относящихся к идентифицированной полосе движения, из картографической информации и генерирует границы полосы движения рассматриваемого транспортного средства на основе информации о границах статического пути движения. Информация о границах статического пути движения может включать в себя не только информацию о полосе движения, по которой движется рассматриваемое транспортное средство, но также информацию о полосе движения, которая отличается от упомянутой полосы движения и по которой планируется движение транспортного средства. Например, когда планируется, что рассматриваемое транспортное средство покинет основную линию, по которой в настоящее время движется, в точке ответвления и будет двигаться по линии ответвления, информация о границах статического пути движения включает в себя информацию о линии ответвления, которая является полосой движения перед точкой ответвления в дополнение к информации о полосе движения, по которой в данный момент движется рассматриваемое транспортное средство. Кроме того, например, когда планируется, что рассматриваемое транспортное средство поворачивает направо или налево на перекрестке и т.п., информация о границах статического пути движения включает в себя информацию о полосе движения, по которой планируется движение рассматриваемого транспортного средства после поворота направо или налево, в дополнение к информации о полосе движения, по которой в данный момент движется рассматриваемое транспортное средство. Границы полосы движения рассматриваемого транспортного средства основаны на информации о границах статического пути движения. Границы полосы движения рассматриваемого транспортного средства отражают формы дороги и ширину дороги, хранящиеся в картографической информации. То есть границы полосы движения рассматриваемого транспортного средства, генерируемые блоком 181 генерации границ полосы движения рассматриваемого транспортного средства, являются границами между полосой движения в картографической информации и другим, чем упомянутая полоса движения в картографической информации. Информация о границах полосы движения рассматриваемого транспортного средства, генерируемая блоком 181 генерации границ полосы движения рассматриваемого транспортного средства, выводится в блок 182 генерации статического пути движения и блок 183 генерации проходимой области. Информация о местоположении рассматриваемого транспортного средства, показанная на фиг. 2, указывает информацию, введенную из устройства 110 определения местоположения рассматриваемого транспортного средства, информация о границах статического пути движения указывает информацию, введенную из картографической базы 120 данных 120, а информация плана действий указывает информацию, введенную из навигационной системы.
[0027] Далее будет описана функция блока 182 генерации статического пути движения. Блок 182 генерации статического пути движения генерирует путь движения рассматриваемого транспортного средства на основе картографической информации в качестве статического пути движения. Статический путь движения является идеальным путем движения для рассматриваемого транспортного средства, который отражает формы дороги и ширину дороги, хранящиеся в картографической информации.
[0028] Как показано на фиг. 2, информация о границах полосы движения рассматриваемого транспортного средства вводится в блок 182 генерации статического пути движения из блока 181 генерации границ полосы движения рассматриваемого транспортного средства. Например, блок 182 генерации статического пути движения генерирует путь движения, на котором изменение поперечного ускорения, применяемого к рассматриваемому транспортному средству, когда рассматриваемое транспортное средство движется по пути движения на карте, минимизируется на основе информации о границах полосы движения рассматриваемого транспортного средства и/или информации о полосе движения, в качестве статического пути движения. Когда рассматриваемое транспортное средство движется по статическому пути движения, изменение поперечного ускорения, применяемого к рассматриваемому транспортному средству, минимизируется. Другими словами, статический путь движения является путем движения, по которому рассматриваемое транспортное средство может двигаться стабильно. Информация о статическом пути движения, генерируемая блоком 182 генерации статического пути движения, выводится в блок 184 генерации динамического пути движения и блок 185 комбинирования путей.
[0029] В качестве примера статического пути движения, путь движения, который минимизирует изменение поперечного ускорения рассматриваемого транспортного средства, когда рассматриваемое транспортное средство движется по пути движения на карте, используется в качестве примера, но статический путь движения этим не ограничивается. Статический путь движения может быть путем движения, по которому рассматриваемое транспортное средство может двигаться стабильно. Блок 182 генерации статического пути движения может генерировать статический путь движения с использованием других показателей для стабильного движения. Статический путь движения может быть путем движения с минимальным изменением кривизны. Кроме того, изменение поперечного ускорения или изменение кривизны не ограничиваются минимальным значением. Например, статический путь движения может быть путем движения, в котором изменение поперечного ускорения равно или меньше предварительно определенного порогового значения, или изменение кривизны равно или меньше порогового значения. Статический путь движения не требуется генерировать с использованием других показателей, перечисленных в приведенных выше примерах. Например, блок 182 генерации статического пути движения может генерировать путь движения вдоль центральной линии полосы движения на карте в качестве статического пути движения на основе информации о полосе движения на карте. В этом случае, например, статический путь движения генерируется в качестве пути движения, в котором не учитывается изменение поперечного ускорения рассматриваемого транспортного средства.
[0030] Кроме того, блок 182 генерации статического пути движения может выбирать информацию о границах статического пути движения в соответствии с обстановкой вождения рассматриваемого транспортного средства и генерировать статический путь движения на основе выбранной информации о границах статического пути движения. Например, в обстановке, в которой рассматриваемое транспортное средство движется по прямому пути, блок 182 генерации статического пути движения может выбирать информацию о границах статического пути движения, включая информацию о полосе движения, по которой в настоящее время движется рассматриваемое транспортное средство, и генерировать статический путь движения по прямому пути на основе выбранной информации о границах статического пути движения. Кроме того, например, в обстановке, в которой рассматриваемое транспортное средство покидает основную линию, по которой в настоящее время движется, в точке ответвления и движется по линии ответвления, блок 182 генерации статического пути движения может выбирать информацию о границах статического пути движения, чтобы включала в себя информацию об ответвлении перед точкой ответвления, в дополнение к полосе движения, по которой в настоящее время движется рассматриваемое транспортное средство, и может генерировать статический путь движения от места до прохождения точки ответвления до места после прохождения точки ответвления на основе выбранной информации о границах статического пути движения. В обстановке, в которой рассматриваемое транспортное средство поворачивает направо или налево на перекрестке и т.п., блок 182 генерации статического пути движения может выбирать информацию о границах статического пути движения, чтобы включала в себя информацию о полосе движения, по которой планируется движение транспортного средства после правого или левого поворота, в дополнение к информации о полосе движения, по которой в настоящее время движется рассматриваемое транспортное средство, и может генерировать статический путь движения от места до поворота направо или налево на перекрестке до места после поворота направо или налево на перекрестке на основе выбранной информации о границах статического пути движения.
[0031] Фиг. 3 является схемой, поясняющей статический путь движения. На фиг. 3 символ «1» обозначает границу статического пути движения с левой стороны относительно направления движения рассматриваемого транспортного средства, символ «2» обозначает границу статического пути движения с правой стороны относительно направления движения рассматриваемого транспортного средства, а символ «3» обозначает статический путь движения, генерируемый блоком 182 генерации статического пути движения.
[0032] Способ генерации статического пути движения будет описан со ссылкой на фиг. 3. Во-первых, блок 182 генерации статического пути движения идентифицирует границу 1 статического пути движения с левой стороны и границу 2 статического пути движения с правой стороны из информации о границах полосы движения рассматриваемого транспортного средства, введенной из блока 181 генерации границ полосы движения рассматриваемого транспортного средства. Граница 1 статического пути движения и граница 2 статического пути движения являются границами пути движения, отражающими формы дороги и ширину дороги, хранящиеся в картографической информации. То есть граница 1 статического пути движения и граница 2 статического пути движения являются границами пути движения, заданными в качестве картографической информации.
[0033] Затем блок 182 генерации статического пути движения устанавливает длину пути для статического пути движения. Например, блок 182 генерации статического пути движения устанавливает длину пути для статического пути движения, чтобы включал в себя по меньшей мере два поворота на дороге, по которой движется рассматриваемое транспортное средство. Кроме того, например, блок 182 генерации статического пути движения устанавливает длину пути для статического пути движения, чтобы включал в себя участок прямого пути на предварительно определенном расстоянии или более после поворота. Прямая линия является участком прямого пути, где кривизна равна или меньше предварительно определенного порогового значения, а расстояние равно или больше предварительно определенного расстояния. В примере на фиг. 3 блок 182 генерации статического пути движения устанавливает длину пути для статического пути 3 движения около 240 метров.
[0034] Блок 182 генерации статического пути движения генерирует статический путь движения, используя, например, функцию оценки, которая является квадратичной выпуклой функцией, и метод Ньютона. Блок 182 генерации статического пути движения устанавливает функцию оценки, удовлетворяющую следующим уравнениям (1) и (2), в качестве статического пути движения.
[0035]
[Уравнение 1]

[Уравнение 2]
Однако в приведенных выше уравнениях (1) и (2) символ «J» обозначает функцию оценки (статический путь движения), символ «u(i)» обозначает расстояние движения рассматриваемого транспортного средства от центральной линии пути движения в каждой точке. Символ «as» обозначает весовой коэффициент (например, as = 1), указывающий величину влияния границ статического пути движения на статический путь движения, символ «ysl» обозначает расстояние между границей статического пути движения с левой стороны и центральной линией пути движения, а символ «ysr» обозначает расстояние между границей статического пути движения с правой стороны и центральной линией пути движения. Символ «kρ» обозначает весовой коэффициент, указывающий величину влияния фактора уменьшения кривизны на первый динамический путь движения, как описано ниже. Возможно установить допустимую кривизну в соответствии со скоростью транспортного средства посредством установки переменного значения в соответствии со скоростью транспортного средства. Символ «ρ» обозначает кривизну.
[0036] Блок 182 генерации статического пути движения вычисляет u(i), удовлетворяющее вышеприведенному уравнению (2), и устанавливает функцию J оценки, когда вычисленное u(i) подставляется в вышеприведенное уравнение (1), в качестве статического пути движения.
[0037] В данном случае, центральная линия пути движения в вышеприведенном уравнении (1) является центральной линией, которая проходит вдоль центра левой и правой границ статического пути движения. Примером способа генерации центральной линии пути движения является вычисление потенциальных полей (позиционная энергия) для левой и правой границ статического пути движения, вычисление начальной точки, в которой потенциальная энергия становится равной 0 В на центральной линии пути движения, с помощью метода Ньютона и поиск контурных линий с потенциальной энергией 0 В с помощью RK4 (метода Рунге-Кутта). Вышеприведенный способ генерации центральной линии пути движения является лишь примером, и можно использовать другие способы.
[0038] Возвращаясь снова к фиг. 2, будут описаны функции, реализуемые устройством 180 управления. Будет описана функция блока 183 генерации проходимой области. Блок 183 генерации проходимой области генерирует область, в которой может двигаться рассматриваемое транспортное средство по отношению к окружающей среде рассматриваемого транспортного средства, в качестве проходимой области.
[0039] Информация об относительном расстоянии между рассматриваемым транспортным средством и объектами, направлении, в котором объекты расположены по отношению к рассматриваемому транспортному средству, и относительной скорости объектов относительно рассматриваемого транспортного средства вводится с датчика 140 измерения расстояния в блок 183 генерации проходимой области. Кроме того, информация о захваченном изображении объектов, существующих вокруг рассматриваемого транспортного средства, вводится из камеры 150 в блок 183 генерации проходимой области. Блок 183 генерации проходимой области идентифицирует границы динамического пути движения, которые указывают границы между путем движения рассматриваемого транспортного средства и другим, чем путь движения рассматриваемого транспортного средства, на основе входной информации. В нижеследующем пояснении различная информация, вводимая из датчика 140 измерения расстояния и камеры 150, будет называться информацией о границах динамического пути движения. Другими словами, блок 183 генерации проходимой области получает информацию о границах динамического пути движения от датчика 140 измерения расстояния и камеры 150, которые обнаруживают окружающую среду рассматриваемого транспортного средства. Информация о границах динамического пути движения может быть только информацией, вводимой из датчика 140 измерения расстояния.
[0040] Границы динамического пути движения содержат информацию об объектах, обнаруженных датчиком 140 измерения расстояния, и/или объектах, отображаемых камерой 150. Границы динамического пути движения являются границами пути движения в соответствии с окружающей средой рассматриваемого транспортного средства. Границы динамического пути движения включают в себя, например, разметку поверхности дороги, дорожные конструкции и препятствия. Границы динамического пути движения разметки поверхности дороги включают в себя, например, границы полос движения, центральные линии. Границы динамического пути движения дорожных конструкций включают в себя, например, срединные полосы, ограждения, бордюры, туннели или боковые стены автомагистралей. Границы динамического пути движения препятствий включают, например, другие транспортные средства, мотоциклы и велосипеды.
[0041] Блок 183 генерации проходимой области может различать границы динамического пути движения на первые границы динамического пути движения и вторые границы динамического пути движения в соответствии с типом границ динамического пути движения. Первыми границами динамического пути движения являются границы динамического пути движения разметки поверхности дороги. Первые границы динамического пути движения включают в себя, например, границы полос движения, центральные линии и т.п. Вторые границы динамического пути движения являются границами динамического пути движения дорожных конструкций и/или объектов (препятствий), существующих вокруг рассматриваемого транспортного средства. Вторые границы динамического пути движения включают в себя, например, срединные полосы, ограждения, бордюры, другие транспортные средства, мотоциклы, велосипеды и т.п.
[0042] Блок 183 генерации проходимой области генерирует проходимую область рассматриваемого транспортного средства на основе информации о границах динамического пути движения. Например, когда полоса движения, по которой движется рассматриваемое транспортное средство, задана левой и правой границами полосы движения (белые линии), блок 183 генерации проходимой области идентифицирует белую линию с левой стороны и белую линию с правой стороны в качестве границ динамического пути движения. Затем блок 183 генерации проходимой области генерирует область, расположенную между белой линией с левой стороны и белой линией с правой стороны, в качестве проходимой области рассматриваемого транспортного средства. В приведенном выше примере, когда впереди с левой стороны по отношению к направлению движения рассматриваемого транспортного средства находится припаркованное транспортное средство, блок 183 генерации проходимой области идентифицирует боковую часть припаркованного транспортного средства, а белую линию с правой стороны обнаруживает датчик 140 измерения расстояния в качестве границ динамического пути движения. Затем блок 183 генерации проходимой области генерирует область, исключая область, занимаемую припаркованным транспортным средством, в которой рассматриваемое транспортное средство может объехать припаркованное транспортное средство, в качестве проходимой области. Таким образом, границы динамического пути движения отличаются от границ статического пути движения тем, что границы динамического пути движения изменяются в соответствии с окружающей средой рассматриваемого транспортного средства. Кроме того, поскольку границы динамического пути движения основаны на информации, обнаруженной датчиком 140 измерения расстояния, который имеет ограниченный диапазон обнаружения, и/или информации, отображаемой камерой 150, которая имеет ограниченный диапазон формирования изображения, информация о границах динамического пути движения ограничена информацией о границах пути движения, существующих в пределах диапазона обнаружения датчика 140 измерения расстояния, и/или информацией о границах пути движения, существующих в пределах диапазона формирования изображения камеры 150. В отличие от этого, поскольку границы статического пути движения основаны на картографической информации, информация о границах статического пути движения включает в себя информацию о границах пути движения, существующих за пределами диапазона обнаружения датчика 140 измерения расстояния и/или за пределами диапазона формирования изображения камеры 150. Информация о проходимой области, генерируемая блоком 183 генерации проходимой области, выводится в блок 184 генерации динамического пути движения.
[0043] Далее будет описана функция блока 184 генерации динамического пути движения. Блок 184 генерации динамического пути движения генерирует путь движения, соответствующий окружающей среде рассматриваемого транспортного средства, в качестве динамического пути движения. Динамический путь движения является путем движения, который отличается от статического пути движения и отражает текущую окружающую среду рассматриваемого транспортного средства. Другими словами, динамический путь движения является путем движения для минимизации рисков, которые могут возникнуть в зависимости от окружающей среды рассматриваемого транспортного средства. Такие риски включают, например, риски того, что рассматриваемое транспортное средство выезжает за границы полосы движения, риски того, что рассматриваемое транспортное средство приближается к препятствиям, существующим на дороге, и т.п. Как показано на фиг. 2, информация о статическом пути движения от блока 182 генерации статического пути движения и информация о проходимой области от блока 183 генерации проходимой области вводятся в блок 184 генерации динамического пути движения, соответственно. Блок 184 генерации динамического пути движения генерирует динамический путь движения с использованием различной входной информации и выводит информацию о динамическом пути движения в блок 185 комбинирования путей.
[0044] Фиг. 4 является схемой, поясняющей различные виды информации, используемой для генерации динамического пути движения. Различная информация, показанная на фиг. 4, является информацией, вводимой в блок 184 генерации динамического пути движения, когда рассматриваемое транспортное средство движется в местоположении P на фиг. 3. Ось x и ось y, показанные на фиг. 4, соответствуют оси x и оси y, показанным на фиг. 3. На фиг. 4 символ «3а» соответствует статическому пути 3 движения, показанному на фиг. 3. Статический путь 3a движения является путем движения, в котором статический путь 3 движения скорректирован блоком 184 генерации динамического пути движения. На фиг. 4 символы «4» и «5» обозначают белые линии (первые границы динамического пути движения), задающие полосу движения, по которой движется рассматриваемое транспортное средство, символы «6» и «7» обозначают дорожные конструкции (вторые границы динамического пути движения), такие как обочины дороги или ограждения, а символ «8» обозначает припаркованное транспортное средство (вторая граница динамического пути движения). В данном случае, на фиг. 4 границы 4-8 динамического пути движения отображаются как точечные данные, обнаруженные датчиком 140 измерения расстояния, но форма отображения границ динамического пути движения не ограничивается точечными данными. Кроме того, на фиг. 4 сами границы динамического пути движения показаны вместо проходимой области, но блок 184 генерации динамического пути движения может генерировать динамический путь движения, используя информацию о проходимой области. Коррекция статического пути движения будет описана позже.
[0045] Будут описаны способы генерации динамического пути движения с использованием различных видов информации, показанных в примерах на фиг. 4. Во-первых, блок 184 генерации динамического пути движения идентифицирует границы 4-8 динамического пути движения на основе информации, вводимой из датчика 140 измерения расстояния и камеры 150. Границы 4-8 динамического пути движения представляют собой информацию, указывающую окружающую среду рассматриваемого транспортного средства, когда рассматриваемое транспортное средство движется в местоположении P, показанном на фиг. 3.
[0046] Затем блок 184 генерации динамического пути движения устанавливает длину пути для динамического пути движения. В настоящем варианте осуществления блок 184 генерации динамического пути движения устанавливает длину пути для динамического пути движения короче, чем длина пути для статического пути движения, показанного на фиг. 3. Это основано на том, что границы 4-8 динамического пути движения, показанные на фиг. 4, изменяются со временем, потому что окружающая среда рассматриваемого транспортного средства изменяется со временем. Например, блок 184 генерации динамического пути движения устанавливает длину пути для динамического пути движения, чтобы включал в себя весь динамический путь движения в пределах меньшего из диапазона обнаружения датчика 140 измерения расстояния и диапазона формирования изображения камеры 150. В примере, показанном на фиг. 4, блок 184 генерации динамического пути движения устанавливает длину пути для динамического пути движения равной 40 метрам.
[0047] Блок 184 генерации динамического пути движения генерирует динамический путь движения, используя, например, функцию оценки, которая является квадратичной выпуклой функцией, и метод Ньютона. Блок 184 генерации динамического пути движения устанавливает функцию оценки, удовлетворяющую следующим уравнениям (3) и (4), в качестве динамического пути движения.
[0048]
[Уравнение 3]

[Уравнение 4]
Однако в приведенных выше уравнениях (3) и (4) символ «J» обозначает функцию оценки (динамический путь движения) и символ «u(i)» обозначает расстояние движения рассматриваемого транспортного средства от центральной линии пути движения в каждой точке. Символ «as» обозначает весовой коэффициент (например, as = 1), указывающий величину влияния первых границ динамического пути движения на динамический путь движения, символ «ysl» обозначает расстояние между первой границей динамического пути движения с левой стороны и центральной линией пути движения, а символ «ysr» обозначает расстояние между первой границей динамического пути движения с правой стороны и центральной линией пути движения. Символ «ah» обозначает весовой коэффициент (например, ah = 10), указывающий величину влияния вторых границ динамического пути движения на динамический путь движения, символ «yhl» обозначает расстояние между второй границей динамического пути движения с левой стороны и центральной линией пути движения, а символ «yhr» обозначает расстояние между второй границей динамического пути движения с правой стороны и центральной линией пути движения. Символ «alp» обозначает весовой коэффициент (например, alp = 0,1), указывающий величину влияния статического пути движения на динамический путь движения, символ «yhp» обозначает расстояние между центральной линией пути движения и статическим путем движения. Символ «kρ» обозначает весовой коэффициент, указывающий величину влияния фактора уменьшения кривизны на первый динамический путь движения. Возможно установить допустимую кривизну в соответствии со скоростью транспортного средства посредством установки переменного значения в соответствии со скоростью транспортного средства. Символ «ρ» обозначает кривизну.
[0049] В вышеприведенных уравнениях (3) и (4) весовой коэффициент as, весовой коэффициент ah и весовой коэффициент alp предварительно определены устройством 180 управления, чтобы удовлетворяли соотношению «весовой коэффициент ah > весовой коэффициент al > весовой коэффициент alp».
[0050] Блок 184 генерации динамического пути движения вычисляет u(i), удовлетворяющее вышеприведенному уравнению (4), и устанавливает функцию J оценки, когда вычисленное u(i) подставляется в вышеприведенное уравнение (3), в качестве динамического пути движения. Способ генерации центральной линии пути движения описан ранее.
[0051] Возвращаясь снова к фиг. 2, будут описаны функции, реализуемые устройством 180 управления. Будет описана функция блока 185 комбинирования путей. Блок 185 комбинирования путей генерирует целевой путь движения рассматриваемого транспортного средства посредством комбинирования динамического пути движения и статического пути движения. Целевой путь движения рассматриваемого транспортного средства является путем движения, по которому рассматриваемое транспортное средство движется плавно, приспосабливаясь к окружающей среде. Целевой путь движения является путем движения, проходящим по динамическому пути движения от текущего местоположения рассматриваемого транспортного средства и по статическому пути движения после конечной точки динамического пути движения. Другими словами, целевой путь движения является путем движения, который представляет собой комбинацию динамического пути движения и статического пути движения.
[0052] Как показано на фиг. 2, информация о статическом пути движения от блока 182 генерации статического пути движения и информация о динамическом пути движения от блока 184 генерации динамического пути движения вводятся в блок 185 комбинирования путей, соответственно. Блок 185 комбинирования путей комбинирует статический путь движения и динамический путь движения, так что конечная точка динамического пути движения (также называемая окончанием динамического пути движения) размещается на статическом пути движения. Путь (целевой путь движения), скомбинированный блоком 185 комбинирования путей, выводится в блок 186 следования по пути.
[0053] Фиг. 5 является схемой, поясняющей, как комбинируются статический путь движения и динамический путь движения. На фиг. 5 символ «3а» соответствует статическому пути 3 движения, показанному на фиг. 3. Статический путь 3a движения является путем, в котором статический путь 3 движения скорректирован блоком 185 комбинирования путей. На фиг. 5 символ «10» обозначает динамический путь движения, а символ «11» обозначает припаркованное транспортное средство (препятствие), соответственно. Коррекция статического пути движения будет описана позже.
[0054] Как показано на фиг. 5, блок 185 комбинирования путей комбинирует динамический путь 10 движения и статический путь 3a движения, так что конечная точка 10a динамического пути 10 движения располагается на статическом пути 3a движения. Таким образом, генерируется целевой путь движения, который представляет собой комбинацию динамического пути 10 движения для объезда препятствия 11 и статического пути 3а движения для плавного движения транспортного средства по кривым.
[0055] Ссылаясь на фиг. 2 будет описана функция блока 186 следования по пути. Блок 186 следования по пути выполняет автоматическое управление движением, которое автоматически выполняет все или часть движения рассматриваемого транспортного средства, так что рассматриваемое транспортное средство движется по целевому пути движения посредством управления приводным механизмом 170. Блок 186 следования по пути вычисляет значение управляющей команды, чтобы следовать по целевому пути движения, и выводит значение управляющей команды в приводной механизм 170. Значение управляющей команды включает в себя, например, значение команды угла поворота рулевого колеса для управления углом поворота рулевого колеса рассматриваемого транспортного средства. Блок 186 следования по пути также может выполнять процесс следования по пути (например, управление с обратной связью), известный на момент подачи этой заявки.
[0056] Фиг. 6 является схемой, поясняющей примерный способ вычисления значения управляющей команды. На фиг. 6 символ «12» обозначает целевой путь движения, символ «13" обозначает точку наблюдения (xfront, ye) на целевом пути движения, установленную моделью прямого наблюдения, а символ «14» обозначает окружность в контакте с началом O координат и точкой 13 наблюдения. Ось x и ось y, показанные на фиг. 6, соответствуют оси x и оси y, показанным на фиг. 3. В данном случае, моделью прямого наблюдения является предварительно определенной моделью, которая моделирует переднюю точку, на которую смотрит водитель, когда он или она за рулем. В примере на фиг.6 предполагается, что рассматриваемое транспортное средство V расположено в начале O координат.
[0057] Например, блок 186 следования по пути вычисляет кривизну окружности 14 с использованием следующего уравнения (7), чтобы сделать так, чтобы рассматриваемое транспортное средство двигалось по целевому пути движения. Затем блок 186 следования по пути вычисляет значение команды угла поворота рулевого колеса для движения рассматриваемого транспортного средства по целевому пути 12 движения на основе кривизны окружности 14, показанной на фиг. 6.
[0058]
[Уравнение 5]
Однако в вышеприведенном уравнении (7) символ «ρ» обозначает кривизну окружности 14, символ «xfront» обозначает координату оси x в точке 13 наблюдения, а символ «ye» обозначает координату оси Y в точке 13 наблюдения.
[0059] Далее вычислительный цикл и вычислительная нагрузка процессора в каждом процессе будут описаны со ссылкой на фиг. 7. Фиг. 7 является схемой, поясняющей вычислительный цикл и вычислительную нагрузку процессора в каждом процессе устройства 180 управления. Поскольку фиг. 7 соответствует фиг. 2, описание функции каждого блока, показанного на фиг. 7, основано на предыдущем описании.
[0060] Как показано на фиг. 7, вычислительный цикл процессора (также называемый временем арифметической обработки) можно разделить на три категории: высокая скорость, средняя скорость и низкая скорость, в зависимости от блока устройства 180 управления. В частности, вычислительный цикл процессора в процессе генерации статического пути движения продолжительнее, чем вычислительный цикл процессора в процессе генерации динамического пути движения и вычислительный цикл процессора в процессе вычисления значения управляющей команды. Кроме того, вычислительный цикл процессора в процессе генерации динамического пути движения продолжительнее, чем вычислительный цикл процессора в процессе вычисления значения управляющей команды.
[0061] Как показано на фиг. 7, вычислительная нагрузка процессора может быть разделена на три категории: высокая нагрузка, средняя нагрузка и низкая нагрузка, в зависимости от блока устройства 180 управления. В частности, вычислительная нагрузка процессора в процессе генерации статического пути движения больше, чем вычислительная нагрузка процессора в процессе генерации динамического пути движения и вычислительная нагрузка процессора в процессе вычисления значения управляющей команды. Кроме того, вычислительная нагрузка процессора в процессе генерации динамического пути движения больше, чем вычислительная нагрузка процессора в процессе вычисления значения управляющей команды.
[0062] В блоках, относящихся к статическому пути движения (блок 181 генерации границ полосы движения рассматриваемого транспортного средства и блок 182 генерации статического пути движения), процессор выполняет процесс с низкоскоростным вычислительным циклом. Предпочтительно, чтобы статический путь движения, который имеет относительно большую длину пути и отражает картографическую информацию, обновляемую с меньшей частотой, обновлялся с меньшей частотой. Например, процессор выполняет процесс, связанный со статическим путем движения, с вычислительным циклом 2 Гц. С другой стороны, поскольку каждый процесс требует огромного количества данных, таких как картографическая информация, вычислительная нагрузка процессора высока.
[0063] Как показано на фиг. 7, в блоках, относящихся к динамическому пути движения (блок 183 генерации проходимой области, блок 184 генерации динамического пути движения и блок 185 комбинирования путей), процессор выполняет обработку со среднескоростным вычислительным циклом. Предпочтительно, чтобы динамический путь движения, который необходимо обновлять в соответствии с окружающей средой рассматриваемого транспортного средства и имеет относительно короткую длину пути, обновлялся с немного большей частотой. Например, процессор выполняет процесс, связанный с динамической путем движения, с вычислительным циклом 10 Гц. С другой стороны, поскольку каждый процесс требует немного больших данных, таких как результаты обнаружения, обнаруженные датчиком 140 измерения расстояния, и захваченные изображения камеры 150, вычислительная нагрузка процессора немного больше.
[0064] Как показано на фиг. 7, в блоке, относящемся к следованию по пути (блок 186 следования по пути), процессор выполняет процесс с высокоскоростным вычислительным циклом. Предпочтительно, чтобы процесс следования по пути, требующий управления с обратной связью, обновлялся с большей частотой. Например, процессор выполняет процесс, связанный со следованием по пути, с вычислительным циклом 10 Гц. С другой стороны, поскольку каждый процесс требует только относительно малых данных, таких как модель прямого наблюдения, вычислительная нагрузка процессора мала.
[0065] Как описано выше, в настоящем варианте осуществления, назначая вычислительный цикл каждому блоку в соответствии с вычислительной нагрузкой, возможно предотвратить, например, обновление с высокой частотой статического пути движения с высокой вычислительной нагрузкой, тем самым уменьшая вычислительную нагрузку всего устройства 180 управления.
[0066] Далее со ссылкой на фиг. 8A и фиг. 8B будет описан процесс коррекции для статического пути движения, выполняемый блоком 184 генерации динамического пути движения и блоком 185 комбинирования путей. В нижеследующем пояснении тот же процесс может выполняться в блоке 185 комбинирования путей. Фиг. 8A является схемой, поясняющей процесс коррекции для статического пути движения, а фиг. 8B является диаграммой каждого статического пути движения в каждом блоке, показанном на фиг. 8A.
[0067] Блок 184 генерации динамического пути движения корректирует статический путь движения посредством отражения расстояние движения рассматриваемого транспортного средства в течение периода, в течение которого генерируется динамический путь движения, в статическом пути движения. В частности, сначала блок 184 генерации динамического пути движения оценивает местоположение рассматриваемого транспортного средства на карте на основе картографической информации и результатов обнаружения датчика 140 измерения расстояния. Затем, как показано на фиг. 8A, блок 184 генерации динамического пути движения выполняет процесс преобразования координат для преобразования координаты, задающей статический путь движения, из системы координат с центром в местоположении рассматриваемого транспортного средства в систему координат с центром в местоположении на карте на основе оцененного местоположения рассматриваемого транспортного средства на карте. Система координат с центром в местоположении рассматриваемого транспортного средства также называется системой координат транспортного средства. Система координат с центром в местоположении на карте также называется статической системой координат.
[0068] На фиг. 8A преобразование координат из системы координат транспортного средства в статическую систему координат соответствует преобразованию координат A. На фиг. 8B статический путь движения, который задан в системе координат транспортного средства и обновляется с вычислительным циклом (низкая скорость) процессора в процессе генерации статического пути движения, показан статическим путем R0 движения.
[0069] Блок 184 генерации динамического пути движения выполняет процесс преобразования координат из системы координат транспортного средства в статическую систему координат для статического пути движения, и в последующем процессе обрабатывает статический путь движения с вычислительным циклом процессора (средняя скорость) процесса генерации динамического пути движения. Таким образом, частота обновления статического пути движения изменяется от вычислительного цикла (низкая скорость) процессора в процессе генерации статического пути движения до вычислительного цикла (средняя скорость) процессора в процессе генерации динамического пути движения. На фиг. 8В статический путь движения, который задан в статической системе координат и обновляется с вычислительным циклом процессора в процессе генерации динамического пути движения, показан статическим путем R1 движения.
[0070] Блок 184 генерации динамического пути движения выполняет процесс преобразования координат, чтобы преобразовать координаты, задающие статический путь движения, из статической системы координат в систему координат транспортного средства на основе оцененного местоположения рассматриваемого транспортного средства на карте. На фиг. 8В статический путь движения, который задан системой координат транспортного средства и обновляется с вычислительным циклом процессора в процессе генерации динамического пути движения, показан статическим путем R2 движения. Статический путь R2 движения является путем движения, который отражает расстояние движения рассматриваемого транспортного средства относительно статического пути R2 движения.
[0071] Далее будет описан процесс управления для помощи при движении транспортного средства. Фиг. 9 является блок-схемой, иллюстрирующей последовательность операций процесса управления настоящего варианта осуществления. Описанный ниже процесс управления движением выполняется устройством 180 управления. Кроме того, описанный ниже процесс управления движением начинается, когда включается включатель зажигания или включатель питания, и выполняется повторно в предварительно определенном цикле (например, каждые 10 миллисекунд) до тех пор, пока включатель зажигания или включатель питания не будет выключен. Вычислительный цикл процессора на каждом этапе, показанном на фиг. 9, удовлетворяет соотношению вычислительного цикла процессора в каждом блоке, показанном на фиг. 7.
[0072] На этапе S1 устройство 180 управления генерирует границы полосы движения рассматриваемого транспортного средства. Например, устройство 180 управления получает информацию о текущем местоположении рассматриваемого транспортного средства от устройства 110 определения местоположения рассматриваемого транспортного средства, получает информацию о границах статического пути движения из картографической базы 120 данных и получает информацию плана действий из навигационной системы. Устройство 180 управления генерирует границы полосы движения рассматриваемого транспортного средства, которые указывают границы между полосой движения рассматриваемого транспортного средства и другим, чем упомянутая полоса движения рассматриваемого транспортного средства, на основе входной информации.
[0073] На этапе S2 устройство 180 управления генерирует статический путь движения на основе информации о границах полосы движения рассматриваемого транспортного средства, сгенерированной на этапе S1. Сначала устройство 180 управления устанавливает длину пути для статического пути движения. Например, устройство 180 управления устанавливает длину пути для статического пути движения, чтобы включал в себя по меньшей мере два поворота на дороге, по которой движется рассматриваемое транспортное средство. Кроме того, например, устройство 180 управления устанавливает длину пути для статического пути движения, чтобы включал в себя участок прямого пути на предварительно определенном расстоянии или более. Затем устройство 180 управления генерирует, например, путь движения, на котором изменение поперечного ускорения, применяемого к рассматриваемому транспортному средству, минимизируется, когда упомянутое транспортное средство движется по пути движения на карте, в качестве статического пути движения. Например, устройство 180 управления генерирует статический путь движения с использованием функции оценки, которая представляет собой квадратичную выпуклую функцию, и метод Ньютона.
[0074] На этапе S3 устройство 180 управления генерирует проходимую область. Например, устройство 180 управления получает информацию о границах динамического пути движения от датчика 140 измерения расстояния и камеры 150 и распознает границы динамического пути движения. Устройство 180 управления генерирует область, которая задается границами динамического пути движения и по которой может двигаться рассматриваемое транспортное средство, в качестве проходимой области.
[0075] На этапе S4 устройство 180 управления генерирует динамический путь движения. Устройство 180 управления генерирует путь движения, соответствующий окружающей среде рассматриваемого транспортного средства, в качестве динамического пути движения на основе статического пути движения, сгенерированного на этапе S2, и проходимой области, сгенерированной на этапе S3. В данном случае, устройство 180 управления выполняет процесс коррекции статического пути движения с другой частотой обновления и генерирует динамический путь движения с использованием скорректированного статического пути движения.
[0076] На этапе S5 устройство 180 управления генерирует целевой путь движения посредством комбинирования динамического пути движения и статического пути движения. Устройство 180 управления генерирует целевой путь движения, содержащий динамический путь движения и статический путь движения, на основе статического пути движения, сгенерированного на этапе S2, и динамического пути движения, сгенерированного на этапе S4. Устройство 180 управления комбинирует динамический путь движения и статический путь движения, так что конечная точка динамического пути движения располагается на статическом пути движения.
[0077] На этапе S6 устройство 180 управления генерирует значение управляющей команды для движения рассматриваемого транспортного средства по целевому пути движения. Устройство 180 управления генерирует значение управляющей команды (например, значение команды угла поворота рулевого колеса) на основе целевого пути движения, сгенерированного на этапе S5. После того, как значение управляющей команды сгенерировано устройством 180 управления, устройство 180 управления завершает процесс управления, показанный на фиг. 9.
[0078] Как описано выше, в настоящем варианте осуществления устройство 180 управления получает информацию о границах статического пути движения между путем движения рассматриваемого транспортного средства и другим, чем упомянутый путь движения рассматриваемого транспортного средства, из картографической базы 120 данных, которая хранит картографическую информацию, и получает информацию о границах динамического пути движения, отличных от границ статического пути движения, от датчика 140 измерения расстояния и камеры 150, которые обнаруживают окружающую среду рассматриваемого транспортного средства. Затем устройство 180 управления генерирует статический путь движения, по которому может двигаться рассматриваемое транспортное средство, на основе информации о границах статического пути движения, и генерирует динамический путь движения, который короче статического пути движения и соответствует окружающей среде рассматриваемого транспортного средства, на основе информации о статическом пути движения и границах динамического пути движения. Устройство 180 управления управляет рассматриваемым транспортным средством, чтобы рассматриваемое транспортное средством двигалось по целевому пути движения, включающему в себя статический путь движения и динамический путь движения. Поскольку динамический путь движения соответствует окружающей среде рассматриваемого транспортного средства и основан на статическом пути движения для плавного движения рассматриваемого транспортного средства, возможно составить план движения, который совместим как с окружающей средой, так и с движением плавно.
[0079] Кроме того, в настоящем варианте осуществления, поскольку информация о границах статического пути движения также включает в себя информацию о местоположениях, удаленных от рассматриваемого транспортного средства, таким образом, он имеет преимущество, заключающееся в том, что ее можно использовать для генерации плавного пути на большие расстояния, который учитывает последующие дорожные ситуации. С другой стороны, информация о границах статического пути движения не включает в себя информацию о динамических окружающих ситуациях и не подходит для движения в соответствии с динамической окружающей средой. Поэтому, чтобы компенсировать динамические окружающие ситуации, в настоящем варианте осуществления динамический путь движения, соответствующий окружающей среде рассматриваемого транспортного средства, генерируется на основе информации о границах динамического пути движения. Кроме того, если путь движения генерируется с использованием только информации о границах динамического пути движения, то будет генерироваться путь движения с резкими изменениями, и движение по этому пути движения может вызвать дискомфорт для людей, находящихся в рассматриваемом транспортном средстве. Поэтому, в настоящем варианте осуществления, чтобы устранить дискомфорт, причиняемый людям, находящимся в рассматриваемом транспортном средстве, динамический путь движения генерируется с использованием статического пути движения, характеризующимся плавностью, не ограничиваясь информацией о границах динамического пути движения. Это обеспечивает движение в соответствии с динамической окружающей средой, чего трудно достичь, используя только информацию о границах статического пути движения.
[0080] Кроме того, в настоящем варианте осуществления информация о границах динамического пути движения включает в себя информацию о динамических окружающих ситуациях, и путь движения может быть сгенерирован на основе информации о границах динамического пути движения, и движение может быть адаптировано к динамической окружающей среде посредством движения по упомянутому пути движения. Однако, поскольку информация о границах динамического пути движения ограничена диапазоном обнаружения датчика рассматриваемого транспортного средства, она не подходит для получения информации о местоположениях, удаленных от рассматриваемого транспортного средства, и генерации пути движения с учетом ситуаций в местоположениях, удаленных от рассматриваемого транспортного средства. Поэтому, в настоящем варианте осуществления также рассматривается статический путь движения, сгенерированный с использованием информации за пределами диапазона обнаружения датчика, обнаруживающего границы динамического пути движения, в дополнение к границам динамического пути движения. Это позволяет сгенерировать путь движения, который учитывает ситуации за пределами обнаружения датчика, то есть вдали от рассматриваемого транспортного средства.
[0081] В настоящем варианте осуществления генерируют динамический путь движения, который короче статического пути движения. Посредством генерации пути движения на большое расстояние, возможно генерировать плавный путь на большом расстоянии с учетом последующей ситуации движения. Однако, с другой стороны этого преимущества, вычисление пути на большое расстояние имеет большую вычислительную нагрузку. Вычисление пути движения для той же длины, что и статический путь движения, на основе информации о границах динамического пути движения, также имеет высокую вычислительную нагрузку. Поэтому, в настоящем варианте осуществления вычислительная нагрузка для генерации динамического пути движения может быть снижена посредством генерации динамического пути движения, который короче статического пути движения.
[0082] В настоящем варианте осуществления информация о границах статического пути движения включает в себя информацию за пределами диапазона обнаружения датчика для обнаружения границ динамического пути движения, и статический путь движения генерируется с использованием информации за пределами диапазона обнаружения датчика для обнаружения границ динамического пути движения. В генерации статического пути движения с использованием информации о границах статического пути движения обычно используются данные, хранящиеся в памяти, или данные, уже хранящиеся в облаке. Таким образом, информация за пределами диапазона обнаружения упомянутого датчика может быть получена стабильно, и может быть сгенерирован статический путь движения на большое расстояние. С другой стороны, поскольку информация о границах динамического пути движения основана на информации, обнаруженной упомянутым датчиком, она ограничивается информацией в пределах диапазона обнаружения упомянутого датчика. Поскольку информация о границах динамического пути движения включает в себя информацию, которая является информацией вблизи рассматриваемого транспортного средства, которая не включена в информацию о границах статического пути движения (например, информацию о динамических объектах), возможно адаптироваться к окружающей среды посредством получения информации о границах динамического пути движения и генерации динамического пути движения на основе информации о динамическом пути движения.
[0083] В настоящем варианте осуществления информация о границах статического пути движения включает в себя информацию о полосе движения, по которой движется рассматриваемое транспортное средство, и информацию о планируемой полосе движения, которая отличается от упомянутой полосы движения и по которой планируется движение рассматриваемого транспортного средства, и статический путь движения генерируется с использованием информации о полосе движения, по которой движется транспортное средство, и информации о запланированной полосе движения, которая отличается от упомянутой полосы движения и по которой планируется движение рассматриваемого транспортного средства. Например, когда рассматриваемое транспортное средство въезжает на объединяющуюся полосу движения или, когда рассматриваемое транспортное средство поворачивает направо и налево, статический путь движения может быть сгенерирован с учетом не только полосы движения, по которой в настоящее время движется рассматриваемое транспортное средство, но также ситуаций на полосе движения после въезда или поворота направо или налево. Это позволяет сгенерировать более плавный путь движения.
[0084] В настоящем варианте осуществления устройство 180 управления вычисляет значение управляющей команды для движения рассматриваемого транспортного средства по целевому пути движения и управляет рассматриваемым транспортным средством на основе значения управляющей команды. Это позволяет рассматриваемому транспортному средству плавно двигаться в соответствии с окружающей средой.
[0085] В настоящем варианте осуществления устройство 180 управления генерирует целевой путь движения посредством комбинирования динамического пути движения и статического пути движения, так что конечная точка динамического пути движения располагается на статическом пути движения. Таким образом, даже при объединении путей движения, сгенерированных на основе разной информации, возможно устранить возникновение точки разрыва кривизны в точке комбинирования. В результате возможно плавное перемещение рассматриваемого транспортного средства по целевому пути движения.
[0086] В настоящем варианте осуществления вычислительный цикл процессора в процессе генерации статического пути движения продолжительней, чем вычислительный цикл процессора в процессе генерации динамического пути движения. Это позволяет обновлять динамический путь движения с помощью короткого цикла для адаптации условий вокруг рассматриваемого транспортного средства, которые изменяются динамически, тем самым делая возможным движение рассматриваемого транспортного средства в ответ на окружающую среду.
[0087] В общем, информация о границах статического пути движения не изменяется динамически и является стабильной в качестве информации. Поэтому, даже если статический путь движения обновляется с высокой частотой, форма статического пути движения существенно не меняется. Однако, поскольку рассматриваемое транспортное средство перемещается, даже когда рассматриваемое транспортное средство управляется на основе статического пути движения и динамического пути движения, местоположение рассматриваемого транспортного средства изменилось с момента последнего расчета статического пути движения. Поэтому, также необходимо генерировать статический путь движения, начиная с местоположения рассматриваемого транспортного средства после перемещения (также называемого новым местоположением). Таким образом, даже если статический путь движения не вычисляется с высокой частотой, статический путь движения, начиная с местоположения рассматриваемого транспортного средства после перемещения, также должен быть сгенерирован, и поэтому в настоящем варианте осуществления вычислительный цикл процессора в процессе генерации статического пути движения продолжительнее, чем вычислительный цикл процессора в процессе генерации динамического пути движения. Это позволяет сгенерировать плавный статический путь движения и, в конечном итоге, динамический путь движения, уменьшая при этом вычислительную нагрузку для генерации статического пути движения.
[0088] Вычислительный цикл процессора в процессе генерации статического пути движения продолжительнее, чем вычислительный цикл процессора в процессе вычисления значения управляющей команды. Это позволяет выполнять управление следованием с более высокой степенью отслеживания сгенерированного пути движения, поскольку значение управляющей команды обновляется чаще. С точки зрения стабильности управления возможно повысить стабильность управления следованием. Те же эффекты могут быть получены, если вычислительный цикл процессора в процессе генерации статического пути движения продолжительнее, чем вычислительный цикл процессора в процессе генерации динамического пути движения, и, кроме того, вычислительный цикл процессора в процессе генерации статического пути движения продолжительнее, чем вычислительный цикл процессора в процессе вычисления значения управляющей команды.
[0089] Вычислительный цикл процессора в процессе генерации динамического пути движения продолжительнее, чем вычислительный цикл процессора в процессе вычисления значения управляющей команды. Это позволяет выполнять управление следованием с более высокой степенью отслеживания сгенерированного пути движения, поскольку значение управляющей команды обновляется чаще. С точки зрения стабильности управления возможно повысить стабильность управления следованием. Те же эффекты могут быть получены, если вычислительный цикл процессора в процессе генерации статического пути движения продолжительнее, чем вычислительный цикл процессора в процессе генерации динамического пути движения, и, кроме того, вычислительный цикл процессора в процессе генерации динамического пути движения продолжительнее, чем вычислительный цикл процессора в процессе вычисления значения управляющей команды.
[0090] Кроме того, в настоящем варианте осуществления, в процессе генерации динамического пути движения, устройство 180 управления корректирует статический путь движения посредством отражения расстояния движения рассматриваемого транспортного средства в течение периода, в течении которого генерируется динамический путь движения, в статическом пути движения. Это позволяет генерировать динамический путь движения на основе информации о статическом пути движения, соответствующей текущему местоположению рассматриваемого транспортного средства, даже когда частота обновления статического пути движения ниже, чем частота обновления динамического пути движения. В результате возможно улучшить стабильность управления следованием по целевому пути движения.
[0091] Кроме того, в настоящем варианте осуществления устройство 180 управления оценивает местоположение рассматриваемого транспортного средства на карте на основе картографической информации и результатов обнаружения датчика 140 измерения расстояния, и в процессе коррекции статического пути движения, выполняет процесс преобразования координат, чтобы преобразовать координату, задающую статический путь движения, из системы координат с центром в местоположении рассматриваемого транспортного средства в систему координат с центром в местоположении на карте на основе местоположения рассматриваемого транспортного средства на карте, и затем корректирует статический путь движения с использованием вычислительного цикла процессора в процессе генерации динамического пути движения. Поскольку процесс коррекции статического пути движения выполняется на основе высокоточной картографической информации, точность коррекции статического пути движения может быть повышена.
[0092] Кроме того, в настоящем варианте осуществления устройство 180 управления генерирует путь движения с минимальным изменением кривизны в качестве статического пути движения. Это позволяет рассматриваемому транспортному средству плавно двигаться независимо от форм дороги.
[0093] Кроме того, в настоящем варианте осуществления длина пути для статического пути движения больше, чем длина пути для динамического пути движения. Это позволяет, например, обеспечить план движения для плавного движения рассматриваемого транспортного средства даже в диапазоне, который не может быть обнаружен датчиком 140 измерения расстояния.
[0094] Кроме того, в настоящем варианте осуществления устройство 180 управления устанавливает длину пути для статического пути движения, чтобы включал в себя по меньшей мере два поворота. Так как начальная точка и конечная точка поворота включены в статический путь движения, то возможно устранить возникновение точек разрыва кривизны в начальной точке и конечной точке поворота. В результате рассматриваемое транспортное средство может плавно двигаться по целевому пути движения.
[0095] Кроме того, в настоящем варианте осуществления устройство 180 управления устанавливает длину пути для статического пути движения, чтобы включал в себя участок прямого пути на предварительно определенном расстоянии или более после поворота. Возможно устранить возникновение точек разрыва кривизны на участке между прямым путем от поворота. В результате рассматриваемое транспортное средство может плавно двигаться по целевому пути движения.
[0096] Кроме того, в настоящем варианте осуществления устройство 180 управления устанавливает длину пути для динамического пути движения, так что динамический путь движения включен в диапазон обнаружения датчика 140 измерения расстояния. Это позволяет использовать результаты обнаружения датчика 140 измерения расстояния для генерации динамического пути движения. В результате возможно сгенерировать динамический путь движения, соответствующую окружающей среде рассматриваемого транспортного средства.
[0097] Кроме того, в настоящем варианте осуществления устройство 180 управления идентифицирует границы динамического пути движения, которые представляют собой разметку поверхности дороги, в качестве первых границ динамического пути движения и идентифицирует границы динамического пути движения, которые представляют собой препятствия, существующие вокруг рассматриваемого транспортного средства, в качестве вторых границ динамического пути движения. Это позволяет, например, в процессе генерации динамического пути движения изменить степень влияния первых границ динамического пути движения на динамический путь движения и степень влияния вторых границ динамического пути движения на динамический путь движения. В результате, например, возможно сгенерировать динамический путь движения, который отражает движение, чтобы избежать препятствий, а не движение, чтобы избежать пересечения белой линии.
[0098] Кроме того, в настоящем варианте осуществления устройство 180 управления генерирует динамический путь движения, используя соотношение, в котором весовой коэффициент ah, весовой коэффициент as, и весовой коэффициент alp уменьшаются в этом порядке. Это обеспечивает генерацию динамического пути движения, чтобы избежать препятствий при их наличии. Когда препятствий нет, возможно сгенерировать динамический путь движения, чтобы избежать пересечения белой линии. Независимо от наличия препятствий, возможно сгенерировать динамический путь движения для плавного движения. Другими словами, возможно управлять рассматриваемым транспортным средством в соответствии с фактической окружающей средой рассматриваемого транспортного средства.
[0099] Следует принимать во внимание, что варианты осуществления, объясненные ранее, описаны для облегчения понимания настоящего изобретения и не описаны для ограничения настоящего изобретения. Поэтому предполагается, что элементы, раскрытые в вышеприведенных вариантах осуществления, включают в себя все изменения в конструкции и эквиваленты, подпадающие под объем технических сведений в настоящем изобретении.
[0100] Например, в вышеописанном варианте осуществления случаи, в которых блок 184 генерации динамического пути движения и блок 185 комбинирования путей выполняют процесс коррекции статического пути движения (см. Фиг. 8A и фиг. 8B), были описаны в качестве примера, но блок 186 следования по пути может выполнять процесс коррекции целевого пути движения. Другими словами, в процессе вычисления значения управляющей команды устройство 180 управления может корректировать целевой путь движения посредством отражения расстояния движения рассматриваемого транспортного средства в течение периода, в течение которого вычисляется значение управляющей команды, в целевом пути движения. Это позволяет вычислять значения управляющих команд на основе информации о целевом пути движения, соответствующем текущему местоположению рассматриваемого транспортного средства, даже когда частота обновления целевого пути движения ниже, чем частота обновления значения управляющей команды. В результате возможно улучшить стабильность управления следованием по целевому пути движения.
[0101] Устройство 180 управления может оценивать местоположение рассматриваемого транспортного средства на карте на основе картографической информации и результатов обнаружения датчика 140 измерения расстояния в процессе коррекции целевого пути движения на основе местоположения рассматриваемого транспортного средства на карте, выполнять процесс преобразования координат, чтобы преобразовать координату, задающую целевой путь движения, из системы координат с центром в местоположении рассматриваемого транспортного средства в систему координат с центром в местоположении на карте, и затем корректировать целевой путь движения с использованием вычислительного цикла процессора в процессе вычисления значения управляющей команды. Поскольку процесс коррекции целевого пути движения выполняется на основе высокоточной картографической информации, точность коррекции целевого пути движения может быть улучшена.
[0102] Кроме того, например, в вышеописанном варианте осуществления в качестве примера статического пути движения был описан путь движения, на котором изменение поперечного ускорения рассматриваемого транспортного средства равно или меньше предварительно определенного значения, но путь движения с учетом поперечного ускорения рассматриваемого транспортного средства не ограничивается статическим путем движения. Например, блок 184 генерации динамического пути движения может генерировать динамический путь движения, который минимизирует изменение поперечного ускорения, применяемого к рассматриваемому транспортному средству, когда транспортное средство движется по пути движения на карте, на основе информации о границах динамического пути движения. Это позволяет, например, плавно избегать препятствия (например, проезжать), когда препятствия существуют вокруг рассматриваемого транспортного средства. Кроме того, когда рассматриваемое транспортное средство движется в точке комбинирования динамического пути движения и статического пути движения, поперечное ускорение, применяемое к рассматриваемому транспортному средству, может быть подавлено, и движение рассматриваемого транспортного средства может быть плавно переведено из динамического пути движения в статический путь движения. Точно так же возможно плавно переводить движение рассматриваемого транспортного средства из статического пути движения в динамический путь движения. В результате возможно устранить дискомфорт, причиняемый людям, находящимся в рассматриваемом транспортном средстве, из-за разницы в пути движения.
Описание ссылочных позиций
[0103]
100 Устройство помощи при движении
110 Устройство определения местоположения рассматриваемого транспортного средства
120 Картографическая база данных
130 Датчик скорости транспортного средства
140 Датчика измерения расстояния
150 Камера
160 Устройство ввода
170 Приводной механизм
180 Устройство управления (Процессор)
190 Датчик скорости рыскания.
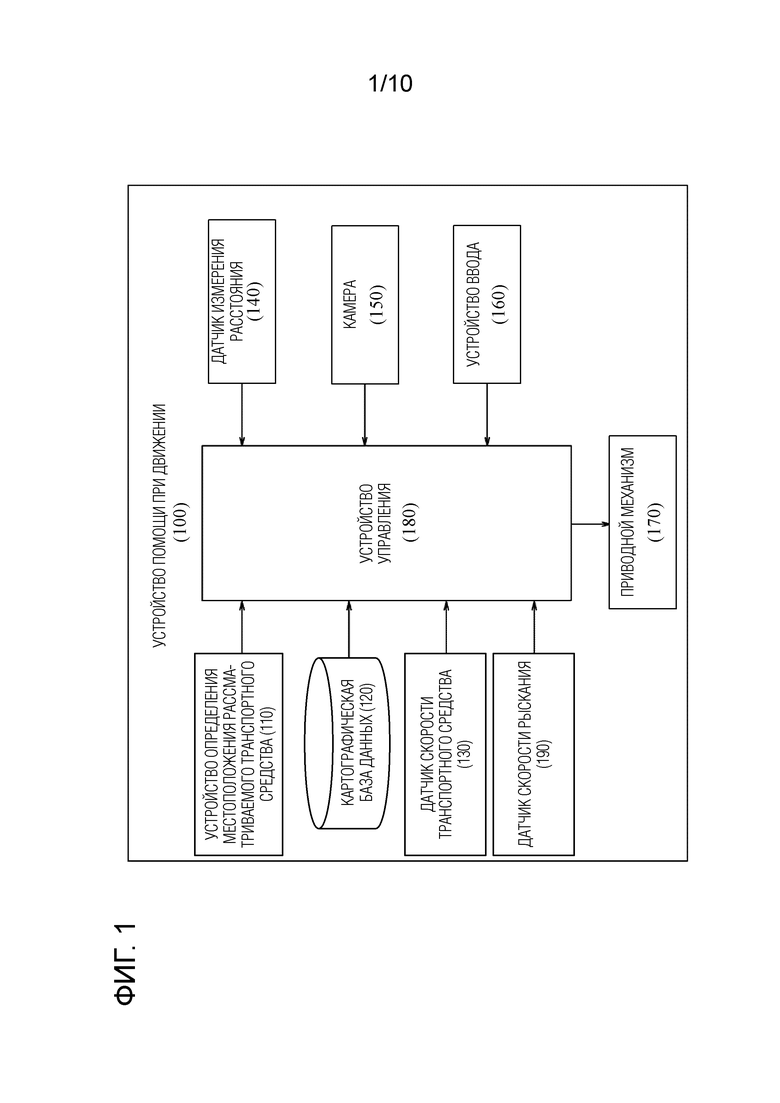
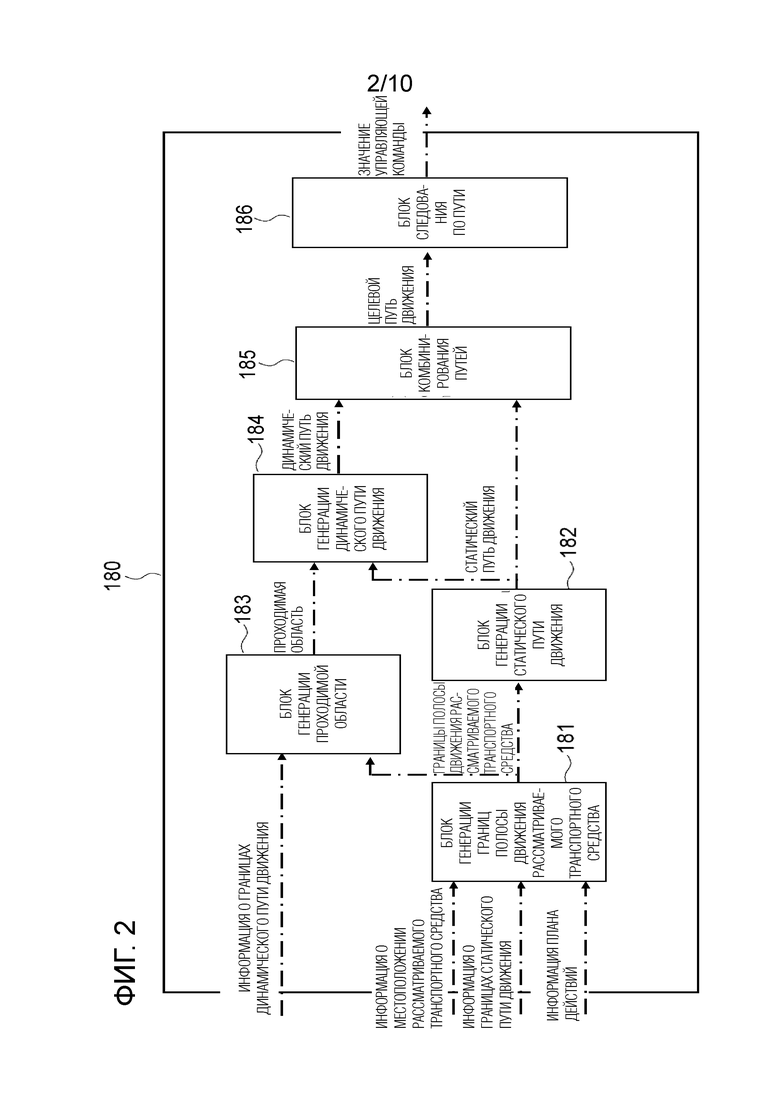
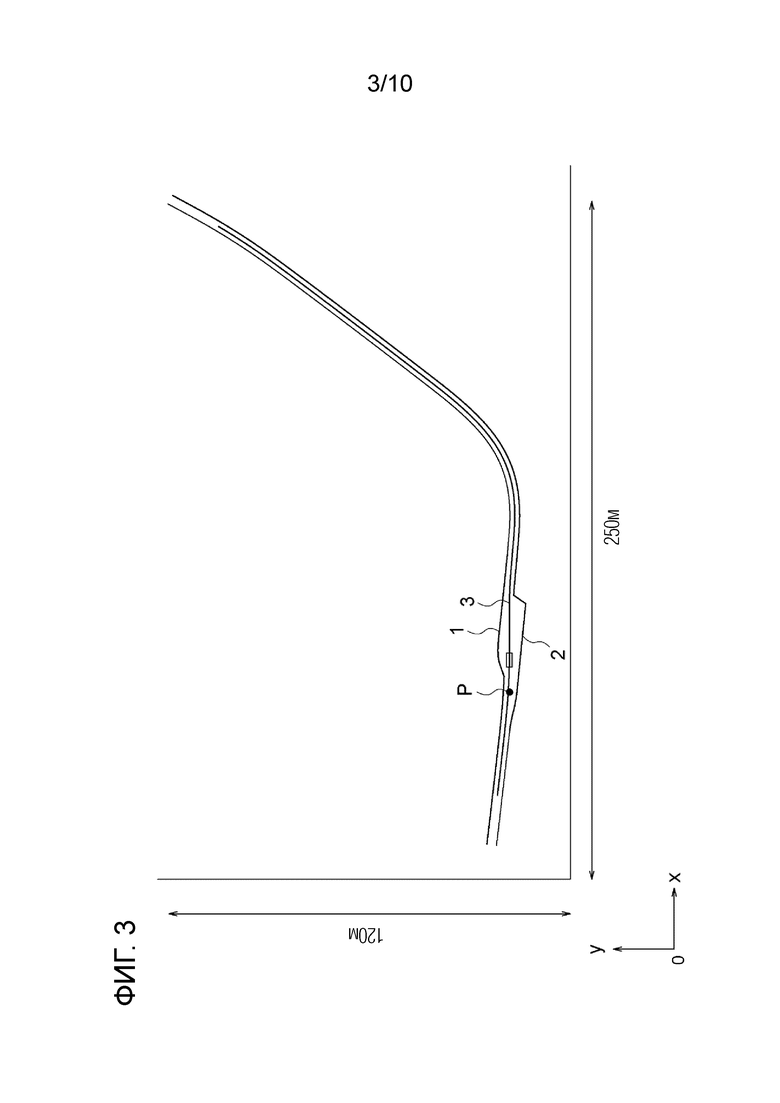
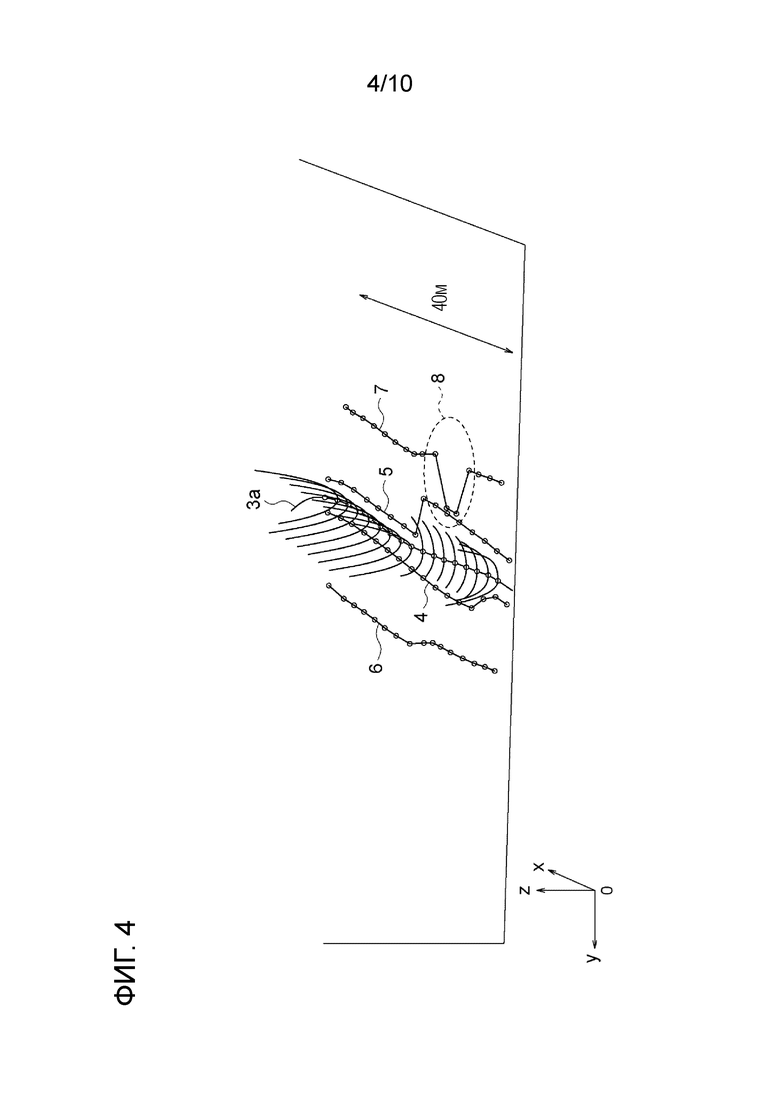
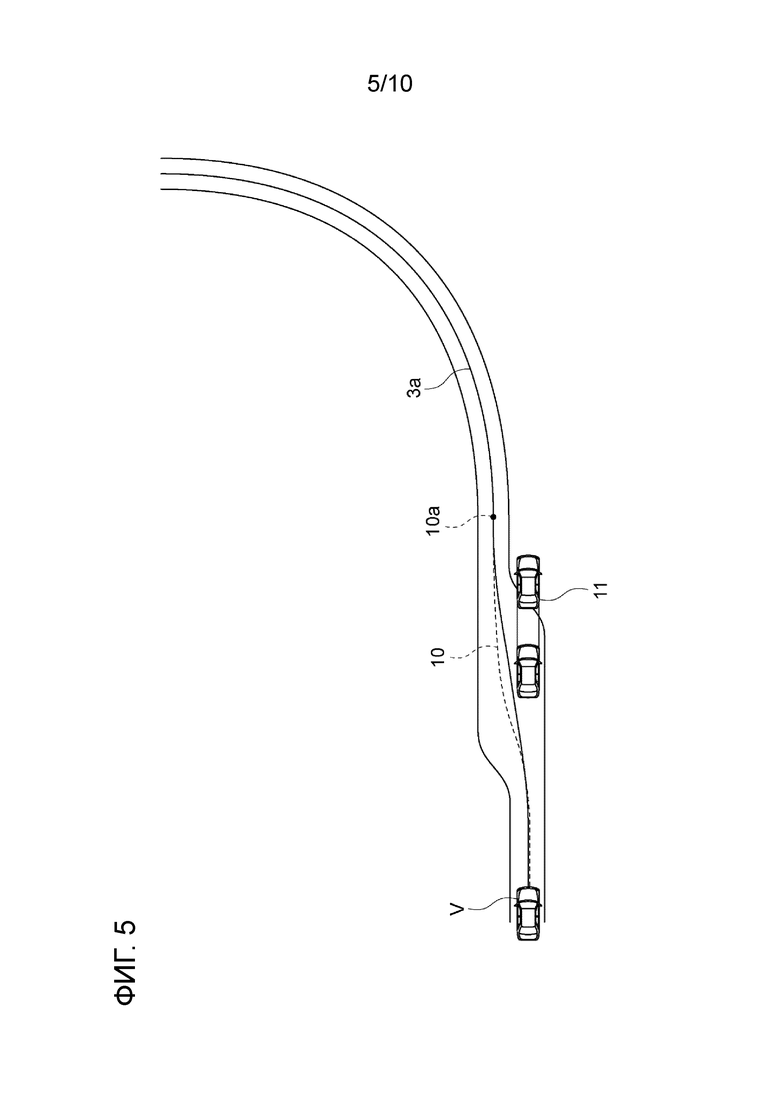
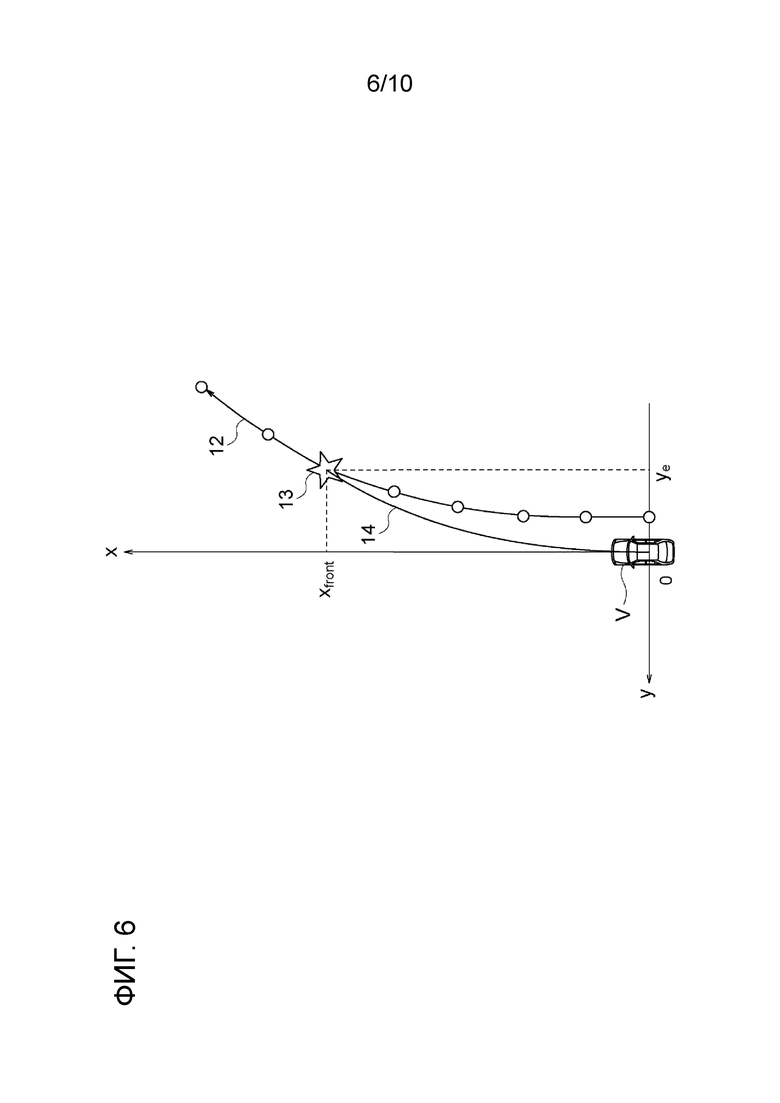
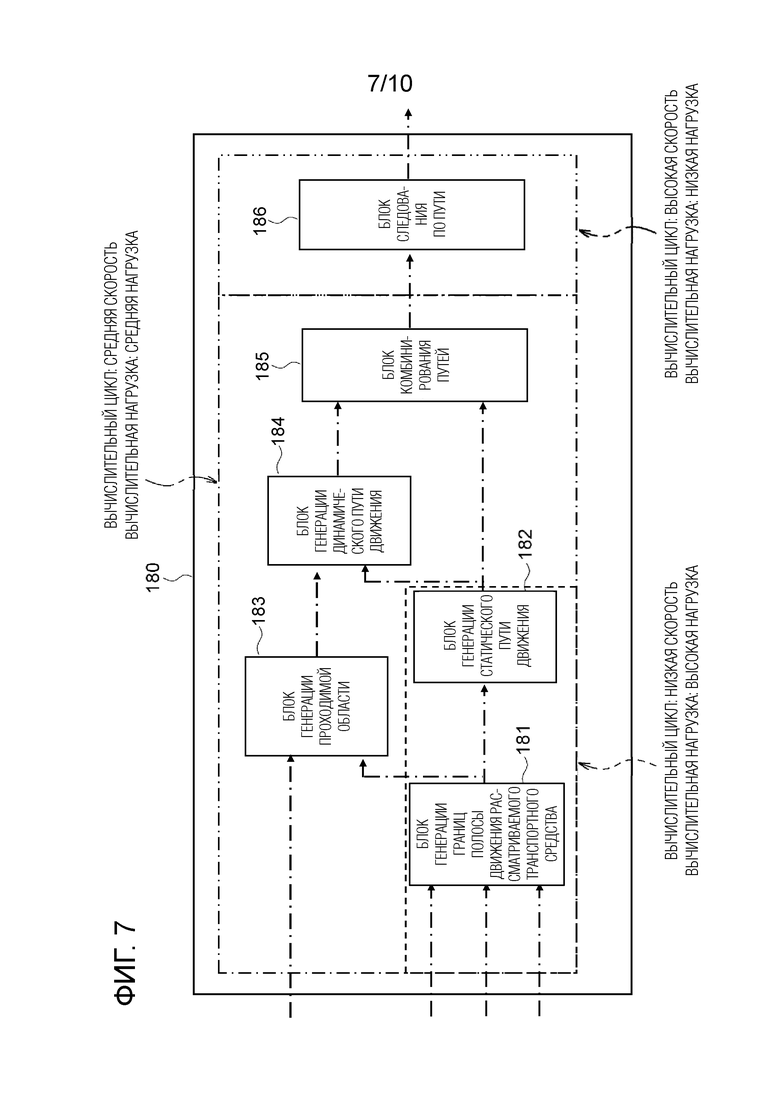
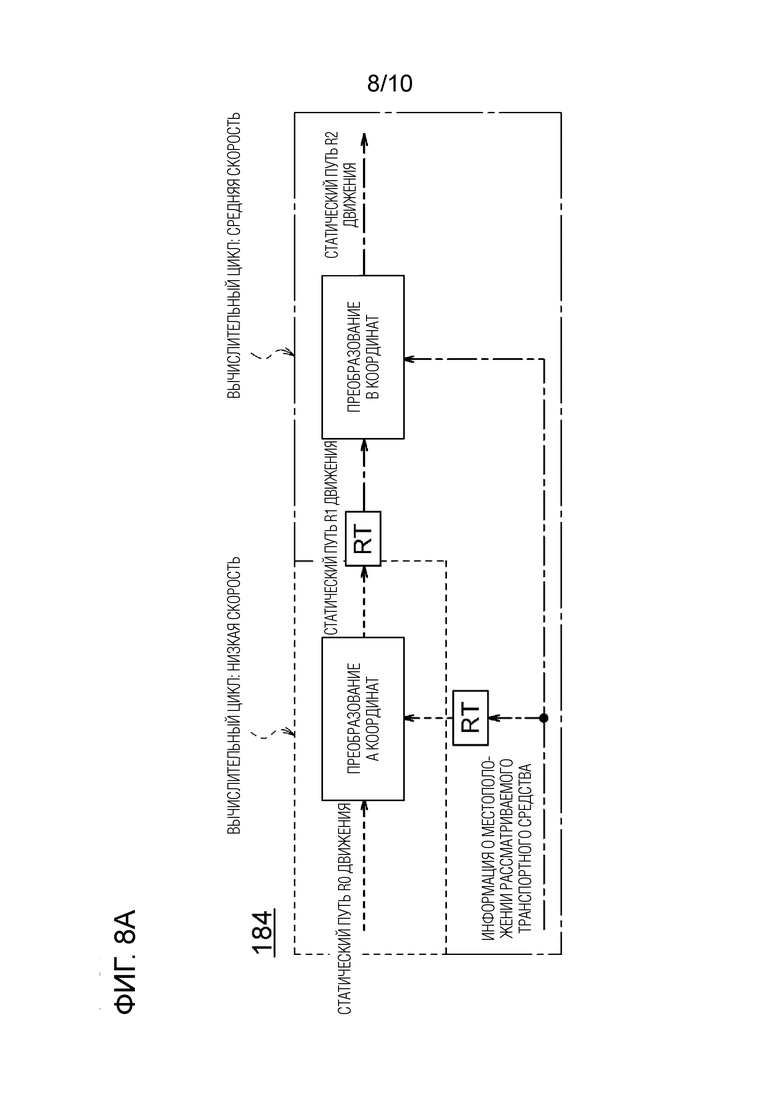
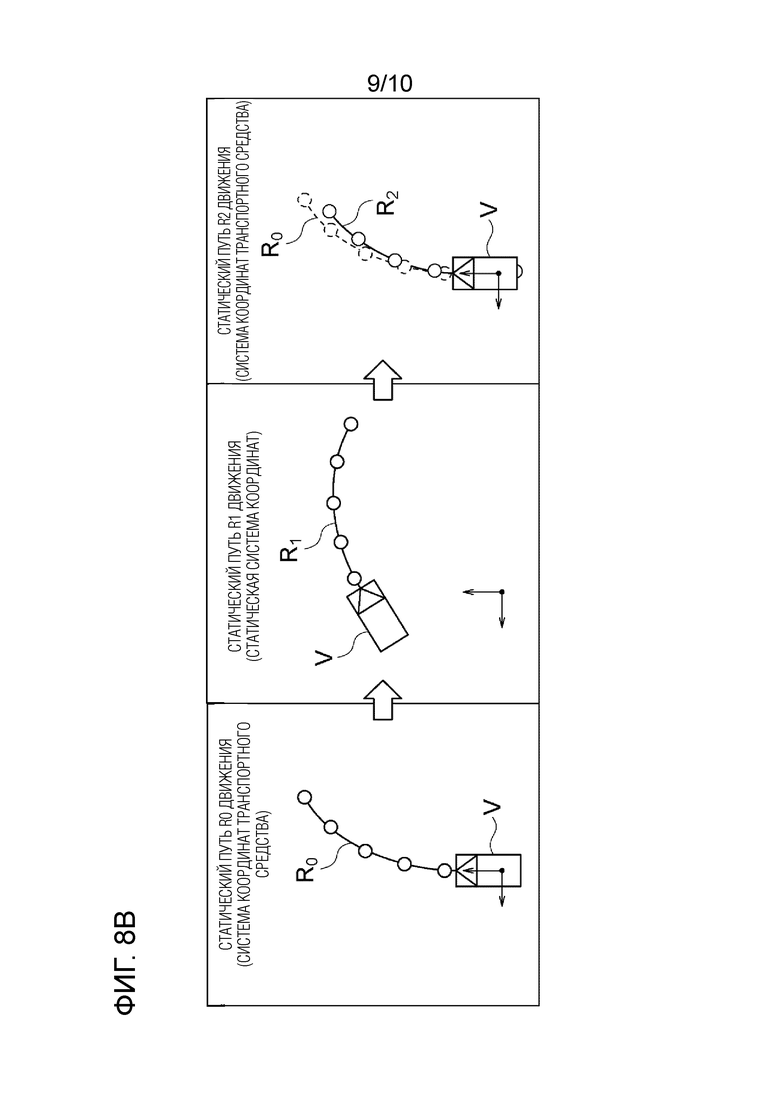
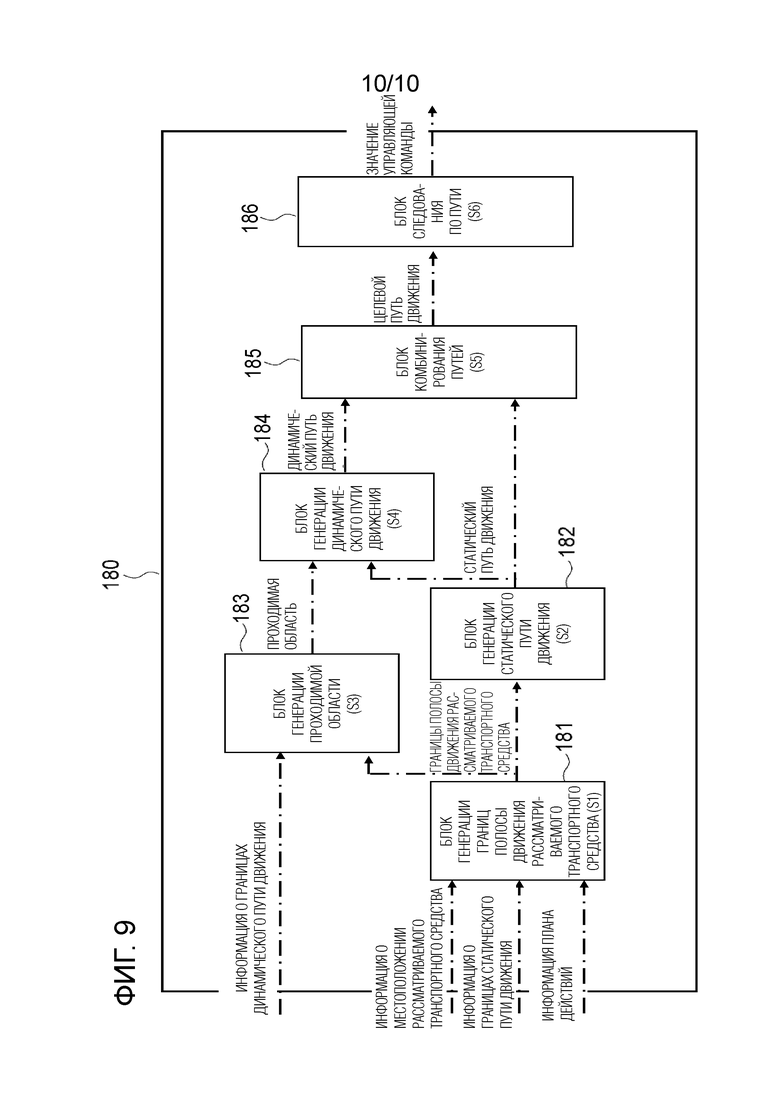
Получают от устройства для хранения картографической информации информацию о границах статического пути движения между путем движения рассматриваемого транспортного средства и другим, чем упомянутый путь движения. Получают от датчика для обнаружения окружающей среды рассматриваемого транспортного средства информацию о границах динамического пути движения, отличных от границ статического пути движения. Генерируют на основе информации о границах статического пути движения статический путь движения, по которому рассматриваемое транспортное средство может двигаться. Генерируют на основе информации о статическом пути движения и границах динамического пути движения динамический путь движения, который короче статического пути движения и соответствует окружающей среде. Управляют рассматриваемым транспортным средством для движения по целевому пути движения, включающему в себя статический путь движения и динамический путь движения. При этом вычислительный цикл процессора в процессе генерации статического пути движения продолжительней, чем вычислительный цикл процессора в процессе генерации динамического пути движения. Предложено также устройство помощи при движении. Достигается обеспечение способа помощи при движении и устройства помощи при движении, которые могут составлять план движения, совместимый как с реагированием на окружающую среду, так и с плавным движением. 2 н. и 18 з.п. ф-лы, 10 ил.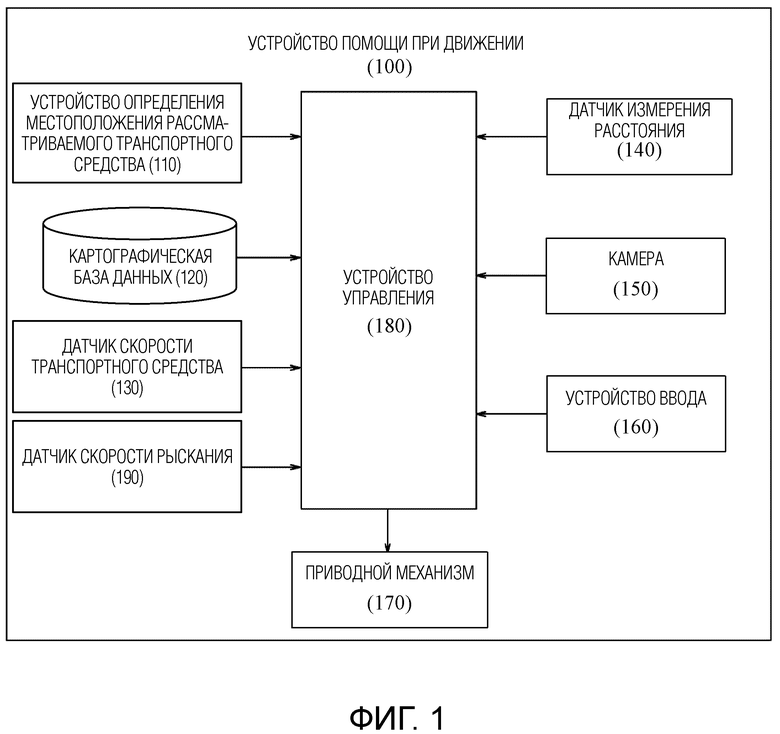
1. Способ помощи при движении для транспортного средства, выполняемый процессором, содержащий этапы, на которых:
получают от устройства для хранения картографической информации информацию о границах статического пути движения между путем движения рассматриваемого транспортного средства и другим, чем упомянутый путь движения;
получают от датчика для обнаружения окружающей среды рассматриваемого транспортного средства информацию о границах динамического пути движения, отличных от границ статического пути движения;
генерируют на основе информации о границах статического пути движения статический путь движения, по которому рассматриваемое транспортное средство может двигаться;
генерируют на основе информации о статическом пути движения и границах динамического пути движения динамический путь движения, который короче статического пути движения и соответствует окружающей среде; и
управляют рассматриваемым транспортным средством для движения по целевому пути движения, включающему в себя статический путь движения и динамический путь движения,
при этом вычислительный цикл процессора в процессе генерации статического пути движения продолжительней, чем вычислительный цикл процессора в процессе генерации динамического пути движения.
2. Способ помощи при движении по п. 1, в котором:
информация о границах статического пути движения включает в себя информацию за пределами диапазона обнаружения упомянутого датчика для обнаружения границ динамического пути движения, и
статический путь движения генерируют с использованием информации за пределами диапазона обнаружения упомянутого датчика для обнаружения границ динамического пути движения.
3. Способ помощи при движении по п. 1 или 2, в котором:
информация о границах статического пути движения включает в себя информацию о полосе движения, по которой движется рассматриваемое транспортное средство, и информацию о запланированной полосе движения, которая отличается от упомянутой полосы движения и по которой планируют движение рассматриваемого транспортного средства, и
статический путь движения генерируют с использованием информации о полосе движения, по которой движется рассматриваемое транспортное средство, и информации о запланированной полосе движения, которая отличается от упомянутой полосы движения и по которой планируют движение рассматриваемого транспортного средства.
4. Способ помощи при движении по любому из пп. 1-3, содержащий этапы, на которых:
вычисляют значения управляющей команды для движения рассматриваемого транспортного средства по целевому пути движения; и
управляют рассматриваемым транспортным средством на основе значения управляющей команды.
5. Способ помощи при движении по любому из пп. 1-4, содержащий этап, на котором:
генерируют в процессе генерации статического пути движения статический путь движения, в котором изменение поперечного ускорения, применяемого для рассматриваемого транспортного средства, когда рассматриваемое транспортное средство движется, меньше, чем предварительно определенное значение, на основе информации о границах статического пути движения.
6. Способ помощи при движении по любому из пп. 1-5, содержащий этап, на котором:
генерируют в процессе генерации динамического пути движения динамический путь движения, в котором изменение поперечного ускорения, применяемого для рассматриваемого транспортного средства, когда рассматриваемое транспортное средство движется, меньше, чем предварительно определенное значение, на основе информации о статическом пути движения и границах динамического пути движения.
7. Способ помощи при движении по любому из пп. 1-6, содержащий этап, на котором:
генерируют целевой путь движения посредством комбинирования динамического пути движения и статического пути движения таким образом, чтобы конечная точка динамического пути движения находилась на статическом пути движения.
8. Способ помощи при движении по п. 4, в котором вычислительный цикл процессора в процессе генерации статического пути движения продолжительнее, чем вычислительный цикл процессора в процессе вычисления значения управляющей команды.
9. Способ помощи при движении по п. 4, в котором вычислительный цикл процессора в процессе генерации динамического пути движения продолжительнее, чем вычислительный цикл процессора в процессе вычисления значения управляющей команды.
10. Способ помощи при движении по любому из пп. 1-9, содержащий этап, на котором:
корректируют в процессе генерации динамического пути движения статический путь движения посредством отражения расстояния движения рассматриваемого транспортного средства в течение периода, в течение которого генерируют динамический путь движения, в статическом пути движения.
11. Способ помощи при движении по любому из пп. 1-10, содержащий этапы, на которых:
оценивают местоположение рассматриваемого транспортного средства на карте на основе картографической информации и результатов обнаружения упомянутого датчика; и
выполняют в процессе коррекции статического пути движения процесс преобразования координат для преобразования координаты, задающей статический путь движения, из системы координат с центром в местоположении рассматриваемого транспортного средства в систему координат с центром в местоположении рассматриваемого транспортного средства на карте, и затем корректируют статический путь движения с использованием вычислительного цикла процессора в процессе генерации динамического пути движения.
12. Способ помощи при движении по любому из пп. 4, 8 и 9, содержащий этап, на котором:
корректируют в процессе вычисления значения управляющей команды целевой путь движения посредством отражения расстояния движения рассматриваемого транспортного средства в течение периода, в течение которого вычисляют значение управляющей команды, в целевом пути движения.
13. Способ помощи при движении по п. 12, содержащий этап, на котором:
оценивают местоположение рассматриваемого транспортного средства на карте на основе картографической информации и результатов обнаружения упомянутого датчика; и
выполняют в процессе коррекции целевого пути движения процесс преобразования координат для преобразования координаты, задающей целевой путь движения, из системы координат на основе местоположения рассматриваемого транспортного средства в систему координат на основе местоположения рассматриваемого транспортного средства на карте, и затем корректируют целевой путь движения с использованием вычислительного цикла процессора в процессе вычисления значения управляющей команды.
14. Способ помощи при движении по любому из пп. 1-13, содержащий этап, на котором:
генерируют путь движения с минимальным изменением кривизны в качестве статического пути движения.
15. Способ помощи при движении по любому из пп. 1-14, содержащий этап, на котором:
устанавливают длину пути статического пути движения, чтобы включал в себя по меньшей мере два поворота.
16. Способ помощи при движении по любому из пп. 1-14, содержащий этап, на котором:
устанавливают длину пути статического пути движения, чтобы включал в себя участок прямого пути на предварительно определенном расстоянии или более после поворота.
17. Способ помощи при движении по любому из пп. 1-16, содержащий этап, на котором:
устанавливают длину пути динамического пути движения таким образом, чтобы динамический путь движения находился в пределах диапазона обнаружения упомянутого датчика.
18. Способ помощи при движении по любому из пп. 1-17, содержащий этапы, на которых:
идентифицируют границы динамического пути движения в качестве первых границ динамического пути движения, при этом границы динамического пути движения являются разметкой поверхности дороги; и
идентифицируют границы динамического пути движения в качестве вторых границ динамического пути движения, при этом вторые границы динамического пути движения являются препятствиями, существующими вокруг рассматриваемого транспортного средства.
19. Способ помощи при движении по п. 18, содержащий этап, на котором:
генерируют динамический путь движения с использованием отношения уменьшения влияния вторых границ динамического пути движения на динамический путь движения, влияния первых границ динамического пути движения на динамический путь движения и влияния границ статического пути движения на динамический путь движения в таком порядке.
20. Устройство помощи при движении, содержащее процессор,
при этом процессор выполнен с возможностью:
получения от устройства для хранения картографической информации информации о границах статического пути движения между путем движения рассматриваемого транспортного средства и другим, чем упомянутый путь движения;
получения от датчика для обнаружения окружающей среды рассматриваемого транспортного средства информации о границах динамического пути движения, отличных от границ статического пути движения;
генерации на основе информации о границах статического пути движения статического пути движения, по которому упомянутое транспортное средство может двигаться;
генерации на основе информации о статическом пути движения и границах динамического пути движения динамического пути движения, который короче статического пути движения и соответствует окружающей среде; и
управления рассматриваемым транспортным средством для движения по целевому пути движения, включающему в себя статический путь движения и динамический путь движения,
при этом вычислительный цикл процессора в процессе генерации статического пути движения продолжительней, чем вычислительный цикл процессора в процессе генерации динамического пути движения.
| US2015300825A1, 22.10.2015 | |||
| WO2018066560A1, 12.04.2018 | |||
| WO2018073886A1, 26.04.2018. |

