1. Область техники, к которой относится изобретение
Изобретение относится к точному приборостроению и может быть использовано преимущественно в прецизионных инерциальных системах управления движением, например, самолетов, ракет, подводных лодок и других объектов.
Одной из важнейших задач, решаемых системами управления, является прецизионное измерение кажущегося ускорения объектов.
Для измерения ускорения предназначены акселерометры. Чтобы точно измерить ускорение, необходимо существенно снизить их погрешности, обусловленные внешними и внутренними возмущающими воздействиями.
Главным возмущающим воздействием для акселерометра является температура. Изменение температуры корпуса акселерометра происходит вследствие изменения окружающей температуры, а также вследствие собственного прогрева прибора после его включения. Из-за изменений температуры снижается точность акселерометра вследствие температурной погрешности его масштабного коэффициента. Это снижение очень велико, так как оно пропорционально измеряемому ускорению. В связи с этим усилия разработчиков акселерометров сосредоточены на уменьшении именно температурной погрешности масштабного коэффициента акселерометров.
2. Уровень техники
Рассмотрим аналоги предлагаемого изобретения.
2.1. Библиографические данные аналогов изобретения
[1] G01P 15/08, 15/13. Акселерометр компенсационного типа. Патент №2042955 по заявке №3158843/10 от 31.12.86 г. Авторы: Китанин Н.Г., Абаимов В.В., Гринь В.В., Шерстнев В.А.
Опубликован в бюл. №24 27.08.95 г.
[2] G01P 15/08, 15/13. Акселерометр компенсационного типа. Патент №2050549 по заявке №3186551/10 от 11.12.87 г. Авторы: Китанин Н.Г., Ивченко Н.Н., Гринь В.В., Рязанов А.А.
Опубликован в бюл. №35 20.12.95 г.
2.2. В акселерометре компенсационного типа по патенту РФ №2042955 [1] общими признаками с предлагаемым изобретением являются чувствительный элемент с обмоткой датчика силы, усилитель обратной связи. В этом акселерометре для достижения цели - увеличения точности компенсации температурного изменения масштабного коэффициента при значительных изменениях температуры окружающей среды - применен активный двухполюсник с отрицательным входным сопротивлением, вход которого шунтирует обмотку датчика силы.
Недостатком этого акселерометра является низкая точность компенсации вследствие наличия температурной погрешности масштабного коэффициента, пропорциональной квадрату температуры. Эта погрешность, как указано в описании изобретения к патенту [1], равна произведению квадратов коэффициента температурного изменения масштабного коэффициента и температуры акселерометра.
Наиболее близким к заявляемому изобретению аналогом (прототипом) является изобретение по патенту РФ №2050549 «Акселерометр компенсационного типа» [2]. В этом акселерометре общими признаками с предлагаемым изобретением являются чувствительный элемент с магнитоэлектрическим датчиком силы, датчиком положения и демпфирующей жидкостью, усилители датчика силы и датчика положения, масштабный резистор.
В данном изобретении так же, как и в изобретении по патенту [1], осуществляется компенсация линейной составляющей температурной погрешности масштабного коэффициента акселерометра, причем эта компенсация выполнена подключением преобразователя напряжения - ток параллельно обмотке датчика силы, а направление выходного тока преобразователя выбирают, исходя из знака температурного изменения масштабного коэффициента.
Этот акселерометр имеет невысокую точность измерений:
- из-за большой температурной погрешности, обусловленной наличием квадратичного члена в температурной зависимости масштабного коэффициента;
- из-за остаточных температурных погрешностей масштабного коэффициента, кроме погрешностей, пропорциональных температуре в первой и второй степени.
3. Раскрытие изобретения
3.1. Техническим результатом предлагаемого изобретения является повышение точности акселерометра за счет компенсации температурных погрешностей масштабного коэффициента.
Технический результат достигается совокупностью существенных признаков - введением в акселерометр терморезистора, двух аналого-цифровых преобразователей, источника тока, микроконтроллера, делителя напряжения, шунтирующего резистора и связей введенных элементов.
Сущность изобретения заключается в пространственном разделении температурного поля акселерометра на две области, в каждой из которых:
- температура измеряется отдельным датчиком;
- компенсация температурной погрешности масштабного коэффициента осуществляется по специальному (отличающемуся) алгоритму.
Пространственное разделение температурного поля позволяет осуществить раздельную компенсацию температурных погрешностей масштабного коэффициента, обусловленных датчиком силы и демпфирующей жидкостью, имеющих различные температуры в процессе измерения ускорения, что и обеспечивает повышение точности акселерометра.
3.2. Заявляемое изобретение направлено на решение следующих трех задач:
- формирование специальной схемы получения информации о температуре;
- компенсация погрешностей масштабного коэффициента, пропорциональных квадрату температуры;
- компенсация остаточных температурных погрешностей масштабного коэффициента, кроме погрешностей, пропорциональных температуре в первой и второй степени.
Существенные признаки, характеризующие предлагаемое изобретение и общие с прототипом [2]: чувствительный элемент с магнитоэлектрическим датчиком силы, датчиком положения и демпфирующей жидкостью, усилители датчика силы и датчика положения, масштабный резистор.
Существенные признаки, характеризующие предлагаемое изобретение и отличающиеся от прототипа [2]: введенные терморезистор, два аналого-цифровых преобразователя, источник тока, микроконтроллер, делитель напряжения, шунтирующий резистор и связи введенных элементов между собой и с элементами прототипа.
Для решения первой задачи - формирование специальной схемы получения информации о температуре, в результате введения в акселерометр новых элементов создано два новых канала измерения температуры.
Источником информации о температуре для первого канала является обмотка датчика силы (ДС). Датчик силы в изобретении имеет два функциональных назначения. Во-первых, как и в прототипе, по протекающему через обмотку ДС току судят о величине измеряемого ускорения. Во-вторых, в отличие от прототипа, измеряя сопротивление обмотки датчика силы, определяют температуру ДС, по которой решают вторую задачу: компенсация погрешностей масштабного коэффициента, пропорциональных второй степени температуры. Одновременно осуществляют и компенсацию погрешностей масштабного коэффициента, пропорциональных первой степени температуры.
Источником информации о температуре для второго канала является введенный терморезистор, измеряющий в основном температуру демпфирующей жидкости. Второй канал измерения температуры используется для решения третьей задачи - компенсация погрешностей, оставшихся после компенсации погрешностей, пропорциональных первой и второй степени температуры.
Для решения третьей задачи весь температурный диапазон акселерометра разделяют на r поддиапазонов (r больше 5) и в каждом поддиапазоне используют собственный коэффициент компенсации погрешности. В результате компенсируют не только погрешности масштабного коэффициента, пропорциональные температуре в степени выше второй, но и погрешности масштабного коэффициента, изменяющиеся по гармоническому (например, синусоидальному) закону температуры.
Решение трех вышеуказанных задач обеспечивает повышение точности акселерометра.
4. Краткое описание чертежей
Сущность изобретения поясняется чертежом, где представлена блок-схема предлагаемого устройства.
На чертеже цифрами обозначены:
1 - обмотка датчика силы;
2 - усилитель датчика силы;
3 - датчик положения;
4 - усилитель датчика положения;
5 - масштабный резистор;
6 - терморезистор;
7 - первый аналого-цифровой преобразователь;
8 - второй аналого-цифровой преобразователь;
9 - источник тока;
10 - микроконтроллер;
11 - первый резистор делителя напряжения;
12 - второй резистор делителя напряжения;
13 - шунтирующий резистор.
5. Осуществление изобретения
5.1. Как и в прототипе, предлагаемый акселерометр компенсационного типа содержит чувствительный элемент с датчиком силы 1 и датчиком положения 3, масштабный резистор 5, усилители датчика силы 2 и положения 4, первый вывод обмотки датчика силы 1 соединен с первым выводом масштабного резистора 5, второй вывод обмотки датчика силы 1 подключен к выходу усилителя датчика силы 2, выход датчика положения 3 соединен с входом усилителя датчика положения 4.
В отличие от прототипа, в предлагаемый акселерометр введены блоки от шестого до тринадцатого и связи блоков: выход усилителя датчика положения 4 соединен с первым входом микроконтроллера 10, первый вывод масштабного резистора 5 через первый аналого-цифровой преобразователь (АЦП) 7 подключен к второму входу микроконтроллера 10, выход источника тока 9 соединен с выводами терморезистора 6, шунтирующего резистора 13 и третьим входом микроконтроллера 10, первый резистор делителя напряжения 11 через второй резистор делителя напряжения 12 подключен к второму выводу обмотки датчика силы 1 и через второй аналого-цифровой преобразователь (АЦП) 8 к четвертому входу микроконтроллера 10, а выход микроконтроллера соединен с входом усилителя датчика силы 2.
5.2. Измерение ускорения с использованием предлагаемого акселерометра осуществляют следующим образом.
При воздействии на акселерометр ускорения gи возникает отклонение чувствительного элемента, не показанного на чертеже. Это отклонение фиксирует датчик положения 3, выходной сигнал которого после усиления в усилителе 4 поступает на первый вход микроконтроллера 10. Микроконтроллер формирует управляющий ШИМ-сигнал, поступающий с выхода микроконтроллера на вход усилителя 2. По этому ШИМ-сигналу усилитель 2 создает ток, поступающий с его выхода в обмотку датчика силы 1 и последовательно включенный с ним масштабный резистор 5. В результате датчик силы прикладывает к чувствительному элементу силу до обнуления отклонения чувствительного элемента (до обнуления выходного сигнала датчика положения).
Ток i, протекающий через датчик силы и масштабный резистор, пропорционален измеряемому ускорению gи:

где Км - масштабный коэффициент.
Измерение тока i осуществляют с помощью первого АЦП 7.
Напряжение UB1 на входе первого АЦП пропорционально току i:

где Rм - сопротивление масштабного резистора.
Масштабный резистор имеет малый температурный коэффициент сопротивления (ТКС).
С учетом (1), (2) выходной (цифровой) сигнал АЦП 7

где Кц - коэффициент пропорциональности.
Цифровой сигнал (3) поступает с выхода первого АЦП 7 на второй вход микроконтроллера.
Микроконтроллер корректирует значение U1 с учетом компенсации изменения масштабного коэффициента акселерометра в функции температуры. По скорректированному цифровому сигналу W с выхода микроконтроллера судят об ускорении gи.
5.3. Коррекцию температурной составляющей масштабного коэффициента акселерометра осуществляют следующим образом.
Одновременно с определением тока i, протекающего через обмотку датчика силы, измеряют напряжение UB2 на входе второго АЦП 8. Это напряжение можно выразить через ток i и параметры делителя напряжения (ДН) следующим образом:

где Rдс - сопротивление обмотки датчика силы;
R1, R2 - сопротивления первого и второго резисторов ДН соответственно.
Первый и второй резисторы ДН имеют малый ТКС, они приводят падение напряжения на нагрузке (Rдс+Rм) ко входу второго АЦП, обеспечивая максимальное напряжение не более допустимого.
Выходной (цифровой) сигнал АЦП 8

Микроконтроллер вычисляет отношение U2/U1 сигналов, поступивших на его четвертый и второй входы соответственно:

Сопротивление обмотки ДС зависит от температуры:

где Rдс0 - сопротивление обмотки датчика силы при номинальной температуре;
α - температурный коэффициент сопротивления обмотки датчика силы;
Θ - отклонение температуры обмотки датчика силы от номинальной.
Поэтому выражение (6) можно представить в виде:
U2/U1=(Rдс0+Rм)R1/Rм(R1+R2)+Rдс0R1α·Θ/Rм(R1+R2)
После калибровки акселерометра (в процессе его изготовления) составляющая (Rдс0+Rм)R1/Rм(R1+R2) учитывается и последующая температурная коррекция осуществляется с использованием отношения:

где Кт=Rдс0R1·α/Rм(R1+R2)
Таким образом, отношение сигналов U2/U1 пропорционально температуре Θ обмотки датчика силы, измеряемой относительно номинальной температуры.
Выходной (цифровой) сигнал микроконтроллера с учетом компенсации погрешности масштабного коэффициента, пропорциональной первой и второй степени температуры Θ, имеет вид:

где К=g/M0fCe - коэффициент учета систематической составляющей относительной погрешности масштабного коэффициента;
g - ускорение земного тяготения в месте испытаний акселерометра;
f - частота опроса первого и второго АЦП;
Се - цена единицы младшего разряда выходного кода;

М0 - расчетное значение выходного сигнала акселерометра при действии ускорения lg без учета систематической составляющей относительной погрешности масштабного коэффициента, причем второй индекс в обозначении выходных сигналов АЦП означает положение прибора - 1, 2. Положение прибора 1 - ось чувствительности прибора направлена вертикально вверх. Положение прибора 2 - ось чувствительности прибора направлена вертикально вниз;
K1, К2 - коэффициенты аппроксимирующего полинома.
5.4. Коэффициенты полинома К1, К2 определяют при изготовлении акселерометра из условия равенства масштабных коэффициентов акселерометра на краях и в центре рабочего температурного диапазона. Система уравнений для определения коэффициентов имеет вид:

где МВ, MC, МН - масштабный коэффициент акселерометра при максимальной, средней и низкой температурах соответственно.
С учетом выходного сигнала (9) систему уравнений (10) можно записать в виде:

Решение системы уравнений относительно К1, К2:
 ,
,

где a1=(UB1-UB12)-(UH11-UH12);
a2=(UB1-UB12)-(UC11-UC12);
в1=(UB21-UB22)-(UH21-UH22);
в2=(UB21-UB22)-(UC21-UC22);
 ;
;

UB11, UC11, UH11 - выходной сигнал первого АЦП при высокой, средней, низкой температуре соответственно в положении 1 прибора - измерительная ось направлена вертикально вверх;
UB12, UC12, UH12 - выходной сигнал первого АЦП при высокой, средней, низкой температуре соответственно в положении 2 прибора - измерительная ось направлена вертикально вниз;
UB21, UC21, UH21 - выходной сигнал второго АЦП при высокой, средней, низкой температуре соответственно в положении 1 прибора - измерительная ось направлена вертикально вверх;
UB22, UC22, UH22 - выходной сигнал второго АЦП при высокой, средней, низкой температуре соответственно в положении 2 прибора - измерительная ось направлена вертикально вниз.
Значения коэффициентов K1, K2 (при изготовлении акселерометра) записывают в оперативную память микроконтроллера.
5.5. Учет остаточной температурной погрешности масштабного коэффициента проводят следующим образом.
С выхода источника тока 9 постоянный ток поступает на терморезистор, сопротивление которого изменяется пропорционально текущей температуре Tt корпуса терморезистора. В результате на шунтирующем сопротивлении формируется напряжение, пропорциональное температуре Tt. Сигнал, соответствующий температуре Tt, поступает на 3 вход микроконтроллера.
Весь температурный диапазон акселерометра (при его изготовлении) разделяют на r поддиапазонов (r больше 5) и для каждого поддиапазона температуры от Ti до Ti+1 (i от 1 до r+1) определяют начальный поправочный коэффициент Mi (для температуры Ti) и конечный поправочный коэффициент Mi+1 (для температуры Tj+1).
С учетом линейной зависимости остаточной температурной погрешности в выбранном поддиапазоне от Ti до Ti+1 коэффициент учета остаточной температурной погрешности масштабного коэффициента имеет вид:

где Tt - текущее значение температуры, измеренное терморезистором;

 - стартовое (исходное) значение поправочного коэффициента (в момент включения прибора);
- стартовое (исходное) значение поправочного коэффициента (в момент включения прибора);
 - стартовый поправочный коэффициент для i-й температуры;
- стартовый поправочный коэффициент для i-й температуры;
 - стартовое значение i-го интервала температуры;
- стартовое значение i-го интервала температуры;
 - начальная температура в момент включения прибора.
- начальная температура в момент включения прибора.
Поправочный коэффициент Mi определяют по формулам:
 ,
,
 , δµ1=0, М1=0,
, δµ1=0, М1=0,

где µi,  - относительная погрешность масштабного коэффициента на i-й температуре Ti (i от 1 до r+1) до и после калибровки акселерометра соответственно. Коэффициенты Mi записывают в оперативную память микроконтроллера.
- относительная погрешность масштабного коэффициента на i-й температуре Ti (i от 1 до r+1) до и после калибровки акселерометра соответственно. Коэффициенты Mi записывают в оперативную память микроконтроллера.
5.6. Результирующий выходной (цифровой) сигнал акселерометра с учетом компенсации температурных погрешностей масштабного коэффициента, пропорциональных первой и второй степени температуры Θ, а также компенсации остаточных температурных погрешностей масштабного коэффициента с использованием температуры Tt имеет вид:

5.7. Для реализации предлагаемого акселерометра могут быть использованы полупроводниковый терморезистор ТР-1 и микроконтроллер ATMEGA 8535. В качестве аналого-цифрового преобразователя может быть применена микросхема AD7711. Для реализации резисторов делителя напряжения и шунтирующего резистора могут быть использованы резисторы С2-29 В.
5.8. Расчет эффективности изобретения
В акселерометре компенсационного типа по патенту РФ №2050549 [2] повышение точности достигается за счет снижения температурной погрешности, а конкретно уменьшением линейной составляющей температурной зависимости масштабного коэффициента, с помощью усилителя термокомпенсации.
Однако в реальных акселерометрах зависимость масштабного коэффициента от температуры существенно отличается от линейной.
Подсчитаем температурную погрешность масштабного коэффициента акселерометра-прототипа для зависимости масштабного коэффициента от температуры, описываемой, например, полиномом третьей степени:

где i - ток в цепи обратной связи акселерометра [2] без усилителя термокомпенсации;
i0 - ток в цепи обратной связи акселерометра [2] без усилителя термокомпенсации при номинальной температуре;
D1, D2, D3 - температурные коэффициенты изменения масштабного коэффициента акселерометра при температуре в первой, второй и третьей степени соответственно.
В соответствии с [2]

а суммарный ток в цепи обратной связи акселерометра с учетом тока усилителя термокомпенсации:

С учетом (19) выражение для температурной погрешности масштабного коэффициента акселерометра-прототипа можно записать в виде:

Тогда величина температурной погрешности при следующих реальных исходных данных: D1=4·10-41/°C, D2=6·10-71/(°С)2, D3=5·10-91/(°С)3, Θ=35°С - может составить:
δiк=-16·10-8·1225+6·10-7·1225-4·10-4·6·10-7·42875+5·10-9·42875-
-4·10-4·5·10-9·1500625=7,4·10-4.
Таким образом, при наличии нелинейной зависимости температурной погрешности масштабного коэффициента погрешность акселерометра-прототипа достигает значительных величин (порядка 7,4·10-4).
В предлагаемом акселерометре повышение точности, по сравнению с прототипом, достигается за счет снижения квадратичной и более высокого порядка составляющих температурной зависимости масштабного коэффициента.
Рассчитаем во сколько раз (по сравнению с прототипом) повышается точность предлагаемого акселерометра за счет снижения (компенсации) температурной составляющей масштабного коэффициента.
Представим зависимость тока в цепи обратной связи от температуры без компенсации в предлагаемом акселерометре в виде (18).
Выходная информация о токе в цепи обратной связи с компенсацией:

Учитывая, что  а отношение
а отношение  пропорционально сопротивлению обмотки датчика силы Rдс, выходную информацию можно представить в виде:
пропорционально сопротивлению обмотки датчика силы Rдс, выходную информацию можно представить в виде:

где
 ,
,


Учитывая зависимость (7) сопротивления обмотки датчика силы от температуры, можно записать выходную информацию акселерометра с компенсацией температурной погрешности в виде зависимости от температуры:

где
 ,
,
 ,
,
 .
.
Из (22) следует, что подбирая коэффициенты C1 и С2 (в процессе настройки акселерометра), можно компенсировать температурную погрешность масштабного коэффициента, пропорциональную первой и второй степени температуры.
Настройку акселерометра проводят (как показано в п.5.4) по условию равенства масштабных коэффициентов на краях и в средней точке рабочего температурного диапазона.
Пусть рабочий температурный диапазон акселерометра составляет 70°С - от минус 5°С до +65°С. В средней точке рабочего температурного диапазона (30°С) Θ=0, на верхней границе рабочего температурного диапазона отклонение температуры от среднего значения составит 35°С, на нижней - минус 35°С. Тогда можно записать систему двух уравнений:

Решение системы уравнений относительно C1, C2:

Температурная составляющая относительной погрешности масштабного коэффициента при компенсации линейного и квадратичного членов описывается выражением:

где Θ - отклонение текущего значения температуры прибора от температуры в средней точке рабочего температурного диапазона.
Значения остаточной температурной погрешности масштабного коэффициента δik при D1=4·10-4 1/°C, D2=6·10-71/(°С)2, D3=5·10-9 1/(°С)3, Θ=35°С представлены в таблице 1. При этом C1=-4,06·10-41/°C, С2=-4,35·10-71/(°С)2.
Из таблицы 1 следует, что остаточная температурная погрешность не превышает 7,63·10-5.
Таким образом, компенсация квадратичного члена температурной зависимости масштабного коэффициента повышает точность акселерометра в 7,4·10-4/7,63·10-5=9,7 раза.
Перейдем к рассмотрению эффективности изобретения в части компенсации остаточной температурной погрешности масштабного коэффициента δiк (таблица 1) с использованием измеренных терморезистором значений температуры Ti. Температура жидкости Ti, измеряемая терморезистором, может отличаться на величину от 1 до 5°С от температуры датчика силы Θi.
Для компенсации этой остаточной температурной погрешности масштабного коэффициента рабочий температурный диапазон акселерометра разбивают, например, на r=7 поддиапазонов (величиной от 8 до 12°С каждый), как показано в таблице 2.
В каждом из этих поддиапазонов температурное изменение масштабного коэффициента компенсируют со своим линейным коэффициентом. В этом случае температурная погрешность после компенсации остаточной температурной погрешности может быть определена (таблица 2) по формуле:

Эта температурная погрешность в соответствии с таблицей 2 не превышает по абсолютной величине 1,05·10-5.
Таким образом, по сравнению с прототипом, точность предлагаемого акселерометра по масштабному коэффициенту повышается дополнительно в 7,63·10-5/1,05·10-5=7,26 раза. В результате повышение точности в 9,7·7,26=70,4 раза по сравнению с прототипом позволяет создать акселерометр, обладающий высокой точностью в широком диапазоне температур.
| название | год | авторы | номер документа |
|---|---|---|---|
| Акселерометр компенсационного типа | 2020 |
|
RU2741277C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ЛИНЕЙНОСТИ МАСШТАБНОГО КОЭФФИЦИЕНТА МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА КОМПЕНСАЦИОННОГО ТИПА | 2016 |
|
RU2626071C1 |
| ТЕРМОМЕТРИЧЕСКАЯ КОСА И СПОСОБ ЕЕ КАЛИБРОВКИ | 2008 |
|
RU2389984C2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ДАВЛЕНИЯ ГАЗА | 2016 |
|
RU2665753C2 |
| ТЕРМОИНВАРИАНТНЫЙ ИЗМЕРИТЕЛЬ ЛИНЕЙНОГО УСКОРЕНИЯ | 2012 |
|
RU2528119C2 |
| СПОСОБ ТЕМПЕРАТУРНОЙ КОРРЕКТИРОВКИ ПЕРЕДАЮЩЕЙ ФУНКЦИИ ДАТЧИКА ФИЗИЧЕСКОЙ ВЕЛИЧИНЫ | 2003 |
|
RU2247325C2 |
| АВТОНОМНЫЙ ТЕПЛОСЧЕТЧИК И СПОСОБ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2694277C1 |
| ИЗМЕРИТЕЛЬ УГЛОВОГО ПОЛОЖЕНИЯ ИЗДЕЛИЯ | 2011 |
|
RU2491507C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ БЛОКА ОРИЕНТАЦИИ ИНТЕГРИРОВАННОЙ СИСТЕМЫ РЕЗЕРВНЫХ ПРИБОРОВ | 2013 |
|
RU2548056C1 |
| СВЕРХЧУВСТВИТЕЛЬНЫЙ ИНТЕЛЛЕКТУАЛЬНЫЙ МАГНИТОИМПЕДАНСНЫЙ ДАТЧИК С РАСШИРЕННЫМ ДИАПАЗОНОМ РАБОЧИХ ТЕМПЕРАТУР | 2014 |
|
RU2563600C1 |
Изобретение относится к точному приборостроению и может быть использовано преимущественно в прецизионных инерциальных системах управления движением, например, самолетов, ракет, подводных лодок и других объектов. Сущность изобретения заключается в пространственном разделении температурного поля акселерометра на две области, в каждой из которых температура измеряется отдельным датчиком, а компенсация температурной погрешности масштабного коэффициента осуществляется по специальному алгоритму. Пространственное разделение температурного поля позволяет осуществить раздельную компенсацию температурных погрешностей масштабного коэффициента, обусловленных в основном датчиком силы и демпфирующей жидкостью, имеющих различные температуры в процессе измерения ускорения, что и обеспечивает повышение точности акселерометра. 1 ил.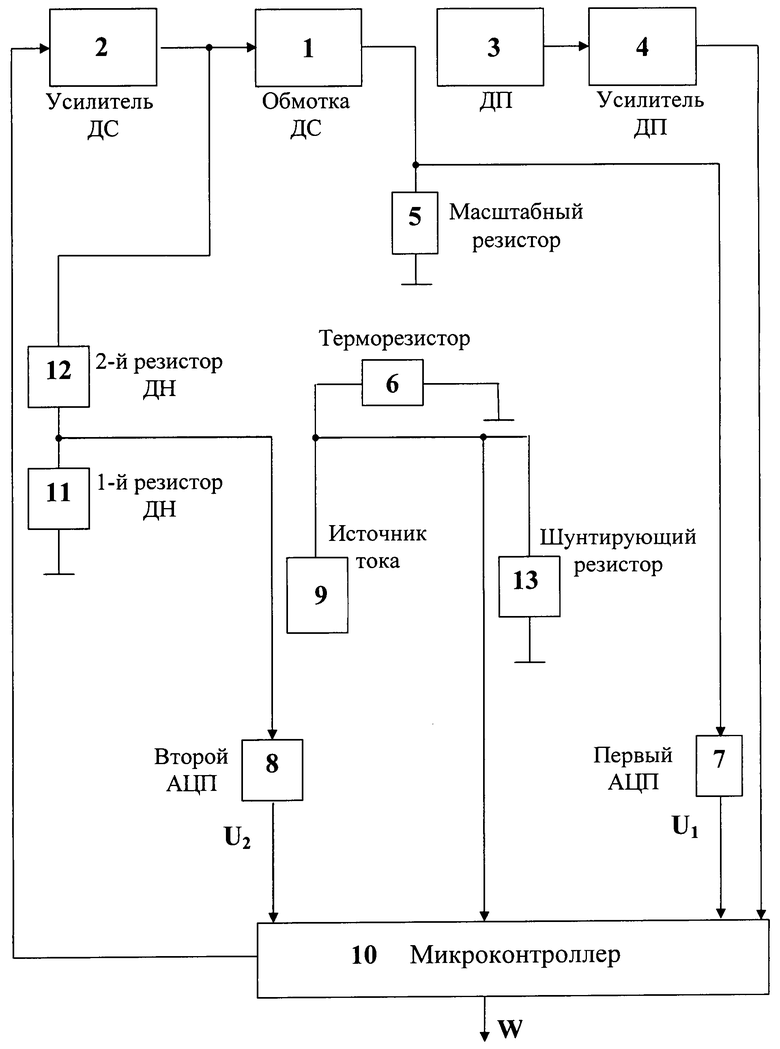
Акселерометр компенсационного типа, содержащий чувствительный элемент с датчиком силы и датчиком положения, масштабный резистор, усилители датчиков силы и положения, первый вывод обмотки датчика силы соединен с первым выводом масштабного резистора, второй вывод обмотки датчика силы подключен к выходу усилителя датчика силы, выход датчика положения соединен с входом усилителя датчика положения, отличающийся тем, что в него дополнительно введены терморезистор, первый и второй аналого-цифровые преобразователи, источник тока, микроконтроллер, первый и второй резисторы делителя напряжения, шунтирующий резистор, причем выход усилителя датчика положения соединен с первым входом микроконтроллера, первый вывод масштабного резистора через первый аналого-цифровой преобразователь подключен к второму входу микроконтроллера, выход источника тока соединен с выводами терморезистора, шунтирующего резистора и третьим входом микроконтроллера, первый резистор делителя напряжения через второй резистор делителя напряжения подключен к второму выводу обмотки датчика силы и через второй аналого-цифровой преобразователь к четвертому входу микроконтроллера, а выход микроконтроллера соединен с входом усилителя датчика силы.
| АКСЕЛЕРОМЕТР КОМПЕНСАЦИОННОГО ТИПА | 1987 |
|
RU2050549C1 |
| АКСЕЛЕРОМЕТР КОМПЕНСАЦИОННОГО ТИПА | 1986 |
|
RU2042955C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1999 |
|
RU2155965C1 |
| Компенсационный акселерометр | 1978 |
|
SU720416A1 |
| JP 2010002359 A, 07.01.2010 | |||
| US 3901086 A, 26.08.1975 | |||
| JP 5209893 A, 20.08.1993. | |||

