Изобретение относится к области инерциальных навигационных систем (ИНС) и может быть использовано для коррекции их ошибок, вызываемых дрейфом платформы трехосного гиростабилизатора (ТГС).
ИНС обладают важным свойством автономности, определение координат и скорости движущегося объекта осуществляется с использованием измерительной информации, получаемой только от чувствительных элементов, установленных на платформе ТГС (гироскопов, акселерометров и др.).
Одним из существенных недостатков ИНС является влияние инструментальных погрешностей измерителей на ошибки определения выходных навигационных параметров. Под действием начальных отклонений платформы ТГС и собственных дрейфов гироскопов возникают расходящиеся колебания платформы, приводящие к накапливающимся ошибкам ИНС [1].
Известны способы демпфирования колебаний платформы, основанные на использовании в ИНС корректирующих контуров и схем оптимальной фильтрации [2, 3]. Недостатки таких способов связанны с трудностью одновременного обеспечения условий демпфирования и невозмущаемости на движущемся объекте, а также с трудностями построения адекватной динамической модели системы и действующих на нее возмущений. Разработка высокоточных демпфированных ИНС в этих условиях требует усложнения конструкции и технологии производства системы.
В целом практическая реализация методов инерциальной навигации связана с трудностями обеспечения высокой точности и надежности работы при ограничениях на габаритно-массовые характеристики навигационной системы.
Отмеченные недостатки привели к тому, что в ИНС для улучшения их динамических и точностных свойств помимо инерциальной информации стали привлекать дополнительную измерительную информацию неинерциальной природы. Так, например, известен способ коррекции ошибок ИНС с помощью доплеровского измерителя скорости, позволяющего корректировать скорость объекта, определяемую ИНС, и уменьшить накапливающиеся ошибки ИНС в определении координат и параметров движения объекта [3]. Известны астро-инерциальные навигационные системы, в которых для получения внешней информации используются астровизиры, устанавливаемые на платформе ТГС.
Известны также более сложные комплексные навигационные системы, в которых ИНС объединяются с другими типами навигационных систем, например, комплексирование ИНС со спутниковыми навигационными системами [1, 3]. В комплексных системах появляется возможность скорректировать или существенно уменьшить накапливающиеся ошибки ИНС в определении координат и параметров движения объекта, в том числе и ошибки, обусловленные дрейфом платформы.
Несмотря на то, что при использовании в ИНС дополнительных измерителей и при построении комплексных навигационных систем достигается требуемая точность определения навигационных параметров, главными недостатками таких способов коррекции ошибок ИНС являются потеря свойств автономности, сложность конструкции навигационной системы и ее эксплуатации.
Целью настоящего изобретения является устранение отмеченных недостатков, повышение точности ИНС без привлечения дополнительных измерителей и внешних навигационных систем. Для этого в процессе движения объекта определяют точностные параметры дрейфа платформы ТГС на основе обработки только сигналов, снимаемых с датчиков углов гироскопов гиростабилизатора, и подают соответствующие моменты на датчики моментов гироскопов, компенсирующие дрейф платформы.
Учитывая сложность разработки алгоритмов автономного оценивания абсолютных значений дрейфа платформы ТГС, предлагается оценивать следующие параметры, которые за время движения объекта можно считать постоянными: скорости изменения возмущающих моментов на осях прецессии гироскопов и производные от скорости дрейфа платформы относительно их исходных значений, устанавливаемых в период начальной выставки. Влияние этих изменений на ошибки ИНС устраняется путем подачи соответствующих корректирующих моментов на датчики моментов гироскопов.
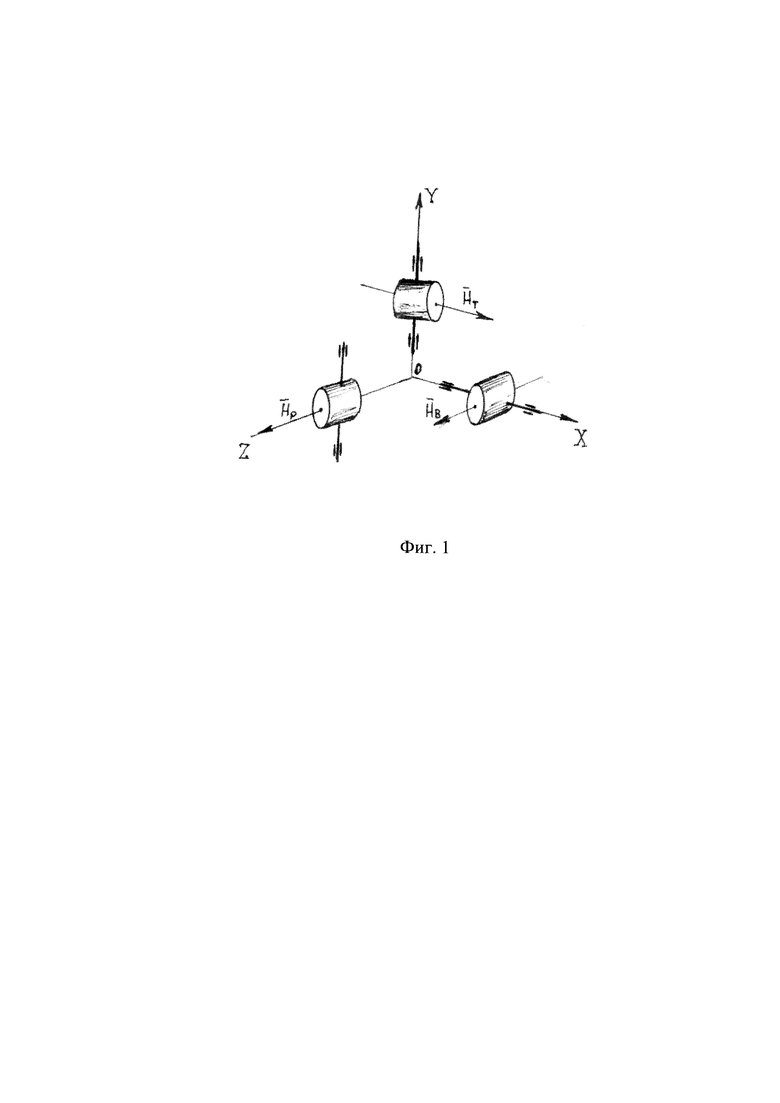
Для пояснения сущности предлагаемого способа рассмотрим уравнения движения платформы ТГС в инерциальном пространстве. Расположение двухстепенных гироскопов ИНС, связанных с осями XYZ платформы ТГС, показано на фиг 1. Здесь можно выделить две взаимосвязанные системы стабилизации платформы - относительно осей X (гироскоп «Р») и Y (гироскоп «В»), которые можно рассматривать независимо от системы относительно оси Z. Для удобства вывода алгоритма исходные уравнения движения гиростабилизатора относительно осей стабилизации и осей прецессии целесообразно представить в следующем виде [4, 5]:


где обозначено:


ωP, ωB - скорости дрейфа платформы;
βP, βB - углы поворота гироскопов;
IX, IY - моменты инерции платформы относительно осей X и Y;
IP, IB - моменты инерции гироскопов «Р» и «В»;
НР, НВ - кинетические моменты гироскопов;
dP, dB - коэффициенты демпфирования;
СР, СВ - коэффициенты жесткости;
MX, MY - возмущающие моменты относительно осей стабилизации;
ΔМp, ΔМв - неучтенные возмущающие моменты относительно осей прецессии;
МСХ, MCY - моменты, создаваемые двигателями стабилизации;
MY - управляющие моменты, вырабатываемые навигационной системой;
ΔМαр, ΔМαв - моменты, некомпенсированные системой стабилизации («результирующие» моменты):
ΔМαр=MX+MCX, ΔМαв=MY+MCY.
В дальнейшем при выводе алгоритма с целью упрощения управляющие моменты MY не учитываются, поскольку это не меняет сущности предлагаемого способа. Эти моменты вычисляются в системе навигации на основе показаний акселерометров, являются известными функциями времени, и могут быть непосредственно учтены при построении реальных алгоритмов оценивания.
Для нахождения параметров изменений возмущающих моментов рассмотрим уравнения (1), (2) в установившемся (прецессионном) движении, полагая в них значения производных  и
и  постоянными. С целью упрощения задачи будем полагать, что возникающие при движении моменты относительно осей стабилизации скомпенсированы. Тогда для производных «результирующих» моментов имеем соотношение:
постоянными. С целью упрощения задачи будем полагать, что возникающие при движении моменты относительно осей стабилизации скомпенсированы. Тогда для производных «результирующих» моментов имеем соотношение:
После дифференцирования левых и правых частей уравнений (1) и (2) получим соотношения между искомыми параметрами:


Исключая из них  можно найти общий алгоритм оценивания скоростей нарастания возмущающих моментов по осям прецессии гироскопов:
можно найти общий алгоритм оценивания скоростей нарастания возмущающих моментов по осям прецессии гироскопов:

Отсюда можно получить формулы для составляющих параметров  и
и  относящихся к гироскопам «Р» и «В».
относящихся к гироскопам «Р» и «В».
Аналогично из (3) и (4), учитывая (5), можно найти алгоритм для оценивания составляющих  и
и  скорости изменения дрейфа платформы.
скорости изменения дрейфа платформы.
Входящие в алгоритм (5) элементы векторов 
 и
и  зависят только от параметров углового движения гироскопов
зависят только от параметров углового движения гироскопов  Таким образом, на основе обработки информации, получаемой только с датчиков углов гироскопов «Р» и «В», можно оценить скорости изменения возмущающих моментов на осях прецессии гироскопов и производные от скорости дрейфа платформы относительно их исходных значений установленных при начальной выставке, что позволит осуществить соответствующую автономную коррекцию ошибок ИНС в процессе движения объекта путем подачи соответствующих компенсирующих моментов на датчики моментов гироскопов, устраняя тем самым дрейф платформы трехосного гиростабилизатора.
Таким образом, на основе обработки информации, получаемой только с датчиков углов гироскопов «Р» и «В», можно оценить скорости изменения возмущающих моментов на осях прецессии гироскопов и производные от скорости дрейфа платформы относительно их исходных значений установленных при начальной выставке, что позволит осуществить соответствующую автономную коррекцию ошибок ИНС в процессе движения объекта путем подачи соответствующих компенсирующих моментов на датчики моментов гироскопов, устраняя тем самым дрейф платформы трехосного гиростабилизатора.
Источники информации
1. Развитие механики гироскопических и инерциальных систем/Под ред. В.Д. Андреева, Е.А. Девятина, А.Т. Григорьяна и др. - М.: Наука, 1973. - с. 322, 333-341.
2. Броксмейер Ч.Ф. Системы инерциальной навигации. - Л.: Судостроение, 1967. - с. 193-234.
3. Ривкин С.С., Ивановский Р.И., Костров А.В. Статистическая оптимизация навигационных систем. - Л.: Судостроение, 1976. - с. 24-25, 124-129, 229-230, 251-256.
4. Камкин Е.Ф. Автономный редуцированный идентификатор дрейфа гироплатформы. Авиакосмическое приборостроение. №2. - М: Изд-во «Научтехлитиздат», 2006 г. - с. 4-8.
5. Камкин Е.Ф. О применении идентификаторов состояния для оценивания уходов гироплатформы на подвижном объекте / Труды «ФГУП НПЦ» «Системы и приборы управления» №3. - М: Изд-во МГТУ им. Н.Э. Баумана, 2013. - с. 43-50.
Изобретение относится к области инерциальных навигационных систем (ИНС) и может быть использовано для коррекции ошибок данных систем. Технический результат - повышение точности инерциальных навигационных систем без использования внешних измерительных устройств. Предложенный способ коррекции ошибок ИНС заключается в том, что выделяют две взаимосвязанные системы стабилизации платформы относительно осей X и Y, определяют значения углов поворота гироскопов, обеспечивающих стабилизацию платформы относительно осей X и Y при помощи датчиков углов данных гироскопов, на основании указанных значений углов определяют моменты, не скомпенсированные системой стабилизации относительно осей X и Y, а управляющие моменты MY, вырабатываемые навигационной системой и являющиеся известными функциями времени, определяют на основе показаний акселерометров, исходя из условия постоянства производных моментов, не скомпенсированных системой стабилизации, и скорости изменения дрейфа платформы определяют скорости нарастания возмущающих моментов по осям прецессии гироскопов, на основании которых определяют составляющие скорости изменения дрейфа платформы относительно их исходных значений, установленных при начальной выставке осей Х и Y. Затем осуществляют автономную коррекцию ошибок ИНС в процессе движения объекта путем подачи компенсирующих моментов на датчики моментов гироскопов. 1 ил.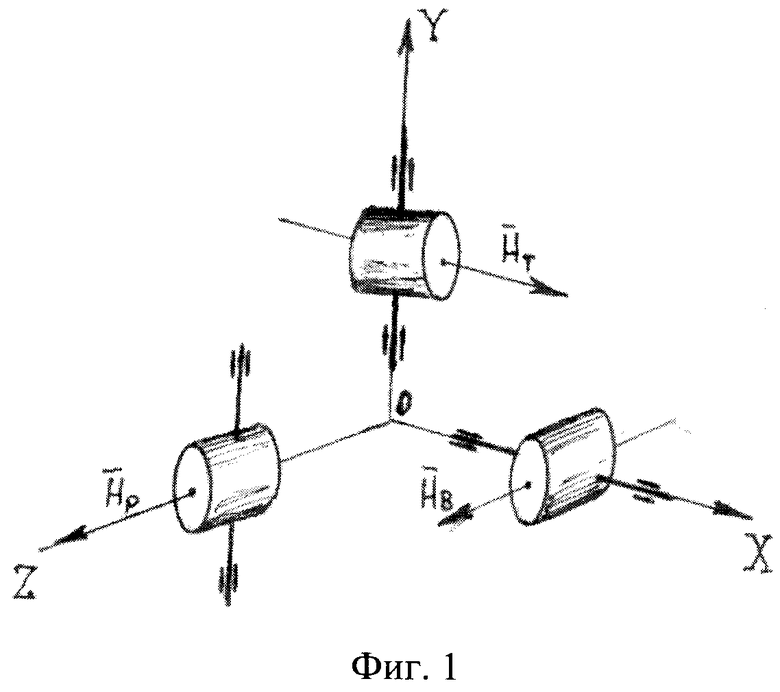
Способ коррекции ошибок инерциальных навигационных систем (ИНС), заключающийся в том, что выделяют две взаимосвязанные системы стабилизации платформы относительно осей X и Y, определяют значения углов поворота гироскопов, обеспечивающих стабилизацию платформы относительно осей X и Y при помощи датчиков углов этих гироскопов, на основании указанных значений углов определяют моменты, не скомпенсированные системой стабилизации относительно осей X и Y, а управляющие моменты MY, вырабатываемые навигационной системой и являющиеся известными функциями времени, определяют на основе показаний акселерометров, исходя из условия постоянства значений производных моментов, не скомпенсированных системой стабилизации, и скорости изменения дрейфа платформы определяют скорости нарастания возмущающих моментов по осям прецессии гироскопов, на основании которых определяют скорости изменения дрейфа платформы относительно их исходных значений, установленных при начальной выставке по осям Х и Y, и осуществляют автономную коррекцию ошибок ИНС в процессе движения объекта путем подачи компенсирующих моментов на датчики моментов гироскопов.
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ УПРАВЛЯЕМЫХ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339002C1 |
| RU 2060463 C1, 20.05.1996 | |||
| СПОСОБ ДЕМПФИРОВАНИЯ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ | 2006 |
|
RU2315956C1 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2169903C1 |
| КУРСОВЕРТИКАЛЬ | 1994 |
|
RU2087865C1 |
| СПОСОБ КОРРЕКЦИИ ДРЕЙФА ГИРОСКОПА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2572501C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2646954C2 |
| CN 106767806 A, 31.05.2017. | |||

