Изобретение относится к гироскопической технике, а именно к способам коррекции дрейфа гироскопа с ротором на сферической шарикоподшипниковой опоре.
Известен способ [1] динамической балансировки гироскопа, содержащего статор, ротор на сферической шарикоподшипниковой опоре и датчик угла, включающий вращение ротора, измерение дисбаланса и его коррекцию.
Известен способ [2] коррекции дрейфа гироскопа с синхронным гистерезисным электродвигателем, содержащего статор, ротор на сферической шарикоподшипниковой опоре и датчик угла, включающий вращение ротора, измерение дрейфа и его коррекцию путем удаления ферромагнитной массы статора в месте, соответствующем направлению дрейфа.
Известно устройство для определения дрейфа гироскопа с синхронным гистерезисным электродвигателем [2], содержащего статор, ротор на сферической шарикоподшипниковой опоре и датчик угла, включающее соединенные последовательно задающий генератор и инвертор, выход которого подключен к электродвигателю гироскопа, измеритель, подключенный к датчику угла, конденсатор, подключенный параллельно питающей шине инвертора, переключатель между генератором и инвертором, синхронно связанный с другим переключателем, включенным в разрыв шины питания инвертора.
Известно устройство для управления двухфазным бесколлекторным электродвигателем постоянного тока [3], содержащим ротор с постоянными магнитами и статор с несколькими обмотками, включающее микроконтроллер, аналого-цифровой преобразователь и широтно-импульсный модулятор.
Общим недостатком приведенных способов и устройств является отсутствие коррекции дрейфа гироскопа без его разборки.
Целью изобретения является обеспечение коррекции дрейфа непосредственно в процессе его измерения, без разборки гироскопа.
Технический результат заключается в снижении трудоемкости изготовления и повышении точности гироскопического прибора.
В способе коррекции дрейфа гироскопа с двухфазным бесколлекторным электродвигателем постоянного тока, содержащего статор, ротор на сферической шарикоподшипниковой опоре, датчики угла и датчики момента, включающем вращение ротора, измерение дрейфа и его коррекцию, согласно изобретению коррекцию дрейфа проводят непосредственно в процессе его измерения путем компенсации постоянной составляющей электрического тока в фазных обмотках статора двигателя гироскопа.
К существенным отличиям предложенного способа относится то, что коррекцию дрейфа проводят непосредственно в процессе его измерения, без разборки гироскопа.
В устройство для коррекции дрейфа гироскопа с двухфазным бесколлекторным электродвигателем постоянного тока, содержащего статор, ротор на сферической шарикоподшипниковой опоре, датчики угла и датчики момента, включающее два датчика положения ротора, стабилизатор частоты вращения ротора, два усилителя мощности, выход каждого из которых подключен к фазным обмоткам статора электродвигателя гироскопа, измеритель, подключенный к датчику угла гироскопа, согласно изобретению в разрыв цепей «стабилизатор частоты вращения - усилитель мощности» дополнительно включают сумматоры, на дополнительный вход которых поступают сигналы с регулировочных резисторов, подключенных к стабилизированным источникам питания, позволяющие компенсировать постоянные составляющие электрических токов в фазных обмотках статора двигателя гироскопа.
К существенным отличиям предложенного устройства относится наличие в нем сумматоров и регулировочных резисторов, сигналы с которых позволяют компенсировать постоянные составляющие электрических токов в фазных обмотках статора.
Предложенный способ реализуют следующим образом.
Включают гироскоп, используя источник питания бесколлекторного двигателя постоянного тока со схемой управления и стабилизации частоты вращения ротора, содержащей два датчика положения, стабилизатор частоты вращения ротора, два сумматора с регулировочными резисторами и два усилителя мощности. После полного разгона ротора гиромотора измеряют на датчике угла величину дрейфа гироскопа и одновременно проводят его коррекцию путем подачи с помощью регулировочных резисторов постоянных напряжений на вход усилителей мощности.
Изобретение поясняется чертежами.
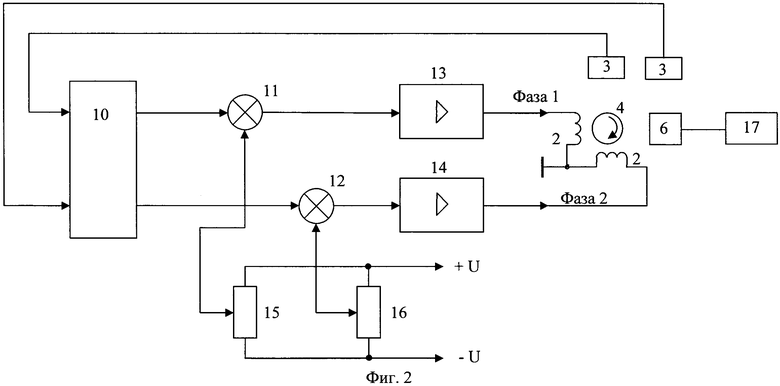
На фиг. 1 представлен чертеж гироскопа с двухфазным бесколлекторным двигателем постоянного тока.
На фиг. 2 показана структурная схема устройства для определения и коррекции дрейфа гироскопа в процессе его измерения.
На фиг. 1 представлен статор 1 с обмотками 2 и датчиками 3 положения, ротор 4, сферическая шарикоподшипниковая опора 5, датчики 6 угла и датчики 7 момента. В роторе 4 выполнена кольцевая полость, в которой находятся кольцевой двухполюсный магнит 8 и кольцевой магнитопровод 9. Создание вращающего момента ротора основано на правиле Флеминга.
На проводник с током, расположенный в магнитном поле, действует сила. Направление силы определяется правилом левой руки, а ее значение равно:

где
Ζ - количество проводников;
В - магнитная индукция в воздушном зазоре;
I - электрический ток;
L - эффективная длина проводника.
На фиг. 2 представлены датчики 3 положения ротора 4, устройство 10 стабилизации частоты вращения ротора 4, сумматоры 11, 12, усилители мощности 13, 14, регулировочные резисторы 15, 16, датчики 6 угла и измеритель 17 дрейфа.
Особенностью гироскопа с ротором на сферической шарикоподшипниковой опоре и двухфазным бесколлекторным двигателем является наличие дрейфа от вращающего момента ротора, величина которого зависит от распределения электрического тока I формулы (1) в фазных обмотках статора.
Способ коррекции дрейфа гироскопа осуществляют следующим образом.
В схему фиг. 2 введены сумматоры 11, 12 и регулировочные резисторы 15, 16. Путем подачи постоянных напряжений на вход усилителей 13, 14 мощности проводится перераспределение электрического тока в фазах 1, 2. На датчике 6 угла измерителем 17 измеряют дрейф гироскопов, вращением резисторов 15, 16 проводят его коррекцию.
Работа устройства для осуществления коррекции дрейфа осуществляется следующим образом.
При подаче питания сигналы прямоугольной формы с датчиков 3 положения поступают на устройство 10 стабилизации частоты вращения ротора, которое сравнивает частоту прямоугольных импульсов с датчиков положения с образцовой и формирует выходные прямоугольные напряжения с изменяемой амплитудой. Далее прямоугольные напряжения поступают на вход сумматоров 11, 12, на другой вход которых поступают постоянные напряжения с регулировочных резисторов 15, 16, выход сумматоров подключен к усилителям 13, 14 мощности, формирующим необходимые напряжения и токи для управления обмотками 2 двухфазного бесколлекторного двигателя с ротором 4. Для обеспечения стабильности вышеуказанных напряжений резисторы 15, 16 подключают к стабилизированным источникам питания +U и -U. При этом на датчике 6 угла измерителем 17 измеряют дрейф гироскопа. Коррекция дрейфа гироскопа проводится вращением регулировочных резисторов 15, 16.
Данная схема позволяет компенсировать не только дрейф, вызванный вращающим моментом ротора, но и дрейф, обусловленный другими факторами (трение, аэродинамика и т.д.).
Предложенные изобретения использованы в макетных образцах гироскопа на шаровом подвесе с двухфазным бесколлекторным двигателем и показали значительное упрощение и сокращение регулировки дрейфа гироскопа.
Источники информации
1. Патент РФ №2334205, МПК G01M 1/34, 2007 г.
2. Патент РФ №2410658, МПК G01M 1/34, G01C 25/00, 2009 г.
3. Информационный материал «AVR440: Управление двухфазным бесколлекторным электродвигателем постоянного тока без датчиков», (стр. 1-10).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления двигателем и коррекции дрейфа гироскопа | 2021 |
|
RU2789116C1 |
| ГИРОСКОП | 2010 |
|
RU2446382C1 |
| СПОСОБ КОРРЕКЦИИ ДРЕЙФА ГИРОСКОПА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2410658C1 |
| АЛГОРИТМ ГАРАНТИРОВАННОГО ТРОГАНИЯ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ МОДУЛЯЦИОННОГО ГИРОСКОПА | 2008 |
|
RU2391629C2 |
| Двухканальный датчик угловой скорости | 2019 |
|
RU2725880C1 |
| ГИРОСКОП (ВАРИАНТЫ) | 2011 |
|
RU2460040C1 |
| ГИРОСКОП | 2019 |
|
RU2728733C1 |
| СПОСОБ НАСТРОЙКИ ВЕНТИЛЬНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2014 |
|
RU2556884C1 |
| ГИРОСКОП (ВАРИАНТЫ) | 2005 |
|
RU2308680C2 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
Изобретение относится к гироскопической технике, а именно к способам коррекции дрейфа гироскопа с ротором на сферической шарикоподшипниковой опоре. Сущность изобретения заключается в том, что способ коррекции дрейфа гироскопа с двухфазным бесколлекторным двигателем постоянного тока, содержащего статор, ротор на сферической шарикоподшипниковой опоре, датчики угла и датчики момента, включает этапы вращения ротора, измерения дрейфа и его коррекцию, при этом коррекцию дрейфа проводят непосредственно в процессе его измерения путем компенсации постоянной составляющей электрического тока в разных обмотках статора. Устройство для коррекции дрейфа гироскопа с двухфазным бесколлекторным двигателем постоянного тока содержит сумматоры и регулировочные резисторы, сигналы с которых позволяют компенсировать постоянные составляющие электрических токов в фазных обмотках статора. Технический результат - снижение трудоемкости изготовления и повышение точности гироскопического прибора. 2 н.п. ф-лы, 2 ил.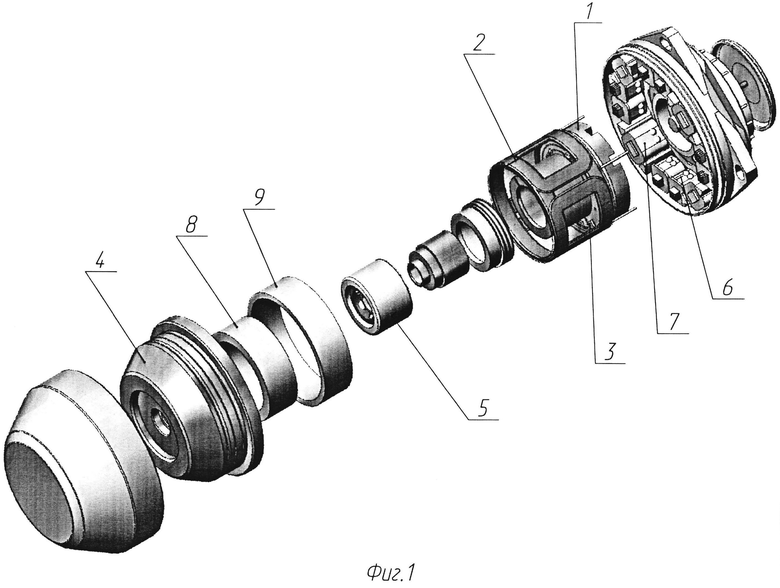
1. Способ коррекции дрейфа гироскопа с двухфазным бесколлекторным двигателем постоянного тока, содержащего статор, ротор на сферической шарикоподшипниковой опоре, датчики угла и датчики момента, включающий вращение ротора, измерение дрейфа и его коррекцию, отличающийся тем, что коррекцию дрейфа проводят непосредственно в процессе его измерения путем компенсации постоянной составляющей электрического тока в разных обмотках статора.
2. Устройство для коррекции дрейфа гироскопа с двухфазным бесколлекторным двигателем постоянного тока, содержащего статор, ротор на сферической шарикоподшипниковой опоре, датчики угла и датчики момента, включающее два датчика положения, стабилизатор частоты вращения, два усилителя мощности, выход каждого из которых подключен к фазным обмоткам статора двигателя гироскопа, измеритель, подключенный к датчику угла гироскопа, отличающееся тем, что в разрыв цепей «стабилизатор частоты вращения - усилитель мощности» включены сумматоры, на дополнительный вход которых поступают сигналы с регулировочных резисторов, подключенные к стабилизированным источникам питания.
| СПОСОБ КОРРЕКЦИИ ДРЕЙФА ГИРОСКОПА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2410658C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ НА ПОДВИЖНОМ ОСНОВАНИИ | 2002 |
|
RU2225024C1 |
| Развертывающий операционный усилитель | 1980 |
|
SU924719A1 |
| Способ центробежного литья | 1978 |
|
SU789223A1 |

