Изобретение относится к области гидроакустики, а именно к распределенным системам подводного наблюдения (РСПН).
В настоящее время актуальной является задача создания систем подводного наблюдения в районах большой площади, причем как в прибрежных районах, так и в открытом море. Ранее использовавшиеся для этой цели активные либо пассивные (например, «SOSUS» США) комплексы с широко-апертурными антеннами площадью до 1000 м2 оказались недостаточно эффективными ввиду их подверженности преднамеренному противодействию со стороны противника, а также высокой стоимости. В последние десятилетия на смену идеологии больших гидролокационных комплексов пришла идеология РСПН [1-9].
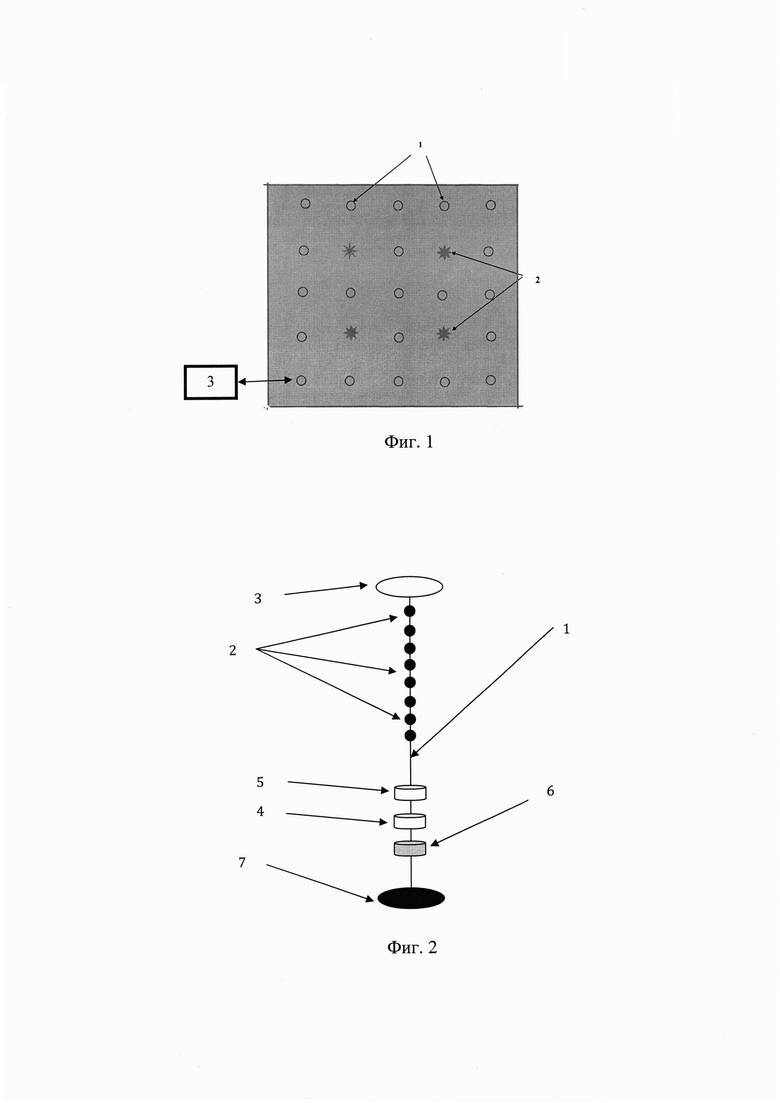
В качестве прототипа выберем РСПН, описанную в [9]. Ее структура пояснена на фиг. 1. РСПН включает объединенные сетевой гидроакустической связью (СГС) пункт управления (ПУ) РСПН 3, как правило, располагающийся на берегу, а также пространственно разнесенные автономные пассивные 1 и/или активные 2 средства подводного наблюдения (СПН).
В пассивном режиме работы РСПН пассивные СПН обеспечивают непрерывное наблюдение за подводной обстановкой путем анализа шумов, поступающих на вход гидроакустической антенны СПН. При обнаружении подводного объекта заданного класса СПН по СГС передает информацию об обнаружении на ПУ РСПН. На ПУ осуществляется комплексирование информации от всех пассивных СПН, чем достигается повышение вероятности обнаружения и классификации подводных объектов, а также сопровождение их при движении по району, контролируемому РСПН.
В активном режиме работы РСПН процесс наблюдения за подводной обстановкой в целом аналогичен, за исключением того, что активные СПН излучают зондирующие сигналы, а пассивные СПН наблюдают за подводной обстановкой путем обнаружения и анализа поступающих на вход гидроакустической антенны СПН эхосигналов, прямых и отраженных от подводных объектов.
Ввиду необходимости установки СПН на якоря, РСПН развертываются только в мелководных морях с глубинами до 500 м.
Достоинствами РСПН являются:
- возможность вести наблюдение за подводной обстановкой в районе большой площади, в том числе за счет увеличения количества пассивных и активных СПН;
- высокая устойчивость к преднамеренному противодействию.
Эффективность функционирования РСПН существенно зависит от ее адаптации к текущим гидроакустическим условиям, точнее к вертикальному распределению скорости звука (ВРСЗ) в районе установки РСПН. Адаптация РСПН может быть реализована путем учета текущего ВРСЗ:
- при выборе заглубления антенн пассивных и активных СПН;
- при выборе параметров излучаемых зондирующих сигналов в активных СПН;
- при настройке алгоритмов обнаружения, классификации и определения координат подводных объектов в пассивных СПН;
- при комплексировании в ПУ информации, поступающей от пассивных СПН.
Недостатком РСПН-прототипа является отсутствие измерения ВРСЗ, что приводит к снижению эффективности функционирования РСПН вследствие отсутствия адаптации к текущему ВРСЗ.
Решаемая техническая проблема - совершенствование структуры и эффективности функционирования РСПН.
Технический результат - повышение дальности обнаружения и точности определения координат и параметров движения малошумных подводных объектов.
Указанный технический результат достигается тем, что для обеспечения измерения, последующего формирования и учета текущего ВРСЗ в состав РСПН дополнительно включен стационарный измеритель ВРСЗ (фиг. 2) в виде заякоренного вертикального кабель-троса 1, на котором размещены:
- 2 - комплект расположенных равномерно вдоль кабель-троса с интервалом в 5-10 м комбинированных датчиков, включающих датчики температуры, электропроводности и давления воды;
- 3 - плавучесть, позволяющая поддерживать измеритель ВРСЗ в вертикальном положении;
- 4 - модем СГС, обеспечивающий передачу на ПУ результатов измерения ВРСЗ и прием команд от ПУ;
- 5 - блок управления функционированием измерителя ВРСЗ (далее БУ);
- 6 - аккумуляторная батарея;
- 7 - якорное устройство.
Функционирование измерителя ВРСЗ в составе РСПН осуществляется следующим образом. Измеритель ВРСЗ устанавливается в центре района, контролируемого РСПН. Если площадь контролируемого района превышает 40 тыс. км2, то в районе устанавливается несколько измерителей ВРСЗ с расчетом, чтобы расстояние между ними не превышало 40 км.
Работа измерителя ВРСЗ начинается с прихода на модем СГС сигнала от ПУ, содержащего команду "Начать измерение ВРСЗ". По этой команде БУ с периодом в 1 час синхронно выдает всем комбинированным датчикам команду на измерение температуры, электропроводности и давления воды в месте своего расположения. Результаты измерений каждый комбинированный датчик выдает в БУ, в котором для каждого комбинированного датчика в соответствии с [10] вычисляется скорость звука в воде. Поскольку заглубление каждого комбинированного датчика известно, в БУ формируется таблица зависимости скорости звука от заглубления датчика. Данная таблица по команде БУ в закодированном виде, содержащем также условный номер измерителя ВРСЗ (если их в районе установлено несколько), с использованием модема СПС передается на ПУ. На ПУ с помощью специального алгоритма проверяется, произошло ли существенное изменение ВРСЗ в сравнении с тем, которое используется в текущее время для адаптации функционирования РСПН. Если существенного изменения не произошло то, поступивший замер ВРСЗ просто помещается в память вычислителя для накопления гидрологических данных о контролируемом районе. В противном случае блок управления ПУ рассчитывает оптимальные для данного ВРСЗ: заглубление антенн СПН, параметры излучаемых зондирующих сигналов в активных СПН, параметры алгоритмов обнаружения, классификации и определения координат подводных объектов в пассивных СПН, параметры алгоритмов комплексирования данных, поступающих на ПУ от пассивных СПН.
Эффективность предлагаемого изобретения была подтверждена разработкой и испытаниями макета комбинированного датчика, а также имитационным моделированием.
Испытания макета комбинированного датчика показали, что предельная ошибка вычисления скорости звука в морской воде по измерениям температуры, электропроводности и давления согласно [10] не превышает 0,5 м/с, что вполне достаточно для решения рассматриваемых задач.
Проведенное имитационное моделирование показало, что учет ВРСЗ позволяет повысить дальность обнаружения малошумных подводных объектов до 1,5 раз, а точность определения их координат и параметров движения до 50%.
Таким образом, заявленный технический результат изобретения - повышение дальности обнаружения и точности определения координат и параметров движения малошумных подводных объектов - можно считать достигнутым.
Источники информации:
1. Коваленко В.В., Корчак В.Ю., Чулков В.Л. Концепция и ключевые технологии подводного наблюдения в условиях сетецентрических войн // Фундаментальная и прикладная гидрофизика, 2011, том 4, №3, стр. 49-64.
2. Пешехонов В.Г., Брага Ю.А., Машошин А.И. Сетецентрический подход к решению проблемы освещения подводной обстановки в Арктике // Известия ЮФУ. Технические науки, 2012, №3, С. 219-227.
3. Коваленко В.В., Корчак В.Ю., Хилько А.И., Чулков В.Л. Требования к сетецентрическим системам подводного наблюдения // Фундаментальная и прикладная гидрофизика, 2014, Т 7, №2, С. 22-26.
4. Машошин А.И. Концепция создания интегрированных сетевых систем подводного наблюдения // Сборник материалов Девятой научно-практической конференции "Перспективные системы и задачи управления, Таганрог, 7-11 апреля 2014, с. 7-16.
5. Михнюк А.Н. Методы повышения эффективности функционирования мультистатической системы подводного наблюдения. Дис. … канд. физ.-мат. наук. М.: Научный центр волновых исследований, 2018.
6. Патент РФ 2364888.
7. Николаев М. Найти невидимку: системы обнаружения субмарин // http://www.popmech.ru/article/5562-nayti-nevidimku.
8. Пичугин С. Состояние и перспективы развития систем гидроакустического наблюдения ВМС США // Зарубежное военное обозрение, 2010, №5 и №6.
9. Машошин А.И., Шафранюк А.В. Алгоритмы управления распределенной системой подводного наблюдения // Морские информационно-управляющие системы, 2016, №2 (10), с. 12-19.
Ю. Микушин И.И., Серавин Г.Н. Методы и средства измерения скорости звука в море // СПб.: Судостроение, 2012. 224 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мультистатическая система подводного наблюдения | 2019 |
|
RU2713005C1 |
| Мобильная распределённая система подводного наблюдения | 2021 |
|
RU2767384C1 |
| Корабль освещения подводной обстановки | 2018 |
|
RU2693767C1 |
| Способ достроения измеренной от поверхности моря части профиля вертикального распределения скорости звука до дна | 2021 |
|
RU2769550C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2017 |
|
RU2681476C2 |
| Способ определения дистанции до надводного корабля в условиях дальних зон акустической освещённости | 2022 |
|
RU2782619C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2555192C1 |
| РЕАКТИВНАЯ СИСТЕМА ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2012 |
|
RU2510353C2 |
| ЗАЯКОРЕННАЯ ПРОФИЛИРУЮЩАЯ ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2014 |
|
RU2545159C1 |
| Система интеллектуальной поддержки оператора центра сбора и обработки информации сетецентрической системы освещения подводной обстановки | 2022 |
|
RU2785442C1 |
Изобретение относится к области гидроакустики, а именно к распределенным системам подводного наблюдения (РСПН). Технический результат - повышение дальности обнаружения и точности определения координат и параметров движения малошумных подводных объектов. Указанный технический результат достигается тем, что в состав РСПН для обеспечения измерения, последующего формирования и учета текущего вертикального распределения скорости звука (ВСРЗ) дополнительно включен стационарный измеритель ВСРЗ в виде заякоренного вертикального кабель-троса, на котором размещены: комплект расположенных равномерно вдоль кабель-троса с интервалом в 5-10 м комбинированных датчиков, включающих датчики температуры, электропроводности и давления воды; а также плавучесть; модем сетевой гидроакустической связи; блок управления; аккумуляторная батарея; якорное устройство. 2 ил.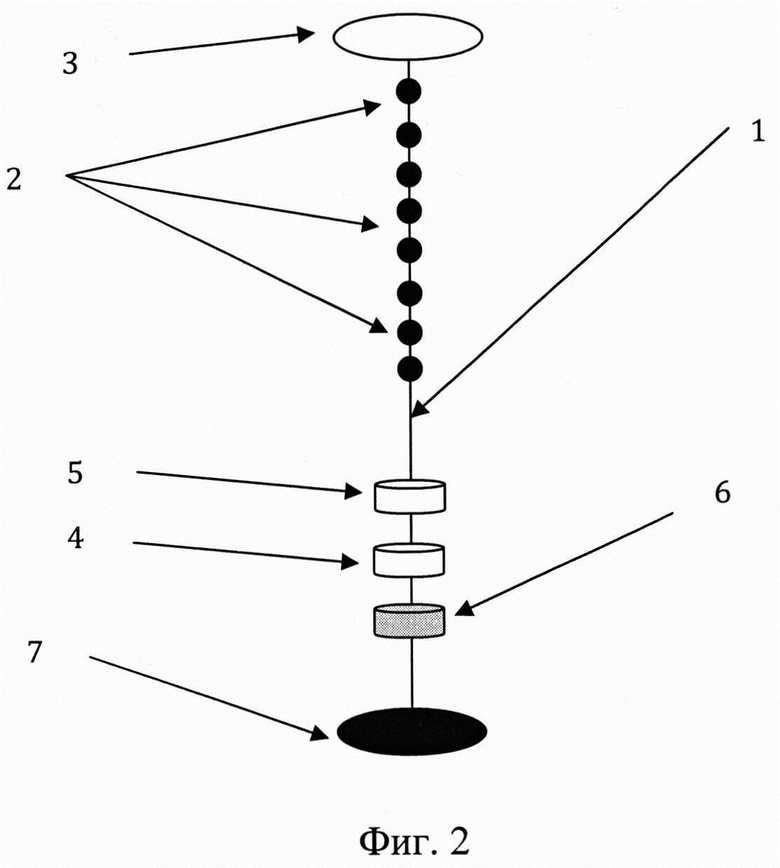
Распределенная система подводного наблюдения, включающая объединенные сетевой гидроакустической связью пункт управления и пространственно распределенные автономные пассивные и активные средства подводного наблюдения, отличающаяся тем, что содержит стационарный измеритель вертикального распределения скорости звука, выполненный в виде заякоренного вертикального кабель-троса, на котором размещены плавучесть, модем сетевой гидроакустической связи, блок управления, аккумуляторная батарея, якорное устройство, комплект расположенных равномерно вдоль кабель-троса с интервалом в 5-10 м комбинированных датчиков, каждый из которых включает датчик температуры, датчик электропроводности и датчик давления воды.
| МУЛЬТИСТАТИЧЕСКАЯ АКУСТИЧЕСКАЯ СИСТЕМА И СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ ПОДВОДНЫХ АППАРАТОВ | 2004 |
|
RU2364888C2 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1995 |
|
RU2084924C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ И НАДВОДНЫХ ОБЪЕКТОВ | 2017 |
|
RU2670176C1 |
| СИСТЕМА ДЛЯ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538440C2 |
| WO 2002059645 A3, 01.08.2002. | |||

