Изобретение относится к системам автоматического управления летательными аппаратами (ЛА), в частности к системам наведения на воздушные цели (ВЦ), включающим совместно функционирующие подсистемы с различными динамическими свойствами.
Процесс перехвата ВЦ является результатом взаимодействия различных подсистем, составляющих единую последовательную информационно-управляющую цепь, началом которой является цель, а конечным звеном - боевая часть средства поражения. Следует отметить, что каждая из этих подсистем обладает различной динамичностью [1], характеризующей ее способность реагировать на изменение входных воздействий. От того, в какой степени согласованы динамические свойства подсистем в процессе совместного функционирования, во многом зависит совершенство системы наведения в целом.
В общем случае требуемые динамические свойства подсистем перехватчика определяются его методом наведения и могут быть определены на основе его анализа на чувствительность [2] к изменению условий функционирования, определяемых динамическими свойствами цели.
В связи с этим весьма актуальной является задача разработки метода наведения, автоматически, учитывающего несоответствие динамических свойств перехватчика и цели. Один из способов решения этой задачи основан на представлении этого несоответствия в виде измеряемого возмущения [3].
Из известных технических решений наиболее близким является способ, выбранный в качестве прототипа и изложенный в [4]. В данном алгоритме сигнал управления учитывает ошибки по углу и угловой скорости в соответствии с формулой:

где
jп - поперечное ускорение перехватчика;
Kϕ - постоянный коэффициент усиления, определяющий вес ошибки управления по углу 
 - угол визирования цели;
- угол визирования цели;
 - угол визирования перехватчика;
- угол визирования перехватчика;
Kω - постоянный коэффициент усиления, определяющий вес сигнала  ошибки по угловой скорости;
ошибки по угловой скорости;
 - оцененная угловая скорость цели;
- оцененная угловая скорость цели;
 - оцененная угловая скорость перехватчика.
- оцененная угловая скорость перехватчика.
Недостатками прототипа являются:
1) недостаточный учет в прототипе несоответствия динамических свойств цели и перехватчика;
2) низкая устойчивость сопровождения при появлении в законах изменения сопровождаемых координат производных третьего и более высоких порядков.
Эти недостатки обусловлены тем, что в данном алгоритме не учитывается угловая скорость линии визирования. Их влияние можно уменьшить, если управлять динамичностью перехватчика с целью приближения ее к динамичности ЛА. Для этого необходимо использовать закон управления радиолокационной системой, на стадии синтеза которого будут скомпенсированы инерционные свойства системы. Этого можно достичь учетом угловой скорости линии визирования, дальности до цели и скорости ее изменения.
Технический результат, который может быть получен от использования предлагаемого изобретения, заключается в обеспечении высокой точности перехвата при наведении ЛА.
Заявленный технический результат достигается за счет использования предлагаемого способа для управления по поперечному ускорению, определяемому взвешенной суммой ошибок наведения, дополненной слагаемым, учитывающим угловую скорость линии визирования цели, дальность и скорость сближения с ней, наводимого на цель ЛА.
Сущность предлагаемого изобретения заключается в использовании простого и экономичного в вычислительном отношении метода синтеза управления на основе локальной оптимизации [2], не требующего решения сложной двухточечной краевой задачи [5], для получения способа формирования сигнала управления, при котором для системы

при наличии измерений

сформировать сигнал управления

оптимальный по минимуму функционала

В (2)-(5)
х - n-мерный вектор состояния;
F - динамическая матрица внутренних связей координат вектора х;
u - вектор сигналов управления;
В - матрица эффективности r-мерного (r≤n) вектора u управления;
t - текущее время;
s - вектор измеряемых возмущений, изменяющихся по произвольному закону;
z - вектор измерений;
Н - матрица связей z и х;
ξх и ξи - векторы центрированных гауссовских шумов состояния и измерений;
 - векторы оптимальных оценок х и s;
- векторы оптимальных оценок х и s;
Q1 - матрица «штрафов» за точность функционирования системы;
G1 - матрица, учитывающая взаимосвязи х и s;
К - матрица штрафов за величину сигналов управления.
Для упрощения записей будет опущена зависимость векторов от времени.
Для системы (2), в состав которой входит подсистема

формирующая входные воздействия для подсистемы

при наличии измерений (3) необходимо получить сигнал управления u, обеспечивающий отработку процесса (6) при условии несоответствия динамических свойств этих подсистем FУ≠FT.
Задача будет решаться в рамках линейно-квадратично-гауссовских представлений, для которых на основе теоремы разделения [5] задача управления может решаться независимо от задачи оптимального оценивания. При этом задача синтеза управления может решаться в детерминированной постановке (ξх=0 и ξи=0) при условии, что в полученном законе управления координаты состояния будут заменены их оптимальными оценками.
В общем случае несоответствие динамических свойств можно выразить вектором Δх=хТ-хУ, возникающих за счет этого ошибок, изменения которого во времени можно найти посредством решения уравнения

Подставляя (6) и (7) в (8), получим

Если динамические свойства подсистемы (7) соответствуют требуемым значениям (FУ=FT), то ошибка управления будет убывать вплоть до нуля со скоростью, определяемой ее динамическими свойствами (FУ), даже при отсутствии управления. В случае несоответствия динамических свойств (FУ≠FT) в соотношении (9) появляется вынужденная составляющая, зависящая от характера изменения хТ и воздействующего управления u. Отсюда следует, что выбором сигнала управления можно скомпенсировать несоответствие динамических свойств системы (7) и внешнего воздействия (6).
Управляющий сигнал, минимизирующий ошибку управления (9), при FУ≠FT, Δх=у и уТ=0 может быть получен из уравнения

где sУ=(FT-FУ)xT - измеряемое возмущение.
Тогда сигнал управления, минимизирующий (5) на основе (2)-(4) и (6)- (7), определяется соотношением (4):

при получении которого было учтено, что
В соответствии с выводами условия статистической эквивалентности координаты стояния хТ и хУ были заменены их оценками.
При оценке возможности компенсации несоответствия динамических свойств подсистем (6) и (7) на основе закона формирования управления (10) на примере наведения в горизонтальной плоскости перехватчика на интенсивно маневрирующий ЛА в качестве модели состояния перехватчика использовалось типовое уравнение, включающее инерционное и интегрирующее звенья [4]:

а в качестве модели движения цели - кинематические уравнения [4]:

В (11) и (12)
Т - постоянная времени перехватчика;
b - коэффициент его усиления;
 - дальность до цели и ее производная;
- дальность до цели и ее производная;
 - проекции поперечных ускорений цели и перехватчика на
- проекции поперечных ускорений цели и перехватчика на
перпендикуляр к линии визирования;
ξп и ξц - центрированные гауссовские шумы состояния.
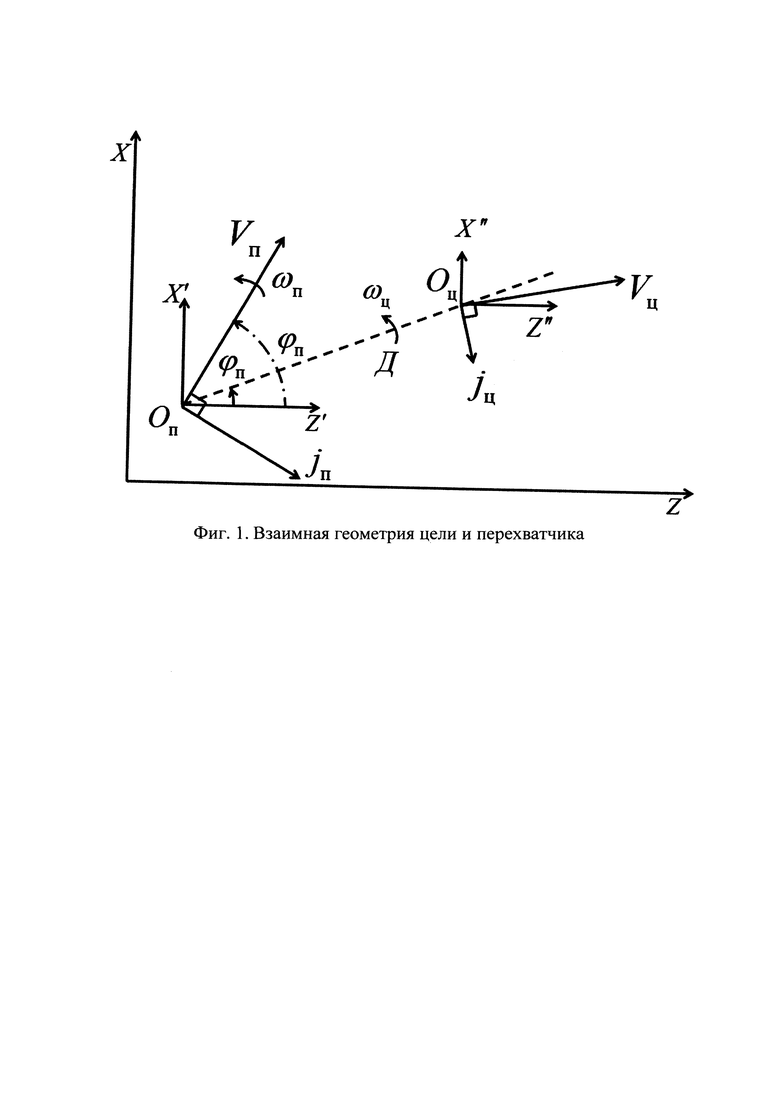
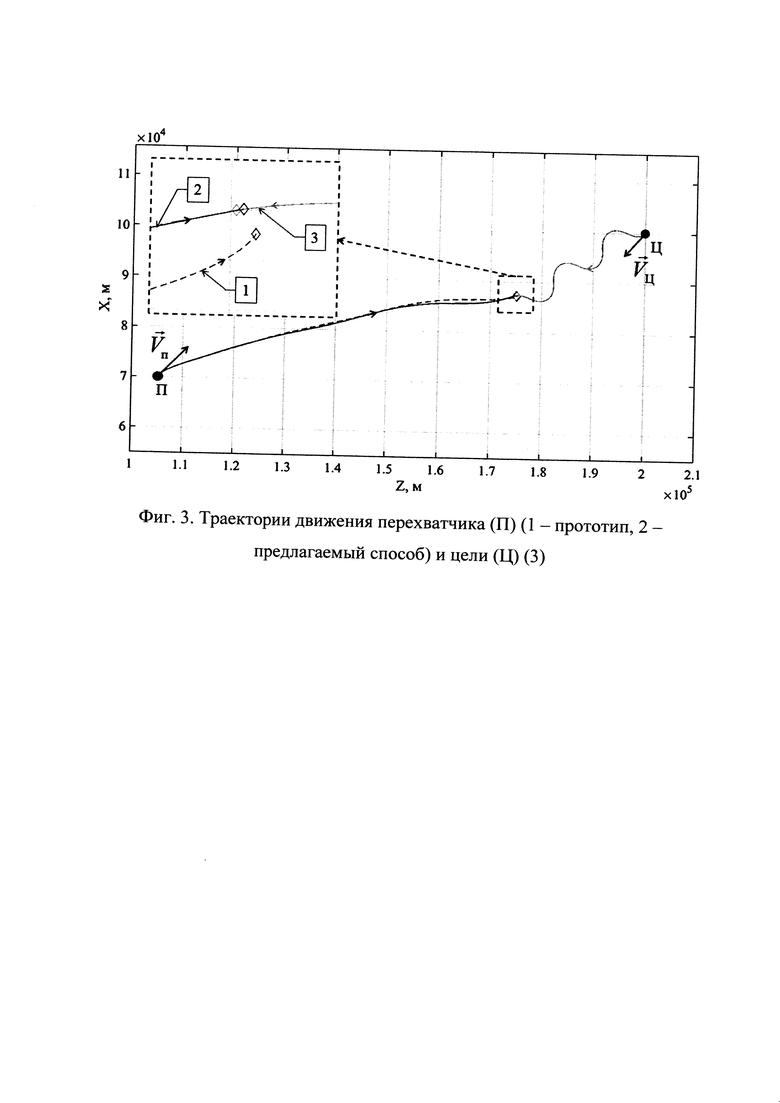
Взаимное геометрическое расположение цели и перехватчика показано на фигуре 1, на которой в декартовой неподвижной наземной системе координат XOZ точками Оп и Оц показано расположение перехватчика и цели, Vп соответствует продольной скорости наводимого ЛА, a Vц -продольной скорости цели.
Из (11) и (12) ошибки сопровождения по углу и угловой скорости могут быть представлены в виде

При появлении в (12) третьей и более высоких производных ϕц в (11) появляются нарастающие ошибки наведения (13), приводящие, в конечном счете, к срыву этого процесса.
С учетом (6), (7) из (11)-(13) векторы состояния и динамические матрицы связей системы принимают вид
В свою очередь, несоответствие динамических свойств перехватчика и цели определяется матрицей

Из (15) следует, что для устранения несоответствия динамических свойств цели и перехватчика необходимо выполнение условия 
Однако при Т=const обеспечить это условие невозможно, поскольку  меняются в процессе наведения. В связи с этим целесообразно использовать расчет сигнала управления перехватчиком по правилу (10) при условии, что матрицы К, Q, G записаны в общем виде:
меняются в процессе наведения. В связи с этим целесообразно использовать расчет сигнала управления перехватчиком по правилу (10) при условии, что матрицы К, Q, G записаны в общем виде:

Подставляя (14)-(16) в (10), с учетом выводов теоремы разделения получим

Анализ (17) позволяет сделать следующие выводы.
1. Полученный закон отличается от прототипа (1) учетом наравне с ошибками по углу и угловой скорости еще и несоответствия динамичности цели и перехватчика.
2. В состав оптимизируемой системы управления должны входить оптимальные фильтры, формирующие оптимальные оценки  и регулятор, вычисляющий сигнал управления (17).
и регулятор, вычисляющий сигнал управления (17).
3. Разработанный способ наведения не накладывает принципиальных ограничений на возможность его реализации ни по требуемой вычислительной производительности, ни по возможности его информационного обеспечения.
На фигуре 2 представлен вариант структурной схемы системы сопровождения цели с использованием предлагаемого способа учета несоответствия динамических свойств подсистем, где
1 - измерители, формирующие наблюдения z;
2 - фильтр, принимающий на вход сигналы наблюдений и формирующий оценки курса ЛА  и его первой производной
и его первой производной  оценки абсолютного углового положения цели
оценки абсолютного углового положения цели  и его первой производной
и его первой производной  дальности до цели
дальности до цели  и ее первой производной
и ее первой производной 
3 - усилитель, получающий на вход сигнал  и усиливающий его с коэффициентом
и усиливающий его с коэффициентом
4 - усилитель, получающий на вход  и усиливающий его с коэффициентом
и усиливающий его с коэффициентом 
5 - усилитель, получающий на вход сигналы  и формирующий сигнал
и формирующий сигнал 
6 - сумматор, получающий на вход сигналы 
 и формирующий сигнал управления jп;
и формирующий сигнал управления jп;
7 - перехватчик;
8 - цель.
Исследование полученного алгоритма проводилось в процессе имитационного моделирования пространственных эволюций цели, сопровождение которой в угломерном канале РЛС задается системой
и алгоритма формирования закона (17) управления перехватчиком (11).
Необходимо подчеркнуть, что манипулируя в (18) начальными значениями  можно реализовать самые разнообразные законы изменения ϕц.
можно реализовать самые разнообразные законы изменения ϕц.
В качестве показателей эффективности использовались текущие промахи, поперечные ускорения и время наведения. Необходимо отметить, что для проверки устойчивости наведения модель входных воздействий (18) специально была выбрана несоответствующей модели (12).
Исследования эффективности проводились в два этапа.
1. На первом этапе исследовалась эффективность перехвата гипотетической маневрирующей цели, бортовой пеленг которой изменяется по квазисинусоидальному закону, предопределяющему быструю смену знака производных. Способ (17) сравнивался с прототипом (1).
2. На втором этапе исследовалось влияние инерционности перехватчика на эффективность наведения.
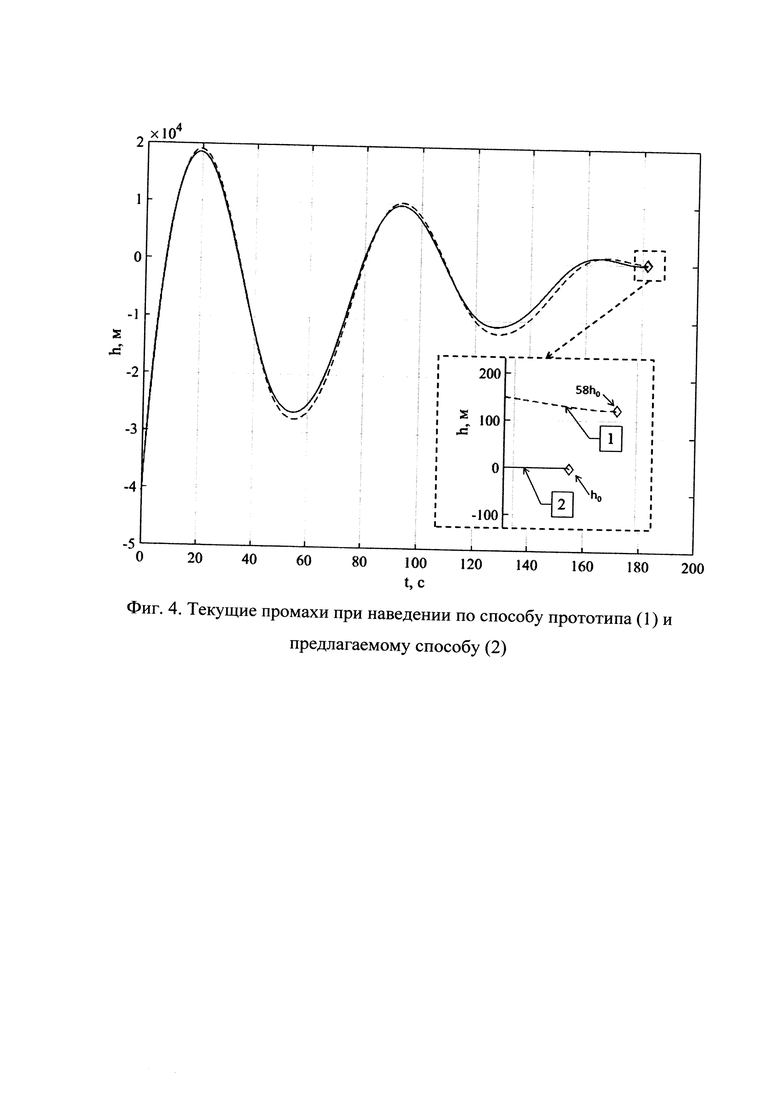
Результаты исследований первого этапа, на котором оценивались возможности (17) и (1) при наведении на цель, движущуюся по сложной квазисинусоидальной траектории при встречных курсах перехвата, иллюстрируются фигурами 3, 4 и 5, на которых представлены траектории перехвата, текущие промахи и поперечные ускорения перехватчика соответственно.
Из фигур видно, что закон управления (17), учитывающий несоответствие динамических свойств перехватчика и цели, обеспечивает существенно лучшую точность и меньшее время наведения. Однако преимущества (17) по сравнению с (1) проявляются лишь на конечном участке наведения. Поскольку метод показал свою эффективность в самых сложных условия для наведения, можно судить о его применимости и в более простых условиях.
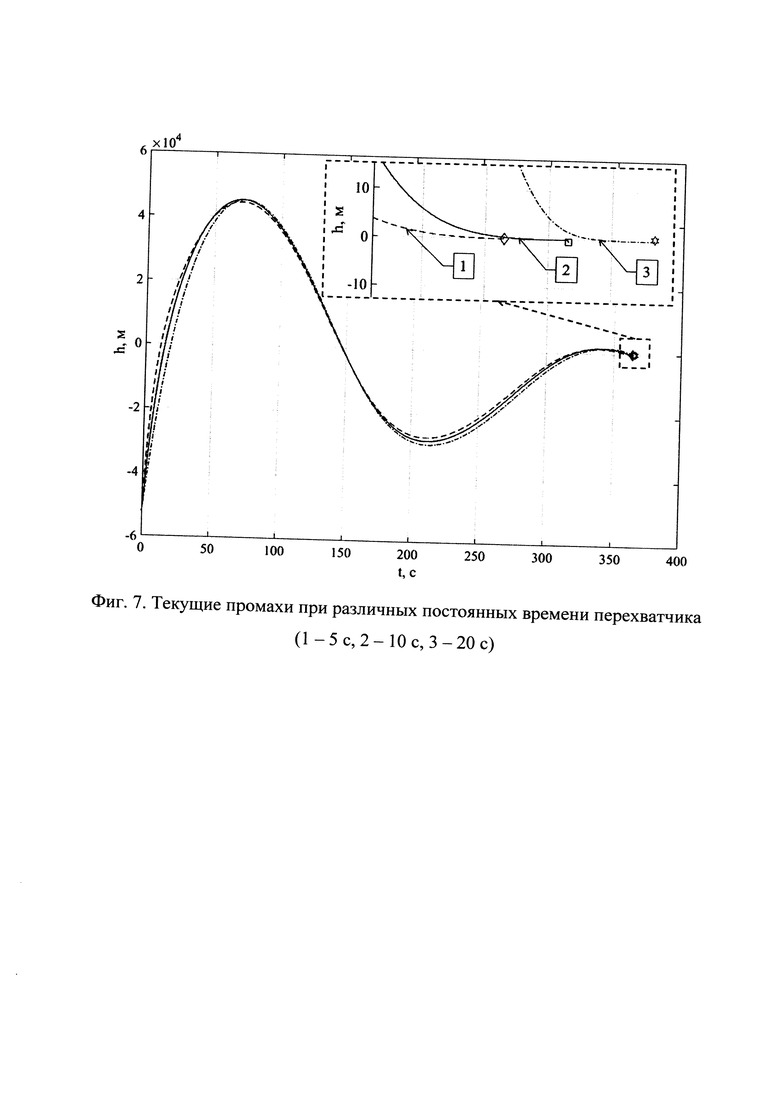
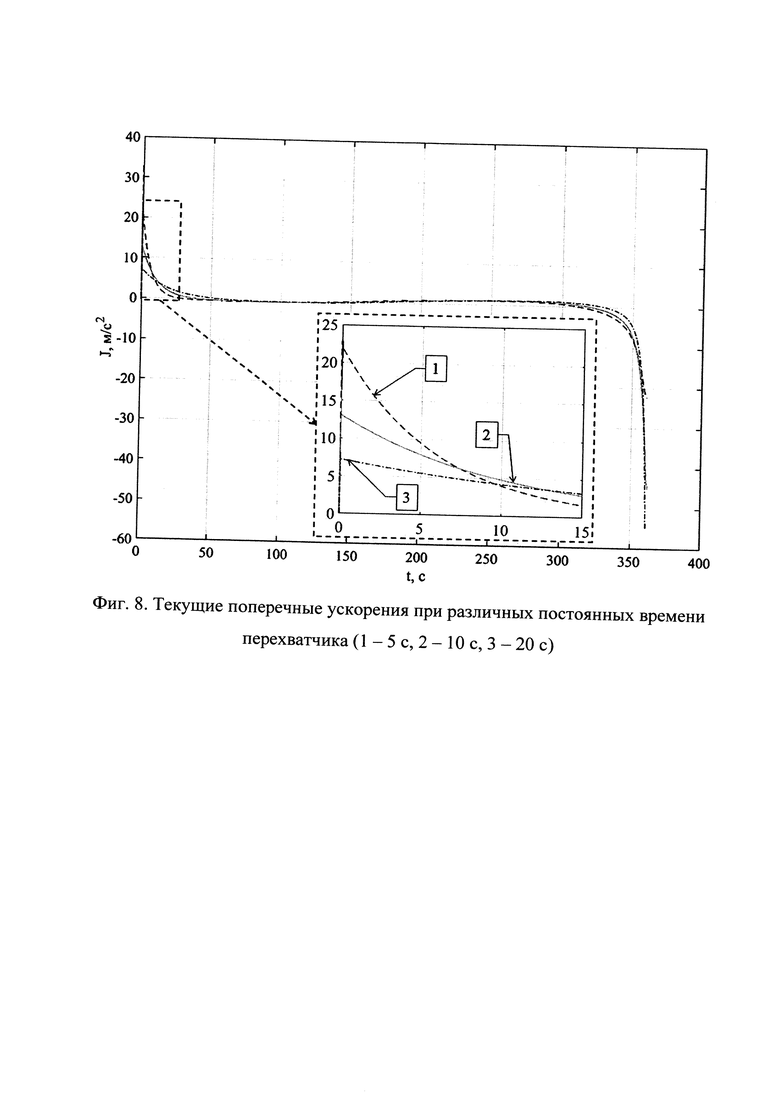
Результаты второго этапа, на котором исследовалось влияние инерционности перехватчика на показатели эффективности на примере перехвата цели, движущейся по квазисинусоидальной траектории на встречных курсах, проиллюстрированы на фигурах 6, 7 и 8, на которых представлены траектории перехвата, текущие промахи и поперечные ускорения перехватчика соответственно.
Из фигур видно, что метод обеспечивает практически одинаковые показатели точности при всех значениях постоянной времени перехватчика, однако энергетические затраты и время наведения увеличиваются с ростом постоянной времени наводимого ЛА, т.е. метод применим и для перехватчиков обладающих большой инерционностью.
Проведенные исследования позволяют сделать следующие выводы.
 Предложенный метод наведения обеспечивает устойчивый всеракурсный перехват интенсивно маневрирующих целей в более широком поле условий применения, нежели прототип, включая цели, движущиеся по квазисинусоидальной траектории.
Предложенный метод наведения обеспечивает устойчивый всеракурсный перехват интенсивно маневрирующих целей в более широком поле условий применения, нежели прототип, включая цели, движущиеся по квазисинусоидальной траектории.
Предложенный метод перехвата, учитывающий несоответствие динамических свойств цели и перехватчика позволяет улучшить точность наведения на конечном участке траектории.
Размер участка, на котором проявляется влияние третьего слагаемого в (17) определяется соотношением 
Метод применим для обширного класса наводимых ЛА, т.к. сохраняет свою работоспособность в большом диапазоне значений постоянной времени перехватчика.
Список использованных источников
1. Меркулов В.И. Динамичность авиационных комплексов и бортовые радиоэлектронные системы. // Радиотехника. 2010. №1.
2. Авиационные системы радиоуправления: учебник для военных и гражданских ВУЗов. / Под ред. В.И.Меркулова - М.: Изд. ВВИА им. проф. Н.Е.Жуковского, 2008.
3. Меркулов В.И. Учет измеряемых возмущений при локальной оптимизации систем управления. // Информационно-измерительные и управляющие системы. 2016. №2.
4. Авиационные системы радиоуправления. Т. 2. Радиоэлектронные системы самонаведения. / Под ред. А.И. Канащенкова и В.И. Меркулова - М.: Радиотехника, 2003.
5. Ройтенберг Я.Н. Автоматическое управление - М.: Наука, 1992.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ перехвата интенсивно маневрирующих высокоскоростных воздушно-космических объектов | 2017 |
|
RU2666069C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ПРИВОДОМ АНТЕННЫ, ОБЕСПЕЧИВАЮЩИЙ УСТОЙЧИВОЕ СОПРОВОЖДЕНИЕ ИНТЕНСИВНО МАНЕВРИРУЮЩИХ И ВЫСОКОСКОРОСТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ПОВЫШЕННОЙ АДАПТАЦИЕЙ К МАНЕВРУ НОСИТЕЛЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2598001C2 |
| СПОСОБ УСТРАНЕНИЯ НЕСООТВЕТСТВИЯ ДИНАМИЧНОСТИ ПОДСИСТЕМ В СОСТАВЕ СЛОЖНЫХ ТЕХНИЧЕСКИХ СИСТЕМ И СИСТЕМА ОБЕСПЕЧЕНИЯ БЕССРЫВНОГО СОПРОВОЖДЕНИЯ ИНТЕНСИВНО МАНЕВРИРУЮЩЕЙ ЦЕЛИ | 2015 |
|
RU2617870C2 |
| СПОСОБ НАВЕДЕНИЯ НА ВЫСОКОСКОРОСТНЫЕ ВЫСОКОМАНЕВРЕННЫЕ ВОЗДУШНЫЕ ОБЪЕКТЫ | 2020 |
|
RU2751378C1 |
| СПОСОБ ИНДИВИДУАЛЬНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ВОЗДУШНУЮ ЦЕЛЬ В СОСТАВЕ ПЛОТНОЙ ГРУППЫ | 2020 |
|
RU2742626C1 |
| Способ наведения летательного аппарата на наземные цели с помощью радиолокатора с синтезированием апертуры антенны | 2023 |
|
RU2824690C1 |
| СПОСОБ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ГИПЕРЗВУКОВЫЕ ЦЕЛИ | 2009 |
|
RU2408847C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ПРИВОДОМ АНТЕННЫ, ОБЕСПЕЧИВАЮЩИЙ УСТОЙЧИВОЕ СОПРОВОЖДЕНИЕ ИНТЕНСИВНО МАНЕВРИРУЮЩИХ И ВЫСОКОСКОРОСТНЫХ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2571363C2 |
| СПОСОБ ПЕРЕХВАТА ПРИОРИТЕТНОЙ ЦЕЛИ, ОБЕСПЕЧИВАЮЩИЙ СРЫВ НАВЕДЕНИЯ ИСТРЕБИТЕЛЕЙ СОПРОВОЖДЕНИЯ | 2020 |
|
RU2742737C1 |
| СИСТЕМА ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ СКРЫТНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В ЗОНЕ ОБНАРУЖЕНИЯ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС | 2017 |
|
RU2686802C1 |



Изобретение относится к системам управления, в частности к сложным системам, включающим совместно функционирующие подсистемы с различными динамическими свойствами. Предлагаемый метод наведения позволяет скомпенсировать несоответствие динамических свойств перехватчика и цели в процессе наведения без решения сложной двухточечной краевой задачи. При этом сигнал управления формируется по закону:

где jп - требуемое поперечное ускорение перехватчика; - оптимальные оценки курсов и угловых скоростей перехватчика и цели;
- оптимальные оценки курсов и угловых скоростей перехватчика и цели;  и
и  - оценки дальности до цели и ее первой производной; Т - постоянная времени перехватчика, характеризующая его инерционность; b - коэффициент усиления сигнала управления; q2l - коэффициент штрафов за точность наведения системы по углу; q22 - коэффициент штрафов за точность наведения системы по угловой скорости; g22 - коэффициент учета взаимодействия ошибок наведения и маневра цели; k - коэффициент штрафов за величину сигнала управления. В отличие от прототипа предлагаемый метод имеет третье нестационарное слагаемое, учитывающее несоответствие динамических свойств цели и перехватчика. Использование изобретения позволит обеспечить перехват быстродвижущихся целей в широком диапазоне их скоростей и курсов; экономию затрат энергии на управление на начальных участках наведения и повышение его точность на конечном участке. 8 ил.
- оценки дальности до цели и ее первой производной; Т - постоянная времени перехватчика, характеризующая его инерционность; b - коэффициент усиления сигнала управления; q2l - коэффициент штрафов за точность наведения системы по углу; q22 - коэффициент штрафов за точность наведения системы по угловой скорости; g22 - коэффициент учета взаимодействия ошибок наведения и маневра цели; k - коэффициент штрафов за величину сигнала управления. В отличие от прототипа предлагаемый метод имеет третье нестационарное слагаемое, учитывающее несоответствие динамических свойств цели и перехватчика. Использование изобретения позволит обеспечить перехват быстродвижущихся целей в широком диапазоне их скоростей и курсов; экономию затрат энергии на управление на начальных участках наведения и повышение его точность на конечном участке. 8 ил.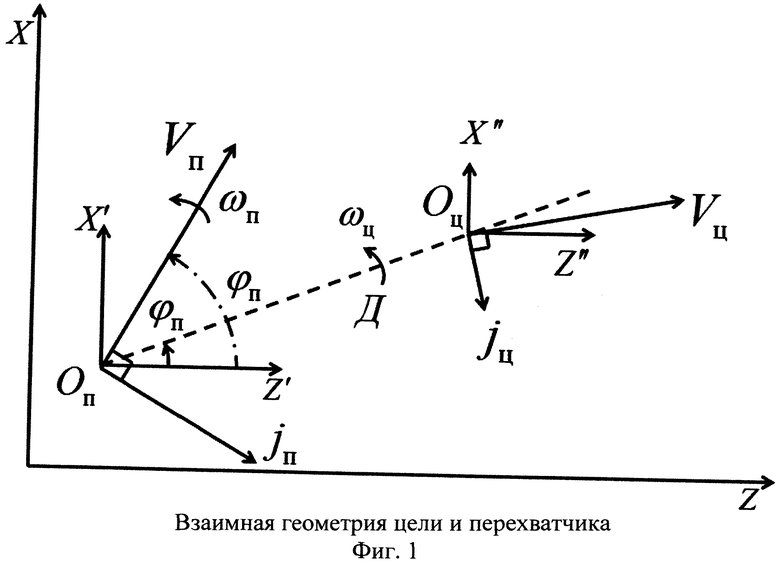
Способ наведения инерционного летательного аппарата (ЛА) с учетом несоответствия динамических свойств цели и перехватчика, заключающийся в том, что на наводимом ЛА в фильтре угломерного канала формируют оптимальные оценки своего курса  и его первой производной по времени
и его первой производной по времени  курса цели
курса цели  и его первой производной по времени
и его первой производной по времени  а в фильтре дальномерного канала - оптимальную оценку дальности до цели
а в фильтре дальномерного канала - оптимальную оценку дальности до цели  после чего на основе сформированных оценок по закону
после чего на основе сформированных оценок по закону

формируют сигнал управления требуемым поперечным ускорением jп перехватчика, где
 - оптимальные оценки курсов и угловых скоростей перехватчика и цели;
- оптимальные оценки курсов и угловых скоростей перехватчика и цели;
Т - постоянная времени перехватчика, характеризующая его инерционность;
b - коэффициент усиления сигнала управления;
q21 - коэффициент штрафов за точность наведения системы по углу;
q22 - коэффициент штрафов за точность наведения системы по угловой скорости;
k - коэффициент штрафов за величину сигнала управления, отличающийся тем, что в фильтре дальномерного канала дополнительно формируют оптимальную оценку  первой производной по времени дальности
первой производной по времени дальности  до цели, после чего модифицированный сигнал
до цели, после чего модифицированный сигнал  управления формируют на основе сформированного значения jп по правилу
управления формируют на основе сформированного значения jп по правилу

где
 - оценки дальности до цели и ее первой производной;
- оценки дальности до цели и ее первой производной;
g22 - коэффициент учета взаимодействия ошибок наведения и маневра цели,
после этого сформированный по правилу (2) сигнал  передают в систему управления ЛА.
передают в систему управления ЛА.
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 1998 |
|
RU2146804C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМЫХ РАКЕТ | 2013 |
|
RU2539825C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ИНТЕНСИВНО МАНЕВРИРУЮЩУЮ ВОЗДУШНУЮ ЦЕЛЬ | 2004 |
|
RU2254542C1 |
| DE 0069913490 D1, 22.01.2004 | |||
| ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА БЕСПИЛОТНОГО САМОЛЕТА-ИСТРЕБИТЕЛЯ | 2010 |
|
RU2418267C1 |

