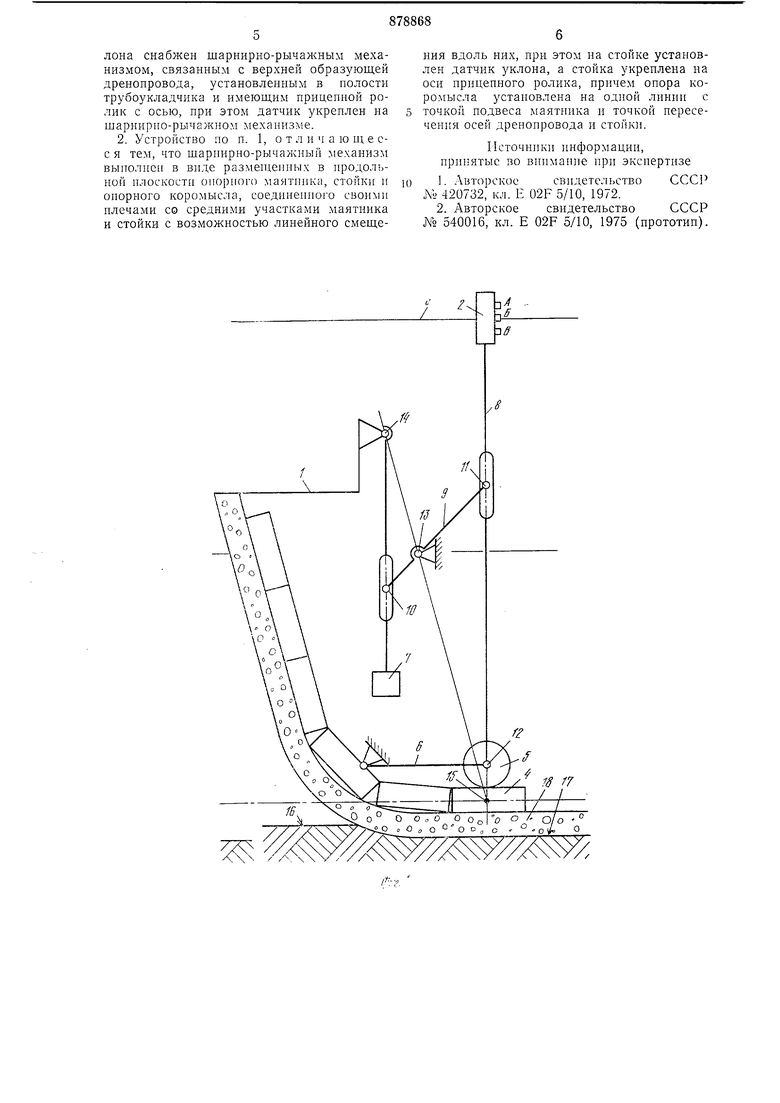
На фиг. 1-4 изображен трубоукладчик с устройством для коитроля прямолииейиости укладываемого дреиопровода при различных ситуациях отклоиения дрепопровода от прямолинейности, вид сбоку.
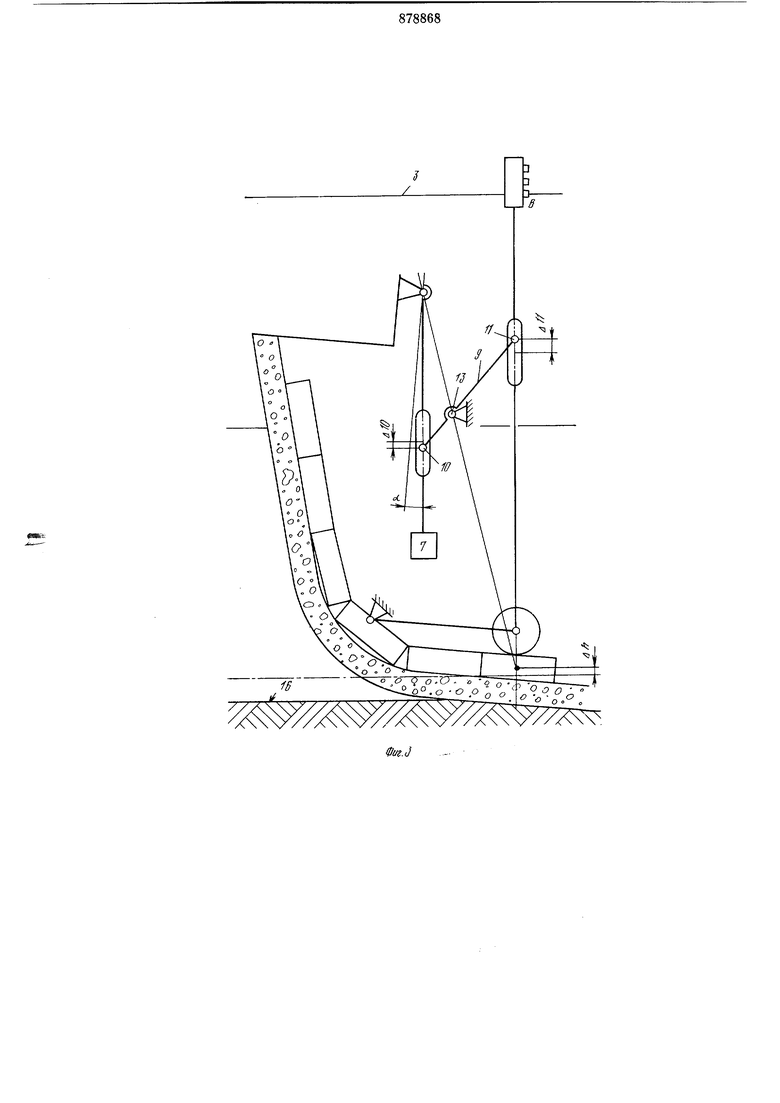
Устройство для контроля прямолипейпости укладываемого дреионровода включает связанный с трубоукладчиком 1 датчик 2 Зклона, который взаимодействует электрически с копирной линией 3 и мехаиически с грунтовой поверхностью и соединен с управлением высотным иоложенисм рабочего органа. Датчик 2 уклона снабжен шарннрно-рычажным механизмом связи с верхней образующей дренонровода 4, установленным в полости трубоукладчика 1 и имеющим катающийся но дренопроводу прииенной ролик 5 на буксире 6, при этом датчик 2 укреплен на механизме. Последний выполнен в виде размещенных в продольной плоскости маятиика 7, стойки 8 и опорного коромысла 9, соединенного своими плечами 10 и 11 со средними участками ма5ггннка 7 и стойки 8 с возможностью смещения вдоль них. Стойка 8 укреплспа на oci-t 12 нрицепного ролика 5 и несет датчик 2 уклона на оголовке. Опора 13 коромысла 9 установлена на одной линии с точкой 14 под,веса маятпика 7 и точкой 15 иересечоп-я осей дренопровода 4 и стойки 8, что обеспечивает выдерживание соотноншиие подобия:
14,,13М)
13,,11
Датчик 2 уклона представляет собой фоточувствнтельную головку с тремя фотодиодами А, Б и В, реагирующими на лазерный луч. Расстояние между фотодиодами (А-Б )и (Б-В) равно допустимому отклонению фактической оси дренопровода 4 от проектной ирямоугольиой оси и составляет 15 мм.
Работает устройство для коитроля прямолинейности укладываемого дреноировода следующим образом.
При линейном иере,1ещении рабочего органа образуется транщея, дно которой находится на уровне 16. Под действием массы трубоукладчика дно транщеи деформируется до уровня 17, на который укладываются фильтрующий нодслой 18 и дреиопровод 4. При нормальиой работе фактическая ось дренонровода совпадает с проектпой прямолинейной осью дрены, лазерный луч копирной линии 3 попадает на фотодиод Б (фиг. 1). При уменьщении подслоя 18 изза неиодатливости материала дренопровод будет укладыватьея ниже проектпой лшнш на величину Д/г (фиг. 2), что ириведет к смещению вниз стойки 8 с роликом 5 и датчиком 2. При этом из-за зиачительиой длины (до 500 мм) буксира 6 ролика 5 угол поворота этого буксира незначителен (нри перемещении стойки 8 на нормативно допустимое отклонение 15 мм этот угол составляет всего ), и поэтому стойка 8 смен1ается пракгически вертнкальио. Если вертикал1)Иое смсп1,ение нревосходит допустпмое отклопспие .трепопровода от прямолписйпости (15 м), лазериый луч копирной лннии 3 поиадает на фотодиод А датчика 2 уклоиа, от которого нодается сигиал па сигиал ный иульт управления высотпым по.ггожснием рабочего органа, предупреждая о недопустимом отклоне)ПП1 от нрямолинейностп. В этом случае необходимо вручную исправить новерхиость дна трапп ен и переложить участок дреноировода.
В случае встречи трубоукладчика с твердым грунтом массы трубоукла.дчика становится недостаточно для деформации дна трГлинеи до уровня Г/, в резхльтате чего он
начппает выглубляться с поворотом па угол а (фиг. 3) в 11родол1Л10Й плоскости. Прп этом, так ак маятник 7 продолжает со,рапят1 верти.кальпое по.южеппе, происходит поворот коромьила 9, в результате
которого плгчо JO коромькла нсремеп,аетс, впня по маятппку 7, а плечо 11 - вверх по стойке 8 соответственно па велнчнны .МО и All, Oi1pa3y:onu e cooTHOHiciuie:
AlO
40,13
(2)
Д
I3,n
Г1з С01:оставлсппя выражений (1) и (2) i i:uio, что при повороте коромысла 9 стойка 8 сохраняет (как н маятннк 7) всртнкальное положение. В npoiiecce выглублепня трубоукладч 1ка происходит смещение стойки 8 вверх. При достижении смещения стойки 8 на величину А/г ДОПУСТИМОЙ непрямо.1ипейиости .лазерпьп , попа.чает па
фототиод В датчика 2 уклоиа, что обеспечивает выдачу сги-пала па пульт.
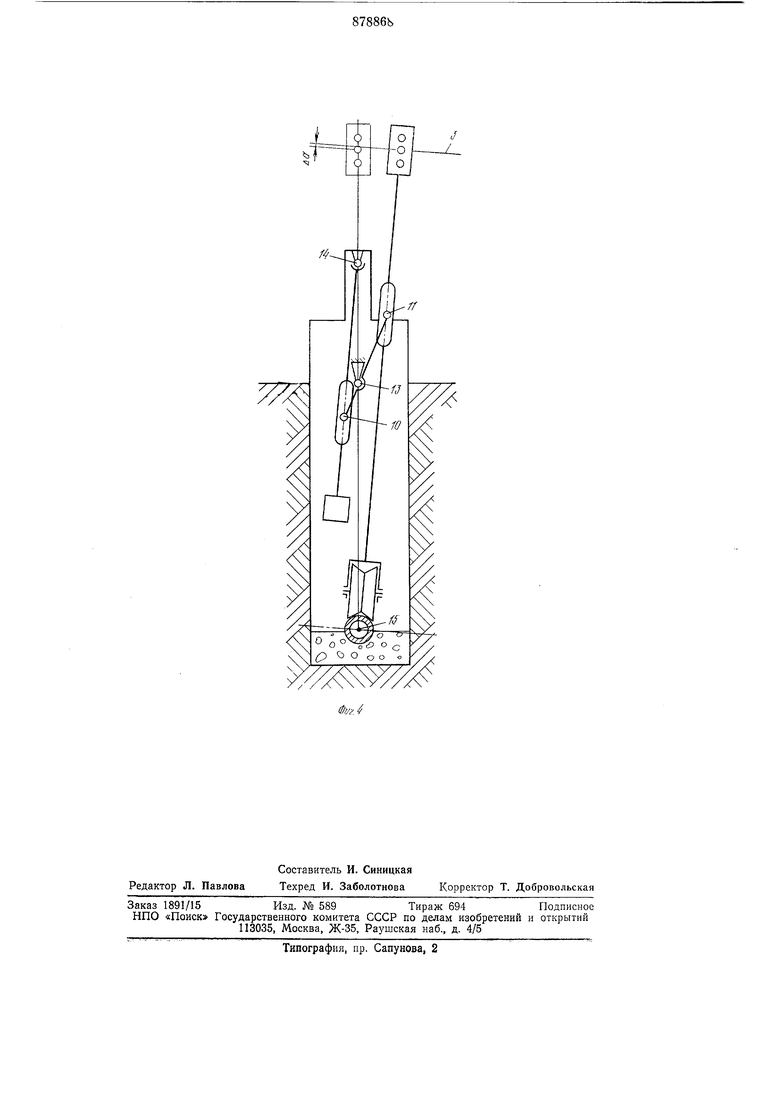
Прп работе пс косогоре (фпг. 4) датчик 2 уклона использует спе:п1альное корректируюн,ее устройство, сохраияющ.ее неизменн,1м расстояние от линии 3 до дна трапшеп и устраияюш,им ошибку Аа, 1:.г,:)пика он;ую от способности щарнирпо-рычажного механизма выходить из нродольjiofi п.москостн трубоукладчика. Работа устпойства на Kocoi ope ана.гюгична описанной вьпне. Па пзменеиия угла косогора устройсТ15о не реагирует.
Ф о р .м у ;i а и з о б р е т е н н я
1. Устройство для контроля прямолинейности укладывае.мого дрепопровода, имею1ДСГО верхнкою образуюгцую, включающее гвязаппый с трубоукладчпком датчик уклона, который взаимодействует электрически с копнрной лннней и механически с грунтовой поверхностью н соединен с управлеппсм высотным положеннем рабочего органа, о т л и ч а ю щ е е е я тем, что, с целью
;1овып1ения точности контроля датчик уклона снабжен шарнирно-рычал ным механизмом, связанным с верхней образующей дренопровода, установленным в полости трубоукладчика и имеющим прицепной ролик с осью, при этом датчик укреплен на шарнирпо-рычажном механизме.
2. Устройство по п. 1, отличающесс я тем, что шарнирно-рычажпый механизм выполнен в виде размещенных в продольной плоскости опорного маятника, стойки п опорного коромысла, соединенного своими плечами со средними участками маятника и стойки с возможностью линейного смещения вдоль них, при этом на стойке установлен датчик уклона, а стойка укреилена на оси нрицепного ролика, причем опора коромысла установлена на одной линии с точкой подвеса маятиика и точкой пересечения осей дреноировода и стойки.
Источники информации, принятые во внимание при экснертнзе
1.Авторское свидетельство ССС1 Л 420732, кл. Е 02F 5/10, 1972.
2.Авторское свидетельство СССР №. 540016, кл. Е 02F 5/10, 1975 (ирототии).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля параметров гибкого дренопровода | 1980 |
|
SU901406A1 |
| Устройство одновременного управления высотным и поперечно-угловым положениями рабочего органа землеройной машины | 1977 |
|
SU734353A1 |
| Устройство для подъема участка трубопровода в траншее при ремонте | 1980 |
|
SU918633A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ КУРСОВОГО ДВИЖЕНИЯ ТРУБОУКЛАДЧИКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2019496C1 |
| Машина для прокладки дренопровода | 1978 |
|
SU768892A2 |
| Полуавтомат для стачивания деталей по заданному контуру | 1974 |
|
SU506665A1 |
| Датчик пути | 1990 |
|
SU1788164A1 |
| Поливная машина | 1982 |
|
SU1642945A3 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙПРОДОЛЬНО-ПОПЕРЕЧНОЙ СТАБИЛИЗАЦИИПОЛОЖЕНИЯ РАБОЧИХ ОРГАНОВ12 | 1971 |
|
SU426614A1 |
| Устройство для формирования слоя изделий | 1991 |
|
SU1828429A3 |