Изобретение относится к измерительной технике, а именно к устройствам для измерения параметров приемников акустических колебаний, используемых в гидроакустике.
Известно, что для корректной интерпретации получаемых с помощью векторных приемников данных, необходимо проводить измерения ряда параметров, характеризующих совершенство конструкции приемника, в частности к таким параметрам относится форма характеристики направленности канала векторного приемника и амплитудно-частотная характеристика канала векторного приемника. Как правило, векторные приемники содержат несколько каналов, чаще всего три векторных и один скалярный канал. При этом векторные каналы чувствительны к колебательной скорости или колебательному ускорению в акустической волне, а скалярный канал чувствителен к давлению акустической волны. Рабочий диапазон векторных приемников простирается от долей герца до десятков килогерц в зависимости от назначения. Для измерения параметров векторных приемников существуют различные методы, отличающиеся по степени достоверности полученных результатов, при этом наиболее надежными считаются методы, которые позволяют осуществить испытания в условиях, максимально приближенных к условиям эксплуатации.
Применение такого подхода, однако, наталкивается на трудности, связанные с необходимостью генерации стабильного акустического поля с известными характеристиками в рабочем диапазоне частот, с тем чтобы можно было сравнивать результаты, получаемые для векторных приемников при испытаниях разными методами. Стандартным считается испытания в условиях плоской волны или приведение результатов к условиям плоской волны (п. РФ №2141742). Однако генерация плоской волны, особенно в области низких частот, когда длина волны может составлять десятки и сотни метров, представляет технически сложную задачу, связанную как с излучением волны необходимой мощности, так и с необходимостью устранить отражения от звукоотражающих границ, если используется гидробассейн, и различных элементов, находящихся в зоне проведения испытаний (п. РФ №2620772, п. РФ №2563603).
Один из методов, призванный уменьшить отражения, искажающие акустическое поле и, соответственно, снижающие точность получаемых результатов, применен в устройстве, являющимся наиболее близким аналогом к заявляемому, патент РФ №126475 U1.
Предлагаемое устройство содержит рамку с размещаемым внутри испытуемым приемником и излучателем. Излучатель выполнен с возможностью орбитального движение вокруг испытуемого приемника. Рамка крепится к несущей трубе, снабженной полым валом, внутри которого проложен кабель, соединенный с излучателем. Имеется также датчик угла поворота излучателя и приводной двигатель с редуктором, осуществляющим вращение, и электронный блок. При этом редуктор соединен с полым валом. Извлечение рамки с приемником из воды осуществляется путем поворота несущей трубы вокруг горизонтальной оси, прикрепленной к верхнему концу несущей трубы, и, в свою очередь, закрепляемой, например, на пирсе.
Приемник находится в ближнем поле излучателя, а отражения, искажающие результаты, стремятся снизить за счет размещения устройства вдали от отражающих границ.
К недостаткам описанного устройства относится то, что если оно используется на мелководье, будучи установленном, например, на пирсе, то отражения от дна (обычно глубина места в таких случаях бывает порядка 2-3 м) и опорных конструкций пирса приводят к искажению акустического поля, создаваемого излучателем. Ситуация усугубляется тем, что при вращении излучателя (при исследовании характеристики направленности) меняются расстояния от излучателя до границ и опорных конструкций, что ведет к непрерывно меняющимся условиям отражения излученного сигнала, интерферирующего с излучаемым полем, что ведет к неконтролируемому изменению параметров акустического поля, которое воздействует на испытуемый приемник. При исследовании амплитудно-частотной характеристики векторного приемника неконтролируемая изменчивость параметров акустического поля порождается изменением частоты излучаемого сигнала, что вызывает изменение длины волны и связанных с этим условий отражения излученного сигнала от границ и опорных конструкций, несмотря на то, что при исследования амплитудно-частотной характеристики излучатель не вращается.
Для борьбы с этим явлением следует проводить работы на как можно больших глубинах и на удалении от берега, что практически реализуемо при установке известного устройства на борту судна или, например, на понтоне, установленном на якорях на удалении от берега. Однако при этом, из-за высокой чувствительности приемников к ускорениям, работы можно проводить только при полном штиле в условиях отсутствия волнения, что в реальности на морских акваториях бывает крайне редко, из-за чего проведение работ по определению характеристик векторных приемников с борта судна или на понтоне становится практически невозможным.
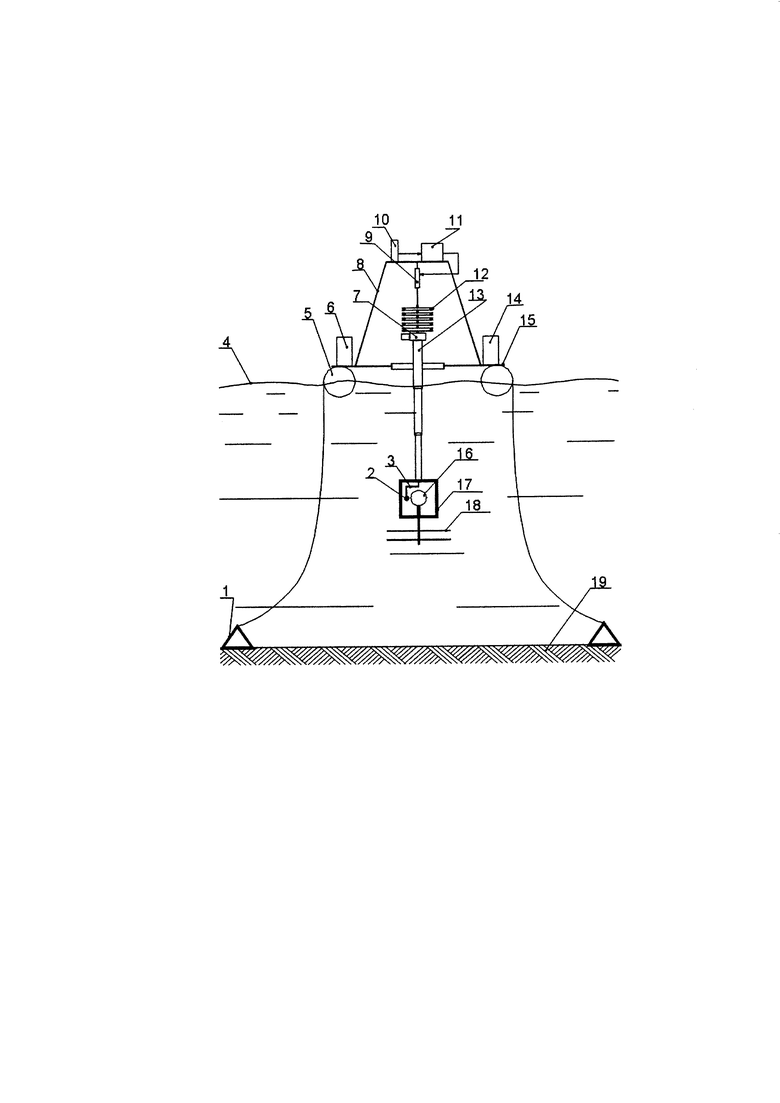
Проблема, требующая решения - снижение влияния поверхностного волнения при определении параметров векторных приемников в условиях открытого моря. Технический результат - повышение точности определения параметров векторных приёмников, а также расширение диапазона погодных условий, при которых возможно проведение работ. Поставленная задача решается с помощью мобильного устройства для определения параметров векторных приёмников, обеспечивающего компенсацию поверхностного волнения. Мобильное устройство для определения параметров векторных приёмников, включает понтон, снабженный платформой с отверстием в центре и установленной на ней фермой, блок питания, датчик вертикальных ускорений, процессорное устройство, электронный блок и измерительную систему, состоящую из рамки для размещения векторного приёмника, содержащей излучатель акустических сигналов, установленный с возможностью орбитального движения вокруг приемника и соединенный с телескопическим валом, расположенным внутри телескопической трубы, которая соединена с рамкой и прикреплена верхним своим концом к корпусу редуктора с электромотором, вращающим телескопический вал, и управляемым электронным блоком, при этом верхняя часть корпуса редуктора соединена с нижним концом упругого элемента, верхний конец которого соединен с выдвижным штоком электропривода, управляемого процессорным устройством, соединенным с датчиком вертикальных ускорений, а верхний конец электропривода закреплен на ферме, при этом нижняя часть рамки устройства снабжена демпфирующим элементом с присоединенной массой. Заявляемая конструкция устройства, состоит практически из нескольких взаимосвязанных между собой подсистем, а именно: несущей (понтон), обеспечивающей позиционирование на акватории, измерительной, установленной на понтоне и обеспечивающей как заглубление рамки с исследуемым приёмником на необходимую глубину, так и создание акустического поля с заданными параметрами и регистрацию получаемых результатов, а также подсистемы, компенсирующей ускорения, возникающие за счёт колебаний понтона на волнении, что обеспечивает достижение заявленного технического результата: повышение точности определения параметров векторных приёмников, а также расширение диапазона погодных условий, при которых возможно проведение работ. Упругий элемент должен обладать податливостью на изгиб и растяжение, сохраняя жёсткость на кручение и может быть выполнен, например, в виде системы нескольких колец, попарно соединённых в диаметрально противоположных точках. Демпфирующий элемент с присоединённой массой может быть реализован, например, в виде прикреплённых к вертикальному стержню горизонтально ориентированных массивных дисков с некоторым шагом, определяемым допустимыми габаритными размерами устройства. Техническая сущность и принцип действия устройства поясняются рисунком на Фиг., где 1- якорная система; 2 - излучатель акустических сигналов; 3 - горизонтальный кронштейн излучателя; 4 - поверхность воды; 5 - плавучесть понтона; 6 - блок питания; 7 - редуктор с навешенным электромотором; 8 - ферма; 9 - электропривод с выдвижным штоком; 10 - датчик вертикального ускорения; 11 - процессорное устройство; 12 - упругий элемент; 13 - телескопическая труба; 14 - электронный блок; 15 - платформа понтона; 16 - испытуемый векторный приёмник; 17 - рамка; 18 - демпфирующее устройство; 19- дно акватории. Понтон представляет собой платформу 15 (например, прямоугольной формы, изготовленную, например, из листового металла достаточной толщины) с отверстием посередине, для опускания под воду заглубляемой части испытательного устройства, установленную на плавучестях 5, представляющих собой, например, две герметичные ёмкости цилиндрической формы подходящего объёма, закреплённые вдоль краёв платформы. На платформе 15 жестко закреплена ферма 8, например, пирамидальной формы, состоящая из жестко соединенных металлических стержней. Понтон удерживается на акватории с помощью якорной системы 1. На ферме 8, соосно отверстию в платформе 15 закреплен электропривод 9. Также на платформе 15 установлены блок питания 6 с аккумуляторами, обеспечивающий электропитание всей аппаратуры, электронный блок 14, управляющий работой измерительного устройства, а также датчик вертикального ускорения 10 и процессорное устройство 11. Датчик вертикального ускорения целесообразно разместить вблизи оси телескопической трубы на вершине фермы 8, с целью снижения погрешности от килевой и бортовой качки, а процессорное устройство целесообразно установить в непосредственной близости от датчика ускорения с целью сокращения длины соединительного кабеля. Измерительное устройство включает рамку 17, внутри которой устанавливают исследуемый векторный приёмник 16. Рамка 17 снабжена излучателем 2 акустического сигнала, который установлен на кронштейне 3,обеспечивающим возможность его орбитального движения вокруг приемника 16.Излучатель 2 соединен с телескопическим валом (на фиг. не показан),проходящим внутри телескопической трубы 13, к нижнему концу которой прикреплена рамка 17. Кронштейн 3 задает расстояние между центром приемника и центром излучателя 2 и вращается вместе с телескопическим валом, обеспечивая орбитальное движение излучателя 2 акустических сигналов вокруг центра векторного приемника 16. Излучатель 2 акустических сигналов и векторный приемник 16 соединяются кабелями (на фиг. 1 не показаны) с электронным блоком 14, расположенным на платформе понтона 15, задающим напряжения необходимых частоты и амплитуды для работы излучателя 2 и регистрирующим сигналы векторного приемника 16. В связи с тем, что излучатель 2 вращается, кабель для излучателя пропускается с некоторой слабиной, позволяющей, за счет наматывания кабеля на телескопическую трубу 13, совершать излучателю акустических сигналов 2 несколько оборотов, например, 2 или 3, в одну сторону, после чего вращение излучателя 2 совершается в обратную сторону на то же число оборотов, с целью разматывания кабеля.
Для заглубления рамки с приемником на глубину, обеспечивающую необходимое удаление от звукоотражающих границ, труба 13 с проходящим внутри валом выполнены телескопическими. Последовательное соединение секций трубы 13, также как и секций вала, осуществляют стандартным способом, например, с помощью зубчатой муфты с целью, в случае вала - передачи крутящего момента, а в случае трубы - восприятию реактивного момента, порождаемого, в том числе, трением вала в трубе и трением закручивающегося кабеля излучателя 2. Верхний конец телескопической трубы 13 закреплен на корпусе редуктора 7 с навешенным электромотором, а верхний конец телескопического вала соединен с выходным валом редуктора 7. Извлечение рамки 17 из воды можно осуществить, например, путем выбирания прикрепленного к верхней части рамки троса (на фиг. не показанного), при этом секции телескопической трубы и вала вдвигаются одна в другую. Опускание рамки 17 в этом случае происходит под действием силы тяжести при отдавании троса, прикрепленного к верхней части рамки 17, при этом секции телескопической трубы и телескопического вала выходят одна из другой. Для предотвращения разъединения секций тубы и вала, в случае, например, обрыва вышеназванного троса, секции должны быть оснащены стопорами (на фиг. не показаны), ограничивающими величину выдвигания секций.
Редуктор 7 с навешенным электромотором, подключен кабелем к электронному блоку 14, осуществляющему управление электромотором редуктора 7, приводящим излучатель акустических сигналов 2 во вращение через редуктор, телескопический вал и кронштейн 3. На валу электромотора, навешенного на редуктор 7, установлен датчик числа оборотов вала мотора (на фиг. не показан), подключенный к электронному блоку 14, за счет чего оказывается возможным вычисление угла поворота излучателя 2 относительно центра векторного приемника 16 с большой точностью. Для проведения качественных измерений излучатель 2 должен совершать порядка 1 оборота в минуту; типичное значение числа оборотов электромотора, навешенного на редуктор 7, может составлять, например, 5000 оборотов в минуту; даже если датчик числа оборотов генерирует, например, всего 1 импульс на оборот, то одному обороту излучателя 2 будет соответствовать 5000 импульсов датчика числа оборотов, что обеспечивает точность 0.072 градуса при определении угла поворота излучателя акустического сигнала 2 вокруг центра векторного приемника 16.
Система, компенсирующая ускорения испытательного устройства, содержит датчик вертикального ускорения 10, передающий пропорциональный вертикальному ускорению сигнал в процессорное устройство 11, управляющее электроприводом 9. Процессорное устройство 11 осуществляет двойное интегрирование сигнала датчика 10 вертикального ускорения, в результате чего получают сигнал, пропорциональный вертикальному перемещению понтона 5 на волнении. Полученный сигнал используется для управления электроприводом 9 с выдвижным штоком, который закреплен на ферме 8, а шток электропривода 9 соединен с верхним концом упругого элемента 12, при этом нижний конец упругого элемента 12 соединен с корпусом редуктора с навешенным электромотором 7. Электропривод с выдвижным штоком 9, отрабатывает сигнал, поступающий из процессорного устройства 11, увеличивая или уменьшая величину выдвижения штока так, чтобы компенсировать вертикальные перемещения понтона в пространстве относительно верхнего конца упругого элемента 12, стремясь обеспечить неподвижность верхнего конца упругого элемента 12 в пространстве, несмотря на вертикальные перемещения понтона на волнении. В связи с наличием килевой и бортовой качки, а также неизбежных погрешностей работы системы, состоящей из датчика вертикальных ускорений 10, процессорного устройства 11 и электропривода с выдвижным штоком 9, связанных с неточностью измерений ускорения датчиком 10 и ограниченным быстродействием электропривода с выдвижным штоком 9, обеспечить абсолютную неподвижность в пространстве верхнего конца упругого элемента 12 при наличии волнения невозможно. Для снижения остаточных ускорений векторного приемника 16, установленного в рамке 17 испытательного устройства, вызванного перемещениями верхнего конца упругого элемента 12 под действием вышеприведенных факторов, к нижней части рамки 17 испытательного устройства прикреплен демпфирующий элемент 18. Демпфирующий элемент представляет собой несколько (например, 2, как показано на фиг. 1) дисков максимально большого, приемлемого в эксплуатации, диаметра, расположенных один над другим на приемлемом, с точки зрения удобства эксплуатации и транспортировки расстоянии, например, 0.2 м, и закрепленных на центральном стержне, который и прикрепляется к рамке 17 испытательного устройства. При вертикальных смещениях (перпендикулярно плоскости дисков) на дисках развивается гидродинамическая сила, направленная против смещения. С другой стороны, масса объема воды, заключенного в пространстве между дисками представляет собой присоединенную массу, которая, при должном выборе размеров и количества дисков демпфирующего элемента, может в десятки раз превосходить массу испытательного устройства, и, вместе с тем, не препятствует медленному извлечению испытательного устройства из воды, что позволяет обойтись без грузоподъемного оборудования при проведении работ. Упругий элемент 12, может быть выполнен, например, в виде системы нескольких колец, попарно соединенных в диаметрально противоположных точках, что обеспечивает податливость на изгиб и растяжение, но жесткость на кручение.
Упругий элемент 12 вместе с демпфирующим элементом 18, с учетом присоединенной массы, представляет собой колебательную систему, резонансная частота которой определяется отношением жесткости на растяжение к массе, причем чем больше масса и меньше жесткость, тем меньше резонансная частота. При этом гидродинамические силы, развивающиеся на дисках, создают демпфирование вертикальных движений. Такая система, как известно из теории колеблющихся систем, представляет собой фильтр первого порядка, который пропускает перемещения с частотой ниже резонансной частоты и подавляет перемещения с частотой выше резонансной частоты, чем и достигается защита векторного приемника, подвешенного в рамке испытательного устройства, от помех, вызванных перемещениями понтона на волнении и возникающими при этом ускорениями. При этом, низкочастотные воздействия, которые могли бы пропускаться данным фильтром, устраняются электроприводом с выдвижным штоком 9.
Таким образом, применение управляемого процессорным устройством 11 электропривода с выдвижным штоком 9, соединенного последовательно с вышеописанным фильтром, образованным упругим элементом 12 и демпфирующим элементом 18 с присоединенной массой, снижает уровень ускорений, воздействующих на испытуемый векторный приемник, при наличии волнения на акватории, где производятся измерения.
Для изготовления устройства могут быть использованы серийно выпускаемые материалы, например, алюминиевый металлопрокат из коррозионностойкого сплава Амг6 для большинства конструктивных элементов, стеклотекстолит для упругого элемента, как материал с низким модулем упругости и обладающий высокой прочностью и коррозионной стойкостью. Для процессорного устройства и электронного блока могут быть использованы, например, процессоры Atmega 16. В качестве электропривода с выдвижным штоком возможно использование, например, серийно выпускаемых механизмов линейных перемещений с электроприводом подходящей мощности и размерности.
Заявляемое устройство для определения параметров векторных приемников, может быть полностью собрано в удобном месте, например на берегу или борту судна, вплоть до установки в рамку исследуемого векторного приемника. За счет наличия телескопической трубы с валом, при должном выборе размеров фермы, установленной на платформе понтона, устройство, при вдвинутых друг в друга телескопических секциях трубы и вала может иметь небольшие размеры, в частности высота устройства в описанном компактном состоянии равна суммарной высоте понтона и фермы, что позволяет легко транспортировать устройство по берегу, буксировать устройство по воде, или устанавливать устройство с палубы судна на воду, а также осуществлять постановку на якоря, после чего осуществляется опускание рамки с векторным приемником на необходимую глубину и производятся измерения, при этом за счет возможности извлечения рамки с векторным приемником из воды для замены одного приемника на другой можно осуществить измерения для любого количества приемников. По окончании работ устройство приводится в компактное состояние и отправляется на хранение.
Предложенная система позволяет определить такие параметры векторных приемников как амплитудно-частотные характеристики каналов векторного приемника и характеристики направленности каналов на различных частотах, для получения которых исследуемый приемник помещают в поле плоской волны, частоту колебаний которой ступенчато изменяют в пределах рабочего диапазона, и для каждой частоты необходимо осуществляют вращение оси чувствительности канала относительно вектора распространения волны на 360°. В связи техническими сложностями, возникающими при генерации плоской волны в предлагаемом устройстве применен метод калибровки в ближнем поле излучателя малой мощности, причем поле считается сферическим, а приведение к условиям плоской волны (для определения амплитудно-частотной характеристики) осуществляется путем умножения результатов на частотно-зависимые коэффициенты. Характеристики направленности пересчету не подвергаются. При реализации данного метода необходимо, чтобы уровень сигнала, отраженного от звукоотражающих границ среды (поверхность воды 4, дно 19) был пренебрежимо мал по сравнению с уровнем прямого сигнала, что достигается за счет излучения сигнала малой мощности при условии размещения излучателя акустических сигналов в непосредственной близости от приемника (1-2 дм от центра приемника), а сам приемник с излучателем акустических сигналов при этом должен быть как можно дальше удален от звукоотражающих границ (например, 3-5 м при глубине места, например, 6-10 м). По сравнению с прототипом, если принять, что в прототипе расстояние до звукоотражающих границ составляет 1/2 глубины места (а глубина места 3 м), то увеличение расстояния до звукоотражающих границ до 5 м, например, (при глубине места 10 м) позволяет понизить уровень отраженных от границ сигналов примерно в 10 раз, (при сферическом законе распространения акустической волны, имеющем место в рассматриваемой системе, снижение интенсивности сигналов пропорционально квадрату расстояния) за счет чего достигается увеличение точности измерений. При необходимости еще более понизить уровень отраженных сигналов, испытательное устройство может быть размещено и на больших глубинах. При получении характеристик направленности, с точки зрения минимизации вибрационных помех, возникающих от работы механизмов устройства, выгодно приемник держать неподвижно, а относительное вращение канала приемника и вектора колебательной скорости акустической волны осуществлять за счет орбитального вращения излучателя акустических сигналов вокруг центра приемника.
| название | год | авторы | номер документа |
|---|---|---|---|
| АМФИБИЙНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2022 |
|
RU2778403C1 |
| Маятниковый калибровочный вибростенд | 2020 |
|
RU2749702C1 |
| Устройство для приема упругих колебаний | 1976 |
|
SU586410A1 |
| МОРСКОЙ ЭКОЛОГО-ЭНЕРГЕТИЧЕСКИЙ КОМПЛЕКС | 2011 |
|
RU2466053C1 |
| Устройство для фиксации лихтеров в кормовом проеме лихтеровоза | 1977 |
|
SU682412A1 |
| Способ ультразвуковой дефектоскопии трубопровода | 2024 |
|
RU2834582C1 |
| САМОДВИЖУЩАЯСЯ ПЛАТФОРМА РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2015 |
|
RU2583254C1 |
| ПЛАВУЧАЯ ВЕТРОЭЛЕКТРИЧЕСКАЯ УСТАНОВКА | 1998 |
|
RU2173280C2 |
| БУЙ ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК МОРСКИХ ВЕТРОВЫХ ВОЛН | 2014 |
|
RU2561229C1 |
| АКУСТИЧЕСКОЕ КАРОТАЖНОЕ УСТРОЙСТВО | 2013 |
|
RU2532759C1 |
Изобретение относится к измерительной технике, а именно к устройствам для измерения параметров приемников акустических колебаний, используемых в гидроакустике. Мобильное устройство для определения параметров векторных приемников содержит понтон, снабженный платформой с отверстием в центре и установленной на платформе фермой, а также блок питания, датчик вертикальных ускорений, процессорное устройство, электронный блок и измерительную систему, состоящую из рамки для размещения векторного приемника, содержащей излучатель акустических сигналов, установленный с возможностью орбитального движения вокруг приемника и соединенный с телескопическим валом, расположенным внутри телескопической трубы, соединенной с рамкой и прикрепленной верхним своим концом к корпусу редуктора с электромотором, вращающим телескопический вал и управляемым электронным блоком. При этом редуктор в верхней части соединен с упругим элементом, верхний конец которого соединен с выдвижным штоком электропривода, управляемого процессорным устройством, соединенным с датчиком вертикальных ускорений, а второй конец электропривода закреплен на ферме, при этом нижняя часть рамки снабжена демпфирующим элементом с присоединенной массой. Технический результат - повышение точности определения параметров векторных приемников, а также расширение диапазона погодных условий, при которых возможно проведение работ. 3 з.п. ф-лы, 1 ил.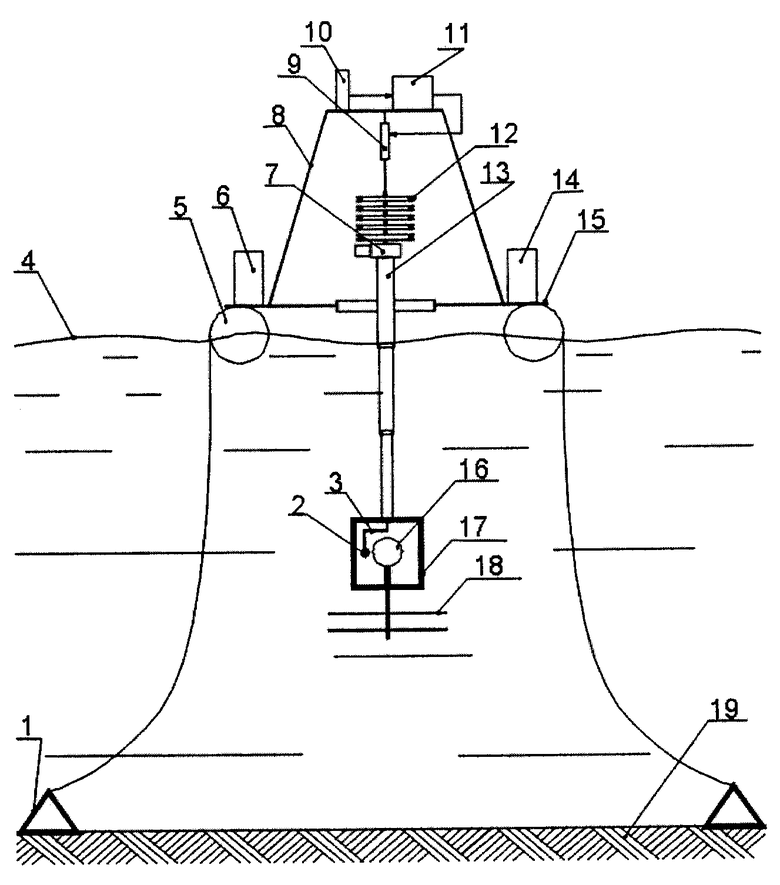
1. Мобильное устройство для определения параметров векторных приемников, включающее понтон, снабженный платформой с отверстием в центре и установленной на платформе фермой, а также блок питания, датчик вертикальных ускорений, процессорное устройство, электронный блок и измерительную систему, состоящую из рамки для размещения векторного приемника, содержащей излучатель акустических сигналов, установленный с возможностью орбитального движения вокруг приемника и соединенный с телескопическим валом, расположенным внутри телескопической трубы, соединенной с рамкой и прикрепленной верхним своим концом к корпусу редуктора с электромотором, вращающим телескопический вал и управляемым электронным блоком, при этом редуктор в верхней части соединен с упругим элементом, верхний конец которого соединен с выдвижным штоком электропривода, управляемого процессорным устройством, соединенным с датчиком вертикальных ускорений, а второй конец электропривода закреплен на ферме, при этом нижняя часть рамки снабжена демпфирующим элементом с присоединенной массой.
2. Устройство по п. 1, отличающееся тем, что упругий элемент представляет собой кольца, попарно соединенные в диаметрально противоположных точках.
3. Устройство по п. 1, отличающееся тем, что демпфирующий элемент с присоединенной массой представляет собой горизонтально ориентированные диски, расположенные на вертикальном стержне.
4. Устройство по п. 1, отличающееся тем, что ферма представляет собой стержневую конструкцию пирамидальной формы.
| Этажерочный опрокидывающийся фильтр-пресс | 1959 |
|
SU126475A1 |
| Способ градуировки гидрофонов методом эталонного излучателя | 2016 |
|
RU2620772C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЧУВСТВИТЕЛЬНОСТИ ПО ПОЛЮ ГИДРОАКУСТИЧЕСКОГО ПРИЕМНИКА | 2014 |
|
RU2563603C1 |
| СПОСОБ ТРАНСПОРТИРОВКИ БРУСЬЕВ ЛЬДА СУДАМИ-ЛЕДОВОЗАМИ | 1998 |
|
RU2145561C1 |
| CN 202783720 U, 13.03.2013 | |||
| KR 1020120043500 A, 04.05.2012 | |||
| CN 208136938 U, 23.11.2018. | |||

