Настоящее изобретение относится к хирургическим шаблонам, к способу их изготовления и способу их конструирования, в результате чего хирургические шаблоны имеют воспроизводимое позиционирование геометрическим замыканием или силовым замыканием. Настоящее изобретение также относится к программному обеспечению, которое может помочь в конструировании хирургических шаблонов, например, для зубных имплантов, а также к изображениям изготовленных хирургических шаблонов, имеющих воспроизводимое позиционирование геометрическим или силовым замыканием.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Зубной хирургический шаблон представляет собой индивидуально изготавливаемое устройство, предназначенное для использования в хирургии, например, в облегчении установки зубных имплантов. Точнее сказать, хирургический шаблон может быть предназначен для помощи оперирующему пользователю в подготовке остеотомии для зубных имплантов, и помощи ему в установке зубных имплантов согласно предварительному операционному плану. Хирургический шаблон предпочтительно подготавливается индивидуально, то есть имеет размеры, являющиеся специфическими для анатомии каждого пациента.
Традиционные зубные хирургические шаблоны находятся в полном контакте со своей опорной поверхностью или полностью совмещены с их опорной поверхностью в полости рта, поскольку их контактирующая поверхность основана на негативном отображении опорной поверхности. Отклонения, относительно подлинной опорной поверхности, в областях хирургического шаблона, которые опираются на опорную поверхность, приводят к неправильному позиционированию хирургического шаблона на опорной поверхности.
На фиг.1a представлен традиционный пластиковый хирургический шаблон 5, который основан полностью на полном контакте с опорной поверхностью зубов 4 или десны 7 зубного ряда 1. На фиг.1b представлен схематический поперечный разрез традиционного хирургического шаблона 5, как изображено на фиг. 1a, в положении, в котором смонтирован направляющий элемент (обычно вкладыш 14), например, вставлен в корпус шаблона 5. Корпус хирургического шаблона 5 представляет собой частичное негативное изображение опорной поверхности зубного ряда 1, что приводит к непрерывному, полному контакту для его опоры. В примере на фиг. 1b по меньшей мере часть опорной поверхности представлена как десна 7, а на фиг. 1a опорная поверхность представлена как полный контакт с зубом 4. Как представлено на фиг. 1b, пространство 8 под вкладышем 14 закрыто с каждой стороны шаблоном 5 до десны 7 на обеих сторонах, так что планируемое место 6 импланта не видно стоматологу. Также существует ограниченная возможность обеспечить орошение для операции сверления, когда сверло вставляется через вкладыш 14 и используется для сверления отверстия для вмещения импланта, из-за закрытия места импланта шаблоном 5. На фиг. 2 и также фиг. 2 представлены поперечные разрезы известного хирургического шаблона, при этом корпус хирургического шаблона представляет собой по меньшей мере частичное негативное изображение опорной поверхности, что приводит к полному контакту. На фиг. 2 и 3 опорная поверхность представляет собой зуб 4 и также десну 7. На фиг. 2 шаблон 5 опирается на большую часть поверхности зуба 4 и десну 7. На фиг. 3 шаблон 5 опирается на части поверхности зуба 4 и десну 7. Поскольку десна обладает способностью сдавливаться, во время хирургического вмешательства положение и ориентация шаблона может изменяться.
Традиционные хирургические шаблоны, используемые для облегчения установки зубных имплантов, удерживаются на месте во время хирургического вмешательства посредством пальца, прижимающего шаблон к опорной поверхности, или посредством фиксации его к челюстям с использованием винтов или штифтов в предварительно просверленных отверстиях. Ручное удерживание хирургического шаблона на месте добавляет сложности хирургической операции, поскольку оно требует дополнительной помощи, то есть 'дополнительной руки', что также может привести к более ограниченной операционной свободе и более ограниченному обзору внутри полости рта. Фиксация хирургического шаблона с использованием фиксирующих винтов или фиксирующих штифтов в предварительно просверленных отверстиях увеличивает инвазивность хирургического вмешательства.
Патент США 9,226,801 B2, озаглавленный ʺПолучение индивидуального связываемого изображения и многофункциональная ложкаʺ, относится к ложке, которая может представлять собой хирургический шаблон, который сконструирован на основе цифрового представления жесткой части анатомических образований полости рта, и который контактирует с этими анатомическими образованиями полости рта в определенном наборе контактных элементов. Однако форма этих контактных элементов, описанных в этом патенте, специально не определена, и может быть, хотя и ограниченной в области контакта, протяженной по характеру. Контакт по протяженной площади является чувствительным к возникновению деформаций, или выступов, которые могут возникать при несовершенном сканировании или изготовлении. Более того, место этих контактных элементов никоим образом не подлежит оценке на основании некоторого математического условия (например, условие геометрического замыкания) до изготовления (то есть во время цифрового проектирования), и требует только контактного элемента, выступающего из верхней стенки шаблона, и по меньшей мере одного контактного элемента, выступающего из боковой стенки шаблона. На самом деле этот патент включает в себя вариант осуществления с ʺвозвратным контактомʺ, не допускающий перемещения структуры полости рта во время вставки и удаления шаблона. Однако, не описано, как достигается этот возвратный контакт, то есть конкретно не определены его форма и место, при которых обеспечивается фиксированное состояние.
Патентная заявка США US2011/0066267 A1 описывает способ создания хирургической направляющей сверла, которая опирается на жесткую часть анатомических образований полости рта пациента. В предпочтительном варианте осуществления хирургический шаблон опирается на по меньшей мере 3 (три) зуба для обеспечения стабилизирующего треножного эффекта. Этот частный вариант осуществления гарантирует, что хирургический шаблон остается устойчивым на опорной поверхности (зубах) только при определенных состояниях внешней силы. Например, шаблон будет, вероятно, оставаться в стабильном положении, когда прилагается вертикальная, направленная вниз сила, но он ни в коем случае не останется на месте при приложении к шаблону боковой или направленной вверх силы.
Международная патентная публикация WO 2014/040695 A1 также описывает способ изготовления хирургического шаблона для создания остеотомии согласно предварительному плану операции. Цифровое представление внутренней структуры полости рта пациента используется в качестве основы для цифрового проектирования хирургического шаблона. Однако хирургический шаблон контактирует с опорной поверхностью обширно, и, следовательно, не соответствует заданному условию местоположения, за исключением того, что он не заходит за границы опорной поверхности.
Патентная заявка США 2004/0146830 описывает шаблон для измерения геометрии поверхности челюсти пациента посредством контактного измерения с использованием отдельных штифтообразных контактных кончиков. Посредством фиксации этих штифтов положение шаблона может быть зафиксировано на костной структуре. Вариант осуществления может представлять собой направляющий сверло элемент, прикрепленный к этому шаблону, что превращает его в хирургический шаблон для создания остеотомии. Хотя это применение патента описывает опору хирургического шаблона на жесткую структуру полости рта посредством отдельных контактных точек, место этих контактных точек ни коим образом не определяется до изготовления шаблона. Поскольку положение шаблона не определяется до изготовления, также положение направляющего элемента для хирургических инструментов не определяется до хирургического вмешательства, что делает обременительной процедуру обеспечения направления хирургических инструментов согласно предварительному плану операции. Устройство также является очень большим по размеру, и занимает большую часть внутренней высоты, особенно над молярами.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В аспекте вариантов осуществления настоящего изобретения обеспечивается способ изготовления зубного хирургического шаблона, который может использоваться для помощи в хирургическом вмешательстве, например, установке зубных имплантов, в результате чего хирургический шаблон может быть размещен на анатомических образованиях полости рта пациента или на их лабораторной копии, например, зубной хирургический шаблон может быть подогнан к внутренней структуре полости рта и может опираться на внутреннюю структуру полости рта, при этом корпус хирургического шаблона включает в себя, относительно жесткой части внутренней структуры полости рта, набор из по меньшей мере семи контактных элементов, представляющих собой точечные контакты, которые контактируют с опорной поверхностью внутренней структуры полости рта. Число точечных контактов может составлять 8, 7-10, 7-12, 7-15, 7-20 или 7-30. Точечные контакты представляют собой контакты "точка-площадь", и могут представлять собой, например, сферические, сфероидальные, конические, цилиндрические или пирамидальные по форме точечные контакты. Точечные контакты могут представлять собой точечные контакты с ʺнулевой площадьюʺ, например, сферические, сфероидальные, конические, цилиндрические или пирамидальные по форме точечные контакты, при которых ʺнулевая площадьʺ означает точечный контакт размером 0 мм² при цифровом проектировании. Площадь физического контакта такого точечного контакта может вычисляться посредством аппроксимации с использованием модели Герца из классической механики точечных контактов. Положения этих точечных контактных элементов определяются до изготовления шаблона, то есть они могут быть частью его цифрового проектирования. Положения этих точечных контактных элементов могут соответствовать математическому условию, что хирургический шаблон и 3D- опорная поверхность, например, жесткая 3D-опорная поверхность, действуют совместно для достижения геометрического замыкания или силового замыкания, когда хирургический шаблон устанавливается на 3D-опорную поверхность, предпочтительно жесткую 3D-опорную поверхность. Поверхности внутренних структур полости рта, которые поддерживают шаблон, далее совокупно называются 3D-опорной поверхностью, которая является предпочтительно жесткой 3D-опорной поверхностью. 3D-опорные поверхности, при использовании в настоящей заявке, могут относиться к части анатомических образований пациента, например, челюсти, зубным рядам, деснам и тому подобному, и/или протезам, прикрепленным к пациенту, например, зубам, установленным имплантам, несъемным и съемным протезам, коронкам или мостам, или другим реставрационным элементам, пломбам, винирам и/или их лабораторной копии. Геометрическое замыкание определено как состояние, при котором хирургический шаблон не может быть удален с опорной поверхности ни в каком направлении посредством действия какой-либо внешней силы на шаблон, то есть любого сочетания величины силы/направления силы/места приложения силы, без деформирования опорной поверхности или без деформирования хирургического шаблона, при этом последнее включает в себя смещение положения контактных элементов относительно корпуса хирургического шаблона.
Перед изготовлением шаблон проектируется цифровым способом и содержит
1) набор как минимум семи контактных элементов, которые контактируют с цифровым представлением опорной поверхности как точечные контакты, например, контакты "точка-площадь", например, точечные контакты с нулевой площадью. Указанные точечные контакты могут быть, например, сферическими, сфероидальными, коническими или пирамидальными или цилиндрическими по форме,
2) один или более направляющих элементов для зубных инструментов, и
3) корпус, который не находится в контакте с 3D-опорной поверхностью, предпочтительно 3D-жесткой опорной поверхностью. Корпус соединяет контактные элементы и один или более направляющих элементов в единую часть. Установленный корпус предпочтительно не находится в контакте с 3D-опорной поверхностью, предпочтительно 3D-жесткой опорной поверхностью, во избежание любой помехи действию контактных элементов. Корпус, следовательно, также не находится в контакте с любой другой частью полости рта, которая может мешать действию точечных контактов.
Физический шаблон, полученный путем цифрового проектирования, может быть изготовлен посредством послойного изготовления или фрезерования, например, фрезерования на станке с ЧПУ типа CNC, или их сочетания. Положение точечных контактов, например, контактов "точка-площадь", например, точечных контактов с нулевой площадью контактных элементов хирургического шаблона может достигаться посредством первоначального использования компьютерной системы для математического определения набора из по меньшей мере семи пространственных положений на цифровом представлении 3D-опорной поверхности, и последующего использования компьютерной системы для оценки этого набора положений с точки зрения математического условия геометрического замыкания или силового замыкания. Возможно вручную, то есть посредством взаимодействия с человеком, указать исходный набор мест, и затем в автоматическом режиме, снова посредством применения компьютерной системы, выполнить математический алгоритм, определяющий последующие 2-й, 3-й … наборы пространственных положений. Они могут быть снова оценены с использованием компьютерной системы в отношении математического условия геометрического замыкания или силового замыкания. Хирургический шаблон предпочтительно имеет ограниченное число контактных точек, при этом минимальное и максимальное число контактных точек определяется, как описано выше (например, менее 30, менее 20 или менее 15, но, например, 7 или более).
Для оценки условия геометрического замыкания или силового замыкания компьютерная система выполняет математический алгоритм, который использует пространственные координаты пространственных положений на цифровом представлении 3D-опорной поверхности и соответствующие направления этих положений, нормальные к этой цифровой опорной поверхности.
В частном варианте осуществления изобретения обеспечивается компьютерная система, имеющая программное обеспечение, которое используется компьютерной системой для цифрового генерирования контактных элементов, то есть, контактов "точка-площадь", например, контактов с нулевой площадью или сферических, сфероидальных, конических, цилиндрических или пирамидальных по форме контактных элементов, которые контактируют с цифровым представлением опорной поверхности в точечных контактах, например, на каждом из мест набора, который удовлетворяет критерию геометрического или силового замыкания.
Для сферических по форме контактов, то есть, частного варианта осуществления изобретения, предпочтительно, чтобы центр сферы, которая создает контакт, располагался по направлению, нормальному 3D-опорной поверхности, предпочтительно 3D-опорной поверхности в этих положениях. На этой линии центр сферы располагается на расстоянии от опорной поверхности, которое точно равно выбранному радиусу этой контактной сферы. В результате хирургический шаблон пересекается с опорной поверхностью в этой контактной точке, являющейся сингулярной точкой, то есть поверхность спроектированной цифровым образом контактной сферы не проникает в цифровое представление 3D-опорной поверхности, предпочтительно жесткой 3D-опорной поверхности, на стадии проектирования, как и не отстоит от цифрового представления 3D-опорной поверхности, предпочтительно жесткой 3D-опорной поверхности. Именно это и означает контакт с нулевой площадью на стадии проектирования. Предпочтительно все точечные контакты являются сингулярными точками.
Радиус любого из физических точечных контактных элементов, например, физических конических, сферических, сфероидальных, цилиндрических, пирамидальных по форме контактных элементов, должен лежать в диапазоне 0,01-5 мм, обычно размеры контактного радиуса лежат в диапазоне предпочтительно 0,1-1 мм.
Часть 3D-опорной поверхности, где устанавливается контакт с хирургическим шаблоном, предпочтительно является жесткой по характеру, например, представляет собой зуб или тому подобное. Варианты осуществления настоящего изобретения обеспечивают хирургические шаблоны, которые могут использоваться при размещении зубных имплантов или для выравнивания или уменьшения кости, или для обозначения, например, места хирургического вмешательства. Хирургический шаблон может представлять собой одноэлементный объект, где контактные элементы, направляющие элементы и корпус представляют собой единое целое, или контактные элементы и направляющие элементы устанавливаются в корпус хирургического шаблона. Регулируемые контактные элементы, например, имеющие винт, могут быть ввинчены посредством прямого или углового доступа к винту.
Особенно предпочтительный вариант осуществления хирургического шаблона представляет собой хирургический шаблон, имеющий по меньшей мере шесть неподвижных, то есть "локаторных" контактных элементов, и по меньшей мере 1 активный, то есть "фиксирующий", контактный элемент.
Варианты осуществления настоящего изобретения также относятся к программному обеспечению и способам и алгоритмам, используемым посредством этого программного обеспечения, которое 1) способствует определению набора из минимально 7 мест контактных точек на цифровом представлении 3D-опорной поверхности, которые удовлетворяют условию силового или геометрического замыкания, 2) цифровому конструированию хирургических шаблонов, включающих в себя ограниченный набор из по меньшей мере 7 контактных элементов, которые контактируют с опорной поверхностью на цифровом представлении посредством контакта "точка-площадь", например, в точечном контакте с нулевой площадью точно в указанных местах - и включающем в себя один или более направляющих элементов для хирургических инструментов, и корпус, не взаимодействующий с опорной поверхностью, который связывает эти контактные элементы и направляющие элементы.
Варианты осуществления настоящего изобретения также относятся к способу, использующемуся для изготовления хирургических шаблонов для зубных имплантов, при этом шаблоны имеют ограниченное число контактных элементов (например, менее 30, менее 20 или менее 15 и 7 или более), например, шаблоны соответствующие 3D-опорной поверхности, имеющие позиционирование силовым или геометрическим замыканием.
Варианты осуществления настоящего изобретения также относятся к способу установки хирургического шаблона на 3D-опорную поверхность, при этом шаблоны имеют ограниченное число указанных выделенных позиционированных контактных элементов (например, менее 30, менее 20 или менее 15 и более 7), устанавливаемых на 3D-опорную поверхность, имеющих позиционирование силовым или геометрическим замыканием.
Варианты осуществления настоящего изобретения также относятся к способу установки зубных имплантов с использованием указанного хирургического шаблона, имеющего ограниченное число контактных элементов (например, менее 30, менее 20 или менее 15 и более 7), которые контактируют с опорной поверхностью контактом "точка-площадь", например, точечным контактом с нулевой площадью, при этом шаблоны устанавливаются на 3D-опорную поверхности, имея позиционирование силовым или геометрическим замыканием.
Варианты осуществления настоящего изобретения включают в себя варианты того, каким способов осуществляется фиксация хирургического шаблона на 3D-опорной поверхности. Примеры различных фиксирующих механизмов могут представлять собой (но без ограничения): фиксацию посредством использования упорного винта(ов), фиксацию посредством защелкивания хирургического шаблона на 3D-опорной поверхности, фиксацию посредством первоначальной деформации хирургического шаблона, вызывающей внутреннее напряжение в хирургическом шаблоне, что приводит к фиксирующим силам в контактных элементах, фиксации посредством использования консоли(ей) и/или фиксацию посредством использования пружины (пружин).
Варианты осуществления настоящего изобретения включают в себя варианты материалов, используемых для корпуса, направляющих элементов и контактных элементов хирургического шаблона. Кроме того, корпус хирургического шаблона может содержать или состоять из сочетаний множества материалов. Конкретный вариант осуществления хирургического шаблона представляет собой одноэлементный хирургический шаблон, изготовленный из металла.
Варианты осуществления настоящего изобретения включают в себя варианты технологии, используемой для изготовления хирургического шаблона. Способы изготовления могут включать в себя способы послойного изготовления или более проще говоря, способ ʺаддитивного изготовленияʺ, способы фрезерования или ручной доводки или вырезания, или их сочетания. Конкретный вариант осуществления включает в себя хирургический шаблон, который включает в себя передающий элемент, который позволяет оборудованию с CNC выполнить фрезеровальные работы (например, фрезерование направляющего элемента, например, сверление отверстия цилиндрического вкладыша, и, например, фрезерование сферического по форме контактного элемента) в надлежащем месте относительно корпуса хирургического шаблона. Этот передающий элемент обеспечивает, что шаблон, созданный посредством аддитивного изготовления размещен внутри зажимного приспособления ( держателя детали для фрезерования) в заданном месте. Подходящие материалы для множества различных способов изготовления включают в себя:
SLM: Ti, Co-Cr, (нержaвеющая) сталь, серебро, золото, бронза, латунь, алюминий
SLA: эпоксидные смолы, акриловые смолы, акриловые эпоксидные смолы, TPA
FDM: ABS, поликарбонат, PPSU,
Фрезерование: металлы, уже упомянутые выше, ABS, ацеталь, акриловый полимер, POM, стеклонаполненный нейлон, нейлон, PEEK, фенольный полимер, PC, полиэтилен, полипропилен, полистирол, PTFE, PVC, PPS, полиамидный полимер, фторполимеры, PEI, фторуглеродные полимеры, стеклопластик на основе полимерной смолы, PPE, нейлон, сплав никеля, бериллиевая медь, железные сплавы
SLS: полиамид, стеклонаполненный полиамид, алюмид, огнестойкий полиамид, термопластический полиуретан
Струйная печать: акрилат, полимеры, виниловый полимер,
Вакуумное литье: полиуретан, TPE, ABS, PP, PC, PE
В одном аспекте настоящее изобретение обеспечивает хирургический шаблон для установки на 3D-опорную поверхность и опоры на 3D-опорную поверхность, при этом хирургический шаблон имеет, относительно по меньшей мере жесткой части 3D-опорной поверхности, набор из минимально 7 (семи) контактных элементов, которые контактируют с опорной поверхностью посредством контактов "точка-площадь", например, точечных контактов с нулевой площадью, при этом хирургический шаблон и 3D-опорная поверхность действуют совместно для достижения силового или геометрического замыкания, когда хирургический шаблон установлен на опорной поверхности. Точечные контакты могут представлять собой сферические, сфероидальные, цилиндрические, пирамидальные или конические контактные точки. Ограниченное число контактных элементов и силовое или геометрическое замыкание обеспечивают однозначное, точное и воспроизводимое размещение шаблона. Контактные элементы могут быть или пассивными локаторными контактными элементами, представленными на фиг. 5a-c, или активными фиксирующими контактными элементами, как представлено на фиг. 5d. Ограниченное число контактных элементов взаимодействует только с жесткой частью 3D-опорной поверхности.
Любое из нижеприведенного или любое сочетание нижеприведенного может быть использовано для достижения фиксирующего действия в одном или более контактных элементах: Фиксирующий механизм посредством временной деформации хирургического шаблона, так что один или более контактных элементов может быть защелкнут на жесткой части 3D-опорной поверхности, выполняя условие для геометрического замыкания, то есть шаблон уже не может быть удален с опорной поверхности ни в каком направлении любой внешней силой, если только опорная поверхность или шаблон не деформированы, или для силового замыкания.
a. Рычажный фиксирующий механизм для выполнения условия для геометрического замыкания, то есть шаблон больше не может быть удален с опорной поверхности ни в каком направлении посредством любой внешней силы, если только опорная поверхность или шаблон не деформирован, при этом деформация шаблона может включать в себя удаление, деформацию, перемещение рычажного фиксирующего контактного элемента, или для силового замыкания.
b. Пружинный фиксирующий механизм для выполнения условия для геометрического замыкания, то есть шаблон больше не может быть удален с опорной поверхности ни в каком направлении посредством любой внешней силы, если только опорная поверхность или шаблон не деформированы, при этом деформация шаблона может включать в себя удаление, деформацию, перемещение пружинного контактного элемента, или для силового замыкания.
c. Винтовой фиксирующий механизм со сферическим по форме кончиком для выполнения условия для геометрического замыкания, то есть шаблон больше не может быть удален с опорной поверхности ни в каком направлении посредством любой внешней силы, если только опорная поверхность или шаблон не деформированы, при этом деформация шаблона может включать в себя удаление, деформацию, перемещение пружинного фиксирующего контактного элемента.
Шаблон может представлять собой индивидуализированный хирургический шаблон для использования в облегчении установки зубного импланта, переноса меток, или уменьшения или выравнивания челюсти. Такой индивидуализированный хирургический шаблон может использоваться в облегчении подготовки остеотомии для зубного импланта и в размещении зубного импланта согласно предварительному операционному плану. Предварительный операционный план содержит изображения анатомических образований пациента, например, объемные сканированные изображения, выбранные из КТ или КЛКТ или МРТ, или оптические сканированные изображения, например, оптическое сканированное изображение лабораторной модели или внутриротовое сканированное изображение, и записанные в медицинских изображениях.
Хирургический шаблон может включать в себя направляющий элемент, обеспеченный в хирургическом шаблоне, для направления хирургического инструмента, используемого в остеотомии, или в переносе меток. Остеотомия может представлять собой костную полость или уменьшение или выравнивание кости. Например, направляющий элемент может представлять собой цилиндр или вкладыш, в который и посредством которого один или более хирургических компонентов или инструментов могут быть вставлены для приведения их в рабочее положение.
Один или более хирургических компонентов или инструментов могут представлять собой
одно или более сверл и/или инструментов для установки импланта, или держателей импланта, или
костный пьезотом для уменьшения или выравнивания челюсти, или
разметочное устройство для изготовления внутриротовой разметки при подготовке последующего хирургического вмешательства, в заданном положении.
В другом аспекте настоящего изобретения обеспечивается способ изготовления хирургического шаблона для установки на 3D-опорную поверхность и опоры на 3D-опорную поверхность, при этом хирургический шаблон имеет, относительно по меньшей мере жесткой части 3D-опорной поверхности, набор из минимально 7 контактных элементов, которые контактируют с опорной поверхностью посредством контактов "точка-площадь", например, точечных контактов с нулевой площадью, причем хирургический шаблон и 3D-опорная поверхность действуют совместно для достижения геометрического или силового замыкания, когда хирургический шаблон установлен на 3D-опорной поверхности, при этом указанный способ содержит этапы, на которых получают предварительный план операции, содержащий изображения анатомических образований пациента, полученных посредством способа объемного сканирования, выбранного из КТ или КЛКТ или МРТ или оптического сканирования, например, сканирования лабораторной модели или внутриротового сканирования, и записанных в медицинских изображениях, генерируют цифровую версию хирургического шаблона для установки на 3D-опорную поверхность
и опоры на 3D-опорную поверхность, предпочтительно жесткую 3D-опорную поверхность, обеспечивающую в хирургическом шаблоне набор из минимально 7 контактных элементов, которые контактируют с опорной поверхностью посредством контакта "точка-площадь", например, точечного контакта с нулевой площадью (например, сферического, сфероидального, конического, цилиндрического или пирамидального по форме) относительно по меньшей мере жесткой части 3D-опорной поверхности, и оценивают хирургический шаблон в отношении его способности действовать совместно с 3D-опорной поверхностью для достижения силового или геометрического замыкания, когда хирургический шаблон установлен на 3D-опорной поверхности; и изготавливают хирургический шаблон посредством послойного изготовления или отливки или фрезерования. Контактные элементы представляют собой или пассивные локаторные контактные элементы или активные фиксирующие контактные элементы. 3D-опорная поверхность соответствует анатомии полости рта человека или животного или их части, или их лабораторной копии.
Жесткая часть 3D-опорной поверхности может соответствовать части челюсти, естественному зубному ряду или зубной реставрации, съемному протезу, несъемному протезу, пломбе, виниру или тому подобному, или их лабораторной копии.
Лабораторная копия может представлять собой модель зубного ряда человека или животного или часть зубного ряда человека или животного, содержащую естественные зубы человека или животного или зубные реставрации, или костные структуры человека или животного, или челюсть. Лабораторная копия может быть изготовлена посредством послойного изготовления, или отливки, или фрезерования.
Способ может включать в себя этап образования любого из нижеприведенного или любое сочетание из нижеприведенного для достижения фиксирующего действия в еще одном из контактных элементов:
Фиксирующий механизм посредством временной деформации хирургического шаблона, так что один или более контактных элементов могут быть защелкнуты на поднутрении жесткой части 3D-опорной поверхности, выполняя условие для силового замыкания или геометрического замыкания,
Рычажный фиксирующий механизм для выполнения условия для силового замыкания или геометрического замыкания,
Пружинный фиксирующий механизм для выполнения условия для силового замыкания или геометрического замыкания,
Винтовой фиксирующий механизм для выполнения условия для силового замыкания, посредством которого, когда винт завинчен, может достигаться геометрическое замыкание.
Хирургический шаблон может быть изготовлен посредством любой из техник послойного изготовления, отливки и фрезерования, или их сочетания. Хирургический шаблон может быть подготовлен как индивидуализированный хирургический шаблон для использования в облегчении установки зубного импланта, переноса меток или уменьшения или выравнивания челюсти. Индивидуализированный хирургический шаблон может использоваться для облегчения подготовки остеотомии для зубного импланта и для установки зубного импланта согласно предварительному плану операции.
Предварительный план операции может быть подготовлен с помощью изображений анатомических образований пациента, представляющих собой объемные сканированные изображения, выбранные из КТ или КЛКТ или МРТ, или оптические сканированные изображения лабораторной модели или внутриротовое сканированное изображение, и записанные в медицинских изображениях.
Способ также включает в себя этап, на котором обеспечивают направляющий элемент в хирургическом шаблоне для направления хирургического инструмента при остеотомии, или при переносе меток. Остеотомия может представлять собой костную полость или уменьшение или выравнивание кости.
Направляющий элемент может обеспечиваться в виде цилиндра или вкладыша, в который и посредством которого вставляются один или более хирургических компонентов для приведения их в рабочее положение.
В другом аспекте настоящее изобретение обеспечивает способ выполнения остеотомии у пациента, способ содержит этапы, на которых: получают хирургический шаблон для установки на 3D-опорную поверхность и опоры на 3D-опорную поверхность, предпочтительно жесткую 3D-поверхность, при этом 3D-поверхность является частью челюсти, естественного зубного ряда, зубных реставраций, съемных протезов, несъемных протезов, пломб, виниров или тому подобного, причем хирургический шаблон имеет, относительно по меньшей мере жесткой части 3D-опорной поверхности, набор из минимально 7 контактных элементов, которые контактируют с опорной поверхностью посредством контактов "точка-площадь", например, точечных контактов с нулевой площадью, например, точечные контакты могут представлять собой сферические, сфероидальные, цилиндрические, пирамидальные или конические контактные точки, при этом хирургический шаблон и 3D-опорная поверхность действуют совместно для достижения силового или геометрического замыкания, когда хирургический шаблон установлен на 3D-опорную поверхность, при этом хирургический шаблон дополнительно содержит направляющую для направления хирургического инструмента, используемого при остеотомии, способ содержит этап, на котором: размещают хирургический шаблон на 3D-опорной поверхности и выполняют остеотомию посредством манипулирования хирургическим инструментом.
В другом аспекте настоящее изобретение обеспечивает систему для изготовления хирургического шаблона для установки на 3D-опорную поверхность и опоры на 3D-опорную поверхность, при этом хирургический шаблон имеет, относительно по меньшей мере жесткой части 3D-опорной поверхности, набор минимально из 7 контактных элементов, которые контактируют с опорной поверхностью посредством контакта "точка-площадь", например, точечного контакта с нулевой площадью, причем хирургический шаблон и 3D-опорная поверхность действуют совместно для достижения силового или геометрического замыкания, когда хирургический шаблон установлен на 3D-опорную поверхность, система содержит объемный сканер, выбранный из КТ или КЛКТ или МРТ сканера, или оптический сканер, например, сканированное изображения лабораторной модели или внутриротовое сканированное изображение и средство для записи сканированных медицинских изображений; компьютер для отображения изображений анатомических образований пациента на основе предварительного плана операции, и для генерирования цифровой версии хирургического шаблона для установки на цифровую версию 3D-опорной поверхности и опору на цифровую версию 3D-опорной поверхности, и для обеспечения цифровой версии хирургического шаблона набором из минимально 7 контактных элементов, которые контактируют с опорной поверхностью (ее цифровым представлением) посредством контакта "точка-площадь", например, точечного контакта с нулевой площадью, относительно по меньшей мере жесткой части 3D-опорной поверхности, и для оценивания хирургического шаблона в отношении его возможности действовать совместно с 3D-опорной поверхностью для достижения силового или геометрического замыкания, когда хирургический шаблон установлен на 3D-опорной поверхности; и устройство для послойного изготовления или отливки или фрезерования для изготовления хирургического шаблона. Точечные контакты могут представлять собой сферические, сфероидальные, цилиндрические, пирамидальные или конические контактные точки.
В другом аспекте настоящее изобретение обеспечивает компьютерный программный продукт, который, при исполнении процессорным механизмом, выполняет любой из способов по настоящему изобретению, например, как описано выше. Для хранения компьютерного программного продукта может использоваться энергонезависимый носитель информации.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1a представляет известный хирургический шаблон для установки импланта в ситуации частичного отсутствия зубов.
Фиг. 1b представляет поперечный разрез известного хирургического шаблона в положении направляющего вкладыша.
Фиг. 2 и 3 представляют поперечные разрезы известного хирургического шаблона в положении опоры на зубы.
Фиг. 4a представляет хирургический шаблон для установки импланта в ситуации частичного отсутствия зубов согласно варианту осуществления настоящего изобретения.
Фиг. 4b представляет нижнюю сторону хирургического шаблона согласно варианту осуществления настоящего изобретения, имеющего 6 локаторных контактных элементов и 1 фиксирующий контактный элемент, в котором фиксация достигается посредством использования упорного винта на 3D-опорной поверхности. Форма контактных элементов на этом чертеже сферическая и представляет только один частный вариант осуществления изобретения. Эти контактные элементы будут контактировать с опорной поверхностью посредством контакта "точка-площадь", например, точечного контакта с нулевой площадью в местах, которые заданы математическим алгоритмом, оценивающим условие силового или геометрического замыкания. Для этой оценки алгоритм использует пространственное положение (3D-координаты) на 3D-опорной поверхности, а также направления нормали к цифровому представлению опорной поверхности в этих положениях. Для уверенности, что контактные элементы хирургического шаблона точно контактируют с 3D-опорной поверхностью в этих положениях, контактные элементы следует проектировать так, чтобы они обеспечивали контакт "точка-площадь", то есть точечный контакт с нулевой площадью. Например, для сферических по форме контактных элементов центр этой сферы располагается программой проектирования шаблона вдоль направления, нормального к опорной поверхности в этих местах. На этой линии центр сферы располагается на расстоянии от 3D-опорной поверхности, которое в точности равно выбранному радиусу этой контактной сферы. В результате хирургический шаблон встречается с 3D-опорной поверхностью в сингулярной точке, то есть поверхность контактной сферы не пересекается с цифровым представлением 3D-опорной поверхности и не находится на расстоянии от опорной поверхности.
Фиг. 4c представляет хирургический шаблон для установки импланта в ситуации частичного отсутствия зубов согласно варианту осуществления настоящего изобретения в положении направляющего вкладыша.
Фиг. 5a-d представляет поперечный разрез дополнительных хирургических шаблонов согласно дополнительным вариантам осуществления настоящего изобретения, которые находятся в контакте с 3D-опорной поверхностью посредством сферических по форме (например, с трением или без трения) контактных элементов. В этих вариантах осуществления 2D-поперечные разрезы хирургического шаблона имеют геометрическое замыкание относительно 2D-поперечного сечения 3D-опорной поверхности, образованной зубами в 2-мерном пространстве, т.е. в плоскости. Для достижения геометрического замыкания в 2D-пространстве вовлекаются по меньшей мере 4 контактных элемента, аналогично минимально 7 контактных элементов вовлекаются для достижения геометрического замыкания в 3D-пространстве. Фиг. 5a представляет сфероидальный контактный элемент, фиг. 5b представляет острое ребро или острый точечный контактный элемент, фиг. 5c представляет контактный элемент в сборе, который может быть изготовлен из упругого материала, а фиг. 5d представляет винтовой фиксирующий контактный элемент.
Фиг. 6 представляет регулировку контактного элемента, как представлено на фиг. 5d, при этом фиксация достигается посредством использования упорного винта на 3D-опорной поверхности. Возможно, что условие для геометрического замыкания требует, чтобы направление и положение фиксирующего контактного элемента находилось в труднодоступной области полости рта пациента. Следовательно, головка винта упорного винта может быть спроектирована так, чтобы вмещать гексалобулярную отвертку, которая обеспечивает затягивание упорного винта, когда отвертка ориентирована в направлении, отличном от направления упорного винта, например, обеспечивая установку отвертки в более удобном положении в полости рта при сохранении функциональный возможности затягивания упорного винта.
Фиг. 7 представляет последовательность действий по лечению с применением импланта с помощью направляемого хирургического вмешательства согласно варианту осуществления настоящего изобретения.
Фиг. 8 представляет способ конструирования хирургического шаблона согласно варианту осуществления настоящего изобретения.
ОПРЕДЕЛЕНИЯ
Позиционирование силовым замыканием хирургического шаблона представляет собой зажимание хирургического шаблона на указанной 3D-опорной поверхности, предпочтительно жесткой 3D-опорной поверхности, в результате чего любое движение хирургического шаблона относительно 3D-опорной поверхности, предпочтительно жесткой 3D-опорной поверхности, встречает сопротивление со стороны контактной силы, что означает, что 3D-опорная поверхность, предпочтительно жесткая 3D-опорная поверхность, не может нарушить контакт с контактными элементами без некоторой ненулевой внешней работы.
Позиционирование геометрическим замыканием представляет собой более точное применение зажимания силовым замыканием в том смысле, что 3D-опорная поверхность, предпочтительно жесткая 3D-опорная поверхность, не может нарушить контакт с контактными элементами независимо от величины и направления какой-либо внешней недеформирующей работы. Геометрическое замыкание представляет собой состояние, при котором хирургический шаблон не может быть удален с 3D-опорной поверхности ни в каком направлении посредством какой-либо внешней силы, действующей на шаблон, то есть, любого сочетания величины силы и направления силы и места приложения силы, без деформирования 3D-опорной поверхности или без деформирования хирургического шаблона, при этом последнее включает в себя изменение положения контактных элементов относительно корпуса хирургического шаблона, а силовое замыкание представляет собой зажимание хирургического шаблона на 3D-опорной поверхности, при этом произвольные силы и моменты могут воздействовать на 3D-опорную поверхность посредством геометрической конструкции набора контактных элементов, и любое движение хирургического шаблона относительно 3D-опорной поверхности встречает сопротивление со стороны контактной силы, так что 3D-опорная поверхность не может нарушить контакт с набором контактных элементов без некоторой ненулевой внешней работы.
"Контакты ʺточка-площадь". Зубной техник и стоматолог обнаруживают различные контакты в полости рта и зубной дуге. Они включают в себя:
контакты "точка-точка",
контакты "точка-площадь",
контакты "ребро-ребро,
контакты "ребро-площадь",
контакты "площадь-площадь".
Точечные контакты при использовании в настоящем изобретении представляют собой контакты "точка-площадь". Специалист в данной области техники, следовательно, обнаруживает, что точечные контакты при использовании в настоящем изобретении соответствуют знаниям зубного техника и стоматолога. Это могут быть сферические, сфероидальные, конические, цилиндрические или пирамидальные по форме точечные контакты или аналогичные контакты.
ʺКонтакты с "нулевой площадьюʺ означают точечный контакт размером 0 мм² при цифровом проектировании, то есть на стадии проектирования. Физическая площадь контакта такого точечного контакта может быть вычислена посредством аппроксимации с использованием модели Герца из классической механики точечных контактов. В результате, например, хирургический шаблон встречается с 3D-опорной поверхностью для контактной точки предпочтительно в сингулярной точке, то есть поверхность спроектированной цифровым способом контактной точки не проникает в цифровое представление 3D-опорной поверхности, предпочтительно жесткой 3D-опорной поверхности, на стадии проектирования, и не находится на расстоянии от цифрового представления 3D-опорной поверхности, предпочтительно жесткой 3D-опорной поверхности.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение описано в отношении конкретных вариантов осуществления и со ссылкой на некоторые чертежи, но изобретение ими не ограничивается, а ограничивается только формулой. Описанные чертежи являются только схематическими и неограничивающими. Использование термина "содержащий" в описании и формуле не исключает другие элементы или этапы. Кроме того, термины "первый", "второй", "третий" и тому подобные в описании и в формуле используются для различия между подобными элементами, и необязательно для описания последовательностного или хронологического порядка. Следует понимать, что используемые таким образом термины являются взаимозаменяемыми при надлежащих условиях, и что варианты осуществления изобретения, описанные в настоящем документе, могут работать в последовательностях, отличных от описанных или проиллюстрированных в настоящем документе.
В аспекте вариантов осуществления настоящего изобретения обеспечивается хирургический шаблон, который может использоваться для облегчения хирургической процедуры, например, установки зубных имплантов. Хирургический шаблон может размещаться на части анатомических образований пациента или на их лабораторной копии. Эти анатомические образования полости рта, которые поддерживают шаблон, здесь и далее называются 3D-опорной поверхностью. 3D-опорная поверхность, при использовании в настоящей заявке, относится к части анатомических образований пациента и/или протезов, прикрепленных к пациенту, то есть части внутри полости рта, например, зубам, установленным имплантам, несъемным или съемным протезам, коронкам или мостовидным протезам, или другим восстановительным элементам, пломбам, винирам, мягким тканям, например, десне десен или кости, или их лабораторной копии. 3D-опорная поверхность предпочтительно представляет собой жесткую поверхность. Жесткая поверхность может обеспечиваться частью внутри полости рта, например, частью анатомических образований пациента и/или протезами, прикрепленными к пациенту, например, зубам, установленным имплантам, несъемным или съемным протезам, коронкам или мостовидным протезам, или другим восстановительным элементам, пломбам, винирам или кости, или лабораторной копии любого из них, или лабораторной копии мягких тканей, например, десны десен. Лабораторная копия может использоваться, например, для проверки шаблона. Варианты осуществления настоящего изобретения обеспечивают хирургические шаблоны, которые могут использоваться при установке зубных имплантов или для выравнивания или уменьшения кости, или, например, для разметки места хирургического вмешательства. Хирургические шаблоны, имеющие ограниченное число контактных элементов (например, менее 30, менее 20 или менее 15 и 7 или более), снабжены специальным позиционированием, так что достигается позиционирование силовым замыканием или геометрическим замыканием хирургического шаблона на 3D-опорной поверхности, предпочтительно на жесткой 3D-опорной поверхности, при этом хирургический шаблон подготавливается согласно предварительному плану операции. Контактные элементы могут быть смонтированы на корпусе хирургического шаблона. Регулируемые контактные элементы, например, имеющие винт, могут ввинчены посредством прямого или углового доступа к винту.
Позиционирование силовым замыканием хирургического шаблона представляет собой зажимание хирургического шаблона на указанной 3D-опорной поверхности, предпочтительно жесткой 3D-опорной поверхности, в результате чего любое движение хирургического шаблона относительно 3D-опорной поверхности, предпочтительно жесткой 3D-опорной поверхности, испытывает противодействие со стороны контактной силы, что означает, что 3D-опорная поверхность, предпочтительно жесткая 3D-опорная поверхность, не может нарушить контакт с контактными элементами без некоторой ненулевой внешней работы. Позиционирование геометрическим замыканием представляет собой более жесткое применение зажимания силовым замыканием в том смысле, что 3D-опорная поверхность, предпочтительно жесткая 3D-опорная поверхность, не может нарушить контакт с контактными элементами независимо от величины и направления любой внешней недеформирующей работы. Позиционирование силовым замыканием хирургического шаблона достигается с помощью по меньшей мере 2 фрикционных контактов с мягкими пальцами или по меньшей мере 3 фрикционных контактов с жесткими пальцами, или по меньшей мере семи бесфрикционных контактов. Причина этого состоит в том, что зажимание с помощью двух контактов с жесткими пальцами вместо двух контактов с мягкими пальцами, не может генерировать вращательный момент или препятствовать вращательному моменту вокруг линии, соединяющей две точки контакта. Геометрическое замыкание может достигаться только с помощью по меньшей мере семи контактных элементов. Геометрическое замыкание может достигаться только с помощью бесфрикционных контактных элементов. Хирургический шаблон может включать в себя более семи контактных элементов, но эти дополнительные контактные элементы могут обеспечивать лучшую стабильность, даже если для достижения силового замыкания или геометрического замыкания было использовано меньшее их число. Контактные элементы не должны мешать друг другу, и, таким образом, максимальное число контактных элементов определяется размером 3D-опорной поверхности, предпочтительно жесткой 3D-опорной поверхности, которая покрыта корпусом хирургического шаблона, и размером контактных элементов. Это последнее может определяться посредством контактного радиуса, который должен лежать в диапазоне 0,01-5мм, обычно размеры контактного радиуса должны составлять предпочтительно 0,1-1мм. Для простоты будем считать, что хирургический шаблон имеет ограниченное число контактных точек, при этом минимальное и максимальное число контактных точек определяется, как описано выше (например, менее 30, менее 20 или менее 15, 7 или более). Особенно предпочтительный вариант осуществления хирургического шаблона представляет собой хирургический шаблон, имеющий шесть неподвижных, то есть "локаторных", контактных элементов, и 1 активный, то есть "фиксирующий", контактный элемент, при этом локаторные контактные элементы считаются почти бесфрикционными, а фиксирующий контактный элемент может быть фрикционным или бесфрикционным.
Варианты осуществления настоящего изобретения также относятся к программному обеспечению и способам и алгоритмам, используемым в этом программном обеспечении, которое способствует конструированию хирургических шаблонов для зубных имплантов, при этом шаблоны имеют ограниченное число контактных элементов, например, шаблоны, установленные на 3D-опорную поверхность, предпочтительно жесткую 3D-опорную поверхность, имеющие позиционирование силовым замыканием или геометрическим замыканием с помощью, например, менее 30, менее 20 или менее 15 контактных элементов, и 7 или более контактных элементов.
Варианты осуществления настоящего изобретения также относятся к способу, используемому для изготовления хирургических шаблонов для зубных имплантов, при этом шаблоны имеют ограниченное число контактных элементов (например, менее 30, менее 20 или менее 15, и 7 или более), например, шаблоны, установленные на 3D-опорную поверхность, предпочтительно жесткую 3D-опорную поверхность, имеют позиционирование силовым замыканием или геометрическим замыканием.
Варианты осуществления настоящего изобретения также относятся к способу установки хирургического шаблона на 3D-опорную поверхность, предпочтительно на жесткую 3D-опорную поверхность, при этом шаблоны имеют ограниченное число указанных специально размещенных контактных элементов (например, менее 30, менее 20 или менее 15 и более 7), установленных на 3D-опорную поверхность, предпочтительно жесткую 3D-опорную поверхность, имеющую позиционирование силовым замыканием или геометрическим замыканием.
Варианты осуществления настоящего изобретения включают в себя разновидности способов фиксации хирургического шаблона на 3D-опорной поверхности, предпочтительно на жесткой 3D-опорной поверхности. Примеры различных фиксирующих механизмов могут представлять собой (но не ограничиваться): фиксацию посредством использования фиксирующего винта(ов), фиксацию посредством защелкивания хирургического шаблона на 3D-опорной поверхности, предпочтительно на жесткой 3D-опорной поверхности, фиксацию посредством исходной деформации хирургического шаблона, генерирующей внутреннее напряжение в хирургическом шаблоне, что приводит к фиксирующим силам в контактных элементах, фиксации посредством использования рычага (ов), и/или фиксацию посредством использования пружины (пружин).
Варианты осуществления настоящего изобретения также относятся к способу установки зубных имплантов с использованием хирургического шаблона, имеющего ограниченное число контактных элементов (например, менее 30, менее 20 или менее 15, и семь или более), например, шаблонов, установленных на 3D-опорную поверхность, предпочтительно жесткую 3D-опорную поверхность, имеющих позиционирование силовым замыканием или геометрическое замыкание.
Варианты осуществления настоящего изобретения включают в себя разновидности материалов, используемых для корпуса, направляющих элементов и контактных элементов хирургического шаблона. Кроме того, корпус хирургического шаблона может содержать или состоять из сочетаний множества материалов. Конкретный вариант осуществления хирургического шаблона представляет собой одноэлементный хирургический шаблон, изготовленный из металла.
Варианты осуществления настоящего изобретения включают в себя разновидности технологии, используемой для изготовления хирургического шаблона. Способы изготовления могут включать в себя способы послойного изготовления или, проще говоря, ʺаддитивного изготовленияʺ, способами фрезерования или ручной доводки или вырезания, или их сочетанием. Подходящие материалы для множества различных способов изготовления определены ниже.
SLM: Ti, Co-Cr, (нержaвеющая) сталь, серебро, золото, бронза, латунь, алюминий
SLA: эпоксидные смолы, акриловые смолы, акриловые эпоксидные смолы, TPA
FDM: ABS, поликарбонат, PPSU,
Фрезерование: металлы, уже упомянутые выше, ABS, ацеталь, акриловый полимер, POM, стеклонаполненный нейлон, нейлон, PEEK, фенольный полимер, PC, полиэтилен, полипропилен, полистирол, PTFE, PVC, PPS, полиамидный полимер, фторполимеры, PEI, фторуглеродные полимеры, стеклопластик на основе полимерной смолы, PPE, нейлон, сплав никеля, бериллиевая медь, железные сплавы
SLS: полиамид, стеклонаполненный полиамид, алюмид, огнестойкий полиамид, термопластический полиуретан
Струйная печать: акрилат, полимеры, виниловый полимер,
Вакуумное литье: полиуретан, TPE, ABS, PP, PC, PE
В одном аспекте настоящее изобретение обеспечивает хирургический шаблон для установки на 3D-опорную поверхность и опоры на 3D-опорную поверхность, предпочтительно жесткую 3D-опорную поверхность. Хирургический шаблон имеет, относительно по меньшей мере жесткой части 3D-опорной поверхности, ограниченный набор фрикционных или бесфрикционных контактных элементов, при этом хирургический шаблон и 3D-опорная поверхность, предпочтительно жесткая 3D-опорная поверхность, действуют совместно для достижения силового замыкания или геометрического замыкания, когда хирургический шаблон установлен на 3D-опорную поверхность, предпочтительно на жесткую 3D-опорную поверхность. Ограниченное число контактных точек и геометрическое или силовое замыкание обеспечивает точное и воспроизводимое размещение шаблона. Контактные элементы могут представлять собой или пассивные локаторные контактные элементы, представленные на фиг. 5a-c, или активные фиксирующие контактные элементы, как представлено на фиг. 5d.
3D-опорная поверхность, предпочтительно жесткая 3D-опорная поверхность, соответствует анатомическим образованиям полости рта человека или животного или их части, или их лабораторной копии, например, части полости рта. 3D-опорная поверхность должна состоять из жестких компонентов, например, жесткая часть 3D-опорной поверхности предпочтительно соответствует части челюсти, естественному зубному ряду или зубной реставрации, съемному протезу, несъемному протезу, пломбе, виниру или тому подобному, или их лабораторной копии. Лабораторная копия может представлять собой модель зубного ряда человека или животного или часть зубного ряда человека или животного, содержащая естественные зубы человека или животного или зубные реставрации, костную структуру человека или животного, или челюсть. Лабораторная копия может быть изготовлена посредством аддитивного изготовления, или отливки, или фрезерования. Лабораторная копия позволяет зубному технику, который не имеет доступа к пациенту, повысить качество конструкции шаблона.
Любое из нижеприведенного или любое сочетание нижеприведенного может использоваться для достижения фиксирующего действия в еще одном из контактных элементов:
а) Фиксирующий механизм посредством временной деформации хирургического шаблона, так что один или более контактных элементов могут быть защелкнуты на поднутрении жесткой части 3D-опорной поверхности, выполняя условие для силового замыкания или геометрического замыкания,
b) Рычажный фиксирующий механизм для выполнения условия для силового замыкания или геометрического замыкания,
c) Пружинный фиксирующий механизм для выполнения условия для силового замыкания или геометрического замыкания,
d) Винтовой фиксирующий механизм для выполнения условия для силового замыкания, при котором, когда винт затянут, может достигаться геометрическое замыкание.
Хирургический шаблон может быть изготовлен посредством любой из техник аддитивного изготовления, отливки и фрезерования, или их сочетания. Шаблон может представлять собой индивидуализированный хирургический шаблон для использования в облегчении установки зубного импланта, переносе меток или уменьшении или выравнивании челюсти. Такой индивидуализированный хирургический шаблон может предназначаться для использования в облегчении подготовки остеотомии для зубного импланта и установки зубного импланта согласно предварительному плану операции. Предварительный план операции содержит изображения анатомических образований пациента, например, представляет собой объемные сканированные изображения, выбранные из КТ или КЛКТ или МРТ, или из оптических сканированных изображений, например, оптического сканированного изображения лабораторной модели, или внутриротового сканированного изображения, и записанных в медицинских изображениях.
Хирургический шаблон может включать в себя направляющий элемент, обеспеченный в хирургическом шаблоне, для направления хирургического инструмента, используемого в остеотомии или в переносе меток. Остеотомия может представлять собой костную полость или уменьшение или выравнивание кости. Например, направляющий элемент может представлять собой цилиндр или вкладыш, в который и посредством которого один или более хирургических компонентов или инструментов могут быть вставлены для приведения их в рабочее положение.
Указанный один или более хирургических компонентов или инструментов могут представлять собой
одно или более сверл и/или инструментов для установки импланта, или держателей импланта, или
костный пьезотом для уменьшения или выравнивания челюсти, или
разметочное устройство для изготовления внутриротовой разметки при подготовке последующего хирургического вмешательства в заданном положении.
В другом аспекте настоящего изобретения обеспечивается способ изготовления хирургического шаблона для установки на 3D-опорную поверхность и опоры на 3D-опорную поверхность, предпочтительно жесткую 3D-опорную поверхность, при этом хирургический шаблон имеет, относительно по меньшей мере жесткой части 3D-опорной поверхности, ограниченный набор из фрикционных или бесфрикционных контактных элементов, при этом хирургический шаблон и 3D-опорная поверхность, предпочтительно жесткая 3D-опорная поверхность, действуют совместно для достижения силового замыкания или геометрического замыкания, когда хирургический шаблон установлен на опорной поверхности, предпочтительно жесткой 3D-опорной поверхности. Способ содержит этапы, на которых получают предварительный план операции, содержащий изображения анатомических образований пациента, полученных посредством способа объемного сканирования, выбранного из КТ или КЛКТ или МРТ, или оптических сканированных изображений, например, сканированных изображений лабораторной модели или внутриротового сканированного изображения, и записанных в медицинских изображениях, генерируют цифровую версию хирургического шаблона для установки и опоры на 3D-опорную поверхность, предпочтительно жесткую 3D-опорную поверхность, обеспечивают в хирургическом шаблоне ограниченный набор фрикционных или бесфрикционных контактных элементов, относительно по меньшей мере жесткой части 3D-опорной поверхности, и оценивают хирургический шаблон в отношении его способности действовать совместно с 3D-опорной поверхностью, предпочтительно жесткой 3D-опорной поверхностью, для достижения силового замыкания или геометрического замыкания, когда хирургический шаблон установлен на 3D-опорной поверхности, предпочтительно жесткой 3D-опорной поверхности; и изготавливают хирургический шаблон посредством аддитивного изготовления, или отливки, или фрезерования. Контактные элементы представляют собой или пассивные локаторные контактные элементы, или активные фиксирующие контактные элементы. 3D-опорная поверхность, предпочтительно жесткая 3D-опорная поверхность, соответствует анатомическим образованиям полости рта человека или животного, или их части, например, части полости рта, или их лабораторной копии.
Жесткая часть 3D-опорной поверхности может соответствовать части челюсти, естественного зубного ряда или зубной реставрации, съемному протезу, несъемному протезу, пломбе, виниру или тому подобному, или их лабораторной копии, например, лабораторной копии десен или десны.
Лабораторная копия может представлять собой модель зубного ряда человека или животного, или части зубного ряда человека или животного, содержащей естественные зубы или зубные реставрации человека или животного, или костную структуру человека или животного, или челюсть. Лабораторная копия может изготавливаться посредством аддитивного изготовления, или отливки, или фрезерования.
Способ может включать в себя этап, на котором образуют любое из следующего или любое сочетание из следующего для достижения фиксирующего действия в еще одном из контактных элементов:
Фиксирующий механизм посредством временной деформации хирургического шаблона, так что один или более контактных элементов может быть защелкнут на области поднутрения жесткой части 3D-опорной поверхности, выполняя условие для силового замыкания или геометрического замыкания.
Рычажный фиксирующий механизм для выполнения условия для силового замыкания или геометрического замыкания,
Пружинный фиксирующий механизм для выполнения условия для силового замыкания или геометрического замыкания,
Винтовой фиксирующий механизм для выполнения условия для силового замыкания, в результате чего, когда винт затянут, может достигаться геометрическое замыкание.
Хирургический шаблон может изготавливаться посредством любой из техник аддитивного изготовления, отливки и фрезерования, или их сочетания. Хирургический шаблон может быть подготовлен как индивидуализированный хирургический шаблон для использования в облегчении установки зубного импланта, переносе меток или уменьшении или выравнивании челюсти. Индивидуализированный хирургический шаблон может быть предназначен для использования в облегчении подготовки остеотомии для зубного импланта и установки зубного импланта согласно предварительному плану операции.
Предварительный план операции может быть подготовлен с помощью изображений анатомических образований пациента, являющихся объемными сканированными изображениями, выбранными из КТ или КЛКТ или МРТ, или оптическими сканированными изображениями, например, сканированным изображением лабораторной модели или внутриротовым сканированным изображением, и записанными в медицинских изображениях.
Способ также включает в себя этап, на котором обеспечивают направляющий элемент в хирургическом шаблоне для направления хирургического инструмента, используемого в остеотомии или в переносе меток. Остеотомия может представлять собой костную полость или уменьшение или выравнивание кости.
Направляющий элемент может обеспечиваться в виде цилиндра или вкладыша, в который и посредством которого один или более хирургических компонентов вставляются для приведения их в рабочее положение.
В другом аспекте настоящее изобретение обеспечивает способ выполнения остеотомии у пациента, способ содержит этапы, на которых: получают хирургический шаблон для установки на 3D-опорную поверхность и опоры на 3D-опорную поверхность, при этом 3D-поверхность представляет собой часть челюсти, естественного зубного ряда, зубных реставраций, съемных протезов, несъемных протезов, пломб, виниров или тому подобного, то есть предпочтительно жесткую 3D-опорную поверхность, причем хирургический шаблон имеет, относительно по меньшей мере жесткой части 3D-опорной поверхности, ограниченный набор из фрикционных или бесфрикционных контактных элементов, при этом хирургический шаблон и 3D-опорная поверхность, предпочтительно жесткая 3D-опорная поверхность, действуют совместно для достижения силового замыкания или геометрического замыкания, когда хирургический шаблон установлен на 3D-опорную поверхность, предпочтительно жесткую 3D-опорную поверхность, дополнительно содержащую направляющую для направления хирургического инструмента, используемого в остеотомии, указанный способ содержит этапы, на которых: помещают хирургический шаблон на 3D-опорную поверхность, предпочтительно жесткую 3D-опорную поверхность, и выполняют остеотомию посредством манипулирования хирургическим инструментом.
В другом аспекте настоящее изобретение обеспечивает систему для изготовления хирургического шаблона для установки на 3D-опорную поверхность и опоры на 3D-опорную поверхность, предпочтительно жесткую 3D-опорную поверхность, при этом хирургический шаблон имеет, относительно по меньшей мере жесткой части 3D-опорной поверхности, ограниченный набор фрикционных или бесфрикционных контактных элементов, причем хирургический шаблон и 3D-опорная поверхность, предпочтительно жесткая 3D-опорная поверхность, действуют совместно для достижения силового замыкания или геометрического замыкания, когда хирургический шаблон устанавливается на 3D-опорную поверхность, предпочтительно жесткую 3D-опорную поверхность. Система содержит объемный сканер, выбранный из КТ или КЛКТ или МРТ сканера, или оптический сканер, например, сканированное изображение лабораторной модели или внутриротовое сканированное изображение, и средство для записи сканированных медицинских изображений; компьютер для отображения изображений анатомических образований пациента на основе предварительного плана операции, и для генерирования цифровой версии хирургического шаблона для установки на 3D-опорную поверхность и опоры на 3D-опорную поверхность, предпочтительно на жесткую 3D-опорную поверхность, и для обеспечения в хирургическом шаблоне ограниченного набора фрикционных или бесфрикционных контактных элементов относительно по меньшей мере жесткой части 3D-опорной поверхности, и для оценки хирургического шаблона в отношении его способности действовать совместно с 3D-опорной поверхностью, предпочтительно жесткой 3D-опорной поверхностью, для достижения силового замыкания или геометрического замыкания, когда хирургический шаблон установлен на 3D-опорной поверхности, предпочтительно на жесткой 3D-опорной поверхности; и устройство для аддитивного изготовления, или отливки, или фрезерования для изготовления хирургического шаблона.
В другом аспекте настоящее изобретение обеспечивает компьютерный программный продукт, который, при исполнении его на устройстве обработки, выполняет любой из способов по настоящему изобретению, например, как изложено выше. Для хранения компьютерного программного продукта может использоваться энергонезависимый носитель информации.
Перед подробным описанием вариантов осуществления настоящего изобретения описаны этапы установки зубного импланта с использованием компьютерно направляемого хирургического вмешательства, как проиллюстрировано на фиг. 7, которые относятся к вариантам осуществления настоящего изобретения. Эти этапы могут быть включены как часть вариантов осуществления настоящего изобретения. Цель установки импланта состоит в обеспечении пациенту зубной реставрации, которая может фиксироваться к челюсти посредством этих имплантов. Варианты осуществления настоящего изобретения относятся к зубной имплантологии, и, в частности, к проектированию, изготовлению и использованию хирургических шаблонов, например, для направления хирургических инструментов, например, сверл и имплантоводов, в положение, которое было, например, определено в предварительном плане операции.
Входные данные для предварительного плана операции представляют собой одно или более изображений, полученных из объемного сканированного изображения, например, традиционного или конусно-лучевого (КЛ) сканированного изображения, компьютерно-томографического (КТ) сканированного изображения, или МРТ-сканированного изображения анатомических образований пациента, например, челюсти и зубного ряда, с необязательными другими типами сканированных изображений, например, оптическим сканированным изображением лабораторной модели или внутриротовым оптическим сканированным изображением, или внеротовым оптическим КТ или МРТ сканированным изображением. Из одного или более сканированных изображений получается оцифровка анатомических образований пациента, например, зубного ряда, например, посредством использования программного обеспечения и традиционных техник, известных специалисту в данной области техники. В предварительном плане операции объединяются оцифровки анатомических образований пациента, например, кости и зубного ряда, и зубной хирург или стоматолог планируют виртуальное положение имплантов в их оптимальном или наилучшем из возможных клиническом и необязательно эстетическом положении, или получают и пересматривают предварительный план операции, полученный от третьей стороны. Зубной хирург или стоматолог затем указывает тип 3D-опорной поверхности, на которую необходимо опереть хирургический шаблон, и тип хирургических инструментов, которые будут использоваться с хирургическим шаблоном, что, в свою очередь, будет определять положение и размер направляющих элементов хирургического шаблона.
Как только окончательно завершен предварительный план операции, включающий в себя планирование виртуального импланта и рекомендации относительно хирургического шаблона, программное обеспечение используется специалистом в данной области техники, чтобы обеспечить цифровое проектирование хирургического шаблона. Далее этот хирургический шаблон изготавливается и посылается зубному хирургу, который будет выполнять хирургическое вмешательство с имплантом. Во время хирургического вмешательства хирургический шаблон устанавливается на 3D-опорной поверхности во рту пациента. Что касается любого варианта осуществления настоящего изобретения, шаблон может также накладываться на лабораторные копии опорной поверхности в полости рта. Такая лабораторная копия может изготавливаться посредством, например, аддитивного изготовления, или отливки, или фрезерования.
Хирургические шаблоны согласно вариантам осуществления настоящего изобретения устанавливаются на 3D-опорную поверхность в полости рта пациента, и 3D-опорная поверхность может представлять собой a) один или более зубов пациента, или b) реставрации, например, несъемные или съемные протезы, мостовидные протезы, пломбы, виниры, или c) челюсть или d) мягкие ткани, например десну, или любое сочетание перечисленного.
Во время хирургического вмешательства остеотомия проводится перед хирургической процедурой, например, установкой импланта в челюсти. Для вариантов осуществления настоящего изобретения, например, в которых выполняется или может быть применено компьютерно направляемое хирургическое вмешательство, цель состоит в создании остеотомии и
a) установке импланта эффективно или насколько возможно точно согласно предварительному плану операции, или
b) разметке положения, где должен выполняться хирургический этап,
c) уменьшении или выравнивании челюстного края или создании полости.
В таких вариантах осуществления создается хирургический шаблон, который будет направлять один или более хирургических инструментов, например,
a) одно или более сверл и/или инструментов для установки импланта, или держателей импланта, или
b) костный пьезотом для уменьшения или выравнивания челюсти, или
c) разметочное устройство для изготовления внутриротовой разметки при подготовке последующего хирургического вмешательства, в заданном положении.
Варианты осуществления настоящего изобретения могут иметь одну или более следующих характеристик:
Хирургические шаблоны, которые являются вариантами осуществления настоящего изобретения, включают в себя сферические, конические, пирамидальные или цилиндрические по форме элементы, образующие контактные элементы ограниченного размера, обеспечивающие отдельные механические взаимодействия с 3D-опорной поверхностью, предпочтительно жесткой 3D-опорной поверхностью, а не непрерывные площади контакта.
Хирургические шаблоны, которые являются вариантами осуществления настоящего изобретения, включают в себя контактные элементы, которые находятся в контакте только с жесткими частями 3D-опорной поверхности, что обеспечивает уникальный, стабильный и точно размещаемый при повторной установке шаблон.
Хирургические шаблоны, которые являются вариантами осуществления настоящего изобретения, могут включать в себя фиксирующие контактные элементы, которые в свою очередь могут включать в себя фиксацию посредством упорных винтов, имеющих угловой доступ, например, посредством использования гексалобулярных винтов и отвертки.
Хирургические шаблоны, которые представляют собой варианты осуществления настоящего изобретения, включают в себя сферические, сфероидальные, конические, цилиндрические или пирамидальные по форме контактные элементы (то есть линейные или точечные контакты, но не протяженные по площади контакты), которые представляют собой позиционирование силовым замыканием или, более предпочтительно, геометрическим замыканием, каждое из которых может обеспечивать шаблон, имеющий стабильное и точно воспроизводимое позиционирование.
Хирургические шаблоны, которые включают в себя контактные элементы, которые могут быть установлены на корпус хирургического шаблона, таким образом, обеспечивая использование различных материалов, и тем самым обеспечивая различные функциональные свойства контактных элементов.
Хирургический шаблон согласно вариантам осуществления настоящего изобретения предпочтительно включает в себя один или более направляющих элементов, обычно цилиндр или вкладыш, или направляющую поверхность, для направления одного или более хирургических инструментов в положение и ориентацию, которая была запланирована в предварительном плане операции. На фиг. 4a представлен хирургический шаблон 10 согласно вариантам осуществления настоящего изобретения для случая частичного отсутствия зубов, при этом хирургический шаблон 10 опирается на 3D-опорную поверхность, содержащую, например, зубы 4, соседние или расположенные близко к одному или более местам хирургического вмешательства, например, 6.Они представляют собой одно или более мест, где может выполняться хирургическая процедура, например, должна выполняться остеотомия и размещаться имплант. Зубы 4 образуют часть жесткой 3D-опорной поверхности, на которой хирургический шаблон согласно вариантам осуществления настоящего изобретения будет лежать при силовом замыкании или геометрическом замыкании. Некоторые из зубов 2 не участвуют в поддержке хирургического шаблона 10. Восстановительные элементы, например, несъемные или съемные протезы, мостовидные протезы или коронки, пломбы или виниры, или кость, когда она обнажена или доступна через десну, могут также образовывать часть жесткой 3D-опорной поверхности. Необязательно, мягкие ткани 7, например, десна, могут использоваться для опоры части шаблона 10 в дополнение к жестким частям. Шаблон 10 содержит одну или более опорных секций 11 и имеет один или более направляющих элементов, например, цилиндр или вкладыш 14, имеющие отверстие 12, которое/которые подлежат использованию для направления одного или более хирургических инструментов, например, сверл. Шаблон 10 в целом будет включать в себя по меньшей мере две опорные секции 11 и направляющий элемент, который занимает одно или более мест хирургического вмешательства. На фиг. 4a направляющий элемент, представляющий собой цилиндр 14, имеющий отверстие 12, объединен (выполнен единым элементом) с корпусом хирургического шаблона 10, и может изготавливаться из того же материала, например, особенно, для металлических шаблонов. Альтернативным, но менее предпочтительным, является вставка или вделка или монтаж направляющего элемента, например, цилиндра 14, в корпус хирургического шаблона 10. Этот направляющий элемент представлен в виде цилиндра 14, в который требуется вставить сверло сверху (или снизу для верхней челюсти). Однако цилиндр или вкладыш 14 может быть вырезан с одной стороны для обеспечения введения хирургического инструмента, например, сверла, сбоку, Это может использоваться, когда существует недостаточная высота в полости рта для вставки сверла сверху (или снизу для верхней челюсти). Варианты осуществления настоящего изобретения предусматривают встроенные (единым элементом с шаблоном), вделанные или вмонтированные в корпус хирургического шаблона 10 направляющие элементы.
Фиг. 4c представляет схематический поперечный разрез хирургического шаблона 10, соответствующий вариантам осуществления настоящего изобретения, в положении, когда направляющий элемент (обычно цилиндр или вкладыш 14) встроен или вделан в корпус шаблона 10. Варианты осуществления настоящего изобретения предусматривают или встроенные, или вделанные, или вмонтированные в корпус хирургического шаблона 10 направляющие элементы, но предпочтительным является встроенный (единый с шаблоном и изготовленный из одного материала элемент) направляющий элемент, особенно для металлических шаблонов. Вмонтированный в корпус хирургического шаблона 10 направляющий элемент, например, цилиндр 14, может иметь вид вкладыша и может быть изготовлен из материала, отличного от материала хирургического шаблона 10. Например, шаблон 10 может быть изготовлен из пластика, например, может быть акриловым, а цилиндр 14 может иметь вид металлического вкладыша. Направляющий цилиндр 14 располагается в таком боковом и вертикальном положении и под таким углом, что он будет направлять один или более хирургических инструментов (например, как указано зубным хирургом или стоматологом в предварительном плане операции) в запланированном перед операцией положении 6 остеотомии и импланта. На фиг. 4c представлено пространство 8 между десной 7 в положении 6, где должен размещаться имплант и нижней частью цилиндра или вкладыша 14. Это пространство 8 является необязательным и может быть исключено посредством продолжения направляющего элемента, например, цилиндра или вкладыша 14, вниз до десны 7, но его наличие обеспечивает следующие преимущества:
a) оно обеспечивает лучший обзор места 6 импланта, чем традиционный шаблон.
b) оно обеспечивает возможность хорошего орошения хирургического инструмента, например, сверла, при операции, например, при сверлении отверстия в челюсти, в которое будет устанавливаться имплант.
c) оно обеспечивает достаточное место, так что может быть выполнена безлоскутная процедура или процедура с мини-лоскутами.
3D-опорная поверхность хирургического шаблона 10 согласно любому из вариантов осуществления настоящего изобретения может представлять собой один или более зубов, реставрацию или реставрационный элемент, например, несъемный или съемный протез, мостовидный протез или коронку, пломбу или винир, кость, например, челюстную кость, обнаженную посредством откидывания лоскута мягких тканей, или мягкие ткани, например, десны, или их сочетание. Хирургические шаблоны 10 для установки в полости рта зубного импланта, которые являются вариантами осуществления настоящего изобретения, не требуют, чтобы корпус хирургического шаблона 10 представлял собой негативное изображение 3D-опорной поверхности. Один, несколько или все варианты осуществления настоящего изобретения обеспечивают хирургические шаблоны 10, в которых позиционирование хирургического шаблона 10 на его 3D-опорной поверхности является однозначным и воспроизводимым, то есть они вставляются в рот, удаляются и вставляются заново в одном и том же положении с одной и той же ориентацией.
Варианты осуществления настоящего изобретения достигают позиционирования на 3D-опорной поверхности посредством обеспечения ограниченного числа отдельных контактных элементов 20 (например, менее 30, менее 20 или менее 15 и более 7), например, на опорной секции 11, в сочетании с промежутком между 3D-опорной поверхностью и хирургическим шаблоном. Промежуток не допускает контакта корпуса шаблона с 3D-опорной поверхностью, таким образом, оставляя только заданное ограниченное число контактных элементов 20 (например, менее 30, менее 20 или менее 15 и более 7) для соприкосновения с 3D-опорной поверхностью и опоры шаблона при силовом или геометрическом замыкании. На фиг. 4b представлено множество выпуклых контактных элементов 21, 22, 23, 24, 25, 26 вместо одного или более большого по площади контакта(ов), как представлено на фиг. 2 и 3. Фиг. 4b также представляет деформируемый контактный элемент 20, например, винтовую фиксацию или зажим 27. Деформируемые контактные элементы для использования в вариантах осуществления настоящего изобретения включают в себя те, в которых положение контактной поверхности может регулироваться с помощью инструмента, например, регулирующего винта. Такие элементы также могут представлять собой упругие контактные элементы, например, изготовленные из пластика, резины или эластомера, или могут быть жесткими. Эластомеры могут представлять собой, например, изопрен, полиизопрен или другую синтетическую резину. Преимущество наличия ограниченного числа контактных элементов 20 по сравнению с наличием полного контакта между хирургическим шаблоном и 3D-опорной поверхностью состоит в том, что вероятность наличия некорректного или нестабильного позиционирования хирургического шаблона выше в случае хирургического шаблона, поддерживаемого полным контактом или протяженным по площади контактом, поскольку каждая отдельная контактная точка при контакте по всей площади может быть источником некорректного позиционирования (если изготовлены неправильно), при этом она ниже для вариантов осуществления настоящего изобретения. Контактные элементы 20 в соответствии с вариантами осуществления настоящего изобретения представляют собой выпуклые конструкции, например, сфероидальные, сферические, конические, пирамидальные, цилиндрические, острое ребро или острую точку, бочкообразные или усеченные сфероидальные, сферические, цилиндрические, бочкообразные контактные элементы или острые ребра или острые точки. Контактные элементы 20 могут быть трансгингивальными, то есть такими, что контактный элемент 20 может проникать через десну и может поддерживаться подлежащей костью, но предпочтительно не являются инвазивными для этой кости. Контактные элементы предпочтительно представляют собой контакты "точка-площадь". Контактные элементы могут представлять собой сферические, сфероидальные, конические, пирамидальные или цилиндрические по форме точечные контакты. Контактные элементы могут представлять собой контакты с нулевой площадью.
Контактные элементы 20 могут быть механически обработаны, сформованы, вделаны или вмонтированы в корпус хирургического шаблона 10, и могут изготавливаться из того же материала, что и корпус хирургического шаблона 10, или из материала, отличного от материала корпуса хирургического шаблона 10, при сборке. Примеры различных форм контактных элементов представлены на фиг. 5a, 5b, 5c. Фиг. 5a отображает встроенный (изготовленный единым целым с шаблоном), например, вделанный сфероидальный контактный элемент 20a. Контактный элемент 20a может быть образован из того же материала, что и шаблон 10, и, таким образом, может изготавливаться из жесткого материала. При способах аддитивного изготовления может использоваться более одного материала, так что материал контактного элемента 20a может отличаться от материала шаблона 10, когда шаблон изготавливается посредством аддитивного изготовления, и, таким образом, элемент 20a может быть, например, более упругим, чем материал шаблона. Контактный элемент 20b может быть выполнен регулируемым, то есть он может монтироваться с помощью винтовой резьбы в резьбовом участке шаблона 10. Фиг. 5b представляет встроенный (изготовленный единым целым с шаблоном) или вделанный контактный элемент 20b с острым ребром или острой точкой. Контактный элемент 20b может быть образован из того материала, что и шаблон 10, и, таким образом, может быть изготовлен из жесткого материала. При способах аддитивного изготовления может использоваться более одного материала, так что материал контактного элемента 20b может отличаться от материала шаблона 10, и, таким образом, элемент 20b может быть, например, более упругим, чем материал шаблона,. Контактный элемент 20b может быть выполнен регулируемым, то есть он может монтироваться с помощью винтовой резьбы в резьбовом участке шаблона 10. Контактный элемент 20b может иметь острую точку, которая проникает в десну, образуя трансдесневой контактный элемент, опирающийся на подлежащую кость, но без проникновения в кость. Трансдесневой контактный элемент 20b может быть выполнен регулируемым, то есть может устанавливаться с помощью винтовой резьбы в резьбовом участке шаблона 10. Фиг. 5c изображает собранный контактный элемент 20c, который может быть изготовлен из того же материала, что и корпус хирургического шаблона 10, или материала, отличного от материала корпуса хирургического шаблона 10, и может, следовательно, быть более упругим, чем шаблон 10, например, может быть изготовлен из пластика, резины или эластомера. Пластик может представлять собой акриловый полимер, эластомер/резина может представлять собой изопрен, полиизопрен или другую синтетическую резину. Контактный элемент 20c может представлять собой прессовую посадку в щель или отверстие в шаблоне, защелкивающуюся вставку в щель или отверстие шаблона, фиксированную на месте с помощью, например, адгезива или посредством пайки или сварки.
Фиг. 5d представляет регулируемый контактный элемент 20d, который может быть изготовлен из того же материала, что и корпус хирургического шаблона 10, или материала, отличного от материала корпуса хирургического шаблона 10, и может, таким образом, быть более упругим, чем шаблон 10, например, может быть изготовлен из пластика, резины или эластомера. Контактный элемент 20d может устанавливаться с помощью винтовой резьбы 34 в резьбовом участке шаблона 10. Опирающийся конец контактного элемента 20d может быть любым из уже описанных, например, выпуклой структурой, например, сфероидальным, сферическим, цилиндрическим, в виде острого ребра или острой точки, бочкообразным или усеченным сфероидальным, сферическим, цилиндрическим, бочкообразным контактным элементом или контактным элементом в виде острого ребра или острой точки. Другой конец элемента может быть выполнен, например, в виде головки 35 винта для вмещения инструмента (см. фиг. 6) для регулирования положения элемента, например, посредством поворота винта. Контактный элемент 20d достигает фиксации посредством использования упорного винта 34 на 3D-опорной поверхности. Фиксирующий контактный элемент 20d может быть снабжен любыми из других контактных элементов (представленных как 31, 32, 33) фиг. 5a-c, например, выпуклой структурой, например, сфероидальным, сферическим, цилиндрическим, в виде острого ребра или острой точки, бочкообразным или усеченным сфероидальным, сферическим, цилиндрическим, бочкообразным контактным элементом или контактным элементом в виде острого ребра или острой точки. Возможно, что условие для силового замыкания или геометрического замыкания требует, чтобы направление и положение фиксирующего контактного элемента располагалось в труднодоступной области полости рта пациента. Как видно на фиг. 6, головка 35 упорного винта может быть спроектирована так, чтобы вмещать инструмент для специального доступа, например, гексалобулярную отвертку 36, которая позволяет ввинтить упорный винт, при этом отвертка ориентирована в направлении, отличном от направления упорного винта. Это позволяет осуществить позиционирование отвертки в более удобном положении в полости рта при сохранении функциональной возможности ввинчивания упорного винта.
Контактные элементы 20 не должны мешать друг другу, и, таким образом предпочтительно ограниченное число контактных элементов. Максимальное число контактных элементов 20, которое является подходящим, определяется размером 3D-опорной поверхности, которая покрывается корпусом хирургического шаблона, и размером контактных элементов. Последнее может определяться посредством контактного радиуса, который предпочтительно лежит в диапазоне 0,01-5 мм, обычный контактный радиус может составлять, например, 0,1-1 мм. Контактные элементы предпочтительно представляют собой контакты "точка-площадь". Контактные элементы могут представлять собой сферические, сфероидальные, конические, пирамидальные или цилиндрические по форме точечные контакты. Контактные элементы могут представлять собой контакты с нулевой площадью.
Для простоты будет говорить, что хирургический шаблон имеет ограниченное число контактных точек, при этом минимальное и максимальное число контактных точек определяется, как описано выше (например, менее 30, менее 20 или менее 15, и 7 или более). Контактные элементы могут быть почти бесфрикционными или иметь силу трения, которая может определяться деформацией шаблона при установке или посредством регулирования положения контактного элемента 20, например, при помощи регулировки винтом. Хирургические шаблоны по настоящему изобретению могут включать в себя различные материалы для контактных элементов, например, металлы или пластики. Фрикционные свойства контакта между контактным элементом и 3D-опорной поверхностью в значительной степени зависят от характеристик материалов и контактного элемента, и 3D-опорной поверхности. Хирургические шаблоны согласно вариантам осуществления настоящего изобретения могут включать в себя контактные элементы, которые являются или статичными, "локаторными", или активными, то есть "фиксирующими", например, регулируемыми с образованием давления замыкания.
Варианты осуществления настоящего изобретения обеспечивают позиционирование на 3D-опорной поверхности посредством силового замыкания или геометрического замыкания. Позиционирование силовым замыканием хирургического шаблона представляет собой зажимание хирургического шаблона на 3D-опорной поверхности, при этом можно прикладывать произвольные силы и моменты к этой 3D-опорной поверхности посредством геометрической конструкции этих контактных элементов и, эквивалентно, любое движение хирургического шаблона относительно 3D-опорной поверхности испытывает сопротивление со стороны контактной силы, что означает, что 3D-опорная поверхность не может нарушить контакт с контактными элементами без некоторой ненулевой внешней работы. Позиционирование геометрическим замыканием представляет собой более строгое применение зажимания силовым замыканием, в том смысле, что 3D-опорная поверхность не может нарушить контакт с контактными элементами независимо от величины и направления любой внешней, но недеформирующей работы. В 3D-пространствах позиционирование силовым замыканием хирургического шаблона может достигаться с помощью по меньшей мере 2 фрикционных контактных элементов с мягкими пальцами, или по меньшей мере 3 фрикционных контактных элементов с жесткими пальцами. Причина этого состоит в том, что зажимание с помощью двух hard-finger контактных элементов, вместо двух soft-finger контактных элементов, не может генерировать вращательный момент или сопротивляться вращательным моментам вокруг линии, соединяющей две точки контакта. Геометрическое замыкание может быть достигнуто только с помощью по меньшей мере 7 контактных элементов в 3D-пространстве. Следует помнить, что в 2D-пространстве требуется только 4 контактных элемента для достижения геометрического замыкания. Принцип геометрического замыкания в 2D-пространстве проиллюстрирован на фиг. 5d. Из этого чертежа ясно, что 3 степени свободы, существующие в 2D-пространстве (2 поступательных перемещения и 1 поворот) хирургического шаблона относительно 3D-опорной поверхности блокированы, независимо от величины или направления любой внешней работы, например, попытки оттянуть или наклонить шаблон от 3D-опорной поверхности без деформации хирургического шаблона или 3D-опорной поверхности.
В результате хирургические шаблоны согласно вариантам осуществления настоящего изобретения будут включать в себя по меньшей мере 2 контактных элемента 20 и, более типично, иметь 7 или более контактных элементов 20 (например, менее 30, менее 20, менее 15). Контактные элементы предпочтительно представляют собой контакты "точка-площадь". Контактные элементы могут представлять собой сферические, сфероидальные, конические, пирамидальные или цилиндрические по форме точечные контакты. Контактные элементы могут представлять собой контакты с нулевой площадью.
Хирургические шаблоны 10 согласно вариантам осуществления настоящего изобретения включают в себя хирургический шаблон 10, имеющий отдельные контактные элементы, которые контактируют с жесткими областями 3D-опорной поверхности, образованными анатомическими образованиями полости рта, например, зубами, восстановительными элементами, имплантами, пломбами, несъемными или съемными протезами, винирами и/или челюстной костью. Отдельные контактные элементы 20 предпочтительно не находятся в контакте с мягкими областями полости рта, например, слизистой оболочкой или десной, поскольку это может нарушать однозначность позиционирования хирургического шаблона 10, хотя такие контактные элементы могут существовать наряду с контактными элементами по настоящему изобретению. При необходимости может быть поднят лоскут мягких тканей и подлежащая кость может использоваться в качестве 3D-опорной поверхности. Хирургические шаблоны согласно вариантам осуществления настоящего изобретения могут включать в себя контактные элементы, которые контактируют с костной поверхностью посредством десны без необходимости отслоения лоскута, и в то же время являются неинвазивными для этой кости в месте контакта. Варианты осуществления хирургического шаблона 10 по настоящему изобретению могут включать в себя контакты большей площади, которые опираются на мягкие области 3D-опорной поверхности, например, на десну. Однако, это не должно влиять на позиционирование хирургического шаблона 10 на 3D-опорной поверхности, которое достигается посредством отдельных контактных элементов 20, расположенных на жестких областях 3D-опорной поверхности, образованной анатомическими образованиями полости рта пациента. Хирургические шаблоны согласно вариантам осуществления настоящего изобретения могут включать в себя более 7 контактных элементов, и они могут обеспечивать лучшую стабильность, хотя не требуются для достижения силового замыкания или геометрического замыкания. Особенно предпочтительный хирургический шаблон согласно вариантам осуществления настоящего изобретения представляет собой хирургический шаблон, имеющий 6 неподвижных, то есть "локаторных" контактных элементов, и 1- 3 активных, то есть, 'фиксирующих', контактных элемента(ов), при этом локаторные контактные элементы выполнены с возможностью работать без трения или почти без трения, а фиксирующий контактный элемент может фиксировать с использованием или без использования сил трения. В настоящем документе указанные 6 статических локаторных контактных элементов определяют однозначное и воспроизводимое положение согласно предварительному плану операции, при этом условие силового замыкания или геометрического замыкания достигается посредством добавления по меньшей мере еще одного контактного элемента, то есть фиксирующего контактного элемента.
Хирургические шаблоны 10 согласно вариантам осуществления настоящего изобретения могут включать в себя один или более контактных элементов, работающих с трением или без трения. Контактные элементы предпочтительно представляют собой контакты "точка-площадь". Контактные элементы могут представлять собой сферические, сфероидальные, конические, пирамидальные или цилиндрические по форме точечные контакты. Контактные элементы могут представлять собой контакты с нулевой площадью. В случае бесфрикционных контактов каждый контакт представляет собой отдельный точечный контакт, в котором контактная сила направлена перпендикулярно 3D-опорной поверхности в положении, где выполнен контакт. В случае контакта с трением направление контактных сил, действующих на фрикционные контактные элементы, располагаются в конусе с вершиной на 3D-опорной поверхности, то есть сила трения может быть разложена на компоненты, перпендикулярную и касательную к 3D-опорной поверхности в точке контакта.
Рассмотрим пример хирургического шаблона, имеющего 6 локаторных контактных элементов и 1 фиксирующий контактный элемент, все бесфрикционные, так что достигается геометрическое замыкание. Таким образом, считается что этот конкретный хирургический шаблон соответствует вариантам осуществления настоящего изобретения. Ниже на фиг. 8 описан и обобщенно изложен один конкретный способ согласно вариантам осуществления настоящего изобретения для получения положения контактных элементов для этого хирургического шаблона. Начальной точкой является предварительный план операции, содержащий изображения пациента, из которых может быть извлечена и определена 3D-опорная поверхность, необязательно, цифровое представление хирургического шаблона. 3D-опорная поверхность располагается предпочтительно на жестких элементах зубного ряда, например, зубах, восстановительных элементах, например, имплантах, мостовидных протезах, и коронках, пломбах, винирах, несъемных или съемных протезах, кости и, необязательно, мягких тканях.
В способе конструирования хирургического шаблона, представленного на фиг. 8, порядок этапов 1, 2 и 3 может взаимозаменяться. Способ конструирования шаблона является следующим:
a) На этапе 1 на основе цифровых изображений пациента определяется индивидуализированная цифровая версия хирургического шаблона или цифровая версия хирургического шаблона получается от третьей стороны.
b) На этапе 2 проектируется направляющий элемент или конструкция принимается от третьей стороны. На этапе 3 для геометрического замыкания определяется положение исходного набора из 6 локаторных контактов и 1фиксирующего контакта на 3D-опорной поверхности, и эти положения передаются на цифровое представление хирургического шаблона 10.Альтернативно для силового замыкания может быть выбрано положение 2 soft-finger фрикционных контактов или по меньшей мере 3 hard-finger фрикционных контактов. Контактные элементы представляют собой предпочтительно контакты "точка-площадь". Контактные элементы могут представлять собой сферические, сфероидальные, конические, пирамидальные или цилиндрические по форме точечные контакты. Контактные элементы могут представлять собой контакты с нулевой площадью.
c) Для определения исходного набора положений могут использоваться различные способы, например, на основании предыдущего опыта или просто на основании случайного выбора 7 или более (например, менее 30, менее 20, менее 15) положений, например, посредством применения метода Монте-Карло для выбора большого числа мест расположения контактов.
d) На этапе 3, помимо положения, для геометрического замыкания также определяется направление нормали к 3D-опорной поверхности в этих контактных элементах, при установленном состоянии шаблона. В вариантах осуществления для геометрического замыкания предполагается, что контактные элементы являются бесфрикционными, таким образом, приводя к контактной силе, которая будет находиться в направлении нормали к 3D-опорной поверхности в этих контактных точках, когда шаблон установлен. Следует заметить, что силы, действующие на контактный элемент для силового замыкания с трением, могут быть смоделированы посредством конуса трения, то есть силы, действующие на контактный элемент с трением, могут быть разложены на компоненты, нормальную и тангенциальную к 3D-опорной поверхности в этой контактной точке.
e) На этапе 4 применяется формула Эйлера-Ньютона, таким образом блокируется любое поступательное или поворотное перемещение, то есть оно является нулевым. Это приводит к такому состоянию, что величина сил и моментов в каждом из контактных элементов не может быть отрицательной, когда шаблон находится во установленном положении. Если это условие выполняется, будем говорить, что хирургический шаблон имеет силовое замыкание, и также в этом конкретном примере имеет геометрическое замыкание.
f) На этапе 5, если это условие не соблюдено, набор положений контактных точек может быть обновлен. И вновь могут использоваться различные способы для определения нового набора положений, один из которых представляет собой замену одной из контактных точек случайно выбранной новой точкой. Этот новый набор контактных точек затем снова оценивается в отношении условия силового замыкания или геометрического замыкания. Эта процедура может быть повторена посредством замены контактного элемента каждый раз на другой контактный элемент, например, метод Монте-Карло может быть применен для выбора и оценки большого числа мест расположения контактов.
g) Набор контактных элементов может оцениваться по другому критериям, например, равномерности распределения сил и моментов, действующих на контактные элементы. Повторение при обновлении набора контактных элементов может предлагаться для оптимизации распределения сил и моментов, когда шаблон находится в установленном положении. Оптимизация в равномерности распределения силы и момента включает в себя пошаговую установку определения набора контактных элементов, при этом для каждого набора вычисляется отклонение значений силы и момента для различных контактных элементов. Набор контактных элементов с минимальным отклонением будет оптимальным набором по критерию равномерности распределения силы и момента. Аналогично, может быть найден набор контактных элементов для набора, который имеет минимизированную максимальную силу на одном из контактных элементов. В настоящем документе максимальное значение силы и момента записывается для каждого набора контактных элементов. Набор контактных элементов, который имеет минимальное максимальное значение, приведет к оптимальному набору по этому критерию.
h) Необязательно лабораторная модель зубного ряда, например, каменная или гипсовая модель может изготавливаться по зубному ряду пациента, и шаблон 10, имеющий контактные элементы, может быть припассован на гипсовую модель. Альтернативно шаблон может быть припассован в полости рта пациента. При необходимости контактные элементы могут быть изменены вручную, например, с использованием стоматологического сверла.
i) Наконец, на этапе 6 шаблон со своими контактными элементами изготавливается способами, раскрытыми ниже.
Ниже описан один частный алгоритм для оценки условия силового замыкания для конкретного примера хирургического шаблона, имеющего 6 бесфрикционных неподвижных локаторных контактных точек и 1 активную 'фиксирующую' контактную точку, на основании ссылки, ʺОптимизация компоновки приспособления в области множества точек, Wang Y. M., и Pelinescu D. M., IEEE Transactions on Robotic и automation, vol. 17, No. 3, June 2001ʺ, которая полностью включена в настоящий документ.
Без ограничения теорией, раскрытой ниже, в объем настоящего изобретения включены другие связанные способы для получения положения и определения контактных элементов для хирургического шаблона, и эти способы могут быть применимы для получения других хирургических шаблонов в пределах диапазона, которые соответствуют вариантам осуществления настоящего изобретения. В нижеследующем контактные точки представляют собой точечные контакты "точка-площадь", например, точечные контакты с нулевой площадью. Точечные контакты могут быть, например, сферическими, сфероидальными, коническими, пирамидальными или цилиндрическими.
Предположим, что i-тая контактная точка, имеющая вектор положения  на 3D-опорной поверхности, имеет небольшое возмущение положения
на 3D-опорной поверхности, имеет небольшое возмущение положения  относительно хирургического шаблона 10. Это возмущение приведет к небольшому смещению всей 3D-опорной поверхности относительно хирургического шаблона, описываемому вектором 6×1 вектор
относительно хирургического шаблона 10. Это возмущение приведет к небольшому смещению всей 3D-опорной поверхности относительно хирургического шаблона, описываемому вектором 6×1 вектор  , включающему в себя 3 компоненты поступательного перемещения (вектор b) и 3 поворотных (вектор
, включающему в себя 3 компоненты поступательного перемещения (вектор b) и 3 поворотных (вектор  ) компоненты. Зависимость между смещениями в различных контактных элементах и всего шаблона может быть описана следующим образом:
) компоненты. Зависимость между смещениями в различных контактных элементах и всего шаблона может быть описана следующим образом:
( 1 )
при этом векторы
( 2 )
представляют собой векторы-столбцы 6×1, где  , и
, и  представляет собой вектор 3×1, который представляет направленный наружу (от 3D-опорной поверхности) единичный нормальный вектор в точке контакта с хирургическим шаблоном.
представляет собой вектор 3×1, который представляет направленный наружу (от 3D-опорной поверхности) единичный нормальный вектор в точке контакта с хирургическим шаблоном.  является скалярной величиной, которая является положительной, когда небольшое перемещение имеет компоненту поступательного перемещения, направление которой совпадает с направлением нормали в точке контакта, которая является отрицательной, когда небольшое перемещение имеет компоненту поступательного перемещения, направление которой противоположно направлению нормали в точке контакта, и которая равна 0, когда небольшое перемещение перпендикулярно нормали в точке контакта. Практическое понимание этого состоит в том, что
является скалярной величиной, которая является положительной, когда небольшое перемещение имеет компоненту поступательного перемещения, направление которой совпадает с направлением нормали в точке контакта, которая является отрицательной, когда небольшое перемещение имеет компоненту поступательного перемещения, направление которой противоположно направлению нормали в точке контакта, и которая равна 0, когда небольшое перемещение перпендикулярно нормали в точке контакта. Практическое понимание этого состоит в том, что  представляет собой (запрещенное) перемещение точки контакта в хирургический шаблон, что
представляет собой (запрещенное) перемещение точки контакта в хирургический шаблон, что  представляет собой перемещение точки контакта от хирургического шаблона (контакт потерян), и что
представляет собой перемещение точки контакта от хирургического шаблона (контакт потерян), и что  представляет собой перемещение, параллельное хирургическому шаблону (контакт сохранен). Для хирургического шаблона, имеющего m контактных элементов с 3D-опорной поверхностью, отдельные уравнения возмущения могут быть собраны в единую формулу, описывающую всю систему хирургического шаблона как:
представляет собой перемещение, параллельное хирургическому шаблону (контакт сохранен). Для хирургического шаблона, имеющего m контактных элементов с 3D-опорной поверхностью, отдельные уравнения возмущения могут быть собраны в единую формулу, описывающую всю систему хирургического шаблона как:
( 3 )
где  полностью характеризует кинематику фиксации хирургического шаблона на 3D-опорной поверхности посредством n различных контактных элементов. Однозначная локализация представляет собой фундаментальное требование, указывающее, что заготовка не может выполнять никакое ничтожно малое движение без потери контакта с по меньшей мере одним локатором. Это верно, тогда и только тогда, когда матрица локаторов G имеет полный ранг, равный шести, то есть ранг G=6.
полностью характеризует кинематику фиксации хирургического шаблона на 3D-опорной поверхности посредством n различных контактных элементов. Однозначная локализация представляет собой фундаментальное требование, указывающее, что заготовка не может выполнять никакое ничтожно малое движение без потери контакта с по меньшей мере одним локатором. Это верно, тогда и только тогда, когда матрица локаторов G имеет полный ранг, равный шести, то есть ранг G=6.
Рассмотрим частный вариант осуществления представленного изобретения, имеющий неподвижные локаторные контактные элементы и зажим, определяемый положением вектора  и единичной нормалью к поверхности
и единичной нормалью к поверхности  . Для контактной точки зажимающая сила, прикладываемая к 3D-опорной поверхности имеет вид:
. Для контактной точки зажимающая сила, прикладываемая к 3D-опорной поверхности имеет вид:

( 4 )
где  представляет величину зажимающей силы. Пусть Q представляет все внешние силы, приложенные к 3D-опорной поверхности относительно хирургического шаблона, считающегося фиксированным в пространстве. Интуитивно Q представляет все силы, например, силу тяжести, тяги рукой, толкания рукой и т.д., прикладываемой к хирургическому шаблону относительно 3D-опорной поверхности. Затем, уравнение статического равновесия имеет вид
представляет величину зажимающей силы. Пусть Q представляет все внешние силы, приложенные к 3D-опорной поверхности относительно хирургического шаблона, считающегося фиксированным в пространстве. Интуитивно Q представляет все силы, например, силу тяжести, тяги рукой, толкания рукой и т.д., прикладываемой к хирургическому шаблону относительно 3D-опорной поверхности. Затем, уравнение статического равновесия имеет вид

( 5 )
Здесь первый член представляет внутренние силы в неподвижных локаторных контактах, второй член представляет силы в активном зажимном контакте, и третий член представляет внешние силы, приложенные к хирургическому шаблону. При этом неотрицательный вектор-столбец nx1  представляет собой совокупность величин каждой обобщенной контактной силы
представляет собой совокупность величин каждой обобщенной контактной силы  , где
, где 
Общий вид для решения этого уравнения для интенсивности (величин) локаторных контактных сил  может быть выражен как
может быть выражен как

( 6 )
где  .
.
Здесь  псевдообратная матрица от
псевдообратная матрица от  ,
,  представляет собой матрицу предсказания, и
представляет собой матрицу предсказания, и  представляет собой произвольный вектор
представляет собой произвольный вектор  . Первые два члена представляют собой частные решения уравнения и представляют, соответственно, величины локаторных контактных сил в ответ на внешние силы
. Первые два члена представляют собой частные решения уравнения и представляют, соответственно, величины локаторных контактных сил в ответ на внешние силы  и зажимающее действие. Последний член представляет однородное решение, и оно соответствует внутренним силам среди локаторов. Поскольку локаторы являются пассивным элементом, эти внутренние силы физически не должны возникать. Следовательно, последним членом необходимо пренебречь, и условие силового замыкания становится (наряду с условием, что ранг G=6):
и зажимающее действие. Последний член представляет однородное решение, и оно соответствует внутренним силам среди локаторов. Поскольку локаторы являются пассивным элементом, эти внутренние силы физически не должны возникать. Следовательно, последним членом необходимо пренебречь, и условие силового замыкания становится (наряду с условием, что ранг G=6):

( 7 )
для  , где
, где  - число контактных элементов,
- число контактных элементов,  и называется информационной матрицей Фишера для зафиксированной конструкции, которая в данном случае представляет собой хирургический шаблон. Указанный анализ показывает, что условие силового замыкания зависит одновременно от места (
и называется информационной матрицей Фишера для зафиксированной конструкции, которая в данном случае представляет собой хирургический шаблон. Указанный анализ показывает, что условие силового замыкания зависит одновременно от места ( ) каждого локатора, а также от места зажима (
) каждого локатора, а также от места зажима ( ). Кроме того, если условие силового замыкания удовлетворяется для каждого зажима отдельно, тогда любое сочетание этих зажимов также будет удовлетворять указанному условию. Следовательно, анализ силового замыкания для фиксированной конструкции со множеством зажимов может быть сведено к последовательному анализу фиксированной конструкции с одним зажимом.
). Кроме того, если условие силового замыкания удовлетворяется для каждого зажима отдельно, тогда любое сочетание этих зажимов также будет удовлетворять указанному условию. Следовательно, анализ силового замыкания для фиксированной конструкции со множеством зажимов может быть сведено к последовательному анализу фиксированной конструкции с одним зажимом.
Вышеприведенный вывод условия силового замыкания применим для частного варианта осуществления представленного изобретения, то есть в случае бесфрикционных контактных элементов с 6 локаторными контактными элементами и одной фиксирующей контактной точкой. Другие конфигурации хирургических шаблонов, которые также являются вариантами осуществления представленного изобретения, могут включать в себя трение контактных элементов. Эти силы, действующие в контактной точке с трением, могут быть представлены посредством конуса трения, где требуется учитывать тангенциальные компоненты силы трения. Алгоритмы, аналогичные описанным выше, могут применяться для обнаружения условия силового замыкания, когда вовлечены контактные элементы с трением (см., например, "Проблема замыкания и оптимизация сил в фиксируемых конструкциях и манипуляции роботов", J. Ma, M. Y. Wang и X. Zhu, 6th annual IEEE Conference on automation science и engineering, Canada, 2010, включенный в полном объеме в настоящий документ посредством ссылки).
Специалист в данной области техники осведомлен, что существует несколько последовательностей действий для обнаружения положений локатора, которые соответствуют требованию к силовому замыканию или требованиям к оптимизации технических характеристик, как упомянуто в предыдущем абзаце. Настоящее изобретение не ограничивается конкретными последовательностями действий, описанными выше, но включает в свой объем любые такие последовательности действий. Варианты осуществления настоящего изобретения включают в себя любую конструкцию хирургического шаблона, которая удовлетворяет условию силового замыкания или геометрического замыкания, независимо от последовательности действий, используемых для получения набора контактных элементов, которые удовлетворяют какому-либо из этих условий.
Конструирование хирургического шаблона 10 согласно вариантам осуществления настоящего изобретения содержит или состоит из двух аспектов:
определения положения локаторов и конструирования конфигурации фиксатора для силового замыкания или геометрического замыкания. Для данной 3D-опорной поверхности может существовать большое число наборов контактных элементов для хирургического шаблона согласно вариантам осуществления настоящего изобретения, удовлетворяющих условиям силового замыкания или геометрического замыкания. Варианты осуществления настоящего изобретения включают в себя хирургические шаблоны, соответствующие критериям для технических характеристик фиксируемой конструкции, например, a) точности расположения (то есть ошибкоустойчивости точности расположения хирургического шаблона к ошибкам расположения локаторов); b) минимизации контактных сил локаторов и c) оптимизированному балансу сил локаторов. Варианты осуществления представленного изобретения могут, необязательно, включать в себя эти оптимизированные условия технических характеристик.
Варианты осуществления настоящего изобретения включают в себя хирургические шаблоны 10, обладающие различными способами фиксации хирургического шаблона на 3D-опорной поверхности. Примеры различных фиксирующих механизмов, которые могут быть включены в хирургические шаблоны согласно вариантам осуществления настоящего изобретения (но без ограничения): фиксация посредством использования упорного винта (ов), фиксация посредством защелкивания хирургического шаблона на 3D-опорной поверхности, при этом исходная деформация хирургического шаблона генерирует внутреннее напряжение в хирургическом шаблоне, что приводит к фиксирующим силам на контактных элементах, фиксация посредством использования рычага (ов), фиксация посредством использования пружины (пружин), фиксация посредством консоли и т.д.. Например, фиг. 4b представляет собой изображение частного варианта осуществления настоящего изобретения хирургического шаблона, имеющего 6 локаторных контактных элементов 21, 22, 23, 24, 25, 26 и 1 фиксирующую точку 27, при этом фиксация достигается посредством использования упорного винта 28 на 3D-опорной поверхности.
Варианты осуществления настоящего изобретения включают в себя варианты материала, используемого для корпуса, направляющих элементов и контактных элементов хирургического шаблона. Это может давать некоторые преимущества, например, возможность изменения фрикционных свойств контактных элементов. Кроме того, корпус хирургического шаблона может содержать или состоять из сочетания множества материалов. Например, частный вариант осуществления хирургического шаблона 10 может представлять собой одноэлементный хирургический шаблон, изготовленный из благородного металла, например, титана, титанового сплава, например, титан-алюминиевого, или титан-ванадиевого, кобальта или кобальтого сплава, например, кобальто-хромового или кобальто-молибденового. Хирургические шаблоны, в которых корпус замысливается имеющим металлическую сетку, могут давать конкретные преимущества перед другими материалами, например, материалами на основе полимеров, например, отвержденных эпоксидных полимеров, из-за:
a) хорошей стабильности формы и устойчивости к нагреванию, влажности или излучению, что может быть полезно для стерилизации хирургического шаблона
b) чрезвычайная прочность металла обеспечивает минималистскую конструкцию, обеспечивающую отличный доступ к месту импланта, для хорошего орошения во время сверления, лучшей обозримости и использования хирургии с использованием мини-лоскутов.
c) облегчения воспроизводимой установки в надлежащем положении, которая также обеспечивает более точную подгонку импланта.
d) встроенных отверстий для сверления вместо вкладышей, что упрощает изготовление шаблона и увеличивает точность направления сверла.
e) Все это способствует лучшему лечению для пациента, как с точки зрения стоимости, так и с точки зрения технического и эстетического качества.
Однако использование металлических шаблонов ограничено, и настоящее изобретение обеспечивает предпочтительные усовершенствования, например, уменьшение площади контакта контактных элементов, делая более легким точное размещение.
Хирургические шаблоны согласно вариантам осуществления настоящего изобретения могут быть изготовлены посредством различных способов. Конкретные варианты осуществления настоящего изобретения включают в себя способы изготовления, которые создают хирургические шаблоны по объемным или другим сканированным изображениям, например, КТ-сканированным изображениям, КЛКТ -сканированным изображениям и МРТ-сканированным изображениям или оптическим сканированным изображениям. Способы изготовления, включенные в объем настоящего изобретения, могут включать в себя способ послойного изготовления, или, проще говоря, способы "аддитивного изготовленияʺ, способы фрезерования или их сочетание. Термин уровня техники "аддитивное изготовление" (АМ) следует понимать в широком смысле. ISO/ASTM52900-15 определяет семь категорий AM-процессов: разбрызгивание связующего вещества, прямой подвод энергии непосредственно в место построения, выдавливание материала, впрыскивание материала, расплавление материала в заранее сформированном слое, соединение листовых материалов и фотополимеризация с ванной. Такие способы проводят посредством 3D-зоны обслуживания роботов, преобразуя массу сырого материала в требуемую форму посредством добавления материала слой за слоем. Другие термины для послойного изготовления включают в себя настольное изготовление, быстрое изготовление, быстрое создание опытного образца и изготовление по требованию, или печать по требованию, или 3D-печать. Процессы добавления включены в объем настоящего изобретения независимо от того, каким образом слои наносятся для создания частей и материалов, которые используются. Подходящие способы могут включать в себя плавление или размягчение материала для изготовления слоев, например, избирательное лазерное расплавление (SLM) или прямое лазерное спекание металлов (DMLS), выборочное лазерное спекание (SLS), моделирование методом наплавления (FDM) или метод моделирования путем направления жилы (FFF), также включающие в себя отверждение жидких материалов с использованием различных технологий, например, стереолитографии (SLA), или изготовления слоистого объекта (LOM). Любые, некоторые или все способы аддитивного изготовления согласно вариантам осуществления настоящего изобретения включают в себя использование при необходимости расходных и вспомогательных материалов.
Подходящими материалами являются любые из: SLM: Ti, Co-Cr, (нержaвеющая) сталь, серебро, золото, бронза, латунь, алюминий
SLA: эпоксидные смолы, акриловые смолы, акриловые эпоксидные смолы, TPA
FDM: ABS, поликарбонат, PPSU,
Фрезерование: металлы, уже упомянутые выше, ABS, ацеталь, акриловый полимер, POM, стеклонаполненный нейлон, нейлон, PEEK, фенольный полимер, PC, полиэтилен, полипропилен, полистирол, PTFE, PVC, PPS, полиамидный полимер, фторполимеры, PEI, фторуглеродные полимеры, стеклопластик на основе полимерной смолы, PPE, нейлон, сплав никеля, бериллиевая медь, железные сплавы
SLS: полиамид, стеклонаполненный полиамид, алюмид, огнестойкий полиамид, термопластический полиуретан
Струйная печать: акрилат, полимеры, виниловый полимер,
Вакуумное литье: полиуретан, TPE, ABS, PP, PC, PE
Варианты осуществления настоящего изобретения могут включать в себя комбинированные способы. Частный вариант осуществления настоящего изобретения использует сочетание избирательного лазерного расплавления (SLM) и фрезерования на станке с ЧПУ (CNC). В этом конкретном варианте осуществления этап фрезерования может следовать за этапом аддитивного изготовления (SLM) для точного определения окончательного положения и формы контактных элементов и для другого размера направляющего элемента, например, внутреннего диаметра направляющего цилиндра. При сочетании техник изготовления, например, описанных в вышеупомянутом конкретном варианте осуществления, предпочтительно используется репер между пластиной для объемной печати и фрезеровальной установкой, так что события фрезеровки происходят в правильном участке на устройстве. Опциями являются по меньшей мере:
Втулка: направляющие (1 или более) соединяются со втулкой во время печати. После печати втулка и прикрепленные направляющие размещаются на специальном втулочном держателе, чтобы иметь репер во время фрезерования.
Реперный объект на пластине для объемной печати. Это позволяет фрезерование непосредственно на пластине для объемной печати, то есть пакетного фрезерования, и избежать конструирования и создания втулки.
Варианты осуществления настоящего изобретения также включают в себя другие способы изготовления, которые представляют собой субтрактивную обработку, включающую в себя вырезание или фрезерование вручную по конструкции, например, обеспеченной последовательностью действий, объясненной выше.
После изготовления хирургического шаблона согласно вариантам осуществления настоящего изобретения и после каких-либо необходимых припасовок может быть выполнено компьютерная обработка, как представлено на фиг. 7. На этапах 10-13 хирургический шаблон проектируется и изготавливается, как описано выше. На этапе 14 шаблон размещается в полости рта пациента, располагаясь на 3D-опорной поверхности, например, поверхности зубов, реставрационных элементов, например, имплантов, мостовидных протезов, коронок, пломб, виниров, несъемных и съемных протезов или кости, при этом для направления хирургического инструмента используется один или более направляющих элементов. Например, инструмент может представлять собой одно или более сверл для сверления отверстия в кости, где будет устанавливаться имплант, или инструменты для установки импланта, то есть держатели импланта, или костный пьезотом для уменьшения или выравнивания челюсти, или разметочное устройство для создания внутриротовой разметки при подготовке последующего хирургического вмешательства, в заданном положении. Вид шаблона может обеспечивать хороший обзор места хирургического вмешательства и также хорошее орошение места хирургического вмешательства.
Настоящее изобретение также относится к системе, содержащей множество устройств, имеющих возможность цифровой обработки, например, компьютер для манипулирования изображениями, фрезеровальный станок с ЧПУ типа CNC, устройство аддитивного изготовления, сканер, например, КТ, КЛКТ, МРТ, или оптический сканер. Эти устройства могут включать в себя один или более микропроцессоров, микроконтроллеров, например, центральный процессор (CPU) и/или графический процессор (GPU), который выполняет соответствующие функции посредством программирования при помощи программного обеспечения, то есть одной или более компьютерных программ.
Любое, некоторые или все эти устройства могут иметь память (например, энергонезависимый компьютерночитаемый носитель, RAM и/или ROM),операционную систему, дисплей, например, дисплей фиксированного формата, устройства ввода данных, например, клавиатуру, указательное устройство, например, ʺмышьʺ, последовательные или параллельные порты для присоединения к другим устройствам, сетевые платы и соединения для соединения с любой из сетей.
Программное обеспечение может быть приспособлено для выполнения нижеперечисленных функций, когда программное обеспечение загружается на соответствующее устройство или устройства, и выполняется на одном или более устройствах обработки, например, микропроцессорах, ASIC, FPGA и т.п.:
Получение цифровых изображений зубного ряда пациента;
Обеспечение обработки и манипуляций с цифровыми изображениями зубного ряда пациента,
Извлечение и отображение 3D-опорной поверхности для хирургического шаблона, обеспечение цифровой версии шаблона, подлежащего размещению в изображениях зубного ряда пациента и для определения, отображения и изменения индивидуализированной цифровой версии хирургического шаблона.
Программное обеспечение может быть приспособлено для выполнения нижеперечисленных функций, когда программное обеспечение загружается на соответствующее устройство или устройства, и выполняется на одном или более устройствах обработки, например, микропроцессорах, ASIC, FPGA и т.п.:
Для геометрического замыкания отображение положения исходного набора контактных элементов, например, 6 локаторных контактов и 1 фиксирующего контакта на 3D-опорной поверхности и для переноса этих положений на цифровое представление хирургического шаблона. Альтернативно, для силового замыкания отображение положения 2 фрикционных контактов с мягкими пальцами или по меньшей мере 3 фрикционных контактов с жесткими пальцами.
Необязательно, для геометрического замыкания обеспечение определения направления нормали к 3D-опорной поверхности для этих контактных элементов, когда шаблон находится во установленном положении на 3D-опорной поверхности. Для геометрического замыкания контактные элементы могут рассматриваться как бесфрикционные, таким образом, приводя к контактной силе, направленной в направлении нормали к 3D-опорной поверхности в этих контактных точках, когда шаблон установлен. Силы, действующие на контактный элемент для силового замыкания с трением могут моделироваться посредством конуса трения, то есть силы, действующие на контактный элемент с трением, могут быть разложены на нормальную и тангенциальную компоненты к 3D-опорной поверхности в этой контактной точке.
Программное обеспечение может быть приспособлено для выполнения нижеперечисленных функций, когда программное обеспечение загружается на соответствующее устройство или устройства, и выполняется на одном или более устройствах обработки, например, микропроцессорах, ASIC, FPGA и т.д.:
Применение формулы Ньютона-Эйлера, когда любое поступательное или поворотное перемещение блокируется, то есть равно нулю, приводит к условию, что величина сил и моментов в каждом из контактных элементов не может быть отрицательной, когда шаблон находится во установленном положении. Если это условие выполняется, говорится, что хирургический шаблон имеет силовое замыкание, и, возможно, геометрическое замыкание.
Если это условие не удовлетворяется, программное обеспечение приспосабливается для обеспечения обновления набора положений контактной точки, например, обеспечения различных путей для определения нового набора положений, при этом один из них заключается в замене одной из контактных точек выбранной случайным образом новой точкой.
Программное обеспечение может быть приспособлено для обеспечения оценки каждого набора контактных точек в отношении силового замыкания или геометрического замыкания.
Программное обеспечение может быть приспособлено для обеспечения оценки каждого набора контактных элементов в отношении других критериев, например, равномерности распределения сил и моментов, действующих на контактные элементы.
Программное обеспечение может быть приспособлено для обеспечения повторений при обновлении набора контактных элементов для оптимизации распределения сил и моментов, когда шаблон находится во установленном положении.
Программное обеспечение может быть приспособлено для обеспечения оптимизаций в однородности распределения силы и момента, и может включать в себя установку повторения определения набора контактных элементов, где для каждого набора вычисляется отклонение величин силы и момента по различным контактным элементам.
Программное обеспечение может быть приспособлено для обеспечения выбора набора контактных элементов, имеющих минимальное отклонение в качестве критерия однородного распределения силы и момента.
Программное обеспечение может быть приспособлено для обеспечения поиска среди наборов контактных элементов такого набора, который имеет минимизированную максимальную силу на одном из контактных элементов.
Программное обеспечение может быть приспособлено для обеспечения записи максимальной величины силы и момента для каждого набора контактных элементов.
Программное обеспечение может быть приспособлено для выбора набора контактных элементов, имеющего минимальную максимальную величину.
Контактные элементы могут представлять собой сферические, сфероидальные, конические, пирамидальные или цилиндрические по форме точечные контакты.
Контактные элементы могут представлять собой контакты с нулевой площадью.
Программное обеспечение может быть приспособлено для обеспечения генерирования цифровых файлов шаблона с его контактными элементами, подходящего для изготовления, например, файлов для аддитивного изготовления, фрезерования на станке с ЧПУ типа CNC и т.п.
Любое из вышеупомянутого программного обеспечения может быть воплощено в виде компьютерного программного продукта, который скомпилирован для устройства обработки в любом из вышеупомянутых устройств, включающих в себя сетевое устройство, например, сервер. Компьютерный программный продукт может быть сохранен на энергонезависимом носителе для хранения сигналов, например, оптическом диске (CD-ROM или DVD-ROM), цифровой магнитной ленте, магнитном диске, твердотельной памяти, например, USB-флэш памяти, ROM и т.п.
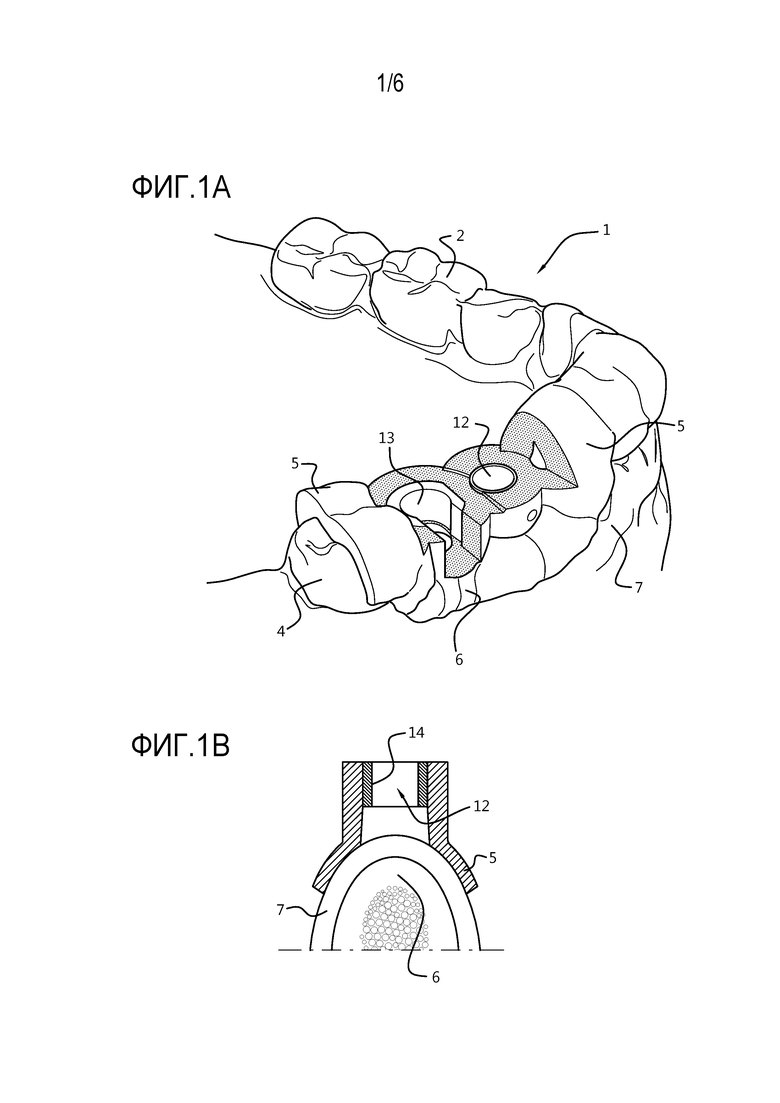
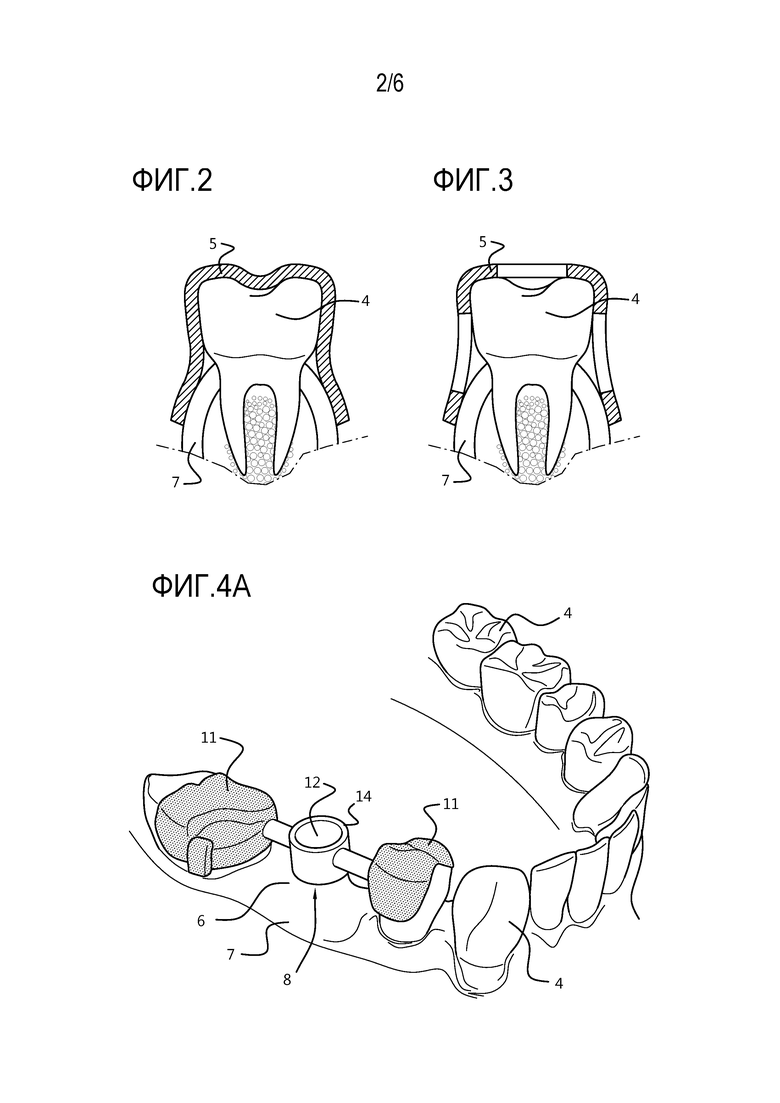
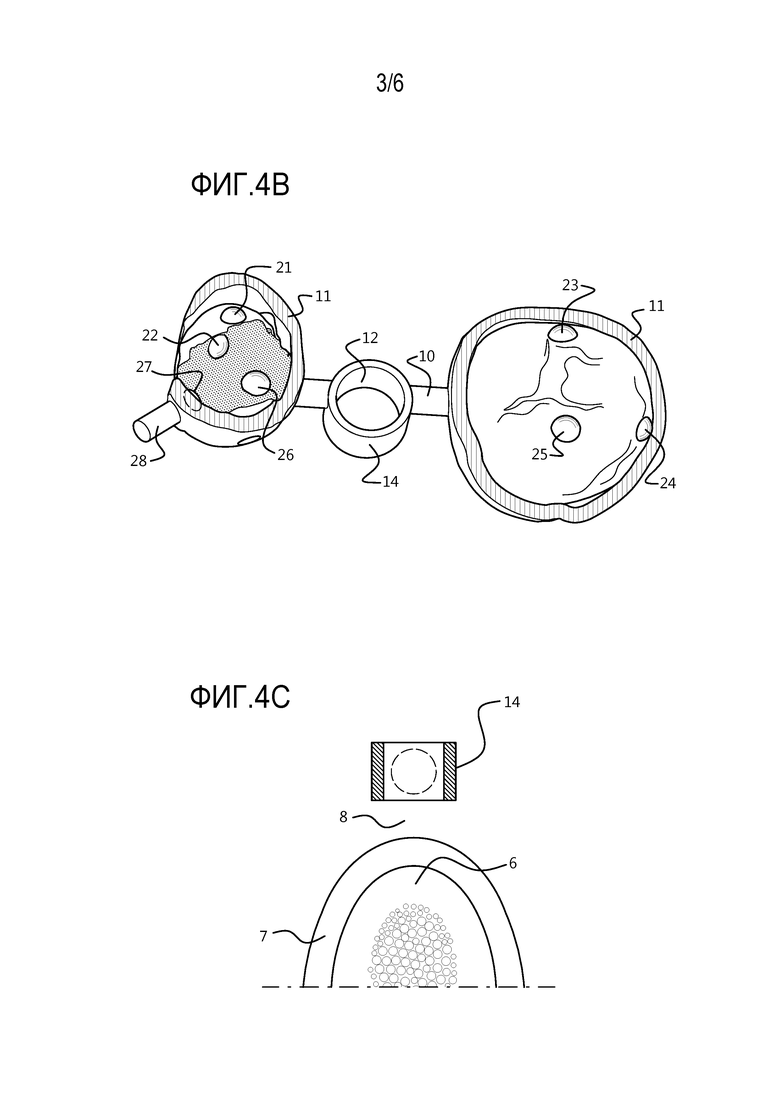
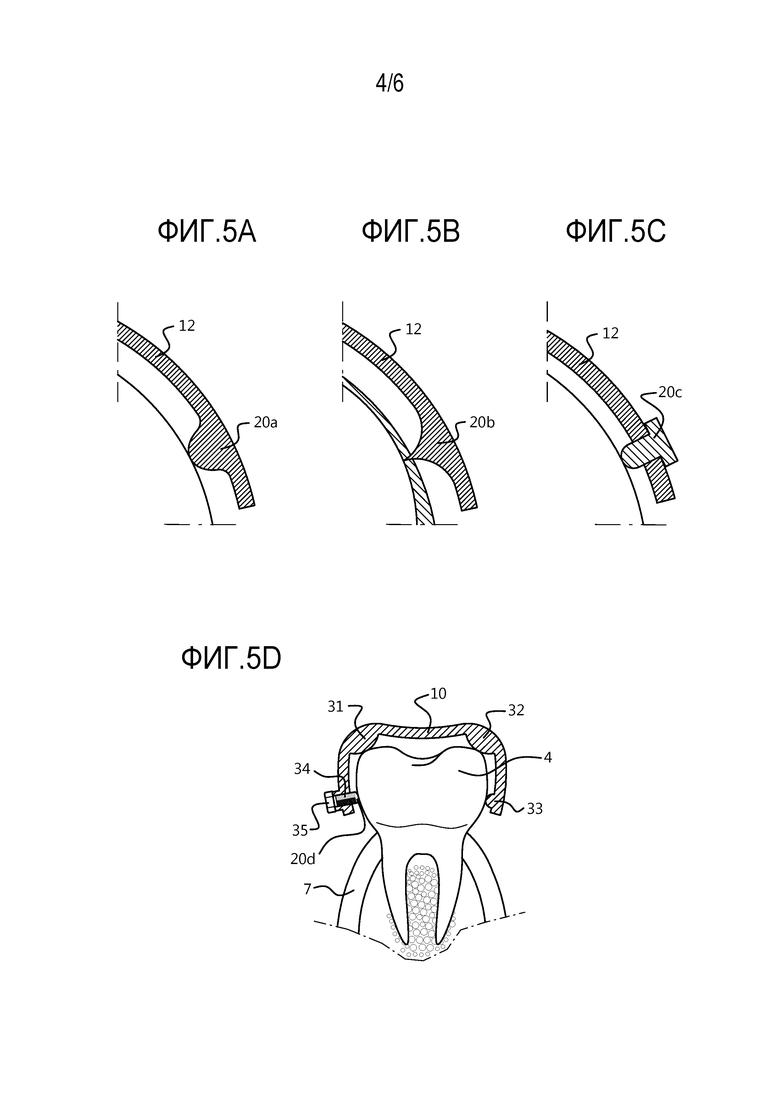
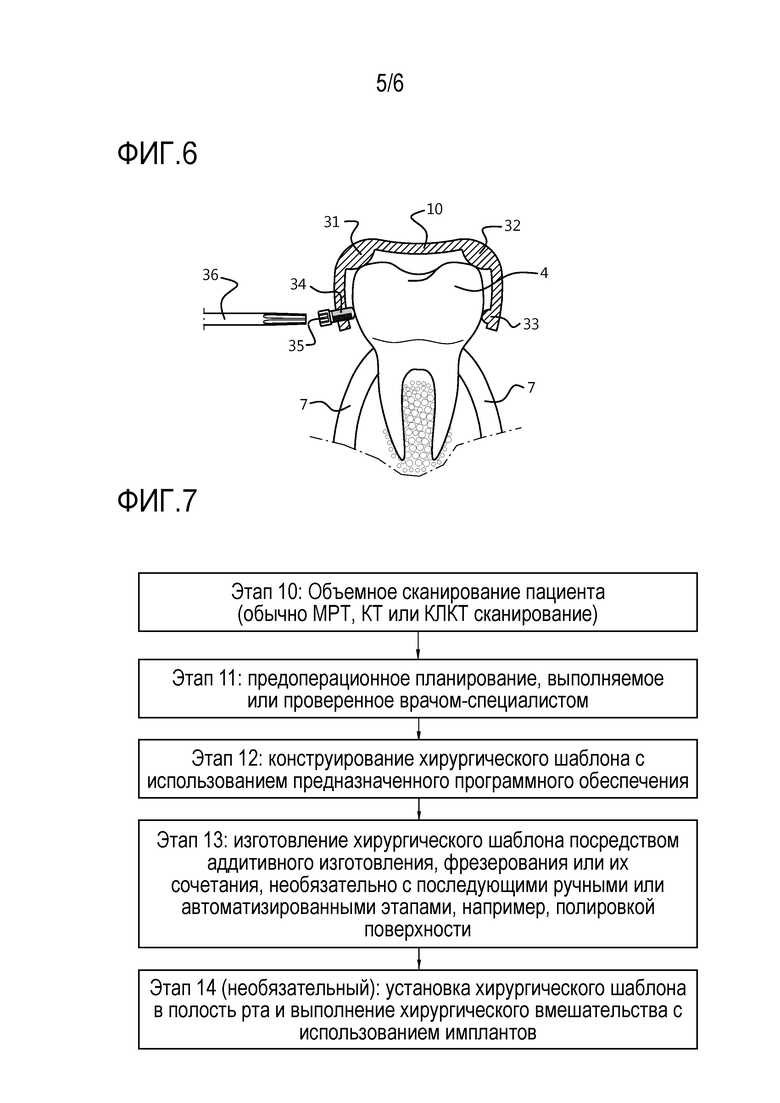
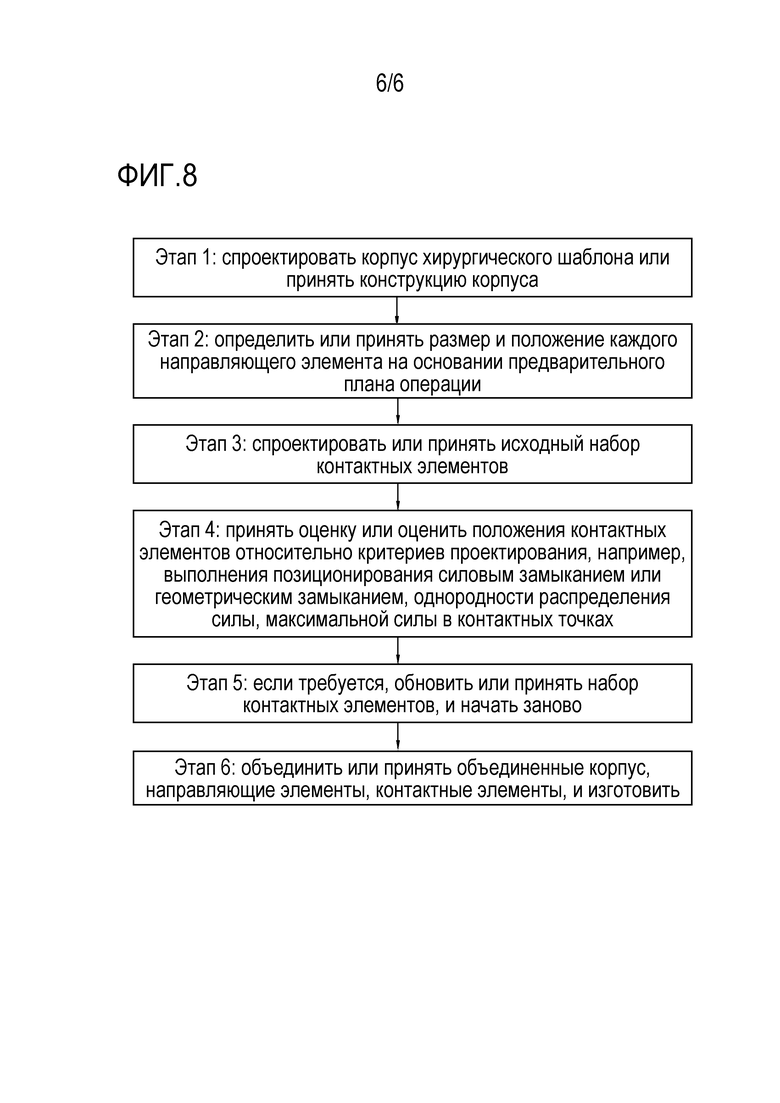
Группа изобретений относится к медицине, а именно к зубным хирургическим шаблонам и способам их изготовления. Шаблон имеет корпус, который включает в себя направляющие элементы для направления зубных инструментов, и набор из по меньшей мере семи контактных элементов. Каждый контактный элемент выполнен с возможностью контакта с жесткой частью 3D-опорной поверхности посредством точечного контакта. Корпус соединяет набор контактных элементов и направляюще элементы в единую часть. Шаблон с набором контактных элементов выполнен с возможностью совместного действия с 3D-опорной поверхностью для достижения геометрического замыкания, когда хирургический шаблон установлен на 3D-опорную поверхность, так, что корпус выполнен с возможностью не быть в контакте с 3D-опорной поверхностью. Шаблон имеет фиксирующий механизм посредством временной деформации хирургического шаблона, так что один или более контактных элементов могут быть защелкнуты на жесткой части 3D-опорной поверхности, выполняя условие для геометрического замыкания. Геометрическое замыкание представляет собой состояние, при котором хирургический шаблон не может быть удален с 3D-опорной поверхности в любом направлении посредством любой наружной силы, действующей на шаблон, без деформирования 3D-опорной поверхности или без деформирования хирургического шаблона. Достигается облегчение установки зубного импланта. 5 н. и 23 з.п. ф-лы, 14 ил.
1. Зубной хирургический шаблон для установки на 3D-опорную поверхность, образованную частью полости рта, указанный хирургический шаблон имеет корпус, который включает в себя один или более направляющих элементов для направления одного или более зубных инструментов, и набор из по меньшей мере семи контактных элементов, при этом каждый контактный элемент выполнен с возможностью контакта с жесткой частью 3D-опорной поверхности посредством точечного контакта, являющегося контактом "точка-площадь", при этом каждый точечный контакт выполнен с возможностью контакта с жесткой частью 3D-опорной поверхности в сингулярном точечном контакте, при этом корпус соединяет набор контактных элементов и указанные один или более направляющих элементов в единую часть, причем зубной хирургический шаблон, c набором контактных элементов, выполнен с возможностью совместного действия с 3D-опорной поверхностью для достижения геометрического замыкания, когда хирургический шаблон установлен на 3D-опорную поверхность, так, что корпус выполнен с возможностью не быть в контакте с 3D-опорной поверхностью, и фиксирующий механизм посредством временной деформации хирургического шаблона, так что один или более контактных элементов могут быть защелкнуты на жесткой части 3D-опорной поверхности, выполняя условие для геометрического замыкания, при этом геометрическое замыкание представляет собой состояние, при котором хирургический шаблон не может быть удален с 3D-опорной поверхности в любом направлении посредством любой наружной силы, действующей на шаблон, то есть любого сочетания величины силы и направления силы и места приложения силы, без деформирования 3D-опорной поверхности или без деформирования хирургического шаблона, при этом последнее включает в себя смещение положения контактных элементов относительно корпуса хирургического шаблона.
2. Хирургический шаблон по п. 1, в котором по меньшей мере шесть контактных элементов представляют собой статичные контактные элементы и по меньшей мере один контактный элемент представляет собой активный фиксирующий контактный элемент.
3. Хирургический шаблон по п. 1 или 2, в котором точечные контакты представляют собой сферические, сфероидальные, конические, пирамидальные или цилиндрические по форме точечные контакты.
4. Хирургический шаблон по п. 1, или 2, или 3, в котором точечные контакты представляют собой контакты с нулевой площадью.
5. Хирургический шаблон по любому из предшествующих пунктов, в котором жесткая часть 3D-опорной поверхности соответствует части челюсти, естественному зубному ряду или зубной реставрации, съемному протезу, несъемному протезу, пломбе, виниру или их лабораторной копии.
6. Хирургический шаблон по любому из предшествующих пунктов, изготовленный посредством любой из техник аддитивного изготовления, отливки и фрезерования или их сочетания.
7. Хирургический шаблон по любому из предшествующих пунктов, изготовленный посредством сочетания техники аддитивного изготовления и фрезерования на станке с ЧПУ типа CNC, при этом окончательная форма и положение физических контактных элементов получается посредством этапа фрезерования на станке с ЧПУ типа CNC.
8. Хирургический шаблон по п. 7, включающий в себя реперный элемент, позволяющий CNC-инструменту определить положение.
9. Хирургический шаблон по любому из предшествующих пунктов, представляющий собой индивидуализированный хирургический шаблон для использования в облегчении установки зубного импланта, переносе меток или уменьшении или выравнивании челюсти.
10. Хирургический шаблон по любому из предшествующих пунктов, представляющий собой индивидуализированный хирургический шаблон для использования в облегчении подготовки остеотомии для зубного импланта и установке зубного импланта согласно предварительному плану операции.
11. Хирургический шаблон по п. 10, в котором предварительный план операции содержит изображения анатомических образований пациента, представляющие собой объемные сканированные изображения, выбранные из КТ, или КЛКТ, или МРТ, или оптического сканированного изображения, и записанные в медицинских изображениях.
12. Хирургический шаблон по любому из предшествующих пунктов, в котором направляющий элемент обеспечивается в хирургическом шаблоне для направления хирургического инструмента для использования в остеотомии или в переносе меток.
13 Хирургический шаблон по п. 12, в котором остеотомия представляет собой костную полость или уменьшение или выравнивание кости.
14. Хирургический шаблон по любому из предшествующих пунктов, в котором один или более хирургических компонентов могут вставляться в или через направляющий элемент для приведения их в рабочее положение.
15. Хирургический шаблон по п. 14, в котором один или более хирургических компонентов представляют собой
одно или более сверл и/или инструментов для установки импланта, или держателей импланта, или
костный пьезотом для уменьшения или выравнивания челюсти, или
разметочное устройство для изготовления внутриротовой разметки в заданном положении при подготовке к последующему хирургическому вмешательству.
16. Способ изготовления хирургического шаблона для установки на 3D-опорную поверхность и опоры на 3D-опорную поверхность, при этом 3D-опорная поверхность образована частью полости рта человека, причем хирургический шаблон имеет, относительно по меньшей мере жесткой части 3D-опорной поверхности, ограниченный набор контактных элементов, при этом хирургический шаблон и 3D-опорная поверхность действуют совместно для достижения геометрического замыкания, когда хирургический шаблон установлен на 3D-опорную поверхность, причем способ содержит этапы, на которых получают предварительный план операции, содержащий изображения анатомических образований пациента, полученные посредством способа объемного сканирования, выбранного из КТ, или КЛКТ, или МРТ, или оптического сканированного изображения лабораторной модели, или оптического внутриротового сканированного изображения, и записанные в медицинских изображениях, генерируют цифровую версию хирургического шаблона для установки на 3D-опорную поверхность и опоры на 3D-опорную поверхность, обеспечивают в хирургическом шаблоне ограниченный набор контактных элементов относительно по меньшей мере жесткой части 3D-опорной поверхности, при этом контактные элементы представляют собой контакты "точка-площадь", и оценивают хирургический шаблон в отношении возможности действовать совместно с 3D-опорной поверхностью для достижения геометрического замыкания, когда хирургический шаблон установлен на 3D-опорной поверхности; при этом геометрическое замыкание представляет собой состояние, при котором хирургический шаблон не может быть удален с 3D-опорной поверхности в любом направлении посредством любой внешней силы, действующей на шаблон, то есть любого сочетания величины силы и направления силы и места приложения силы, без деформации 3D-опорной поверхности или без деформации хирургического шаблона, причем последнее включает в себя изменение положения контактных элементов относительно корпуса хирургического шаблона, и
изготавливают хирургический шаблон посредством аддитивного изготовления, или отливки, или фрезерования, или их сочетания.
17. Способ по п. 16, в котором точечные контакты представляют собой сферические, сфероидальные, конические, пирамидальные или цилиндрические по форме точечные контакты.
18. Способ по п. 16 или 17, в котором точечные контакты представляют собой контакты с нулевой площадью.
19. Энергонезависимый носитель информации, хранящий компьютерный программный продукт, который при исполнении на устройстве обработки выполняет способ по любому из пп. 16-18.
20. Система изготовления хирургического шаблона для установки на 3D-опорную поверхность и опоры на 3D-опорную поверхность, при этом 3D-опорная поверхность определяется частью полости рта человека, причем хирургический шаблон имеет, относительно по меньшей мере жесткой части 3D-опорной поверхности, ограниченный набор контактных элементов, при этом контактные элементы представляют собой контакты "площадь-точка", причем хирургический шаблон и 3D-опорная поверхность действуют совместно для достижения геометрического замыкания, когда хирургический шаблон установлен на опорную поверхность, система содержит
объемный сканер, выбранный из КТ, или КЛКТ, или МРТ сканера, или оптический сканер и средство для записи сканированных медицинских изображений;
компьютер для отображения изображений анатомических образований пациента по предварительному плану операции, и для генерирования цифровой версии хирургического шаблона для установки на 3D-опорную поверхность и опоры на 3D-опорную поверхность, и для обеспечения в хирургическом шаблоне ограниченного набора контактных элементов относительно по меньшей мере жесткой части 3D-опорной поверхности, и для оценки хирургического шаблона в отношении возможности действовать совместно с 3D-опорной поверхностью для достижения геометрического замыкания, когда хирургический шаблон установлен на опорной поверхности путем фиксации посредством временной деформации хирургического шаблона так, что один или более контактных элементов могут быть защелкнуты на жесткой части 3D-опорной поверхности, выполняя по меньшей мере условие для геометрического замыкания; и
устройство для аддитивного изготовления, или отливки, или фрезерования, или их сочетания для изготовления хирургического шаблона.
21. Система по п. 20, в которой точечные контакты представляют собой сферические, сфероидальные, конические, пирамидальные или цилиндрические по форме точечные контакты.
22. Система по п. 20 или 21, в которой точечные контакты представляют собой контакты с нулевой площадью.
23. Способ подготовки хирургического шаблона для изготовления с использованием компьютерной системы для цифрового проектирования хирургического шаблона, способ содержит этапы, на которых:
1) обеспечивают набор контактных элементов, которые контактируют с первым цифровым представлением 3D-опорной поверхности посредством контакта "точка-площадь", при этом первое цифровое представление 3D-опорной поверхности определяется частью полости рта человека,
2) обеспечивают второе цифровое представление одного или более направляющих элементов для зубного инструмента и
3) обеспечивают третье цифровое представление корпуса, который не находится в контакте с 3D-опорной поверхностью и который соединяет набор контактных элементов и указанный один или более направляющих элементов в единую часть, при этом положения набора контактных элементов достигаются компьютерной системой посредством первого математического определения по меньшей мере семи пространственных положений на первом цифровом представлении 3D-опорной поверхности, при этом возникает точечный контакт между хирургическим шаблоном и 3D-опорной поверхностью, причем положения набора контактных элементов определяются компьютерной системой посредством математического алгоритма, который оценивает, относительно математического условия для геометрического замыкания, набор положений на первом цифровом представлении 3D-опорной поверхности и набор соответствующих им направлений нормали к первому цифровому представлению 3D-опорной поверхности, причем набор контактных элементов хирургического шаблона является таким, что элементы контактируют с первым цифровым представлением 3D-опорной поверхности в точечном контакте с нулевой площадью, точно в этих положениях.
24 Способ по п. 23, в котором контактные элементы представляют собой сферические, сфероидальные, конические, пирамидальные или цилиндрические по форме точечные контакты.
25. Способ по п. 23 или 24, в котором контактные элементы представляют собой контакты с нулевой площадью.
26. Способ по п. 24 или 25, в котором для сферических или сфероидальных по форме точечных контактов центр сферического или сфероидального контактного элемента располагается на линии, перпендикулярной первому цифровому представлению 3D-опорной поверхности в положениях, которые были определены математическим алгоритмом как соответствующие условию силового или геометрического замыкания, причем положение центра вдоль перпендикулярной линии зависит от выбранного радиуса.
27. Способ по п. 26, в котором сочетание радиуса и центра контактной сферы является таким, что в ранее определенных положениях на 3D-опорной поверхности достигается точечный контакт с нулевой площадью.
28. Способ по п. 26 или 27, в котором физический шаблон обеспечивается посредством аддитивного изготовления, отливки или CNC-фрезерования, или их сочетания на основе поверхности цифрового проектирования.
| US 20110066267 A1, 17.03.2011 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ НАПРАВЛЯЮЩЕГО ШАБЛОНА ДЛЯ УСТАНОВКИ ЗУБНЫХ ИМПЛАНТАТОВ | 2009 |
|
RU2400178C1 |
| НАПРАВЛЯЮЩИЙ ШАБЛОН ДЛЯ УСТАНОВКИ ИМПЛАНТАТОВ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2013 |
|
RU2574575C2 |
| WO 2014040695 A1, 20.03.2014 | |||
| US 5613852 A1, 25.03.1997 | |||
| US 20040146830 A1, 29.07.2004. | |||

