Область техники, к которой относится изобретение
Предлагаемое изобретение относится к системам помощи водителю легкового автомобиля с прицепом и подобных ему транспортных средств при движении задним ходом, обладающими низкими эксплуатационными затратами и повышенной точностью управления прицепом при действии внешних неконтролируемых возмущающих воздействий.
Уровень техники
Для непрофессиональных водителей движение задним ходом легкового автомобиля с прицепом является очень сложной задачей, особенно для тех, которые ездят с прицепом эпизодически, или часто меняют прицепы. Основной причиной сложности управления автомобилем в таком режиме является исходная неустойчивость объекта управления «автомобиль-прицеп» при движении назад. Это порождает ряд трудностей: необходимость управлять автомобилем непривычным способом, большая вероятность складывания прицепа даже при небольших ошибках управления, высокая трудность маневрирования задним ходом даже для профессионалов в условиях воздействия внешних неконтролируемых возмущений. К последним можно отнести: негоризонтальную поверхность, наличие существенных неровностей дороги, переменную плотность почвы и разные условия сцепления колес, возникающих, например, на пашне, на почве с высокой влажностью, заснеженной поверхности, на песке и др.
Известны системы помощи при движении задним ходом автомобиля с прицепом, например, патент RU 2575663 С1, 22.08.2014, МПК B62D 13/06, G07C 5/08.
Патент посвящен системе помощи при движении задним ходом с прицепом в транспортном средстве. Здесь рассматривается система, в которой заранее вводятся все необходимые кинематические параметры объекта «автомобиль-прицеп», задается водителем необходимая по условиям маневрирования кривизна пути прицепа на модуле ввода. На основе этих данных, а также показаний датчиков угла сцепки и среднего угла поворота управляемых колес автомобиля, регулятор формирует закон управления управляемыми колесами автомобиля для обеспечения заданной кривизны пути прицепа. Закон управления строится на основе аналитической зависимости, связывающей заданную кривизну и текущий угол сцепки с необходимым средним углом поворота управляемых колес автомобиля. Система привода управляемых колес автоматически отрабатывает этот закон. Также предполагается контроль угла сцепки для устранения возможности складывания системы.
В патенте предлагается для сокращения эксплуатационных затрат по вводу необходимых кинематических параметров, связанных с прицепом, записывать их на метку (радиометка или штрих-код), устанавливаемую на прицеп. С помощью видеосистемы заднего вида, или специального радиооборудования считывать эти данные перед маневрированием.
К недостаткам такой системы помощи следует отнести то, что закон управления рассчитан на отсутствие внешнего неконтролируемого возмущающего воздействия, что снижает точность управления при наличии такового. Запись информации о прицепе на метку требует дополнительные затраты на изготовление такой метки и специальное оборудование.
Известен патент RU 2608786 С2, 17.04.2015, МПК B62D 1/24, B62D 13/06, B60W 30/00.
Здесь предлагается структура системы помощи водителю, включающая следующие составные части: датчики угла сцепки, среднего угла отклонения управляемых колес автомобиля и скорости движения; модуль ввода заданного значения кривизны пути прицепа; контроллер, содержащий регулятор кривизны и регулятор угла сцепки; устройство автоматического привода управляемых колес автомобиля; человеко-машинный интерфейс. Водитель перед маневрированием назад должен ввести кинематические параметры объекта «автомобиль-прицеп» и задать требуемое значение кривизны пути прицепа. Далее водителю предлагается управлять только скоростью движения и по мере продвижения назад уточнять заданную кривизну. При этом регулятор кривизны по заданному значению таковой формирует на основе аналитической зависимости требуемое динамическое значение угла сцепки. Этот сигнал ограничивается величиной угла складывания (для устранения возможности складывания объекта «автомобиль-прицеп»), и далее отслеживается в замкнутом контуре, организованном регулятором угла сцепки с использованием обратной связи по текущему углу сцепки и ПИ-регулятора. Выходной сигнал этого регулятора подается на устройство привода управляемых колес автомобиля. Последнее, отрабатывая поступивший сигнал, отклоняет управляемые колеса автомобиля и обеспечивает движение прицепа с заданной кривизной.
Недостатком этой системы является необходимость измерения всех основных кинематических параметров объекта «автомобиль-прицеп» (колесную базу автомобиля, смещение сцепки и длину прицепа) и их ввода в систему управления. Это указывает на значительные эксплуатационные затраты, связанные с использованием рассматриваемой системы помощи водителю, особенно при частой смене прицепов. Также при расчете угла складывания не учитывается влияние внешнего возмущения.
В качестве прототипа предлагаемого изобретения выбрана заявка на изобретение RU 2018108958 А от 12.03.2018 (дата публикации: 12.09.2019, бюл. 26).
Система помощи при движении задним ходом объекта управления «автомобиль-прицеп» содержит датчики угла сцепки и среднего угла поворота управляемых колес автомобиля, модуль ввода данных, контроллер, исполнительное устройство, отклоняющее управляемые колеса автомобиля, и человеко-машинный интерфейс. Модуль ввода данных используется для задания требуемых значений балансировочного угла сцепки и коэффициента усиления закона управления. Контроллер в своем составе имеет идентификатор (алгоритм параметрической идентификации) и регулятор угла сцепки. Идентификатор, используя показания датчиков угла сцепки и угла поворота рулевых колес автомобиля, предназначен для предварительной настройки системы (в первом варианте предлагаемого изобретения) по команде водителя путем однократного оценивания и запоминания оценок кинематических параметров объекта управления, а также для текущего оценивания кинематических параметров объекта управления (во втором варианте предлагаемого изобретения). Регулятор угла сцепки формирует закон отклонения управляемых колес автомобиля по запомненным оценкам (в первом варианте предлагаемого изобретения), либо по текущим оценкам (во втором варианте предлагаемого изобретения). Контроллер также на основе полученных оценок кинематических параметров объекта управления формирует ограничение заданного балансировочного угла сцепки для исключения складывания связки «автомобиль-прицеп» и коэффициента усиления закона управления. Исполнительное устройство, отрабатывая сигнал от регулятора угла сцепки, автоматически поворачивает управляемые колеса автомобиля на требуемый угол. Человеко-машинный интерфейс обеспечивает переключение режимов работы системы и формирование информационных сигналов для водителя.
Недостатками данной заявки на изобретение является то, что она не учитывает известную априорную информацию об объекте управления «автомобиль-прицеп». Действительно, эта система предполагает стационарную установку на конкретный автомобиль, при которой всегда известны параметры: колесная база автомобиля и смещение сцепки. Кроме того, на автомобиле всегда имеется датчик скорости движения. Не учет этих известных данных осложняет построение адаптивной системы управления. Кроме того, в этой заявке на изобретение предлагается организация помощи водителю на основе автоматического отслеживания заданного водителем балансировочного значения угла сцепки. Реализуемое адаптивное управление системой «автомобиль-прицеп» при движении назад по балансировочному углу сцепки соответствует управлению по кривизне пути прицепа, но эта взаимосвязь выражается через сумму смещения сцепки и длины прицепа, т.е. является полуопределенной для водителя, а значит не всегда точной.
Еще одним недостатком рассматриваемой заявки на изобретение является то, что значение угла складывания рассчитывается на основе оценок, доставляемых идентификатором и используемых для формирования закона управления. Последние предполагают неточности, а значит, неточно вычисляется указанный угол с последующей неточностью формирования предупреждающего сигнала о складывании.
Раскрытие сущности изобретения
Задачей предлагаемого изобретения является повышение точности управления прицепом при действии неконтролируемых возмущений, удобства использования адаптивной системы помощи водителю легкового автомобиля с прицепом при движении назад, а также упрощение построения системы за счет использования известных кинематических параметров автомобиля: его колесной базы и смещения сцепки, использования сигнала о скорости движения, получаемого со штатного датчика автомобиля, и адаптации системы лишь к длине прицепа и внешнему неконтролируемому возмущению. А также в качестве показателя управления прицепом (задание водителем и автоматическое отслеживание системой) предлагается использовать относительную угловую скорость прицепа - угловую скорость прицепа, отнесенную к скорости движения автомобиля, и равную кривизне пути автомобиля на установившемся развороте.
Последнее объясняется следующим. Во-первых, на малых углах сцепки во время установившегося разворота относительная угловая скорость прицепа практически равна кривизне пути прицепа (отношение его угловой и линейной скоростей), которая используется в аналогах предлагаемого изобретения. Это объясняется равенством угловых скоростей автомобиля и прицепа и приблизительным равенством их линейных скоростей. Во-вторых, на больших углах сцепки, по мнению авторов, водителю удобней, привычней управлять прицепом по его относительной угловой скорости, а не по кривизне его пути, как это реализовано в аналогах предлагаемого изобретения.
Действительно, в типовой конфигурации «легковой автомобиль - прицеп» на больших углах сцепки в установившемся повороте скорость прицепа становится значительно меньше автомобильной. Водителю при мысленном построении требуемой траектории движения прицепа удобней использовать свой стереотип управления автомобилем (угол поворота руля водителя порождает соответствующую угловую скорость автомобиля, отнесенную к его линейной скорости, - кривизну пути автомобиля). Если на больших углах сцепки ориентироваться на кривизну пути прицепа, то более низкая его скорость относительно автомобильной породит и более низкую его угловую скорость, что противоречит сформированному стереотипу водителя по управлению автомобилем. Ввод водителем заданного значения относительной угловой скорости прицепа с помощью поворотной ручки специального модуля - аналога руля водителя и автоматическое отслеживание этой величины соответствует ожидаемой реакции прицепа по сложившемуся стереотипу как реагирует автомобиль на поворот руля.
Задача изобретения реализуется за счет того, что в контроллере предлагается строить адаптивный регулятор относительной угловой скорости прицепа, подстраивающийся под априорно неопределенные длину прицепа и внешние возмущения. Формируемый закон отклонения управляемых колес автомобиля будет основываться на представленной водителем очень приблизительной оценки длины прицепа, полученной им доступными средствами, а также на оценках кинематических параметров объекта «автомобиль-прицеп» и внешнего возмущения, доставляемых алгоритмом текущей идентификации (идентификатором), а также с использованием неявной эталонной модели. В условиях функционирования замкнутой системы управления для устранения складывания прицепа водителем будет ограничиваться заданное значение относительной угловой скорости прицепа на основе сигнала о приближении среднего угла управляемых колес к своему ограничению.
Алгоритм работы системы формируется с учетом возможного присутствия внешнего возмущения.
Краткое описание чертежей
На фиг. 1 представлены основные кинематические соотношения объекта управления «автомобиль-прицеп» (вид сверху).
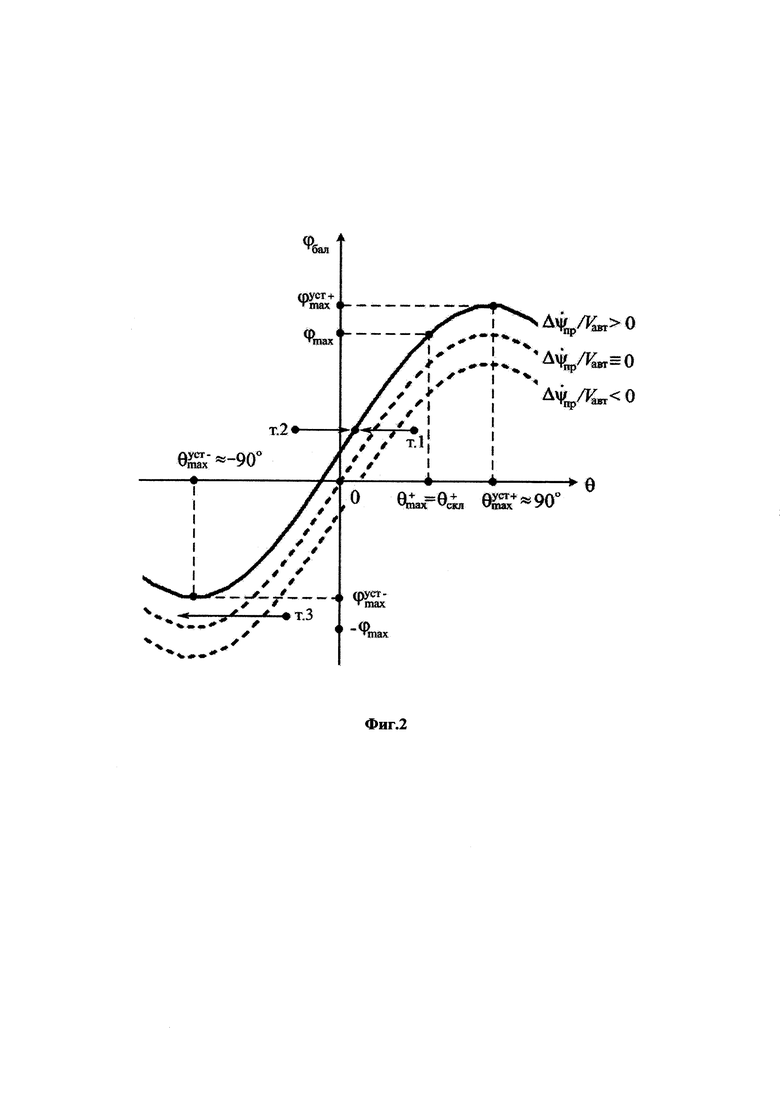
На фиг. 2 представлена балансировочная зависимость управляющего угла от угла сцепки и данные для расчета.
На фиг. 3 представлена структура предлагаемой системы управления.
На фиг. 4 представлены результаты исследования управления объектом «автомобиль-прицеп» при движении назад с реализацией адаптивного в текущем времени закона управления.
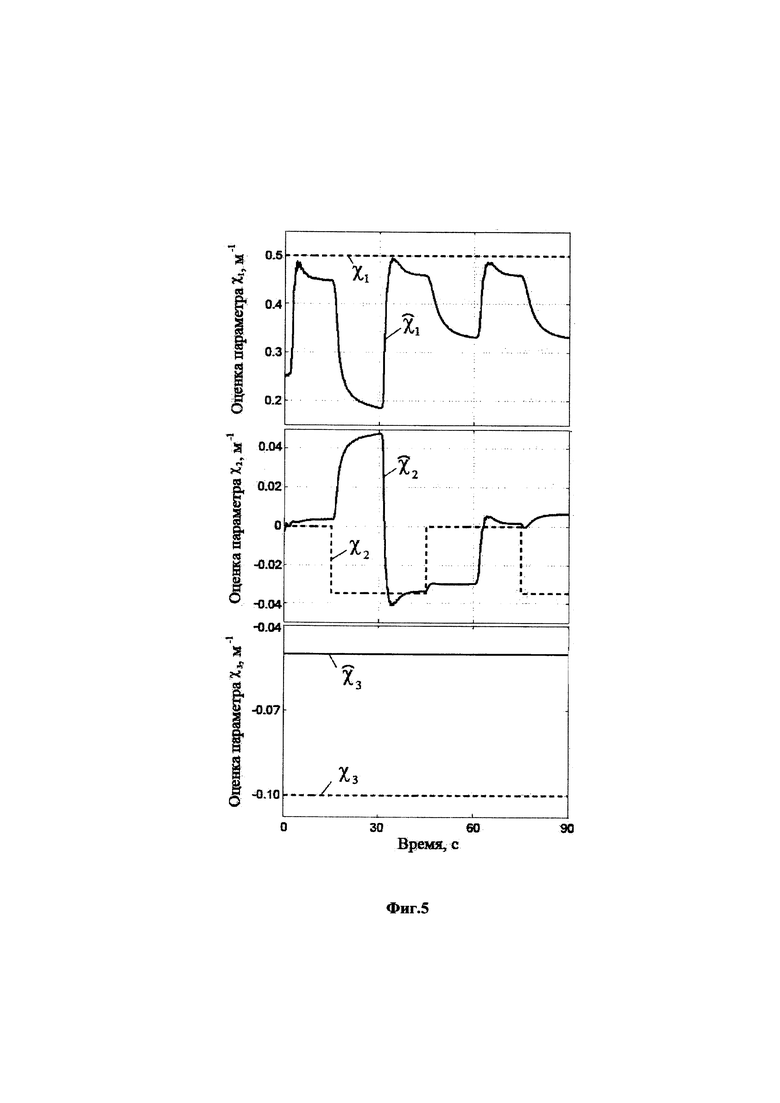
На фиг. 5 представлены текущие оценки, доставляемые идентификатором во время текущего функционирования адаптивного управления. Осуществление изобретения
На фиг. 1 и в дальнейших рассуждениях приняты следующие обозначения: 1 - автомобиль; 2 - продольная ось автомобиля; 3 - управляемые колеса автомобиля; 4 - ось управляемых колес автомобиля; 5 - ось заднего моста автомобиля; 6 - ось колес прицепа; 7 - прицеп; 8 - продольная ось прицепа; 9 - дышло прицепа; 10 - точка сцепки дышла прицепа с автомобилем;
ϕ - управляющий угол, или средний угол отклонения управляемых колес автомобиля 3, он обычно ограничен конструкционно в виде:  также будем рассматривать величину
также будем рассматривать величину  - ограничение управляющего угла по устойчивости, удовлетворяющего соотношению
- ограничение управляющего угла по устойчивости, удовлетворяющего соотношению  с точки зрения обеспечения устойчивости объекта «автомобиль-прицеп» при движении вперед; в общем случае при наличии внешнего возмущения эта переменная имеет два различных по модулю значения, которые вместе с общим символом
с точки зрения обеспечения устойчивости объекта «автомобиль-прицеп» при движении вперед; в общем случае при наличии внешнего возмущения эта переменная имеет два различных по модулю значения, которые вместе с общим символом  обозначим как:
обозначим как:  - с положительным знаком и
- с положительным знаком и  - с отрицательным знаком (эти переменные определятся далее);
- с отрицательным знаком (эти переменные определятся далее);
θ - угол сцепки, или угол отклонения продольной оси прицепа 8 от продольной оси автомобиля 2; примем во внимание следующие значения угла сцепки: θбал - угол сцепки в установившемся развороте, когда  θmax - максимальное по модулю значение величины θбал при движении вперед (также для общего случая имеет две величины - положительную и отрицательную:
θmax - максимальное по модулю значение величины θбал при движении вперед (также для общего случая имеет две величины - положительную и отрицательную:  и
и  ); θскл - угол складывания, значение угла сцепки, при превышении по модулю которого во время движения назад начинается непроизвольное его увеличение с невозможностью его компенсации из-за ограниченности ϕ (также для общего случая имеет две величины - положительную и отрицательную:
); θскл - угол складывания, значение угла сцепки, при превышении по модулю которого во время движения назад начинается непроизвольное его увеличение с невозможностью его компенсации из-за ограниченности ϕ (также для общего случая имеет две величины - положительную и отрицательную:  и
и  ); угол сцепки, соответствующий
); угол сцепки, соответствующий  обозначим как
обозначим как 
ψавт, ψпр - угол поворота автомобиля 1 и прицепа 7 (соответственно) от какого-то направления, например, заданного (на рисунке обозначено вертикальной линией);
Vупр, Vавт, Vпр - скорость автомобиля по управляемым колесам 3, продольная скорость
автомобиля 1 (скорость автомобиля) и скорость прицепа 7, соответственно, вектор скорости автомобиля по управляемым колесам будем рассматривать с точкой приложения в центре оси вращения управляемых колес 4; заметим, что Vавт=Vупрcosϕ;
a, b, с - кинематические параметры объекта управления «автомобиль-прицеп» (положительные ненулевые числа), соответственно: колесная база автомобиля, или расстояние между осями вращения колес автомобиля (4 и 5); смещение сцепки, или расстояние от оси заднего моста автомобиля 5 до точки сцепки 10; длина прицепа, или расстояние от точки сцепки 10 дышла прицепа 9 до оси вращения колес прицепа 6 (эффективной оси для многоосного прицепа); примем, в соответствии с типовыми соотношениями транспортного
средства «легковой автомобиль - прицеп»: с2>>b2, а2>>b2; также введем термины: «короткий прицеп» - прицеп с постоянно устойчивым поведением угла сцепки при движении вперед, при отсутствии внешнего возмущения этому понятию соответствует условие  ; иначе - «длинный прицеп»; при наличии внешнего возмущения понятию «короткий прицеп» соответствует условие
; иначе - «длинный прицеп»; при наличии внешнего возмущения понятию «короткий прицеп» соответствует условие  иначе - «длинный прицеп» (это будет обсуждено далее);
иначе - «длинный прицеп» (это будет обсуждено далее);
 - угловая скорость прицепа 7, появляющаяся из-за внешних неконтролируемых возмущений, природа возникновения которых указана выше; можно показать, что к этой переменной можно свести внешние возмущения, действующие и на автомобиль в виде дополнительной его угловой скорости; будем считать эту величину ограниченной.
- угловая скорость прицепа 7, появляющаяся из-за внешних неконтролируемых возмущений, природа возникновения которых указана выше; можно показать, что к этой переменной можно свести внешние возмущения, действующие и на автомобиль в виде дополнительной его угловой скорости; будем считать эту величину ограниченной.
Для составления математического описания объекта управления «автомобиль-прицеп» приняты следующие допущения:
- назад автомобиль движется с относительно низкой, но ненулевой постоянной скоростью;
- нет бокового юза автомобиля, при движении назад не будет учитываться эффект бокового увода на повороте;
- не учитывается динамика движения, в частности, получаемые соотношения не зависят от ускорений.
Известно [Литвинов А.С., Фаробин Я.Е. Автомобиль: Теория эксплуатационных свойств - М. Машиностроение, 1989], что угловая скорость автомобиля определяется зависимостью:

Из фиг. 1 можно определить, что

На точку сцепки 10 при движении автомобиля действуют два вектора линейной скорости: вектор поступательного движения автомобиля, соответствующий продольной скорости автомобиля (Vавт=Vупрcosϕ), и вектор  соответствующий вращательному движению автомобиля. Исходя из этих векторов, определим линейную и угловую скорость прицепа. Проецируя эти векторы на продольную ось прицепа (вдоль дышла) и ось, перпендикулярную ей, с учетом (1) и действия
соответствующий вращательному движению автомобиля. Исходя из этих векторов, определим линейную и угловую скорость прицепа. Проецируя эти векторы на продольную ось прицепа (вдоль дышла) и ось, перпендикулярную ей, с учетом (1) и действия  можно найти линейную и угловую скорости прицепа:
можно найти линейную и угловую скорости прицепа:


Поскольку из (2) следует, что  то по зависимостям (1) и (4) несложно определить скорость изменения угла 9:
то по зависимостям (1) и (4) несложно определить скорость изменения угла 9:

Зависимость (5) можно переписать по-другому - внося член  внутрь скобок, прописывая полученное слагаемое через, а также используя известное тригонометрическое равенство:
внутрь скобок, прописывая полученное слагаемое через, а также используя известное тригонометрическое равенство:  [Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. - М.: Наука, 1986], комбинируя по этой формуле синусы и косинусы по ϕ, можно найти:
[Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. - М.: Наука, 1986], комбинируя по этой формуле синусы и косинусы по ϕ, можно найти:

где  - положительный коэффициент усиления;
- положительный коэффициент усиления;
 - член, определяющий влияние внешнего возмущения;
- член, определяющий влияние внешнего возмущения;
 - балансировочная зависимость управляющего угла автомобиля по углу θ с учетом внешнего возмущения; или значение ϕ такое, что если его зафиксировать при
- балансировочная зависимость управляющего угла автомобиля по углу θ с учетом внешнего возмущения; или значение ϕ такое, что если его зафиксировать при  то текущее значение угла сцепки будет находиться в балансировочном положении: θ=θбал≡const, или объект «автомобиль-прицеп» будет находиться в установившемся развороте; из представленной зависимости следует, что при одинаковости всех составляющих и наличии внешнего возмущения при движении вперед и назад значения ϕбал будут разными; на фиг. 2 представлена рассматриваемая балансировочная зависимость для типовой конфигурации объекта «автомобиль - прицеп» и некоторые ее параметры.
то текущее значение угла сцепки будет находиться в балансировочном положении: θ=θбал≡const, или объект «автомобиль-прицеп» будет находиться в установившемся развороте; из представленной зависимости следует, что при одинаковости всех составляющих и наличии внешнего возмущения при движении вперед и назад значения ϕбал будут разными; на фиг. 2 представлена рассматриваемая балансировочная зависимость для типовой конфигурации объекта «автомобиль - прицеп» и некоторые ее параметры.
Рассмотрим производную балансировочной зависимости по углу сцепки:

Она положительна при θ=0, что указывает на возрастающий характер балансировочной зависимости в пределах аргументов  соответствующих экстремальным значениям функции
соответствующих экстремальным значениям функции  последние соответствуют нулевому значению найденной производной и, с учетом принятого условия с2>>b2, ограниченности
последние соответствуют нулевому значению найденной производной и, с учетом принятого условия с2>>b2, ограниченности  и известных тригонометрических зависимостей [Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. - М.: Наука, 1986], равны:
и известных тригонометрических зависимостей [Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. - М.: Наука, 1986], равны:

Несложно установить, что при отсутствии внешнего возмущения  а значит в силу принятого - этот угол по модулю немного больше 90°. Значит, действие внешнего возмущения смещает величину
а значит в силу принятого - этот угол по модулю немного больше 90°. Значит, действие внешнего возмущения смещает величину  правда незначительно из-за малости параметра b (для типовых случаев - единицы градусов).
правда незначительно из-за малости параметра b (для типовых случаев - единицы градусов).
Изучим динамику изменения угла θ в соответствии с равенством (6) при движении вперед (Vавт>0).
Вначале рассмотрим случай, когда значение управляющего угла удовлетворяет условиям:  т.е. текущее значение управляющего угла меньше, чем его балансировочное значение, соответствующее текущему углу θ с начальной величиной, не выходящей за пределы
т.е. текущее значение управляющего угла меньше, чем его балансировочное значение, соответствующее текущему углу θ с начальной величиной, не выходящей за пределы  и при постоянном внешнем возмущении и скорости автомобиля (т. 1 на фиг. 2). Из зависимости (6) следует, что это порождает
и при постоянном внешнем возмущении и скорости автомобиля (т. 1 на фиг. 2). Из зависимости (6) следует, что это порождает  т.е. уменьшение угла θ. А поскольку функция
т.е. уменьшение угла θ. А поскольку функция  возрастающая, то при этом будет уменьшаться и сама эта функция. Это будет продолжаться до тех пор, пока не наступит равенство
возрастающая, то при этом будет уменьшаться и сама эта функция. Это будет продолжаться до тех пор, пока не наступит равенство  т.е. не наступит установившийся разворот.
т.е. не наступит установившийся разворот.
Если же рассмотреть случай  при тех же условиях (т. 2 на фиг. 2), то из (6) следует, что этому соответствует
при тех же условиях (т. 2 на фиг. 2), то из (6) следует, что этому соответствует  т.е. увеличение угла θ.
т.е. увеличение угла θ.
Если предполагать, что при том не нарушается ограничение  то функция
то функция  остается возрастающей и увеличивается, пока не наступит, как и в предыдущем случае, установившийся разворот. В противном случае, соответствующем, например, т. 3 на фиг. 2, получим неустойчивое поведение угла θ.
остается возрастающей и увеличивается, пока не наступит, как и в предыдущем случае, установившийся разворот. В противном случае, соответствующем, например, т. 3 на фиг. 2, получим неустойчивое поведение угла θ.
Таким образом, здесь требованием устойчивости является условие  или, в соответствии с (6) и определением θmax и
или, в соответствии с (6) и определением θmax и  при заданных кинематических параметрах а, b, с и внешнем возмущении должно выполняться условие:
при заданных кинематических параметрах а, b, с и внешнем возмущении должно выполняться условие:

Если  что означает постоянное выполнение неравенства (8), можно считать, что при движении вперед (Vaвт>0) при любом постоянном управляющем угле
что означает постоянное выполнение неравенства (8), можно считать, что при движении вперед (Vaвт>0) при любом постоянном управляющем угле  То есть движение системы по углу сцепки является устойчивым. Если
То есть движение системы по углу сцепки является устойчивым. Если  указанный вывод справедлив только внутри ограничения (8).
указанный вывод справедлив только внутри ограничения (8).
Используя подход, подобный тому, что был применен при выводе уравнения (6), только комбинируя члены по углу θ, можно найти зависимость, обратную к 
если для условия существования функции  ее аргумент не превышает по модулю единицу. Отсюда, в соответствии с (6) и определением
ее аргумент не превышает по модулю единицу. Отсюда, в соответствии с (6) и определением  можно найти аналитическое выражение последнего:
можно найти аналитическое выражение последнего:

Следовательно, условие (8), или  соответствует введенному понятию «короткий прицеп» (иначе «длинный прицеп»). Например, для того, чтобы при ϕmax=30°, прицеп был «коротким» при отсутствии внешнего возмущения, достаточно, чтобы с≤1.73а.
соответствует введенному понятию «короткий прицеп» (иначе «длинный прицеп»). Например, для того, чтобы при ϕmax=30°, прицеп был «коротким» при отсутствии внешнего возмущения, достаточно, чтобы с≤1.73а.
Если же автомобиль движется назад (Vавт<0) и выполнено неравенство (8) («прицеп короткий») при тех же условиях, из подобных рассуждений следует, что система точно неустойчива, чем объясняются все проблемы управления таким движением. Из определения θmax, θскл следует, что в рассматриваемом случае θскл=θmax. Уравнение (6) здесь будет иметь вид:

Если неравенство (8) несправедливо («прицеп длинный»), то при движении назад и  на основании подобных рассуждений можно утверждать, что модуль угла сцепки будет уменьшаться, т.е. налицо устойчивое поведение угла θ. А это значит, что с «длинным прицепом» при движении назад угол складывания отсутствует (см. фиг. 2, левую часть).
на основании подобных рассуждений можно утверждать, что модуль угла сцепки будет уменьшаться, т.е. налицо устойчивое поведение угла θ. А это значит, что с «длинным прицепом» при движении назад угол складывания отсутствует (см. фиг. 2, левую часть).
Из рассмотренных двух случаев движения назад и (9) можно описать угол складывания с «коротким прицепом», т.е. когда 

Отсюда можно видеть, что из-за действия внешнего возмущения угол складывания зависит от знака управляющего угла, величины внешнего возмущения и направления скорости автомобиля.
Из определения относительной угловой скорости прицепа (обозначим ее как κ), соотношений (1) и (4) можно найти ее значение на развороте:

Далее это уравнение будем использовать как исходное при синтезе адаптивного закона управления, обеспечивающего движение назад с заданной относительной угловой скоростью прицепа.
Очевидно, что на установившемся развороте при  соответствующему балансировочному значению относительной угловой скорости прицепа (обозначим как κбал), на основании (2)
соответствующему балансировочному значению относительной угловой скорости прицепа (обозначим как κбал), на основании (2) 

Значит, на основании определения  и (8), можно найти максимальное значение относительной угловой скорости прицепа на установившемся развороте:
и (8), можно найти максимальное значение относительной угловой скорости прицепа на установившемся развороте:

Примем, что заданное значение относительной угловой скорости прицепа (обозначим как κзад) будет формироваться водителем с ограниченной скоростью изменения.
Поскольку величина  описываемая равенством из (8), по условию не известна, то на основе представленного равенства κзад будем формировать со следующим ограничением:
описываемая равенством из (8), по условию не известна, то на основе представленного равенства κзад будем формировать со следующим ограничением:

Первое условие из (15) соответствует «короткому прицепу», что следует из этого понятия и предыдущего равенства. Второе условие из (15) соответствует «длинному прицепу» с наблюдением водителя за углом сцепки и ограничением κзад из естественного для водителя условия не приближения этого угла к величине ±90°.
Рассмотрим подробнее условие «длинного прицепа», когда  Из (14) и (9) следует, что с увеличением длины прицепа для достижения одного и того же значения κбал требуется все большее по модулю значение θбал, а значит и ϕбал. Но увеличение модуля управляющего угла ведет к тому, что
Из (14) и (9) следует, что с увеличением длины прицепа для достижения одного и того же значения κбал требуется все большее по модулю значение θбал, а значит и ϕбал. Но увеличение модуля управляющего угла ведет к тому, что  Это на основании (7) значит, что
Это на основании (7) значит, что  Отсюда второе из соотношений (15).
Отсюда второе из соотношений (15).
Для синтеза закона управления будем считать, что колесная база автомобиля и смещение сцепки (параметры а, b) известны, переменные ϕ, θ, Vавт непосредственно измеряются. Сигнал  определяется численным дифференцированием по текущему θ (со сглаживанием), сигнал
определяется численным дифференцированием по текущему θ (со сглаживанием), сигнал  определяется аналогично.
определяется аналогично.
Длину прицепа будем формировать в виде оценки:  («крышка» над символом здесь и далее означает его оценку). Примем, что оценка
(«крышка» над символом здесь и далее означает его оценку). Примем, что оценка  находится внутри указанного интервала (обоснование этих границ будет рассмотрено далее):
находится внутри указанного интервала (обоснование этих границ будет рассмотрено далее):

Поскольку требования к оценке очень простые (допустима неточность ±50%), предлагается определять ее водителем накануне использования системы, измеряя длину прицепа простыми методами: «на глаз», меряя «футами», шагами и т.п.
Из (1), (2) и (13) следует, что  поэтому уравнение (13) можно переписать в виде
поэтому уравнение (13) можно переписать в виде

где  - параметры уравнения (17), два первых из них будем считать неизвестными, а третий можно представим с использованием полученной от водителя оценки
- параметры уравнения (17), два первых из них будем считать неизвестными, а третий можно представим с использованием полученной от водителя оценки 
 - вектор неизвестных параметров;
- вектор неизвестных параметров;
 - вектор регрессоров (в терминах регрессионного анализа); верхний индекс «т» обозначает операцию транспонирования.
- вектор регрессоров (в терминах регрессионного анализа); верхний индекс «т» обозначает операцию транспонирования.
Для поиска неизвестных параметров будем использовать алгоритм текущей идентификации, в качестве которого применим рекуррентный метод наименьших квадратов с фактором забывания [Льюнг Л. Идентификация систем. Теория для пользователя: Пер. с англ. / Под ред. Я.З. Цыпкина. - М.: Наука, 1991], как наиболее эффективный:
где i=0,1,2,… - номера дискретных измерений;
Гi - матричный коэффициент усиления алгоритма идентификации;
εi - невязка идентификации;
 - отклик объекта;
- отклик объекта;
γ - большое положительное число;
Е - единичная матрица размера 2×2;
β:0<β<1, β→1 - назначаемый фактор забывания прошлых измерений для того, чтобы алгоритм отслеживал изменение искомых параметров.
Предположим, что, алгоритм текущей идентификации (18) обеспечивает с первых шагов своей работы сходимость модуля невязки идентификации в область, близкую к нулю (далее это будет обсуждено, также см. фиг. 4). Тогда, вместо зависимости (17), можно записать в дискретном виде динамику изменения относительной угловой скорости прицепа при движении назад через текущие оценки неизвестных параметров:

Назначим неявную устойчивую эталонную модель, формализующую требования к замкнутой системе управления, описываемую дискретно по форме (19):

где ам - назначенный положительный постоянный параметр, определяющий скорость переходного процесса;
 - интеграл по времени от κзад;
- интеграл по времени от κзад;
 - выходная переменная модели, равная интегралу от κм;
- выходная переменная модели, равная интегралу от κм;
 - начальные значения
- начальные значения 
Приравнивая левые части уравнений (19) и (20), подставляя вместо  величину
величину  можно найти закон управления, который будет обеспечивать поведение относительной угловой скорости прицепа в замкнутой системе управления такое, которое предписано эталоном (20):
можно найти закон управления, который будет обеспечивать поведение относительной угловой скорости прицепа в замкнутой системе управления такое, которое предписано эталоном (20):

где  - функция ограничения аргумента функции
- функция ограничения аргумента функции  пределами от - ϕmax до ϕmax.
пределами от - ϕmax до ϕmax.
Действительно, если (21) подставить в (19), то получим описание замкнутой системы управления, соответствующее эталону (20), если аргумент функции не выходит на указанное ограничение. При этом обеспечивается  , а значит
, а значит 
Для того, чтобы обеспечить условие нашего предположения о сходимости невязки идентификации  в условиях замкнутой системы управления с законом управления (21) и назначения постоянной оценки
в условиях замкнутой системы управления с законом управления (21) и назначения постоянной оценки  (параметра при управлении) доказано [Круглов С.П. Сходимость невязки идентификации в системе управления с параметрической адаптацией// «Информационные технологии и математическое моделирование в управлении сложными системами»: электрон, науч. журн. - 2019. - No1. - С. 25-37 - Режим доступа: http://ismm-irgups.ru/toma/12-2019, свободный. - Загл. с экрана. - Яз. рус, англ.], что для этого достаточными являются требования к этой оценке:
(параметра при управлении) доказано [Круглов С.П. Сходимость невязки идентификации в системе управления с параметрической адаптацией// «Информационные технологии и математическое моделирование в управлении сложными системами»: электрон, науч. журн. - 2019. - No1. - С. 25-37 - Режим доступа: http://ismm-irgups.ru/toma/12-2019, свободный. - Загл. с экрана. - Яз. рус, англ.], что для этого достаточными являются требования к этой оценке:

Отсюда следует справедливость утверждения о достаточной точности оценки  в виде неравенства (16). Данные требования являются частью «упрощенных условий адаптируемости».
в виде неравенства (16). Данные требования являются частью «упрощенных условий адаптируемости».
Для исключения появления в замкнутой адаптивной системе управления высокочастотных составляющих из-за работы алгоритма (18) требуется пропускать закон управления (21) через низкочастотный фильтр, их устраняющий, но не вносящий существенных искажений в низкочастотный процесс управления (относительно указанного) [Круглов С.П. Условия адаптируемости систем управления с идентификатором и эталоном: монография //LAP LAMBERT Academic Publishing GmbH & Co. KG, Saarbucken, Deutschland - 2012].
Можно отметить, что поскольку адаптивная система управления подстраивается под текущие характеристики системы управления, то синтезируемый закон управления (21) учитывает все неточности и допущения в исходном описании кинематики и динамики системы управления, за исключением, конечно, ограничений на управление.
Также при целевом использовании системы помощи при движении назад предлагается формировать предупреждающий сигнал водителю (в виде логического сигнала S) о возможности складывания системы «автомобиль - прицеп» при достижении угла сцепки предельного своего значения - угла складывания. Получив этот сигнал, водитель должен уменьшить заданную относительную угловую скорость прицепа. Рассмотрим логику формирования этого сигнала.
Выше говорилось о том, что в силу свойств адаптивной системы управления, если сформированное по (21) отклонение управляющего угла не выходит за его ограничения, замкнутая система управления близка к поведению назначенного эталона. То есть движение прицепа будет ожидаемым, устойчивым. Следовательно, выход управляющего угла на ограничение, не может быть ничем иным, как достижение невозможности «вести» объект управления по эталону, или начало неустойчивого движения - складывания прицепа. Это можно использовать для формирования требуемого сигнала. Отсюда логический сигнал S целесообразно формировать по следующей логической зависимости:

где Δϕ - маленькая заданная положительная величина в несколько градусов, подбираемая экспериментально, предназначенная для выработки сигнала «заранее» до достижения управляющим углом величины ϕmax, а также для «запаса» управляющего воздействия при достижении угла сцепки значения, близкого к углу складывания; вторая часть зависимости  исключает формирование сигнала в начале маневра, характеризующегося разными знаками производных управляющего угла и угла сцепки (см. фиг. 4); нижний индекс τ означает временную задержку, подбираемую экспериментально, в формировании сигнала для исключения его выработки при кратковременном выходе управляющего угла в область ϕmax.
исключает формирование сигнала в начале маневра, характеризующегося разными знаками производных управляющего угла и угла сцепки (см. фиг. 4); нижний индекс τ означает временную задержку, подбираемую экспериментально, в формировании сигнала для исключения его выработки при кратковременном выходе управляющего угла в область ϕmax.
Исследования на компьютерной модели доказали справедливость такого решения.
На фиг. 3 представлена структура предлагаемой системы управления.
Информация об угле сцепки, среднем угле поворота управляемых колес и скорости автомобиля поступают с датчика угла сцепки 11, датчика среднего угла поворота управляемых колес 12 и датчика скорости автомобиля 13 в контроллер 15. Часть этих датчиков могут быть из состава штатного оборудования автомобиля. Модуль ввода заданного значения относительной угловой скорости прицепа 14, имея ограничение (15), используется для ввода в систему водителем текущего значения заданной относительной угловой скорости прицепа в процессе маневрирования задним ходом по обзору за окружающей обстановкой и за своим прицепом через зеркала или видеосистему заднего вида автомобиля. При этом водитель учитывает сигнал по зависимости (23) от человеко-машинного интерфейса 18 о достижении угла складывания. Модуль ввода заданного значения относительной угловой скорости прицепа 14 желательно строить с поворотной ручкой - аналогом руля водителя.
Контроллер 15 в своем составе имеет идентификатор 16 и регулятор относительной угловой скорости прицепа 17. Идентификатор 16 используется для оценки кинематических параметров объекта и внешнего возмущения, необходимых при формировании требуемого отклонения управляемых колес автомобиля. Он построен по зависимостям (17), (18). Регулятор относительной угловой скорости прицепа 17 построен по зависимостям (17), (19) - (21). Контроллер 15 также используется для формирования сигнала о достижения угла складывания по зависимости (23).
Сформированный закон отклонения управляемых колес автомобиля автоматически отрабатывается в системе усилителя руля 19, выполняющей роль исполнительного устройства и автоматически отклоняющей управляемые колеса автомобиля 3. Названная система предполагает отключение этого режима, если водитель взял управление на себя (как это реализовано в прототипе).
Человеко-машинный интерфейс 18 используется для управления всей системой помощи: ее включение и выключение; для ввода исходной информации: а - колесной базы автомобиля, b - смещения сцепки, ϕmax - конструкционного ограничения управляющего угла,  - оценки длины прицепа для формирования закона управления, полученной из приблизительных измерений водителем (достаточна 50% точность), параметров γ, β,
- оценки длины прицепа для формирования закона управления, полученной из приблизительных измерений водителем (достаточна 50% точность), параметров γ, β,  алгоритма идентификации (18), ам - параметра эталонной модели (20), параметров из зависимости (23) Δϕ и τ (все эти параметры, за исключением
алгоритма идентификации (18), ам - параметра эталонной модели (20), параметров из зависимости (23) Δϕ и τ (все эти параметры, за исключением  могут быть предустановленными на этапе монтирования рассматриваемой системы на автомобиль); а также для информирования водителя о достижении значения угла складывания по сигналу от контроллера 15.
могут быть предустановленными на этапе монтирования рассматриваемой системы на автомобиль); а также для информирования водителя о достижении значения угла складывания по сигналу от контроллера 15.
Адаптивная система помощи водителю легкового автомобиля с прицепом при движении задним ходом работает следующим образом.
Перед использованием системы водитель с помощью человеко-машинного интерфейса 18 вводит исходные данные в систему: а - колесную базу автомобиля, b - смещение сцепки, ϕmax - конструкционное ограничение управляющего угла, - оценку длины прицепа для синтеза закона управления по приблизительным измерениям (достаточна 50% точность), параметры γ, β,  алгоритма идентификации (18), aм - параметр эталонной модели (20), параметры из зависимости (23) Δϕ и τ (все эти параметры, за исключением
алгоритма идентификации (18), aм - параметр эталонной модели (20), параметры из зависимости (23) Δϕ и τ (все эти параметры, за исключением  могут быть предустановленными на этапе монтирования рассматриваемой системы на автомобиль).
могут быть предустановленными на этапе монтирования рассматриваемой системы на автомобиль).
Перед целевым использованием системы для автоматизации движения системы «автомобиль-прицеп» назад водитель с помощью человеко-машинного интерфейса 18 включает систему. Далее водитель по обзору через зеркала или видеосистему заднего вида автомобиля смотрит за окружающей обстановкой, своим прицепом, задает скорость движения назад, а также с помощью модуля ввода заданной относительной угловой скорости прицепа 14 вводит в систему текущее значение заданной относительной угловой скорости прицепа с ограничением (15), в частности, предполагающим ограничение вводимой водителем величины, если модуль угла сцепки становится большим, близким к 90° (эта ситуация может возникнуть при «длинном прицепе»). Одновременно водитель учитывает сигнал с человеко-машинного интерфейса 18 о достижении угла складывания. Если таковой поступит, то водитель должен уменьшить модуль указанной заданной величины для устранения возможности складывания системы. Регулятор относительной угловой скорости прицепа 17 формирует текущее значение среднего угла управляемых колес автомобиля 3, а система усилителя руля 19 отрабатывает его.
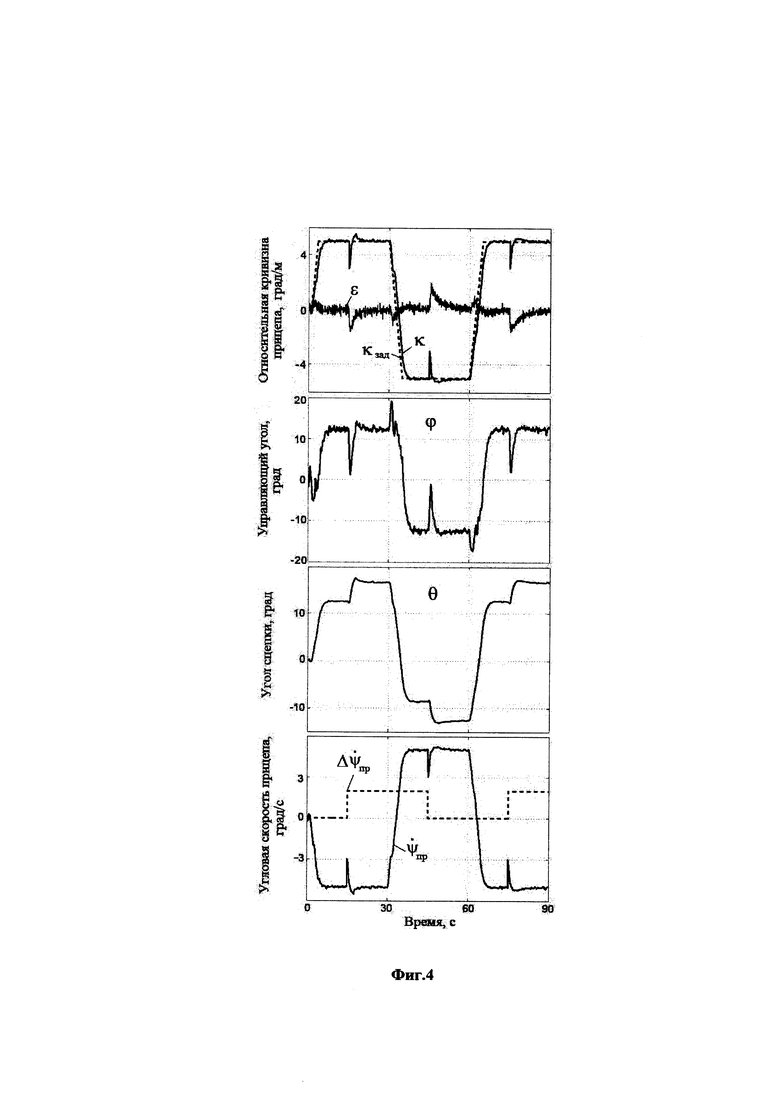
На фиг. 4, 5 представлены результаты моделирования процесса управления объектом «автомобиль-прицеп» при движении назад с адаптивным управлением по зависимостям (17), (18), (20), (21).
Принято в качестве параметров системы: а=2.5 м, b=0.5 м, с=2 м («короткий прицеп»); скорость автомобиля: Vавт=-1 м/с; сигналы θ и ϕ измеряются с шумами, представляющими собой гауссовский случайный процесс с нулевым средним и среднеквадратическим отклонением 0.03 град. Для снижения уровня помех, все сигналы уравнения (17) фильтровались на апериодическом звене с постоянной времени 0.2 с. Параметр эталона: ам=1.0 с-1. Временной шаг дискретности 0.1с. Параметры алгоритма идентификации: γ=10, β=0.998. Значение оценки  (при других значениях этой оценки из диапазона по (16) качество изменяется незначительно). Начальное значение оценки
(при других значениях этой оценки из диапазона по (16) качество изменяется незначительно). Начальное значение оценки  выбиралось в соответствии с указанным значением
выбиралось в соответствии с указанным значением  а для
а для  начальное значение нулевое. Закон управления (21) фильтровался на апериодическом звене с единичным коэффициентом усиления и постоянной времени 0.1с. Зависимость κзад по времени представлена на фиг. 4. Заметим, что при указанных параметрах в соответствии с (15)
начальное значение нулевое. Закон управления (21) фильтровался на апериодическом звене с единичным коэффициентом усиления и постоянной времени 0.1с. Зависимость κзад по времени представлена на фиг. 4. Заметим, что при указанных параметрах в соответствии с (15)  При отсутствии внешнего возмущения параметр
При отсутствии внешнего возмущения параметр 
Результаты показывают высокую эффективность адаптивного управления: даже при действии существенного внешнего неконтролируемого возмущения и шумов измерений система остается устойчивой и достаточно точно отслеживает заданное значение относительной угловой скорости прицепа. При этом текущие значения оценок, далеки от точных своих значений. Подобные результаты были получены и при других параметрах объекта «автомобиль-прицеп».
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система помощи при движении задним ходом автомобиля с прицепом | 2018 |
|
RU2702199C2 |
| Мобильная система помощи водителю автомобиля с прицепом при маневрировании задним ходом | 2018 |
|
RU2694645C1 |
| Способ идентификации максимальных значений коэффициентов трения скольжения колёс автомобиля и прицепа в составе системы управления движением автопоезда | 2023 |
|
RU2811997C1 |
| Система идентификации максимальных значений коэффициентов трения скольжения колёс автомобиля и прицепа в составе системы управления движением автопоезда | 2023 |
|
RU2812025C1 |
| СИСТЕМА ПОМОЩИ ПРИ ДВИЖЕНИИ ЗАДНИМ ХОДОМ С ПРИЦЕПОМ | 2015 |
|
RU2608786C2 |
| СИСТЕМА ПОМОЩИ ПРИ ДВИЖЕНИИ ТРАНСПОРТНОГО СРЕДСТВА ЗАДНИМ ХОДОМ С ПРИЦЕПОМ | 2015 |
|
RU2627219C2 |
| СПОСОБ И СИСТЕМА ДЛЯ КОНТРОЛЯ РАЗМЕЩЕНИЯ МЕТКИ НА ПРИЦЕПЕ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2574505C1 |
| СИСТЕМА И СПОСОБ КОНТРОЛЯ СОЕДИНЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА С ПРИЦЕПОМ | 2014 |
|
RU2573691C1 |
| СИСТЕМА И СПОСОБ ПОМОЩИ ВОДИТЕЛЮ ТРАНСПОРТНОГО СРЕДСТВА С ПРИЦЕПОМ | 2014 |
|
RU2574042C1 |
| СИСТЕМА И СПОСОБ КАЛИБРОВКИ СИСТЕМЫ ПОМОЩИ ПРИ ДВИЖЕНИИ ЗАДНИМ ХОДОМ ТРАНСПОРТНОГО СРЕДСТВА С ПРИЦЕПОМ | 2015 |
|
RU2584372C1 |


Изобретение относится к области транспортного машиностроения. Адаптивная система помощи водителю легкового автомобиля с прицепом при движении задним ходом включает: датчик угла сцепки, датчик среднего угла поворота управляемых колес автомобиля, модуль ввода заданного значения регулируемой величины, контроллер, регулятор, систему усилителя руля, человеко-машинный интерфейс и датчик скорости автомобиля. Способ использования упомянутой адаптивной системы помощи водителю заключается в том, что: - определяют длину прицепа и вводят ее в систему, при этом остальные кинематические параметры заранее введены в систему; - на основе условий маневрирования, наличия сигнала о возможности складывания прицепа и достижения текущего угла сцепки вводят значение относительной угловой скорости прицепа; - сигнал о возможности складывания прицепа формируют на основе достижения средним углом управляемых колес ограничивающих значений. Достигается повышение точности управления автомобиля с прицепом. 2 н.п. ф-лы, 5 ил.
1. Адаптивная система помощи водителю легкового автомобиля с прицепом при движении задним ходом, включающая: датчик угла сцепки, определяющий угол между продольными осями автомобиля и прицепа; датчик среднего угла поворота управляемых колес автомобиля; модуль ввода заданного значения регулируемой величины; контроллер, содержащий в своем составе идентификатор для получения оценок кинематических параметров объекта управления «автомобиль-прицеп» и внешнего возмущения по данным с датчиков информации; регулятор, который на основе доставляемых идентификатором текущих оценок кинематических параметров и внешнего возмущения, информации с датчиков формирует закон отклонения управляемых колес автомобиля, а также ограничивает задаваемое значение регулируемой величины для исключения складывания сцепки «автомобиль-прицеп»; систему усилителя руля, автоматически отклоняющую управляемые колеса автомобиля по сигналам регулятора; человеко-машинный интерфейс для переключения режимов работы системы и выдачи сигнальной информации водителю, отличающаяся тем, что в систему включен датчик скорости автомобиля, в модуле ввода заданного значения регулируемой величины и регуляторе в качестве регулируемой величины используется относительная угловая скорость прицепа - угловая скорость прицепа, отнесенная к скорости автомобиля; человеко-машинный интерфейс дополнительно используется для ввода исходной информации.
2. Способ использования адаптивной системы помощи водителю легкового автомобиля с прицепом при движении задним ходом по п.1, отличающийся тем, что:
перед целевым применением системы помощи определяют длину прицепа с точностью, допускающей 50% погрешность, и вводят ее в систему; остальные кинематические параметры: колесная база автомобиля и смещение сцепки - считаются известными и заранее введенными в систему;
во время целевого использования системы помощи на основе условий маневрирования, наличия сигнала о возможности складывания прицепа, выдаваемого человеко-машинным интерфейсом, и достижения текущим углом сцепки значений, близких к ±90°, вводят заданное значение относительной угловой скорости прицепа, которое автоматически ограничивается на основе максимальной реализуемой кривизны пути автомобиля;
сигнал о возможности складывания прицепа формируют на основе достижения средним углом управляемых колес значений, близких к своему конструкционному ограничению.
| СИСТЕМА ПОМОЩИ ПРИ ДВИЖЕНИИ ЗАДНИМ ХОДОМ С ПРИЦЕПОМ | 2015 |
|
RU2608786C2 |
| Мобильная система помощи водителю автомобиля с прицепом при маневрировании задним ходом | 2018 |
|
RU2694645C1 |
| Адаптивная система помощи при движении задним ходом автомобиля с прицепом | 2018 |
|
RU2702199C2 |
| US 9434414 B2, 06.09.2016 | |||
| US 10730553 B2, 04.08.2020 | |||
| US 9540043 B2, 10.01.2017. | |||

