Изобретения относятся к области приборостроения и могут найти применение в системах ориентации и навигации летательных аппаратов (ЛА), предназначенных для вычисления и отображения основных пилотажно-навигационных параметров ЛА.
Известно резервное устройство индикации воздушного судна [1], предназначенное для отображения пилотажной информации о полете ЛА (пространственное положение, скорость, высота) и содержащее блок источников информации, блок обработки информации и средство индикации.
Недостатком данного устройства, как и способа выставки его реализующего, является отсутствие в нем магнитометра, способного автономно выдавать информацию о магнитном курсе ЛА.
Известна также система [2], включающая в себя два объединенных прибора, предназначенная для определения пространственного положения ЛА и высотно-скоростных параметров полета, необходимых для пилотирования ЛА. Отображение вычисленной информации происходит на жидкокристаллическом (ЖК) дисплее каждого прибора.
Способ выставки этой системы, содержащей два объединенных прибора и средства для сообщения между ними, причем каждый прибор содержит автономный инерциальный измерительный блок с датчиками первичной информации, заключается во взаимной выставке каждого инерциального измерительного блока на основе положения каждого прибора и измерений, произведенных каждым прибором за один и тот же период времени.
Недостатком этой системы является отсутствие магнитометра, и как результат, невозможность выставки по курсу. Недостатком способа выставки данной системы является невозможность точной оценки дрейфа датчиков угловой скорости курсового канала во время начальной выставки на качающемся основании при одновременном движении ЛА по курсу, крену и тангажу.
Заявленное изобретение направлено на повышение точности вычисления собственного дрейфа датчиков угловых скоростей и более точное определение значений параметров пространственного положения ЛА.
Поставленная задача решается за счет того, что в резервную систему ориентации летательного аппарата (ЛА), предназначенную для определения и индикации пространственного положения, высотно-скоростных параметров, включающую в себя два интегрированных объединенных электронных резервных прибора (ИРП), каждый из которых содержит устройство отображения информации, блок датчиков первичной информации (ДЛИ) с входящими в него блоком датчиков угловых скоростей (ДУС) и блоком акселерометров и блок датчиков давления, подключенных к вычислителю, интерфейсный модуль, по которому информация с акселерометров одного прибора передается на вычислитель другого и наоборот, а информация с датчиков угловых скоростей (без учета смещения нулей и погрешностей, обусловленных скоростью вращения Земли) одного прибора передается в вычислитель другого и наоборот, согласно изобретению, в состав каждого ИРП вводится трехкомпонентный жесткозакрепленный магнитометр, а также дополнительные средства сообщения между магнитометрами обоих приборов, полученная информация с которых используется для вычисления углов ориентации и последующей индикации в устройстве отображения информации.
Достигаемым техническим результатом настоящего изобретения является повышение точности вычисления собственного дрейфа датчиков угловых скоростей и наиболее точное определение значений параметров пространственного положения ЛА.
В способе выставки системы ориентации ЛА, в котором для начальной выставки углов крена, тангажа и курса и для оценки дрейфа датчиков угловых скоростей по выходным линиям ДУС реализован адаптивный фильтр Винера, параметры которого изменяют по разности угловых скоростей соответствующих датчиков разных приборов, далее информацию пересчитывают в земную систему координат и используют в адаптивном фильтре Калмана для вычисления смещения нуля и угловой скорости, обусловленную вращением Земли, измеряемым каждым ДУС по соответствующим осям (оси X, Y, Z) в каждом приборе, также для вычисления погрешности ДУС используют информацию с акселерометров в каждом блоке, обрабатываемую адаптивным фильтром Винера, параметры которых адаптируют по разности значений ускорений разных приборов, согласно изобретению, в каждом приборе дополнительно используют информацию с трехкомпонентных жесткозакрепленных магнитометров (ТЖМ), измеряющих напряженности магнитного поля Земли, которые пересчитывают в земную систему координат, обрабатывают в каждом приборе адаптивным фильтром Винера, параметры которого адаптируют по разности напряженности магнитного поля с двух приборов и затем используют в адаптивном фильтре Калмана для оценки смещения нулевого сигнала датчиков угловых скоростей.
Существенным отличием изобретения является введение в состав каждого прибора ТЖМ, дополнительных средств сообщения между магнитометрами, а также дополнительных средств для осуществления более точной выставки на основе знания составляющих погрешности магнитного поля Земли, измеренных ТЖМ каждого прибора за один и тот же период времени.
Другим существенным отличием является способ выставки обоих ИРП, установленных на борту ЛА в соответствии с [2], с дополнительным привлечением информации с ТЖМ каждого ИРП.
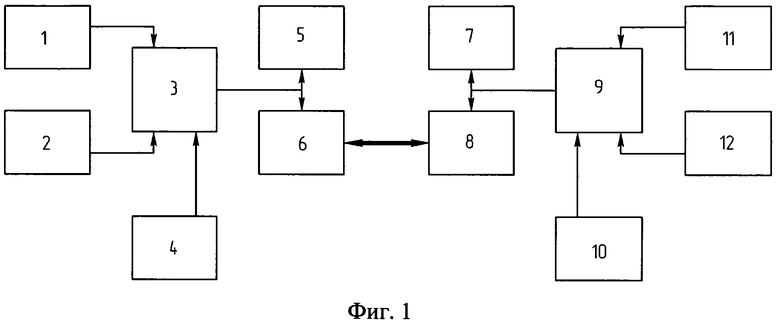
На фиг.1 представлена блок-схема устройства.
Система содержит блоки 1, 11 датчиков давления, блоки 2, 12 ДЛИ инерциальные измерительные, вычислители 3, 9, ТЖМ 4, 10, устройства 5, 7 отображения информации, интерфейсные модули 6, 8.
Выходы блока 1 датчиков давления, блока 2 ДЛИ, в состав которого входят акселерометры и датчики угловой скорости, ТЖМ 4 соединены со входами вычислителя 3, выход которого подключен к устройству 5 отображения информации и модулю 6 интерфейсному, соединенному с модулем 8 интерфейсным второго ИРП для обмена пилотажной информацией.
Выходы блока 11 датчиков давления, блока 12 ДНИ, в состав которого входят акселерометры и датчики угловой скорости, ТЖМ 10 соединены со входами вычислителя 9, выход которого подключен к устройству 7 отображения информации и модулю 8 интерфейсному, соединенному с модулем 6 интерфейсным первого ИРП для обмена пилотажной информацией.
Согласно изобретению, в полученной системе, содержащей два ИРП, блоки ДНИ взаимно выставляются на основе относительного положения каждого прибора и измерительной информации, полученных каждым прибором за один и тот же период времени.
На фиг.2 показан пример устройства для реализации такой выставки и соответствующий способ. Чтобы не загромождать фиг.2, показаны только средства для выставки второго ИРП.
Второй ИРП, также как и первый ИРП, содержит устройства 26, 28 для преобразования измеренных значений, полученных с инерциальных датчиков и ТЖМ, чтобы привести их из связанной системы координат в земную систему координат, также, как и устройства 13, 16, входящие в состав первого ИРП. Устройство 18 предназначено для вычисления разности между значениями Ω1, измеренными первым ИРП, и значениями оцененной погрешности 
Адаптивный фильтр 19 преобразует информацию Ωсвяз2, измеренную вторым ИРП и откорректированную на величину дрейфа dΩ2, чтобы привести ее к значениям углов ориентации первого ИРП. В качестве оптимального адаптивного фильтра используется фильтр Винера. Рассчитанные значения используются как входящая информация для устройства 28 вычисления значений углов ориентации
Кроме того, второй ИРП содержит устройство для преобразования значений ускорения, измеряемых акселерометрами А2 второго ИРП, с целью приведения указанных значений к значениям углов ориентации первого ИРП. Устройство 20 предназначено для вычисления разности значений ускорения, измеряемых акселерометрами A1 первого ИРП, и преобразованных в фильтре Винера 21 значений оцененной погрешности 

Информация о значениях, составляющих напряженности магнитного поля Земли Н2, поступающих с ТЖМ 27 в адаптивный фильтр Винера 25, параметры которого подстраиваются под значения оцененной погрешности 
Информация с фильтров Винера о значениях оцененных погрешностей угловых скоростей 


Выставка первого ИРП и второго ИРП производится в один и тот же период времени, когда приборы движутся синхронно на подвижном основании.
В каждом ИРП имеется устройство для синхронизации измерений в обоих приборах.
Фильтры обоих ИРП и ИРП работают параллельно и одновременно с целью обеспечения быстрого схождения во время выставки.
Каждое измерение Ω1 синхронизируется с А1 и Н1, а каждое измерение Ω2 с А2 и Н2.
Обработка данных с ДНИ первого ИРП происходит аналогично.
В результате работы обоих ИРП на выходе получаются согласованные значения углов крена, тангажа и гиромагнитного курса.
Реализация данного способа выставки позволит повысить точность определения значений параметров полета летательного аппарата резервной системой ориентации.
Источники информации
1. Патент РФ №2350907 G01C 23/00, 2009 г.
2. Патент США №2010/0286913, 2010 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РАБОТОСПОСОБНОСТИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ПОСЛЕ СБОЯ АППАРАТУРЫ | 2020 |
|
RU2754128C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2555496C1 |
| Способы формирования данных об ориентации объекта и навигационный комплекс летательного аппарата для их реализации | 2020 |
|
RU2745083C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ И КУРСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2427799C1 |
| Способ определения углов пространственной ориентации | 2016 |
|
RU2713078C1 |
| Малогабаритная адаптивная курсовертикаль | 2016 |
|
RU2714144C2 |
| Комплексный способ навигации летательных аппаратов | 2016 |
|
RU2646957C1 |
| Бесплатформенная инерциальная курсовертикаль | 2016 |
|
RU2643201C2 |
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
Изобретения относятся к области приборостроения и могут найти применение в системах ориентации и навигации летательных аппаратов (ЛА), предназначенных для вычисления и отображения основных пилотажно-навигационных параметров ЛА. Технический результат - повышение точности вычисления собственного дрейфа датчиков угловых скоростей и определения значений параметров пространственного положения ЛА. Для этого в состав каждого прибора трехкомпонентного жесткозакрепленного магнитометра (ТЖМ) введены дополнительные интерфейсные средства между магнитометрами, а также дополнительные средства для осуществления более точной выставки резервной системы ориентации на основе измерения составляющих погрешности магнитного поля Земли, измеренных ТЖМ каждого прибора за один и тот же период времени. 2 н.п. ф-лы, 2 ил.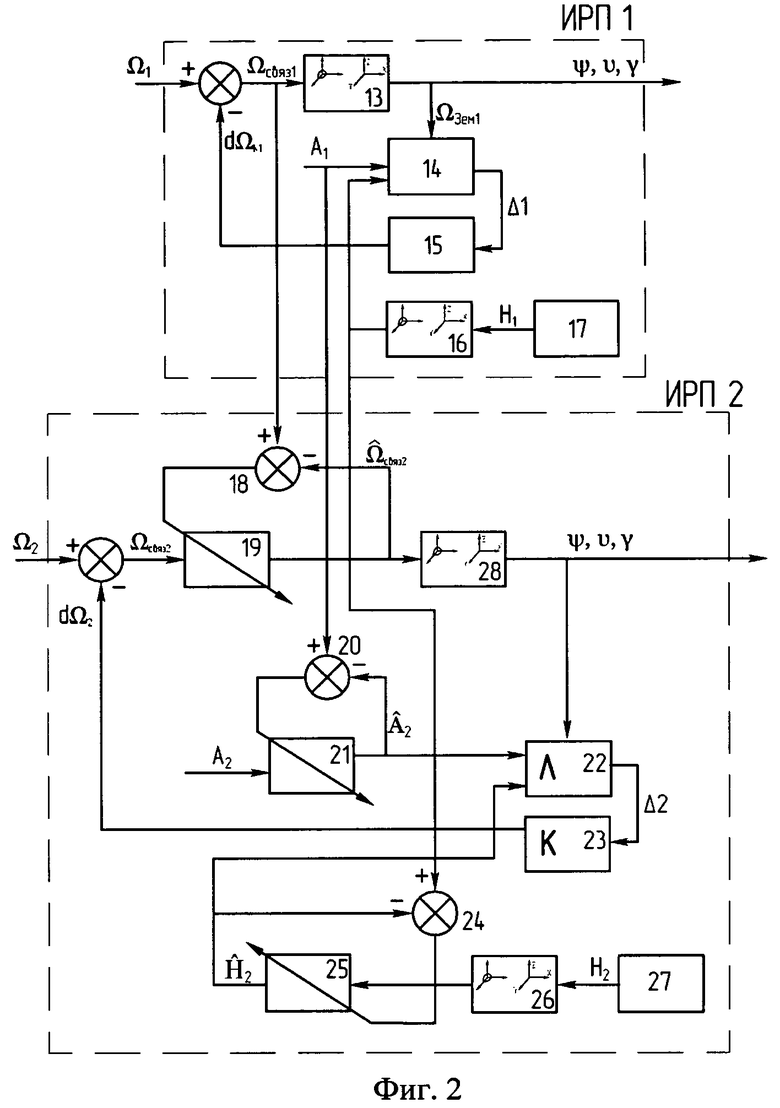
1. Резервная система ориентации летательного аппарата (ЛА), предназначенная для определения и индикации пространственного положения, высотно-скоростных параметров, включающая в себя два интегрированных объединенных электронных резервных прибора, каждый из которых содержит устройство отображения информации, блок датчиков угловых скоростей (ДУС), блок акселерометров и блок датчиков давления, подключенных к вычислителю, интерфейсный модуль, для передачи информации с акселерометров одного прибора на вычислитель другого и наоборот, а также информации с датчиков угловых скоростей (без учета смещения нулей и погрешностей, обусловленных скоростью вращения Земли) одного прибора в вычислитель другого и наоборот, отличающаяся тем, что в состав каждого интегрированного объединенного электронного резервного прибора введен трехкомпонентный жесткозакрепленный магнитометр, для передачи информации, преобразованной в земную систему координат, из одного прибора в вычислитель другого и наоборот, где полученная информация используется в вычислении углов ориентации и затем индикации в устройстве отображения информации.
2. Способ выставки системы ориентации ЛА, в котором для начальной выставки углов крена, тангажа и курса и для оценки дрейфа датчиков угловых скоростей по выходным линиям ДУС реализован адаптивный фильтр Винера, параметры которого изменяют по разности угловых скоростей соответствующих датчиков разных приборов, далее информацию пересчитывают в земную систему координат и используют в адаптивном фильтре Калмана для вычисления смещения нуля и угловой скорости, обусловленную вращением Земли, измеряемым каждым ДУСом по соответствующим осям (оси X, Y, Z) в каждом приборе, также для вычисления погрешности ДУСов используют информацию с акселерометров в каждом блоке, обрабатываемую адаптивным фильтром Винера, параметры которых адаптируют по разности значений ускорений разных приборов, отличающийся тем, что в каждом приборе дополнительно используют информацию с трехкомпонентных жесткозакрепленных магнитометров (напряженности магнитного поля Земли), которые пересчитывают в земную систему координат, обрабатывают в каждом приборе адаптивным фильтром Винера, параметры которого адаптируют по разности напряженности магнитного поля с двух приборов и затем используют в адаптивном фильтре Калмана для оценки смещения нулевого сигнала датчиков угловых скоростей.
| US 20100286913 A1, 11.11.2010 | |||
| СПОСОБ ФОРМИРОВАНИЯ РЕГИОНАЛЬНЫХ БЕСПРОВОДНЫХ СЕТЕЙ ПЕРЕДАЧИ ИНФОРМАЦИИ И ТЕЛЕКОММУТАЦИОННАЯ ВОЗДУШНАЯ ПЛАТФОРМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2287910C1 |
| Шарнирная стойка для железнодорожной платформы | 1937 |
|
SU52296A1 |
| ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2011 |
|
RU2468395C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ СИСТЕМА ОРИЕНТАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2008 |
|
RU2382988C1 |
| БАБИЧ О.А | |||
| Обработка информации в навигационных комплексах | |||
| - М.: Машиностроение, 1991, с.6-16, 391-507 | |||

