Область техники
[0001] Настоящее изобретение относится к способу управления указателем поворота и устройству для управления указателем поворота.
Уровень техники
[0002] Известно устройство управления поворотниками, которое выполнено с возможностью: вычисления расстояния перемещения транспортного средства в поперечном направлении с момента времени, когда поворотник, предусмотренный в транспортном средстве, загорелся посредством выполнения операции органа управления для поворотника; и выключения поворотника, когда расстояние перемещения в поперечном направлении больше или равно пороговому значению, и поворотник, таким образом, автоматически отключается (Патентный Документ 1: JP2010–280272A).
Документ предшествующего уровня техники
Патентный Документ
[0003] Патентный Документ 1 JP2010–280272A
Сущность изобретения
Проблемы, решаемые изобретением
[0004] В предшествующем уровне техники даже при смене полосы движения с помощью автоматизированного или автономного управления вождением для выполнения управления движением транспортного средства в автоматизированном или автономном режиме управление поворотником является таким же, как и в случае смены полосы движения с помощью рулевого управления, выполняемого водителем. Следовательно, при смене полосы движения с помощью автоматизированного или автономного управления вождением поворотник может продолжать мигать, поскольку после того, как поворотник загорелся, сделано определение, что смена полосы движения не может быть выполнена. Это вызывает проблему, заключающуюся в том, что водитель вынужден выключать поворотник, и нагрузка на водителя возрастает.
[0005] Проблема, решаемая с помощью настоящего изобретения, состоит в том, чтобы уменьшить нагрузку на водителя транспортного средства, которое может менять полосу движения в автоматизированном или автономном режиме.
Средства для решения проблем
[0006] Настоящее изобретение решает вышеупомянутую проблему посредством: указателя поворота, выполненного с возможностью начинать мигать в ответ на операцию водителя рассматриваемого транспортного средства и автоматически выключаться по истечении первого времени мигания, когда рассматриваемое транспортное средство меняет полосу движения в автоматизированном или автономном режиме вследствие операции водителя, продления первого времени мигания до второго времени мигания, являющегося более длительным, чем первое время мигания; и управления указателем поворота для автоматического выключения.
Эффект изобретения
[0007] Согласно настоящему изобретению можно уменьшить нагрузку на водителя транспортного средства, которое может менять полосу движения в автоматизированном или автономном режиме.
Краткое описание чертежей
[0008]
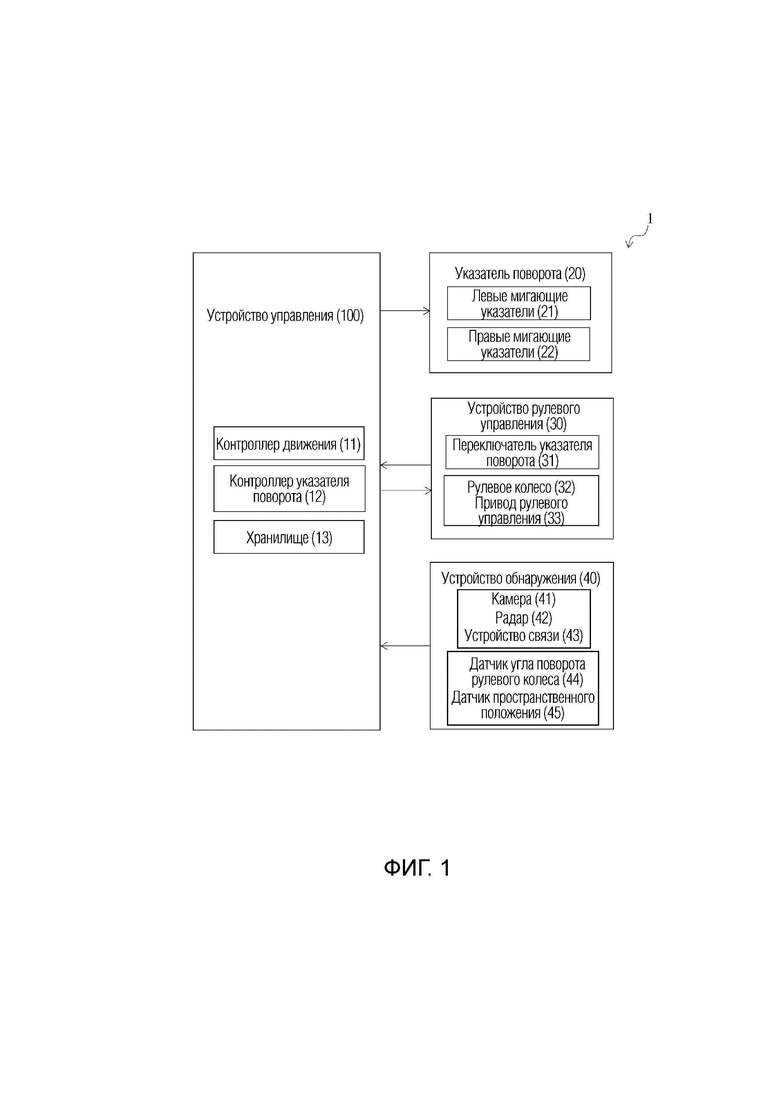
ФИГ. 1 является схемой конфигурации системы управления, включающей в себя устройство управления для указателя поворота, согласно одному или нескольким вариантам осуществления настоящего изобретения.
ФИГ. 2 является блок–схемой последовательности операций процедуры управления, выполняемой устройством управления для указателя поворота, согласно одному или нескольким вариантам осуществления настоящего изобретения.
Вариант(ы) осуществления настоящего изобретения
[0009] Далее один или несколько вариантов осуществления настоящего изобретения будут описаны со ссылкой на чертежи. В одном или нескольких вариантах осуществления настоящего изобретения будет описан примерный случай, в котором устройство 100 управления в соответствии с настоящим изобретением применяется к системе 1 управления, которой оборудовано транспортное средство. Система 1 управления в соответствии с одним или несколькими вариантами осуществления настоящего изобретения представляет собой систему, которая управляет временем мигания указателя поворота и работает, чтобы надлежащим образом изменять время мигания на основе состояния движения рассматриваемого транспортного средства и информации о трафике вокруг рассматриваемого транспортного средства.
[0010] ФИГ. 1 является блочной схемой конфигурации системы 1 управления, включающей в себя устройство 100 управления для указателя поворота, согласно одному или нескольким вариантам осуществления настоящего изобретения. Как проиллюстрировано на ФИГ. 1, система 1 управления в соответствии с одним или несколькими вариантами осуществления настоящего изобретения включает в себя указатель 20 поворота (направления), устройство 30 рулевого управления, устройство 40 обнаружения и устройство 100 управления. Эти компоненты соединены друг с другом через сеть контроллеров (CAN) или другую встроенную LAN и могут осуществлять взаимный обмен информацией.
[0011] В одном или нескольких вариантах осуществления настоящего изобретения будет описан примерный случай, в котором система 1 управления применяется к транспортному средству. Транспортное средство в соответствии с одним или несколькими вариантами осуществления настоящего изобретения может быть транспортным средством с людьми, которое может перевозить одного или нескольких пассажиров. Предполагается, что сиденье водителя транспортного средства и рулевое колесо 32, описанные ниже, предусмотрены с правой стороны от центра транспортного средства. Также предполагается, что транспортное средство в соответствии с одним или несколькими вариантами осуществления настоящего изобретения движется по части дороги с левой стороны от ее центра (левостороннее движение).
[0012] Указатель 20 поворота в соответствии с одним или несколькими вариантами осуществления настоящего изобретения обеспечен в заранее определенном положении транспортного средства. Указатель 20 поворота состоит из одного или нескольких левых мигающих указателей 21 (левых поворотников) и одного или нескольких правых мигающих указателей 22 (правых поворотников). Левые мигающие указатели 21 могут быть установлены вблизи левого переднего и заднего углов рассматриваемого транспортного средства и на левой стороне рассматриваемого транспортного средства. Правые мигающие указатели 22 могут быть установлены вблизи правого переднего и заднего углов рассматриваемого транспортного средства и на правой стороне рассматриваемого транспортного средства.
[0013] Эти мигающие указатели указателя 20 поворота имеют внутри себя лампы для мигания. Когда водитель рассматриваемого транспортного средства приводит в действие переключатель 31 указателя поворота, который будет описан ниже, мигающие указатели указателя 20 поворота мигают оранжевым цветом. Таким образом, указатель 20 поворота представляет собой устройство для указания в окружающую среду направления, когда рассматриваемое транспортное средство поворачивает вправо или влево, или меняет полосу движения. Предпочтительно устанавливать мигающие указатели указателя 20 поворота в положениях, которые позволяют третьим лицам, находящимся вокруг рассматриваемого транспортного средства, визуально подтверждать мигание мигающих указателей. Например, что касается боковых сторон рассматриваемого транспортного средства, один из левых мигающих указателей 21 предусмотрен в положении левого бокового зеркала рассматриваемого транспортного средства, в то время как один из правых мигающих указателей 22 предусмотрен в положении правого бокового зеркала рассматриваемого транспортного средства.
[0014] Указатель 20 поворота принимает сигнал начала мигания и сигнал времени мигания от устройства 100 управления, которое будет описано ниже. Сигнал начала мигания является сигналом, который позволяет указателю 20 поворота начать мигать, и генерируется, когда водитель приводит в действие переключатель 31 указателя поворота, который будет описан ниже. Сигнал времени мигания включает в себя информацию о времени мигания указателя 20 поворота. Время мигания указателя 20 поворота устанавливается устройством 100 управления в соответствии с управлением движением рассматриваемого транспортного средства и/или ситуацией с трафиком вокруг рассматриваемого транспортного средства. Работа указателя 20 поворота будет описана ниже.
[0015] Указатель 20 поворота в соответствии с одним или несколькими вариантами осуществления настоящего изобретения имеет функцию одного касания. Указатель 20 поворота по–разному мигает в соответствии с тем, включена ли или выключена функция одного касания. Функция одного касания предназначена для уменьшения нагрузки на водителя, который работает с указателем 20 поворота. Водитель включает или выключает функцию одного касания указателя 20 поворота, выполняя различные операции с переключателем 31 указателя поворота, которые будут описаны ниже. Операция переключателя 31 указателя поворота водителем выводится в качестве операционного сигнала на устройство 100 управления, который устанавливает функцию одного касания указателя 20 поворота во включенное или выключенное состояние. Функция одного касания будет описана ниже.
[0016] Устройство 30 рулевого управления включает в себя переключатель 31 указателя поворота, рулевое колесо 32 и привод 33 рулевого управления. Устройство 30 рулевого управления выполняет управление поворотом рассматриваемого транспортного средства на основе входного сигнала, генерируемого операцией рулевого колеса 32. Сигнал управления вводится в устройство 30 рулевого управления, как будет описано ниже.
[0017] Переключатель 31 указателя поворота является переключателем, который приводится в действие водителем для мигания или выключения указателя 20 поворота, и он установлен на правой стороне рулевой колонки, если смотреть со стороны водителя. Примеры формы переключателя 31 указателя поворота включают в себя форму рычага. В одном или нескольких вариантах осуществления настоящего изобретения переключатель указателя поворота будет описан как имеющий форму рычага. Переключатель 31 указателя поворота является переключателем, который может перемещаться между центральным положением, верхним положением, расположенным выше центрального положения, если смотреть со стороны водителя, и нижним положением, расположенным ниже центрального положения, если смотреть со стороны водителя. Водитель может отклонить переключатель 31 указателя поворота из центрального положения в верхнее положение или в нижнее положение. Отклоненный переключатель 31 указателя поворота удерживает свое положение в верхнем положении или в нижнем положении. Эта выполняемая водителем операция далее будет именоваться «операцией удержания» переключателя 31 указателя поворота. Водитель также может вернуть переключатель 31 указателя поворота, который был отклонен в верхнее положение или нижнее положение, в центральное положение. Форма переключателя 31 указателя поворота особым образом не ограничена, и он может также иметь форму кнопки или форму переключателя.
[0018] Переключатель 31 указателя поворота включает в себя упругий материал, например, пружину. Когда водитель перемещает переключатель 31 указателя поворота вверх или вниз в пределах заданного диапазона без отклонения переключателя 31 указателя поворота из центрального положения в верхнее положение или нижнее положение, переключатель 31 указателя поворота автоматически возвращается в центральное положение посредством упругого материала. Эта выполняемая водителем операция далее будет именоваться «операцией одного касания» переключателя 31 указателя поворота.
[0019] Когда водитель выполняет операцию удержания или операцию одного касания для переключателя 31 указателя поворота, переключатель 31 указателя поворота выводит операцию водителя в качестве операционного сигнала на устройство 100 управления. Операционный сигнал включает в себя информацию об «операции удержания» для переключателя 31 указателя поворота, выполняемой водителем, и информацию об «операции одного касания» для переключателя 31 указателя поворота, выполняемой водителем. Водитель может переводить переключатель 31 указателя поворота вверх из центрального положения, тем самым управляя миганием и выключением левых мигающих указателей 21. С другой стороны, водитель может переводить переключатель 31 указателя поворота вниз из центрального положения, тем самым управляя миганием и выключением правых мигающих указателей 22.
[0020] Рулевое колесо 32 является круглым компонентом для управления механизмом рулевого управления, чтобы регулировать направление движения рассматриваемого транспортного средства при его вращении. Водитель захватывает рулевое колесо 32 обеими руками и поворачивает его, чтобы отрегулировать направление движения.
[0021] Привод 33 рулевого управления в себя электромотор и другие необходимые компоненты, прикрепленные к валу колонки рулевого колеса 32. Привод 33 рулевого управления приводит в действие транспортное средство на основе входного сигнала, генерируемого водителем, управляющим рулевым колесом 32, или сигнала управления, вводимого от устройства 100 управления, которое будет описано ниже.
[0022] Устройство 40 обнаружения включает в себя устройство для обнаружения других транспортных средств и устройство для получения информации о рассматриваемом транспортном средстве. Первое устройство состоит из камеры 41, радара 42 и устройства 43 связи. Последнее устройство состоит из датчика 44 угла поворота рулевого колеса и датчика 45 пространственного положения. В одном или нескольких вариантах осуществления настоящего изобретения эти компоненты устройства 40 обнаружения установлены в соответствующих заранее определенных положениях рассматриваемого транспортного средства, но эти положения установки конкретно не ограничены, и компоненты могут быть установлены в свободно выбранных положениях.
[0023] Камера 41 устанавливается в заранее определенном положении рассматриваемого транспортного средства для захвата изображений вокруг транспортного средства. Камера 41 выводит захваченные изображения вокруг рассматриваемого транспортного средства в устройство 100 управления.
[0024] Радар 42 устанавливается в заранее определенном положении рассматриваемого транспортного средства для обнаружения других транспортных средств, имеющихся вокруг рассматриваемого транспортного средства. Радар 42 выводит результаты обнаружения препятствий, обнаруженных впереди, позади или сбоку рассматриваемого транспортного средства в устройство 100 управления.
[0025] Устройство 43 связи представляет собой устройство, которое позволяет осуществлять связь с другими транспортными средствами, имеющимися вокруг рассматриваемого транспортного средства, то есть так называемую связь между транспортными средствами, и устанавливается в заранее определенном положении рассматриваемого транспортного средства. Устройство 43 связи выводит результаты связи с другими транспортными средствами в устройство 100 управления.
[0026] Датчик 44 угла поворота рулевого колеса обнаруживает инициирующее событие, с которого начинается управление движением рассматриваемого транспортного средства вправо или влево. Датчик 44 угла поворота рулевого колеса может обнаружить инициирующее событие посредством обнаружения момента движения рулевого колеса 32 устройства 30 рулевого управления. Кроме того, датчик 44 угла поворота рулевого колеса может обнаруживать угол поворота рулевого колеса 32, тем самым обнаруживая, является ли направлением вращения рулевого колеса 32 направление по часовой стрелке или против часовой стрелки. Датчик 44 угла поворота рулевого колеса выводит результаты обнаружения на устройство 100 управления.
[0027] Датчик 45 пространственного положения обнаруживает пространственное положение рассматриваемого транспортного средства на основе информации, касающейся конструкции кузова транспортного средства, такой как вес, центр тяжести и колесная база рассматриваемого транспортного средства, и информации, касающейся пространственного положения транспортного средства, такой как угол тангажа, угол рыскания и величина хода подвески. Датчик 45 пространственного положения выводит результаты обнаружения на устройство 100 управления.
[0028] Устройство 100 управления в соответствии с одним или несколькими вариантами осуществления настоящего изобретения будет описан далее. Устройство 100 управления в соответствии с одним или несколькими вариантами осуществления настоящего изобретения включает в себя контроллер 11 движения, контроллер 12 указателя поворота и хранилище 13. Контроллер 11 движения и контроллер 12 указателя поворота могут осуществлять взаимный обмен информацией между блоками. Контроллер 12 указателя поворота может управлять указателем 20 поворота, обращаясь к результатам и подобному, полученным контроллером 11 движения, который будет описан ниже.
[0029] Контроллер 11 движения включает в себя ECU, который управляет различными информационными элементами транспортного средства и управляет работой транспортного средства. Контроллер 11 движения в соответствии с одним или несколькими вариантами осуществления настоящего изобретения получает информацию о существовании других транспортных средств и информацию о рассматриваемом транспортном средстве, которые обнаруживаются устройством 40 обнаружения. Информация о существовании других транспортных средств включает в себя захваченные изображения вокруг рассматриваемого транспортного средства с камеры 41, информацию о препятствиях вокруг рассматриваемого транспортного средства с радара 42 и результаты связи с другими транспортными средствами с устройства 43 связи. Информация о рассматриваемом транспортном средстве включает в себя угол поворота рулевого колеса с датчика 44 угла поворота рулевого колеса и результат обнаружения пространственного положения рассматриваемого транспортного средства с датчика 45 пространственного положения.
[0030] Контроллер 11 движения управляет движением транспортного средства. Контроллер 11 движения может переключаться между движением с помощью рулевого управления, выполняемого водителем, и движением с помощью автоматизированного или автономного управления вождением. Под движением согласно рулевому управлению, выполняемому водителем, понимается движение, которое водитель совершает, управляя направлением движения, скоростью движения и т. д. Например, водитель нажимает на акселератор с некоторой силой и поворачивает рулевое колесо 32 по часовой стрелке, тем самым управляя рассматриваемым транспортным средством для движения вперед и вправо.
[0031] С другой стороны, движение с помощью автоматизированного или автономного управления вождением относится к движению, которое контроллер 11 движения выполняет автоматизировано или автономно, управляя направлением движения, скоростью движения и т. д., даже без управления акселератором и рулевым колесом 32 со стороны водителя. Контроллер 11 движения в соответствии с одним или несколькими вариантами осуществления настоящего изобретения имеет функцию автоматизированной или автономной смены полосы движения в качестве одной из функций, ответственных за движение посредством автоматизированного или автономного управления вождением.
[0032] Функция автоматизированной или автономной смены полосы движения относится к функции смены полосы движения автоматизированным или автономным образом с полосы движения, по которой движется рассматриваемое транспортное средство, на другую полосу движения. Контроллер 11 движения может выводить сигнал управления на устройство 30 рулевого управления, чтобы приводить в действие рулевое колесо 32 вместо рулевого управления со стороны водителя. Управление сменой полосы движения, выполняемое контроллером 11 движения, не ограничивается управлением вращением рулевого колеса 32. Например, контроллер 11 движения может просто управлять углом поворота колес для выполнения смены полосы движения. Дополнительно или в качестве альтернативы, контроллер 11 движения может выполнять управление сменой полосы движения, используя разность между тормозными усилиями справа и слева.
[0033] Функция автоматизированной или автономной смены полосы движения может переключаться между действующим и недействующим состоянием контроллером 11 движения или водителем. Например, водитель может установить функцию автоматизированной или автономной смены полосы движения с экрана настройки, отображаемого на внутреннем дисплее. Дополнительно или в качестве альтернативы, контроллер 11 движения может устанавливать функцию автоматизированной или автономной смены полосы движения на основе результатов обнаружения устройства 40 обнаружения. Способы установки функции автоматизированной или автономной смены полосы движения не ограничены конкретным образом.
[0034] Когда функция автоматизированной или автономной смены полосы движения является действующей, контроллер 11 движения запускает процесс смены полосы движения посредством автоматизированного или автономного управления вождением в ответ на приведение в действие переключателя 31 указателя поворота водителем. В частности, контроллер 11 движения обнаруживает информацию об «операции одного касания» водителем переключателя 31 указателя поворота по операционному сигналу, который выводится из переключателя 31 указателя поворота. Затем, по причине этой «операции одного касания», контроллер 11 движения запускает процесс смены полосы движения с помощью автоматизированного или автономного управления вождением. В одном или нескольких вариантах осуществления настоящего изобретения, водитель выполняет «операцию одного касания» переключателя 31 указателя поворота, чтобы запустить мигание указателя 20 поворота и запустить процесс смены полосы движения с помощью автоматизированного или автономного управления вождением.
[0035] Сначала контроллер 11 движения определяет, является ли смена полосы движения с помощью автоматизированного или автономного управления вождение возможной, на основе результата обнаружения каждого компонента, который вводится от устройства 40 обнаружения. В одном или нескольких вариантах осуществления настоящего изобретения, контроллер 11 движения определяет, присутствует ли препятствие в соседней полосе движения относительно полосы движения, в которой рассматриваемое транспортное средство движется. Соседние полосы движения включают правую полосу движения и левую полосу движения относительно полосы движения, в которой движется рассматриваемое транспортное средство. Препятствия включают в себя другие транспортные средства, двухколесные транспортные средства (такие как мотоциклы и велосипеды), дорожные конструкции, автостоянки, дорожные знаки, сооружения и другие объекты.
[0036] Например, контроллер 11 движения выполняет обработку изображений над изображением, захваченным камерой 41, и определяет, присутствует ли другое транспортное средство в соседней полосе движения и следует ли выполнить смену полосы движения. Дополнительно или в качестве альтернативы, контроллер 11 движения определяет, присутствует ли другое транспортное средство, например, исходя из результата обнаружения радара 42, и определяет, следует ли выполнить смену полосы движения. Дополнительно или в качестве альтернативы, контроллер 11 движения может определить наличие другого транспортного средства, обратившись к записи или подобному, которая сделана при связи с другими транспортными средствами, из результатов связи устройства 43 связи. В варианте осуществления контроллер 11 движения может обнаруживать наличие соответствующих других транспортных средств по изображению, захваченному камерой 41, по результатам обнаружения радара 42 и по результатам связи устройства 43 связи.
[0037] При определении, что выполнение смены полосы движения является возможным, контроллер 11 движения управляет рассматриваемым транспортным средством для смены полосы движения в автоматизированном или автономном режиме. Например, контроллер 11 движения выполняет программу для смены полосы движения, которая предварительно сохранена в хранилище 13, для смены полосы движения с полосы движения, в которой движение осуществляется в настоящее время, на правую полосу движения или на левую полосу движения. Устройство автоматизированного или автономного управления вождением, известное на момент подачи данной заявки, может быть надлежащим образом использовано для контроллера 11 движения.
[0038] Контроллер 11 движения также обнаруживает направление рулевого управления водителем на основе результата обнаружения каждого компонента, который вводится от устройства 40 обнаружения.
[0039] Например, контроллер 11 движения обнаруживает инициирующее событие, с которого начинается управление движением рассматриваемого транспортного средства, по результату обнаружения датчика 44 угла поворота рулевого колеса и обнаруживает направление рулевого управления водителем по углу поворота рулевого колеса. Когда угол поворота рулевого колеса является углом, который указывает вращение рулевого колеса 32 по часовой стрелке, контроллер 11 движения обнаруживает, что направлением рулевого управления водителем является направление вправо. С другой стороны, когда угол поворота рулевого колеса является углом, который указывает вращение рулевого колеса 32 против часовой стрелки, контроллер 11 движения обнаруживает, что направлением рулевого управления водителем является направление влево.
[0040] Способы обнаружения направления рулевого управления водителем не ограничиваются вышеописанным способом. Например, направление рулевого управления водителем может быть обнаружено по результату обнаружения датчика 45 пространственного положения. В варианте осуществления, контроллер 11 движения может обнаруживать соответствующие направления рулевого управления водителем по результату обнаружения датчика 44 угла поворота рулевого колеса и по результату обнаружения датчика 45 пространственного положения.
[0041] Когда рассматриваемое транспортное средство меняет полосу движения с помощью автоматизированного или автономного управления вождением, контроллер 11 движения определяет, совпадает ли направление рулевого управления водителем с направлением смены полосы движения с помощью автоматизированного или автономного управления вождением. Контроллер 11 движения сравнивает обнаруженное направление рулевого управления водителем с направлением смены полосы движения, которое предварительно планируется с использованием функции автоматизированной или автономной смены полосы движения. Это позволяет контроллеру 11 движения определить, совпадает ли направление рулевого управления водителем с направлением смены полосы движения с помощью автоматизированного или автономного управления вождением.
[0042] Контроллер 12 указателя поворота и хранилище 13 в соответствии с одним или несколькими вариантами осуществления настоящего изобретения будут описаны далее. Контроллер 12 указателя поворота включает в себя блок центральной обработки (CPU) в качестве операционной схемы, которая исполняет программы, хранящиеся в хранилище 13, чтобы тем самым реализовать функций устройства 100 управления. Программы, хранящиеся в хранилище 13, служат для управления указателем 20 поворота. Микропроцессор (MPU), интегральная схема специального назначения (ASIC), программируемая логическая интегральная схема (FPGA) или подобное также могут быть использованы в качестве операционной схемы. Хранилище 13 включает в себя ROM и оперативную память (RAM), которая служит хранилищем, к которому может быть осуществлен доступ.
[0043] Контроллер 12 указателя поворота устройства 100 управления реализует функцию обнаружения состояния, функцию определения управления движением и функцию управления временем мигания. Устройство 100 управления выполняет вышеописанные функции посредством взаимодействия программного обеспечения для реализации этих функций и вышеописанного аппаратного обеспечения.
[0044] Сначала будет описана функция обнаружения состояния контроллера 12 указателя поворота. Устройство 100 управления обнаруживает состояние указателя 20 поворота.
[0045] Устройство 100 управления согласно одному или нескольким вариантам осуществления настоящего изобретения выводит операционный сигнал, который вводится от переключателя 31 указателя поворота в качестве сигнала начала мигания в указатель 20 поворота, и управляет указателем 20 поворота для начала мигания. Когда сигнал начала мигания введен, устройство 100 управления обнаруживает момент, в который этот сигнал введен, в качестве момента для начала мигания указателя 20 поворота.
[0046] Кроме того, устройство 100 управления включает функцию одного касания указателя 20 поворота на основе операционного сигнала, который вводится от переключателя 31 указателя поворота. Когда операционный сигнал включает в себя информацию об «операции одного касания» переключателя 31 указателя поворота, устройство 100 управления включает функцию одного касания указателя 20 поворота. С другой стороны, когда операционный сигнал включает в себя информацию об «операции удержания» переключателя 31 указателя поворота, устройство 100 управления выключает функцию одного касания указателя 20 поворота. Как описано выше, когда функция автоматизированной или автономной смены полосы движения является действующей и операционный сигнал включает в себя информацию об «операции одного касания» переключателя 31 указателя поворота, контроллер 11 движения устройства 100 управления запускает процесс смены полосы движения посредством автоматизированного или автономного управления вождением.
[0047] Функция одного касания указателя 20 поворота будет описана далее.
[0048] Когда водитель включает функцию одного касания, указатель 20 поворота начинает мигать в ответ на сигнал начала мигания, который вводится от устройства 100 управления. Затем указатель 20 поворота мигает в течение времени мигания, которое включено в сигнал времени мигания, который вводится от устройства 100 управления, а после этого автоматически выключается. Например, когда водитель перемещает переключатель 31 указателя поворота вверх в пределах заданного диапазона без отклонения переключателя 31 указателя поворота из центрального положения в верхнее положение, левые мигающие указатели 21 принимают сигнал для включения функции одного касания, а также сигнал начала мигания. Левые мигающие указатели 21 начинают мигать, продолжают мигать в течение времени мигания, которое установлено устройством 100 управления, а затем автоматически выключаются.
[0049] С другой стороны, когда водитель выключает функцию одного касания, указатель 20 поворота начинает мигать или выключается в соответствии с положением (центральное положение, верхнее положение, нижнее положение) переключателя 31 указателя поворота. Например, когда водитель отклоняет переключатель 31 указателя поворота вверх из центрального положения в верхнее положение, левые мигающие указатели 21 принимают сигнал для выключения функции одного касания, а также сигнал начала мигания. Левые мигающие указатели 21 начинают мигать, а затем продолжают мигать до тех пор, пока водитель не вернет переключатель 31 указателя поворота из верхнего положения в центральное положение. Левые мигающие указатели 21 выключаются, когда водитель возвращает переключатель 31 указателя поворота в центральное положение.
[0050] Таким образом, когда водитель выполняет «операцию одного касания» переключателя 31 указателя поворота, указатель 20 поворота автоматически выполняет операцию от мигания до выключения. Поэтому нет необходимости строить сложную систему и/или обеспечивать сложное устройство управления для того, чтобы выключить указатель 20 поворота. Сценарий, в котором используется функция одного касания, меняется в зависимости от продолжительности времени мигания, но в целом функция одного касания с меньшей вероятностью будет использоваться в сценарии, в котором транспортное средство поворачивает направо или налево, поскольку такой сценарий требует относительно длительного времени мигания. Функция одного касания часто может использоваться в сценарии смены полосы движения, в котором достаточно относительно короткого времени мигания. Водитель может использовать функцию одного касания, чтобы указать намерение выполнить смену полосы движения в окружающую среду рассматриваемого транспортного средства. Дополнительно или в качестве альтернативы, когда функция автоматизированной или автономной смены полосы движения является действующей, водитель может использовать функцию одного касания для начала смены полосы движения с помощью автоматизированного или автономного управления вождением.
[0051] Функция обнаружения контроллера 12 указателя поворота будет описана вновь.
[0052] Устройство 100 управления определяет, начинают ли левые мигающие указатели 21 или правые мигающие указатели 22 мигать, на основе операционного сигнала, который вводится от переключателя 31 указателя поворота. Например, в случае праворульного транспортного средства, когда водитель отклоняет переключатель 31 указателя поворота от центрального положения в верхнее положение, устройство 100 управления определяет, что мигают левые мигающие указатели 21.
[0053] Далее будет описана функция определения управления движением контроллера 12 указателя поворота. Устройство 100 управления определяет, основано ли управление движением рассматриваемого транспортного средства на рулевом управлении водителем или на автоматизированном или автономном управлении вождением. Кроме того, когда определено, что осуществляется автоматизированное или автономное управление вождением, устройство 100 управления обнаруживает, установлена ли функция автоматизированной или автономной смены полосы движения в действующее или недействующее состояние.
[0054] Далее будет описана функция управления временем мигания указателя 20 поворота. Устройство 100 управления в соответствии с одним или несколькими вариантами осуществления настоящего изобретения управляет временем мигания указателя 20 поворота, когда функция одного касания включена. Другими словами, устройство 100 управления управляет временем мигания с момента начала мигания указателя 20 поворота до момента его автоматического выключения. Примеры конкретных сценариев включают в себя сценарий, в котором водитель приводит в действие переключатель 31 указателя поворота, чтобы указатель 20 поворота замигал, когда рассматриваемое транспортное средство меняет полосу движения. В этой операции устройство 100 управления управляет временем мигания указателя 20 поворота в соответствии с управлением движением рассматриваемого транспортного средства или ситуацией вокруг рассматриваемого транспортного средства. Устройство 100 управления в соответствии с одним или несколькими вариантами осуществления настоящего изобретения не управляет временем мигания указателя 20 поворота, когда функция одного касания выключена. Функция управления временем мигания, когда функция одного касания включена, будет описана ниже со ссылкой на конкретный сценарий смены полосы движения, используемый в качестве примера.
[0055] Описание будет сначала направлено на сценарий, в котором рассматриваемое транспортное средство меняет полосу движения посредством рулевого управления водителем. Когда управление движением рассматриваемого транспортного средства основано на рулевом управлении водителем, устройство 100 управления устанавливает заранее определенное время мигания (первое время мигания) в качестве времени мигания указателя 20 поворота. Первое время мигания относится к времени с момента начала мигания указателя 20 поворота до момента его автоматического выключения, и является временем, полученным путем умножения времени однократного мигания (например, несколько секунд) на число миганий. Интервал мигания может быть фиксированным временем. Первое время мигания в соответствии с одним или несколькими вариантами осуществления настоящего изобретения является временем, определяемым исходя из предположения, что смена полосы движения выполняется посредством рулевого управления водителем. В частности, первое время мигания является временем, во время которого намерение сменить полосу движения указывается для других транспортных средств, движущихся вокруг рассматриваемого транспортного средства. Один или несколько вариантов осуществления настоящего изобретения будут описаны исходя из предположения, что первое время мигания является временем, требуемым для мигания три раза (время однократного мигания равно одной секунде).
[0056] Метод установки первого времени мигания может включать в себя, например, предварительное сохранение первого времени мигания в хранилище 13. Устройство 100 управления считывает первое время мигания из хранилища 13 и устанавливает первое время мигания. Устройство 100 управления выводит информацию о времени мигания в качестве сигнала времени мигания в указатель 20 поворота. Способ установки первого времени мигания конкретным образом не ограничен. Например, водитель или пассажир рассматриваемого транспортного средства могут установить первое время мигания с помощью определенного устройства, пока транспортное средство стоит на месте.
[0057] Далее будет описан сценарий, в котором рассматриваемое транспортное средство меняет полосу движения посредством функции автоматизированной или автономной смены полосы движения при автоматизированном или автономном управлении вождением. В этом сценарии, устройство 100 управления обнаруживает, происходит ли рулевое управление водителем в пределах заранее определенного времени, включенного в период времени с момента начала мигания указателя 20 поворота до момента определения, является ли смена полосы движения с помощью автоматизированного или автономного управления вождением возможной. Это заранее определенное время может быть, но без ограничения, тем же самым временем, что и первое время мигания, или временем, которое меньше первого времени мигания.
[0058] При обнаружении рулевого управления водителем, пока указатель 20 поворота мигает, и определении, что направление рулевого управления водителем совпадает с направлением смены полосы движения с помощью автоматизированного или автономного управления вождением, устройство 100 управления управляет указателем 20 поворота, чтобы он мигал в течение первого времени мигания с момента, в который водитель выполнил рулевое управление. Далее это будет описано подробнее. Устройство 100 управления определяет, мигает ли указатель 20 поворота левыми мигающими указателями 21 или правыми мигающими указателями 22. Например, в случае, в котором левые мигающие указатели 21 мигают при повороте водителем рулевого колеса 32 влево, устройство 100 управления управляет левыми мигающими указателями, чтобы они мигали в течение первого времени мигания с момента, в который водитель повернул рулевое колесо 32. В случае, когда первое число миганий равно трем, при обнаружении рулевого управления водителем влево в момент времени, в который указатель 20 направления мигнул три раза, устройство 100 управления управляет левыми мигающими указателями, чтобы они мигнули дополнительные три раза с момента такого обнаружения.
[0059] Примеры сценария, в котором водитель осуществляет рулевое управление в направлении смены полосы движения пока указатель 20 поворота мигает, включают в себя сценарий, в котором необходимо внезапно изменить пункт назначения, и водитель решает, что он должен продолжить управление даже после смены полосы движения. Как описано выше, первое время мигания является временем, определяемым исходя из предположения, что смена полосы движения осуществляется рулевым управлением водителем. Таким образом, можно предотвратить ситуацию, при которой указатель 20 поворота выключается сразу после того, как рассматриваемое транспортное средство начинает менять полосу движения, и водитель может менять полосу движения без чувства дискомфорта.
[0060] С другой стороны, когда водитель не выполняет рулевое управление при мигании указателя 20 поворота, устройство 100 управления определяет, является ли смена полосы движения возможной с помощью автоматизированного или автономного управления вождением. При определении, что смена полосы движения не может быть выполнена, устройство 100 управления не продлевает первое время мигания. В этом сценарии, устройство 100 управления выводит сигнал мигания, указывающий первое время мигания, на указатель 20 поворота. Рассматриваемое транспортное средство движется в той же самой полосе без смены полосы движения, а указатель 20 поворота автоматически выключается после истечения первого времени мигания.
[0061] Для сравнения, при определении, что смена полосы движения может быть выполнена с помощью автоматизированного или автономного управления вождением, устройство 100 управления продлевает время мигания указателя 20 поворота. В частности, устройство 100 управления продлевает время мигания с первого времени мигания до второго времени мигания. Второе время мигания является временем, превышающим первое время мигания, и относится к времени с момента начала мигания указателя 20 поворота до момента его автоматического выключения.
[0062] Способ установки второго времени мигания конкретным образом не ограничен. Устройство 100 управления может увеличить число миганий, чтобы получить второе время мигания без изменения времени однократного мигания (например, одна секунда) относительно такового во время первого времени мигания. Например, когда первое число миганий равно трем, устройство 100 управления, например, устанавливает время, требуемое для мигания десять раз, в качестве второго времени мигания. В альтернативном варианте осуществления устройство 100 управления может увеличить время однократного мигания, чтобы получить второе время мигания без увеличения числа миганий относительно такового во время первого времени мигания. Когда первое число миганий составляет три (время однократного мигания составляет одну секунду), например, устройство 100 управления устанавливает три в качестве числа миганий для второго времени мигания (время однократного мигания равно трем секундам).
[0063] Способ установки второго времени мигания является примером, в котором используется конфигурация для изменения времени однократного мигания или числа миганий, но он этим не ограничивается. Например, устройство 100 управления может изменять как время однократного мигания, так и число миганий, чтобы установить второе время мигания на время, являющееся более длительным, чем первое время мигания. В этом случае, устройство 100 управления умножает время однократного мигания на число миганий, чтобы установить второе время мигания на время, являющееся более длительным, чем первое время мигания.
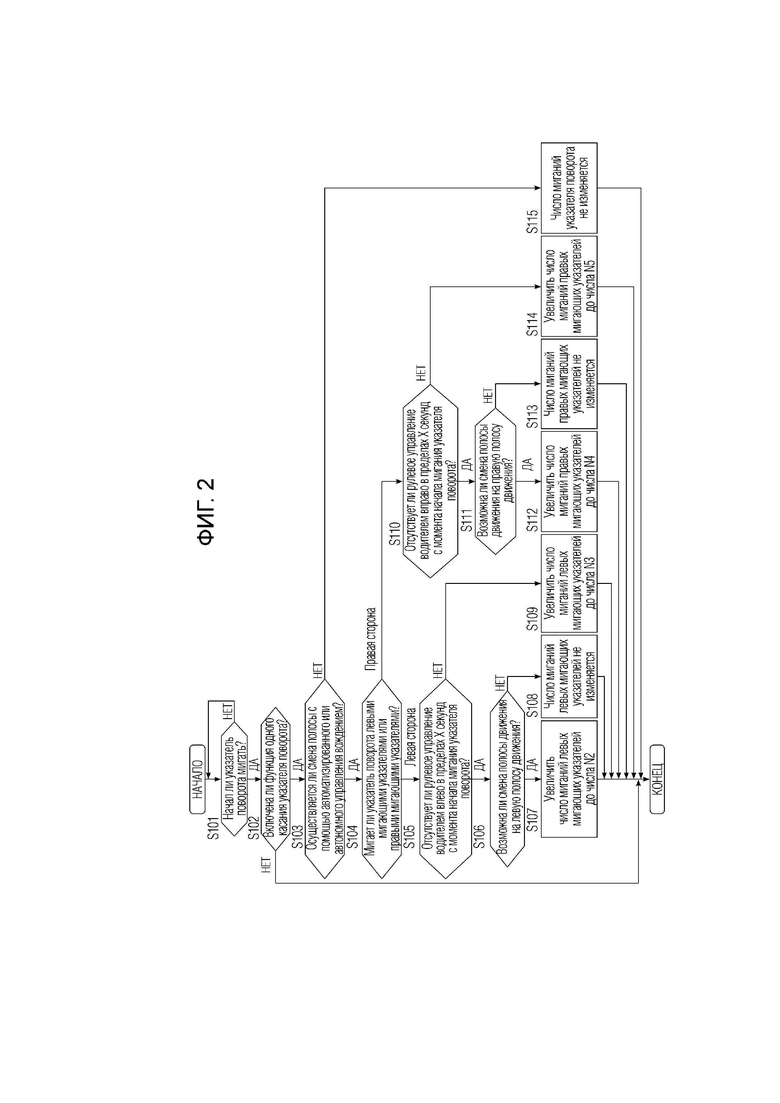
[0064] Функционирование устройства 100 управления в соответствии с одним или несколькими вариантами осуществления настоящего изобретения будет описано со ссылкой на блок–схему последовательности операций на ФИГ. 2. Предполагается, что в хранилище 13 предварительно сохраняется первое время мигания, которое представляется числом N1 (три раза), выступающим в качестве числа миганий.
[0065] На ФИГ. 2 время мигания (второе время мигания) указателя 20 поворота, продленное устройством 100 управления, представляется числами от N2 до N5. Для целей описания, описание выполняется исходя из предположения, что число N2=десять раз, число N3=шесть раз, число N4=десять раз и число N5=шесть раз, но эти числа могут быть установлены на оптимальные значения посредством экспериментов.
[0066] На этапе S101, устройство 100 управления определяет, действительно ли указатель 20 поворота начал мигать. Например, когда водитель приводит в действие переключатель 31 указателя поворота, операционный сигнал вводится в устройство 100 управления, поэтому устройство 100 управления определяет, начал ли указатель 20 поворота мигать, в соответствии с операционным сигналом. Когда начало мигания обнаружено, процесс переходит к этапу S102, при этом когда начало мигания не обнаружено, процесс осуществляет ожидание на этапе S101.
[0067] На этапе S102 устройство 100 управления включает или выключает функцию одного касания указателя 20 поворота. Устройство 100 управления включает или выключает функцию одного касания указателя 20 поворота на основе операционного сигнала, который вводится от переключателя 31 указателя поворота на этапе S101. Например, когда водитель перемещает переключатель 31 указателя поворота вверх или вниз в пределах заданного диапазона без отклонения переключателя 31 указателя поворота из центрального положения в верхнее положение или в нижнее положение, устройство 100 управления включает функцию одного касания. Когда функция одного касания включена, процесс переходит к этапу S103. С другой стороны, когда водитель отклоняет переключатель 31 указателя поворота из центрального положения в верхнее положение или в нижнее положение, устройство 100 управления выключает функцию одного касания указателя 20 поворота. Когда функция одного касания выключена, функционирование устройства 100 управления завершается.
[0068] На этапе S103, устройство 100 управления определяет, основано ли управление движением рассматриваемого транспортного средства на рулевом управлении водителем или на автоматизированном или автономном управлении вождением. За обнаружением рулевого управления водителем следует этап S115. При обнаружении автоматизированного или автономного управления вождением, устройство 100 управления обнаруживает, является ли функция автоматизированной или автономной смены полосы движения действующей или недействующей. При обнаружении, что функция автоматизированной или автономной смены полосы движения является действующей, процесс переходит на этап S104. При обнаружении, что функция автоматизированной или автономной смены полосы движения является недействующей, процесс переходит на этап S115.
[0069] На этапе S104, устройство 100 управления определяет, мигает ли указатель 20 поворота левыми мигающими указателями 21 или правыми мигающими указателями 22. В этот момент левые мигающие указатели 21 или правые мигающие указатели 22 мигают, в то время как рассматриваемое транспортное средство, движущееся с помощью с помощью автоматизированного или автономного управления вождением, полосу движения не меняет. Кроме того, устройство 100 управления начинает процесс смены полосы движения с помощью автоматизированного или автономного управления вождением. Когда сделано определение, что указатель поворота мигает левыми мигающими указателями 21, процесс переходит на этап S105. Когда сделано определение, что указатель поворота мигает правыми мигающими указателями 22, процесс переходит на этап S110.
[0070] На этапе S105 устройство 100 управления обнаруживает рулевое управление водителем влево в течение заранее определенного времени с момента начала мигания указателя 20 поворота. Это заранее определенное время относится к тому же самому времени, что и первое время мигания, или к времени, которое меньше первого времени мигания и составляет, например, время, равное нескольким секундам (X секунд). Когда рулевое управление водителем влево не обнаружено, процесс переходит на этап S106. Когда рулевое управление водителем влево обнаружено, процесс переходит на этап S109.
[0071] На этапе S106 устройство 100 управления определяет, возможно ли смена полосы движения на левую полосу движения. Левая полоса движения представляет собой полосу движения, прилегающую к левой стороне полосы движения, в которой движется рассматриваемое транспортное средство. Когда сделано определение, что смена полосы движения на левую полосу движения возможна, процесс переходит на этап S107. Когда сделано определение, что смена полосы движения на левую полосу движения не возможна, процесс переходит на этап S108.
[0072] На этапе S107 устройство 100 управления увеличивает число миганий левых мигающих указателей 21 до числа N2 (десять раз), превышающего число N1 (три раза). Устройство 100 управления выводит сигнал времени мигания, который указывает время мигания, соответствующее числу N2 (десять раз), на указатель 20 поворота. Когда время мигания левых мигающих указателей 21 продлено, функционирование устройства 100 управления завершается. В этот момент рассматриваемое транспортное средство движется с помощью автоматизированного или автономного управления вождением мигая левыми мигающими указателями 21. Кроме того, устройство 100 управления определяет, что смена полосы на левую полосу движения возможна с помощью автоматизированного или автономного управления вождением. Устройство 100 управления управляет левыми мигающими указателями 21, чтобы они мигали в течение длительного времени, соответствующего числу N2 (десять раз), а не выключает левые мигающие указатели 21 автоматически после мигания N1 раз (три раза).
[0073] На этапе S108 устройство 100 управления не изменяет число миганий левых мигающих указателей 21. Функционирование устройства 100 управления завершается без продления времени мигания левых мигающих указателей 21. В этот момент рассматриваемое транспортное средство движется с помощью автоматизированного или автономного управления вождением, мигая левыми мигающими указателями 21. Однако устройство 100 управления определяет, что смена полосы движения на левую полосу движения не возможна. В сценарии, в котором смена полосы движения с помощью автоматизированного или автономного управления вождением является затруднительной, число миганий излишне не продлевается. Указатель 20 поворота автоматически выключается после мигания N1 раз (три раза), так что может быть предотвращено принудительное отключение водителем указателя 20 поворота, который продолжает мигать.
[0074] Когда рулевое управление водителем влево обнаружено на этапе S105, процесс переходит на этап S109. На этапе S109 устройство 100 управления увеличивает число миганий левых мигающих указателей 21 до числа N3 (десять раз), превышающего число N1 (три раза). Устройство 100 управления выводит сигнал времени мигания, который указывает время мигания, соответствующее числу N3 (шесть раз), на указатель 20 поворота. Когда время мигания левых мигающих указателей 21 продлено, функционирование устройства 100 управления завершается. В этот момент рассматриваемое транспортное средство движется с помощью автоматизированного или автономного управления вождением, мигая левыми мигающими указателями 21. Затем водитель осуществляет рулевое управление влево, и рассматриваемое транспортное средство собирается начать смену полосы в левую сторону с помощью рулевого управления водителем.
[0075] Число N3 (шесть раз) получается за счет увеличения числа миганий на число N1 (три раза) с момента, в который водитель выполнил рулевое управление влево. Например, когда водитель осуществляет рулевое управление влево при третьем мигании левых мигающих указателей 21, устройство 100 управления складывает число N1, т.е. три, с числом миганий левых мигающих указателей 21, которые выполнены до момента осуществления рулевого управления водителем, т.е. также три. Устройство 100 управления устанавливает результат сложения, являющийся числом шесть, в качестве числа N3. Число миганий указателя 20 поворота увеличивается на число N1 (три раза), которое устанавливается исходя из предположения, что смена полосы движения осуществляется рулевым управлением водителем, в момент времени начала смены полосы движения водителем. Ситуация выключения указателя 20 поворота в середине смены полосы движения предотвращается, и водитель может менять полосу движения без чувства дискомфорта.
[0076] Когда на этапе S104 сделано определение, что указатель 20 поворота мигает правыми мигающими указателями 22, процесс переходит на этап S110. Этапы с S110 до S114 представляют собой операции устройства 100 управления, когда правыми мигающими указателями 22 управляют для мигания. Этапы с S110 до S114 являются такими же, что и этапы с S105 до S109, описанные выше, за исключением того, что мигающие указатели отличаются.
[0077] На этапе S110 устройство 100 управления обнаруживает рулевое управление водителем вправо в течение заранее определенного времени с момента начала мигания указателя 20 поворота. Заранее определенное время на этапе S110 устанавливается равным тому же времени (X секунд), что и заранее определенное время на этапе S105. В альтернативном варианте осуществления заранее определенное время на этапе S110 может отличаться от заранее определенного времени на этапе S105. Когда рулевое управление водителем вправо не обнаружено, процесс переходит на этап S111. Когда рулевое управление водителем вправо обнаружено, процесс переходит на этап S114. В этот момент правые мигающие указатели 22 начали мигать.
[0078] На этапе S111 устройство 100 управления определяет, возможна ли смена полосы движения на правую полосу движения. Правая полоса движения представляет собой полосу движения, прилегающую к правой стороне полосы движения, в которой движется рассматриваемое транспортное средство. Когда сделано определение, что смена полосы движения на правую полосу движения возможна, процесс переходит на этап S112. Когда сделано определение, что смена полосы движения на правую полосу движения не возможна, процесс переходит на этап S113.
[0079] На этапе S112 устройство 100 управления увеличивает число миганий правых мигающих указателей 22 до числа N4 (десять раз), превышающего число N1 (три раза). Устройство 100 управления выводит сигнал времени мигания, который указывает время мигания, соответствующее числу N4 (десять раз), на указатель 20 поворота. Когда время мигания правых мигающих указателей 22 продлено, функционирование устройства 100 управления завершается. В этот момент рассматриваемое транспортное средство движется с помощью автоматизированного или автономного управления вождением, мигая правыми мигающими указателями 22. Кроме того, устройство 100 управления определяет, что смена полосы на правую полосу движения возможна с помощью автоматизированного или автономного управления вождением. Устройство 100 управления управляет правыми мигающими указателями 22, чтобы они мигали в течение длительного времени, соответствующего числу N4 (десять раз), а не выключает правые мигающие указатели 22 автоматически после мигания N1 раз (три раза).
[0080] На этапе S113 устройство 100 управления не изменяет число миганий правых мигающих указателей 21. Функционирование устройства 100 управления завершается без продления времени мигания правых мигающих указателей 22. В этот момент рассматриваемое транспортное средство движется с помощью автоматизированного или автономного управления вождением, мигая правыми мигающими указателями 22. Однако устройство 100 управления определяет, что смена полосы движения на правую полосу движения не возможна.
[0081] Когда рулевое управление водителем вправо обнаружено на этапе S110, процесс переходит на этап S114. На этапе S114 устройство 100 управления увеличивает число миганий правых мигающих указателей 22 до числа N5 (шесть раз), превышающего число N1 (три раза). Устройство 100 управления выводит сигнал времени мигания, который указывает время мигания, соответствующее числу N5 (шесть раз), на указатель 20 поворота. Когда время мигания правых мигающих указателей 22 продлено, функционирование устройства 100 управления завершается. В этот момент рассматриваемое транспортное средство движется с помощью автоматизированного или автономного управления вождением, мигая правыми мигающими указателями 22. Затем водитель осуществляет рулевое управление вправо, и рассматриваемое транспортное средство собирается начать смену полосы в правую сторону с помощью рулевого управления водителем. Приведенное выше описание числа N3 (шесть раз) на этапе S105 используется для описания числа N5.
[0082] Когда рулевое управление водителем обнаружено на этапе S103, процесс переходит на этап S115. На этапе S115 устройство 100 управления не изменяет число миганий левых мигающих указателей 21 или правых мигающих указателей 22. Функционирование устройства 100 управления завершается без увеличения числа миганий указателя 20 поворота. В этот момент рассматриваемое транспортное средство движется посредством рулевого управления водителем. Указатель 20 поворота автоматически выключается после мигания N1 раз (три раза), что задано исходя из предположения, что смена полосы движения осуществляется рулевым управлением водителем.
[0083] В случае смены полосы движения посредством рулевого управления водителя, как правило, водитель подтверждает окружающую среду и управляет указателем 20 поворота, чтобы он мигал в ситуации, в которой смена полосы движения может быть выполнена. С другой стороны, при смене полосы движения с помощью автоматизированного или автономного управления вождением, можно предположить, что водитель управляет указателем 20 поворота и запускает процесс смены полосы движения в момент времени, желаемый самим водителем, независимо от окружающей ситуации. Таким образом, если требуется время, чтобы проверить окружающую ситуацию, или если требуется время, чтобы определить, что смена полосы движения возможна, указатель 20 поворота может выключиться во время смены полосы движения. Однако в одном или нескольких вариантах осуществления настоящего изобретения число миганий, к счастью, устанавливается с учетом характеристик автоматизированного или автономного управления вождением, и, следовательно, может быть предоставлено устройство 100 управления, которое может выполнять смену полосы движения, аналогично смене полосы движения рулевым управлением водителем, и может уменьшить вероятность того, что указатель 20 поворота выключает мигание во время смены полосы движения. В частности, в транспортном средстве, способном как к управлению движением с помощью автоматизированного или автономного управления вождением, так и к управлению движением с помощью рулевого управления водителем, устранение чувства дискомфорта водителя из–за разницы во времени выключения является благоприятным.
[0084] Как описано выше, устройство 100 управления в соответствии с одним или несколькими вариантами осуществления настоящего изобретения управляет указателем 20 поворота, снабженным функцией одного касания. Указатель 20 поворота начинает мигать в ответ на приведение в действие водителем переключателя 31 указателя поворота и автоматически выключается после истечения первого времени мигания, которое задается исходя из предположения, что смена полосы движения выполняется водителем. Когда рассматриваемое транспортное средство меняет полосу движения с помощью автоматизированного или автономного управления вождением вследствие приведения в действие водителем переключателя 31 указателя поворота, устройство 100 управления продлевает первое время мигания до второго времени мигания, являющегося более длительным, чем первое время мигания, и управляет указателем 20 поворота для автоматического выключения. Благодаря этой операции водителю не нужно выполнять операцию выключения указателя 20 поворота, нет необходимости в усложненном управлении для выключения указателя 20 поворота и указатель 20 поворота мигает лишь на протяжении того времени, которое является подходящим для сценария смены полосы движения. В результате можно уменьшить нагрузку на водителя транспортного средства, которое может менять полосу движения в автоматизированном или автономном режиме.
[0085] Кроме того, когда рассматриваемое транспортное средство меняет полосу движения с помощью автоматизированного или автономного управления вождением, устройство 100 управления в соответствии с одним или несколькими вариантами осуществления настоящего изобретения определяет во время первого времени мигания, может ли рассматриваемое транспортное средство менять полосу движения, на основе результата обнаружения с камеры 41, радара 42 или устройства 43 связи. При определении того, что рассматриваемое транспортное средство может менять полосу движения, устройство 100 управления продлевает первое время мигания до второго времени мигания. Это может предотвратить выключение указателя 20 поворота во время смены полосы движения, а также может предотвратить ситуацию, в которой водитель вынужден выполнить принудительное включение указателя 20 поворота.
[0086] Кроме того, когда рассматриваемое транспортное средство меняет полосу движения с помощью автоматизированного или автономного управления вождением, устройство 100 управления в соответствии с одним или несколькими вариантами осуществления настоящего изобретения определяет во время первого времени мигания, выполнил ли водитель рулевое управление в направлении смены полосы движения, на основе результата обнаружения с датчика 44 угла поворота рулевого колеса и датчика 45 пространственного положения. При определении того, что водитель выполнил рулевое управление в направлении смены полосы движения, устройство 100 управления управляет указателем 20 поворота для мигания на протяжении первого времени мигания с момента, в который водитель выполнил рулевое управление. Это позволяет указателю 20 поворота мигать в течение первого времени мигания, чтобы совпасть с моментом времени, когда водитель начинает менять полосу движения, а затем указатель 20 поворота автоматически выключается. В результате, можно подавить чувство дискомфорта у водителя из–за времени выключения.
[0087] Варианты осуществления настоящего изобретения были описаны выше, но эти варианты осуществления описаны для облегчения понимания настоящего изобретения, а не для ограничения настоящего изобретения. Поэтому предполагается, что элементы, раскрытые в вышеуказанных вариантах осуществления, включают в себя все изменения в конструкции и эквиваленты, подпадающие под объем технических сведений в настоящем изобретении.
[0088] Например, в вышеописанных вариантах осуществления, во время движения с помощью автоматизированного или автономного управления вождением при одновременном мигании указателя 20 поворота, устройство 100 управления может выключать указатель 20 поворота при обнаружении рулевого управления водителем и определении того, что направление рулевого управления водителем противоречит направлению смены полосы движения с помощью автоматизированного или автономного управления вождением. Благодаря этой операции намерение не менять полосу движения указывается другим транспортным средствам, движущимся рядом с рассматриваемым транспортным средством, не заставляя водителя выключать указатель 20 поворота. Примеры сценария, в котором водитель осуществляет рулевое управление в противоположном направлении относительно направления смены полосы движения, пока указатель 20 поворота мигает, включают в себя сценарий, в котором водитель решает двигаться прямо вперед, а не менять полосу движения.
[0089] В настоящем описании система 1 управления описывается как пример, который включает в себя устройство 100 управления в качестве варианта осуществления устройства управления в соответствии с настоящим изобретением, но этим настоящее изобретение не ограничивается.
[0090] В настоящем описании устройство 100 управления, которое включает в себя контроллер 11 движения, контроллер 12 указателя поворота и хранилище 13, описывается как вариант осуществления процессора в соответствии с настоящим изобретением, но настоящее изобретение этим не ограничивается.
[0091] В настоящем описании указатель 20 поворота, снабженный функцией одного касания, описывается как вариант осуществления указателя поворота в соответствии с настоящим изобретением, но этим настоящее изобретение не ограничивается.
[0092] В настоящем описании время мигания, соответствующее числу N1, описывается как вариант осуществления первого времени мигания в соответствии с настоящим изобретением, но этим настоящее изобретение не ограничивается.
[0093] В настоящем описании время мигания, соответствующее каждому из чисел с N2 по N5, описывается как вариант осуществления второго времени мигания в соответствии с настоящим изобретением, но этим настоящее изобретение не ограничивается.
[0094] В настоящем описании рассматриваемое транспортное средство описывается как пример, включающий в себя камеру 41, радар 42 или устройство 43 связи в качестве варианта осуществления первого средства обнаружения в соответствии с настоящим изобретением, но этим настоящее изобретение не ограничивается.
[0095] В настоящем описании рассматриваемое транспортное средство описывается как пример, включающий в себя датчик 44 угла поворота рулевого колеса или датчик 45 пространственного положения в качестве варианта осуществления второго средства обнаружения в соответствии с настоящим изобретением, но этим настоящее изобретение не ограничивается.
[0096] В настоящем описании «операция одного касания» описывается как пример варианта осуществления операции водителя в соответствии с настоящим изобретением, но этим настоящее изобретение не ограничивается.
Описание позиционных обозначений
[0097]
1 Система управления
100 Устройство управления
11 Контроллер движения
12 Контроллер указателя поворота
13 Хранилище
20 Указатель поворота
21 Левые мигающие указатели
22 Правые мигающие указатели
30 Устройство рулевого управления
31 Переключатель указателя поворота
32 Рулевое колесо
33 Привод рулевого управления
40 Устройство обнаружения
41 Камера
42 Радар
43 Устройство связи
44 Датчик угла поворота рулевого колеса
45 Датчик пространственного положения
Группа изобретений относится к устройству для управления указателем поворота. Устройство управления указателем поворота содержит процессор, выполненный с возможностью управления временем мигания указателя поворота, и определения, установлена ли функция автоматизированной или автономной смены полосы движения. Функция автоматизированной или автономной смены полосы движения является функцией смены полосы движения автоматизированным или автономным образом с полосы движения, по которой движется рассматриваемое транспортное средство, на другую полосу движения, в ответ на упомянутую операцию водителя. При определении, что функция автоматизированной или автономной смены полосы движения не установлена, время мигания указателя поворота устанавливается в первое время мигания, а при определении, что функция автоматизированной или автономной смены полосы движения установлена, время мигания указателя поворота устанавливается во второе время мигания, которое является более длительным, чем первое время мигания. Достигается уменьшение нагрузки на водителя транспортного средства, которое может менять полосу движения в автоматизированном или автономном режиме. 2 н. и 2 з.п. ф-лы, 2 ил.
1. Способ управления указателем поворота с использованием процессора, причем способ содержит:
управление временем мигания указателя поворота, выполненного с возможностью начинать мигать в ответ на операцию водителя рассматриваемого транспортного средства и автоматически выключаться, при этом время мигания начинается с момента начала мигания указателя поворота до момента автоматического выключения этого указателя поворота; и
определение, установлена ли функция автоматизированной или автономной смены полосы движения,
при этом функция автоматизированной или автономной смены полосы движения является функцией смены полосы движения автоматизированным или автономным образом с полосы движения, по которой движется рассматриваемое транспортное средство, на другую полосу движения, в ответ на упомянутую операцию водителя,
при этом управление движением рассматриваемого транспортного средства основано на рулевом управлении водителем или на функции автоматизированной или автономной смены полосы движения, и
при этом:
при определении, что функция автоматизированной или автономной смены полосы движения не установлена, время мигания указателя поворота устанавливают в первое время мигания; и
при определении, что функция автоматизированной или автономной смены полосы движения установлена, время мигания указателя поворота устанавливают во второе время мигания, которое является более длительным, чем первое время мигания.
2. Способ управления указателем поворота по п. 1, содержащий:
когда рассматриваемое транспортное средство меняет полосу движения в автоматизированном или автономном режиме, определение в течение первого времени мигания, может ли рассматриваемое транспортное средство менять полосу движения, на основе результата обнаружения первого блока обнаружения, которым оборудовано рассматриваемое транспортное средство, для обнаружения ситуации вокруг рассматриваемого транспортного средства; и
при определении того, что рассматриваемое транспортное средство может менять полосу движения, продление первого времени мигания до второго времени мигания.
3. Способ управления указателем поворота по п. 1 или 2, содержащий:
когда рассматриваемое транспортное средство меняет полосу движения в автоматизированном или автономном режиме, определение в течение первого времени мигания, выполнил ли водитель рулевое управление в направлении смены полосы движения, на основе результата обнаружения второго блока обнаружения, которым оборудовано рассматриваемое транспортное средство, для обнаружения направления рулевого управления, выполненного водителем; и
при определении того, что водитель выполнил рулевое управление в направлении смены полосы движения, управление указателем поворота для мигания на протяжении первого времени мигания с момента, в который водитель выполнил рулевое управление.
4. Устройство управления указателем поворота, причем устройство содержит процессор, выполненный с возможностью:
управления временем мигания указателя поворота, выполненного с возможностью начинать мигать в ответ на операцию водителя рассматриваемого транспортного средства и автоматически выключаться, при этом время мигания начинается с момента начала мигания указателя поворота до момента автоматического выключения этого указателя поворота; и
определения, установлена ли функция автоматизированной или автономной смены полосы движения,
при этом функция автоматизированной или автономной смены полосы движения является функцией смены полосы движения автоматизированным или автономным образом с полосы движения, по которой движется рассматриваемое транспортное средство, на другую полосу движения, в ответ на упомянутую операцию водителя,
при этом управление движением рассматриваемого транспортного средства основано на рулевом управлении водителем или на функции автоматизированной или автономной смены полосы движения, и
при этом:
при определении, что функция автоматизированной или автономной смены полосы движения не установлена, время мигания указателя поворота устанавливается в первое время мигания; и
при определении, что функция автоматизированной или автономной смены полосы движения установлена, время мигания указателя поворота устанавливается во второе время мигания, которое является более длительным, чем первое время мигания.
| US 2015022336 A1, 22.01.2005 | |||
| US 2016185279 А1, 30.06.2016 | |||
| JP 2010018184 А, 28.01.2010 | |||
| JP 2006117047 A, 11.05.2006. |

