Область техники, к которой относится изобретение
Изобретение относится к области железнодорожной автоматики и телемеханики, в частности к средствам диагностики рельсовых цепей и средств измерения сопротивления поездного шунта.
Уровень техники
Существуют случаи возникновения опасного отказа рельсовых цепей -ложной свободности. В большинстве случаев опасный отказ возникает при проследовании легкой подвижной единицы - хозяйственного поезда или платформы для перевозки грузов, имеющей две оси. При этом причины возникновения опасного отказа в настоящее время недостаточно изучены. Причиной возникновения опасного отказа может быть или влияние помехи, что исключается в случае хозяйственных подвижных единиц, или неотрегулированная рельсовая цепь или повышенное сопротивление поездного шунта. Таким образом, основной задачей является определить величину сопротивления поездного шунта, что позволит точно определить при расследовании инцидента причину возникновения ложной свободности рельсовой цепи.
Известен способ определения параметров рельсовой цепи, основанный на измерении модулей напряжения в начале и конце рельсовой цепи, нагруженной на известное сопротивление (Брылеев A.M., Шишляков В.А., Кравцов Ю.А. Устройство и работа рельсовых цепей. - М: Транспорт, 1966. - 264 с.).
Недостатком указанного способа, является то, что с его помощью нельзя измерить сопротивление шунта подвижной единицы.
Известны способ и устройство измерения сопротивления поездного шунта (RU 2369507, B61L 23/16, 10.10.2009). В способе измеряют напряжение контролируемой рельсовой линии перед вступлением поезда на смежную рельсовую линию при свободном состоянии контрольной и другой смежной рельсовой линии, по которому определяют сопротивление изоляции. Затем измеряют напряжение контролируемой рельсовой линии в течение всего времени ее занятия. По этому напряжению определяют минимальное значение напряжения. По значениям сопротивления изоляции и минимальному значению напряжения определяют сопротивление поездного шунта. Устройство определения фактического сопротивления поездного шунта содержит путевой генератор, рельсовую линию, согласующие трансформаторы, полосовой фильтр, выпрямитель, сглаживающий фильтр, аналого-цифровой преобразователь, тактовый генератор, постоянное программируемое запоминающее устройство. Оно дополнительно содержит путевые реле, регистры, триггер.
Указанные способ и устройство обладают существенным недостатком, связанным с невозможностью определения колесной пары и места наложения шунта вдоль рельсовой линии, что делает недостаточным информацию, получаемую для расследования случаев возникновения ложной свободности.
Наиболее близким по технической сущности к заявляемому объекту является способ измерения сопротивления поездного шунта и устройство, его реализующее (Ле Тхи Ван Ань. Микропроцессорная система контроля перегона для участков с полуавтоматической блокировкой: диссертация на соискание ученой степени кандидата технических наук: 05.22.08. - Москва, 1996. - 151 с.: ил.). Устройство содержит источник питания, подключенный к рельсовой линии последовательно через эталонное сопротивление, при этом напряжения источника питания и на эталонном сопротивлении записываются в регистраторе на съемную карту при передвижении подвижного состава по рельсовой линии, по окончании эксперимента съемная карта переносится на стационарную ЭВМ или специализированный программный анализатор, с выхода которого подается и запоминается в регистраторе значения сопротивления поездного шунта при перемещении подвижного состава вдоль рельсовой линии. Данное устройство взято за прототип.
К недостаткам прототипа можно отнести отсутствие возможности точного определения сопротивления поездного шунта с поправкой на сопротивление рельсов, а также невозможность указать точное местоположение поездного шунта, при котором возникает ложная свободность.
Раскрытие изобретения
Техническим результатом, на достижение которого направлено данное изобретение, является установление причины возникновения ложной свободности и фиксации сопротивления поездного шунта и отдельной колесной пары с учетом переходных сопротивлений колесо-рельс.
Сущность изобретения состоит в том, что система мониторинга ложной свободности рельсовой цепи и сопротивления поездного шунта двуосных подвижных единиц, содержащая два рельса, аппаратуру питающего и релейного концов рельсовой цепи, на которых располагается двухосная подвижная единица, дополнительно на подвижной единице содержит первый, второй, третий и четвертый токовые датчики, блок определения координаты, блок обработки информации, блок индикации и передатчик; а также дополнительно содержит линию связи и приемник, формирующие совместно передатчиком беспроводной канал передачи информации, блок измерений, анализатор работы рельсовой цепи, блок памяти и автоматизированное рабочее место; при этом первый, второй, третий и четвертый токовые датчики, располагаемые на подвижной единице таким образом, что измеряют соответственно ток в рельсовой цепи до подвижной единицы, токи на первой и второй колесных парах, а также ток в рельсовой цепи после подвижной единицы, своими выходами соединяются с соответствующими входами блока обработки информации, блок определения координаты своим выходом соединен с соответствующим входом блока обработки информации, блок индикации своим входом соединен с соответствующим выходом блока обработки информации; к соответствующему выходу блока обработки информации подключен передатчик, который с последовательно включенными линией связи и приемником организует беспроводной канал передачи информации, при этом выход приемника соединен с соответствующим входом анализатора работы рельсовой цепи; к выходу аппаратуры релейного конца рельсовой цепи подключается блок измерений, своим выходом соединенный с соответствующим входом анализатора работы рельсовой цепи; при этом к соответствующим выходам анализатора работы рельсовой цепи подключается автоматизированное рабочее место и блок памяти.
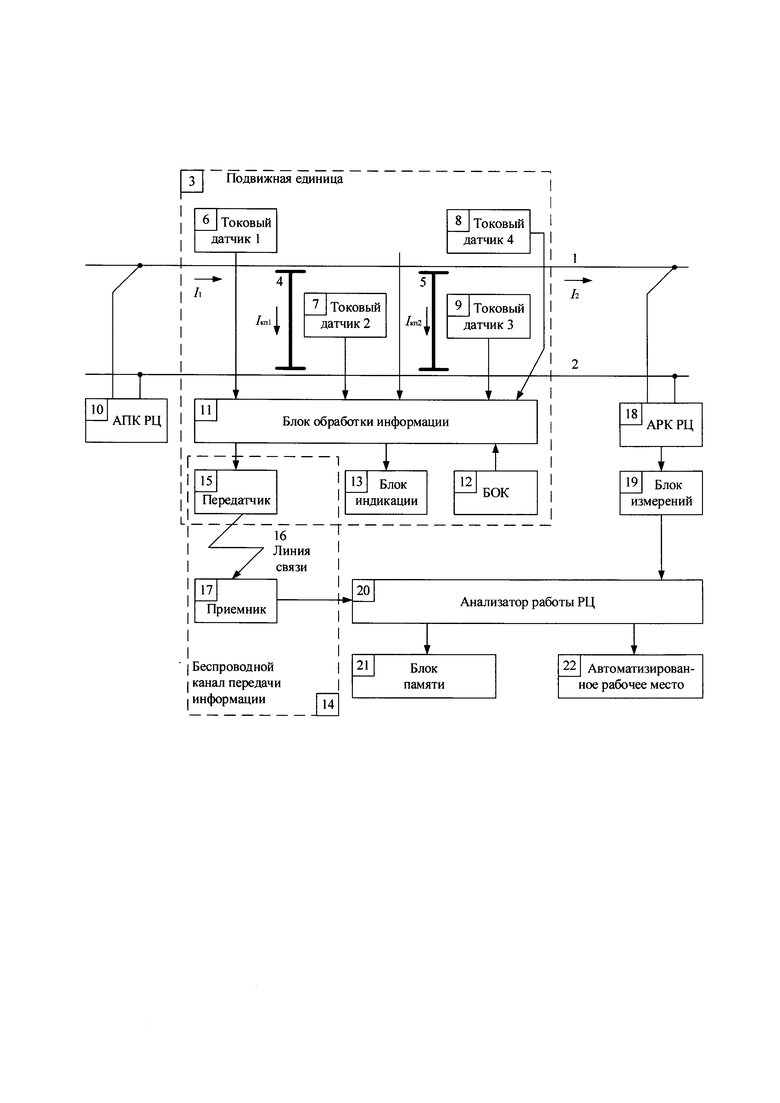
Краткое описание чертежей Предлагаемое изобретение иллюстрируется чертежом, на котором приведена функциональная схема системы мониторинга ложной свободности рельсовой цепи и сопротивления поездного шунта двуосных подвижных единиц.
Осуществление изобретения
Система мониторинга ложной свободности рельсовой цепи и сопротивления поездного шунта двуосных подвижных единиц содержит первый и второй рельсы 1 и 2, к которым с одной стороны подключается аппаратура питающего конца рельсовой цепи (АПК РЦ) 10, а с другой стороны аппаратура релейного конца рельсовой цепи (АРК РЦ) 18; на первом и втором рельсах 1 и 2 располагается подвижная единица 3, имеющая две колесные пары 4 и 5 и на которой размещаются первый, второй, третий и четвертый токовые датчики 6, 7, 8, 9, блок обработки информации 11, блок определения координаты (БОК) 12, блок индикации 13 и передатчик 15, входящий в состав беспроводного канала передачи информации 14; первый, второй, третий и четвертый токовые датчики 6, 7, 8, 9, а также блок определения координаты (БОК) 12 своими выходами соединяются с соответствующими входами блока обработки информации 11, соответствующие выходы блока обработки информации 11 соединяются со входами блока индикации 13 и передатчика 15; передатчик 15 последовательно через линию связи 16 и приемник 17, также входящих в состав беспроводного канала передачи информации 14, соединяется с соответствующим входом анализатора работы рельсовой цепи (РЦ) 20, к другому входу анализатора работы рельсовой цепи (РЦ) 20 последовательно через блок измерений 19 подключается аппаратура релейного конца рельсовой цепи (АРК РЦ) 18; соответствующие выходы анализатора работы рельсовой цепи (РЦ) 20 соединены со входами блока памяти 21 и автоматизированного рабочего места 22.
Система работает следующим образом. В рельсовой цепи по первому и второму рельсам 1 и 2, протекает сигнальный ток, вырабатываемый аппаратурой питающего конца рельсовой цепи 10. На подвижной единице 3, содержащей две колесные пары (4 и 5), устанавливаются токовые датчики 1-4 (блоки 6-9), блок определения координаты 12. Токовый датчик может быть выполнен в виде типовой приемной локомотивной катушки или аналогового датчика Холла. Блок определения координаты 12 может быть выполнен как система спутникового позиционирования или одометр.
Токовый датчик 1 измеряет ток, протекающий до подвижной единицы I1, токовый датчик 4 - после подвижной единицы - I2. Токовый датчик 2 фиксирует ток в первой по ходу движения колесной паре Iкп1 токовый датчик 3 фиксирует ток во второй по ходу движения колесной паре - Iкп2.
Данные от токовых датчиков 1-4, а также информация от блока определения координаты 12 поступают на вход блока обработки информации 11. Блок обработки информации 11 может быть выполнен в виде микроконтроллера и аналогово-цифрового преобразователя. В оцифрованных сигналах от токовых датчиков выделяется частота сигнального тока данной рельсовой цепи, после чего блок обработки информации 11 рассчитывает по полученным величинам токов и величине сопротивления, включенного параллельно второй колесной паре 5 (включающее в себя входное сопротивление аппаратуры релейного конца рельсовой цепи 18, сопротивление рельсов, соединяющих вторую колесную пару 5 и аппаратуру релейного конца рельсовой цепи 18, а также, при отсутствии изолирующих стыков - волновое сопротивление смежной рельсовой линии) величины соответствующих сопротивлений колесных пар и поездного шунта в целом.
Расчет производится на знании того, что ток в первой ветви электрической цепи равен току в неразветвленной части электрической цепи, умноженному на сопротивление второй ветви и деленному на сумму сопротивлений обеих ветвей.
Так, сопротивление второй колесной пары 5 определяется по формуле:
RКП2=(RК*I2)/IКП2,
где RКП2 - сопротивление второй колесной пары 5;
RК - сопротивление, учитывающее входное сопротивление аппаратуры релейного конца рельсовой цепи 18, сопротивление рельсов, соединяющих вторую колесную пару 5 и аппаратуру релейного конца рельсовой цепи 18, а также, при отсутствии изолирующих стыков - волновое сопротивление смежной рельсовой линии;
IКП2 - ток сигнальной частоты, протекающий через вторую колесную пару 5;
I2 - ток сигнальной частоты, протекающий через аппаратуру релейного конца рельсовой цепи 18.
Если сопротивление поездного шунта не соответствует норме, т.е. выше величины 0,06 Ом, на блоке индикации 13, расположенном в кабине машиниста, выводится соответствующее предупреждение.
На основании данных от блока определения координаты 12 полученные сопротивления привязываются к координате участка пути и далее поступают на вход передатчика 15, который транслирует информацию по линии связи 16 на вход приемника 17. При этом передатчик 15, линия связи 16 и приемник 17 вместе образуют беспроводной канал передачи информации 14.
Информация о состоянии рельсовой цепи (ток через пороговый элемент, состояние рельсовой цепи - свободность или занятость) воспринимает от аппаратуры релейного конца рельсовой цепи 18 блок измерений 19. Измеренные параметры передаются на вход анализатора работы рельсовой цепи 20.
Информация со входа приемника 17 поступает на вход анализатора работы рельсовой цепи (РЦ) 20.
Анализатор работы рельсовой цепи (РЦ) 20 сопоставляет между собой информацию о состоянии рельсовой цепи, данных о координате подвижной единицы 3 и сопротивлений ее колесных пар 4 и 5 и сопротивлении поездного шунта в целом.
Данные регистрируются в блоке памяти 21 и передаются на автоматизированное рабочее место 22. Оператор, находясь за автоматизированным рабочим местом, контролирует состояние рельсовой цепи и сопротивление поездного шунта. В случае возникновения ложной свободности оператор контролирует сопротивление поездного шунта и координату местоположения подвижной единицы. Таким образом представляется возможным точно установить причину возникновения ложной свободности: повышенное сопротивление поездного шунта или неотрегулированная рельсовая цепь.
Устройство позволяет расширить возможности диагностики функционирования рельсовых цепей, позволяет установить величину сопротивления поездного шунта и установить причину возникновения опасного отказа - ложной свободности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ СОПРОТИВЛЕНИЯ ПОЕЗДНОГО ШУНТА ПРИ ЦЕНТРАЛИЗОВАННОМ РАЗМЕЩЕНИИ АППАРАТУРЫ РЕЛЬСОВОЙ ЦЕПИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2748742C1 |
| Способ измерения сопротивления поездного шунта | 2024 |
|
RU2827533C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПЕРЕХОДНОГО СОПРОТИВЛЕНИЯ МЕЖДУ КАЖДОЙ КОЛЕСНОЙ ПАРОЙ И РЕЛЬСАМИ | 2020 |
|
RU2744490C1 |
| Способ проверки выполнения шунтового режима работы электрической рельсовой цепи | 2022 |
|
RU2791474C1 |
| Устройство для позиционирования рельсового транспорта | 2021 |
|
RU2768805C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ И СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ЕЮ РЕАЛИЗУЕМЫЙ | 2014 |
|
RU2572278C1 |
| СПОСОБ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ СОПРОТИВЛЕНИЯ ПОЕЗДНОГО ШУНТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2750137C1 |
| СПОСОБ КОНТРОЛЯ ЦЕЛОСТНОСТИ РЕЛЬСОВЫХ НИТЕЙ С ПОДВИЖНОГО СОСТАВА | 2021 |
|
RU2754374C1 |
| Устройство контроля перегона | 2024 |
|
RU2829877C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВЫХ ЦЕПЕЙ | 2017 |
|
RU2658627C1 |
Изобретение относится к области железнодорожной автоматики и телемеханики, в частности к средствам диагностики рельсовых цепей и средств измерения сопротивления поездного шунта. Сущность: система мониторинга ложной свободности рельсовой цепи и сопротивления поездного шунта двуосных подвижных единиц содержит два рельса, аппаратуру питающего и релейного концов рельсовой цепи. На рельсах располагается двухосная подвижная единица. На подвижной единице установлены первый, второй, третий и четвертый токовые датчики, блок определения координаты, блок обработки информации, блок индикации, беспроводной канал передачи информации в составе передатчика, линии связи и приемника, блок измерений, анализатор работы рельсовой цепи, блок памяти и автоматизированное рабочее место. Технический результат: установление причины возникновения ложной свободности и фиксация сопротивления поездного шунта и отдельной колесной пары с учетом переходных сопротивлений колесо-рельс. 1 ил.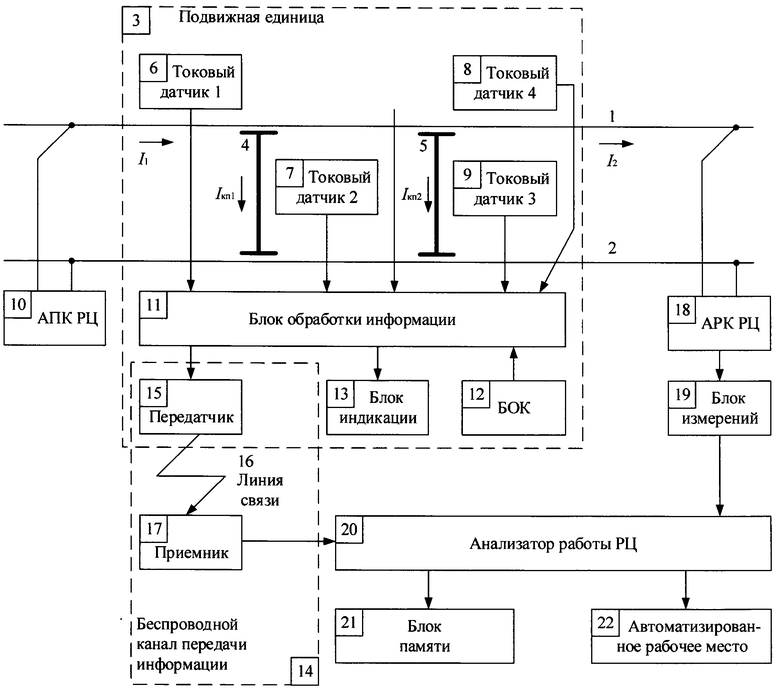
Система мониторинга ложной свободности рельсовой цепи и сопротивления поездного шунта двуосных подвижных единиц, содержащая два рельса, аппаратуру питающего и релейного концов рельсовой цепи, отличающаяся тем, что дополнительно на подвижной единице содержит первый, второй, третий и четвертый токовые датчики, блок определения координаты, блок обработки информации, блок индикации и передатчик; а также дополнительно содержит линию связи и приемник, формирующие совместно c передатчиком беспроводной канал передачи информации, блок измерений, анализатор работы рельсовой цепи, блок памяти и автоматизированное рабочее место; при этом первый, второй, третий и четвертый токовые датчики, расположенные на подвижной единице таким образом, что измеряют соответственно ток в рельсовой цепи до подвижной единицы, токи на первой и второй колесных парах, а также ток в рельсовой цепи после подвижной единицы, своими выходами соединены с соответствующими входами блока обработки информации, блок определения координаты своим выходом соединен с соответствующим входом блока обработки информации, блок индикации своим входом соединен с соответствующим выходом блока обработки информации; к соответствующему выходу блока обработки информации подключен передатчик, который с последовательно включенными линией связи и приемником организует беспроводной канал передачи информации, при этом выход приемника соединен с соответствующим входом анализатора работы рельсовой цепи; к выходу аппаратуры релейного конца рельсовой цепи подключен блок измерений, своим выходом соединенный с соответствующим входом анализатора работы рельсовой цепи; при этом к соответствующим выходам анализатора работы рельсовой цепи подключено автоматизированное рабочее место и блок памяти.
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ СОПРОТИВЛЕНИЯ ПОЕЗДНОГО ШУНТА | 2008 |
|
RU2369507C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗОНЫ ДОПОЛНИТЕЛЬНОГО ШУНТИРОВАНИЯ | 2007 |
|
RU2353537C1 |
| СПОСОБ КОНТРОЛЯ СВОБОДНОСТИ РЕЛЬСОВОЙ ЛИНИИ | 2008 |
|
RU2361764C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДОПОЛНИТЕЛЬНОЙ ЗОНЫ ШУНТИРОВАНИЯ ОТНОСИТЕЛЬНОЙ РЕЛЬСОВОЙ ЦЕПИ | 2003 |
|
RU2250847C2 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОЙ ЛИНИИ | 2011 |
|
RU2492089C2 |
| СПОСОБ КОНТРОЛЯ НАХОЖДЕНИЯ ПОДВИЖНОГО СОСТАВА НА УЧАСТКЕ ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2508215C1 |
| СПОСОБ ОБРАБОТКИ ПРИЗАБОЙНОЙ ЗОНЫ ТЕРРИГЕННОГО НЕФТЯНОГО ПЛАСТА | 2011 |
|
RU2475638C1 |

