Изобретение относится к области железнодорожной автоматики и может быть использовано для определения местоположения подвижных единиц железнодорожного рельсового транспорта.
Известно устройство для определения местоположения рельсового транспортного средства, содержащее подключенный к рельсам на одном конце рельсовой линии блок измерения временного интервала и информационный блок, а на другом конце рельсовой линии к рельсам подключен калибровочный шунт, блок определения занятости участка, соединенный с рельсами на одном конце рельсовой линии, ключевые элементы, подключенные первыми входами к выходу блока измерения временного интервала, блок памяти и блок вычисления координаты транспортного средства, связанный выходом с информационным блоком, одним входом - с выходом одного ключевого элемента, соединенного вторым входом с одним выходом блока определения занятости участка, другой вход которого подключен к второму входу другого ключевого элемента, связанного выходом с входом блока памяти, соединенного выходом с другим входом блока вычисления координаты транспортного средства (SU1162653, B61L 25/02, 23.06.1985).
Недостатками данного устройства являются необходимость формирования и передачи в рельсовую линию дополнительных сигналов и непосредственное подключение аппаратуры к рельсовой линии.
Известно устройство для контроля местоположения подвижного состава, содержащее установленный на локомотиве генератор с передающей антенной, индуктивно связанной с расположенным на пути шлейфом, подключенным через резонансный усилитель к входам амплитудного дискриминатора и формирователя когерентного сигнала, выход которого подключен к одному входу фазового демодулятора, выходом подключенного к индикатору, ключевой элемент, одним входом подключенным к выходу амплитудного дискриминатора, другим - к выходу резонансного усилителя, а выходом - к другому входу фазового демодулятора (SU1219441, B61L 25/02, 23.03.1986).
Недостатками данного устройства являются необходимость формирования и передачи сигналов в дополнительно укладываемый вдоль пути шлейф, а также определение местоположения подвижного состава с точностью до зоны укладки шлейфа.
Известно устройство для определения координаты подвижного объекта, содержащее установленный на подвижном объекте передатчик с индуктивным элементом связи, а на пути - взаимодействующую с упомянутым индуктивным элементом связи трехпроводную индуктивную линию, два провода которой уложены со скрещением и подсоединены к выводу одной из обмоток линейного трансформатора, к среднему выводу которой подключен третий провод через одну из обмоток токового трансформатора, другой конец которой соединен с концами первого и второго проводов, и фазовый приемник, к входам которого подключены другие обмотки линейного и токового трансформаторов, дополнительно устройство снабжено реверсивным счетчиком, элементами И, ИЛИ, НЕ и задержки, D- и JK-триггерами и дополнительными токовым и линейным трансформаторами, фазовым приемником и трехпроводной индуктивной линией, два провода которой уложены с удвоенным шагом скрещения по отношению к первой и подключены к выводам первичной обмотки второго линейного трансформатора, к среднему выводу которой через одну из обмоток второго токового трансформатора подключен третий провод второй индуктивной линии, другой конец которого соединен с концами первого и второго ее проводов, а другие обмотки вторых линейного и токового трансформаторов подключены к входам второго фазового приемника, причем выход первого фазового приемника подключен к счетным входам D-и JК-триггеров и к входу элемента задержки, выход которого подключен к первым входам первого и второго элементов И, вторые входы которых подключены к выходам JK-триггера, выходы - соответственно к входам прямого и обратного счета реверсивного счетчика, а выход второго фазового приемника подключен к установочному входу D-триггера, к входу элемента НЕ и первому входу третьего элемента И, второй вход которого подключен к первому выходу D-триггера, второй выход которого соединен с первым входом четвертого элемента И, второй вход которого подключен к выходу элемента НЕ, а выходы третьего и четвертого элементов И соединены соответственно с входами элемента ИЛИ, выход которого подключен к установочным входам JК-триггера (SU 1252223, B61L 3/20, 23.08.1986).
Недостатками данного устройства являются необходимость формирования и передачи сигналов в дополнительно укладываемую вдоль пути индуктивную линию, а также определение местоположения подвижного состава с точностью до зоны укладки индуктивной линии.
В качестве прототипа принято устройство для определения расстояния до препятствия с локомотива, содержащее установленные на локомотиве и связанные с рельсовыми нитями генератор и приемник, первыми выходами подключенные к одному и другому входу измерителя расстояния, генератор выполнен в виде низкочастотного импульсного генератора, а устройство снабжено установленными на локомотиве перед первой тележкой измерительной колесной парой, колеса которой отделены друг от друга изолированной вставкой, причем первый и второй вход приемника, второй и третий выход низкочастотного импульсного генератора связаны соответственно с одним и другим колесом измерительной колесной пары, а четвертый выход передатчика подключен к запрещающему входу приемника (SU 1137001, B61L 23/18, 30.01.1985).
Недостатком данного устройства является необходимость установки дополнительной измерительной колесной пары, а также формирования и передачи в рельсовую линию дополнительных сигналов.
Технический результат изобретения заключается в повышении точности позиционирования подвижной единицы железнодорожного рельсового транспорта на протяжении всего участка железной дороги.
Технический результат достигается тем, что в устройстве для позиционирования рельсового транспорта, содержащем установленные на подвижной единице железнодорожного рельсового транспорта приемник и измеритель, согласно изобретению измеритель жестко закреплен на оси колесной пары подвижной единицы железнодорожного рельсового транспорта и выполнен в виде бесконтактного измерителя тока с подключенным к нему передатчиком, который по радиоканалу соединен со входом приемника, выход которого подключен ко входу вычислительного блока с подключенным к нему модулем памяти, в котором записана электронная карта маршрута, выход вычислительного блока является выходом устройства.
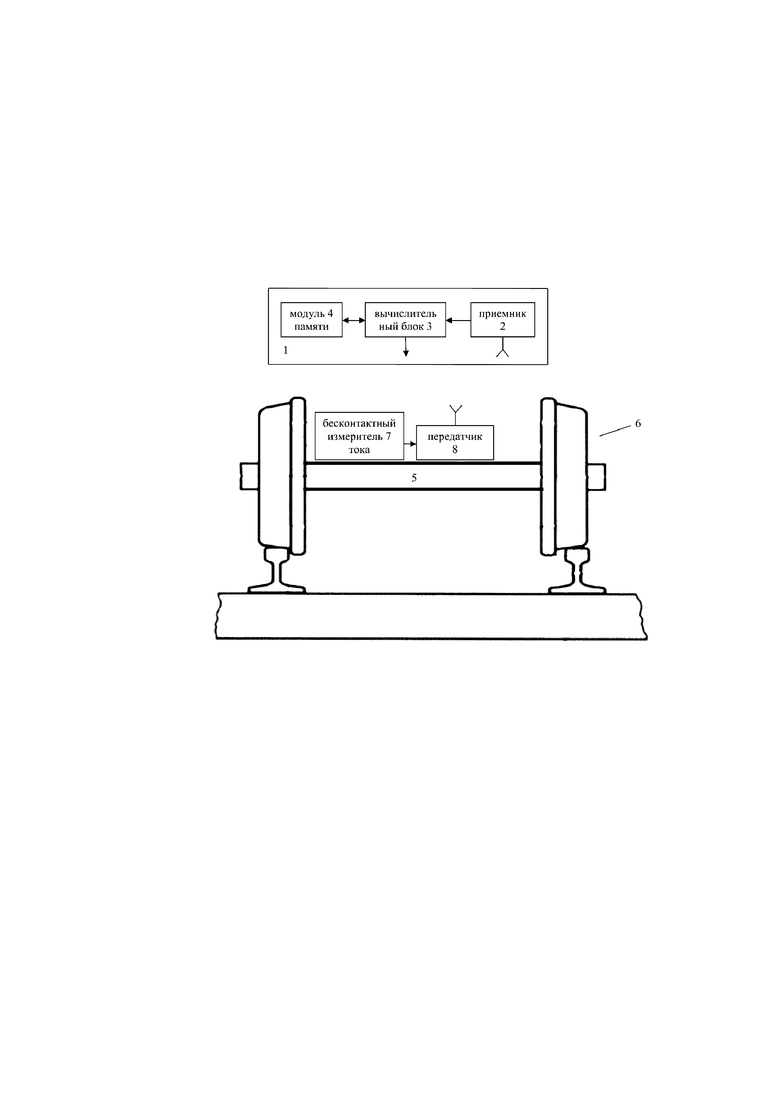
На чертеже приведена функциональная схема устройства для позиционирования рельсового транспорта.
Устройство для позиционирования рельсового транспорта содержит установленные на подвижной единице 1 железнодорожного рельсового транспорта приемник 2, соединенный с вычислительным блоком 3, к которому подключен модуль 4 памяти с записанной в нем электронной картой маршрута, на оси 5 колесной пары 6 подвижной единицы 1 железнодорожного рельсового транспорта жестко закреплены бесконтактный измеритель 7 тока с подключенным к нему передатчиком 8, который по радиоканалу соединен со входом приемника 2, выход вычислительного блока 3 является выходом устройства.
Устройство для позиционирования рельсового транспорта работает следующим образом.
Устройство для позиционирования рельсового транспорта на основе анализа измеренных параметров тока, протекающего по рельсам и колесной паре 6 подвижной единицы 1 железнодорожного рельсового транспорта, позволяет производить вычисление текущей координаты (местоположения) подвижной единицы в пределах участка железной дороги известной длины.
При движении подвижной единицы 1 железнодорожного рельсового транспорта вдоль рельсовой линии по ее колесной паре протекает ток, равный (см. Брылеев А.М. и др. «Устройство и работа рельсовых цепей», М., Транспорт, 1966) [1]:
 , (1)
, (1)
где U – известное выходное напряжение источника тока;
|ZП| – модуль сопротивления передачи тока по рельсовой линии.
Сопротивление передачи тока по рельсовой линии определяется как:
 , (2)
, (2)
где  – известный обратный коэффициент снижения тока в четырехполюснике Н, который является схемой замещения аппаратуры питающего конца рельсовой цепи (см. В.С. Аркатов и др. «Рельсовые цепи магистральных железных дорог», справочник, 3-е изд., М., ООО «Миссия-М», 2006) [2]
– известный обратный коэффициент снижения тока в четырехполюснике Н, который является схемой замещения аппаратуры питающего конца рельсовой цепи (см. В.С. Аркатов и др. «Рельсовые цепи магистральных железных дорог», справочник, 3-е изд., М., ООО «Миссия-М», 2006) [2]
 – известное обратное входное сопротивление четырехполюсника Н,
– известное обратное входное сопротивление четырехполюсника Н,
RШ – известное сопротивление поездного шунта;
А, В, С, D – коэффициенты четырехполюсника, который является схемой замещения рельсовой линии (см. [1]):
 ;
;  ;
;  ;
;
l – длина рельсовой линии;
Zв – известное комплексное волновое сопротивление рельсовой линии;
 – известный комплексный коэффициент распространения тока, определяемый как
– известный комплексный коэффициент распространения тока, определяемый как  ;
;
Zр – удельное сопротивление рельсов (зависит от типа рельсов и типа стыковых соединителей), Zб – удельное сопротивление балласта или изоляции,  – соответственно действительная и мнимая составляющие
– соответственно действительная и мнимая составляющие  .
.
Подставляя в (1) выражения для составляющих формулы (2) и заменив l на х (х – расстояние от колесной пары до конца рельсовой линии известной длины l, расположенной под известным азимутальным углом А относительно местного меридиана и имеющей известные координаты XК,YК конца рельсовой линии в двумерной декартовой системе координат, которые записаны в виде электронной карты в модуле 4 памяти), получим выражение для амплитуды тока I:
 , (3)
, (3)
где  ;
;  ;
;
АН, ВН – известные коэффициенты четырехполюсника Н (см. [2]).
Информация о пути (длина рельсовой линии (блок-участка), координаты ее конца и азимутальный угол наклона рельсового пути), размещенная в виде электронной карты в модуле 4 памяти, перед началом движения считывается из приборов безопасности рельсового транспорта по беспроводному каналу связи, либо скачивается через съемный носитель. Вычислительный блок 3 обращается к модулю 4 памяти для получения необходимых данных об азимутальном угле А, длине рельсовой линии и координатах XК,YК ее конца.
Учитывая комплексный характер K1, K2 и γ, запишем выражение (3) как
 . (4)
. (4)
В этом случае амплитуда тока, протекающего по оси колесной пары, равна:
или
Амплитуда I тока, протекающего по оси 5 колесной пары 6, измеряется бесконтактным измерителем 7 тока, жестко закрепленным на данной оси 5. Выходной сигнал бесконтактного измерителя 7 тока, соответствующий измеренной амплитуде, поступает на вход передатчика 8, выходной сигнал которого по радиоканалу поступает на вход приемника 2. С выхода приемника 2 сигнал YI, соответствующий амплитуде I (5), поступает на вход вычислительного блока 3, где относительно переменной х решается нелинейное уравнение:

с использованием известных итеративных методов (например, после предварительного умножения YI на знаменатель выражения (5) с последующим возведением в квадрат и использованием метода Ньютона-Рафсона:

Так как начальное значение х известно точно – х=l, то данный алгоритм сходится за 2-4 шага, что обеспечивает определение координаты х практически в реальном времени). После определения значения х в вычислительном блоке 3 рассчитываются текущие проекции расстояния колесной пары от конца рельсовой линии на оси двумерной декартовой системы координат:
хt=x sinA, yt= xcosA,
sinA, yt= xcosA,
и окончательно – текущие координаты колесной пары подвижной единицы железнодорожного рельсового транспорта в двумерной декартовой системе координат:
Хt= XК - xsinA, Yt= YК - xcosA,
которые поступают далее на выход вычислительного блока 3, который является выходом устройства. При прохождении колесной парой конца рельсовой линии, определяемого по измеренному значению известной амплитуды тока, текущие координаты полагаются равными Хt=XК, Yt=YК, что обнуляет возможные ошибки определения текущих координат колесной пары в конце каждой рельсовой линии и наряду с приведенным выше определением ее текущих координат обеспечивает высокоточное позиционирование подвижной единицы железнодорожного рельсового транспорта.
Таким образом, предлагаемое изобретение обеспечивает повышенную точность позиционирования подвижной единицы железнодорожного рельсового транспорта на протяжении всего участка железной дороги без формирования и передачи в рельсовую линию дополнительных сигналов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для позиционирования рельсового транспорта | 2022 |
|
RU2786255C1 |
| СИСТЕМА МОНИТОРИНГА ЛОЖНОЙ СВОБОДНОСТИ РЕЛЬСОВОЙ ЦЕПИ И СОПРОТИВЛЕНИЯ ПОЕЗДНОГО ШУНТА ДВУОСНЫХ ПОДВИЖНЫХ ЕДИНИЦ | 2020 |
|
RU2747077C1 |
| РАЗВЕТВЛЕННАЯ КАБЕЛЬНАЯ ПЕТЛЕВАЯ РЕЛЬСОВАЯ ЦЕПЬ ДЛЯ ОГРАЖДЕНИЯ БЛОК-УЧАСТКОВ РАЗВЕТВЛЕННЫХ РЕЛЬСОВЫХ ПУТЕЙ В СИСТЕМАХ ЦЕНТРАЛИЗАЦИИ И АВТОБЛОКИРОВКИ АВТОМАТИКИ И ТЕЛЕМЕХАНИКИ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2007 |
|
RU2340498C1 |
| РЕЛЬСОВАЯ ЦЕПЬ ДЛЯ КОНТРОЛЯ ЗАНЯТОСТИ БЛОК-УЧАСТКА И КАБЕЛЬНЫЙ ПЕТЛЕВОЙ ДАТЧИК КОНТРОЛЯ ПРОХОДА КОЛЕСНЫХ ПАР И ЕДИНИЦ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 2007 |
|
RU2340497C2 |
| Измеритель модуля скорости | 2018 |
|
RU2696970C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ДЛЯ ДИАГНОСТИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2010 |
|
RU2442713C1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ РЕЛЬСОВЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ И ОПРЕДЕЛЕНИЯ ЕГО ПОЗИЦИИ НА РЕЛЬСОВОМ ПУТИ | 2009 |
|
RU2409492C1 |
| Способ измерения расстояния до колесной пары железнодорожного подвижного состава и устройство для его осуществления | 2023 |
|
RU2824227C1 |
| Устройство для измерения модуля скорости рельсового транспорта | 2020 |
|
RU2737869C1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ РЕЛЬСОВЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ И ДЛЯ ОПРЕДЕЛЕНИЯ ЕГО ПОЗИЦИИ НА РЕЛЬСОВОМ ПУТИ | 2013 |
|
RU2538498C1 |
Изобретение относится к средствам определения местоположения подвижных единиц рельсового транспорта. Устройство содержит установленные на подвижной единице железнодорожного рельсового транспорта приемник, соединенный с вычислительным блоком, к которому подключен модуль памяти с записанной в нем электронной картой маршрута, на оси колесной пары подвижной единицы железнодорожного рельсового транспорта жестко закреплены бесконтактный измеритель тока с подключенным к нему передатчиком, который по радиоканалу соединен со входом приемника, выход вычислительного блока является выходом устройства. Позиционирование осуществляют на основе анализа измеренных параметров тока, протекающего по рельсам и колесной паре подвижной единицы, с вычислением текущей координаты местоположения подвижной единицы в пределах участка железной дороги известной длины. Достигается повышение точности позиционирования на протяжении всего участка железной дороги без формирования и передачи в рельсовую линию дополнительных сигналов. 1 ил.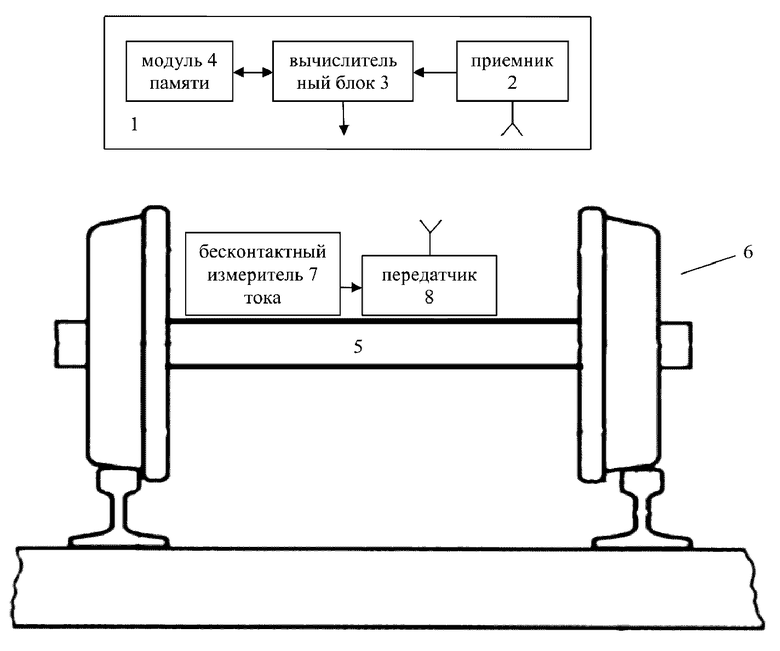
Устройство для позиционирования рельсового транспорта, содержащее установленные на подвижной единице железнодорожного рельсового транспорта приемник и измеритель, отличающееся тем, что измеритель жестко закреплен на оси колесной пары подвижной единицы железнодорожного рельсового транспорта и выполнен в виде бесконтактного измерителя тока с подключенным к нему передатчиком, который по радиоканалу соединен со входом приемника, выход которого подключен ко входу вычислительного блока с подключенным к нему модулем памяти, в котором записана электронная карта маршрута, а выход вычислительного блока является выходом устройства.
| УСТРОЙСТВО КОРРЕКТИРОВКИ ЛИНЕЙНОЙ КООРДИНАТЫ НАХОЖДЕНИЯ ПОЕЗДА | 2005 |
|
RU2290335C1 |
| УСТРОЙСТВО КОРРЕКТИРОВКИ ЛИНЕЙНОЙ КООРДИНАТЫ НАХОЖДЕНИЯ ПОЕЗДА | 2003 |
|
RU2248291C2 |
| Устройство для определения расстояния до препятствия от локомотива | 1982 |
|
SU1137001A1 |
| СПОСОБ УПРАВЛЕНИЯ ЗАКРЫТИЕМ ЖЕЛЕЗНОДОРОЖНОГО ПЕРЕЕЗДА | 2015 |
|
RU2610903C1 |

