Область техники
Настоящее изобретение относится к технической области наблюдения за устройством в обрабатывающей промышленности и, в частности, относится к способу и средству для наблюдения состояния устройства в обрабатывающей промышленности и компьютерному носителю хранения информации.
Уровень техники
Техническое обслуживание оборудования является наиболее важным в обрабатывающей промышленности. Неправильное техническое обслуживание оборудования и какая-либо поломка оборудования приводят к низкой производительности и высокому риску для безопасности и, следовательно, не должны происходить в обрабатывающей промышленности.
После формирования, изделие трудно возвращать в исходное состояние в обрабатывающей промышленности. Т.е. изделие не может быть разобрано после сборки. Физические или химические способы, такие как смешивание, разделение, распыление и нагрев, главным образом, используются для сырьевых материалов в обрабатывающей промышленности, чтобы повышать ценность сырьевых материалов. Типичные обрабатывающие отрасли включают в себя фармацевтическую промышленность, химическую промышленность, нефтехимическую промышленность, электроэнергетику, сталелитейную промышленность, производство энергии, цементную промышленность, пищевую промышленность, производство напитков и т.д. Предприятия в обрабатывающих отраслях, главным образом, применяют способы работы на склад, производство партиями и непрерывное производство.
Оборудование предприятия в обрабатывающих отраслях представляет собой стационарную производственную линию с большими инвестициями и фиксированным технологическим потоком. Оборудование имеет ограниченную производственную мощность. Техническое обслуживание оборудования на производственной линии является особенно важным, и поломка не допускается. Отказ оборудования в обрабатывающих отраслях промышленности приведет к вынужденной остановке производственного процесса, который подразумевает множество химических реакций, и большая часть промежуточных продуктов, получившихся из незавершенных реакций, вызванных прекращением производства, будет выброшена в качестве отбракованных материалов. Понесенные потери сырьевых материалов и энергии являются огромными. Кроме того, в большинстве случаев, оборудование должно быть перезапущено после остановки производства, и стабилизация оборудования займет некоторое время, и на производительность и безопасность будет оказываться влияние. Следовательно, необходимо наблюдать в режиме онлайн за состоянием оборудования для того, чтобы уменьшать незапланированные остановки, обнаруживая проблему "со здоровьем" оборудования как можно раньше.
Однако очень трудно определять состояние работоспособности онлайн-оборудования или получать фиксированные правила для наблюдения состояния жизненного цикла оборудования, особенно в обрабатывающей промышленности, где затрагиваются сложные и очень чувствительные взаимозависимости между большим числом переменных, вследствие недостатка точного определения границы между нормальными и ненормальными состояниями оборудования.
Большинство производителей все еще выполняют плановые регламентные работы по техническому обслуживанию, и в этом случае, оборудование работает до запланированного времени технического обслуживания. Эта политика не является политикой реального времени и очень зависит от опыта. В результате избыток технических обслуживаний вызывается вследствие того, что имеется тенденция выбирать время технического обслуживания, прежде чем какой-либо потенциальный отказ или недостаток технических обслуживаний будет вызван, так как почти невозможно предусматривать все различные режимы отказов заранее.
Сущность изобретения
Ввиду этого одной целью настоящего изобретения является предоставление способа для наблюдения за состоянием устройства в обрабатывающей промышленности, чтобы осуществлять онлайн-наблюдение за состоянием устройства в обрабатывающей промышленности;
другой целью настоящего изобретения является предоставление средства для наблюдения за состоянием устройства в обрабатывающей промышленности, чтобы осуществлять онлайн-наблюдение за состоянием устройства в обрабатывающей промышленности;
дополнительной целью настоящего изобретения является предоставление компьютерного носителя хранения информации, чтобы осуществлять онлайн-наблюдение за состоянием устройства в обрабатывающей промышленности.
Чтобы достигать вышеупомянутых целей, следующие технические решения предоставляются в настоящем изобретении:
Способ наблюдения за состоянием устройства в обрабатывающей промышленности содержит:
сбор и сохранение данных многомерных состояний устройства в обрабатывающей промышленности;
применение предварительно заданного алгоритма корреляционного анализа для выполнения корреляционного анализа собранных хронологических данных многомерных состояний устройства, чтобы получать коррелированные измерения состояния;
получение хронологических данных коррелированных размерных состояний согласно полученным коррелированным измерениям состояния и применение предварительно заданного алгоритма для установления эталонной модели состояния устройства, чтобы моделировать полученные хронологические данные коррелированных размерных состояний для получения эталонной модели состояния устройства;
получение данных реального времени для соответствующих коррелированных размерных состояний эталонной модели состояния устройства в реальном времени и определение того, является ли текущее состояние устройства нормальным, согласно предварительно заданному условию определения состояния устройства, данным реального времени коррелированных размерных состояний и эталонной модели состояния устройства.
Этап сбора и сохранения данных многомерных состояний устройства в обрабатывающей промышленности содержит:
сбор данных многомерных состояний устройства в обрабатывающей промышленности из одной или какого-либо сочетания системы получения производственных данных, системы диспетчерского управления и получения данных и системы моделирования и сохранение данных,
или сбор данных многомерных состояний устройства в обрабатывающей промышленности из одной или какого-либо сочетания системы получения производственных данных, системы диспетчерского управления и получения данных и системы моделирования, и системы проектирования устройства и сохранение данных.
После получения коррелированных измерений состояния способ дополнительно содержит:
вывод полученных коррелированных измерений состояния пользователю, и если принимается модифицирующая информация, введенная пользователем относительно коррелированных измерений состояния, модификацию коррелированных измерений состояния согласно модифицирующей информации.
После получения эталонной модели состояния устройства способ дополнительно содержит:
вывод полученной эталонной модели состояния устройства пользователю, и если принимается модифицированная информация, введенная пользователем относительно эталонной модели состояния устройства, модификацию эталонной модели состояния устройства согласно модифицирующей информации.
Алгоритм корреляционного анализа является алгоритмом корреляции Пирсона и/или алгоритмом корреляции Кендалла, а алгоритм для установления эталонной модели состояния устройства является алгоритмом процесса Дирихле, основанным на модели смеси нормальных распределений.
Средство для наблюдения за состоянием устройства в обрабатывающей промышленности содержит:
модуль получения данных, собирающий и сохраняющий данные многомерных состояний устройства в обрабатывающей промышленности,
модуль корреляционного вычисления, применяющий предварительно заданный алгоритм корреляционного анализа для выполнения корреляционного анализа хронологических данных, собранных посредством модуля получения данных многомерных состояний устройства, чтобы получать коррелированные измерения состояния,
модуль установления эталонной модели состояния, получающий хронологические данные коррелированных размерных состояний от модуля получения данных согласно коррелированным измерениям состояния, полученным посредством модуля корреляционного вычисления, и применяющий предварительно заданный алгоритм для установления эталонной модели состояния устройства, чтобы моделировать полученные хронологические данные коррелированных размерных состояний для получения эталонной модели состояния устройства, и
модуль онлайн-наблюдения, получающий данные реального времени для соответствующих коррелированных размерных состояний эталонной модели состояния устройства в реальном времени от модуля получения согласно эталонной модели состояния устройства, установленной посредством модуля установления эталонной модели состояния, и определяющий, является ли текущее состояние устройства нормальным, согласно предварительно заданному условию определения состояния устройства, данным реального времени коррелированных размерных состояний и эталонной модели состояния устройства.
Модуль получения данных, собирающий и сохраняющий данные многомерных состояний устройства в обрабатывающей промышленности, в частности, используется, чтобы
собирать данные многомерных состояний устройства в обрабатывающей промышленности из одной или какого-либо сочетания системы получения производственных данных, системы диспетчерского управления и получения данных и системы моделирования и сохранять данные,
или собирать данные многомерных состояний устройства в обрабатывающей промышленности из одной или какого-либо сочетания системы получения производственных данных, системы диспетчерского управления и получения данных и системы моделирования, и системы проектирования устройства и сохранять данные.
Средство дополнительно содержит модуль человеко-машинного взаимодействия, и
модуль корреляционного вычисления дополнительно используется, чтобы выводить полученные коррелированные измерения состояния пользователю через модуль человеко-машинного взаимодействия, и если принимается модифицирующая информация, введенная пользователем относительно коррелированных измерений состояния, от модуля человеко-машинного взаимодействия, модифицировать коррелированные измерения состояния согласно модифицирующей информации.
Средство дополнительно содержит модуль человеко-машинного взаимодействия, и
модуль установления эталона состояния дополнительно используется, чтобы выводить полученную эталонную модель состояния устройства пользователю через модуль человеко-машинного взаимодействия, и если принимается модифицирующая информация, введенная пользователем относительно эталонной модели состояния устройства, от модуля человеко-машинного взаимодействия, модифицировать эталонную модель состояния устройства согласно модифицирующей информации.
Компьютерно-читаемый носитель хранения информации хранит компьютерную программу, и компьютерная программа выполняет этапы вышеупомянутого способа для наблюдения состояния устройства в обрабатывающей промышленности, когда исполняется процессором.
Средство для наблюдения состояния устройства в обрабатывающей промышленности содержит процессор и память, и приложения, которые могут исполняться процессором, чтобы предоставлять возможность процессору выполнять этапы вышеупомянутого способа для наблюдения состояния устройства в обрабатывающей промышленности, хранятся в памяти.
Из вышеупомянутых технических решений может быть видно, что в настоящем изобретении коррелированные измерения состояния получаются посредством выполнения корреляционного анализа хронологических данных многомерных состояний устройства, затем эталонная модель состояния устройства устанавливается с помощью хронологических данных коррелированных размерных состояний, и, наконец, эталонная модель состояния устройства используется для определения данных реального времени коррелированных размерных состояний, чтобы определять, является ли состояние устройства нормальным, таким образом, осуществляя онлайн-наблюдение состояния устройства.
Краткое описание чертежей
Последующее подробное описание в сочетании с чертежами сделает более очевидными другие характеристики, отличительные признаки и преимущества настоящего изобретения.
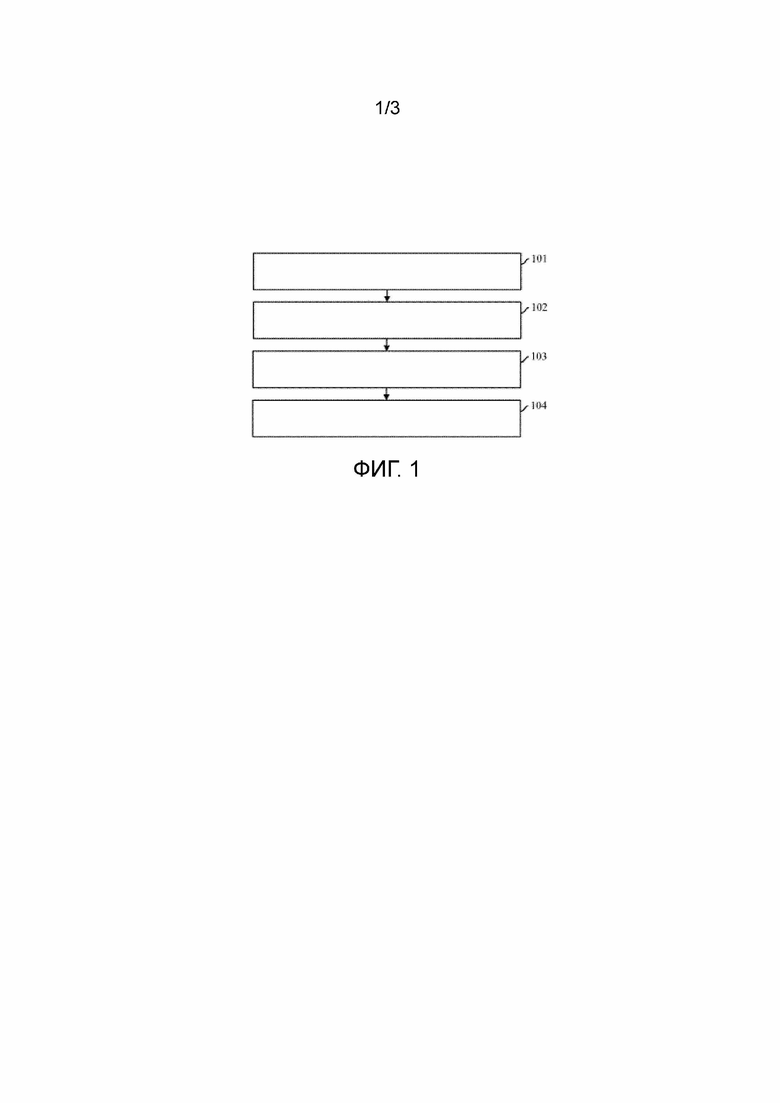
Фиг. 1 - это блок-схема последовательности операций способа для наблюдения состояния устройства в обрабатывающей промышленности в одном варианте осуществления настоящего изобретения.
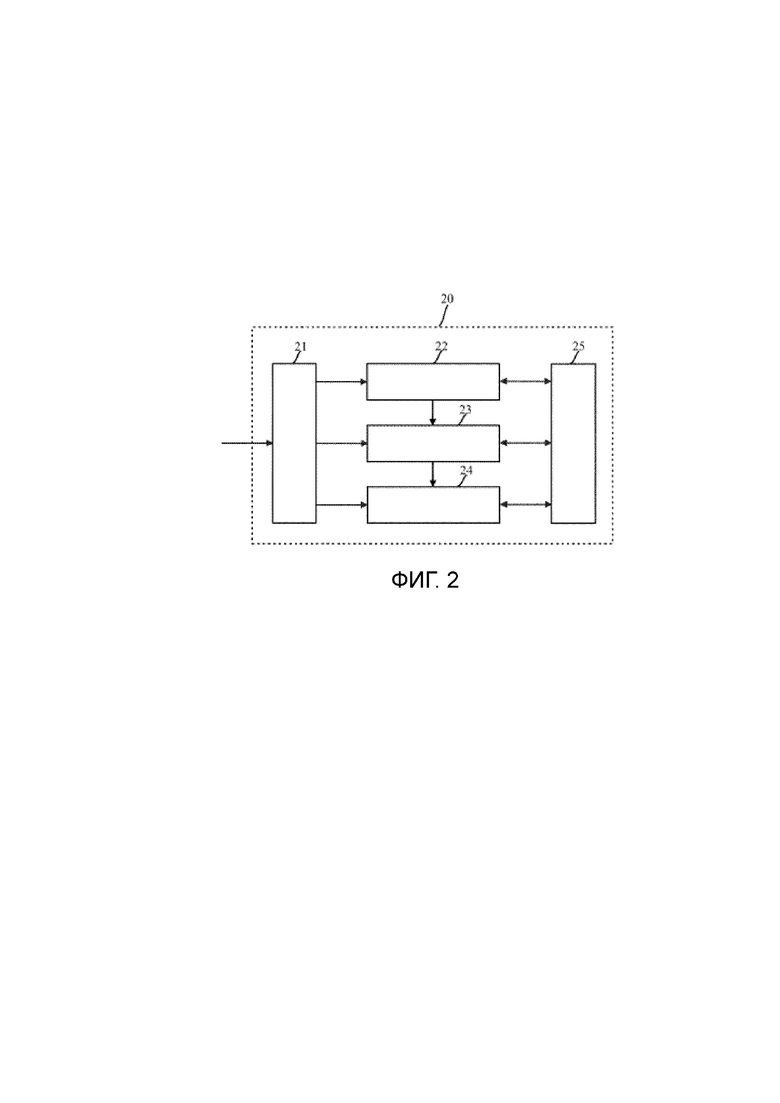
Фиг. 2 показывает структуру средства для наблюдения состояния устройства в обрабатывающей промышленности в одном варианте осуществления настоящего изобретения.
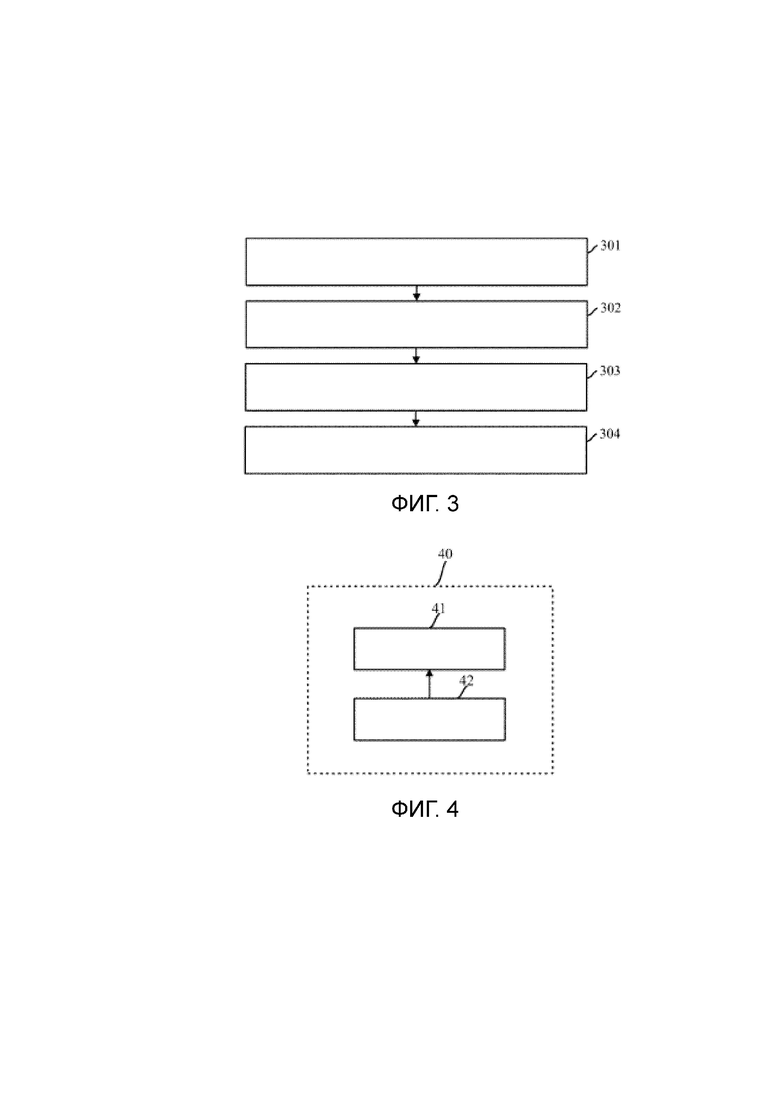
Фиг. 3 - это блок-схема последовательности операций способа, исполняемого посредством средством по фиг. 2 для наблюдения состояния устройства в обрабатывающей промышленности в вариантах осуществления настоящего изобретения.
Фиг. 4 показывает структуру оборудования для наблюдения состояния устройства в обрабатывающей промышленности в другом варианте осуществления настоящего изобретения.
Описание ссылочных номеров на чертежах:
Подробное описание изобретения
Чтобы сделать более ясными цели, технические решения и преимущества настоящего изобретения, последующее дополнительно описывает подробно настоящее изобретение в сочетании с чертежами и вариантами осуществления.
"Один" или «упомянутый» в единственной форме в описании или формуле настоящего изобретения также подразумевает множественную форму, пока иное явно не указано в документе.
Способ для наблюдения состояния устройства в обрабатывающей промышленности, предоставляемый настоящим изобретением, содержит: сбор и сохранение данных многомерных состояний устройства в обрабатывающей промышленности; применение предварительно заданного алгоритма корреляционного анализа для выполнения корреляционного анализа собранных хронологических данных многомерных состояний устройства, чтобы получать коррелированные измерения состояния; получение хронологических данных коррелированных размерных состояний согласно полученным коррелированным измерениям состояния и применение предварительно заданного алгоритма для установления эталонной модели состояния устройства, чтобы моделировать полученные хронологические данные коррелированных размерных состояний для получения эталонной модели состояния устройства; получение данных реального времени соответствующих коррелированных размерных состояний эталонной модели состояния устройства в реальном времени и определение того, является ли текущее состояние устройства нормальным, согласно предварительно заданному условию определения состояния устройства,
данным реального времени коррелированных размерных состояний и эталонной модели состояния устройства.
Этап сбора и сохранения данных многомерных состояний устройства в обрабатывающей промышленности может содержать сбор данных многомерных состояний устройства в обрабатывающей промышленности из одной или какого-либо сочетания системы получения производственных данных, системы диспетчерского управления и получения данных и системы моделирования и сохранение данных, или сбор данных многомерных состояний устройства в обрабатывающей промышленности из одной или какого-либо сочетания системы получения производственных данных, системы диспетчерского управления и получения данных и системы моделирования, и системы проектирования устройства и сохранение данных.
Для того чтобы получать более точный результат коррелированных измерений состояния после получения коррелированных измерений состояния, способ дополнительно содержит вывод полученных коррелированных измерений состояния пользователю, и если принимается модифицирующая информация, введенная пользователем относительно коррелированных измерений состояния, модификацию коррелированных размеров состояния согласно модифицирующей информации.
Для того, чтобы получать более точную эталонную модель состояния устройства, после получения эталонной модели состояния устройства, способ дополнительно содержит вывод полученной эталонной модели состояния устройства пользователю, и если принимается модифицирующая информация, вводимая пользователем относительно эталонной модели состояния устройства, модификацию эталонной модели состояния устройства согласно модифицирующей информации.
При этом алгоритм корреляционного анализа может быть алгоритмом корреляции Пирсона и/или алгоритмом корреляции Кендалла, а алгоритм для установления эталонной модели состояния устройства может быть алгоритмом процесса Дирихле, основанным на модели смеси нормальных распределений.
Средство для наблюдения состояния устройства в обрабатывающей промышленности, предоставляемое настоящим изобретением, содержит: модуль получения данных, собирающий и сохраняющий данные многомерных состояний устройства в обрабатывающей промышленности, модуль корреляционного вычисления, применяющий предварительно заданный алгоритм корреляционного анализа для выполнения корреляционного анализа хронологических данных, собранных посредством модуля получения данных многомерных состояний устройства, чтобы получать коррелированные измерения состояния, модуль установления эталонной модели состояния, получающий хронологические данные коррелированных размерных состояний от модуля получения данных согласно коррелированным измерениям состояния, полученным посредством модуля корреляционного вычисления, и применяющий предварительно заданный алгоритм для установления эталонной модели состояния устройства, чтобы моделировать полученные хронологические данные коррелированных размерных состояний для получения эталонной модели состояния устройства, и модуль онлайн-наблюдения, получающий данные реального времени для соответствующих коррелированных размерных состояний эталонной модели состояния устройства в реальном времени от модуля получения данных согласно эталонной модели состояния устройства, установленной посредством модуля установления эталонной модели состояния, и определяющий то, является ли текущее состояние устройства нормальным, согласно предварительно заданному условию определения состояния устройства, данным реального времени коррелированных размерных состояний и эталонной модели состояния устройства.
При этом модуль получения данных, собирающий и сохраняющий данные многомерных состояний устройства в обрабатывающей промышленности, в частности, используется для сбора данных многомерных состояний устройства в обрабатывающей промышленности из одной или какого-либо сочетания системы получения производственных данных, системы диспетчерского управления и получения данных и системы моделирования и сохранения данных, или сбора данных многомерных состояний устройства в обрабатывающей промышленности из одной или какого-либо сочетания системы получения производственных данных, системы диспетчерского управления и получения данных и системы моделирования, и системы проектирования устройства и сохранения данных.
Средство дополнительно содержит модуль человеко-машинного взаимодействия, и модуль корреляционного вычисления дополнительно используется для вывода полученных коррелированных измерений состояния пользователю посредством модуля человеко-машинного взаимодействия, и если принимается модифицирующая информация, введенная пользователем относительно коррелированных измерений состояния, от модуля человеко-машинного взаимодействия, модификации коррелированных измерений состояния согласно модифицирующей информации.
Средство дополнительно содержит модуль человеко-машинного взаимодействия, и модуль установления эталона состояния дополнительно используется, чтобы выводить полученную эталонную модель состояния устройства пользователю через модуль человеко-машинного взаимодействия, и если принимается модифицирующая информация, введенная пользователем относительно эталонной модели состояния устройства, от модуля человеко-машинного взаимодействия, модифицировать эталонную модель состояния устройства согласно модифицирующей информации.
Компьютерно-читаемый носитель хранения информации, предоставленный настоящим изобретением, хранит компьютерную программу, и компьютерная программа выполняет этапы вышеупомянутого способа для наблюдения состояния устройства в обрабатывающей промышленности, когда исполняется процессором.
Другое устройство для наблюдения состояния устройства в обрабатывающей промышленности содержит процессор и память, и приложения, которые могут исполняться процессором, чтобы предоставлять возможность процессору выполнять этапы вышеупомянутого способа для наблюдения состояния устройства в обрабатывающей промышленности, хранятся в памяти.
Настоящее изобретение описывается подробно ниже.
Фиг. 1 - это блок-схема способа для наблюдения состояния устройства в обрабатывающей промышленности в одном варианте осуществления настоящего изобретения, и конкретные этапы являются следующими:
Этап 101: Сбор и сохранение данных многомерных состояний устройства в обрабатывающей промышленности.
В частности, данные многомерных состояний устройства в обрабатывающей промышленности могут быть собраны из одной или какого-либо сочетания системы получения производственных данных, системы диспетчерского управления и получения данных и системы моделирования и могут быть сохранены, или данные многомерных состояний устройства в обрабатывающей промышленности могут быть собраны из одной или какого-либо сочетания системы получения производственных данных, системы диспетчерского управления и получения данных и системы моделирования, и системы проектирования устройства и могут быть сохранены.
Здесь, данные каждого размерного состояния соответствуют потоку данных временной последовательности для описания состояния устройства. Например, если n датчиков (например, температурный датчик, вибрационный датчик, датчик давления и т.д.) развернуто на устройстве для обнаружения множества состояний множества компонентов устройства, данные n размерных состояний устройства будут собраны.
Этап 102: Применение предварительно заданного алгоритма корреляционного анализа для выполнения корреляционного анализа собранных хронологических данных многомерных состояний устройства, чтобы получать коррелированные измерения состояния.
Алгоритм корреляционного анализа является, например, алгоритмом корреляции Пирсона или алгоритмом корреляции Кендалла.
Например, собираются данные n размерных состояний устройства, узнается, что данные m (m≤n) размерных состояний коррелируют после корреляционного анализа, и размерными значениями m размерных состояний являются 1, 3, 4, 8…, соответственно.
В практических применениях, одно из размерных состояний может быть использовано в качестве целевого состояния, и затем алгоритм корреляционного анализа используется, чтобы анализировать, какие размерные состояния коррелируют с целевым состоянием.
Этап 103: Получение хронологических данных коррелированных размерных состояний согласно полученным коррелированным измерениям состояния и применение предварительно заданного алгоритма для установления эталонной модели состояния устройства, чтобы моделировать полученные хронологические данные коррелированных размерных состояний для получения эталонной модели состояния устройства.
Алгоритм для установления эталонной модели состояния устройства является, например, алгоритмом процесса Дирихле, основанным на модели смеси нормальных распределений.
Например, если выясняется из анализа с помощью алгоритма корреляционного анализа, что множество измерений состояния, коррелирующих с целевым измерением состояния (например, измерением p состояния), являются измерения q, u и v, соответственно, тогда выполняется попытка устанавливать соответствие, когда устанавливается эталонная модель состояния устройства. В соответствии, хронологические данные измерений q, u и v состояния используются в качестве входных параметров, а хронологические данные измерения p состояния используются в качестве выходного параметра. Соответствие является эталонной моделью состояния устройства, т.е. эталонная модель состояния устройства изображает соотношение между измерением p состояния и измерениями q, u и v состояния.
Эталонная модель состояния устройства может быть установлена для каждого целевого измерения состояния из различных целевых измерений состояния устройства.
Этап 104: Получение данных реального времени соответствующих коррелированных размерных состояний эталонной модели состояния устройства в реальном времени согласно эталонной модели состояния устройства и определение того, является ли текущее состояние устройства нормальным, согласно предварительно заданному условию определения состояния устройства, данным реального времени коррелированных размерных состояний и эталонной модели состояния устройства.
Например, данные реального времени для измерений p, q, u и v состояния получается в реальном времени согласно эталонной модели состояния устройства, установленной, чтобы изображать соотношение между измерением p состояния и измерениями q, u и v состояния, затем данные реального времени для измерений q, u и v состояния вводятся в эталонную модель состояния устройства для вычислений, чтобы получать ожидаемое значение данных измерения p состояния, разница между ожидаемым значением данных для измерения p состояния и полученным в реальном времени фактическим значением данных для измерения p состояния вычисляется, определяется, меньше ли разница по сравнению с предварительно заданным пороговым значением, если да, состояние измерения p считается нормальным, а иначе, состояние измерения p считается ненормальным.
Условие определения состояния устройства может быть: если разница между ожидаемым значением данных целевого состояния устройства, полученным посредством вычислений согласно эталонной модели состояния устройства, и фактическим значением данных целевого состояния устройства меньше предварительно заданного порогового значения, целевое состояние устройства считается нормальным, а иначе, целевое состояние устройства считается ненормальным. Конкретное условие определения состояния устройства может быть задано пользователем согласно сценарию применения.
В частности, после того как текущее состояние устройства определяется как нормальное или ненормальное, определенное текущее состояние устройства может быть выведено пользователю, и пользователь может модифицировать текущее состояние устройства согласно опыту. Если пользователь модифицирует текущее состояние устройства согласно опыту, соответствующая эталонная модель состояния устройства может считаться неточной, и данные реального времени, полученные на этапе 104, для соответствующих коррелированных размерных состояний эталонной модели состояния устройства используются в качестве хронологических данных, чтобы повторно устанавливать эталонную модель состояния устройства.
Фиг. 2 показывает структуру средства 20 для наблюдения состояния устройства в обрабатывающей промышленности в одном варианте осуществления настоящего изобретения, и средство 20 содержит модуль 21 получения данных, модуль 22 корреляционного вычисления, модуль 23 установления эталонной модели состояния, модуль 24 онлайн-наблюдения и модуль 25 человеко-машинного взаимодействия.
Модуль 21 получения данных собирает и сохраняет данные многомерных состояний устройства в обрабатывающей промышленности.
В практических применениях модуль 21 получения данных может собирать данные многомерных состояний устройства в обрабатывающей промышленности из одной или какого-либо сочетания системы получения производственных данных, системы диспетчерского управления и получения данных и системы моделирования и сохранять данные, или собирать данные многомерных состояний устройства в обрабатывающей промышленности из одной или какого-либо сочетания системы получения производственных данных, системы диспетчерского управления и получения данных и системы моделирования, и системы проектирования устройства и сохранять данные.
Модуль 22 корреляционного вычисления применяет предварительно заданный алгоритм корреляционного анализа для выполнения корреляционного анализа хронологических данных, собранных посредством модуля 21 получения данных многомерных состояний устройства, чтобы получать коррелированные измерения состояния.
В практических применениях, средство 20 может дополнительно содержать модуль 25 человеко-машинного взаимодействия, и модуль 22 корреляционного вычисления дополнительно используется, чтобы выводить полученные коррелированные измерения состояния пользователю через модуль 25 человеко-машинного взаимодействия, после чего, если принимается модифицирующая информация, введенная пользователем относительно коррелированных измерений состояния, модуль 25 человеко-машинного взаимодействия отправляет модифицирующую информацию модулю 22 корреляционного вычисления, и модуль 22 корреляционного вычисления модифицирует коррелированные измерения состояния согласно модифицированной информации.
Модуль 23 установления эталонной модели состояния получает хронологические данные для коррелированных размерных состояний от модуля 21 получения данных согласно коррелированным измерениям состояния, полученным посредством модуля 22 корреляционного вычисления, и использует предварительно заданный алгоритм для установления эталонной модели состояния устройства, чтобы моделировать полученные хронологические данные коррелированных размерных состояний для получения эталонной модели состояния устройства.
В практических применениях, средство 20 может дополнительно содержать модуль 25 человеко-машинного взаимодействия, и модуль 23 установления эталонной модели состояния дополнительно используется, чтобы выводить полученную эталонную модель состояния устройства пользователю через модуль 25 человеко-машинного взаимодействия, после чего, если принимается модифицирующая информация, введенная пользователем относительно эталонной модели состояния устройства, модуль 25 человеко-машинного взаимодействия отправляет модифицирующую информацию модулю 23 установления эталонной модели состояния, и модуль 23 установления эталонной модели состояния модифицирует эталонную модель состояния устройства согласно модифицирующей информации.
Модуль 24 онлайн-наблюдения получает данные реального времени для соответствующих коррелированных размерных состояний эталонной модели состояния устройства в реальном времени от модуля 21 получения согласно эталонной модели состояния устройства, установленной посредством модуля 23 установления эталонной модели состояния, и определяет, является ли текущее состояние устройства нормальным, согласно предварительно заданному условию определения состояния устройства, данным реального времени коррелированных размерных состояний и эталонной модели состояния устройства.
Фиг. 3 - это блок-схема последовательности операций способа, исполняемого посредством средства 20 на фиг. 2 для наблюдения состояния устройства в обрабатывающей промышленности в вариантах осуществления настоящего изобретения, и конкретные этапы являются следующими:
Этап 301: Модуль 21 получения данных периодически собирает и сохраняет данные многомерных состояний устройства в обрабатывающей промышленности.
В частности, модуль 21 получения данных может собирать данные многомерных состояний устройства в обрабатывающей промышленности от следующих систем:
1. Система получения производственных данных, например, распределенная система управления (DCS).
Система получения производственных данных собирает данные многомерных состояний устройства от различных датчиков и/или различных измерительных инструментов на устройстве в реальном времени, а затем должна лишь отправлять собранные данные многомерных состояний устройства модулю 21 получения данных в реальном времени, при этом поток данных временной последовательности, собранных от каждого датчика или измерительного инструмента, используется в качестве данных размерного состояния.
Например, для DCS в нефтехимической отрасли, собранные данные многомерных состояний устройства могут содержать:
(11) Данные о температуре, собранные от температурных датчиков на устройстве, при этом конкретная DCS должна регистрировать время сбора, идентификаторы(ID)/номера температурных датчиков и соответствующие значения температуры
(12) Данные о вибрации, собранные от вибрационных датчиков на устройстве, при этом конкретная DCS должна регистрировать время сбора, ID/номера вибрационных датчиков и соответствующие значения вибрации (например, флаги, указывающие, возникает ли вибрация)
(13) Значения давления, собранные от датчиков давления на устройстве, при этом конкретная DCS должна регистрировать время сбора, ID/номера датчиков давления и соответствующие значения давления
(14) Значения открытия клапанов, собранные от датчиков открытия клапанов на устройстве, при этом конкретная DCS должна регистрировать время сбора, ID/номера датчиков открытия клапанов и соответствующие значения открытия клапанов.
2. Система диспетчерского управления и сбора данных (SCADA). Система SCADA собирает данные многомерных состояний устройства от различных датчиков и/или различных измерительных инструментов на устройстве в реальном времени, и затем должна лишь отправлять собранные данные многомерных состояний устройства модулю 21 получения данных в реальном времени. Например, для системы SCADA в отрасли гидроэнергетики, собранные данные многомерных состояний устройства могут содержать:
(21) Значения тока, собранные от амперметров на устройстве, при этом конкретная система SCADA должна регистрировать время сбора, ID/номера амперметров и соответствующие значения тока.
(22) Значения напряжения, собранные от вольтметров на устройстве, при этом конкретная система SCADA должна регистрировать время сбора, ID/номера вольтметров и соответствующие значения напряжения.
3. Система проектирования устройства
Для системы проектирования устройства данные, собранные посредством модуля 21 получения данных для многомерных состояний устройства, могут содержать:
(31) Расстояние между датчиками на устройстве
(32) Длину трубопроводов на устройстве
(33) Данные проектирования трубопроводов на устройстве, например, формы и размеры компонентов трубопроводов, соединения между компонентами и расстояния между компонентами.
4. Система моделирования
Иногда, система моделирования может быть использована, чтобы моделировать фактический производственный процесс, и, в этом случае, модуль 21 получения данных может непосредственно собирать требуемые данные многомерных состояний устройства.
Этап 302: Модуль 22 корреляционного анализа применяет предварительно заданный алгоритм корреляционного анализа, чтобы выполнять корреляционный анализ собранных хронологических данных многомерных состояний устройства для получения вектора корреляционного индикатора, при этом вектор корреляционного индикатора указывает коррелированные измерения состояния и описание корреляции между коррелированными размерными состояниями.
Следует отметить, что, когда корреляционный анализ выполняется для собранных хронологических данных многомерных состояний устройства на этом этапе, измерения состояния могут быть основаны на собираемом объекте данных состояния, например, данные состояния, приходящие от каждого собранного объекта, такого как датчик или измерительный инструмент, используются в качестве данных размерного состояния.
Временной диапазон хронологических данных может быть задан пользователем и может быть последним месяцем или последним годом, например.
Например, когда модуль 22 корреляционного вычисления выполняет корреляционный анализ хронологических данных для n (n является целым числом больше 1) размерных состояний устройства, полученный вектор корреляционного индикатора указывает, что m (m является целым числом больше 1, но меньшим или равным n) размерных состояний коррелируют, и вектор корреляционного индикатора содержит описание корреляции между m размерных состояний.
Описание корреляции между коррелированными размерными состояниями может быть следующим: Изменение размерного состояния или многомерных состояний вызовет изменение в другом размерном состоянии или других многомерных состояниях. Например, когда первое изменение случается в состоянии измерения a в первое время, второе изменение будет вызвано в состоянии измерения b во второе время, третье изменение будет вызвано в состоянии измерения c в третье время, …, при этом первое время, второе время, третье время,…, могут быть моментом времени или временным диапазоном.
Например, если измерения состояния, связанные с вибрациями в позиции насоса, необходимо проанализировать, модуль 22 корреляционного вычисления выполняет корреляционный анализ хронологических данных вибрационного состояния измерения a, собранных посредством модуля 21 получения данных от вибрационного датчика (датчика A) в позиции, и хронологических данных состояний, собранных от других датчиков на насосе, и, наконец, выясняет, что состояния соответствующих измерений b, d и f датчиков B, D и F коррелируют с вибрационным состоянием размера a датчика A, и получает описание (например, как долго и какое изменение случится в данных состояний измерений b, d и f, выводимых из датчиков B, D и F, после того как датчик A обнаруживает, что вибрационное состояние размера a усиливается: например, температура, выводимая из датчика B, будет расти в диапазоне 0-10 мс, после того как датчик A обнаруживает, что вибрация усиливается) о корреляции между состояниями измерений b, d и f и состоянием измерения a.
В практических применениях, пользователь может задавать целевое измерение состояния для корреляционного анализа в модуле 22 корреляционного вычисления, и модуль 22 корреляционного вычисления будет вычислять измерения, связанные с целевым измерением состояния согласно собранным хронологическим данным всех измерений состояния устройства.
При этом алгоритм корреляционного анализа является, например, алгоритмом корреляции Пирсона или алгоритмом корреляции Кендалла. Алгоритм корреляционного анализа не ограничивается в настоящем изобретении и может быть предварительно задан заранее согласно опыту и сценарию.
Кроме того, пользователю дополнительно необходимо конфигурировать некоторые параметры конфигурации, необходимые для корреляционного анализа в модуле 22 корреляционного вычисления, например, конфигурировать временной диапазон (например, в последнем месяце или последнем году) хронологических данных состояния, и пороговое значение определения корреляции (например, когда корреляция между двумя измерениями состояния больше первого порогового значения, два измерения состояния определяются как коррелирующие, а иначе, два измерения состояния являются некоррелирующими).
После того как модуль 22 корреляционного вычисления получает вектор корреляционного индикатора, вектор корреляционного индикатора может быть выведен посредством модуля 25 человеко-машинного взаимодействия, и пользователь может модифицировать вектор корреляционного индикатора (например, удалять часть измерений состояния из вектора корреляционного индикатора или добавлять другие измерения состояния в вектор корреляционного индикатора) согласно его/ее собственному решению, или пользователь может изменять значения части или всех параметров конфигурации алгоритма корреляционного анализа через модуль 25 человеко-машинного взаимодействия и инициировать модуль 22 корреляционного вычисления, чтобы выполнять корреляционный анализ снова до тех пор, пока пользователь не будет удовлетворен выходным вектором корреляционного индикатора.
Этап 303: Модуль 23 установления эталонной модели состояния определяет коррелированные измерения состояния согласно вектору корреляционного индикатора, сформированному посредством модуля 22 корреляционного вычисления, получает хронологические данные коррелированных размерных состояний от модуля 21 получения данных и использует предварительно заданный алгоритм для установления эталонной модели состояния устройства, чтобы моделировать полученные хронологические данные коррелированных размерных состояний для получения эталонной модели состояния устройства.
Например, если вектор корреляционного индикатора, сформированный посредством модуля 22 корреляционного вычисления, указывает, что m размерных состояний устройства являются коррелированными, модуль 23 установления эталонной модели состояния получает хронологические данные для m размерных состояний от модуля 21 получения данных. Временной диапазон хронологических данных может быть задан пользователем.
Алгоритм для установления эталонной модели состояния устройства является, например, алгоритмом процесса Дирихле, основанным на модели смеси нормальных распределений. Алгоритм для установления эталонной модели состояния устройства не ограничивается в настоящем изобретении и может быть предварительно задан заранее согласно опыту и сценарию.
Кроме того, пользователю дополнительно необходимо конфигурировать некоторые параметры конфигурации, необходимые для алгоритма для установления эталонной модели состояния устройства, в модуле 23 установления эталонной модели состояния, например,
конфигурировать временной диапазон (например, в последний месяц или последний год) хронологических данных состояния.
Аналогично, после того как модуль 23 установления справочной модели состояния получает справочную модель состояния устройства, справочная модель состояния устройства может быть выведена пользователю через модуль 25 человеко-машинного взаимодействия, и пользователь может модифицировать эталонную модель состояния устройства через модуль 25 человеко-машинного взаимодействия, или пользователь может изменять значения части или всех параметров конфигурации алгоритма для установления эталонной модели состояния устройства через модуль 25 человеко-машинного взаимодействия и инициировать модуль 23 установления эталонной модели состояния, чтобы повторно устанавливать эталонную модель состояния устройства до тех пор, пока пользователь не будет удовлетворен выходной эталонной моделью состояния устройства.
Этап 304: Модуль 24 онлайн-наблюдения получает данные реального времени для соответствующих коррелированных размерных состояний модели от модуля 21 получения данных в реальном времени согласно установленной эталонной модели состояния устройства и определяет, является ли текущее состояние устройства нормальным, согласно предварительно заданному условию определения состояния устройства, данным реального времени коррелированных размерных состояний и эталонной модели состояния устройства.
Аналогично, после того как модуль 24 онлайн-наблюдения получает результат наблюдения состояния устройства (нормальное или ненормальное), результат наблюдения состояния устройства может быть выведен пользователю через модуль 25 человеко-машинного взаимодействия, и пользователь может модифицировать результат наблюдения состояния устройства через модуль 25 человеко-машинного взаимодействия согласно опыту. Если пользователь модифицирует текущее состояние устройства согласно опыту, соответствующая эталонная модель состояния устройства может считаться неточной, и данные реального времени, полученные на этапе 104, для соответствующих коррелированных размерных состояний эталонной модели состояния устройства используются в качестве хронологических данных, чтобы повторно устанавливать эталонную модель состояния устройства.
Учитывая, что износ оборудования вызовет изменение производительности устройства, этапы 301-303 могут быть выполнены с интервалами, например, однократно в месяц, чтобы непрерывно обновлять эталонную модель состояния устройства, или могут быть выполнены в любое время согласно требованиям пользователя.
Фиг. 4 показывает структуру средства 40 для наблюдения состояния устройства в обрабатывающей промышленности в другом варианте осуществления настоящего изобретения, и средство содержит процессор 41 и память 42, при этом приложения хранятся в памяти 42, причем эти приложения могут исполняться процессором 41, чтобы предоставлять возможность процессору 41 выполнять следующие этапы способа для наблюдения состояния устройства в обрабатывающей промышленности:
сбор и сохранение данных многомерных состояний устройства в обрабатывающей промышленности;
применение предварительно заданного алгоритма корреляционного анализа для выполнения корреляционного анализа собранных хронологических данных многомерных состояний устройства, чтобы получать коррелированные измерения состояния;
получение хронологических данных коррелированных размерных состояний согласно полученным коррелированным измерениям состояния и применение предварительно заданного алгоритма для установления эталонной модели состояния устройства, чтобы моделировать полученные хронологические данные коррелированных размерных состояний для получения эталонной модели состояния устройства;
получение данных реального времени для соответствующих коррелированных размерных состояний эталонной модели состояния устройства в реальном времени и определение того, является ли текущее состояние устройства нормальным, согласно предварительно заданному условию определения состояния устройства, данным реального времени коррелированных размерных состояний и эталонной модели состояния устройства.
В практических применениях, этап, выполняемый процессором 41 для сбора и сохранения данных многомерных состояний устройства в обрабатывающей промышленности в реальном времени, в частности, содержит:
сбор данных многомерных состояний устройства в обрабатывающей промышленности из одной или какого-либо сочетания системы получения производственных данных, системы диспетчерского управления и получения данных и системы моделирования и сохранение данных, или сбор данных многомерных состояний устройства в обрабатывающей промышленности в реальном времени из одной или какого-либо сочетания системы получения производственных данных, системы диспетчерского управления и получения данных и системы моделирования, и системы проектирования данных и сохранение данных.
В практических применениях, после получения коррелированных измерений состояния, процессор 41 дополнительно выполняет следующий этап:
вывод полученных коррелированных измерений состояния пользователю, и если принимается модифицирующая информация, введенная пользователем относительно коррелированных измерений состояния, модификацию коррелированных измерений состояния согласно модифицирующей информации.
В практических применениях, после получения эталонной модели состояния устройства, процессор 41 дополнительно выполняет следующий этап:
вывод полученной эталонной модели состояния устройства пользователю, и если принимается модифицированная информация, введенная пользователем относительно эталонной модели состояния устройства, модификацию эталонной модели состояния устройства согласно модифицирующей информации.
В практических применениях, алгоритм корреляционного анализа является алгоритмом корреляции Пирсона и/или алгоритмом корреляции Кендалла, а алгоритм для установления эталонной модели состояния устройства является алгоритмом процесса Дирихле, основанным на модели смеси нормальных распределений.
Настоящее изобретение дополнительно предоставляет компьютерно-читаемый носитель хранения, компьютерно-читаемый носитель хранения хранит компьютерную программу, и компьютерная программа выполняет следующие этапы способа для наблюдения состояния устройства в обрабатывающей промышленности, когда исполняется процессором: сбор и сохранение данных многомерных состояний устройства в обрабатывающей промышленности;
применение предварительно заданного алгоритма корреляционного анализа для выполнения корреляционного анализа собранных хронологических данных многомерных состояний устройства, чтобы получать коррелированные измерения состояния;
получение хронологических данных коррелированных размерных состояний согласно полученным коррелированным измерениям состояния и применение предварительно заданного алгоритма для установления эталонной модели состояния устройства, чтобы моделировать полученные хронологические данные коррелированных размерных состояний для получения эталонной модели состояния устройства;
получение данных реального времени для соответствующих коррелированных размерных состояний эталонной модели состояния устройства в реальном времени и определение того, является ли текущее состояние устройства нормальным, согласно предварительно заданному условию определения состояния устройства, данным реального времени коррелированных размерных состояний и эталонной модели состояния устройства.
В практических применениях, этап, выполняемый посредством компьютерной программы для сбора и сохранения данных многомерных состояний устройства в обрабатывающей промышленности в реальном времени, в частности, содержит:
сбор данных многомерных состояний устройства в обрабатывающей промышленности из одной или какого-либо сочетания системы получения производственных данных, системы диспетчерского управления и получения данных и системы моделирования и сохранение данных, или сбор данных многомерных состояний устройства в обрабатывающей промышленности в реальном времени из одной или какого-либо сочетания системы получения производственных данных, системы диспетчерского управления и получения данных и системы моделирования, и системы проектирования данных и сохранение данных.
В практических применениях, когда исполняется процессором, компьютерная программа дополнительно выполняет следующий этап: вывод полученных коррелированных измерений состояния пользователю, и если принимается модифицирующая информация, введенная пользователем относительно коррелированных измерений состояния, модификацию коррелированных измерений состояния согласно модифицирующей информации.
В практических применениях, когда исполняется процессором, компьютерная программа дополнительно выполняет следующий этап:
вывод полученной эталонной модели состояния устройства пользователю,
и если принимается модифицирующая информация, введенная пользователем, относительно эталонной модели состояния устройства, модификацию эталонной модели состояния устройства согласно модифицирующей информации.
В практических применениях, алгоритм корреляционного анализа является алгоритмом корреляции Пирсона и/или алгоритмом корреляции Кендалла, а алгоритм для установления эталонной модели состояния устройства является алгоритмом процесса Дирихле, основанным на модели смеси нормальных распределений.
Преимущества настоящего изобретения являются следующими: Реализуется онлайн-наблюдение состояния устройства; наполовину диспетчерский контроль применяется, и визуализация с помощью интерактивного обнаружения знаний поддерживается, так что пользователи, например, операторы устройства/инженеры, могут объединять свой опыт/знания в этой области для участия во всем процессе наблюдения состояния устройства и создавать адаптивные и надежные эталонные модели состояния устройства в различных окружающих условиях.
Вышеупомянутые варианты осуществления являются лишь предпочтительными вариантами осуществления настоящего изобретения, но не используются для ограничения настоящего изобретения. Без отступления от духа и принципа настоящего изобретения, модификации, эквивалентные замены и улучшения, все должны попадать в рамки защиты настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и система удаленного мониторинга и прогнозирования состояния технологических объектов | 2020 |
|
RU2739727C1 |
| КОНТРОЛИРУЮЩАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ТЕПЛОВОЙ ОБРАБОТКИ | 2013 |
|
RU2653733C2 |
| СПОСОБ И СИСТЕМА УДАЛЕННОГО МОНИТОРИНГА ОБЪЕКТОВ | 2016 |
|
RU2649542C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СИНХРОНИЗАЦИИ ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ СИСТЕМЫ РЕАЛЬНОГО ВРЕМЕНИ | 2005 |
|
RU2291558C2 |
| СПОСОБ И СИСТЕМА УДАЛЁННОЙ ИДЕНТИФИКАЦИИ И ПРОГНОЗИРОВАНИЯ РАЗВИТИЯ ЗАРОЖДАЮЩИХСЯ ДЕФЕКТОВ ОБЪЕКТОВ | 2018 |
|
RU2686257C1 |
| Способ оценки параметров профиля поверхности на основе вероятностно-статистической классификации спектра профилограммы | 2019 |
|
RU2708500C1 |
| СПОСОБ И СИСТЕМА УДАЛЕННОГО МОНИТОРИНГА ЭНЕРГЕТИЧЕСКИХ УСТАНОВОК | 2016 |
|
RU2626780C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2816667C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ | 2023 |
|
RU2809719C1 |
| Способ релейной защиты энергообъекта | 2019 |
|
RU2720710C1 |
Изобретение относится к технической области наблюдения за устройством в обрабатывающей промышленности и, в частности, относится к способу, средству и компьютерному носителю хранения информации для наблюдения состояния устройства. Для наблюдения за состоянием и обеспечения возможности онлайн-наблюдения за состоянием устройства собирают и сохраняют данные многомерных состояний устройства, используют предварительно заданный алгоритм корреляционного анализа для выполнения корреляционного анализа собранных хронологических данных многомерных состояний устройства, используют предварительно заданный алгоритм для установления эталонной модели состояния устройства. Чтобы моделировать полученные хронологические данные коррелированных размерных состояний получают данные в реальном времени для соответствующих коррелированных размерных состояний эталонной модели состояния устройства, определяют, является ли текущее состояние устройства нормальным, согласно предварительно заданному условию определения состояния устройства, данным реального времени, коррелированных размерных состояний и эталонной модели состояния устройства. Обеспечивается возможность определять работоспособности оборудования онлайн, получать фиксированные правила для наблюдения состояния жизненного цикла оборудования, особенно в обрабатывающей промышленности, где затрагиваются сложные и очень чувствительные взаимозависимости между большим числом переменных, вследствие недостатка точного определения границы между нормальными и ненормальными состояниями оборудования. 4 н. и 7 з.п. ф-лы, 4 ил.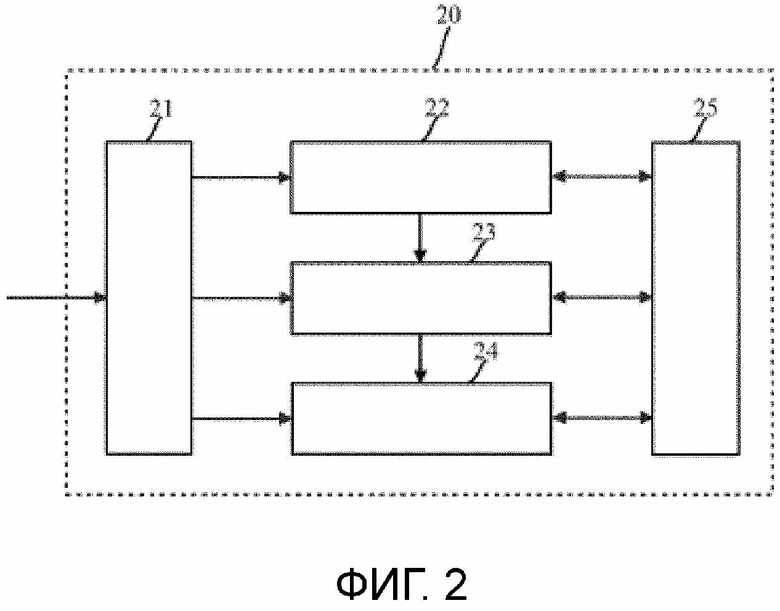
1. Способ для наблюдения состояния устройства в обрабатывающей промышленности, содержащий этапы, на которых:
собирают и сохраняют данные многомерных состояний устройства в обрабатывающей промышленности;
используют предварительно заданный алгоритм корреляционного анализа для выполнения корреляционного анализа собранных хронологических данных многомерных состояний устройства, чтобы получать коррелированные измерения состояния;
получают хронологические данные для каждого коррелированного размерного состояния согласно полученным коррелированным измерениям состояния, и осуществляют моделирование на основе хронологических данных для каждого коррелированного размерного состояния с использованием предварительно заданного алгоритма для установления эталонной модели состояния устройства, и получают эталонную модель состояния устройства;
получают данные реального времени для каждого коррелированного размерного состояния, соответствующего состоянию устройства в эталонной модели в реальном времени, и определяют, согласно предварительно заданному условию определения состояния устройства и данным реального времени для каждого из коррелированных размерных состояний в сочетании с эталонной моделью состояния устройства, является ли текущее состояние устройства нормальным.
2. Способ по п. 1, характеризующийся тем, что этап сбора и сохранения данных многомерных состояний устройства в обрабатывающей промышленности содержит этапы, на которых:
собирают данные многомерных состояний устройства в обрабатывающей промышленности из одной или какого-либо сочетания из системы получения производственных данных, системы диспетчерского управления и получения данных и системы моделирования, и сохраняют данные,
или собирают данные многомерных состояний устройства в обрабатывающей промышленности из одной или какого-либо сочетания из системы получения производственных данных, системы диспетчерского управления и получения данных и системы моделирования, и системы проектирования устройства, и сохраняют данные.
3. Способ по п. 1, отличающийся тем, что после получения коррелированных измерений состояния способ дополнительно содержит этапы, на которых:
выводят полученные коррелированные измерения состояния пользователю, и если принимается модифицирующая информация, введенная пользователем относительно коррелированных измерений состояния, модифицируют коррелированные измерения состояния согласно модифицирующей информации.
4. Способ по п. 1, отличающийся тем, что после получения эталонной модели состояния устройства способ дополнительно содержит этапы, на которых:
выводят полученную эталонную модель состояния устройства пользователю, и если принимается модифицированная информация, введенная пользователем относительно эталонной модели состояния устройства, модифицируют эталонную модель состояния устройства согласно модифицирующей информации.
5. Способ по п. 1, отличающийся тем, что алгоритм корреляционного анализа является алгоритмом корреляции Пирсона и/или алгоритмом корреляции Кендалла, и
алгоритм для установления эталонной модели состояния устройства является, например, алгоритмом процесса Дирихле, основанным на модели смешивания нормальных распределений.
6. Средство (20) для наблюдения состояния устройства в обрабатывающей промышленности, содержащее:
модуль (21) получения данных, собирающий и сохраняющий данные многомерных состояний устройства в обрабатывающей промышленности,
модуль (22) корреляционного вычисления, использующий предварительно заданный алгоритм корреляционного анализа для выполнения корреляционного анализа хронологических данных, собранных посредством модуля (21) получения данных многомерных состояний устройства, чтобы получать коррелированные измерения состояния,
модуль (23) установления эталонной модели состояния, получающий хронологические данные для каждого коррелированного размерного состояния от модуля (21) получения данных согласно коррелированным измерениям состояния, полученным посредством модуля (22) корреляционного вычисления, и осуществляющий моделирование на основе хронологических данных для каждого коррелированного размерного состояния с использованием предварительно заданного алгоритма для установления эталонной модели состояния устройства, чтобы моделировать полученные хронологические данные коррелированных размерных состояний для получения эталонной модели состояния устройства, и
модуль (24) онлайн-наблюдения, получающий данные реального времени для каждого коррелированного размерного состояния, соответствующего состоянию устройства в эталонной модели в реальном времени, от модуля (21) получения согласно эталонной модели состояния устройства, установленной посредством модуля (23) установления эталонной модели состояния, и определяющий, является ли текущее состояние устройства нормальным, согласно предварительно заданному условию определения состояния устройства, данным реального времени коррелированных размерных состояний и эталонной модели состояния устройства.
7. Средство (20) по п. 6, отличающееся тем, что модуль (21) получения данных, собирающий и сохраняющий данные многомерных состояний устройства в обрабатывающей промышленности, в частности, используется, чтобы:
собирать данные многомерных состояний устройства в обрабатывающей промышленности из одной или какого-либо сочетания системы получения производственных данных, системы диспетчерского управления и получения данных и системы моделирования и сохранять данные,
или собирать данные многомерных состояний устройства в обрабатывающей промышленности из одной или какого-либо сочетания системы получения производственных данных, системы диспетчерского управления и получения данных и системы моделирования, и системы проектирования устройства и сохранять данные.
8. Средство (20) по п. 6, отличающееся тем, что оно дополнительно содержит модуль (25) человеко-машинного взаимодействия, и
модуль (22) корреляционного вычисления дополнительно используется, чтобы выводить полученные коррелированные измерения состояния пользователю через модуль (25) человеко-машинного взаимодействия, и если принимается модифицирующая информация, введенная пользователем относительно коррелированных измерений состояния, от модуля (25) человеко-машинного взаимодействия, модифицировать коррелированные измерения состояния согласно модифицирующей информации.
9. Средство (20) по п. 6, отличающееся тем, что оно дополнительно содержит модуль (25) человеко-машинного взаимодействия, и
модуль (23) установления эталона состояния дополнительно используется, чтобы выводить полученную эталонную модель состояния устройства пользователю через модуль (25) человеко-машинного взаимодействия, и если принимается модифицирующая информация, введенная пользователем относительно эталонной модели состояния устройства, от модуля (25) человеко-машинного взаимодействия, модифицировать эталонную модель состояния устройства согласно модифицирующей информации.
10. Компьютерно-читаемый носитель данных, содержащий компьютерную программу, характеризующуюся тем, что компьютерная программа выполняет этапы способа для наблюдения состояния устройства в обрабатывающей промышленности по любому из пп. 1-5, когда исполняется процессором.
11. Средство (40) для наблюдения состояния устройства в обрабатывающей промышленности, отличающееся тем, что оно содержит процессор (41) и память (42), и приложения, которые могут исполняться процессором (41), чтобы предоставлять возможность процессору (41) выполнять этапы способа для наблюдения состояния устройства в обрабатывающей промышленности по любому из пп. 1-5, хранятся в памяти (42).
| CN 105787809 A, 20.07.2016 | |||
| CN 106228472 A, 14.12.2016 | |||
| CN 106203642 A, 07.12.2016 | |||
| СПОСОБ И УСТРОЙСТВО ВЫБОРА ПРЕДПОЧТИТЕЛЬНОГО СРЕДСТВА ЗАЩИТЫ ИНФОРМАЦИИ | 2011 |
|
RU2495482C2 |
| СИНХРОНИЗАЦИЯ ТАКТОВЫХ ГЕНЕРАТОРОВ В АСИНХРОННОЙ РАСПРЕДЕЛЕННОЙ СИСТЕМЕ | 2009 |
|
RU2485570C2 |

