Изобретение относится к области радиотехники и может быть использовано в приемниках глобальных навигационных спутниковых систем, использующих широкополосные сигналы с модуляцией на поднесущих частотах (в англоязычной литературе используется термин BOC-сигналы).
Известно устройство для обработки навигационных сигналов глобальных навигационных спутниковых систем, содержащее первый и второй перемножители входного сигнала, генератор опорных сигналов, в первом перемножителе входной сигнал перемножается с опорным сигналом на частоте, отличающейся от несущей частоты входного сигнала на частоту меандра в большую сторону, во втором перемножителе входной сигнал перемножается с опорным сигналом на частоте, отличающейся от несущей частоты входного сигнала на частоту меандра в меньшую сторону. Выход первого перемножителя подсоединен ко входам третьего и четвертого перемножителей, выход второго перемножителя подсоединен к входам пятого и шестого перемножителей, при этом на вход третьего и пятого перемножителя также подается сигнал с первого выхода генератора дальномерного кода, являющийся опережающей копией сигнала дальномерного кода, на вход четвертого и шестого перемножителей также подается сигнал со второго выхода генератора дальномерного кода, являющийся опережающей копией сигнала дальномерного кода. Выходы третьего, четвертого, пятого и шестого перемножителей соответственно соединены со входами первого, второго, третьего и четвертого интеграторов. Выходы первого и второго интеграторов подсоединены к первому вычитающему устройству, при этом сигнал с выхода первого интегратора подается на суммирующий вход вычитающего устройства, сигнал с выхода второго интегратора подается на вычитающий вход вычитающего устройства. Выходы третьего и четвертого интеграторов подсоединены ко второму вычитающему устройству, при этом сигнал с выхода третьего интегратора подается на суммирующий вход вычитающего устройства, сигнал с выхода четвертого интегратора подается на вычитающий вход вычитающего устройства. Сигналы с выхода вычитающих устройств подаются на входы сумматора, выход которого является выходом всего устройства [Помехоустойчивость мультисистемной аппаратуры потребителей ГНСС: монография / В.В. Неровный. Воронеж: Издательско-полиграфический центр «Научная книга», 2018. с. 120].
Основным недостатком данного устройства является высокая вероятность ошибки по знаку сигнала на выходе устройства, возникающая при приеме сигнала с навигационным сообщением, что обусловлено инвертированием знака функции дальномерного кода при отрицательном символе навигационного сообщения в информационном сигнале.
Наиболее близким по технической сущности к заявленному изобретению является устройство для обработки навигационных сигналов ГЛОНАСС, GPS и ГАЛИЛЕО (прототип), содержащее первый и второй перемножители входного сигнала соответственно с сигналами синфазной и квадратурной несущими опорного генератора, управляемого по частоте, многоканальный коррелятор, включающий первый, второй, третий и четвертый перемножители сигналов с сигналом опережающей реплики кода генератора дальномерного кода, пятый и шестой перемножители сигналов с сигналом отстающей реплики кода генератора дальномерного кода, соединенные соответственно с входами первого, второго, третьего, четвертого, пятого и шестого интеграторов, выходы которых являются соответственно первым, вторым, третьим, четвертым, пятым и шестым выходами многоканального коррелятора, а также вычислитель [Патент RU 2435307 С1, МПК Н04В 7/185 (2006.01), опуб. 27.11.2011, бюлл. №33].
Недостатком устройства прототипа является низкая точность слежения за задержкой сигнала и потеря информации о фазе принимаемого сигнала в блоках вычисления квадрата сигнала, что устраняет влияние символов навигационного сообщения на сигнал на выходе устройства.
Техническим результатом изобретения является повышение точности слежения за задержкой сигнала и сохранение информации о символе навигационного сообщения в сигнале на выходе устройства.
Указанный технический результат достигается тем, что устройство для обработки навигационных сигналов глобальных навигационных спутниковых систем содержит первый и второй перемножители сигналов, первые входы которых объединены и являются входом устройства, управляемый по частоте генератор опорных сигналов, первый и второй выходы которого соединены со вторыми входами первого и второго перемножителей сигналов соответственно, шестиканальный коррелятор, каждый из каналов которого содержит последовательно соединенные перемножитель сигналов и интегратор, выходы интеграторов являются соответствующими выходами шестиканального коррелятора, генератор дальномерного кода, а также первое вычитающее устройство и сумматор, согласно изобретению дополнительно введены второе вычитающее устройство, третий и четвертый перемножители сигналов, выходы которых соединены с первым и вторым входами сумматора, при этом выход первого перемножителя сигналов соединен с объединенными первыми входами перемножителей сигналов первого, второго и третьего каналов шестиканального коррелятора, выход второго перемножителя сигналов соединен с объединенными первыми входами перемножителей сигналов четвертого, пятого и шестого каналов шестиканального коррелятора, генератор дальномерного кода выполнен с тремя выходами, первый выход которого соединен с объединенными входами перемножителей сигналов первого и четвертого каналов шестиканального коррелятора, второй выход генератора дальномерного кода соединен с объединенными входами перемножителей сигналов второго и пятого каналов шестиканального коррелятора, третий выход генератора дальномерного кода соединен с объединенными входами перемножителей сигналов третьего и шестого каналов шестиканального коррелятора, выходы интегратора первого канала и выход интегратора второго канала шестиканального коррелятора соединены соответственно с первым и вторым входами первого вычитающего устройства, выход которого соединен с первым входом третьего перемножителя сигналов, выходы интеграторов четвертого и пятого каналов шестиканального коррелятора соединены с первым и вторым входами второго вычитающего устройства соответственно, а выход - с первым входом четвертого перемножителя сигналов, выходы интеграторов третьего и шестого каналов шестиканального коррелятора соединены соответственно с вторыми входами третьего и четвертого перемножителей сигналов, выход сумматора соединен с управляющим входом генератора дальномерного кода и является выходом всего устройства.
Сущность изобретения заключается в том, что дополнительно введены второе вычитающее устройство, третий и четвертый перемножители сигналов, выходы которых соединены с первым и вторым входами сумматора, при этом выход первого перемножителя сигналов соединен с объединенными первыми входами перемножителей сигналов первого, второго и третьего каналов шестиканального коррелятора, выход второго перемножителя сигналов соединен с объединенными первыми входами перемножителей сигналов четвертого, пятого и шестого каналов шестиканального коррелятора, генератор дальномерного кода выполнен с тремя выходами, первый выход которого соединен с объединенными входами перемножителей сигналов первого и четвертого каналов шестиканального коррелятора, второй выход генератора дальномерного кода соединен с объединенными входами перемножителей сигналов второго и пятого каналов шестиканального коррелятора, третий выход генератора дальномерного кода соединен с объединенными входами перемножителей сигналов третьего и шестого каналов шестиканального коррелятора, выходы интегратора первого канала и выход интегратора второго канала шестиканального коррелятора соединены соответственно с первым и вторым входами первого вычитающего устройства, выход которого соединен с первым входом третьего перемножителя сигналов, выходы интеграторов четвертого и пятого каналов шестиканального коррелятора соединены с первым и вторым входами второго вычитающего устройства соответственно, а выход - с первым входом четвертого перемножителя сигналов, выходы интеграторов третьего и шестого каналов шестиканального коррелятора соединены соответственно с вторыми входами третьего и четвертого перемножителей сигналов, выход сумматора соединен с управляющим входом генератора дальномерного кода и является выходом всего устройства.
В устройстве прототипе сигналы с выходов каждого канала многоканального коррелятора поступают в блок вычисления квадрата сигнала. Затем опережающие компоненты коррелятора, возведенные в квадрат, поступают в первый сумматор. Запаздывающие компоненты коррелятора, возведенные в квадрат, поступают во второй сумматор. Сигналы с выходов сумматоров поступают на входы вычислителя, состоящего из вычитающего устройства, сумматора и делителя, соединенных определенным образом. В условиях приема навигационного сигнала с модуляцией навигационным сообщением синфазные компоненты коррелятора при отрицательных символах навигационного сообщения будут также иметь отрицательный знак, который устраняется в блоке вычисления квадрата сигнала. При последующей обработке сигнала происходит формирование сигнала, прямо пропорционального смещению по времени функций дальномерного кода опорного относительно входного сигналов. Знак выходного сигнала устройства зависит только от того, в какую сторону во временной области смещен опорный сигнал относительно входного и не содержит информацию о значении символа навигационного сообщения. Необходимо отметить, что устройство прототип работает в некогерентном режиме, недостатком которого является низкая точность слежения за задержкой сигнала [ГЛОНАСС. Принципы построения и функционирования / Под ред. А.И. Перова, В.Н. Харисова. М.: Радиотехника, 2010. С. 142]
Навигационный ВОС сигнал можно представить, как сумму двух BPSK сигналов, смещенных в спектральной области относительно несущей частоты на частоту следования импульсов меандрового поднесущего колебания (МПК). В изобретении обработка сигнала происходит как двух BPSK сигналов параллельно - на «верхней» поднесущей частоте и «нижней» поднесущей частоте. Для обработки входного сигнала на поднесущих частотах, согласно изобретению, генератор опорного сигнала генерирует синфазные гармонические колебания на «верхней» и «нижней» поднесущих частотах. Входной сигнал параллельно перемножается с данными опорными гармоническими колебаниями. Результаты перемножения подаются на объединенные определенным образом входы каналов шестиканального коррелятора. На каждой из поднесущих частот дальнейшая обработка сигнала осуществляется в трех каналах шестиканального коррелятора в соответствии с технологией замены производной сигнальной функции по задержке вычислением конечных приращений [ГЛОНАСС. Принципы построения и функционирования / Под ред. А.И. Перова, В.Н. Харисова. М.: Радиотехника, 2010. С. 493], в которых формируются напряжения, которые представляют собой опережающую, запаздывающую и синхронную по времени компоненты коррелятора. Согласно изобретению, в генератор дальномерного кода введен третий выход для формирования синхронной по времени копии дальномерного кода. Также, согласно изобретению, введено второе вычитающее устройство для обеспечения обработки сигнала на двух поднесущих частотах. В вычитающих устройствах происходит сравнение опережающей и запаздывающей компонент, сформированных в шестиканальном корреляторе на «верхней» и «нижней» поднесущих частотах, и формируется напряжение, прямо пропорциональное рассогласованию по времени принятого и опорного сигнала. В связи с тем, что входной сигнал имеет дополнительную манипуляцию навигационным сообщением, отрицательные символы навигационного сообщения приводят к инверсии знака функции дальномерного кода. Поэтому сигналы на выходах вычитающих устройств в условии приема навигационного сигнала с навигационным сообщением имеют неоднозначность по знаку, так как значение символа навигационного сообщения является неизвестным параметром входного сигнала. Для устранения указанной неоднозначности, согласно изобретению, синхронные компоненты, сформированные в соответствующих каналах шестиканального коррелятора на двух поднесущих частотах перемножаются с сигналами с выходов соответствующих вычитающих устройств. Синхронная компонента имеет знак, соответствующий знаку модулирующей функции навигационного сообщения и при отрицательном символе навигационного сообщения перемножение двух отрицательных величин дает положительное значение в результате. Этим достигается указанный в изобретении технический результат. Благодаря кольцу обратной связи в установившемся режиме работы устройства синхронная по времени копия дальномерного кода, формируемая на соответствующем выходе генератора дальномерного кода, имеет достаточно высокую синхронизацию по времени с принимаемым сигналом для работы в качестве опорного сигнала в схеме слежения за фазой приемника сигналов глобальных навигационных спутниковых систем.
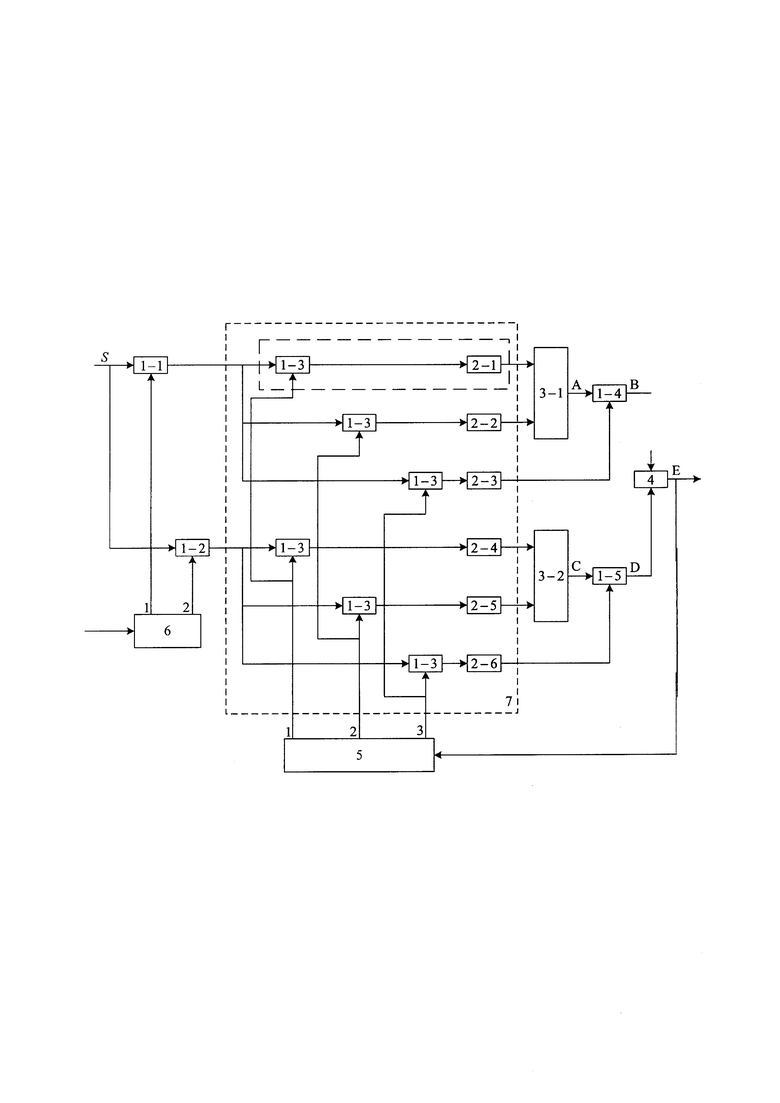
Вариант структурной схемы устройства представлен на фигуре, где обозначены: 1 - перемножитель сигналов; 2 - интегратор канала шестиканального коррелятора; 3 - вычитающее устройство; 4 - сумматор; 5 - управляемый по задержке генератор дальномерного кода; 6 - генератор опорного сигнала; 7 - шестиканальный коррелятор; А, В, С, D - сигналы с выходов соответствующих элементов схемы устройства.
Назначения указанных устройств ясны из их названия и могут быть реализованы на элементной базе, выпускаемой в промышленности.
Устройство работает следующим образом.
Сигнал с выхода высокочастотной части приемника в цифровой форме поступает на объединенные первые входы перемножителей сигналов 1-1 и 1-2. На вторые входы перемножителей 1-1 и 1-2 поступают гармонические опорные сигналы с первого и второго выходов генератора опорного сигнала 6 на «нижней» и «верхней» частотах соответственно. В результате перемножения входного сигнала с опорными гармоническими колебаниями происходит выделение огибающей принятого сигнала на соответствующих поднесущих частотах. Дальнейшая обработка принятого навигационного сигнала происходит параллельно на поднесущих частотах. Сигнал с выхода перемножителя 1-1 поступает на объединенные первые входы перемножителей 1-3 первого, второго и третьего каналов шестиканального коррелятора. Сигнал с выхода перемножителя 1-2 поступает на объединенные первые входы перемножителей 1-3 четвертого, пятого и шестого каналов шестиканального коррелятора. На объединенные вторые входы перемножителей 1-3 первого и четвертого каналов шестиканального коррелятора поступает опережающий опорный сигнал с первого выхода генератора дальномерного кода 5. На выходе первого и четвертого каналов шестиканального коррелятора формируются сигналы, напряжение которых прямо пропорционально смещению по времени дальномерного кода принятого сигнала в сторону опережения. На объединенные вторые входы перемножителей 1-3 второго и пятого каналов шестиканального коррелятора поступает запаздывающий опорный сигнал со второго выхода генератора дальномерного кода 5. На выходе второго и пятого каналов шестиканального коррелятора формируются сигналы, напряжение которых прямо пропорционально смещению по времени дальномерного кода принятого сигнала в сторону запаздывания. На объединенные вторые входы перемножителей 1-3 третьего и шестого каналов шестиканального коррелятора поступает синхронный опорный сигнал с третьего выхода генератора дальномерного кода 5. На выходе третьего и шестого каналов многоканального коррелятора формируются сигналы, напряжение которых прямо пропорционально рассогласованию по времени дальномерного кода принятого сигнала и опорного сигнала. Сигналы с выходов первого и второго каналов поступают на первый и второй входы вычитающего устройства 3-1, сигналы с выходов четвертого и пятого каналов поступают на первый и второй входы вычитающего устройства 3-2. На выходах вычитающих устройств формируются сигналы ошибки, прямо пропорциональные рассогласованию по времени принятого и опорного сигнала. В связи с тем, что входной сигнал имеет дополнительную манипуляцию навигационным сообщением, данная манипуляция отрицательными символами навигационного сообщения будет приводить к инверсии символов дальномерного кода и сигналы на выходе вычитающих устройств 3-1 и 3-2 имеют неоднозначность по знаку, так как знак символа навигационного сообщения является неизвестным параметром входного сигнала. Для устранения указанной неоднозначности сигналы ошибки с выходов вычитающих устройств 3-1 и 3-2 перемножаются в перемножителях 1-4 и 1-5 соответственно с сигналами с выходов третьего и шестого каналов шестиканального коррелятора. Сигналы каналов второго и шестого каналов шестиканального коррелятора при отрицательном значении символа навигационного сообщения также имеют инверсию знака ошибки. Таким образом в перемножителях 1-4 и 1-5 устраняется неоднозначность по знаку сигнала ошибки так как произведение двух отрицательных переменных будет иметь положительное значение. В сумматоре 6 происходит сложение сигналов ошибки, полученных при обработке сигналов на разных поднесущих частотах, благодаря чему увеличивается соотношение «сигнал/шум» на выходе устройства. Результирующий сигнал с выхода сумматора 4 подается на управляющий вход генератора дальномерного кода 5 для синхронизации по времени опорного сигнала дальномерного кода с входным сигналом. Таким образом происходит слежение за задержкой входного сигнала устройства. Вычисленное время задержки имеет точность, достаточную для работы схемы слежения за фазой, в которой производится декодирование навигационного сообщения. Сигнал на выходе устройства свободен от влияния навигационного сообщения. Сигнал с третьего выхода генератора дальномерного кода в установившемся режиме имеет достаточный уровень синхронизации по времени для его использования в схеме слежения за фазой в качестве опорного для декодирования навигационного сообщения.
Изобретение относится к области радиотехники и может быть использовано в приемниках глобальных навигационных спутниковых систем, использующих широкополосные сигналы с модуляцией на поднесущих частотах (BOC-сигналы). Технический результат изобретения заключается в повышении точности слежения за задержкой сигнала. Результат достигается за счет когерентной обработки новых навигационных сигналов с модуляцией на поднесущих частотах и представления их как суммы двух более простых сигналов. 1 ил.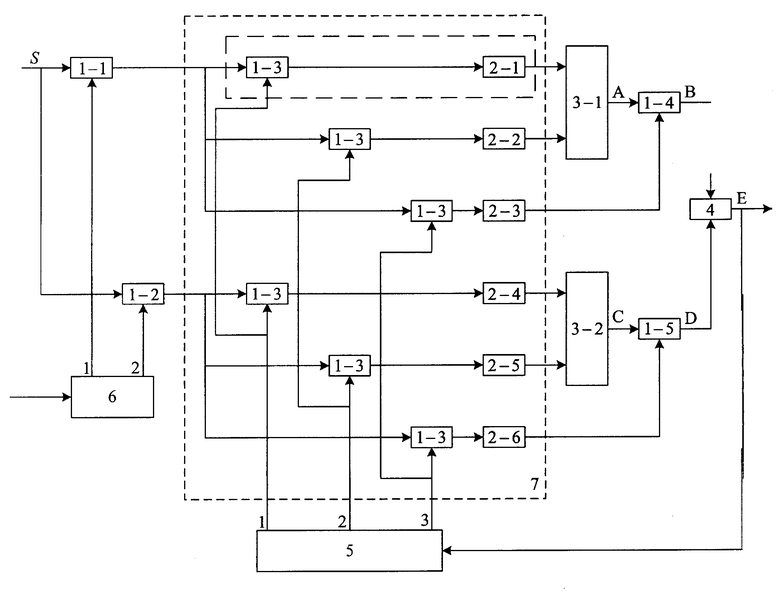
Устройство для обработки навигационных сигналов глобальных навигационных спутниковых систем, содержащее первый и второй перемножители сигналов, первые входы которых объединены и являются входом устройства, управляемый по частоте генератор опорных сигналов, первый и второй выходы которого соединены со вторыми входами первого и второго перемножителей сигналов соответственно, шестиканальный коррелятор, каждый из каналов которого содержит последовательно соединенные перемножитель сигналов и интегратор, выходы интеграторов являются соответствующими выходами шестиканального коррелятора, генератор дальномерного кода, а также первое вычитающее устройство и сумматор, отличающееся тем, что дополнительно введены второе вычитающее устройство, третий и четвертый перемножители сигналов, выходы которых соединены с первым и вторым входами сумматора, при этом выход первого перемножителя сигналов соединен с объединенными первыми входами перемножителей сигналов первого, второго и третьего каналов шестиканального коррелятора, выход второго перемножителя сигналов соединен с объединенными первыми входами перемножителей сигналов четвертого, пятого и шестого каналов шестиканального коррелятора, генератор дальномерного кода выполнен с тремя выходами, первый выход которого соединен с объединенными входами перемножителей сигналов первого и четвертого каналов шестиканального коррелятора, второй выход генератора дальномерного кода соединен с объединенными входами перемножителей сигналов второго и пятого каналов шестиканального коррелятора, третий выход генератора дальномерного кода соединен с объединенными входами перемножителей сигналов третьего и шестого каналов шестиканального коррелятора, выходы интегратора первого канала и выход интегратора второго канала шестиканального коррелятора соединены соответственно с первым и вторым входами первого вычитающего устройства, выход которого соединен с первым входом третьего перемножителя сигналов, выходы интеграторов четвертого и пятого каналов шестиканального коррелятора соединены с первым и вторым входами второго вычитающего устройства соответственно, а выход - с первым входом четвертого перемножителя сигналов, выходы интеграторов третьего и шестого каналов шестиканального коррелятора соединены соответственно со вторыми входами третьего и четвертого перемножителей сигналов, выход сумматора соединен с управляющим входом генератора дальномерного кода и является выходом всего устройства.
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ НАВИГАЦИОННЫХ СИГНАЛОВ ГЛОНАСС, GPS И ГАЛИЛЕО | 2010 |
|
RU2435307C1 |
| АРХИТЕКТУРА ОБРАБОТКИ СИГНАЛОВ В ПРИЕМНИКЕ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2006 |
|
RU2417382C2 |
| Универсальный съемник | 1961 |
|
SU155151A1 |
| УСТРОЙСТВО ДЛЯ ОДНОВРЕМЕННОГО ПРИЕМА СИГНАЛОВ РАЗЛИЧНЫХ СИСТЕМ СПУТНИКОВОЙ НАВИГАЦИИ | 2015 |
|
RU2611069C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРИЕМА РАДИОНАВИГАЦИОННОГО СИГНАЛА С МОДУЛЯЦИЕЙ С БИНАРНОЙ СМЕЩЕННОЙ НЕСУЩЕЙ | 2007 |
|
RU2446412C2 |
| US 8149897 B2, 2012.04.03 | |||
| US 8111735 B2, 2012.02.07. | |||

