Изобретение относится к области радионавигации и предназначено для точного определении вектора состояния (пространственных координат, составляющих вектора скорости и угловой ориентации) различных потребителей по сигналам спутниковых радионавигационных систем (СРНС).
Известен приемник сигналов спутниковой радионавигационной системы GPS, описанный в патенте США №5101356, МПК6 G06F 15/50, приоритет 31.03.1992 г. Приемник сигналов спутниковых радионавигационных систем содержит три антенны, разнесенные в пространстве, три GPS-приемника, фазовый компаратор, блок памяти, вычислитель и дисплей, выход каждой из трех антенн соединен с выходом одного из трех GPS-приемников, первый выход первого GPS-приемника и выходы второго и третьего GPS-приемников соединены соответственно с первым, вторым и третьим выходами фазового компаратора, второй выход первого GPS-приемника соединен с первым входом вычислителя, выход фазового компаратора соединен с вторым входом вычислителя, выход блока памяти соединен с третьим входом вычислителя, первый выход вычислителя соединен с четвертым входом фазового компаратора, первый выход вычислителя соединен с входом дисплея.
Наиболее близким к предлагаемому изобретению является цифровой приемник сигналов спутниковых радионавигационных систем, описанный статье “Flexible Architecture for Space Navigation”, ION GNSS 18th International Meeting of the Satellite Division, 2005, Fig.13. Цифровой приемник содержит N антенн, разнесенных в пространстве, N-канальный радиоприемный блок, m многоканальных корреляторов, где m - число принимаемых навигационных сигналов, m блоков оценки параметров принимаемых навигационных сигналов, инерциальный навигационный блок, навигационный фильтр, вычислитель, блок формирования сигналов управления задержкой дальномерных кодов и опорными частотами для опорных сигналов многоканального коррелятора, блок формирования опорных сигналов многоканального коррелятора. Антенны цифрового приемника предназначены для приема сигналов, излучаемых m навигационными спутниками СРНС, находящихся в зоне радиовидимости. Выходы N антенн соединены с соответствующими входами N-канального радиоприемного блока, в котором осуществляется усиление принятых сигналов, понижение частоты несущего колебания, предварительная частотная селекция от помех и преобразование входной смеси сигналов и помех в цифровую форму. С выходов N-канального радиоприемного блока цифровые коды поступают на сигнальные входы всех m многоканальных корреляторов, каждый из которых настроен на прием одного из m навигационных сигналов, принятого каждой из N антенн, и имеет 6N выходов, на которых формируются сигналы: синфазный, квадратурный, синфазный опережающий, квадратурный опережающий, синфазный запаздывающий, квадратурный запаздывающий для обрабатываемого сигнала, принятого каждой из N антенн. 6N выходных сигналов каждого из m многоканальных корреляторов поступают на соответствующий блок оценки параметров принимаемого навигационного сигнала, каждый из которых имеет 5N выходов, на которых формируются оценки псевдофазы φ, производной псевдофазы φ, второй производной псевдофазы φ, псевдодальности R, ускорения а для обрабатываемого сигнала, принятого каждой из N антенн. Сигналы с выходов всех m блоков оценки параметров принимаемых навигационных сигналов и сигналы с выхода инерциального навигационного блока поступают на навигационный фильтр, который предназначен для совместной обработки данных, полученных от спутниковой и инерциальной навигационных систем. На выходе навигационного фильтра формируются сглаженные оценки псевдодальностей, псевдофаз, производных псевдофаз, псевдодальностей для m навигационных сигналов, которые подаются в вычислитель. В вычислителе рассчитываются оценки координат, составляющих вектора скорости, углов ориентации объекта (в той или иной системе координат), матрицы направляющих косинусов и уточненные оценки псевдодальностей и псевдофаз на все навигационные спутники, сигналы которых обрабатываются в цифровом приемнике. С первого выхода вычислителя рассчитанные оценки координат передаются потребителю. Со второго выхода вычислителя рассчитанные составляющих вектора скорости передаются потребителю. С третьего выхода вычислителя рассчитанные оценки углов ориентации объекта передаются потребителю. С третьего выхода вычислителя уточненные оценки задержек и псевдо фаз для всех навигационных спутников, сигналы которых обрабатываются в цифровом приемнике, поступают в блок формирования сигналов управления задержкой дальномерных кодов и опорными частотами для опорных сигналов многоканального коррелятора, с выхода которого сформированные сигналы управления подаются в блок формирования опорных сигналов многоканального коррелятора. На выходах блока формирования опорных сигналов многоканального коррелятора формируются следующие опорные сигналы для каждого из m многоканальных корреляторов: дальномерный код, опережающий дальномерный код, запаздывающий дальномерный код, синусоидальное и косинусоидальное гармонические колебания соответствующей частоты. Сформированные опорные сигналы подаются на входы опорных сигналов соответствующих многоканальных корреляторов.
Однако в таком цифровом приемнике сигналов СРНС осуществляется слежение за фазами навигационных сигналов, что ограничивает характеристики помехоустойчивости и точности определения углов ориентации объекта.
Техническим результатом изобретения является повышение помехоустойчивости и точности навигационного обеспечения потребителя за счет использования комбинированной когерентно-некогерентной обработки сигналов.
Сущность изобретения поясняется чертежами, где на фиг.1 представлена функциональная схема цифрового приемника сигналов спутниковых радионавигационных систем, на фиг.2 представлена функциональная схема блока оценки параметров принимаемых навигационных сигналов, на фиг.3 представлена функциональная схема дискриминатора разности фаз.
Цифровой приемник сигналов спутниковых радионавигационных систем содержит первую антенну 1, вторую антенну 2, третью антенну 3, 3-канальный радиоприемный блок 4, каждый их трех входов которого соединен с выходом одной из антенн (первый с первым, второй со вторым, третий с третьим), 12 идентичных многоканальных корреляторов 5…16, первый выход 3-канального радиоприемного блока 4 соединен с первыми входами каждого из 12-ти многоканальных корреляторов 5…16, второй выход 3-канального радиоприемного блока 4 соединен со вторыми входами каждого из 12-ти многоканальных корреляторов 5…16, третий выход 3-канального радиоприемного блока 4 соединен с третьими входами каждого из 12-ти многоканальных корреляторов 5…16, каждый из 12-ти многоканальных корреляторов 5…16 имеет 18 выходов, 12 идентично выполненных блоков оценки параметров принимаемых навигационных сигналов 17…28, каждый из которых имеет 18 входов и 9 выходов, 18 входов каждого из 12-ти блоков оценки параметров принимаемых навигационных сигналов 17…28 соединены с соответствующими выходами (i-й выход с i-м входом) одного из 12-ти многоканальных корреляторов 17…28 (18 выходов блока 5 с 18 входами блока 17, 18 выходов блока 6 с 18 входами блока 18, …, 18 выходов блока 16 с 18 входами блока 28), вычислитель 29 с 84 входами, каждый из которых соединен с одним из 7-и выходов одного из 12-ти блоков оценки параметров принимаемых навигационных сигналов 17…28 (84 входов вычислителя образуют 12 групп по 7 входов, каждая группа соединена с выходами одного из 12-ти блоков оценки параметров принимаемых навигационных сигналов: первый вход с первым выходом, второй со вторым, третий с третьим, четвертый с четвертым, пятый с пятым, шестой с шестым, седьмой вход с девятым выходом), три выхода вычислителя являются выходами цифрового приемника сигналов спутниковых радионавигационных систем, блок формирования опорных сигналов многоканального коррелятора 30 с входами, объединенными в 12 групп по 4 входа, каждый из которых соединен с одним из 4-х выходов (первый выход в группе с первым выходом, второй выход в группе со вторым, третий выход в группе с восьмым выходом и четвертый выход в группе с седьмым выходом) одного из 12-ти блоков оценки параметров принимаемых навигационных сигналов 17…28, и с 18×12 выходами, объединенных в 12 групп по 18 выходов, при этом 18 выходов каждой группы соединены с 18-ю входами (с номерами 4…21) одного из 12-ти многоканальных корреляторов 5…16.
Каждый из 12-ти блоков оценки параметров принимаемых навигационных сигналов 17…28 содержит последовательно соединенные частотный дискриминатор 31 и первый сглаживающий фильтр 32, выход которого соединен с первым выходом блока оценки параметров принимаемых навигационных сигналов, последовательно соединенные первый дискриминатор задержки 33 и второй сглаживающий фильтр 34, выход которого соединен со вторым выходом блока оценки параметров принимаемых навигационных сигналов, последовательно соединенные первый дискриминатор разности фаз 35 и третий сглаживающий фильтр 36, первый выход которого соединен с третьим выходом блока оценки параметров принимаемых навигационных сигналов, последовательно соединенные второй дискриминатор задержки 37 и четвертый сглаживающий фильтр 38, выход которого соединен с четвертым выходом блока оценки параметров принимаемых навигационных сигналов, последовательно соединенные второй дискриминатор разности фаз 39 и пятый сглаживающий фильтр 40, первый выход которого соединен с пятым выходом блока оценки параметров принимаемых навигационных сигналов, последовательно соединенные третий дискриминатор задержки 41 и шестой сглаживающий фильтр 42, выход которого соединен с шестым выходом блока оценки параметров принимаемых навигационных сигналов, первый блок вычитания 43, первый (суммарный) вход которого соединен с выходом первого сглаживающего фильтра 32, его второй (разностный) вход соединен со вторым выходом третьего сглаживающего фильтра 36, а его выход соединен со вторым входом четвертого сглаживающего фильтра 38 и седьмым выходом блока оценки параметров принимаемых навигационных сигналов, второй блок вычитания 44, первый (суммарный) вход которого соединен с выходом первого сглаживающего фильтра 32, его второй (разностный) вход соединен со вторым выходом пятого сглаживающего фильтра 40, а его выход соединен со вторым входом шестого сглаживающего фильтра 42 и восьмым выходом блока оценки параметров принимаемых навигационных сигналов, последовательно соединенные блок выделения цифровой информации 45 и блок выделения эфемерид 46, выход которого соединен с девятым выходом блока оценки параметров принимаемых навигационных сигналов, первый и второй входы частотного дискриминатора 31 соединены соответственно с первым и вторым входами блока оценки параметров принимаемых навигационных сигналов, первый, второй, третий и четвертый входы первого дискриминатора задержки 33 соединены соответственно с третьим, четвертым, пятым и шестым входами блока оценки параметров принимаемых навигационных сигналов, первый, второй, третий и четвертый входы первого дискриминатора разности фаз 35 соединены соответственно с первым, вторым, седьмым и восьмым входами блока оценки параметров принимаемых навигационных сигналов, первый, второй, третий и четвертый входы второго дискриминатора задержки 37 соединены соответственно с девятым, десятым, одиннадцатым и двенадцатым входами блока оценки параметров принимаемых навигационных сигналов, первый, второй, третий и четвертый входы второго дискриминатора разности фаз 39 соединены соответственно с первым, вторым, тринадцатым и четырнадцатым входами блока оценки параметров принимаемых навигационных сигналов, первый, второй, третий и четвертый входы третьего дискриминатора задержки 41 соединены соответственно с пятнадцатым, шестнадцатым, семнадцатым и восемнадцатым входами блока оценки параметров принимаемых навигационных сигналов, первый выход третьего сглаживающего фильтра 36 соединен с пятым входом первого дискриминатора разности фаз 37, первый выход пятого сглаживающего фильтра 40 соединен с пятым входом второго дискриминатора разности фаз 39; первый и второй входы блока выделения цифровой информации 45 соединены соответственно с первым и вторым входами блока оценки параметров принимаемых навигационных сигналов.
Каждый из дискриминаторов разности фаз 35 и 39 содержит последовательно соединенные первый перемножитель 47, первый сумматор 48 и второй перемножитель 49, третий перемножитель 50, выход которого соединен со вторым входом первого сумматора 48, последовательно соединенные четвертый перемножитель 51, третий блок вычитания 52, пятый перемножитель 53 и четвертый блок вычитания 54, второй (разностный) вход которого соединен с выходом второго перемножителя 49, а его выход является выходом дискриминатора разности фаз, шестой перемножитель 55, выход которого соединен с вторым (разностным) входом третьего блока вычитания 52, последовательно соединенные умножитель на два 56 и блок вычисления синуса 57, выход которого соединен со вторым входом второго перемножителя 49, блок вычисления косинуса 58, вход которого соединен с выходом умножитель на два 56, а выход соединен со вторым входом пятого перемножителя 53, первый вход дискриминатора разности фаз соединен с первыми входами первого перемножителя 47 и четвертого перемножителя 51, второй вход дискриминатора разности фаз соединен с первыми входами третьего перемножителя 50 и шестого перемножителя 55, третий вход дискриминатора разности фаз соединен со вторыми входами первого перемножителя 47 и шестого перемножителя 55, четвертый вход дискриминатора разности фаз соединен со вторыми входами третьего перемножителя 50 и четвертого перемножителя 51, пятый вход дискриминатора разности фаз соединен с входом умножителя на два 56.
Цифровой приемник сигналов спутниковых радионавигационных систем работает следующим образом.
Антенны 1, 2 и 3 разнесены в пространстве и обеспечивают прием m сигналов, излучаемых навигационными спутниками спутниковой радионавигационной системы (СРНС), например ГЛОНАСС. Обычно m=8..10. В цифровом приемнике сигналов спутниковых радионавигационных систем используются антенны с полусферической диаграммой направленности и правосторонней круговой поляризацией. В 3-канальном радиоприемном блоке 4 проводится раздельная обработка сигналов, поступивших с выходов каждой из 3-х антенн, заключающаяся в усилении сигналов, предварительной частотной селекции от помех, перенос сигналов на более низкую промежуточную частоту и преобразование входной смеси сигналов и помех в цифровую форму на промежуточной частоте, так что на трех выходах 3-канального радиоприемного блока 4 формируются три цифровых сигнала u4,1,k, u4,2,k, u4,3,k (схема одного канала типового приемника приведена, например, в книге «ГЛОНАСС. Принципы построения и функционирования» / Под ред. А.И.Перова, В.Н.Харисова. Изд-во Радиотехника, 2010, рис.13.4).
Цифровые сигналы u4,1,k, u4,2,k, u4,3,k с выходов 3-канального радиоприемного блока 4 поступают на соответствующие входы каждого из m идентичных многоканальных корреляторов 5…16 (схема типового коррелятора приведена, например, в книге «ГЛОНАСС. Принципы построения и функционирования» / Под ред. А.И.Перова, В.Н.Харисова. Изд-во Радиотехника, 2010, рис.13.7), в каждом из которых для одного из 12-ти принятых сигналов СРНС (в разных корреляторах ведется обработка для разных сигналов СРНС) вычисляются 18 корреляционных сумм произведений цифровых отсчетов входных сигналов u4,1,k, u4,2,k, u4,3,k с опорными сигналами, поступающими с входов 4…21 данного многоканального коррелятора. Все многоканальные корреляторы 5…16 идентичны по структуре, и каждый из них работает следующим образом. Отсчеты входных сигналов u4,1,k, u4,2,k, u4,3,k поступают на первый, второй и третий входы многоканального коррелятора, например 5 (предназначенного для обработки первого навигационного сигнала), с соответствующих выходов 3-канального радиоприемного блока 4. На входы с 4 по 21 многоканального коррелятора 5 с блока формирования опорных сигналов многоканального коррелятора 30 поступают отсчеты 18-ти опорных сигналов, которые состоят из трех групп по шесть сигналов. Каждая из трех групп опорных сигналов предназначена для обработки входных сигналов одной из трех антенн (например, с номером j,  ) и включает шесть опорных сигналов:
) и включает шесть опорных сигналов:
1) первая группа опорных сигналов, используемая для обработки сигнала u4,1,k, включает опорные сигналы  ,
,
2) вторая группа опорных сигналов, используемая для обработки сигнала u4,2,k, включает опорные сигналы  ,
,
3) третья группа опорных сигналов, используемая для обработки сигнала u4,3,k, включает опорные сигналы  .
.
На выходах с первого по восемнадцатый многоканального коррелятора 5 формируются следующие сигналы:
1) центральный синфазный для первого навигационного сигнала, принятого 1-й антенной
 ,
,
поступает на 1-й выход многоканального коррелятора 5, где N - число накапливаемых в корреляторе отсчетов,
2) центральный квадратурный для первого навигационного сигнала, принятого 1-й антенной
 ,
,
поступает на 2-й выход многоканального коррелятора 5,
3) опережающий синфазный для первого навигационного сигнала, принятого 1-й антенной
 ,
,
поступает на 3-й выход многоканального коррелятора 5,
4) опережающий квадратурный для первого навигационного сигнала, принятого 1-й антенной
 ,
,
поступает на 4-й выход многоканального коррелятора 5,
5) запаздывающий синфазный для первого навигационного сигнала, принятого 1-й антенной
 ,
,
поступает на 5-й выход многоканального коррелятора 5,
6) запаздывающий квадратурный для первого навигационного сигнала, принятого 1-й антенной
 ,
,
поступает на 6-й выход многоканального коррелятора 5,
7) центральный синфазный для первого навигационного сигнала, принятого 2-й антенной
поступает на 7-й выход многоканального коррелятора 5,
8) центральный квадратурный для первого навигационного сигнала, принятого 2-й антенной
поступает на 8-й выход многоканального коррелятора 5,
9) опережающий синфазный для первого навигационного сигнала, принятого 2-й антенной
поступает на 9-й выход многоканального коррелятора 5,
10) опережающий квадратурный для первого навигационного сигнала, принятого 2-й антенной
поступает на 10-й выход многоканального коррелятора 5,
11) запаздывающий синфазный для первого навигационного сигнала, принятого 2-й антенной
поступает на 11-й выход многоканального коррелятора 5,
12) запаздывающий квадратурный для первого навигационного сигнала, принятого 2-й антенной
поступает на 12-й выход многоканального коррелятора 5,
13) центральный синфазный для первого навигационного сигнала, принятого 3-й антенной
поступает на 13-й выход многоканального коррелятора 5,
14) центральный квадратурный для первого навигационного сигнала, принятого 3-й антенной
поступает на 14-й выход многоканального коррелятора 5,
15) опережающий синфазный для первого навигационного сигнала, принятого 3-й антенной
поступает на 15-й выход многоканального коррелятора 5,
16) опережающий квадратурный для первого навигационного сигнала, принятого 3-й антенной
поступает на 16-й выход многоканального коррелятора 5,
17) запаздывающий синфазный для первого навигационного сигнала, принятого 3-й антенной
поступает на 17-й выход многоканального коррелятора 5,
18) запаздывающий квадратурный для первого навигационного сигнала, принятого 3-й антенной
поступает на 18-й выход многоканального коррелятора 5.
Сигналы с выходов с первого по восемнадцатый каждого из многоканальных корреляторов 5…16 поступают на соответствующие входы (с первого по восемнадцатый) соответствующего блока оценки параметров принимаемых навигационных сигналов (одного из 17…28) (18 выходов блока 5 с 18 входами блока 17, 18 выходов блока 6 с 18 входами блока 18,…,18 выходов блока 16 с 18 входами блока 28).
В 12-ти блоках оценки параметров принимаемых навигационных сигналов 17…28 формируются оценки параметров 12-ти принятых навигационных сигналов (в каждом блоке оценки параметров принимаемых навигационных сигналов рассчитываются оценки для одного из принятых сигналов и в разных блоках оценки параметров принимаемых навигационных сигналов рассчитываются параметры разных сигналов).
Все блоки оценки параметров принимаемых навигационных сигналов 17…28 идентичны по структуре и работают следующим образом. Рассмотрим, например, работу блока оценки параметров принимаемых навигационных сигналов 17. В данном блоке 17 формируются следующие оценки параметров принятого первого навигационного сигнала:
1) оценка доплеровского смещения частоты первого навигационного сигнала ωд,1, принятого первой антенной 1, которую обозначим  ;
;
2) оценка задержки первого навигационного сигнала τ1, принятого первой антенной 1, которую обозначим  ;
;
3) оценка разности фаз Δφ1-2 первых навигационных сигналов, принятых антеннами 1 и 2, которую обозначим  ;
;
4) оценка задержки первого навигационного сигнала τ2, принятого второй антенной 2, которую обозначим  ;
;
5) оценка разности фаз Δφ1-3 первых навигационных сигналов, принятых антеннами 1 и 3, которую обозначим  ;
;
6) оценка задержки первого навигационного сигнала τ3, принятого третьей антенной 3, которую обозначим  ;
;
7) оценка разности Δωд,1-2 между доплеровским смещением частоты ωд,1 сигнала, принятого первой антенной 1, и поправкой доплеровского смещения δωд1, формируемой на втором выходе третьего сглаживающего фильтра 36 и обусловленной вращением антенны 2 относительно антенны 1, которую обозначим  ;
;
8) оценка разности Δωд,1-3 между доплеровским смещением частоты ωд1 сигнала, принятого первой антенной 1, и поправкой доплеровского смещения δωд2, формируемой на втором выходе пятого сглаживающего фильтра 40 и обусловленной вращением антенны 3 относительно антенны 1, которую обозначим  ;
;
9) эфемеридные данные: вектор координат х1 и вектор скорости V1 первого навигационного спутника, сигнал которого обрабатывается в данном блоке оценки параметров принимаемых сигналов, которые обозначим как ef1.
Рассмотрим работу блока оценки параметров принимаемых сигналов 17.
Сигналы IP;1 и QP;1 соответственно с первого и второго входов блока оценки параметров принимаемых сигналов 17 поступают на первый и второй вход частотного дискриминатора 31. На выходе частотного дискриминатора 31 формируется сигнал (см., например, книгу «ГЛОНАСС. Принципы построения и функционирования» / Под ред. А.И.Перова, В.Н.Харисова. Изд-во Радиотехника, 2010, п.П6.4, стр.262)
 ,
,
где  - значение входного сигнала IP;1 в предыдущий такт работы,
- значение входного сигнала IP;1 в предыдущий такт работы,  - значение входного сигнала QP;1 в предыдущий такт работы.
- значение входного сигнала QP;1 в предыдущий такт работы.
Сигнал u31 пропорционален разности между истинным значением доплеровского смещения частоты и его оценочным значением, формирующимся в блоке оценки параметров принимаемых навигационных сигналов 17.
Сигналы IE;1, QE;1, IL;1, QL;1 соответственно с третьего, четвертого, пятого и шестого входов оценки параметров принимаемых навигационных сигналов 17 поступают соответственно на первый, второй, третий и четвертый входы первого дискриминатора задержки 33, на выходе которого формируется сигнал (см., например, книгу «ГЛОНАСС. Принципы построения и функционирования» / Под ред. А.И.Перова, В.Н.Харисова. Изд-во Радиотехника, 2010, п.6.3.4.2, стр.154):
 ,
,
который пропорционален разности между истинным значением задержки сигнала, принятого первой антенной, и его оценочным значением, формирующимся в блоке оценки параметров принимаемых навигационных сигналов 17.
Сигналы IE;2, QE;2, IL;2, QL;2 соответственно с девятого, десятого, одиннадцатого и двенадцатого входов блока оценки параметров принимаемых навигационных сигналов 17 поступают соответственно на первый, второй, третий и четвертый входы второго дискриминатора задержки 37, на выходе которого формируется сигнал (см., например, книгу «ГЛОНАСС. Принципы построения и функционирования» / Под ред. А.И.Перова, В.Н.Харисова. Изд-во Радиотехника, 2010, п.6.3.4.2, стр.154):
 ,
,
который пропорционален разности между истинным значением задержки сигнала, принятого второй антенной, и его оценочным значением, формирующимся в блоке оценки параметров принимаемых навигационных сигналов 17.
Сигналы IE;3, QE;3, IL;3, QL;3 соответственно с пятнадцатого, шестнадцатого, семнадцатого и восемнадцатого входов блока оценки параметров принимаемых навигационных сигналов 17 поступают соответственно на первый, второй, третий и четвертый входы третьего дискриминатора задержки 41, на выходе которого формируется сигнал (см., например, книгу «ГЛОНАСС. Принципы построения и функционирования» / Под ред. А.И.Перова, В.Н.Харисова. Изд-во Радиотехника, 2010, п.6.3.4.2, стр.154):
 ,
,
который пропорционален разности между истинным значением задержки сигнала, принятого третьей антенной, и его оценочным значением, формирующимся в блоке оценки параметров принимаемых навигационных сигналов 17.
Первый 35 и второй 39 дискриминаторы разности фаз одинаковы по структуре. Поэтому более подробно рассмотрим структуру первого дискриминатора разности фаз 35. Сигналы IP;1, QP;1, IP;2, QP;2 соответственно с первого, второго, седьмого и восьмого входов блока оценки параметров принимаемых навигационных сигналов 17 поступают соответственно на первый, второй, третий и четвертый входы первого дискриминатора разности фаз 35. На пятый вход первого дискриминатора разности фаз 35 поступает сигнал u36 с первого выхода третьего сглаживающего фильтра 36, величина которого равна оценке разности фаз  сигналов первого спутника, принимаемых 1 и 2 антенной (т.е.
сигналов первого спутника, принимаемых 1 и 2 антенной (т.е.  ), сформированной на предыдущем такте работы следящей системой за разностью фаз Δφ1-2 (включающей блоки 35 и 36). Сигнал IP;1 с первого входа первого дискриминатора разности фаз 35 поступает на первые входы первого 47 и четвертого 51 перемножителей. Сигнал QP;1 со второго входа первого дискриминатора разности фаз 35 поступает на первые входы третьего 50 и шестого 55 перемножителей. Сигнал IP;2 с третьего входа первого дискриминатора разности фаз 35 поступает на вторые входы первого 47 и шестого 55 перемножителей. Сигнал QP;2 с четвертого входа первого дискриминатора разности фаз 35 поступает на вторые входы третьего 50 и четвертого 51 перемножителей. На выходах первого 47, третьего 50, четвертого 51 и шестого 55 перемножителей формируются соответственно сигналы
), сформированной на предыдущем такте работы следящей системой за разностью фаз Δφ1-2 (включающей блоки 35 и 36). Сигнал IP;1 с первого входа первого дискриминатора разности фаз 35 поступает на первые входы первого 47 и четвертого 51 перемножителей. Сигнал QP;1 со второго входа первого дискриминатора разности фаз 35 поступает на первые входы третьего 50 и шестого 55 перемножителей. Сигнал IP;2 с третьего входа первого дискриминатора разности фаз 35 поступает на вторые входы первого 47 и шестого 55 перемножителей. Сигнал QP;2 с четвертого входа первого дискриминатора разности фаз 35 поступает на вторые входы третьего 50 и четвертого 51 перемножителей. На выходах первого 47, третьего 50, четвертого 51 и шестого 55 перемножителей формируются соответственно сигналы
u47=IP;1IP;2, u50=QP;1QP;2,
u51=IP;1QP;2, u55=QP;1IP;2.
На первый вход первого сумматора 48 поступает сигнал u47 с выхода первого перемножителя 47, а на его второй вход поступает сигнал u50 с выхода третьего перемножителя 50, так что на его выходе формируется сигнал
u48=u47+u50=IP;1IP;2+QP;1QP;2.
На первый (суммарный) вход третьего блока вычитания 52 поступает сигнал u51 с выхода четвертого перемножителя 51, а на его второй (разностный) вход поступает сигнал u55 с выхода шестого перемножителя 55, так что на его выходе формируется сигнал
u52=u51-u55=IP;1QP;2-QP;1IP;2.
Сигнал с пятого входа первого дискриминатора разности фаз 35, равный оценочному значению  разности фаз Δφ1-2, формирующемся в блоке оценки параметров принимаемых навигационных сигналов 17, поступает на вход умножителя на два 56, выходной сигнал которого подается на входы блока вычисления синуса 57 и блока вычисления косинуса 58. На выходах блока вычисления синуса 57 и блока вычисления косинуса 58 формируются соответственно сигналы
разности фаз Δφ1-2, формирующемся в блоке оценки параметров принимаемых навигационных сигналов 17, поступает на вход умножителя на два 56, выходной сигнал которого подается на входы блока вычисления синуса 57 и блока вычисления косинуса 58. На выходах блока вычисления синуса 57 и блока вычисления косинуса 58 формируются соответственно сигналы
 ,
,  .
.
На первый вход второго перемножителя 49 поступает сигнал u48 с выхода первого сумматора 48, на его второй вход поступает сигнал u57 с выхода блока вычисления синуса 57, так что на выходе второго перемножителя 49 формируется сигнал
 .
.
На первый вход пятого перемножителя 53 поступает сигнал u52 с выхода третьего блока вычитания 52, на его второй вход поступает сигнал u58 с выхода блока вычисления косинуса 58, так что на выходе пятого перемножителя 53 формируется сигнал
 .
.
На первый (суммарный) вход четвертого блока вычитания 54 поступает сигнал u53 с выхода пятого перемножителя 53, а на его второй (разностный) вход поступает сигнал u49 с выхода второго перемножителя 49. Выходной сигнал четвертого блока вычитания 54 является выходным сигналом первого дискриминатора разности фаз 35, и он пропорционален разности между истинным значением разности фаз Δφ1-2 (первых навигационных сигналов, принятых первой и второй антеннами) и ее оценочным значением , формирующимся в блоке оценки параметров принимаемых навигационных сигналов 17.
Аналогично выходной сигнал второго дискриминатора разности фаз 39 пропорционален разности между истинным значением разности фаз Δφ1-3 (первых навигационных сигналов, принятых первой и третьей антеннами) и ее оценочным значением  , формирующимся в блоке оценки параметров принимаемых навигационных сигналов 17.
, формирующимся в блоке оценки параметров принимаемых навигационных сигналов 17.
Сигнал u31 с выхода частотного дискриминатора 31 поступает на вход первого сглаживающего фильтра 32 (являющегося сглаживающим фильтром второго порядка). Блоки 31, 32 входят в состав следящей системы за доплеровским смещением частоты первого навигационного сигнала. Структуры сглаживающих фильтров следящих систем за доплеровским смещением частоты описаны, например, в книге «ГЛОНАСС. Принципы построения и функционирования» / Под ред. А.И.Перова, В.Н.Харисова. Изд-во Радиотехника, 2010, п.6.3.6.3. На выходе первого сглаживающего фильтра 32 формируется сигнал u32, равный оценке доплеровского смещения частоты, т.е.  . Кроме того, сигнал u32 поступает на первый выход блока оценки параметров принимаемых навигационных сигналов 17, т.е. выходной сигнал
. Кроме того, сигнал u32 поступает на первый выход блока оценки параметров принимаемых навигационных сигналов 17, т.е. выходной сигнал  .
.
Сигнал u33 с выхода первого дискриминатора задержки 33 поступает на вход второго сглаживающего фильтра 34 (являющегося сглаживающим фильтром второго порядка). Блоки 33, 34 входят в состав следящей системы за задержкой первого навигационного сигнала, принятого первой антенной. Структуры сглаживающих фильтров следящих систем за задержкой навигационного сигнала описаны, например, в книге «ГЛОНАСС. Принципы построения и функционирования» / Под ред. А.И.Перова, В.Н.Харисова. Изд-во Радиотехника, 2010, п.6.3.6.2. На выходе второго сглаживающего фильтра 34 формируется сигнал u34, равный оценке задержки первого навигационного сигнала, принятого первой антенной, т.е.  . Кроме того, сигнал u34 поступает на второй выход блока оценки параметров принимаемых навигационных сигналов 17, т.е. выходной сигнал
. Кроме того, сигнал u34 поступает на второй выход блока оценки параметров принимаемых навигационных сигналов 17, т.е. выходной сигнал  .
.
Сигнал u37 с выхода второго дискриминатора задержки 37 поступает на первый вход четвертого сглаживающего фильтра 38. На второй вход четвертого сглаживающего фильтра 38 поступает сигнал u43 с выхода первого блока вычитания 43, пропорциональный оценке доплеровского смещения частоты первого навигационного сигнала, принятого второй антенной. Четвертый сглаживающий фильтр 38 является сглаживающим фильтром второго порядка с поддержкой сигнала первой производной. Блоки 37, 38 входят в состав следящей системы за задержкой первого навигационного сигнала, принятого второй антенной, с поддержкой оценки доплеровской частоты. Структуры сглаживающих фильтров следящих систем за задержкой навигационного сигнала с поддержкой оценки доплеровской частоты описаны, например, в книге Перов А.И. Статистический синтез радиотехнических систем. - М.: Радиотехника, 2003, п.12.2. На выходе четвертого сглаживающего фильтра 38 формируется сигнал u38, равный оценке задержки первого навигационного сигнала, принятого второй антенной, т.е.  . Кроме того, сигнал u38 поступает на четвертый выход блока оценки параметров принимаемых навигационных сигналов 17, т.е. выходной сигнал
. Кроме того, сигнал u38 поступает на четвертый выход блока оценки параметров принимаемых навигационных сигналов 17, т.е. выходной сигнал  .
.
Сигнал 41 с выхода третьего дискриминатора задержки 41 поступает на первый вход шестого сглаживающего фильтра 42.
На второй вход шестого сглаживающего фильтра 42 поступает сигнал u44 с выхода второго блока вычитания 44, пропорциональный оценке доплеровского смещения частоты первого навигационного сигнала, принятого третьей антенной. Шестой сглаживающий фильтр 42 является сглаживающим фильтром второго порядка с поддержкой сигнала первой производной. Блоки 41, 42 входят в состав следящей системы за задержкой первого навигационного сигнала, принятого третьей антенной, с поддержкой оценки доплеровской частоты. Структуры сглаживающих фильтров следящих систем за задержкой навигационного сигнала с поддержкой оценки доплеровской частоты описаны, например, в книге Перов А.И. Статистический синтез радиотехнических систем. - М.: Радиотехника, 2003, п.12.2. На выходе шестого сглаживающего фильтра 42 формируется сигнал u42, равный оценке задержки первого навигационного сигнала, принятого третьей антенной, т.е.  . Кроме того, сигнал u42 поступает на шестой выход блока оценки параметров принимаемых навигационных сигналов 17, т.е. выходной сигнал
. Кроме того, сигнал u42 поступает на шестой выход блока оценки параметров принимаемых навигационных сигналов 17, т.е. выходной сигнал  .
.
Сигнал u35 с выхода первого дискриминатора разности фаз 35 поступает на вход третьего сглаживающего фильтра 36 (являющегося сглаживающим фильтром третьего порядка). Блоки 35, 36 входят в состав следящей системы за разностью фаз Δφ1-2 между первыми навигационными сигналами, принятыми первой и второй антеннами. Структуры сглаживающих фильтров следящих систем за фазой (разностью фаз) навигационного сигнала описаны, например, в книге «ГЛОНАСС. Принципы построения и функционирования» / Под ред. А.И.Перова, В.Н.Харисова. Изд-во Радиотехника, 2010, п.6.3.6.1. На первом выходе третьего сглаживающего фильтра 36 формируется сигнал u36,1, равный оценке разности фаз Δφ1-2 между первыми навигационными сигналами, принятыми первой и второй антеннами, т.е.  . Сигнал u36,1 поступает на третий выход блока оценки параметров принимаемых навигационных сигналов 17, т.е. выходной сигнал
. Сигнал u36,1 поступает на третий выход блока оценки параметров принимаемых навигационных сигналов 17, т.е. выходной сигнал  . На втором выходе третьего сглаживающего фильтра 36 формируется сигнал u36,2, равный оценке производной разности фаз
. На втором выходе третьего сглаживающего фильтра 36 формируется сигнал u36,2, равный оценке производной разности фаз  между первыми навигационными сигналами, принятыми первой и второй антеннами, т.е.
между первыми навигационными сигналами, принятыми первой и второй антеннами, т.е.  .
.
Сигнал u39 с выхода второго дискриминатора разности фаз 39 поступает на вход пятого сглаживающего фильтра 40 (являющегося сглаживающим фильтром третьего порядка). Блоки 39, 40 входят в состав следящей системы за разностью фаз Δφ1-3 между первыми навигационными сигналами, принятыми первой и третьей антеннами. Структура сглаживающих фильтров третьего порядка описана в книге «ГЛОНАСС. Принципы построения и функционирования» / Под ред. А.И.Перова, В.Н.Харисова. Изд-во Радиотехника, 2010, п.16.3, стр.630. На первом выходе пятого сглаживающего фильтра 40 формируется сигнал u40,1, равный оценке разности фаз Δφ1-3 между первыми навигационными сигналами, принятыми первой и третьей антеннами, т.е.  . Сигнал u40,1 поступает на пятый выход блока оценки параметров принимаемых навигационных сигналов 17, т.е. выходной сигнал
. Сигнал u40,1 поступает на пятый выход блока оценки параметров принимаемых навигационных сигналов 17, т.е. выходной сигнал  . На втором выходе пятого сглаживающего фильтра 40 формируется сигнал u40,2, равный оценке производной разности фаз
. На втором выходе пятого сглаживающего фильтра 40 формируется сигнал u40,2, равный оценке производной разности фаз  между первыми навигационными сигналами, принятыми первой и третьей антеннами, т.е.
между первыми навигационными сигналами, принятыми первой и третьей антеннами, т.е.  .
.
На первый (суммарный) вход первого блока вычитания 43 поступает сигнал u32 с выхода первого сглаживающего фильтра 32, равный оценке доплеровского смещения частоты, т.е.  На второй (разностный) вход первого блока вычитания 43 поступает сигнал u36,2 со второго выхода третьего сглаживающего фильтра 36, равный оценке производной разности фаз
На второй (разностный) вход первого блока вычитания 43 поступает сигнал u36,2 со второго выхода третьего сглаживающего фильтра 36, равный оценке производной разности фаз  между первыми навигационными сигналами, принятыми первой и второй антеннами, т.е.
между первыми навигационными сигналами, принятыми первой и второй антеннами, т.е.  . На выходе первого блока вычитания 43 формируется сигнал
. На выходе первого блока вычитания 43 формируется сигнал
 ,
,
который подается на второй вход четвертого сглаживающего фильтра 38 и на седьмой выход блока оценки параметров принимаемых навигационных сигналов 17, т.е. выходной сигнал  .
.
На первый (суммарный) вход второго блока вычитания 44 поступает сигнал u32 с выхода первого сглаживающего фильтра 32, равный оценке доплеровского смещения частоты, т.е.  . На второй (разностный) вход второго блока вычитания 44 поступает сигнал u40,2 с второго выхода пятого сглаживающего фильтра 40, равный оценке производной разности фаз
. На второй (разностный) вход второго блока вычитания 44 поступает сигнал u40,2 с второго выхода пятого сглаживающего фильтра 40, равный оценке производной разности фаз  между первыми навигационными сигналами, принятыми первой и третьей антеннами, т.е.
между первыми навигационными сигналами, принятыми первой и третьей антеннами, т.е.  . На выходе второго блока вычитания 44 формируется сигнал
. На выходе второго блока вычитания 44 формируется сигнал
 ,
,
который подается на второй вход шестого сглаживающего фильтра 42 и на восьмой выход блока оценки параметров принимаемых навигационных сигналов 17, т.е. выходной сигнал  .
.
На первый и второй входы блока выделения цифровой информации 45 поступают сигналы IP;1 и QP;1 соответственно с первого и второго входов блока оценки параметров принимаемых сигналов 17. В блоке выделения цифровой информации 45 осуществляется выделение цифровых данных, передаваемых в первом навигационном сигнале по известному алгоритму, описанному, например, в книге «ГЛОНАСС. Принципы построения и функционирования» / Под ред. А.И.Перова, В.Н.Харисова. Изд-во Радиотехника, 2010, п.13.7.7.
Выделенный поток цифровой данных с выхода блока выделения цифровой информации 45 подается в блок выделения эфемерид 46, в котором выделяются эфемеридные данные ef1 первого навигационного спутника, сигнал которого обрабатывается в данном блоке оценки параметров принимаемых сигналов. Выделение эфемерид из цифровых данных описано, например, в кн. «ГЛОНАСС. Принципы построения и функционирования» / Под ред. А.И.Перова, В.Н.Харисова. Изд-во Радиотехника, 2010, п.11.4. На выходе блока выделения эфемерид 46 формируется выходной сигнал u46=ef1, который подается на девятый выход блока оценки параметров принимаемых навигационных сигналов 17, т.е. выходной сигнал u17;9=ef1.
С выходов 1…6, 9 всех 12-ти блоков оценки параметров принимаемых сигналов 17…28 цифровые сигналы u16+i;s,  и u16+i;9,
и u16+i;9,  подаются на соответствующие входы (число входов 7×12=84) вычислителя 29, где по известным формулам (приведенным, например в книгах: ГЛОНАСС. Принципы построения и функционирования / Под ред. А.И.Перова, В.Н.Харисова. Радиотехника, 2010, А.А.Поваляев «Спутниковые радионавигационные системы: время, показания часов, формирование измерений и определение относительных координат». Радиотехника, 2008) вычисляются координаты потребителя x,y,z в той или иной системе координат, составляющие вектора скорости Vx,Vy,Vz, углы ориентации α,β,γ. Координаты потребителя x,y,z подаются на первый выход вычислителя 2m+5, составляющие вектора скорости Vx,Vy,Vz подаются на его второй выход, а углы ориентации α,β,γ подаются на его третий выход.
подаются на соответствующие входы (число входов 7×12=84) вычислителя 29, где по известным формулам (приведенным, например в книгах: ГЛОНАСС. Принципы построения и функционирования / Под ред. А.И.Перова, В.Н.Харисова. Радиотехника, 2010, А.А.Поваляев «Спутниковые радионавигационные системы: время, показания часов, формирование измерений и определение относительных координат». Радиотехника, 2008) вычисляются координаты потребителя x,y,z в той или иной системе координат, составляющие вектора скорости Vx,Vy,Vz, углы ориентации α,β,γ. Координаты потребителя x,y,z подаются на первый выход вычислителя 2m+5, составляющие вектора скорости Vx,Vy,Vz подаются на его второй выход, а углы ориентации α,β,γ подаются на его третий выход.
В блоке формирования опорных сигналов многоканального коррелятора 30 формируются опорные сигналы для всех m многоканальных корреляторов 5…16. Так, например, для многоканального коррелятора 5 в блоке формирования опорных сигналов многоканального коррелятора 30 формируется 18  опорных сигналов
опорных сигналов  :
:
 , используемого для формирования сигнала u5,1=IP;1 многоканального коррелятора 5; здесь и далее ω1 - номинальная несущая частота первого навигационного сигнала (см. книгу «ГЛОНАСС. Принципы построения и функционирования» / Под ред. А.И.Перова, В.Н.Харисова. Изд-во Радиотехника, 2010, п.11.2.2, табл.11.2); hдк(tk) - функция модуляции дальномерным кодом (см. книгу «ГЛОНАСС, Принципы построения и функционирования» / Под ред. А.И.Перова, В.Н.Харисова. Изд-во Радиотехника, 2010, п.11.3);
, используемого для формирования сигнала u5,1=IP;1 многоканального коррелятора 5; здесь и далее ω1 - номинальная несущая частота первого навигационного сигнала (см. книгу «ГЛОНАСС. Принципы построения и функционирования» / Под ред. А.И.Перова, В.Н.Харисова. Изд-во Радиотехника, 2010, п.11.2.2, табл.11.2); hдк(tk) - функция модуляции дальномерным кодом (см. книгу «ГЛОНАСС, Принципы построения и функционирования» / Под ред. А.И.Перова, В.Н.Харисова. Изд-во Радиотехника, 2010, п.11.3);
 , используемого для формирования сигнала u5,2=QP;1 многоканального коррелятора 5;
, используемого для формирования сигнала u5,2=QP;1 многоканального коррелятора 5;
 , используемого для формирования сигнала u5,3=IE;1 многоканального коррелятора 5;
, используемого для формирования сигнала u5,3=IE;1 многоканального коррелятора 5;
 , используемого для формирования сигнала u5,4=QE;1 многоканального коррелятора 5;
, используемого для формирования сигнала u5,4=QE;1 многоканального коррелятора 5;
 , используемого для формирования сигнала u5,5=IL;1 многоканального коррелятора 5;
, используемого для формирования сигнала u5,5=IL;1 многоканального коррелятора 5;
 , используемого для формирования сигнала u5,6=QL;1 многоканального коррелятора 5;
, используемого для формирования сигнала u5,6=QL;1 многоканального коррелятора 5;
 , используемого для формирования сигнала u5,7=IP;2 многоканального коррелятора 5;
, используемого для формирования сигнала u5,7=IP;2 многоканального коррелятора 5;
 , используемого для формирования сигнала u5,8=QP;2 многоканального коррелятора 5;
, используемого для формирования сигнала u5,8=QP;2 многоканального коррелятора 5;
 , используемого для формирования сигнала u5,9=IE;2 многоканального коррелятора 5;
, используемого для формирования сигнала u5,9=IE;2 многоканального коррелятора 5;
 , используемого для формирования сигнала u5,10=QE;2 многоканального коррелятора 5;
, используемого для формирования сигнала u5,10=QE;2 многоканального коррелятора 5;
 , используемого для формирования сигнала u5,11=IL5;2 многоканального коррелятора 5;
, используемого для формирования сигнала u5,11=IL5;2 многоканального коррелятора 5;
 , используемого для формирования сигнала u5,12=QL;2 многоканального коррелятора 5;
, используемого для формирования сигнала u5,12=QL;2 многоканального коррелятора 5;
 , используемого для формирования сигнала u5,13=IP;3 многоканального коррелятора 5;
, используемого для формирования сигнала u5,13=IP;3 многоканального коррелятора 5;
 , используемого для формирования сигнала u5,14=QP;3 многоканального коррелятора 5;
, используемого для формирования сигнала u5,14=QP;3 многоканального коррелятора 5;
 , используемого для формирования сигнала u5,15=IE;3 многоканального коррелятора 5;
, используемого для формирования сигнала u5,15=IE;3 многоканального коррелятора 5;
 , используемого для формирования сигнала u5,16=QE;3 многоканального коррелятора 5;
, используемого для формирования сигнала u5,16=QE;3 многоканального коррелятора 5;
 , используемого для формирования сигнала u5,17=IL;3 многоканального коррелятора 5;
, используемого для формирования сигнала u5,17=IL;3 многоканального коррелятора 5;
 , используемого для формирования сигнала u5,18=QL;3 многоканального коррелятора 5.
, используемого для формирования сигнала u5,18=QL;3 многоканального коррелятора 5.
Аналогично в блоке формирования опорных сигналов многоканального коррелятора 30 на выходах с 19 по 18×12 формируются опорные сигналы для всех других многоканальных корреляторов 6…16.
Использование изобретения позволяет повысить помехоустойчивость и точность навигационного обеспечения потребителя за счет использования комбинированной когерентно-некогерентной обработки сигналов.
Изобретение относится к области радионавигации и предназначено для точного определения пространственных координат, составляющих вектора скорости и угловой ориентации различных потребителей по сигналам спутниковых радионавигационных систем (СРНС). Технический результат заключается в повышении помехоустойчивости и точности навигационного обеспечения потребителя за счет использования комбинированной когерентно-некогерентной обработки сигналов. Для этого цифровой приемник содержит антенны, 3-канальный радиоприемный блок, 12 идентичных многоканальных корреляторов, 12 идентично выполненных блоков оценки параметров принимаемых навигационных сигналов, вычислитель, блок формирования опорных сигналов многоканального коррелятора. Каждый из 12-ти блоков оценки параметров принимаемых навигационных сигналов содержит частотный дискриминатор, сглаживающие фильтры, дискриминаторы задержки, дискриминаторы разности фаз, блоки вычитания, блок выделения цифровой информации, блок выделения эфемерид. Каждый из дискриминаторов разности фаз содержит перемножители, сумматоры, блоки вычитания, умножитель на два, блок вычисления синуса, блок вычисления косинуса. 3 ил.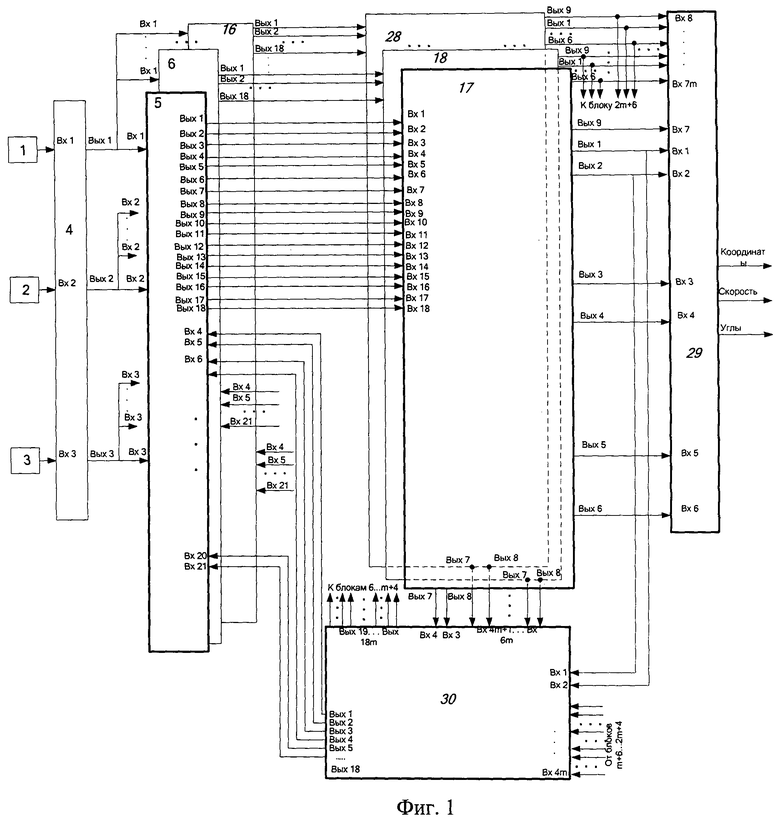
Цифровой приемник сигналов спутниковых радионавигационных систем, содержащий первую антенну, вторую антенну, третью антенну, 3-канальный радиоприемный блок, каждый из трех входов которого соединен с выходом одной из антенн, 12 многоканальных корреляторов, 12 блоков оценки параметров принимаемых навигационных сигналов, вычислитель, три выхода которого являются выходами цифрового приемника сигналов спутниковых радионавигационных систем, блок формирования опорных сигналов многоканального коррелятора с 216 выходами, объединенными в 12 групп по 18 выходов, и 18 выходов каждой группы соединены 18 опорными входами (с номерами 4…21) одного из 12 многоканальных корреляторов, первый выход 3-канального радиоприемного блока соединен с первыми входами каждого из 12 многоканальных корреляторов, второй выход 3-канального радиоприемного блока соединен со вторыми входами каждого из 12 многоканальных корреляторов, третий выход 3-канального радиоприемного блока соединен с третьими входами каждого из 12 многоканальных корреляторов, выходы с первого по восемнадцатый каждого из 12 многоканальных корреляторов соединены соответственно (i-й с i-м) с входами с первого по восемнадцатый одного из 12 блоков оценки параметров принимаемых навигационных сигналов, отличающийся тем, что каждый из 12 блоков оценки параметров принимаемых навигационных сигналов содержит последовательно соединенные частотный дискриминатор и первый сглаживающий фильтр, выход которого соединен с первым выходом блока оценки параметров принимаемых навигационных сигналов, последовательно соединенные первый дискриминатор задержки и второй сглаживающий фильтр, выход которого соединен со вторым выходом блока оценки параметров принимаемых навигационных сигналов, последовательно соединенные первый дискриминатор разности фаз и третий сглаживающий фильтр, первый выход которого соединен с третьим выходом блока оценки параметров принимаемых навигационных сигналов, последовательно соединенные второй дискриминатор задержки и четвертый сглаживающий фильтр, выход которого соединен с четвертым выходом блока оценки параметров принимаемых навигационных сигналов, последовательно соединенные второй дискриминатор разности фаз и пятый сглаживающий фильтр, первый выход которого соединен с пятым выходом блока оценки параметров принимаемых навигационных сигналов, последовательно соединенные третий дискриминатор задержки и шестой сглаживающий фильтр, выход которого соединен с шестым выходом блока оценки параметров принимаемых навигационных сигналов, первый блок вычитания, первый (суммарный) вход которого соединен с выходом первого сглаживающего фильтра, его второй (разностный) вход соединен со вторым выходом третьего сглаживающего фильтра, а его выход соединен со вторым входом четвертого сглаживающего фильтра и седьмым выходом блока оценки параметров принимаемых навигационных сигналов, второй блок вычитания, первый (суммарный) вход которого соединен с выходом первого сглаживающего фильтра, его второй (разностный) вход соединен со вторым выходом пятого сглаживающего фильтра, а его выход соединен со вторым входом шестого сглаживающего фильтра и восьмым выходом блока оценки параметров принимаемых навигационных сигналов, последовательно соединенные блок выделения цифровой информации и блок выделения эфемерид, выход которого соединен с девятым выходом блока оценки параметров принимаемых навигационных сигналов, первый и второй входы блока выделения цифровой информации соединены соответственно с первым и вторым входами блока оценки параметров принимаемых навигационных сигналов, первый и второй входы частотного дискриминатора соединены соответственно с первым и вторым входами блока оценки параметров принимаемых навигационных сигналов, первый, второй, третий и четвертый входы первого дискриминатора задержки соединены соответственно с третьим, четвертым, пятым и шестым входами блока оценки параметров принимаемых навигационных сигналов, первый, второй, третий и четвертый входы первого дискриминатора разности фаз соединены соответственно с первым, вторым, седьмым и восьмым входами блока оценки параметров принимаемых навигационных сигналов, первый, второй, третий и четвертый входы второго дискриминатора задержки соединены соответственно с девятым, десятым, одиннадцатым и двенадцатым входами блока оценки параметров принимаемых навигационных сигналов, первый, второй, третий и четвертый входы второго дискриминатора разности фаз соединены соответственно с первым, вторым, тринадцатым и четырнадцатым входами блока оценки параметров принимаемых навигационных сигналов, первый, второй, третий и четвертый входы третьего дискриминатора задержки соединены соответственно с пятнадцатым, шестнадцатым, семнадцатым и восемнадцатым входами блока оценки параметров принимаемых навигационных сигналов, первый выход третьего сглаживающего фильтра соединен с пятым входом первого дискриминатора разности фаз, первый выход пятого сглаживающего фильтра соединен с пятым входом второго дискриминатора разности фаз, вычислитель имеет 84 входов, первый, второй, третий, четвертый, пятый, шестой и девятый выходы каждого из 12 блоков оценки параметров принимаемых навигационных сигналов соединены с соответствующими входами вычислителя, первый, второй, седьмой и восьмой выходы каждого из 12 блоков оценки параметров принимаемых навигационных сигналов соединены с соответствующими входами блока формирования опорных сигналов многоканального коррелятора, каждый из дискриминаторов разности фаз содержит последовательно соединенные первый перемножитель, первый сумматор и второй перемножитель, третий перемножитель, выход которого соединен со вторым входом первого сумматора, последовательно соединенные четвертый перемножитель, третий блок вычитания, пятый перемножитель и четвертый блок вычитания, второй (разностный) вход которого соединен с выходом второго перемножителя, а его выход является выходом дискриминатора разности фаз, шестой перемножитель, выход которого соединен с вторым (разностным) входом третьего блока вычитания, последовательно соединенные умножитель на два и блок вычисления синуса, выход которого соединен со вторым входом второго перемножителя, блок вычисления косинуса, выход которого соединен со вторым входом пятого перемножителя, первый вход дискриминатора разности фаз соединен с первыми входами первого и четвертого перемножителей, второй вход дискриминатора разности фаз соединен с первыми входами третьего и шестого перемножителей, третий вход дискриминатора разности фаз соединен со вторыми входами первого и шестого перемножителей, четвертый вход дискриминатора разности фаз соединен со вторыми входами третьего и четвертого перемножителей, пятый вход дискриминатора разности фаз соединен с входом умножителя на два, выход которого соединен с входом блока вычисления косинуса.
| Suman Ganguly, Aleksandar Jovancevic, "Flexible Architecture for Space Navigation", Proceedings of the 18th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2005), c | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| МНОГОКАНАЛЬНЫЙ ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2001 |
|
RU2205417C2 |
| US 7764226 B1, 27.07.2010 | |||
| US 6603803 B1, 05.08.2003 | |||
| US 7994977 B2, 09.08.2011 | |||
| US 5101356 A, 31.03.1992. | |||

