ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к области наведения по магнитно-резонансной томографии.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Движение терапевтического целевого объекта должно учитываться во время осуществления лечения, такого как, например, лучевая терапия или терапия высокоинтенсивным фокусированным ультразвуком (high intensity focused ultrasound - HIFU). Информация о движении терапевтического целевого объекта может быть использована, например, для синхронизации или выбора специфического для положения плана лечения.
Синхронизация движения или отслеживание движения может также иметь значение в стандартной диагностической магнитно-резонансной томографии (МРТ). Например, визуализация нижней части грудной клетки и верхнего отдела брюшной полости требует некоторого способа фиксации диафрагмального движения.
US2015/0169836 описывает способ, в котором визуализируют навигатор или малую область пациента, и при этом эту область совмещают с четырехмерным (4D) набором изображений того же самого пациента. Этот способ может быть, например, использован для определения фазы дыхания пациента.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является улучшение информации о положении представляющей интерес структуры (например, одного или нескольких органов и, возможно, их окрестностей, терапевтического целевого объекта и/или органов риска). Эта цель достигается системой магнитно-резонансной томографии, выполненной для определения того, находится ли представляющая интерес структура в заданной представляющей интерес области, причем система магнитно-резонансной томографии содержит
- память для хранения компьютерного программного кодового средства, чтобы заставлять магнитно-резонансную систему выполнять следующие этапы:
- этап применения многополосной последовательности магнитно-резонансной томографии для одновременного получения первого среза магнитно-резонансных данных из первого местоположения среза и второго среза магнитно-резонансных данных из второго и отличающегося местоположения среза, причем первое и второе местоположения срезов задают представляющую интерес область и;
- этап определения для определения на основе первого и второго срезов магнитно-резонансных данных и предварительных знаний о представляющей интерес структуре и/или о ее окрестностях того, находится ли представляющая интерес структура в представляющей интерес области;
причем система магнитно-резонансной томографии дополнительно содержит процессор для исполнения компьютерного программного кодового средства.
Эта задача, кроме того, достигается компьютерным программным продуктом по пункту 10 формулы изобретения.
Автору изобретения представляется, что в то время как для получения информации о фазе дыхания пациента может быть использован навигатор, это не обеспечивает информацию, связанную с нежестким преобразованием (преобразованием с деформацией). Нежесткое преобразование является проблемой, возникающей, например, при лечении или визуализации поджелудочной железы пациента. Часть поджелудочной железы расположена вблизи сердца, тогда как другая ее часть расположена вблизи печени. В результате во время дыхания поджелудочная железа деформируется нежестко.
Также, навигаторы могут обеспечивать некоторую информацию о положении представляющей интерес структуры. Однако эта информация может быть недостаточной, когда требуется большая точность определения положения либо для визуализации, либо для терапевтических целей.
Одновременно получаемые первый и второй срезы задают представляющую интерес область в теле пациента. Предпочтительно эта представляющая интерес область является областью, в которой должна быть расположена представляющая интерес структура для последующего получения изображения или осуществления лечения. Предпочтительно, чтобы первый срез располагался вблизи первой стороны представляющая интерес области и второй срез располагался вблизи второй стороны представляющей интерес области. Посредством повторного одновременного получения первого и второго срезов можно более надежно обнаруживать, что представляющая интерес структура движется за пределы (или вовнутрь) представляющей интерес области. Эта информация может быть использована для синхронизации последующего МРТ-сбора данных или чтобы навести лечение.
Согласно вариантам осуществления настоящего изобретения предварительные знания являются по меньшей мере одним из предыдущего изображения по меньшей мере части представляющей интерес структуры и/или ее окрестностей или атласа или модели формы по меньшей мере части представляющей интерес структуры и/или ее окрестностей.
Согласно дополнительным вариантам осуществления настоящего изобретения МРТ-система дополнительно содержит систему лечения. Эта система лечения может быть, например, системой лучевой терапии или HIFU-системой. Результат этапа определения может быть использован, чтобы навести лечение. Например, этот результат может быть использован для синхронизации. Таким образом, лечение доставляют только тогда, когда представляющая интерес структура находится в представляющей интерес области, или лечение доставляют только тогда, когда представляющая интерес структура не находится в представляющей интерес области. Последнее может быть, например, уместно при стремлении сберечь орган риска.
Посредством настоящего изобретения дополнительно к жестким преобразованиям, могут быть также обнаружены нежесткие преобразования. Таким образом, может быть улучшена информация о положении представляющей интерес структуры. Эта информация, предпочтительно в комбинации с положениями органов риска, может быть использована системой лечения для наведения доставки лечения пациенту. Это наведение может содержать, например, синхронизацию, отслеживание представляющей интерес структуры (например, посредством перемещения пластин коллиматора в случае лучевой терапии), выбор плана лечения из множества предварительно вычисленных планов лечения или вычисление в режиме реального времени плана лечения, обеспечивающее выбор плана лечения (например, плана лучевой терапии) для пациента, причем план лечения учитывает положение и форму представляющей интерес структуры и/или органов риска.
Согласно вариантам осуществления настоящего изобретения отслеживание может быть выполнено посредством настройки первого и второго местоположений срезов на предполагаемое положение представляющей интерес структуры. Предполагаемое положение может быть определено на основе информации, полученной во время предыдущего цикла движения и/или посредством модели движения. Результат этого отслеживания может быть использован для выбора плана лечения. Отслеживание имеет преимущества по сравнению с синхронизацией, поскольку отслеживание может приводить к уменьшению времени осуществления лечения по сравнению с синхронизацией.
Одновременное получение данных множественных срезов может быть достигнуто посредством так называемой многополосной визуализации. Многополосная визуализация известна из работы Breuer FA, Blaimer M, Heidemann RM, Mueller MF, Griswold MA, Jakob PM. Magn Reson Med. 2005 Mar;53(3):684-91 и работы Setsompop K, Gagoski BA, Polimeni JR, Witzel T, Wedeen VJ, Wald LL.Magn Reson Med. 2012 May;67(5):1210-24. doi: 10.1002/mrm.23097. Epub 2011 Aug 19.
В настоящее время многополосная визуализация используется для одновременного получения данных множественных параллельных срезов. Однако в будущем множественные срезы смогут иметь также разные ориентации.
При получении информации о жестком и/или нежестком преобразовании и/или положении и форме представляющей интерес структуры эта информация может быть непосредственно использована для наведения лечения так, чтобы лечение обеспечивало достаточную дозу для оцененной формы и положения терапевтического целевого объекта и в то же время ограничивало дозу для оцененного положения и формы органа (органов) риска. Форма и положение представляющей интерес структуры могут быть оценены отдельно на основе полученной информации. Дополнительно, могут быть использованы некоторые (простые) модели движения органов.
Согласно вариантам осуществления по настоящему изобретению система магнитно-резонансной томографии выполнена для определения формы и положения представляющей интерес структуры посредством определения отображаемого совпадения между данными магнитно-резонансной томографии и ранее полученным четырехмерным набором данных изображений представляющей интерес структуры. Этот вариант осуществления является предпочтительным, поскольку он может помочь сделать точную оценку положения и формы представляющей интерес структуры на основе множественных полученных срезов.
Согласно дополнительным вариантам осуществления настоящего изобретения система лечения, наводимая по магнитно-резонансной томографии, выполнена для получения второго набора множественных срезов представляющей интерес структуры. При достаточно частом повторении этого, может быть покрыт весь трехмерный объем представляющей интерес структуры. Этот вариант осуществления является особенно предпочтительным при отслеживании медленно движущихся структур.
Согласно другому варианту осуществления настоящего изобретения система лечения, наводимая по магнитно-резонансной томографии, выполнена для получения второй набор множественных срезов представляющей интерес структуры, причем множественные срезы во втором наборе имеют ориентацию и/или положение, отличающиеся от ориентации и/или положения множественных срезов в первом наборе срезов, и причем система лучевой терапии, наводимая по магнитно-резонансной томографии, выполнена для использования данных магнитно-резонансной томографии из первого и второго наборов множественных срезов для определения положения и формы представляющей интерес структуры. Этот вариант осуществления является предпочтительным, поскольку он может обеспечить более точную оценку положения и/или формы представляющей интерес структуры. Предпочтительно, чтобы второй набор множественных срезов был практически ортогональным первому набору множественных срезов, поскольку это может улучшить обнаружение нежесткого преобразования.
Эти и другие аспекты настоящего изобретения станут понятны из вариантов осуществления, описанных ниже, и будут разъясняться со ссылкой на них.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 схематично показывает систему лечения, наводимую по магнитно-резонансной томографии, согласно вариантам осуществления настоящего изобретения, и
Фиг. 2 схематично показывает способ согласно одному варианту осуществления настоящего изобретения, и
Фиг. 3 схематично показывает пример того, как может быть выполнено отслеживание, согласно вариантам осуществления настоящего изобретения, и
Фиг. 4 схематично показывает способ согласно другому варианту осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
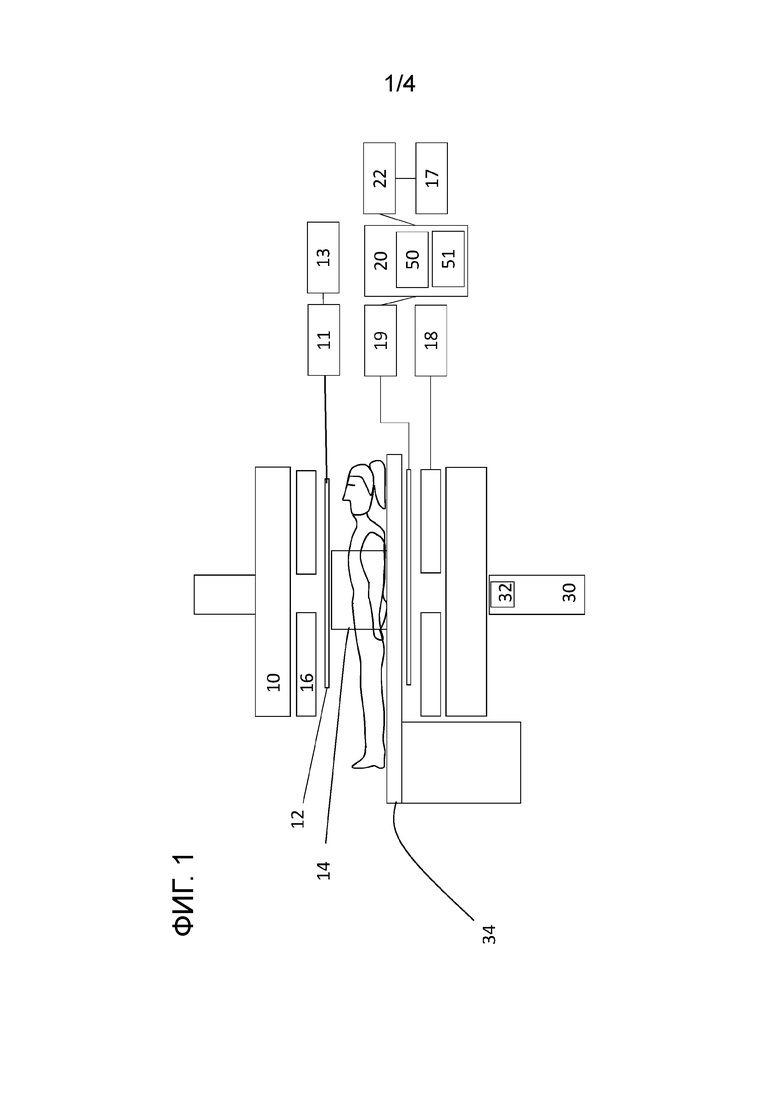
Фиг. 1 схематично показывает систему магнитно-резонансной томографии, содержащую систему доставки лечения, согласно вариантам осуществления настоящего изобретения.
Система магнитно-резонансной томографии содержит основной магнит 10, который генерирует постоянное однородное основное магнитное поле в зоне 14 исследования. Это основное магнитное поле обусловливает частичную ориентацию спинов в пациенте, подлежащем исследованию, вдоль силовых линий основного магнитного поля. Радиочастотная (РЧ) система 12 снабжена одной или более РЧ-антеннами для излучения РЧ возбуждающего электромагнитного поля в зоне 14 исследования для возбуждения спинов в теле пациента, подлежащего исследованию. Релаксирующие спины излучают сигналы магнитного резонанса в РЧ-диапазоне, которые принимаются РЧ-антеннами, в частности, в форме РЧ приемных катушек 12. РЧ-система может быть связана с переключателем 11 Tx/Rx, который в свою очередь связан с РЧ-усилителем 13. Дополнительно, обеспечены градиентные катушки 16 для генерирования временных магнитных градиентных полей, в частности, градиентных импульсов считывания и градиентов фазового кодирования. Эти градиентные поля обычно ориентированы во взаимно ортогональных направлениях и накладывают пространственное кодирование на сигналы магнитного резонанса. Градиентные усилители 18 обеспечены для активации градиентных катушек для генерирования магнитных градиентных полей кодирования. Сигналы магнитного резонанса, принимаемые РЧ приемными антеннами 12, подаются в систему 19 получения МРТ-данных. Система 19 получения МРТ-данных выдает данные на хост-компьютер 20, который в свою очередь выдает их на преобразователь 22, который может реконструировать множественные изображения из (многополосных) данных. Эти данные могут быть отображены на дисплее 17. Хост-компьютер дополнительно содержит память 50 для хранения компьютерного кодового средства, чтобы заставлять систему магнитно-резонансной томографии выполнять этап применения многополосной МРТ-последовательности для одновременного получения первого среза данных магнитно-резонансной томографии, имеющего первое местоположение среза, и второго среза данных магнитно-резонансной томографии, имеющего второе местоположение среза (фиг. 2 и 3, 304). Компьютерное кодовое средство дополнительно заставляет систему магнитно-резонансной томографии определять на основе первого и второго срезов и предварительных знаний о представляющей интерес структуре и/или ее окрестностях, находится ли представляющая интерес структура в представляющей интерес области (фиг. 2 и 3, 401). Система магнитно-резонансной томографии дополнительно содержит процессор 51 для исполнения компьютерного кодового средства.
Система магнитно-резонансной томографии, необязательно, содержит систему доставки лечения, которая является в этом примере системой 32 лучевой терапии, включающей в себя корпус 30 или другую опору или тело, поддерживающее источник излучения, выполненный с возможностью перемещаться или вращаться вокруг пациента. Система 32 лучевой терапии может содержать многопластинчатый коллиматор (multi-leaf collimator - MLC). Комбинация многопластинчатого коллиматора с движением источника излучения вокруг пациента позволяет реализовывать доставку при сложных распределениях дозы посредством, например, дуговой терапии или лучевой терапии с модулированной интенсивностью.
Движение структуры может быть скомпенсировано посредством, например, синхронизации (как в отношении получения изображений, так и в отношении осуществления лечения), отслеживания представляющей интерес структуры, выбора плана лечения из множества предварительно вычисленных планов лечения или вычисления в режиме реального времени плана лечения. Движение может быть скомпенсировано посредством аппаратного средства и/или программного средства. Примером компенсации движения, которая может быть выполнена посредством аппаратного средства, является перемещение стола 34 для визуализации или перемещение пластин в MLC. Примером компенсации движения посредством программного средства может быть онлайновое повторное вычисление или обновление плана лучевой терапии, например, посредством выбора из атласа предварительно вычисленных планов лучевой терапии, посредством средства вычисления плана лучевой терапии.
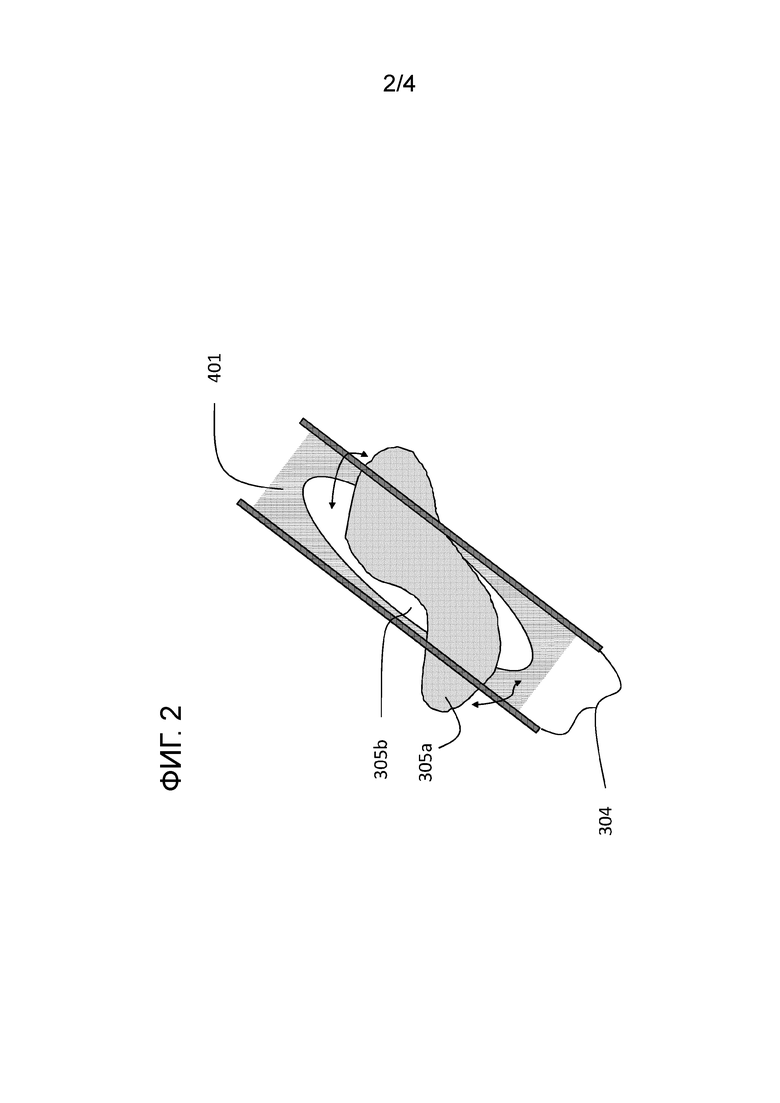
Фиг. 2 схематично показывает способ согласно одному варианту осуществления настоящего изобретения. На фиг. 2 первый и второй срезы 304 используются с целью синхронизации. Первый и второй срезы задают представляющую интерес область 401. Представляющая интерес структура 305 может преобразовываться нежестким образом, что отражено представляющей интерес структурой, имеющей первую форму 305а и деформированную форму 305b. Деформация дополнительно указана на фиг. 2 посредством стрелок. Терапевтическая доза будет доставляться к представляющей интерес структуре 305 до тех пор, пока представляющая интерес структура будет находиться в объеме, указанном ссылочной позицией 401 (представляющая интерес область) (в качестве примера см. 305а). Всегда, когда представляющая интерес структура 305 перемещается за пределы объема 401 (представляющей интерес области) (в качестве примера см. 305а), лечение останавливается.
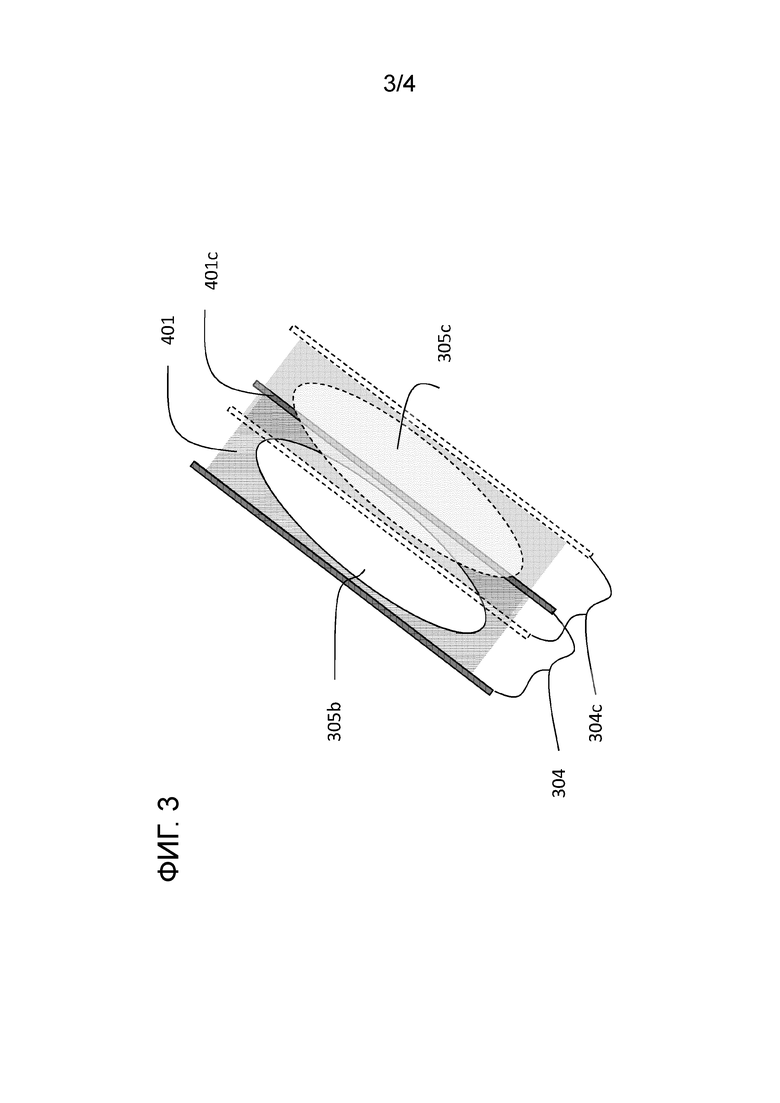
Фиг. 3 схематично показывает пример того, как может быть выполнено отслеживание согласно вариантам осуществления настоящего изобретения. На этапе определения может быть определено, что представляющая интерес структура 401 находится в представляющей интерес области 401, причем представляющая интерес область 401 задана первым и вторым срезами 304. На основе, например, предыдущего цикла движения и/или модели движения для представляющей интерес структуры можно предсказать, что представляющая интерес структура будет находиться в представляющей интерес области 401с в некоторый последующий момент времени. Представляющая интерес область 401с может быть задана первым и вторым срезами 304с. Посредством получения данных из первого и второго местоположений срезов 304с, можно определить, действительно ли представляющая интерес структура переместилась в представляющую интерес область 401с. Если предполагаются неравномерности схемы движения представляющей интерес структуры, то может быть предпочтительным выбрать первое и второе местоположения срезов таким образом, чтобы они определяли большую представляющую интерес область. Данные, полученные из (последовательных) первого и второго срезов, могут быть использованы для обновления модели движения.
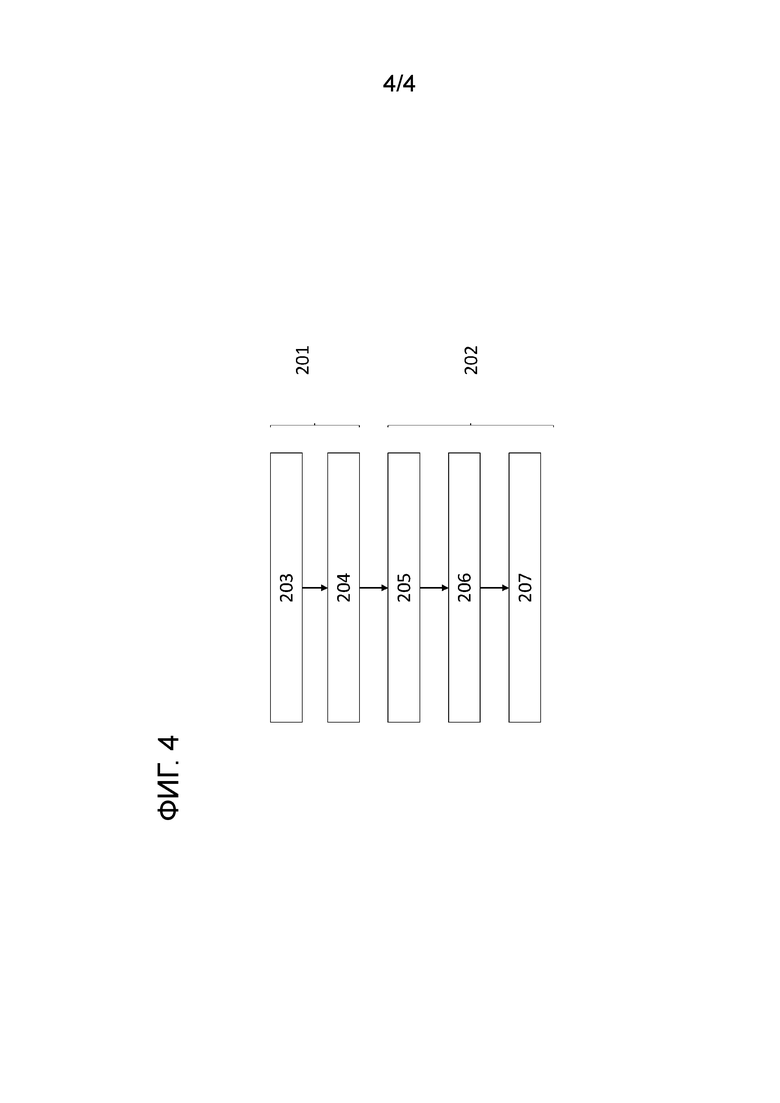
Способ, показанный на фиг. 4, содержит фазу 201 подготовки и фазу 202 лечения. Фаза подготовки содержит известные этапы способа и, наиболее вероятно, выполняется системой, отличной от системы, выполняющей этапы фазы 202 лечения. Перед лечением, получают (на этапе 203) четырехмерный набор данных изображений терапевтического целевого объекта (фиг. 2 и 3, 305a, 305b, 305c) и окружающих органов риска для получения информации о схеме движения терапевтического целевого объекта и окружающих органов риска. На основе четырехмерного набора данных изображений создают (на этапе 204) один или более планов лечения. Планы лечения создают таким образом, что они учитывают схему движения. Это может быть обеспечено многими путями. Один или более планов лечения могут быть созданы таким образом, чтобы они могли быть использованы во время стратегии синхронизации во время фазы лечения (например, фиг. 2). При использовании стратегии синхронизации целевой объект будет облучаться только тогда, когда она будет находиться в конкретной области (фиг. 2, 401). Лечение будет останавливаться, когда целевой объект будет перемещаться за пределы этой области. Множественные планы лечения могут быть созданы таким образом, чтобы они учитывали несколько стратегий синхронизации. В зависимости от фактической схемы движения, определенной при нахождении пациента на процедурном столе, пригодный план лечения может быть выбран из набора планов лечения. Также может быть создан план лечения, который предназначен для использования при отслеживании системой лечения терапевтической целевого объекта (пример, показанный на фиг. 3) (например, посредством перемещения пластин коллиматора в случае системы лучевой терапии). Альтернативно, этап 204 и, возможно, этапы 203 и 204 могут быть пропущены, и система лечения, наводимая по магнитно-резонансной томографии, может быть выполнена с возможностью вычислять план лечения (почти в режиме реального времени) во время осуществления лечения.
Во время фазы 202 лечения этап 205 многополосной визуализации выполняют на пациенте, в то время как он находится на процедурном столе (фиг. 1, 34) системы лечения, наводимой по магнитно-резонансной томографии. Во время этапа многополосной визуализации множественные срезы (фиг. 2 и 3, 304) визуализации получают одновременно из целевого объекта или органа риска (представляющей интерес структуры 305). Таким образом, система лечения, наводимая по магнитно-резонансной томографии, выполнена с возможностью более точно определять положение и форму представляющей интерес структуры. Таким образом, система лечения, наводимая по магнитно-резонансной томографии, может быть также выполнена с возможностью обнаруживать (на этапе 206) нежесткое преобразование. Эта информация может быть использована несколькими способами для наведения (на этапе 207) лечения. Два из этих способов объяснены более подробно на фиг. 2 и 3.
В то время как настоящее изобретение было показано и подробно описано в чертежах и приведенном выше описании, такие иллюстрации и описание должны считаться иллюстративными или примерными, а не ограничивающими; настоящее изобретение не ограничено раскрытыми вариантами осуществления.
Группа изобретений относится к медицине. Система магнитно-резонансной томографии выполнена с возможностью определения того, находится ли представляющая интерес структура в заданной представляющей интерес области. Причем система магнитно-резонансной томографии содержит: память для хранения компьютерного программного кодового средства, чтобы заставлять магнитно-резонансную систему выполнять следующие этапы: применение многополосной последовательности магнитно-резонансной томографии для одновременного получения первого среза магнитно-резонансных данных из первого местоположения среза и второго среза магнитно-резонансных данных из второго и отличающегося местоположения среза, причем первый срез расположен вблизи первой стороны представляющей интерес области, а второй срез расположен вблизи второй стороны представляющей интерес области; и этап определения для определения на основе первого и второго срезов магнитно-резонансных данных и предварительных знаний о представляющей интерес структуре и/или о ее окрестностях того, находится ли представляющая интерес структура в представляющей интерес области. Система магнитно-резонансной томографии дополнительно содержит процессор для исполнения компьютерного программного кодового средства. Применение группы изобретений позволит повысить точность определения положения и формы, представляющей интерес структуры. 2 н. и 13 з.п. ф-лы, 4 ил.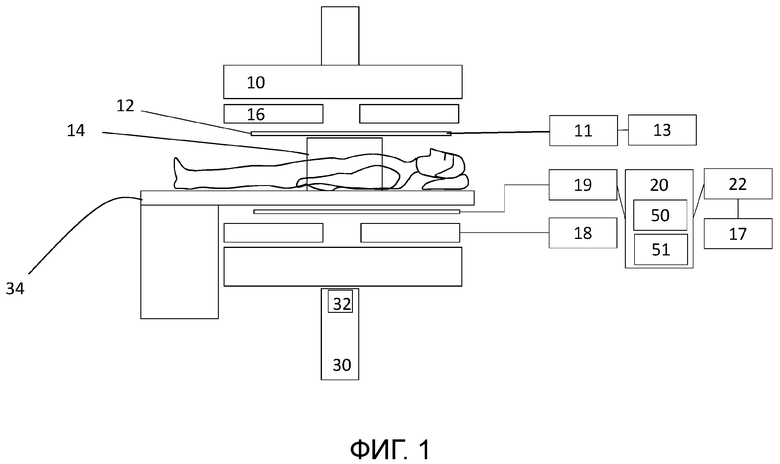
1. Система магнитно-резонансной томографии, выполненная с возможностью определения того, находится ли представляющая интерес структура в заданной представляющей интерес области, причем система магнитно-резонансной томографии содержит
- память для хранения компьютерного программного кодового средства, чтобы заставлять магнитно-резонансную систему выполнять следующие этапы:
- применение многополосной последовательности магнитно-резонансной томографии для одновременного получения первого среза магнитно-резонансных данных из первого местоположения среза и второго среза магнитно-резонансных данных из второго и отличающегося местоположения среза, причем первый срез расположен вблизи первой стороны представляющей интерес области, а второй срез расположен вблизи второй стороны представляющей интерес области; и
- этап определения для определения на основе первого и второго срезов магнитно-резонансных данных и предварительных знаний о представляющей интерес структуре и/или о ее окрестностях того, находится ли представляющая интерес структура в представляющей интерес области;
причем система магнитно-резонансной томографии дополнительно содержит процессор для исполнения компьютерного программного кодового средства.
2. Система магнитно-резонансной томографии по п. 1, дополнительно выполненная для использования результата этапа определения для синхронизации последующего сбора данных магнитно-резонансной томографии.
3. Система магнитно-резонансной томографии по любому из предшествующих пунктов, причем предварительные знания являются по меньшей мере одним из предыдущего изображения по меньшей мере части представляющей интерес структуры и/или ее окрестностей или атласа или модели формы по меньшей мере части представляющей интерес структуры и/или ее окрестностей.
4. Система магнитно-резонансной томографии по любому из предшествующих пунктов, дополнительно содержащая систему доставки лечения, причем система доставки лечения выполнена с возможностью наведения лечения на основе результата этапа определения.
5. Система магнитно-резонансной томографии по п. 4, дополнительно выполненная для отслеживания представляющей интерес структуры, причем отслеживание выполняют посредством настройки первого и второго местоположения срезов на предполагаемое положение представляющей интерес структуры.
6. Система магнитно-резонансной томографии по п. 5, дополнительно выполненная для выбора плана лечения из множества предварительно вычисленных планов лечения или вычисления в режиме реального времени плана лечения на основе отслеженного положения.
7. Система магнитно-резонансной томографии по любому из предшествующих пунктов, причем первый и второй срезы являются параллельными срезами.
8. Система магнитно-резонансной томографии по любому из предшествующих пунктов, выполненная для получения второго набора из множественных срезов представляющей интерес структуры, причем упомянутые множественные срезы во втором наборе имеют отличающуюся ориентацию и/или положение, чем ориентация и/или положение первого и второго срезов.
9. Система магнитно-резонансной томографии по любому из предшествующих пунктов, причем представляющая интерес структура является терапевтическим целевым объектом или органом риска.
10. Память для хранения компьютерного программного кодового средства для определения того, находится ли представляющая интерес структура в заданной представляющей интерес области, причем компьютерное программное кодовое средство выполнено с возможностью заставлять магнитно-резонансную систему выполнять следующие этапы:
- применение многополосной последовательности магнитно-резонансной томографии для одновременного получения первого среза магнитно-резонансных данных из первого местоположения среза и второго среза магнитно-резонансных данных из второго и отличающегося местоположения среза, причем первый срез расположен вблизи первой стороны представляющей интерес области, а второй срез расположен вблизи второй стороны представляющей интерес области и;
- этап определения для определения на основе первого и второго срезов магнитно-резонансных данных и предварительных знаний о представляющей интерес структуре и/или о ее окрестностях того, находится ли представляющая интерес структура в представляющей интерес области.
11. Память по п. 10, дополнительно содержащая программное кодовое средство, чтобы заставлять магнитно-резонансную систему выполнять этап использования результата этапа определения для синхронизации последующего сбора данных магнитно-резонансной томографии.
12. Память по п. 10 или 11, дополнительно содержащая программное кодовое средство, чтобы заставлять систему доставки лечения осуществлять этап наведения лечения на основе результата этапа определения.
13. Память по любому из пп. 10-12, дополнительно содержащая программное кодовое средство, чтобы заставлять магнитно-резонансную систему выполнять этап отслеживания представляющей интерес структуры, причем отслеживание выполняют посредством настройки первого и второго местоположения среза на предполагаемое положение представляющей интерес структуры.
14. Память по п. 13, дополнительно содержащая программное кодовое средство, чтобы заставлять магнитно-резонансную систему выполнять этап выбора плана лечения из множества предварительно вычисленных планов лечения или вычисления в режиме реального времени плана лечения на основе отслеженного положения.
15. Память по любому из пп. 10-14, причем представляющая интерес структура является терапевтическим целевым объектом или органом риска.
| US 2016114192 A1, 28.04.2016 | |||
| US 20150260820 A1, 17.09.2015 | |||
| СИСТЕМА ПЛАНИРОВАНИЯ ЛУЧЕВОЙ ТЕРАПИИ И ПОСЛЕДУЮЩЕГО НАБЛЮДЕНИЯ С ШИРОКОКАНАЛЬНОЙ РАДИУНОКЛИДНОЙ И МАГНИТНО-РЕЗОНАНСНОЙ ВИЗУАЛИЗАЦИЕЙ ИЛИ ШИРОКОКАНАЛЬНОЙ КОМПЬЮТЕРНОЙ ТОМОГРАФИЕЙ И МАГНИТНО-РЕЗОНАНСНОЙ ВИЗУАЛИЗАЦИЕЙ | 2011 |
|
RU2587077C2 |

