Изобретение относится к области судостроения в частности к судовым подводным пусковым установкам для выпуска за борт судна автономных необитаемых подводных аппаратов (АНПА) с возможностью их последующего возвращения на судно через пусковую установку.
Известно устройство для подводного пуска АНПА, использующее концепцию «сухого хранения» аппарата на борту судна-носителя [Илларионов Г. Ю., Сиденко К.С., Сидоренков В. В. Подводные роботы в минной войне. – Калининград: Янтарный сказ, 2008. – 117 с.]. Устройство содержит вертикальную шлюзовую камеру, установленную в нижней части прочного корпуса подводной лодки. Шлюзовая камера имеет несколько назначений и может использоваться, в том числе, для выпуска за борт (или возвращения) подводного аппарата. Для осуществления пуска АНПА необходимо: заполнить шлюзовую камеру забортной водой, уравнять давления в шлюзовой камере с забортным давлением, открыть люк в корпусе плавучего средства; осуществить принудительный вывод АНПА в пусковом устройстве за пределы корпуса судна с последующим его разворотом в плоскость направления пуска и выводом его на выполнение миссии. Недостатком этого устройства является ограниченность его использования, связанная с большими материальными затратами при работе с подводным судном-носителем. Недостатком устройства является также невозможность технологического обслуживания АНПА при его подготовке к целевому использованию, в связи с недоступностью аппарата, установленного в шлюзовой камере пускового комплекса.
Известно устройство для подводного пуска АНПА с плавучего объекта [Патент РФ №2654888, МПК F41F 3/07 (2006.01) опубл. 23.05.2018 Бюл. №15]. Данное устройство содержит АНПА, обслуживающий отсек для АНПА, разгонный блок для АНПА и шлюзовую камеру, расположенные в районе днища плавучего объекта. Разгонный блок с АНПА установлен в прочной переборке между обслуживающим отсеком и шлюзовой камерой и имеет возможность поворота в вертикальной плоскости. Для осуществления подводного пуска АНПА в «сухую» шлюзовую камеру нагнетают воздух до уравнивания давления с забортной средой, открывают крышку-обтекатель люка в днище корпуса плавучего объекта, в обслуживающем отсеке разгонный блок устанавливают в рабочее положение на величину угла вывода АНПА в забортную среду, фиксируют и системой формирования пускового импульса обеспечивают выход АНПА на выполнение миссии, после чего из шлюзовой камеры вытесняют водную среду и закрывают люк. Пусковой комплекс устанавливается вблизи днища корпуса плавучего объекта в районе диаметральной плоскости и занимает два отсека: обслуживающий для обслуживания разгонного блока установки и «шлюзовую камеру» для хранения, снаряжения АНПА и осуществления его принудительного выхода в водную среду. Разгонный блок герметично установлен в переборке между этими двумя отсеками с использованием шарнирно-поворотного блока с возможностью поворота приводом в вертикальной плоскости на угол 20-40° и фиксируется узлами фиксации в горизонтальном или в рабочем положениях. В шлюзовой камере выполнен люк с крышкой в днище корпуса плавучего объекта, а в перегородке между отсеками - герметично закрывающийся проем для прохода из отсека в отсек операторов обслуживающих комплекс.
Недостатком этого устройства является ограниченность или невозможность его использования с плавучего надводного или подводного носителя АНПА при работе в арктических районах в условиях освоения нефтегазовых месторождений. Причина указанного ограничения при использовании надводного носителя АНПА заключается в характерных особенностях этого региона, где значительная часть акваторий в течение длительного периода покрыта льдом, зачастую также имеет место сложная метеорологическая обстановка. Использование подводного носителя сопряжено с большими материальными затратами. Кроме этого в известном устройстве не предусмотрен прием АНПА после завершения его миссии.
Известно устройство для подводного пуска и приема автономного необитаемого подводного аппарата [Патент РФ №2719491, МПК F41F 3/07 (2006/01) опубл. 20.04.2020 Бюл. № 11] наиболее близкое по технической сущности к заявляемому устройству, которое принято в качестве прототипа. Устройство для подводного пуска и приема АНПА содержит шлюзовую камеру, отсек для обслуживания АНПА, расположенный на берегу акватории и содержащий технологический бассейн, пост подготовки АНПА, устройство контроля и управления, при этом шлюзовая камера выполнена в виде трубы, оконечности которой имеют крышки, отделяющие внутренний объем шлюзовой камеры от окружающей водной среды и технологического бассейна. Оконечность шлюзовой камеры в окружающей среде выполнена в виде причального конуса и располагается ниже максимальной толщины ледового покрытия в данном районе. Крышки снабжены электромеханическими приводами с датчиками состояния крышек, а шлюзовая камера снабжена датчиками движения АНПА и устройством приведения АНПА к входу в шлюзовую камеру со стороны окружающей водной среды, при этом электромеханические приводы крышек, датчики состояния крышек, а также датчики движения АНПА и устройство приведения АНПА функционально связаны с устройством контроля и управления. Устройство для пуска и приема автономного необитаемого подводного аппарата работает следующим образом: в исходном положении АНПА находится на посту для установки АНПА в технологическом бассейне в исходное положение пуска. Перед установкой АНПА в технологическом бассейне в положение пуска от устройства контроля и управления на электромеханические приводы крышек поступает команда открытия. АНПА в соответствии с программой функционирования входит в шлюзовую камеру и, перемещаясь внутри нее, выходит в свободное пространство водной среды. После выполнения миссии АНПА возвращается к причальному конусу шлюзовой камеры. Устройство приведения АНПА к входу в шлюзовую камеру передает информацию об этом в устройство контроля и управления, которое воздействует на электромеханические приводы крышек, шлюзовой камеры с целью их открытия. Далее АНПА через причальный конус входит в шлюзовую камеру с последующим движением в ней до входа в объем технологического бассейна в отсеке обслуживания. Далее АНПА помещается на пост подготовки.
Недостатком этого устройства является, то, что оно выполнено неподвижным в скальном грунте и не может быть перенесено в другое место, что снижает эффективность его использования. Кроме этого, очень высоки материальные затраты на его реализацию, а также трудно найти место у уреза воды, которое бы полностью соответствовало всем требованиям.
В основу предполагаемого изобретения поставлена задача создать устройство для скрытного подводного пуска и скрытого приема АНПА, которое размещается на судне-носителе, разных по водоизмещению подводных аппаратов, предназначенных для решения широкого круга задач.
Поставленная задача достигается тем, что в устройстве для подводного пуска и приема автономного необитаемого подводного аппарата (АНПА) с борта судна-носителя, содержащем отсек для обслуживания АНПА, включающий технологический бассейн, пост подготовки АНПА к пуску, а также приборы контроля и управления, шлюзовую камеру, выполненную в виде трубы с установленным на ней клинкетом, отделяющим внутренний объем шлюзовой камеры от окружающей водной среды. Оконечность шлюзовой камеры в окружающей водной среде выполнена в виде причального конуса. Вторая оконечность трубы шлюзовой камеры соединена с технологическим бассейном в его нижней части и снабжена вторым клинкетом, отделяющим внутренний объем шлюзовой камеры от внутреннего объема технологического бассейна, при этом клинкеты снабжены электромеханическими приводами с дистанционным управлением и датчиками положения клинкетов («открыто» - «закрыто»). Шлюзовая камера снабжена датчиком движения АНПА и устройством для приведения АНПА к входу в причальный конус со стороны окружающей водной среды, при этом электромеханические приводы клинкетов, датчики их положения ( «открыто» - «закрыто»), датчики движения АНПА и устройство его приведения к причальному конусу функционально связаны с устройством контроля и управления. Устройство герметично интегрировано в судовые корпусные конструкции, для чего отсек обслуживания АНПА размещен под верхней палубой судна-носителя в его внутреннем помещении. Пост подготовки АНПА к пуску снабжен рабочей палубой. Технологический бассейн выполнен в виде прямоугольной камеры и установлен вертикально во внутреннем помещении отсека обслуживании АНПА, причем своей верхней частью он установлен выше ватерлинии судна, а нижней своей частью технологический бассейн, вместе с примыкающей к нему шлюзовой камерой, установлены параллельно диаметральной плоскости судна-носителя под его днищем и заключены в обтекатель. Оконечность шлюзовой камеры, выходящая в водную среду, направлена в корму судна-носителя и снабжена дополнительно дублирующим клинкетом с электромеханическим приводом, а в качестве устройства для управления приведением АНПА к входу причального конуса шлюзовой камеры со стороны окружающей водной среды, использована система подводной радиосвязи, антенна которой установлена на днище судна – носителя в его диаметральной плоскости в непосредственной близости от входа в шлюзовую камеру.
Поставленная задача достигается также тем, что:
- верхние части клинкетных задвижек с их дистанционными приводами выполнены герметичными и расположены внутри корпуса судна- носителя.
- технологический бассейн кромкой своей верхней части установлен на 1 - 1,5 метра выше ватерлинии судна
- технологический бассейн и шлюзовая камера снабжены водяными насосами с системами для заполнения и откачки воды из их рабочих объемов
Технический результат, который достигается при решении поставленной задачи, выражается в том, что отличительные признаки предлагаемого решения обеспечивают скрытный пуск АНПА с судна-носителя в водную среду для выполнения поставленных задач, а также скрытный прием АНПА на судно-носитель, при этом обеспечивается скрытное выполнение миссии АНПА вне зависимости от погодных условий и состояния ледовой обстановки в месте проведения работ, причем различными по водоизмещению АНПА.
Сущность предполагаемого изобретения поясняется чертежами, где:
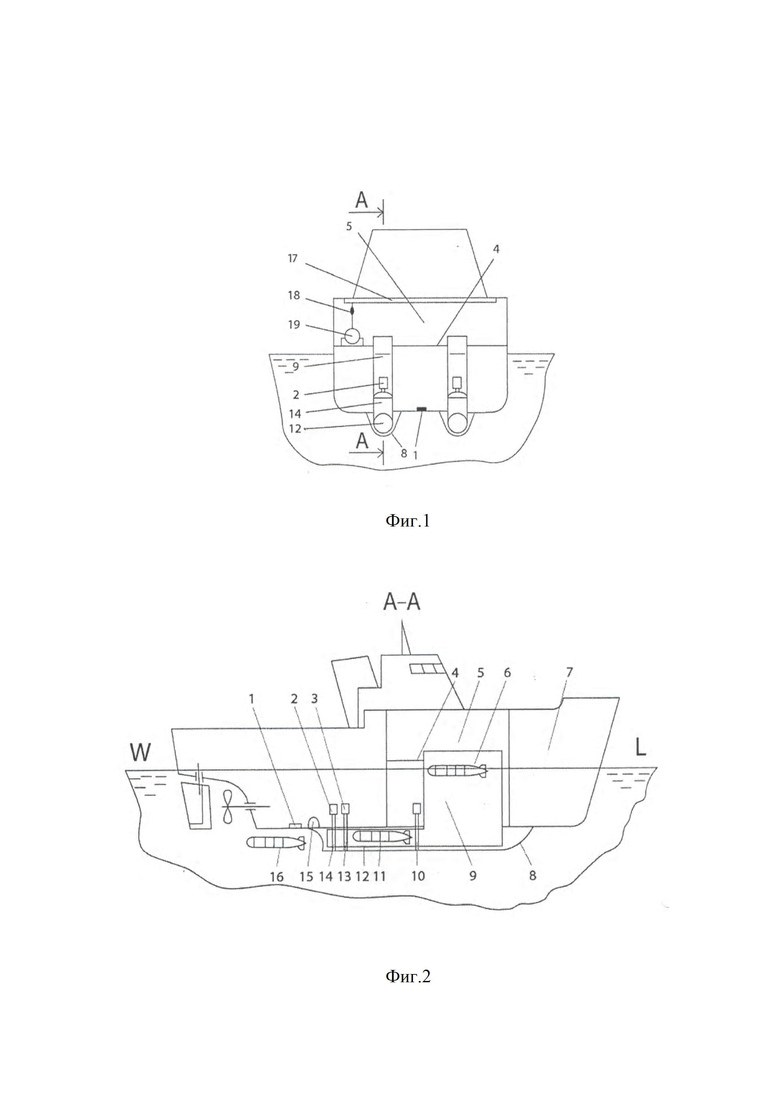
- на фиг. 1 приведена схема устройства для подводного пуска и приема АНПА с борта судна- носителя и схема его поперечного размещения на нем;
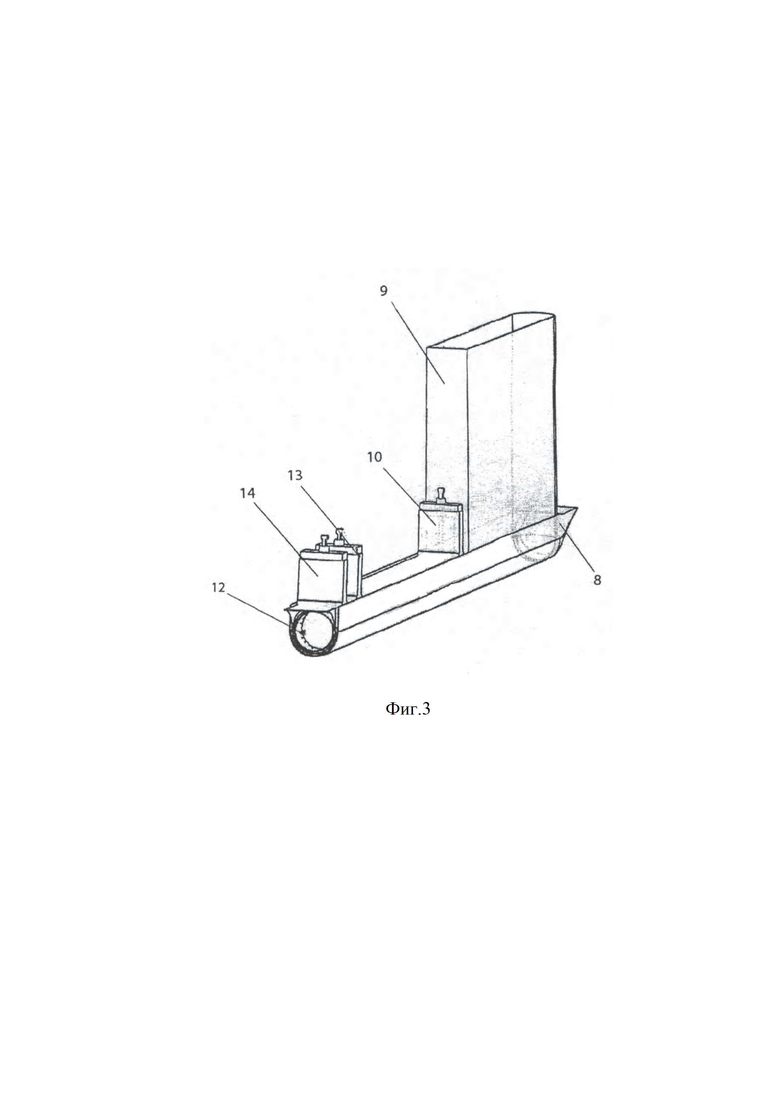
- на фиг. 2 (разрез А-А фиг. 1) приведена схема устройства для подводного пуска и приема АНПА с борта судна-носителя и схема его продольного размещения на нем;
- на фиг. 3 приведен общий вид в изометрии технологического бассейна и его шлюзовой камеры, конструктивно связанных в судовой модуль.
На чертежах приняты следующие обозначения:
1 – антенна подводной радиосвязи;
2, 3 – приводы задвижек клинкетов;
4 – рабочая палуба;
5 – пост подготовки АНПА к пуску;
6 – АНПА в надводном положении в технологическом бассейне;
7 – судно-носитель АНПА;
8 – обтекатель шлюзовой камеры и нижней части технологического бассейна;
9 – технологический бассейн;
10 – ближний клинкет со своим приводом, отделяющий внутренний объем шлюзовой камеры от внутреннего объема технологического бассейна;
11 – АНПА в подводном положении в шлюзовой камере;
12 – шлюзовая камера;
13 –клинкет-дублер со своим приводом;
14 – дальний клинкет со своим приводом, отделяющий внутренний объем шлюзовой камеры от окружающей водной среды;
15 – светильник подводного освещения входа в шлюзовую камеру;
16 – АНПА в подводном положении выходит из шлюзовой камеры;
17 – кран-балка;
18 – тельфер;
19 – АНПА подготовленный к шлюзованию на кильблоках технологической тележки.
Особенность устройства для подводного пуска и приема АНПА состоит в том, что само это устройство герметично интегрировано в судовые в корпусные конструкции, для чего отсек обслуживания АНПА размещён под верхней палубой судна 7 в его внутреннем помещении. Отсек обслуживания АНПА состоит из поста 5 подготовки АНПА к пуску с рабочей палубой 4 внутри корпуса судна 7 под палубой. Пост 5 подготовки АНПА к пуску оснащен кран-балкой 17, по которой перемещается тельфер 18, предназначенный для подъема, переноса и опускания АНПА 19, находящегося на рабочей палубе 4 , а также и после шлюзования. В отсеке обслуживания АНПА, по левому и правому борту от диаметральной плоскости судна 7 симметрично установлены два аналогичных устройства для подводного пуска и приема АНПА для повышения эффективности работы судна-носителя (фиг.1) Каждое устройство для подводного пуска и приема АНПА с борта судна-носителя содержит технологический бассейн 9, выполненный в виде стальной прямоугольной камеры, (фиг. 3) установленной вертикально и проходящей от рабочей палубы 4 до самого днища судна 7. В своей нижней части технологический бассейн 9 соединяется со стальной, цилиндрической, шлюзовой камерой 12, так, что шлюзовая камера 12 и нижняя часть бассейна 9 оказываются расположенными под днищем судна 7 в специальном обтекателе 8, при этом оконечность шлюзовой камеры 12 выходящей в водную среду, направлена в корму судна 7. Обтекатель понижает гидродинамическое сопротивление этой выступающей под днищем части и защищают ее. Шлюзовая камера 12 сообщается с бассейном 9 и оборудована тремя клинкетными задвижками с дистанционными приводами 2 и 3, это: ближний клинкет 10; дальний клинкет 14 и дублирующий клинкет 13. Верхние части всех трех клинкетов с дистанционными приводами их задвижек 2 и 3 находятся внутри корпуса судна. В непосредственной близи от входа в шлюзовую камеру на днище судна установлена антенна 1 подводной радиосвязи [URL: https://zen.yandex.ru/media/id/5b1cb4ffe987e100a 9974e02/v-rossii-izobreli-pervuiu-v-mire-raciiu-dlia-podvodnoi-radiosviazi-5b5a9d 3e4ca92f00ad1e2caf], предназначенная для управления АНПА, а также подводный светильник 15 освещающий вход в шлюзовую камеру 12.
Весь процесс выпуска и приема АНПА управляется оператором из бортового (судового) центра управления (БЦУ) с использованием локальной системы внутрисудовой и подводной радиосвязи. Процесс входа и движение АНПА 11 по шлюзовой камере 12 контролируется и управляется телевизионной системой (не показано).
Шлюзовая камера и технологический бассейн оборудованы также водяными насосами и трубопроводами для заполнения и откачки воды из рабочих объемов (не показано). При закрытых клинкетах возможно осушение технологического бассейна и самой шлюзовой камеры для профилактического осмотра. Если даже все клинкеты шлюзового устройства будут открыты, то забортная вода не поднимется в бассейне выше ватерлинии судна, что составляет примерно 1 – 1,5 метра от верхней кромки бассейна до воды.
Устройство работает следующим образом. В начале, производится подготовка АНПА к выполнению своей миссии. Технологический бассейн 9 и шлюзовая камера 12 заполнены водой. Далее, подготовленный к выполнению миссии АНПА, закрепленный на транспортной тележке подкатывается по рабочей палубе 4 к бассейну 9. После этого начинается управляемый оператором процесс выпуска АНПА за борт:
– АНПА стыкуется элементами своего стропального устройства с аналогичными ответными элементами стропального устройства тельфера 18 на кран-балке 17 (связь АНПА с БЦУ поддерживается по радиоканалу);
– АНПА приподнимают на тросах и при помощи тельфера 18 и вывешивают точно посередине над зеркалом воды технологического бассейна 9 носом ко входу в трубу шлюзовой камеры;
– начинается вытравливание троса тельфера, при этом АНПА опускается вниз и садится в воду (в надводное положение) по ватерлинию, а трос тельфера получают небольшую слабину;
– далее в бассейне происходит ручное расцепление стропального устройства, после чего АНПА готов к выполнению миссии;
– оператор БЦУ по радиоканалу дает команду АНПА погрузиться на дно технологического бассейна 9 под воздействием собственных вертикальных подруливающих устройств (ПУ);
– оператор БЦУ дает команду на открытие ближнего клинкета (клинкет открывается) и АНПА под воздействием маршевых движителей (по команде) входит в трубу шлюзовой камеры, после чего ближний клинкет закрывается;
– оператор БЦУ дает команду на открытие дальнего клинкета, а затем и клинкета–дублера, после чего АНПА по команде оператора выходит из шлюзовой камеры и приступает к выполнению своей миссии;
– механизмы шлюзового устройства приводятся в исходное состояние.
При возвращении на борт судна-носителя АНПА наводится на вход в шлюзовую камеру по сигналам стационарного гидроакустического маяка, входящего в состав аппаратуры шлюзового устройства (не чертеже показано). При прибытии АНПА под днище судна-носителя 7, он начинает управляться оператором БЦУ по радиоканалу. Маневры АНПА под днищем судна- носителя 7 контролируются телевизионной системой с освещением в темное время суток. После этого начинается управляемый оператором процесс приема АНПА на борт судна-носителя 7:
– АНПА прибыл под днище судна- носителя 7, занял соответствующий горизонт носом ко входу в шлюзовое устройство, и готов к выполнению команд оператора;
– оператор БЦУ дает команду на открытие дальнего клинкета 14 , а затем и клинкета – дублера 13, после чего АНПА по команде оператора входит в шлюзовую камеру 12 под воздействием своих маршевых движителей и продвигается вперед, пока не коснется тарелки ближнего клинкета 10, затем дальний клинкет 14 и клинкет- дублер 13 закрываются;
– оператор БЦУ дает команду на открытие ближнего клинкета 10 (клинкет открывается) и АНПА под воздействием маршевых движителей (по команде) входит в технологический бассейн 9 шлюзового устройства, после чего ближний клинкет 10 закрывается;
– оператор БЦУ по радиоканалу дает команду АНПА всплыть на поверхность бассейна 9 под воздействием своих вертикальных ПУ;
– далее в бассейне 9 происходит ручное зацепление стропальных устройств АНПА и тельфера 18 кран-балки 17, начинается подъем аппарата из бассейна и перенос его на транспортную тележку.
После подъема из морской воды, АНПА обильно поливают пресной технической водой с целью предотвращения коррозии и далее производят его техническое обслуживание. Накопленная информация о выполненной миссии АНПА автоматически скачивается с магнитных носителей аппарата по радиоканалу на компьютер оператора БЦУ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подводного пуска и приема автономного необитаемого подводного аппарата | 2019 |
|
RU2719491C1 |
| Судно - плавучая база автономных необитаемых подводных аппаратов | 2021 |
|
RU2753062C1 |
| СПОСОБ ПОДВОДНОГО ПУСКА НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА С ПЛАВУЧЕГО ОБЪЕКТА И ПУСКОВОЙ КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2654888C1 |
| Универсальное пусковое устройство для постановки самоходных исследовательских буев с борта автономного необитаемого подводного аппарата или безэкипажного катера | 2022 |
|
RU2779325C1 |
| Система мониторинга технического состояния подводного добычного комплекса | 2021 |
|
RU2774662C1 |
| ПОДВОДНОЕ СУДНО ДЛЯ ОБСЛУЖИВАНИЯ ПОДВОДНЫХ ДОБЫЧНЫХ КОМПЛЕКСОВ НА АРКТИЧЕСКОМ ШЕЛЬФЕ И ДРУГИХ ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2016 |
|
RU2629625C1 |
| СИСТЕМА ПРИВЕДЕНИЯ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА К ДОННОМУ ПРИЧАЛЬНОМУ УСТРОЙСТВУ | 2020 |
|
RU2750550C1 |
| КОМБИНИРОВАННЫЙ ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2022 |
|
RU2809785C1 |
| Транспортировщик водолазов | 2021 |
|
RU2760757C1 |
| Малогабаритный многофункциональный автономный необитаемый подводный аппарат - носитель сменной полезной нагрузки | 2018 |
|
RU2681415C1 |
Изобретение относится к судостроению. Устройство для подводного пуска и приема автономного необитаемого подводного аппарата (АНПА) с борта судна-носителя содержит отсек для обслуживания АНПА, включающий технологический бассейн, пост подготовки АНПА к пуску, а также приборы контроля и управления, шлюзовую камеру. Камера выполнена в виде трубы с установленным на ней клинкетом. Одна оконечность камеры выполнена в виде причального конуса, вторая - соединена с бассейном в его нижней части и снабжена клинкетом. Клинкеты снабжены электромеханическими приводами с дистанционным управлением и датчиками положения. Камера снабжена датчиком движения и устройством приведения АНПА к причальному конусу в виде системы подводной радиосвязи, антенна которой установлена на днище судна-носителя в его диаметральной плоскости в непосредственной близости от входа в камеру. Приводы клинкетов, датчики положения и движения и устройство приведения АНПА к причальному конусу функционально связаны с устройством контроля и управления. Устройство герметично интегрировано в судовые корпусные конструкции. Отсек обслуживания АНПА размещен под верхней палубой судна-носителя в его внутреннем помещении. Пост подготовки АНПА к пуску снабжен рабочей палубой. Бассейн выполнен в виде прямоугольной камеры и установлен вертикально во внутреннем помещении отсека обслуживания АНПА. Верхней частью бассейн установлен выше ватерлинии судна, а нижней вместе с камерой – параллельно диаметральной плоскости судна-носителя под его днищем и заключены в обтекатель. Оконечность камеры, выходящая в воду, направлена в корму судна-носителя и снабжена дублирующим клинкетом. Достигается обеспечение скрытного пуска, приема и выполнения миссии АНПА вне зависимости от погодных условий. 3 з.п. ф-лы, 3 ил.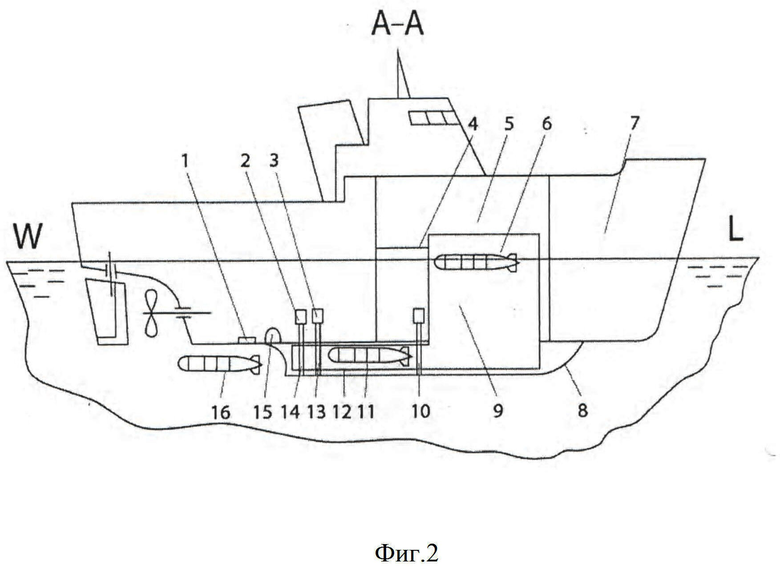
1. Устройство для подводного пуска и приема автономного необитаемого подводного аппарата с борта судна-носителя, содержащее отсек для обслуживания автономного необитаемого подводного аппарата, включающий технологический бассейн, пост подготовки автономного необитаемого подводного аппарата к пуску, а также приборы контроля и управления, шлюзовую камеру, выполненную в виде трубы с установленным на ней клинкетом, отделяющим внутренний объем шлюзовой камеры от окружающей водной среды, причем оконечность шлюзовой камеры в окружающей водной среде выполнена в виде причального конуса, вторая оконечность трубы шлюзовой камеры соединена с технологическим бассейном в его нижней части и снабжена вторым клинкетом, отделяющим внутренний объем шлюзовой камеры от внутреннего объема технологического бассейна, при этом все клинкеты снабжены электромеханическими приводами с дистанционным управлением и датчиками положения клинкетов «открыто»-«закрыто», шлюзовая камера снабжена датчиком движения автономного необитаемого подводного аппарата и устройством для приведения автономного необитаемого подводного аппарата к входу в причальный конус со стороны окружающей водной среды, при этом электромеханические приводы клинкетов, датчики их положения «открыто»-«закрыто», датчики движения автономного необитаемого подводного аппарата и устройство его приведения к причальному конусу функционально связаны с устройством контроля и управления, отличающееся тем, что устройство герметично интегрировано в судовые корпусные конструкции, для чего отсек обслуживания автономного необитаемого подводного аппарата размещен под верхней палубой судна-носителя в его внутреннем помещении, пост подготовки автономного необитаемого подводного аппарата к пуску снабжен рабочей палубой, технологический бассейн выполнен в виде прямоугольной камеры и установлен вертикально во внутреннем помещении отсека обслуживании автономного необитаемого подводного аппарата, причем своей верхней частью он установлен выше ватерлинии судна, а нижней своей частью технологический бассейн, вместе с примыкающей к нему шлюзовой камерой, установлены параллельно диаметральной плоскости судна-носителя под его днищем и заключены в обтекатель, при этом оконечность шлюзовой камеры, выходящая в водную среду, направлена в корму судна-носителя и снабжена дополнительно дублирующим клинкетом с электромеханическим приводом, а в качестве устройства для управления приведением автономного необитаемого подводного аппарата к входу причального конуса шлюзовой камеры со стороны окружающей водной среды, использована система подводной радиосвязи, антенна которой установлена на днище судна-носителя в его диаметральной плоскости в непосредственной близости от входа в шлюзовую камеру.
2. Устройство по п. 1, отличающееся тем, что верхние части клинкетных задвижек с их дистанционными приводами выполнены герметичными и расположены внутри корпуса судна-носителя.
3. Устройство по п. 1, отличающееся тем, что технологический бассейн кромкой своей верхней части установлен на 1-1,5 метра выше ватерлинии судна.
4. Устройство по п. 1, отличающееся тем, что технологический бассейн и шлюзовая камера снабжены водяными насосами с системами для заполнения и откачки воды из их рабочих объемов.
| СПОСОБ ПОДВОДНОГО ПУСКА НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА С ПЛАВУЧЕГО ОБЪЕКТА И ПУСКОВОЙ КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2654888C1 |
| Устройство для подводного пуска и приема автономного необитаемого подводного аппарата | 2019 |
|
RU2719491C1 |
| Способ получения гексакарбонилов вольфрама и молибдена | 1969 |
|
SU284777A1 |
| US 5918307 A, 29.06.1999 | |||
| Привод ленточного конвейера М.П.Шишкарева | 1981 |
|
SU963925A1 |

