Область техники
[0001] Настоящее раскрытие относится к способу и устройству для автоматизированного управления сменой полосы при автоматизированном вождении транспортным средством.
Предшествующий уровень техники
[0002] При автоматизированном управлении вождением транспортным средством было предложено управление для автоматической смены полосы на основе взаимосвязи между эксплуатируемым транспортным средством и впередиидущим транспортным средством, движущимся в той же полосе движения, что и эксплуатируемое транспортное средство (например, патентный документ 1).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1: Опубликованная заявка на патент Японии №. 2003-632734
Раскрытие изобретения
Проблемы, решаемые изобретением
[0004] Когда скорость впередиидущего транспортного средства меньше предварительно заданной скорости эксплуатируемого транспортного средства, эксплуатируемое транспортное средство может быть автоматически перемещено в полосу, отличную от впередиидущего транспортного средства, с помощью устройства управления, описанного в патентном документе 1.
[0005] Однако, существуют также случаи, в которых смена полосы, осуществляемая посредством автоматизированного вождения, не соответствует намерению водителя. Например, возможно, что после того, как смена полосы была выполнена в соответствии с намерением водителя, последующее выполнение смен полосы посредством автоматизированного вождения не будет соответствовать намерению водителя.
[0006] Следовательно, целью настоящего изобретения является реализация автоматизированного управления сменой полосы, которое учитывает намерение водителя при автоматизированном управлении вождением.
Средства, используемые для решения вышеперечисленных проблем
[0007] Для достижения вышеуказанной задачи способ автоматизированного управления сменой полосы, относящийся к настоящему раскрытию, содержит:
обнаружение впередиидущего транспортного средства, движущегося в той же полосе движения, что и эксплуатируемое транспортное средство;
определение того, удовлетворено или нет предварительно заданное условие, на основе взаимосвязи между эксплуатируемым транспортным средством и впередиидущим транспортным средством; и
выполнение автоматическим образом смену полосы посредством эксплуатируемого транспортного средства через автоматизированное управление после истечения первого предварительно заданного времени исходя из определения того, что предварительно заданное условие удовлетворено.
Кроме того, данный способ содержит:
оценивание, соответствует или нет предыдущая смена полосы, осуществленная эксплуатируемым транспортным средством, намерению водителя,
установление второго предварительно заданного времени, которое продолжительнее первого предварительно заданного времени, в качестве времени, в течение которого запрещена смена полосы, которая должна быть осуществлена посредством автоматизированного управления, после оценки того, что предыдущая смена полосы соответствовала намерению водителя; и
запрещение смену полосы, осуществляемую посредством автоматизированного управления,, в интервале, который начинается, когда запрещающее условие, которое запрещает смену полосы, осуществляемую посредством автоматизированного управления, удовлетворено, и заканчивается, когда истекает второе предварительно заданное время.
ПОЛЕЗНЫЙ ЭФФЕКТ ИЗОБРЕТЕНИЯ
[0008] Другими словами, когда смена полосы выполняется на основе намерения водителя, то смена полосы, осуществляемая посредством автоматизированного управления, не выполняется в течение фиксированного времени (второго предварительно заданного времени). В результате, после смены полосы на основе намерения водителя можно избежать последующего выполнения изменений полосы посредством автоматизированного вождения. Следовательно, может быть реализовано автоматизированное управление сменой полосы, которое учитывает намерения водителя.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0009]
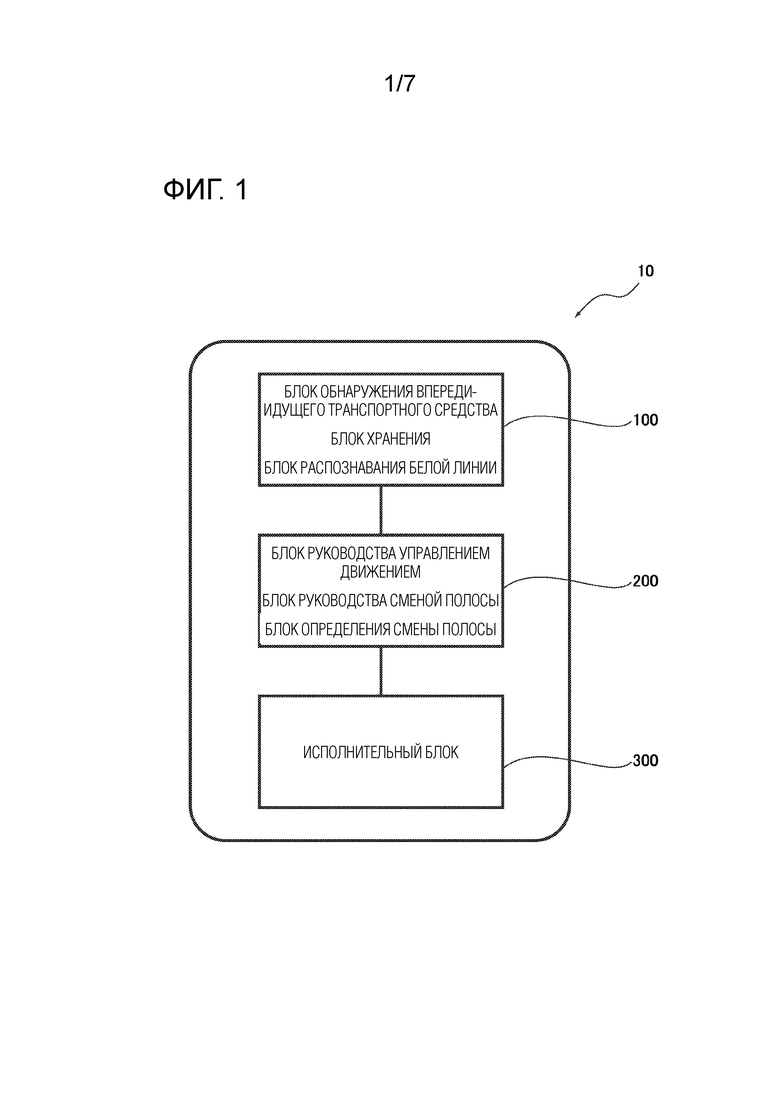
Фиг. 1 представляет собой схематический вид способа и устройства автоматизированного управления сменой полосы, относящихся к настоящему раскрытию.
Фиг. 2 представляет собой принципиальную схему конфигурации способа и устройства автоматизированного управления сменой полосы, относящихся к настоящему раскрытию.
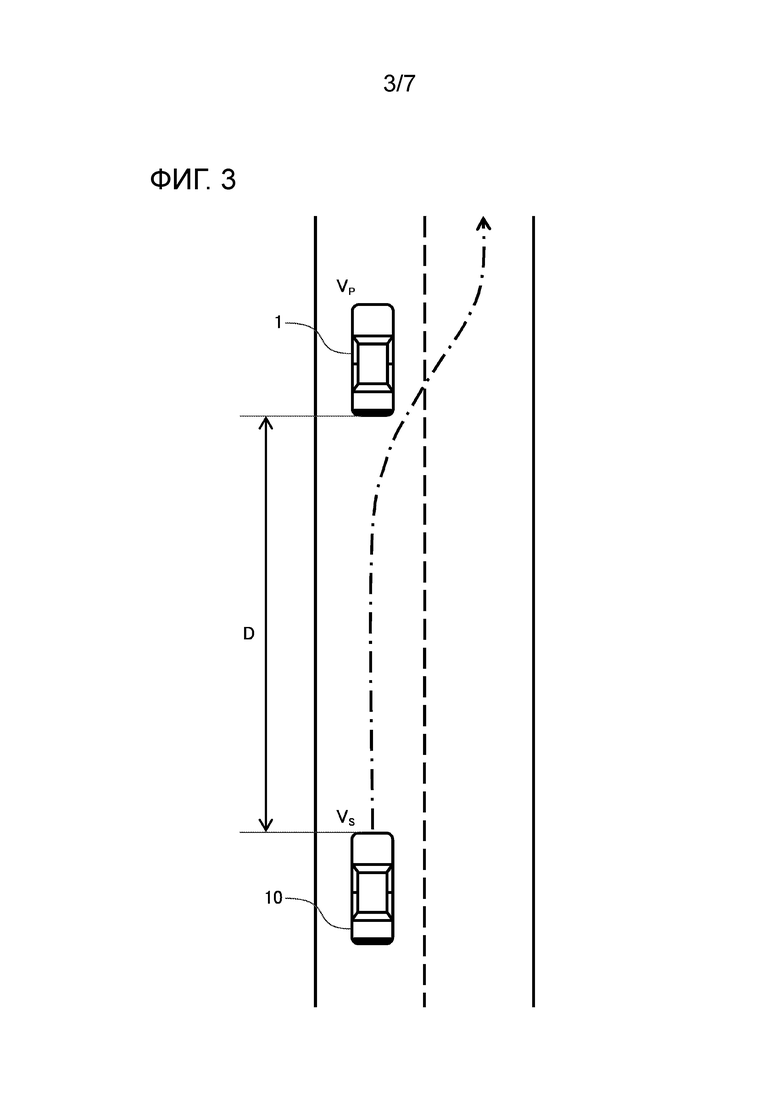
Фиг. 3 представляет собой концептуальный вид, показывающий базовую последовательность операций автоматизированного управления сменой полосы.
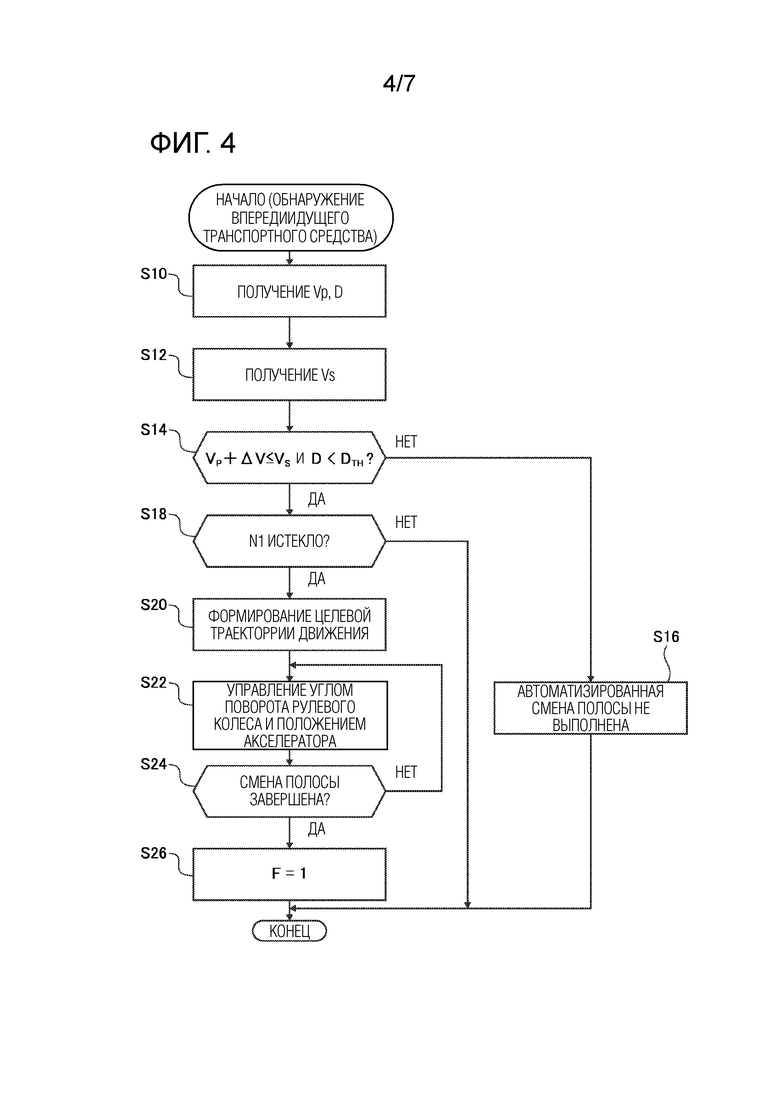
Фиг 4 представляет собой блок-схему последовательности операций, относящуюся к автоматизированному управлению сменой полосы, показанному на Фиг. 3.
Фиг. 5 представляет собой блок-схему последовательности операций автоматизированного управления сменой полосы, относящегося к настоящему раскрытию.
Фиг. 6 представляет собой блок-схему последовательности операций автоматизированного управления сменой полосы в соответствии с первым вариантом осуществления.
Фиг. 7 представляет собой блок-схему последовательности операций автоматизированного управления сменой полосы в соответствии со вторым вариантом осуществления.
Предпочтительные варианты осуществления изобретения
[0010] Варианты осуществления для реализации способа и устройства автоматизированного управления сменой полосы настоящего раскрытия описаны ниже со ссылкой на чертежи. В настоящем описании «автоматизированная смена полосы» является примером автоматизированного вождения (описано ниже) и означает, что происходит автоматическая смена полосы движения эксплуатируемого транспортного средства, чтобы избежать слишком близкого приближения к впередиидущему транспортному средству.
Первый вариант осуществления
[0011] Как показано на фиг. 1, способ и устройство автоматизированного управления сменой полосы (эксплуатируемое транспортное средство 10), относящиеся к настоящему раскрытию, снабжены тремя главными компонентами.
[0012] Во-первых, эксплуатируемое транспортное средство 10 имеет первый блок 100 для получения информации, необходимой для смены полосы. Первый блок 100 снабжен блоком обнаружения впередиидущего транспортного средства, блоком хранения и блоком распознавания белой линии. Блок обнаружения впередиидущего транспортного средства обнаруживает впередиидущее транспортное средство 1 (см. Фиг. 3), движущееся в той же полосе, что и эксплуатируемое транспортное средство, и получает скорость впередиидущего транспортного средства 1 и расстояние спереди от эксплуатируемого транспортного средства 10. Блок наблюдения наблюдает (осуществляет мониторинг) за окружающей обстановкой эксплуатируемого транспортного средства 10. Запоминающее устройство хранит полученную информацию о впередиидущем транспортном средстве 1. Блок белой линии обнаруживает белую линию и получает, в частности, расстояние между белой линией и эксплуатируемым транспортным средством 10.
[0013] Во-вторых, эксплуатируемое транспортное средство 10 имеет второй блок 200 для руководства сменой полосы, осуществляемой посредством автоматизированного вождения. Второй блок 200 снабжен блоком руководства управлением движением, блоком 27 руководства сменой полосы (см. Фиг. 2) и блоком определения смены полосы. Блок руководства управлением движением руководит параметрами (например, установленной скоростью VS эксплуатируемого транспортного средства 10), необходимыми для автоматизированного управления вождением. Кроме того, блок 27 руководства сменой полосы руководит включением или выключением автоматизированного управления сменой полосы, и, когда управление задействовано, руководит тем, в какой последовательности управления эксплуатируемое транспортное средство 10 находится в текущий момент времени. Блок определения смены полосы определяет, возможна ли автоматизированная смена полосы, на основе окружающей обстановки транспортного средства, полученной блоком наблюдения первого блока 100, взаимосвязи между впередиидущим транспортным средством и эксплуатируемым транспортным средством и других факторов. «Автоматизированное вождение» в настоящем описании означает, что, по меньшей мере, рулевое управление эксплуатируемым транспортным средством 10 осуществляется автоматически. При автоматизированном вождении в дополнение к рулевому управлению допускается автоматическое выполнение ускорения и замедления.
[0014] В-третьих, эксплуатируемое транспортное средство 10 имеет третий блок 300 для выполнения автоматизированного управления сменой полосы. Третий блок 300 снабжен исполнительным блоком для приема инструкции автоматизированной смены полосы, переданной из блока определения смены полосы второго блока 200, и управления местоположением рулевого управления и акселератора эксплуатируемого транспортного средства 10.
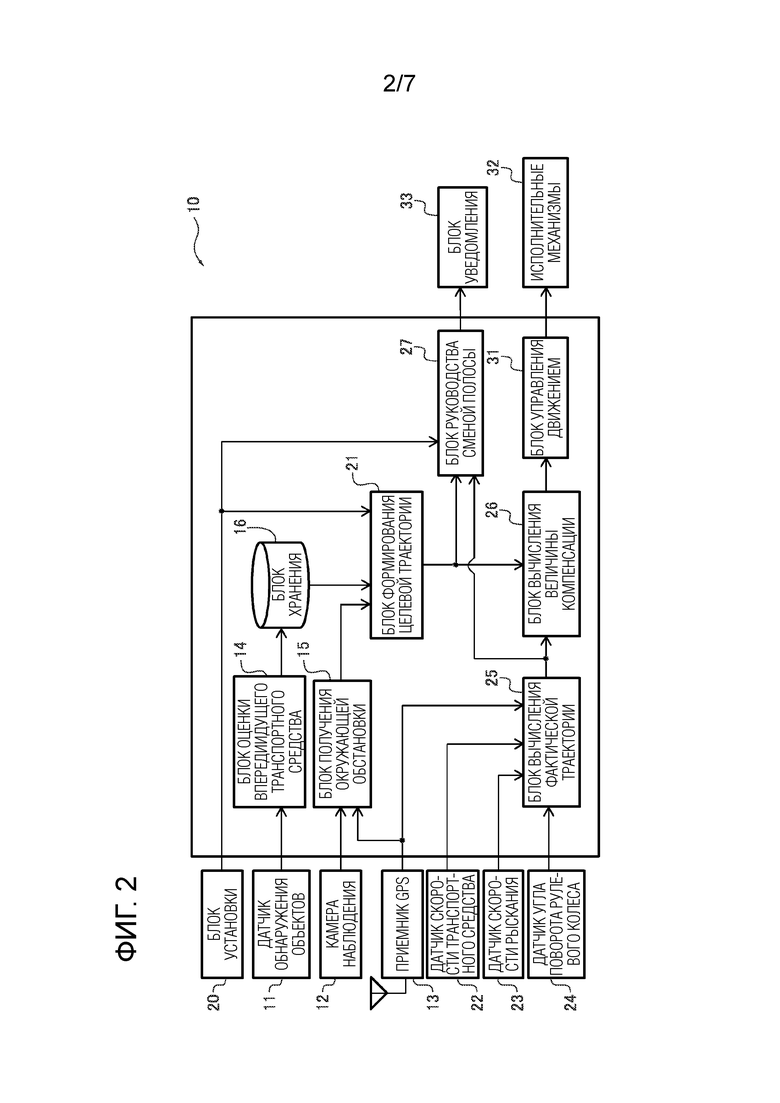
[0015] Эксплуатируемого транспортное средство 10 будет описано более подробно со ссылкой на фиг. 2.
[0016] Эксплуатируемое транспортное средство 10 имеет датчик 11 обнаружения объектов, камеру 12 наблюдения и приемник 13 GPS. Датчик 11 обнаружения объектов содержит, например, радар миллиметрового диапазона или лазерный радар, и обнаруживает объекты, присутствующие перед эксплуатируемым транспортным средством 10. Камера 12 наблюдения содержит, например, множество камер CCD и получает, по меньшей мере, изображения того, что присутствует перед или позади эксплуатируемого транспортного средства 10. Приемник 13 GPS принимает радиоволны от спутника GPS, чтобы вычислить местоположение эксплуатируемого транспортного средства 10.
[0017] Результаты обнаружения, полученные датчиком 11 обнаружения объектов, отправляются в блок 14 оценки впередиидущего транспортного средства. Блок 14 оценки впередиидущего транспортного средства оценивает, является ли обнаруженный объект впередиидущим транспортным средством 1, на основе размера, скорости движения и траектории объекта, обнаруженного датчиком 11 обнаружения объектов. Датчик 11 обнаружения объектов и блок 14 оценки впередиидущего транспортного средства соответствуют блоку обнаружения для обнаружения впередиидущего транспортного средства. Блок обнаружения вычисляет расстояние спереди между впередиидущим транспортным средством 1 и эксплуатируемым транспортным средством 10, в дополнение к скорости транспортного средства впередиидущего транспортного средства 1, чтобы реализовать автоматизированное управление сменой полосы.
[0018] Множество изображений, полученных камерой 12 наблюдения, и местоположение эксплуатируемого транспортного средства 10, вычисленное приемником 13 GPS, отправляются в блок 15 получения периферийного состояния. Блок 15 получения периферийного состояния получает окружающую обстановку эксплуатируемого транспортного средства 10 на основе изображений, отправленных с камеры 12 наблюдения, местоположения, отправленного из приемника 13 GPS, и информации карты, хранящейся заранее. В частности, получают транспортное средство сзади, препятствие вокруг эксплуатируемого транспортного средства, впередиидущее транспортное средство, движущееся в соседней полосе, и другую информацию. Камера 12 наблюдения, приемник 13 GPS и блок 15 получения периферийного состояния соответствуют блоку наблюдения для наблюдения за окружающей обстановкой эксплуатируемого транспортного средства.
[0019] Когда впередиидущее транспортное средство 1 обнаруживается блоком 14 оценки впередиидущего транспортного средства, текущее местоположение и текущая скорость впередиидущего транспортного средства 1 сохраняются в блоке 16 хранения.
[0020] Кроме того, эксплуатируемое транспортное средство 10 имеет блок 20 установки. Водитель эксплуатируемого транспортного средства 10 может выбирать (вводить) то, включить или выключить автоматизированное управление сменой полосы через блок 20 установки. Когда автоматизированное управление сменой полосы включено, можно ввести устанавливаемую скорость для эксплуатируемого транспортного средства 10. Информация, введенная через блок 20 установки, передается в блок 21 формирования целевой траектории. Блок 20 установки содержит различные переключатели и указатели направления (сигналы поворота), предусмотренные на приборной панели или рулевом колесе перед сиденьем водителя.
[0021] Блок 21 формирования целевой траектории формирует целевую траекторию для случая, когда выполняется автоматизированное управление сменой полосы, на основе информации о впередиидущем транспортном средстве 1, сохраненной в блоке 16 хранения, окружающей обстановки, полученной блоком 15 получения периферийного состояния, и информации, введенной через блок 20 установки.
[0022] Эксплуатируемое транспортное средство 10 снабжено датчиком 22 скорости транспортного средства, датчиком 23 скорости рыскания и датчиком 24 угла поворота рулевого колеса. Значения обнаружения, обнаруженные датчиком 22 скорости транспортного средства, датчиком 23 скорости рыскания и датчиком 24 угла поворота рулевого колеса, и информация о местоположении эксплуатируемого транспортного средства 10, вычисленная приемником 13 GPS, вводятся в блок 25 вычисления фактической траектории. Блок 25 вычисления фактической траектории вычисляет траекторию, фактически отслеживаемую эксплуатируемым транспортным средством 10 (фактическая траектория движения), на основе введенных значений.
[0023] Целевая траектория, формируемая блоком 21 формирования целевой траектории, и фактическая траектория движения, вычисленная блоком 25 вычисления фактической траектории, вводятся в блок 26 вычисления величины коррекции. Блок 26 вычисления величины коррекции вычисляет разницу между фактической траекторией движения относительно введенной целевой траектории и умножает подходящим образом установленный коэффициент коррекции и вычисленную разницу для вычисления величины коррекции.
[0024] Величина коррекции, вычисленная блоком 26 вычисления величины коррекции, передается в блок 31 управления движением. Блок 31 управления движением определяет значения инструкций, выдаваемых различным исполнительным механизмам 32, на основе принятой величины коррекции, так чтобы фактическая траектория движения и целевая траектория эксплуатируемого транспортного средства 10 совпадали. Исполнительные механизмы 32 приводят в действие, в частности, рулевое управление, педаль акселератора и педаль тормоза эксплуатируемого транспортного средства 10 на основе принятых значений инструкций. Другими словами, эксплуатируемое транспортное средство 10 может автоматически управлять ускорением, замедлением и управлением эксплуатируемым транспортным средством 10 на основе сигналов от блока 31 управления движением.
[0025] Информация, введенная через блок 20 установки, целевая траектория, сформированная блоком 21 формирования целевой траектории, и фактическая траектория движения эксплуатируемого транспортного средства 10, вычисленная блоком 25 вычисления фактической траектории, вводятся в блок 27 руководства сменой полосы. Блок 27 руководства сменой полосы руководит установленной скоростью VS эксплуатируемого транспортного средства 10 и включает или выключает автоматизированное управление сменой полосы на основе введенной информации от блока 20 установки. Кроме того, на основе введенной целевой траектории и фактической траектории движения выполняется определение относительно того, в какой последовательности управления находится эксплуатируемое транспортное средство 10, когда выполняется автоматизированное управление сменой полосы. Блок 27 руководства сменой полосы может, таким образом, оценивать, соответствует ли смена полосы намерению водителя. Блок 27 руководства сменой полосы соответствует оценке.
[0026] В настоящем раскрытии, как описано выше, блок 21 формирования целевой траектории, блок 25 вычисления фактической траектории, блок 26 вычисления величины коррекции, блок 27 руководства сменой полосы и блок 31 управления движением совместно упоминаются как блок управления. Блок управления, в частности, содержит процессор и т.д. и снабжен долговременным носителем записей, на котором записана программа (описано ниже) и который может быть считан компьютером.
[0027] Эксплуатируемое транспортное средство 10 имеет блок 33 уведомления, выполненный, например, на приборной панели. Блок 33 уведомления вызывает свечение света постоянным или прерывистым образом на основе информации от блока 27 руководства сменой полосы, в то время как автоматизированное управление сменой полосы (описанное ниже) запрещено, посредством чего водителя уведомляют о запрещенном состоянии. Кроме того, или в качестве альтернативы, блок 33 уведомления может отображать время, оставшееся в запрещенном интервале.
[0028] Далее будет описано автоматизированное управление сменой полосы со ссылкой на Фиг. 3 и 4. Процесс блок-схемы последовательности операций на Фиг. 4 и процессы блок-схем последовательности операций на Фиг. 5-7 (описанные ниже) выполняются блоком управления.
[0029] Как показано на Фиг. 3, D - это расстояние спереди между впередиидущим транспортным средством 1 и эксплуатируемым транспортным средством 10, VP - скорость впередиидущего транспортного средства, а VS - установленная скорость для эксплуатируемого транспортного средства 10. Во время движения процесс, показанный на Фиг.4, запускается, когда эксплуатируемое транспортное средство 10 обнаруживает впередиидущее транспортное средство 1 с использованием датчика 11 обнаружения объектов и блока 14 оценки впередиидущего транспортного средства.
[0030] На этапе S10 скорость VP впередиидущего транспортного средства и расстояние D спереди определяются с использованием блока обнаружения (датчик 11 обнаружения объектов, блок 14 оценки впередиидущего транспортного средства). Затем установленная скорость VS для эксплуатируемого транспортного средства 10, установленная с использованием блока 20 установки, получается на этапе S12.
[0031] На этапе S14 определяется, удовлетворено ли условие (предварительно заданное условие) для выполнения автоматизированного управления сменой полосы эксплуатируемого транспортного средства 10. В частности, когда установленная скорость VS для эксплуатируемого транспортного средства 10, по меньшей мере, на значение ΔV по умолчанию больше скорости VP транспортного средства впередиидущего транспортного средства 1 (другими словами, относительная скорость эксплуатируемого транспортного средства относительно впередиидущего транспортного средства 1 представляет собой, по меньшей мере, значение ΔV по умолчанию), и расстояние D спереди меньше порогового значения DTH, то определяется, что предварительно заданное условие удовлетворено. Значение ΔV по умолчанию составляет, например, 15 км/ч, а пороговое значение DTH составляет, например, 60 м.
[0032] На этапе S14 можно определить, что предварительно заданное условие удовлетворено, когда возникает только один из следующих случаев: установленная скорость VS эксплуатируемого транспортного средства 10, по меньшей мере, на значение ΔV по умолчанию больше скорости VP транспортного средства впередиидущего автомобиля 1; и расстояние D спереди меньше порогового значения DTH. Вместо вышеуказанного условия или в дополнение к вышеуказанному условию также можно определить, что предварительно заданное условие удовлетворено, когда вычислено время до столкновения (TTC) с впередиидущим транспортным средством 1 и вычисленное время до столкновения меньше времени по умолчанию.
[0033] Когда определение на этапе S14 является отрицательным, программа переходит к этапу S16, и программа заканчивается без выполнения автоматизированного управления сменой полосы движения. Когда определение на этапе S14 является положительным, программа переходит к этапу S18, и определяется, истекло ли предварительно заданное время N (точнее, первое предварительно заданное время N1), после того, как впередиидущее транспортное средство 1 было обнаружено. Значение первого предварительно заданного времени N1 составляет, например, около 5 секунд.
[0034] Когда определение на этапе S18 является отрицательным, программа заканчивается без выполнения процесса (описанного ниже). Когда определение на этапе S18 является положительным, программа переходит к этапу S20. Другими словами, процесс с этапа S10 по этап S18 повторяется до тех пор, пока определение на этапе S18 не будет положительным. Хотя это не описано ниже, эксплуатируемое транспортное средство 10 выполняет автоматизированное последующее управление по отношению к впередиидущему транспортному средству 1 в интервале, который заканчивается, когда истекает предварительно заданное время N, чтобы избежать контакта с впередиидущим транспортным средством 1. Когда водитель не желает автоматизированного управления сменой полосы, водитель может принудительно прервать управление через блок 20 установки до того, как истечет первое предварительно заданное время N1. Другими словами, когда определение на этапе S18 является положительным, можно определить, что согласие водителя было получено в отношении автоматизированной смены полосы.
[0035] На этапе S20 целевая траектория эксплуатируемого транспортного средства 10 формируется блоком 21 формирования целевой траектории, как показано пунктирной цепной линией на Фиг. 3. Затем на этапе S22 осуществляется управление углом поворота рулевого колеса и положением акселератора через различные исполнительные механизмы 32 на основе целевой траектории, сформированной на этапе S20. Управление на этапе S22 повторяется до тех пор, пока смена полосы не будет завершена.
[0036] Когда смена полосы на этапе S24 оказалась завершена, то есть когда было определено, что целевая траектория была пройдена, процесс переходит к этапу S26. На этапе S26 значение флага F (начальное значение = 0) устанавливается в 1, указывая, что было выполнено автоматизированное управление сменой полосы. Завершение автоматизированного управления сменой полосы определяется посредством распознавания местоположений эксплуатируемого транспортного средства 10 и белой линии исходя из информации, полученной блоком 15 получения периферийного состояния и приемником 13 GPS.
[0037] Хотя подробное описание опущено, вопрос о том, может ли выполняться автоматизированное управление сменой полосы, определяется в процессе на этапах с S22 по S24 на основе окружающей обстановки эксплуатируемого транспортного средства 10, полученной от блока наблюдения (камеры 12 наблюдения, блока 15 получения периферийного состояния). Например, когда на целевой траектории присутствует другое транспортное средство, выполнение автоматизированного управления сменой полосы запрещено (выполнение автоматизированного управления сменой полосы не допускается).
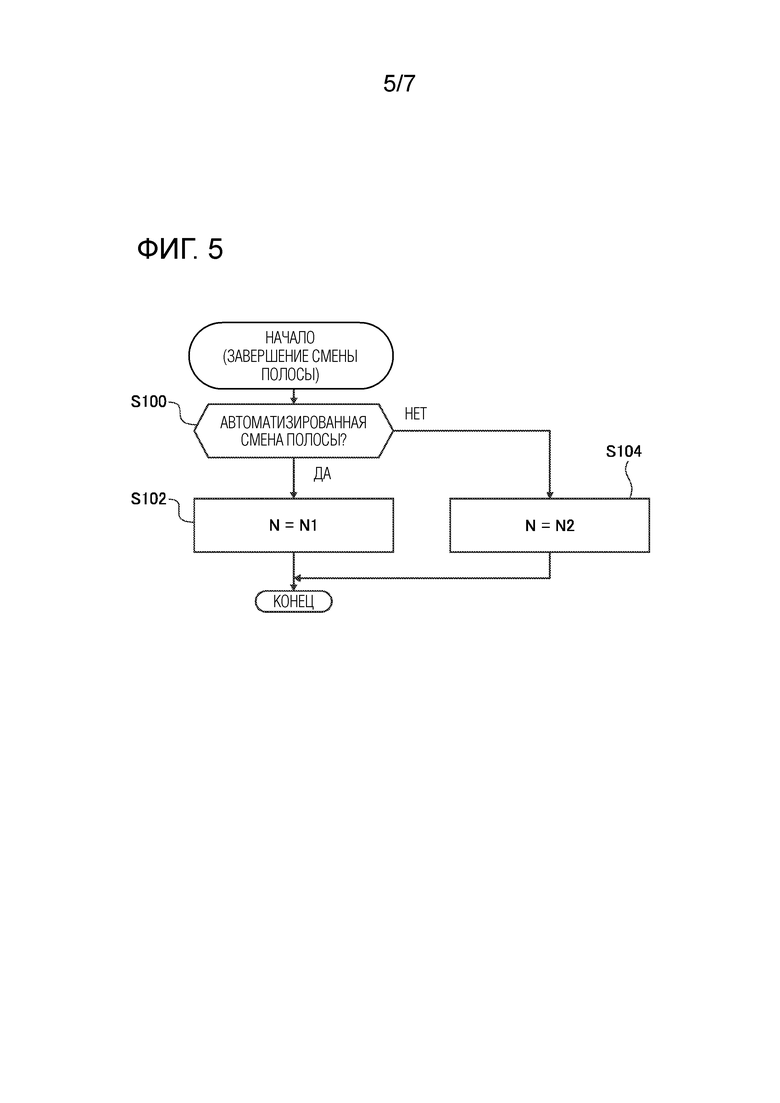
[0038] Далее будет описано автоматизированное управление сменой полосы, относящееся к первому варианту осуществления, со ссылкой на Фиг. 5 и 6. Блок-схема последовательности операций, показанная на Фиг. 5, начинается после завершения смены полосы эксплуатируемого транспортного средства 10.
[0039] На этапе S100 определяется, была ли завершена смена полосы, осуществляемая посредством автоматизированного управления. Это определение осуществляется блоком 27 руководства сменой полосы второго блока 200. В частности, определение на этапе S100 осуществляется в соответствии с наличием операции указателя направления блока 20 установки и значения флага F, установленного на этапе S26 блок-схемы последовательности операций на Фиг. 4.
[0040] Когда определение на этапе S100 является положительным, программа переходит к этапу S102, и начальное значение (первое предварительно заданное время N1) сохраняется как значение предварительно заданного времени N, которое является временем ожидания, пока не будет выполнено автоматизированное управление сменой полосы. Когда определение на этапе S100 является отрицательным, программа переходит к этапу S104, и значение предварительно заданного времени N устанавливается равным второму предварительно заданному времени N2, которое продолжительнее первого предварительно заданного времени N1. Значение второго предварительно заданного времени N2 составляет, например, около 3 секунд. Блок 33 уведомления вызывает свечение света постоянным или прерывистым образом, пока отсчитывается второе предварительно заданное время N2. Таким образом, водитель может быть уведомлен о том факте, что автоматизированное управление сменой полосы запрещено и может не иметь каких-либо опасений относительно того, что автоматизированное управление сменой полосы не выполняется.
[0041] Как описано выше, когда завершенная смена полосы была выполнена посредством автоматизированного управления, предварительно заданное время N, которое должно использоваться при следующем изменении полосы движения, сохраняется в начальном значении (первом предварительно заданном времени N1). Когда завершенная смена полосы не была выполнена посредством автоматизированного управления и вместо этого оставалась в соответствии с намерением водителя, то предварительно определенное время N устанавливается во второе предварительно заданное время N2, которое продолжительнее начального значения. Другими словами, возможно, что водитель желает оставаться в полосе, по которой в настоящее время двигается эксплуатируемое транспортное средство 10, поскольку данная полоса была выбрана водителем. Другая интерпретация заключается в том, что дальнейшее выполнение дальнейших смен полосы может не соответствовать намерениям водителя. Следовательно, в таком случае автоматизированное управление сменой полосы запрещается, пока не истечет более длительное второе предварительно заданное время N2, даже когда истекло обычное предварительно заданное время (первое предварительно заданное время N1).
[0042] Смена полосы в соответствии с намерением водителя включает, в дополнение к операции руления водителем, в себя случай, в котором смена полосы была предписана водителем в эксплуатируемое транспортное средство 10 через указатель направления и т.д., во время автоматизированного управления вождением эксплуатируемого транспортного средства 10.
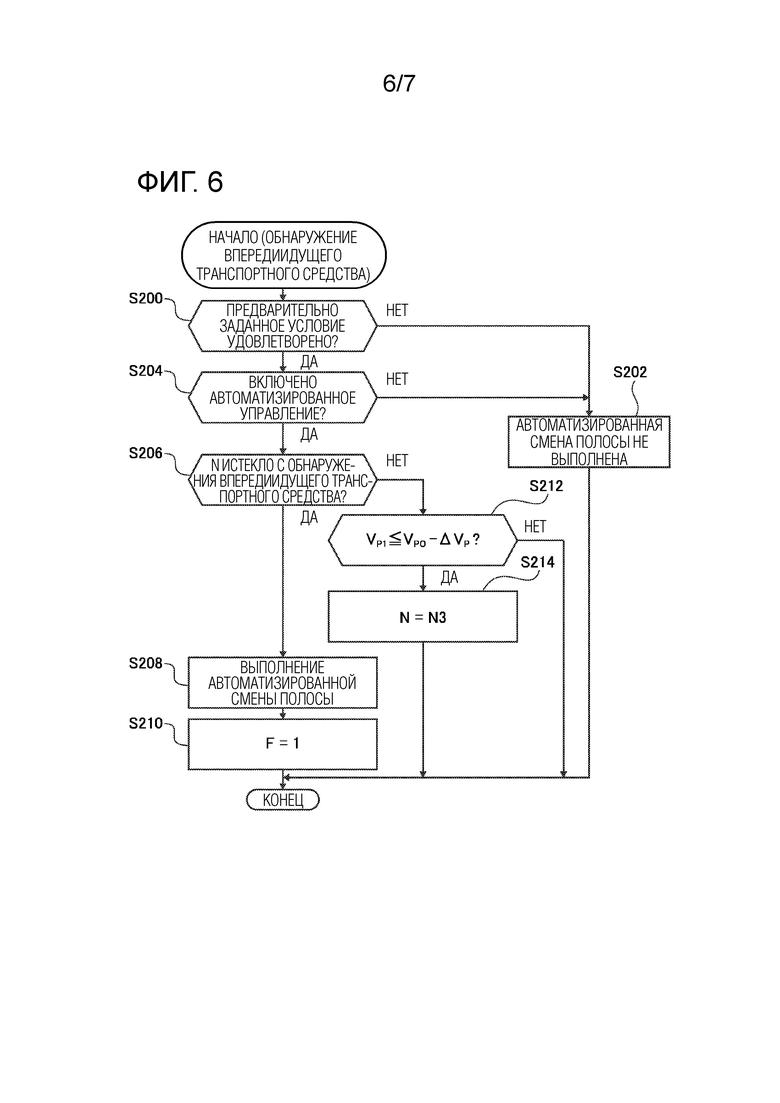
[0043] Когда новое впередиидущее транспортное средство 1 было обнаружено после автоматизированной смены полосы, запускается блок-схема последовательности операций на Фиг. 6. На этапе S200 определяется, удовлетворено ли предварительно заданное условие для выполнения автоматизированного управления сменой полосы. В дополнение к условию, показанному на этапе S14 с фиг. 4, предварительно заданное условие этапа S200 используется для определения того, была ли завершена предыдущая смена полосы.
[0044] Когда определение на этапе S200 является отрицательным, программа переходит к этапу S202, и автоматизированное управление сменой полосы не выполняется. Когда определение на этапе S200 является положительным, программа переходит к этапу S204, и определяется, включена ли функция автоматизированного управления сменой полосы. В дополнительном случае, когда водитель эксплуатируемого транспортного средства 10 не желает автоматизированного управления сменой полосы, и управление было принудительно прервано, определение на этапе S204 является отрицательным.
[0045] Когда определение на этапе S204 является отрицательным, программа переходит к этапу S202, и автоматизированное управление сменой полосы не выполняется. Когда определение на этапе S204 является положительным, программа переходит к этапу S206, и определяется, истекло ли предварительно заданное время N от обнаружения нового впередиидущего транспортного средства 1. Значение (первое предварительно заданное время N1 или второе предварительно заданное время N2), установленное в блок-схеме последовательности операций на Фиг. 5, используется в качестве предварительно заданного времени N на этапе S206.
[0046] Когда определение на этапе S206 является положительным, программа переходит к этапу S208 и выполняется автоматизированное управление сменой полосы. Когда автоматизированное управление сменой полосы на этапе S208 завершено, программа переходит на этап S210, и значение флага F, которое указывает, что автоматизированное управление сменой полосы было выполнено, устанавливается в 1. Хотя это и не указано на Фиг. 6, между этапами S208 и S210 определяется то, была ли выполнена смена полосы, таким же образом, как на этапах S22 и S24 блок-схемы последовательности операций на Фиг. 4.
[0047] Когда определение на этапе S206 является отрицательным, программа переходит к этапу S212, и определяется, равна или больше ли разница между скоростью VP0 впередиидущего транспортного средства сразу после обнаружения впередиидущего транспортного средства 1 и текущей скоростью VP1 транспортного средства впередиидущего транспортного средства 1 предварительно заданной разницы ΔVP. Когда определение на этапе S212 является положительным; другими словами, когда было определено, что после того, как впередиидущее транспортное средство 1 обнаружено, впередиидущее транспортное средство 1 замедлилось на, по меньшей мере, предварительно заданную разницу ΔVP, программа переходит к этапу S214. На этапе S214 предварительно заданное время N устанавливается в третье предварительно заданное время N3. предварительно заданная разница ΔVP составляет, например, 20 км/ч. Третье предварительно заданное время N3 является значением, которое равно или больше первого предварительно заданного времени N1, и меньше второго предварительно заданного времени N2 (N1≤N3<N2), например, от 5 до 8 секунд.
[0048] В результате блок-схема последовательности операций на Фиг. 6 повторяется с использованием третьего предварительно заданного времени N3 в качестве предварительно заданного времени N. Когда было определено, что предварительно заданное время N (третье предварительно заданное время N3) истекло, на этапе S206, то программа переходит к этапу S208, и выполняется автоматизированное управление сменой полосы (Фигура 4: этапы с S20 по S24).
[0049] Другими словами, возможно, что водитель не желает оставаться в той же полосе, когда произошло значительное изменение в состоянии движения впередиидущего транспортного средства 1, даже когда предыдущая смена полосы была выполнена в соответствии с намерение водителя. Следовательно, в таком случае время ожидания, пока не будет выполнено автоматизированное управление сменой полосы, переключается в третье предварительно заданное время N3, которое является относительно коротким. Таким образом, автоматизированное управление движением может продолжаться без дискомфорта для водителя.
[0050] Когда определение на этапе S212 является отрицательным, можно определить, что не было значительных изменений в состоянии движения впередиидущего транспортного средства 1, и поэтому программа заканчивается без изменения предварительно заданного времени N. В результате, блок-схема на Фиг. 6 повторяется, пока поддерживается текущее предварительно заданное время N. Когда определено, что предварительно заданное время N истекло на этапе S206, программа переходит на этап S208, и выполняется автоматизированное управление сменой полосы (Фиг. 4: этапы с S20 по S24).
[0051] При определении на этапе S212 может быть добавлено следующее условие в дополнение или вместо того, что описано выше. Другими словами, определяется, должно ли эксплуатируемое транспортное средство 10 замедлиться по меньшей мере на предварительно заданную величину замедления в интервале, который начинается, когда обнаруживается новое впередиидущее транспортное средство 1, и заканчивается, когда истекает предварительно заданное время N, или же относительная скорость эксплуатируемого транспортного средства 10 по отношению к впередиидущему транспортному средству 1 имеет, по меньшей мере, предварительно заданное значение.
[0052] Другими словами, хотя нет существенного изменения в состоянии движения впередиидущего транспортного средства 1, может быть случай, в котором состояние движения эксплуатируемого транспортного средства 10 претерпевает значительные изменения, когда управление автоматизированным следованием за впередиидущим транспортным средством 1 выполняется в течение относительно длительного периода времени (в частности, в течение второго предварительно заданного времени N2). В таком случае, возможно, что водитель не желает оставаться в той же самой полосе в течение длительного периода времени, даже если предыдущая смена полосы соответствовала намерению водителя. Поэтому, когда вышеописанное дополнительное определение является положительным, время ожидания, пока не будет выполнено автоматизированное управление сменой полосы, может переключиться в третье предварительно заданное время N3, которое является относительно коротким.
[0053] Возможно, что водитель желает произвести дополнительную смену полосы, не дожидаясь истечения второго предварительно заданного времени N2, даже когда предыдущая смена полосы была выполнена в соответствии с намерением водителя. В таком случае водитель может отменить установку второго предварительно заданного времени N2 посредством использования блока 20 установки. Другими словами, водитель может отменить запрещение автоматизированного управления сменой полосы до истечения второго предварительно заданного времени N2.
[0054] Выделенный переключатель может быть предусмотрен в блоке 20 установки в качестве средства для отмены запрещения автоматизированного управления сменой полосы. Альтернативно, отмена может быть реализована с помощью указателя направления, составляющего блок 20 установки. В необязательном порядке, можно реализовать отмену, установив переключатель ВКЛ/ВЫКЛ для автоматизированного управления сменой полосы блока 20 установки в положение ВЫКЛ, или можно дважды нажать на переключатель.
[0055] Как описано выше, первый вариант осуществления описывает способ автоматизированного управления сменой полосы, в котором обнаруживается впередиидущее транспортное средство 1, движущееся в той же полосе движения, что и эксплуатируемое транспортное средство 10, осуществляется определение того, удовлетворено ли предварительно заданное условие, на основе взаимосвязи (VS, VP, D) между эксплуатируемым транспортным средством 10 и впередиидущим транспортным средством 1 (S14), и смена полосы эксплуатируемым транспортным средством 10 выполняется через автоматизированное управление после того, как первое предварительно заданное время N1 истекло, исходя из определения, что предварительно заданное состояние удовлетворено. Оценка выполняется в отношении того, соответствует или нет предыдущая смена полосы, осуществленная эксплуатируемым транспортным средством 10, намерению водителя (S100), когда оценка состоит в том, что предыдущая смена полосы соответствует намерению водителя, то второе предварительно заданное время N2, которое продолжительнее первого предварительно заданного времени N1, устанавливается в качестве времени, в течение которого смена полосы, осуществляемая посредством автоматизированного управления, запрещена, и смена полосы, осуществляемая посредством автоматизированного управления, запрещена в интервале, который начинается, когда удовлетворено запрещающее условие, которое запрещает смену полосы, осуществляемую посредством автоматизированного управления, и заканчивается, когда истекает второе предварительно заданное время N2 (S104, S200, S204, S206). Тем самым может быть реализовано автоматизированное управление сменой полосы, которое учитывает намерения водителя.
[0056] Другими словами, возможно, что, когда предыдущая смена полосы выполняется в соответствии с намерением водителя, водитель желает остаться в полосе, в которой оказался в результате смены полосы. Соответственно, существует риск того, что водителю будет неудобно, когда смена полосы последовательно выполняется автоматизированным управлением вождением после того, как предыдущая смена полосы произошла в соответствии с намерением водителя. Ввиду этого, в первом варианте осуществления автоматизированное управление сменой полосы запрещено до тех пор, пока второе предварительно заданное время N2, которое больше обычного времени (первое предварительно заданное время N1), не истечет после завершения смены полосы в соответствии с намерением водителя.
[0057] В способе управления по первому варианту осуществления запрещающее условие удовлетворено, когда определено, что завершена предыдущая смена полосы в соответствии с намерением водителя, и удовлетворено условие (предварительно заданное условие) для выполнения автоматизированного управления сменой полосы эксплуатируемого транспортного средства 10 (S200). Следовательно, смена полосы, осуществляемая посредством автоматизированного управления, запрещается, пока не истечет второе предварительно заданное время N2 после того, как запрещающее условие будет выполнено (S104, S200, S204 и S206). Тем самым может быть реализовано автоматизированное управление сменой полосы, которое учитывает намерения водителя.
[0058] В способе управления по первому варианту осуществления впередиидущее транспортное средство 1 обнаруживается после того, как предыдущая смена полосы в соответствии с намерением водителя завершена, и когда определение сделано на основе взаимосвязи (VS, VP, D) между эксплуатируемым транспортным средством 10 и впередиидущим транспортным средством 1, что эксплуатируемое транспортное средство 10 должно замедлиться на, по меньшей мере, предварительно заданную величину замедления, или когда было определено, что относительная скорость (VS-VP) эксплуатируемого транспортного средства 10 по отношению к новому впередиидущему транспортному средству 1 является, по меньшей мере, предварительно заданным значением, то смена полосы, осуществляемая посредством автоматизированного управления, запрещена, пока не истечет третье предварительно заданное время N3, причем третье предварительно заданное время N3 равно или больше первого предварительно заданного времени N1 после удовлетворения запрещающего условия и меньше второго предварительно заданного времени N2 (S214, S206, S208). Таким образом, автоматизированное управление вождением может продолжаться без дискомфорта для водителя.
[0059] Как описано выше, возможно, что, когда предыдущая смена полосы выполнена в соответствии с намерением водителя, водитель желает остаться в полосе движения в результате смены полосы. Однако, может быть случай, в котором скорость эксплуатируемого транспортного средства 10 должна быть резко снижена после смены полосы. В таком случае, возможно, что водитель желает смены полосы вопреки первоначальному намерению. Следовательно, в таком случае способ управления адаптирован так, что автоматизированное управление сменой полосы выполняется на ранней стадии без ожидания второго предварительно заданного времени N2.
[0060] В способе управления по первому варианту осуществления впередиидущее транспортное средство 1 обнаруживается после того, как предыдущая смена полосы в соответствии с намерением водителя завершена, выполняется определение относительно того, является разность между скоростью VP0 транспортного средства впередиидущего транспортного средства 1 во время обнаружения и текущей скоростью VP1 транспортного средства впередиидущего транспортного средства 1, по меньшей мере, предварительно заданной разницей (S212), и когда определено, что разница является, по меньшей мере, предварительно заданной разницей VP, смена полосы, осуществляемая посредством автоматизированного управления, запрещена, пока не истечет третье предварительно заданное время N3, причем третье предварительно заданное время N3 равно или больше первого предварительно заданного времени N1 после того, как запрещающее условие удовлетворено, и меньше второго предварительно заданного времени N2 (S214, S206, S208). Таким образом, автоматизированное управление вождением может быть продолжено без причинения неудобства водителю.
[0061] Даже когда предыдущая смена полосы была выполнена в соответствии с намерением водителя, относительная скорость относительно эксплуатируемого транспортного средства 10 может после этого уменьшиться из-за замедления впередиидущего транспортного средства 1. В таком случае существует риск того, что водителю будет некомфортно, когда автоматизированное управление сменой полосы запрещено, пока не истечет второе предварительно заданное время N2. Следовательно, в таком случае способ управления адаптирован так, что автоматизированное управление сменой полосы выполняется на ранней стадии без ожидания второго предварительно заданного времени N2.
[0062] В способе управления по первому варианту осуществления водитель эксплуатируемого транспортного средства 10 уведомляется о том, что смена полосы, осуществляемая посредством автоматизированного управления, запрещена в интервале, который начинается, когда удовлетворено запрещающее условие, и заканчивается, когда второе предварительно заданное время N2 истекает (блок 33 уведомления). Таким образом, водитель может избежать ощущения неуверенности в том, что автоматизированное управление сменой полосы не выполняется.
[0063] Уведомление, сделанное блоком 33 уведомления, может быть отображением оставшегося времени, пока не истечет второе предварительно заданное время N2. Таким образом, водитель может быть уведомлен о времени, когда автоматизированное управление сменой полосы будет перезапущено.
[0064] В способе управления по первому варианту осуществления возможно отменить запрещение смены полосы, осуществляемой посредством автоматизированного управления, в интервале, который начинается, когда удовлетворено запрещающее условие, и заканчивается, когда истекает второе предварительно заданное время N2. Тем самым может быть реализовано автоматизированное управление сменой полосы, которое учитывает намерения водителя.
[0065] В способе управления по первому варианту осуществления предварительно заданное условие представляет собой по меньшей мере одно из: относительная скорость (VS-VP) эксплуатируемого транспортного средства 10 относительно впередиидущего транспортного средства 1 является, по меньшей мере, значением по умолчанию ΔV, относительное местоположение между эксплуатируемым транспортным средством 10 и впередиидущим транспортным средством 1 (расстояние D спереди) меньше предварительно заданного расстояния (порогового значения) DTH, и прогнозируемое время до столкновения (TTC) с впередиидущим транспортным средством 1 меньше времени по умолчанию. Таким образом, автоматизированное управление сменой полосы может быть выполнено с подходящим планированием по времени.
[0066] Устройство автоматизированного управления сменой полосы по первому варианту осуществления содержит: блок управления (блок 21 формирования целевой траектории, блок 25 вычисления фактической траектории, блок 26 вычисления величины коррекции, блок 27 руководства сменой полосы и блок 31 управления движением) для автоматизированного управления, по меньшей мере, рулевым управлением эксплуатируемого транспортного средства 10; блок обнаружения (датчик 11 обнаружения объектов и блок 14 оценки впередиидущего транспортного средства) для обнаружения впередиидущего транспортного средства 1, движущегося в той же полосе, что и эксплуатируемое транспортное средство 10; и блок оценки (блок 27 руководства сменой полосы) для оценки того, что смена полосы была выполнена в соответствии с намерением водителя. Блок управления выполнен так, чтобы выполнять смену полосы, осуществляемую эксплуатируемым транспортным средством 10 посредством автоматизированного управления после того, как первое предварительно заданное время N1 истекло после того, как было определено, что предварительно заданное условие было удовлетворено, на основе взаимосвязи (VS, VP, D) между эксплуатируемым транспортным средством 10 и впередиидущим транспортным средством 1 (S14, S18-S24). Однако, блок управления выполнен так, чтобы устанавливать второе предварительно заданное время N2, которое продолжительнее первого предварительно заданного времени N1, в качестве времени, в течение которого смена полосы, осуществляемая посредством автоматизированного управления, запрещена, в случае, когда была сделана оценка того, что предыдущая смена полосы была преднамеренно выполнена водителем (S100, S104), и запрещать смену полосы, осуществляемую посредством автоматизированного управления, в интервале, который начинается, когда удовлетворено запрещающее условие, которое запрещает смену полосы, осуществляемую посредством автоматизированного управления, и заканчивается, когда истекает второе предварительно заданное время N2 (S200, S204, S206). Автоматизированное управление сменой полосы, которое учитывает намерения водителя, может, таким образом, быть реализовано таким же образом, как и способ управления, описанный выше.
Второй вариант осуществления
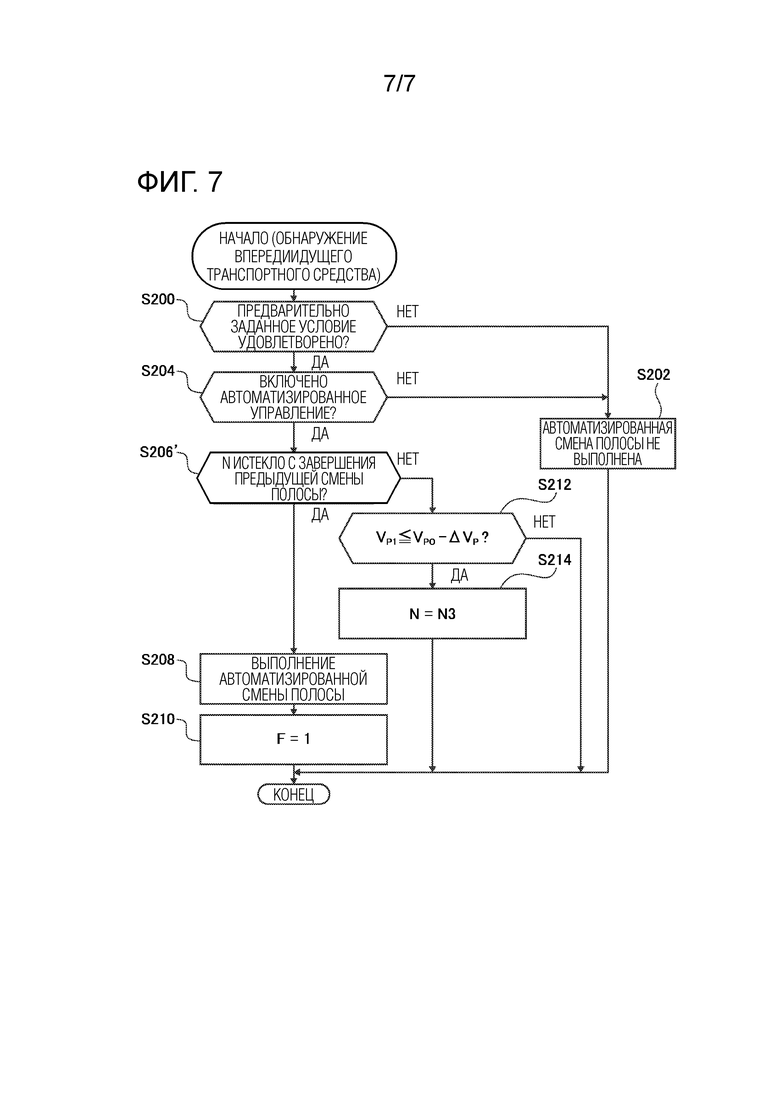
[0067] Способ и устройство автоматизированного управления сменой полосы, относящиеся ко второму варианту осуществления настоящего изобретения, будут описаны со ссылкой на Фиг. 7. На Фиг. 7 такие же этапы, что и в первом варианте осуществления, обозначены теми же ссылочными позициями, что и на Фиг. 6.
[0068] Как и в первом варианте осуществления, когда смена полосы эксплуатируемого транспортного средства 10 завершена, предварительно заданное время N устанавливается в соответствии с блок-схемой последовательности операций на Фиг. 5 (Фиг. 5: этапы с S100 по S104). Когда новое впередиидущее транспортное средство 1 обнаружено после смены полосы, выполняется блок-схема последовательности операций на Фиг. 7.
[0069] На блок-схеме последовательности операций на Фиг. 7 процесс этапов с S200 по S204 выполняется таким же образом, как и в первом варианте осуществления. На этапе S206’ определяется, истекло ли предварительно заданное время N с момента завершения предыдущей смены полосы. Как описано выше, в автоматизированном управлении сменой полосы, относящемся к первому варианту осуществления, когда предыдущая смена полосы была завершена и удовлетворено предварительно заданное условие для выполнения автоматизированного управления сменой полосы, запрещающее условие удовлетворено и запущен отсчет предварительно заданного времени N. В способе и устройстве управления автоматизированной сменой полосы, относящихся ко второму варианту осуществления, когда определено, что предыдущая смена полосы была завершена, запрещающее условие удовлетворено, и начинается отсчет предварительно заданного времени N.
[0070] В зависимости от дорожных условий могут быть случаи, в которых впередиидущее транспортное средство 1 некоторое время не обнаруживается даже после смены полосы. В таком случае текущая полоса движения проезжается в течение фиксированного промежутка времени в интервале, который заканчивается, когда обнаруживается новое впередиидущее транспортное средство 1. Соответственно, водитель не должен чувствовать себя некомфортно, даже если автоматизированное управление сменой полосы сразу же выполняется после обнаружения нового впередиидущего транспортного средства 1. Следовательно, во втором варианте осуществления, когда было определено, что предыдущая смена полосы была завершена, начинается отсчет предварительно заданного времени N.
[0071] Остальной процесс (S208-S214) является таким же, как в блок-схеме последовательности операций на Фиг. 6 первого варианта осуществления, и, таким образом, здесь не описан.
[0072] С учетом вышеизложенного, во втором варианте осуществления смена полосы, осуществляемая посредством автоматизированного управления, запрещена, пока не истечет второе предварительно заданное время N2 после завершения смены полосы в соответствии с намерением водителя (S206’). Другими словами, после смены полосы выполняется отсчет второго предварительно заданного времени N2, независимо от того, присутствует ли впередиидущее транспортное средство 1 или нет. Таким образом, автоматизированное управление сменой полосы может быть начато плавно, когда, например, впередиидущее транспортное средство 1 было обнаружено после того, как по меньшей мере второе предварительно заданное время истекло после того, как смена полосы была завершена.
[0073] Способ и устройство автоматизированного управления сменой полосы настоящего изобретения описаны выше на основе вариантов осуществления 1 и 2. Однако конкретная конфигурация не ограничена этими вариантами осуществления; конструктивные изменения, дополнения и т.д. допускаются при условии, что они не выходят за рамки сущности изобретения согласно каждому пункту формулы изобретения.
[0074] Например, конкретные числовые значения были показаны в вариантах осуществления как значения предварительно заданного времени N (первое предварительно заданное время N1, второе предварительно заданное время N2, третье предварительно заданное время N3). Однако эти числовые значения приведены только для иллюстрации. Предварительно заданное время N может изменяться в соответствии со скоростью эксплуатируемого транспортного средства 10 и впередиидущего транспортного средства 1.
[0075] В вариантах осуществления свет или оставшееся время второго предварительно заданного времени N2 отображаются в качестве блока 33 уведомления. Тем не менее, микрофон может быть обеспечен блоку 33 уведомления, и различные уведомления могут быть предоставлены звуковым образом.
[0076] В вариантах осуществления только примеры смен полосы эксплуатируемого транспортного средства 10 показаны в качестве автоматизированного управления изменением полосы. Тем не менее, настоящее раскрытие является примером автоматизированного вождения, и очевидно, что также может быть применено в случае выполнения автоматизированной смены полосы, чтобы обогнать впередиидущее транспортное средство, и, после того, как впередиидущее транспортное средство обогнано, выполнить автоматизированное управление обгоном для автоматического возврата на исходную полосу движения.
Изобретение относится к способу и устройству для автоматизированного управления сменой полосы. Способ автоматизированного управления сменой полосы содержит этапы, на которых обнаруживают впередиидущее транспортное средство, определяют, удовлетворено или нет предварительно заданное условие, на основе взаимосвязи между эксплуатируемым транспортным средством и впередиидущим транспортным средством и выполняют автоматическую смену полосы посредством эксплуатируемого транспортного средства через автоматизированное управление после истечения первого предварительно заданного времени. При этом способ управления оценивает, соответствует или нет предыдущая смена полосы намерению водителя, устанавливает второе предварительно заданное время, которое продолжительнее первого предварительно заданного времени, в качестве времени, в течение которого запрещена смена полосы, которая должна быть осуществлена посредством автоматизированного управления, и запрещает смену полосы, осуществляемую посредством автоматизированного управления, в интервале, который начинается, когда запрещающее условие, которое запрещает смену полосы, удовлетворено, и заканчивается, когда истекает второе предварительно заданное время. Устройство автоматизированного управления сменой полосы содержит блок управления, блок обнаружения, блок оценки. Достигается повышение безопасности. 2 н. и 8 з.п. ф-лы, 7 ил.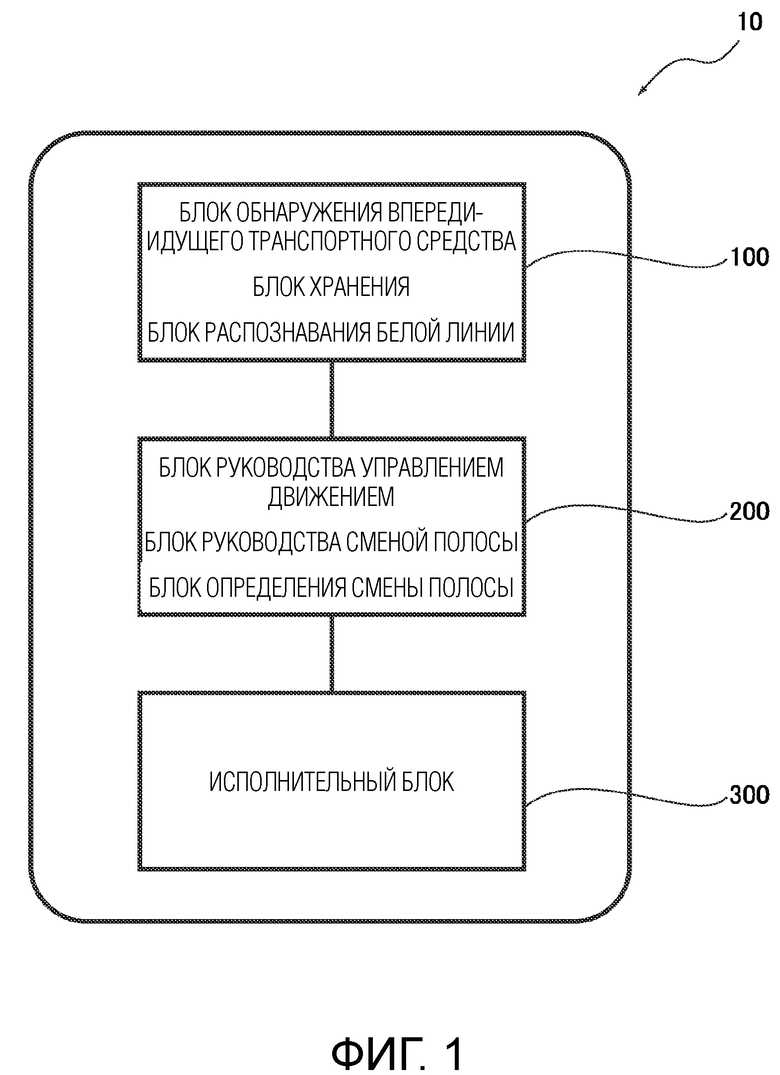
1. Способ автоматизированного управления сменой полосы для, по меньшей мере, автоматического управления рулевым управлением в эксплуатируемом транспортном средстве, содержащий этапы, на которых:
обнаруживают впередиидущее транспортное средство, движущееся в той же полосе движения, что и эксплуатируемое транспортное средство;
определяют, удовлетворено или нет предварительно заданное условие, на основе взаимосвязи между эксплуатируемым транспортным средством и впередиидущим транспортным средством; и
выполняют автоматическую смену полосы посредством эксплуатируемого транспортного средства через автоматизированное управление после истечения первого предварительно заданного времени исходя из определения того, что это предварительно заданное условие удовлетворено,
при этом способ управления отличается тем, что:
оценивают, соответствует или нет предыдущая смена полосы, осуществленная эксплуатируемым транспортным средством, намерению водителя;
устанавливают второе предварительно заданное время, которое продолжительнее первого предварительно заданного времени, в качестве времени, в течение которого запрещена смена полосы, которая должна быть осуществлена посредством автоматизированного управления, после оценки того, что предыдущая смена полосы соответствовала намерению водителя; и
запрещают смену полосы, осуществляемую посредством автоматизированного управления, в интервале, который начинается, когда запрещающее условие, которое запрещает смену полосы, осуществляемую посредством автоматизированного управления, удовлетворено, и заканчивается, когда истекает второе предварительно заданное время.
2. Способ управления по п. 1, в котором запрещающее условие удовлетворено, когда определено, что завершена предыдущая смена полосы в соответствии с намерением водителя.
3. Способ управления по п. 1, в котором запрещающее условие удовлетворено, когда определено, что завершена предыдущая смена полосы в соответствии с намерением водителя и упомянутое предварительно заданное условие удовлетворено.
4. Способ управления по п. 2 или 3, в котором
обнаружение впередиидущего транспортного средства осуществляют после завершения предыдущей смены полосы в соответствии с намерением водителя и
запрещение смены полосы, осуществляемое посредством автоматизированного управления, продолжают, пока не истечет третье предварительно заданное время, при определении на основе взаимосвязи между эксплуатируемым транспортным средством и впередиидущим транспортным средством того, что эксплуатируемое транспортное средство должно замедлиться на, по меньшей мере, предварительно заданную величину замедления или что относительная скорость эксплуатируемого транспортного средства относительно впередиидущего транспортного средства представляет собой, по меньшей мере, предварительно заданное значение, причем третье предварительно заданное время равно или больше первого предварительно заданного времени после того, как запрещающее условие удовлетворено, и меньше второго предварительно заданного времени.
5. Способ управления по п. 2 или 3, в котором
обнаружение впередиидущего транспортного средства осуществляют после завершения предыдущей смены полосы в соответствии с намерением водителя,
определяют, является или нет разность между скоростью транспортного средства впередиидущего транспортного средства во время обнаружения и текущей скоростью транспортного средства впередиидущего транспортного средства, по меньшей мере, предварительно заданной разностью, и
запрещение смены полосы, осуществляемое посредством автоматизированного управления, продолжают, пока не истечет третье предварительно заданное время, при определении того, что разность определена как, по меньшей мере, упомянутая предварительно заданная разность, причем третье предварительно заданное время равно или больше первого предварительно заданного времени после того, как запрещающее условие удовлетворено, и меньше второго предварительно заданного времени.
6. Способ управления по любому из пп. 1-5, дополнительно содержащий этап, на котором уведомляют водителя эксплуатируемого транспортного средства о том, что смена полосы, осуществляемая посредством автоматизированного управления, запрещена в интервале, который начинается, когда удовлетворено запрещающее условие, и заканчивается, когда истекает второе предварительно заданное время.
7. Способ управления по п. 6, в котором уведомление включает в себя отображение оставшегося времени до истечения второго предварительно заданного времени.
8. Способ управления по любому из пп. 1-7, в котором запрещение смены полосы, осуществляемое посредством автоматизированного управления, может быть отменено в интервале, который начинается, когда удовлетворено запрещающее условие, и заканчивается до истечения второго предварительно заданного времени.
9. Способ управления по любому из пп. 1-8, в котором упомянутое предварительно заданное условие включает в себя по меньшей мере одно из следующего: относительная скорость эксплуатируемого транспортного средства относительно впередиидущего транспортного средства является, по меньшей мере, значением по умолчанию; относительное местоположение между эксплуатируемым транспортным средством и впередиидущим транспортным средством меньше предварительно заданного расстояния; и прогнозируемое время столкновения с впередиидущим транспортным средством меньше времени по умолчанию.
10. Устройство автоматизированного управления сменой полосы, содержащее:
блок управления, выполненный с возможностью автоматически управлять, по меньшей мере, рулевым управлением эксплуатируемого транспортного средства;
блок обнаружения, выполненный с возможностью обнаруживать впередиидущее транспортное средство, движущееся в той же полосе движения, что и эксплуатируемое транспортное средство; и
блок оценки, выполненный с возможностью оценивать то, что смена полосы была выполнена в соответствии с намерением водителя,
при этом устройство управления отличается тем, что:
блок управления выполнен с возможностью выполнять смену полосы эксплуатируемого транспортного средства посредством автоматизированного управления после истечения первого предварительно заданного времени после определения того, что предварительно заданное условие удовлетворено, на основе взаимосвязи между эксплуатируемым транспортным средством и впередиидущим транспортным средством, и
блок управления выполнен с возможностью устанавливать второе предварительно заданное время, которое продолжительнее первого предварительно заданного времени, в качестве времени для запрещения смены полосы, осуществляемой посредством автоматизированного управления, после оценки того, что предыдущая смена полосы соответствовала намерению водителя, и запрещать смену полосы, осуществляемую посредством автоматизированного управления, в интервале, который начинается, когда запрещающее условие, которое запрещает смену полосы, выполняемую посредством автоматизированного управления, удовлетворено, и заканчивается, когда истекает второе предварительно заданное время.
| US 9682708 B2, 20.06.2017 | |||
| WO 2014029598 A1, 27.02.2014 | |||
| JP 2015011458 A, 19.01.2015. |

